Электрический привод производственного механизма
МИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное
государственное бюджетное образовательное учреждение высшего профессионального
образования
“НАЦИОНАЛЬНЫЙ
ИССЛЕДОВАТЕЛЬСКИЙ ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ”
Энергетический
институт
Кафедра
ЭПЭО
Электрический
привод производственного механизма
Пояснительная
записка к курсовому проекту
Исполнитель:
студент группы 7А94
В.Е. Карельский
Доцент, кандидат
техн. наук
Н.В. Кояин
Томск
2012
ВВЕДЕНИЕ
электродвигатель привод редуктор
Электрическим приводом называется
электромеханическое устройство, предназначенное для приведения в движение
рабочих органов машин и управления их технологическими процессами, состоящее из
передаточного, электродвигательного, преобразовательного и управляющего
устройств.
Электропривод является преобразователем
электрической энергии в механическую. Кроме функции преобразования энергии, на
электропривод возлагается важная функция управления технологическим процессом
приводимого в движение механизма. Электропривод органически сливается с
приводимым в движение исполнительным механизмом в единую электромеханическую
систему, от физических свойств которой зависят производительность, динамические
нагрузки, точность выполнения технологических операций и ряд других очень
важных факторов. Открываются широкие возможности для формирования путем
воздействия на систему управления электроприводом заданных законов движения
рабочих органов машин, осуществления связанного автоматического управления
взаимодействующими в технологическом процессе механизмами, оптимизации их
работы по тем или иным критериям.
Основной целью данной работы является
закрепление и систематизация знаний по автоматическому электроприводу, развитие
навыков самостоятельной работы с использованием специальной технической
литературы.
В данном курсовом проекте спроектирован
электропривод производственного механизма, на базе двигателя переменного тока,
удовлетворяющий заданным параметрам и режимам работы. В качестве передаточного
устройства используется редуктор, а в качестве управляющего используется
командоаппарат.
1.ИСХОДНЫЕ ДАННЫЕ
1.1Данные для
построения
nм1 =-35 об/мин - частота вращения в 1 рабочей
точке;= 20 с - время работы в 1 точке;м2 = 95 об/мин - частота вращения в 2
рабочей точке;= 30 с - время работы в 2 точке;п= 100 с - время паузы.
Характер нагрузки - реативная нагрузка;
Ммех.=450 Н×м - момент нагрузки
(механизма) на валу двигателя;
ηп. = 0.9 -
коэффициент полезного действия передачи;
Јмех. = 50 кг×м2 - момент инерции
механизма.
.2 Построение тахограммы и нагрузочной диаграммы
производственного механизма

Рисунок 1. Тахограмма производственного
механизма

Рисунок 2. Нагрузочная диаграмма
производственного механизма для активной нагрузки
2. РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ И ВЫБОР ЕГО
ПО КАТАЛОГУ. ОПРЕДЕЛЕНИЕ НАИВЫГОДНЕЙШЕГО ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ РЕДУКТОРА.
2.1Продолжительность включения
 %
%
Выбираем стандартное (15%, 25%, 40%,
60%), ближнее по величине значение продолжительности включения.
ПВкат =40%
2.2Диапазон регулирования

2.3 Среднеквадратичное значение
мощности за время работы на основании тахограммы и нагрузочной диаграмм
 =
= ,
,
где m - число рабочих участков в
цикле;
 - время работы на i-м участке
цикла;
- время работы на i-м участке
цикла;
 - коэффициент ухудшения теплоотдачи
на i-м участке цикла;
- коэффициент ухудшения теплоотдачи
на i-м участке цикла;
 - мощность нагрузки на валу
механизма на i-м участке цикла.
- мощность нагрузки на валу
механизма на i-м участке цикла.
.3.1 Значения угловых скоростей по
ступеням
- первая ступень
 рад/с,
рад/с,
- вторая ступень
 рад/с.
рад/с.
.3.2 Мощность на i-м участке работы:
первая ступень
 кВт,
кВт,
- вторая ступень
 кВт.
кВт.
.3.3 Коэффициент ухудшения
теплоотдачи по ступеням
 ,где
,где
 =0.95 - коэффициент ухудшения
теплоотдачи при неподвижном якоре (роторе), принимаемый для двигателей
закрытого исполнения без принудительного охлаждения;
=0.95 - коэффициент ухудшения
теплоотдачи при неподвижном якоре (роторе), принимаемый для двигателей
закрытого исполнения без принудительного охлаждения;
2.3.3.1 Для первого участка
 ,
,
2.3.3.2 Для второго участка
 .
.
.4 Пересчет среднеквадратичной
мощности двигателя на выбранное стандартное значение ПВ=40%.
 кВт,
кВт,
2.4.1 Расчетная мощность
электрического двигателя.
 ,
,
где kЗ =(1.1-1.3) - коэффициент
запаса;
ηмех=0.9 - КПД передачи при
nмакс,
Принимаем kЗ=1.3.
 кВт.
кВт.
2.5 Выбираем двигатель постоянного тока независимого
возбуждения типа Д-31, имеющий следующие паспортные данные (таблица 1).
Таблица 1 - паспортные данные выбранного ДПТНВ
|
Тип
|
UH,
В
|
РН,
кВт
|
nН,
об/мин
|
IH,A
|
Rдв.
,Ом
|
Jдв.
, кг×м2
|
|
Д-31
|
220
|
6,8
|
880
|
37
|
0,42
|
0,3
|
.6 Передаточное отношение редуктора


где  - номинальная угловая скорость
вращения двигателя.
- номинальная угловая скорость
вращения двигателя.
 рад/с
рад/с
Принимаем передаточное отношение
редуктора из стандартного ряда передаточных чисел (при условии, что iр.ст ≤iр
).
iр.ст = 8
3. РАСЧЁТ И ПОСТРОЕНИЕ ЕСТЕСТВЕННЫХ МЕХАНИЧЕСКИХ
И ЭЛЕКТРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ
3.1 Сопротивление якоря горячее
 Ом,
Ом,
где τ= 75°С- перегрев
обмоток двигателя относительно начальной температуры (15°С).
.2 Коэффициент полезного действия
при номинальной нагрузке
 .
.
3.3 Коэффициент ЭДС двигателя
 .
.
3.4 Номинальный момент на валу
двигателя
 Н·м.
Н·м.
3.5 Электромагнитный момент,
соответствующий номинальному току
 Н·м.
Н·м.
3.6 Момент трения на валу электродвигателя
 Н·м.
Н·м.
3.7 Скорость идеального холостого
хода
 рад/с.
рад/с.
3.8 Скорость вращения по ступеням
 ;
;
 ;
;
Или
 ;
;
 .
.
3.9 Момент статический по ступеням
для реактивной нагрузки
3.9.1 I и III квадранты
работы(двигательный режим)моменты ступени определяются по выражению

где Ммах=Ммех=450 Н∙м.


.10 Расчет естественных
электромеханической ω=f(I) и
механической ω=f(М)
характеристик двигателя (рисунок 3)
Выражения для расчета
электромеханической и механической характеристик имеют вид:
 ,
,  .
.
Т.к. между током и моментом у
двигателя постоянного тока независимого возбуждения имеется линейная зависимость
М=с·I, то для получения механической характеристики достаточно пересчитать по
оси Х численные значения токов на значения моментов. Расчетные данные сведены в
таблицу 2.
Таблица 2.
|
I,
A
|
0
|
Iн
=37
|
2·
Iн=74
|
|
M,
Н·м
|
0
|
80,22
|
160,44
|
|
ω,
рад/с
|
101,5
|
92,15
|
82,84
|
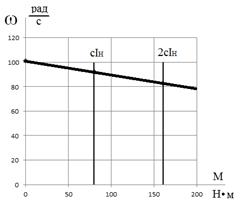

Рисунок 3. Естественные электромеханическая ω=f(I)
и
механическая ω=f(М) характеристики
двигателя.
4. РАЧЕТ И ВЫБОР ПО КАТАЛОГУ ПРЕОБРАЗОВАТЕЛЬНЫХ
УСТРОЙСТВ ИЛИ ПУСКОВЫХ И РЕГУЛИРОВОЧНЫХ РЕОСТАТОВ
.1 Наибольшие пусковые ток и момент определяются
из условий
Iпуск =(1,5÷2)∙Iн
=2∙ Iн =2∙37=74 А;
М пуск =с∙ Iпуск =2,17∙74=160,44Н·м.
4.2 Ток и момент переключения определяются из
условий
Iпер =1.2∙ Iн =1.2∙37=44,4 А;
Мпер=с∙Iпер= 2,17·44,4=96,26 Н·м.
4.3 Необходимые сопротивления якорной цепи
4.3.1 Определяем необходимые сопротивления
якорной цепи для пусковых и рабочих ступеней характеристик(пуск в одну
ступень):

Расчет добавочных сопротивлений производим
по механической характеристики, представленной на рисунке 4.
Рассчитаем пусковое
сопротивление(Rя.пуск=R01)(оно же для первой рабочей ступени)
 ,
,  ,
,
Rя .ст.1=Rя .пуск = 4,92 Ом.
Определим добавочное сопротивление для первой
рабочей ступени:
 Ом.
Ом.
Рассчитаем первое промежуточное
сопротивление(Rя.пр.1=R23):
 ,
,  ,
,
Rя.пр.1= 3,83 Ом.
Добавочное первое промежуточное
сопротивление :
 Ом.
Ом.
Рассчитаем второе промежуточное
сопротивление (Rя.пр.2=R45):
Для определения второго
промежуточного сопротивления необходимо рассчитать скорость в точке 4, которая
равна скорости в точке 3(ω3=ω4)
 ,
, 
Зная скорость в точке 4 определяем
второе промежуточное сопротивление:
 ,
,  ,я.пр.2=2,39 Ом.
,я.пр.2=2,39 Ом.
Добавочное второе промежуточное сопротивление:
 Ом.
Ом.
Рассчитаем сопротивление для второй
рабочей ступени(Rя.ст2=R67)
 ,
,  ,я .ст2=1,49 Ом.
,я .ст2=1,49 Ом.
Добавочное сопротивление для второй
рабочей ступени:
 Ом.
Ом.
4.3.2 Для полученных значений
добавочных сопротивлений построим рабочие механические характеристики по
ступеням
Расчетные данные сведем в таблицу 3
Таблица 3
|
Пусковая
характеристика и первая рабочая ступень
|
|
М,
Н·м
|
0
|
Мпер=-96,26
|
М1=-68,93
|
|
ω,
рад/с
|
-101,5
|
0
|

|
|
Первая
промежуточная ступень
|
|
М,
Н·м
|
0
|
Мпер=100
|
Мпуск=160,44
|
|
ω,
рад/с
|
101,5
|
19,99
|
|
|
Вторая
промежуточная ступень
|
|
М,
Н·м
|
0
|
Мпер=100
|
Мпуск=160,44
|
|
ω,
рад/с
|
101,5
|
50,63
|
19,99
|
|
Вторая
рабочая ступень
|
|
М,
Н·м
|
0
|
Мс=68,93
|
Мпуск=160,44
|
|
ω,
рад/с
|
101,5
|
 50,63 50,63
|
|
По данным таблицы 3 строим пусковые
регулировочные и промежуточные механические характеристики (см. рисунок 4).

Рисунок 4 - Механические характеристики
двигателя:
-пусковая характеристика и первая рабочая
ступень; 23 -первая промежуточная характеристика; 45 -вторая промежуточная
характеристика; 67 - вторая рабочая ступень.
4.4Определяем токи по ступеням
для первой ступени=Mc1/c=68,93/2,17=31,79A;
для второй ступени=Mc2/c=68,93/2,17=31,79A.
.5Продолжительность включения


.6Расчётные токи, средние за время
работы
 А.
А.
 А.
А.
.7 Каталожный ток для каждой ступени
 А.
А.
 А.
А.
4.8 Выбираем ящики сопротивлений по наибольшему
току, удовлетворяющему условию Iдоп>Iкат.расч
Rд.ст1=4,37 Ом, Rд.ст2=0,94 Ом

 Ом,
Ом,
 - работает только на первой
ступени;
- работает только на первой
ступени;
 - работает всё время .
- работает всё время .
Выбираем ящик сопротивлений №105,
технические характеристики которого представлены в таблице 4.
Таблица 4 - технические
характеристики ящика сопротивлений №105.
|
Продолжительный
ток, А
|
Сопротивление
ящика, Ом
|
Сопротивление
элемента, Ом
|
Число
элементов
|
|
33
|
4.2
|
0.105
|
40
|
Схема соединений резисторов для первой ступени
представлена на рисунке5.

Рисунок 5 - схема соединений резисторов для
первой ступени.
*Вначале соединены последовательно 32 резистора.
 Ом
Ом
Для второй ступени соединяем
последовательно 9 резисторов:
 Ом.
Ом.
5. РАСЧЁТ ЭЛЕКТРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДЛЯ
ДВИГАТЕЛЬНОГО И ТОРМОЗНОГО РЕЖИМОВ
5.1 Делаем пересчет механических характеристик
двигателя для полученных значений сопротивлений
Полученные значения заносим в таблицу 5.
Rд.ст1’=3,43 Ом, Rд.ст2=0,945
Ом
Rд.ст1= Rд.ст1’+
Rд.ст2=3,43+0,945=4,375Ом
Rя.ст1=Rд.ст1 +Rдв.гор=4,375+0,55=4,925 Ом (было
4,92 Ом)я.ст2=Rд.ст2 +Rдв.гор =0,945+0,55=1,495 Ом (было 1,49 Ом)
5.2Пересчет механических характеристик с учетом
новых сопротивлений
5.2.1Пересчет скорости для первой рабочей
ступени

сравниваем на сколько отличается
скорость от первоначальной

Так как 0,1%<5 %, то выбранное
каталожное сопротивление нас удовлетворяет.
5.2.2Пересчет скорости для второй рабочей
ступени

сравниваем на сколько отличается
скорость от первоначальной

Так как 0,123%<5 %, то выбранное
каталожное сопротивление нас удовлетворяет.
Таблица 5.
|
Пусковая
характеристика и первая рабочая ступень
|
|
М,
Н·м
|
0
|
Мпер=-96,26
|
М1=-68,93
|
|
ω,
рад/с
|
-101,5
|
0
|

|
|
Первая
промежуточная ступень
|
|
М,
Н·м
|
0
|
Мпер=100
|
Мпуск=160,44
|
|
ω,
рад/с
|
101,5
|
19,99
|
|
|
Вторая
промежуточная ступень
|
|
М,
Н·м
|
0
|
Мпер=100
|
Мпуск=160,44
|
|
ω,
рад/с
|
101,5
|
50,63
|
19,99
|
|
Вторая
рабочая ступень
|
|
М,
Н·м
|
0
|
Мс
=68,93
|
Мпуск=160,44
|
|
ω,
рад/с
|
101,5
|
 50,445 50,445
|
|
.3 После работы на двух заданных скоростях (ωи1
и ωи2)
двигатель необходимо затормозить до нулевой скорости
При реактивном характере нагрузки
производственного механизма примем вид торможения -динамическое. Расчет
механической характеристики при динамическом торможении проводится на основании
выражения:
 .
.
RДТ=R89(рисунок 6)
Определяем необходимое сопротивление
якорной цепи для режима динамического торможения. Для этого режима работы при
начальном моменте торможения М, равному М=Мпуск=160,44Н·м, необходимо
обеспечить скорость ω=ωи2= 79,498
рад/с. Добавочное сопротивление ступени определяется из выражения
 ,
,  ,
,
Rдв.гор+ RДТ=
2,33Ом;
RДТ=2,33-0,55=1,78
Ом.
Данные для построения характеристики
динамического торможения заносим в таблицу 6.
Таблица 6.
|
М,
Н·м
|
0
|
-160,44
|
|
ω,
рад/с
|
0
|
49,768
|
Строим механические характеристики полного цикла
работы двигателя при реактивном характере нагрузки производственного механизма
(Рисунок 6).

Рисунок 6: Механические характеристики полного
цикла работы двигателя:
-пусковая характеристика и первая рабочая
ступень; 23 -первая промежуточная характеристика; 45 -вторая промежуточная
характеристика; 67 - вторая рабочая ступень, 89 - характеристика динамического
торможения.
6. РАСЧЁТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ω=f(t),
М=f(t)
ЗА ЦИКЛ РАБОТЫ И ПОСТРОЕНИЕ НАГРУЗОЧНОЙ ДИАГРАММЫ ЭЛЕКТРОПРИВОДА
.1 Расчет переходных процессов проводим по
выражениям
 ,
,
 ,
,
 ,
,
где Мнач, Iнач, ωнач - начальные
значения соответственно момента, тока и скорости;
Мкон, Iкон, ωкон -
конечные значения соответственно момента, тока и скорости;- текущее время, с;
 - электромеханическая постоянная
времени, с;
- электромеханическая постоянная
времени, с;
JΣ - суммарный момент инерции,
кг·м2;
 ;
;
k=(1.5÷1.3) - коэффициент,
учитывающий момент инерции редуктора,
принимаем k=1,4;дв - момент инерции
двигателя, кг·м2;мех - момент инерции механизма, кг·м2;
 - передаточное число редуктора;-
суммарное сопротивление якорной цепи на соответствующей характеристике, Ом;
- передаточное число редуктора;-
суммарное сопротивление якорной цепи на соответствующей характеристике, Ом;
с - коэффициент ЭДС двигателя,  .
.
 кг·м2.
кг·м2.
.2Переходные процессы первой рабочей
ступени(пусковая характеристика - участок 01 - рисунок 6).
Rя.ст.1= Rя.пуск1=4.925 Ом;  с;
с;
 Н·м; Мкон.=Мс2= -68.93Н·м.
Н·м; Мкон.=Мс2= -68.93Н·м.
ωнач=0рад/с;  рад/с.
рад/с.
Полученные значения начальных,
конечных значений момента и скорости подставляем в выражения для расчёта
переходных процессов:


Полученные расчетные значения
заносим в таблицу 7.
Таблица 7.
|
t,
с
|
0
|
0,9
|
1,8
|
2,7
|
3,6
|
5,8
|
|
М,
Н∙м
|
-96,934
|
-82,6
|
-75,6
|
-72,19
|
-70,52
|
-69,7
|
-69,93
|
|
ω,
рад/с
|
0
|
-14,99
|
-22,31
|
-25,88
|
-27,62
|
-28,48
|
-29,289
|
|
n,
об/мин
|
0
|
-143,23
|
-213,15
|
-247,28
|
-263,94
|
-272,08
|
-277,08
|
По данным таблицы 7 строим графики переходных
процессов М=f(t) и n= f(t) для режима работы на первой рабочей ступени(пусковой
характеристики):

Рисунок 7 - Переходные процессы М=f(t) и n= f(t)
для пуска двигателя, с выходом на рабочую скорость первой рабочей
ступени.(tпп=5,8с -время переходного процесса.)
.3 Переходные процессы двух промежуточных
ступеней, с выходом на вторую рабочую скорость(участки 23,45,67 рисунок 6)
Первая промежуточная ступень:
Rя.пр1=3,83 Ом;  с;
с;
 Н·м; Мкон.фикт= Мс1 = 68,93Н·м.
Н·м; Мкон.фикт= Мс1 = 68,93Н·м.
При расчёте переходного процесса
М=f(t) для первой промежуточной ступени в качестве конечного значения момента
берётся величина Мкон.фикт , а расчёт ведётся до значения момента равномуМпер.принят=100
Н·м.
ωнач=ωИ1=-29,289рад/с;
 рад/с.
рад/с.
При расчёте переходного процесса ω=f(t) для первой
промежуточной ступени в качестве конечного значения скорости берётся величина , а расчет
ведётся до значения скорости, равной:
, а расчет
ведётся до значения скорости, равной:
 рад/с.
рад/с.
Полученные значения начальных,
конечных значений момента и скорости подставляем в выражения для расчёта
переходных процессов:


Полученные расчетные значения, для
первой промежуточной ступени, заносим в таблицу 8.
Таблица 8
|
t,
с
|
0
|
0,2
|
0,35
|
0,5
|
0,75
|
0,95
|
1,05
|
1,054
|
|
М,
Н∙м
|
160,44
|
143,45
|
132,86
|
123,75
|
111,36
|
103,5
|
100,14
|
100
|
|
ω,
рад/с
|
-29,289
|
-15,47
|
-6,8
|
0,62
|
10,72
|
17,13
|
19,87
|
20
|
|
n,
об/мин
|
-279,831
|
-147,77
|
-65,04
|
5,89
|
102,38
|
163,62
|
189,84
|
190,92
|
Вторая промежуточная ступень:
Rя.пр2=2,39 Ом;  с;
с;
Н·м; Мкон.фикт= Мс1 = 68,93Н·м.
При расчёте переходного процесса
М=f(t) для второй промежуточной ступени в качестве конечного значения момента
берётся величина Мкон.фикт , а расчёт ведётся до значения момента
равномуМпер.принят=100 Н·м.
ωнач=20 рад/с;  рад/с.
рад/с.
При расчёте переходного процесса ω=f(t) для второй
промежуточной ступени в качестве конечного значения скорости берётся величина, а расчет
ведётся до значения скорости, равной:
 рад/с.
рад/с.
Полученные значения начальных,
конечных значений момента и скорости подставляем в выражения для расчёта
переходных процессов:


Полученные расчетные значения, для
второй промежуточной ступени, заносим в таблицу 9.
Таблица 9.
|
t,
с
|
0
|
0,1
|
0,2
|
0,3
|
0,4
|
0,5
|
0,6
|
0,658
|
|
М,
Н∙м
|
160,44
|
146,58
|
134,82
|
124,85
|
116,38
|
109,19
|
103,09
|
100
|
|
ω,
рад/с
|
20
|
27,03
|
32,99
|
38,05
|
42,34
|
45,98
|
49,07
|
50,63
|
|
n,
об/мин
|
191,08
|
258,21
|
315,17
|
363,5
|
404,52
|
439,33
|
468,86
|
483,89
|
Переходные процессы для второй рабочей ступени:
Rя.ст2=1,495 Ом;  с;
с;
Н·м; Мкон. = Мс1= 68,93Н·м;
ωнач=50,63 рад/с;
 рад/с.
рад/с.
Полученные значения начальных,
конечных значений момента и скорости подставляем в выражения для расчёта
переходных процессов:


Полученные расчетные значения, для
второй промежуточной ступени, заносим в таблицу 10.
Таблица 10.
|
t,
с
|
0
|
0,3
|
0,6
|
0,9
|
1,35
|
1,8
|
|
М,
Н∙м
|
160,44
|
110,57
|
87,88
|
77,55
|
71,58
|
68,93
|
|
ω,
рад/с
|
50,63
|
66,36
|
73,52
|
76,78
|
78,66
|
79,498
|
|
n,
об/мин
|
483,73
|
634,03
|
702,43
|
733,55
|
751,56
|
758,621
|
По данным таблиц 8, 9, 10 строим переходные
процессы - рисунок 8:

Рисунок 8 - Графики переходных процессов М=f(t)
и n= f(t):- первая промежуточная ступень(участок 23 - рисунок 6)-tпп=1,05-
вторая промежуточная ступень(участок 45 рисунок 6)-tпп=0,65- выход на рабочую
скорость второй рабочей ступени (участок 45 рис.6) -tпп=1,8.
.4Расчёт переходных процессов тормозных режимов
работы
Режим динамического торможения при
реактивном характере нагрузке производственного механизма (участок 89 - рисунок
6) от до 0.
до 0.
Rдв.гор+ RДТ= 2,33Ом;
 с.
с.
 рад/с
рад/с
При расчете переходного процесса ω=f(t) для режима
динамического торможения в качестве конечного значения скорости берётся
величина ωкон.фикт
(точка 10 рисунок 10), которая определяется из выражения:
 рад/с, а расчет ведётся до значения
скорости равной нулю.
рад/с, а расчет ведётся до значения
скорости равной нулю.
При расчёте переходного процесса
M=f(t) для режима динамического торможения:
 Н∙м
Н∙м Н∙м, а
расчёт ведётся до значениямомента, равному нулю.
Н∙м, а
расчёт ведётся до значениямомента, равному нулю.
Полученные значения начальных,
конечных значений момента и скорости подставляем в выражения для расчёта
переходных процессов:
 25.3.
25.3.
Рассчитываем переходные процессы
прехода двигателя с первой рабочей скорости

Полученные расчетные значения, для
второй промежуточной ступени, заносим в таблицу 11.
Таблица 11.
|
t,
с
|
0
|
0,1
|
0,2
|
0,3
|
0,4
|
0,5
|
0,6
|
0,714
|
|
М,
Н∙м
|
-160,44
|
-124,9
|
-94,87
|
-69,49
|
-48,0421
|
-29,92
|
-14,6
|
0
|
|
ω,
рад/с
|
70,4
|
54,7
|
41,45
|
30,24
|
20,7748
|
12,77
|
6,01
|
0
|
|
n,
об/мин
|
672,61
|
522,69
|
396,01
|
288,94
|
198,49
|
122,03
|
57,42
|
0
|
По данным таблицы 11 строим графики переходных
процессов М=f(t) и n= f(t) для режима динамического торможения:

Рисунок 9 - графики переходных процессов М=f(t)
и n= f(t) динамического торможения.(tпп=0,714).
По данным таблиц 7,8,9,10,11 строим графики
переходных процессов М=f(t) и n= f(t) полного цикла работы:

Рисунок 10 - графики переходных процессов М=f(t)
и n= f(t) заданного цикла работы:- пуск двигателя с выходом на первую рабочую
ступень; II-работа на первой рабочей ступени;III - работа двигателя на первой
промежуточной ступени; IV-работа двигателя на второй промежуточной ступени; V
-выход на рабочую скорость второй рабочей ступени; VI-работа на второй рабочей
ступени; VII - динамичесое торможение двигателя.
7.ПРОВЕРКА ВЫБРАННОГО ЭЛЕКТРОДВИГАТЕЛЯ НА НАГРЕВ
.1 Проверка двигателя по нагреву (метод
эквивалентных величин)
Метод эквивалентного тока
 ,
,
где  - определяем через площадь графика
I2=f(t)(рисунки:11,12,13);р - суммарное время работы на скоростях ωи1 и ωи2;пп -
суммарное время переходных процессов.
- определяем через площадь графика
I2=f(t)(рисунки:11,12,13);р - суммарное время работы на скоростях ωи1 и ωи2;пп -
суммарное время переходных процессов.
Пуск двигателя в одну ступень и
работа на первой скорости:
Таблица 12
|
t,
с
|
0
|
0,9
|
1,8
|
2,7
|
3,6
|
4,5
|
5,8
|
25,8
|
|
Iст.12,
А2
|
1995,41
|
1488,96
|
1213,84
|
2087,63
|
1056,1
|
1031,87
|
1017,1
|
1017,1
|

Рисунок 11 - Режим пуска двигателя в одну
ступень и работа на первой рабочей скорости.
Определяем I2ст.1:

Найдём I2ст.1 в программе MathCad:

Переход на вторую рабочую скорость,
через две промежуточные ступени:
Первая промежуточная ступень:
Таблица 13.
|
t,
с
|
25,8
|
26
|
26,15
|
26,3
|
26,55
|
26,75
|
26,85
|
26,854
|
|
Iпр.ст12,
А2
|
5466,46
|
4372,1
|
3748,79
|
123,75
|
3252,44
|
2275,05
|
2129,44
|
2123,6
|
Вторая промежуточная ступень:
Таблица 14.
|
t,
с
|
26,85
|
26,95
|
27,05
|
27,1
|
27,15
|
27,35
|
27,45
|
27,512
|
|
Iпр.ст.22,
А2
|
5466,46
|
4562,94
|
3860,22
|
3568,53
|
3309,9
|
2532,03
|
2257,16
|
2123,3
|
Вторая рабочая ступень и работа на ней:
Таблица 14.
|
t,
с
|
27,512
|
27,81
|
28,11
|
28,41
|
28,86
|
29,65
|
59,65
|
|
Iст.22,
А2
|
5466,46
|
2596,27
|
1639,95
|
1277,2
|
1087,97
|
1032,93
|
1032,93
|

Рисунок 12 - режим перехода двигателя с первой
скорости на вторую, через две промежуточные ступени.
Определяем I2пр.ст.1:

Найдём I2пр.ст.1 в программе
MathCad:

Определяем I2пр.ст.2:

Найдём I2пр.ст.2 в программе
MathCad:

Определяем I2ст.2:

Найдём I2ст.2 в программе MathCad:

Режим динамического торможения со
второй рабочей ступени до нулевой скорости:
|
t,
с
|
59,65
|
59,75
|
59,85
|
59,95
|
60,05
|
60,15
|
60,25
|
60,36
|
|
IДТ2,
А2
|
5466,46
|
3312,93
|
1911,28
|
1025,45
|
490,146
|
190,087
|
45,28
|
0
|

Рисунок 13 - режим динамического торможения.
ОпределяемI2ДТ.1:


Правильность выбора двигателя
определяется условием:

Имеем:

tр=20+30=50 сек, - время работы
ступеней;
 - суммарное время переходных
процессов, тогда
- суммарное время переходных
процессов, тогда

Условие проверки двигателя по
нагреву:
,  ,
, А.
А.
Условие проверки по нагреву
выполняется.
ЗАКЛЮЧЕНИЕ
В данной работе спроектирован электрический
привод производственного механизма с параметрическим регулированием скорости
двигателя.
Выбран двигатель постоянного тока
последовательного возбуждения типа Д-31, рассчитаны и построены естественные и
регулировочные механические и электромеханические характеристики двигателя. Был
выбран реостатный способ пуска и регулирования скорости. Для осуществления
торможения двигателя до нулевой скорости после выполнения рабочих циклов
используют динамическое торможение. Рассчитаны и построены переходные
характеристики n=f(t) и М=f(t) за цикл работы, произведена проверка выбранного
двигателя на нагрев.Выбранный двигатель удовлетворяет требованиям
производственного механизма.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1.Вешеневский
С.Н. Характеристики двигателей в электроприводе. Изд. 6-е, исправленное. М.,
«Энергия», 1977.
.Кацман
М.М. Электрические машины: Учебник для сред.спец. учеб. заведений.- М.: Высш.
школа, 1983.-432 с., ил.
.
Чиликин М. Г., Сандлер А. С. Общий курс электропривода. - М.: «Энергоиздат»,
1981. - 576 с.
.Методические
указания по выполнению курсового проекта для студентов специальностей 140604
“Электропривод и автоматика промышленных установок и технологических
комплексов”. Томск: изд. ТПУ, 2004.- 55с.
Составители:
доц., канд. техн. наук Ю.П.Кастюков
доц.,
канд. техн. наук Я.В. Петров
доц.,
канд. техн. наук Ю.Н. Деменьтьев
.
Методические указания по выполнению курсового проекта для студентов
специальностей 140604 “Электропривод и автоматика промышленных установок и
технологических комплексов”. Томск: изд. ТПУ, 2004.- 15с.
.
Чернышев А.Ю., КояинН.В.Проектирование электрических приводов: Учебно-метод.
Пособие. - Томск: Изд-во ТПУ, 2005.-120с.
