Классификация беспилотных летательных аппаратов
Выполнение различных задач, как в военной, так и в
гражданской сфере, существенной расширяют линейку БЛА, которые можно применять
для этой цели. Уже сейчас ясно, что в ближайшем будущем потребуется несколько
платформ, с разными типами двигателей и, самое главное, с различным комплектом
бортовой аппаратуры.
Можно отметить, что самый многочисленный класс «беспилотников»,
на сегодняшний день в России, это электролеты массой до 15 кг. Почти все они
способны летать не более 2-х часов, взлетают, как правило, с применением
стартовых устройств и садятся, в большинстве случаев, на парашюте. Сравнительно
небольшая взлетная масса ограничивает и массу полезной нагрузки, поэтому,
большинство из этих БЛА, имеют сменную полезную нагрузку, что само по себе, в
этой ситуации, оправдано.
Существует большое количество задач, как в военной,
так и в гражданской сфере, которые могут быть успешно решены при использовании
таких аппаратов. Эти БЛА должны стоить дешево, применяться
малоквалифицированными в летном отношении специалистами, не требовать
серьезного обслуживания и быть мобильными без применения спец.транспорта.
Наземная часть такой системы должна быть проста и удобна в эксплуатации.
Собственно по такому пути и идут большинство разработчиков данных систем.
Учитывая малый вес полезной нагрузки, существенно возрастают требования к
бортовым датчикам оптического и инфракрасного диапазона. Датчики системы должны
выполнять в основном наблюдательные функции и в меньшей степени измерительные.
Для эксплуатации данных систем не нужно создавать
специальных подразделений. Высокая степень автоматизации должна позволить
эксплуатировать эти системы рядовым специалистам как в военной, так и в
гражданской сфере.
Следующей ступенью в классификации применения БЛА,
стоит задача создания «беспилотников» для проведения разведки земной
поверхности и водной акватории на удалении в 100 км. Для выполнения
таких задач должна применяться «беспилотная» техника, способная летать днем и
ночью, в простых и сложных метеоусловиях. Видимо такая техника должна быть
способна детально обследовать район до 1000 км2 за один
вылет. Это может обеспечить только БЛА, способные летать не менее 10 часов.
Удаление в 100 км обуславливается расстоянием прямой радиовидимости с высоты до
3 тыс. м, на котором можно, без ретранслирования сигнала, обеспечить передачу
потокового изображения в режиме реального времени. Нетрудно подсчитать, что при
полете по прямой, с условием возврата в точку вылета, такой БЛА способен
отлететь на расстояние в 600 км. Аппарат способный летать 10 часов будет имеет
взлетный вес 100 - 200 кг и, конечно, потребует взлетно-посадочную
полосу длиной не менее 300 м, а также обслуживание квалифицированным экипажем.
В настоящее время такие аппараты способны взлетать с применением стартовых
устройств
Эти БЛА могут входить у военных в состав
разведывательного подразделения такого формирования как бригада (быть дневным и
ночным зрением бригады), у гражданских специалистов применяться в составе
эксплуатирующей его организации. Для Погранвойск ФСБ такие аппараты могут входить
в состав такого подразделения как отряд и обеспечивать контроль за значительным
участком границы, особенно в условиях высокогорья, в районах крайнего Севера и
в условиях охраны морской границы. Передача видео и фотоизображения в реальном
масштабе времени позволяет организовать взаимодействие с другими техническими
средствами охраны Государственной границы.
Средства наземного обеспечения работы таких комплексов
формируются на основе мобильных пунктов управления (МПУ), размещаемых, как
правило, на шасси автомобиля, а также из передвижных временных пунктов
управления (ПВПУ), размещаемых в местах обеспечения взлета/посадки БЛА.
Возможность размещать ПВПУ непосредственно на территории заставы позволяет
получать информацию в своей зоне ответственности в режиме реального масштаба
времени при пролете БЛА вдоль границы. Учитывая продолжительность полета данных
БЛА, можно говорить о том, что одно подразделение БЛА, состоящее из одного-двух
комплексов способно контролировать участок границы протяженностью до 1000 км.
ПО АРМ управления полетом БЛА
Программное обеспечение (ПО) позволяет отображать на
мониторе АРМ пилота-оператора видеоизображение с камеры переднего обзора и
индицирует телеметрическую информацию. Отображение телеметрической информации
выполняется в режиме «индикатор на лобовом стекле», или в режиме «виртуальных
приборов». На мониторе также синтезируется положение точек полетного задания и
другая пространственная информация, помогающая пилоту контролировать полет БЛА
на маршруте.

Рисунок 1: Кадр ПО АРМ
пилота-оператора.
ПО АРМ управления полетом БЛА позволяет пилоту-оператору:
- контролировать полет БЛА при
выполнении маршрута и посадки;
- изменять полетное задание при
выполнении полета в зоне радиовидимости;
- автоматически получать предупреждения
о выходе БЛА за пределы установленных ограничений (по скорости полета, крену,
тангажу, высоте полета над рельефом местности).
ПО имеет интуитивно понятный интерфейс, предохраняя
операторов от возможных ошибок. Модульная архитектура ПО позволяет его
настраивать для работы на компьютерах с различными характеристиками,
подключении новых органов управления или исполнительных механизмов.
ПО АРМ оператора целевой аппаратуры
(наблюдателя)
программный обеспечение беспилотный летательный
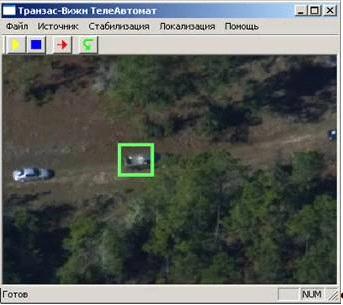
ПО АРМ наблюдателя (Рисунок 2) предназначено для поиска
цели, захвата и сопровождения цели, выдачи целеуказания. На мониторе
отображается видео с поворотной камеры БЛА, информация о направлении камеры,
информация о положении центра кадра на местности. Данное ПО позволяет
наблюдателю:
- управлять бортовой поворотной
оптико-тепловизорной головкой;
- управлять оптическим увеличением
камеры;
- определять координаты центра поля
обзора или любого объекта в поле обзора;
- обозначать цель, с автоматическим
определением ее координат;
- осуществлять захват и сопровождение
цели.

Рисунок 2: Кадр ПО АРМ наблюдателя.
ПО обработки и представления
видеоинформации
Электронная стабилизация видео применяется в ПО АРМ
наблюдателя и обеспечивает:
- улучшение восприятия видео, особенно
при наблюдении с большим увеличением, когда эффект дрожания камеры особенно
заметен;
- снижение требований к качеству
аппаратной стабилизации камеры или полный отказ от применения аппаратной
стабилизации, снижая вес и стоимость системы наблюдения;
- увеличение степени сжатия
изображений, что позволяет передавать данные на большее расстояние с лучшим
качеством.
Телеавтомат сопровождения
Телеавтомат сопровождения предназначен для захвата и
сопровождения цели. Телеавтомат обеспечивает автоматическое сопровождение цели
в любых реальных условиях: при изменении масштаба, угла обзора объекта,
изменении освещенности и контрастности объекта, при периодическом исчезновении
объекта из поля зрения.
Точность определения координат
объекта
Погрешность определения координат идентифицированного
или указанного оператором объекта на изображении определяется совокупностью
инструментальных и методических погрешностей.
К инструментальным погрешностям относятся:
- погрешность определения координат и
высоты БЛА;
- точность определения углов курса,
крена, тангажа БЛА;
- точность синхронизации момента
срабатывания затвора камеры с данными навигационной системы БЛА;
- погрешностью определения положения
камеры относительно датчиков навигационной системы (центра масс БЛА);
- погрешность определения дисторсии
камеры.
На величину методических погрешностей влияют:
- высота полета БЛА над рельефом
местности;
- расстояния от позиционируемого
объекта (цели) до точки надира (удаление цели);
- сложность рельефа местности.
С учетом приведенных факторов в современной
конфигурации БЛА «Дозор»:
Точность определения углов ориентации 0,1º
Точность определения курсового угла 1º
Точность синхронизации 0,1 сек
Дискретность информации ЦКРМ1 угл. сек. (на широте
Москвы эквивалентно 80 м)
Паспортная точность приемника ГНСС:
в плановых координатах 10 м
по высоте 20 м
При высоте полета над рельефом 1000 м со скоростью 100
км/ч суммарная ошибка определения координат объекта, расположенного под углом 30º от линии визирования камеры,
составит около 200 м (СКО).
Повышение точности может быть достигнуто путем
снижения инструментальных погрешностей (применения в составе навигационной
системы датчиков более высокой точности), либо за счет использования точной
заранее привязанной фотокарты местности, например, космического снимка.
Мы располагаем технологиями привязки, как к 2D-фотокарте, так и к 3D-фотокарте. Средняя точность
наложения составит 2-3 пикселя исходной карты, или порядка 5 м.
Склейка и коррекция мозаичного
фотоизображения
В результате площадной или протяженной съемки
образуется массив фотоснимков высокого разрешения. Каждый фотоснимок имеет
координатную привязку по данным навигационной системы БЛА и данные по углам
ориентации БЛА в момент производства снимка. Оригинальное ПО позволяет в
кратчайший срок после поступления массива снимков в компьютер НПУ произвести в
автоматическом режиме:
- коррекцию цвета и яркости снимков;
- одновременную сшивку кадров;
- ортотрансформирование;
- нарезку карты в мозаику.
Производительность работы ПО позволяет
обработать 1000 снимков, сделанных фотокамерой 12 Мпикс за 1 час.
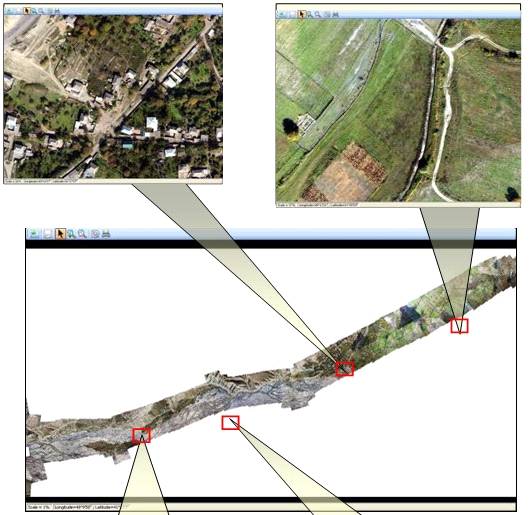

Рисунок
4: Склейка съемки протяженного объекта.
Варианты применения
Изложенные выше тактико-технические характеристики БЛА
серии «Дозор» и характеристики их бортовых систем позволяют применять БЛА для
целей воздушной разведки в качестве авиационной составляющей, обеспечивающей:
- круглосуточное наблюдение поля боя;
- скрытность разведки;
- возможность ведения разведки в
условиях низкой облачности;
- безопасность личного состава.
В
качестве иллюстрации применения БЛА в пределах радиовидимости построен маршрут
патрулирования БЛА вдоль государственной границы РФ с базированием в районе г.
Орск (Рисунок 5). При проектировании маршрута учитывалась паспортная дальность
командной радиолинии БЛА Дозор-85 (до 100 км). Таким образом, начальный и
конечный ППМ удалены от точки взлета (НПУ) соответственно на 65 км и 61 км.
Протяженность маршрута патрулирования составляет 135 км, и время в полете при
скорости патрулирования 100 км составляет 1ч 30 мин (с учетом кривизны
траектории). Учитывая подлетное время со скоростью 150 км/ч, суммарное время на
маршруте составит 2 ч 20 мин (общая протяженность маршрута 235 км).

Рисунок
6 воспроизводит маршрут
патрулирования, построенный исходя из ограничения максимальной
продолжительности полета БЛА. Общая протяженность маршрута составит 615 км (5 ч
30 мин), в том числе протяженность зоны патрулирования 355 км (3 ч 30 мин).
Следует подчеркнуть, что, выполняя полетное задание на маршруте предельной
эксплуатационной протяженности, БЛА не имеет возможности совершить облет
какой-либо точки по команде оператора, находясь вне зоны радиовидимости, и завершить
выполнение ПЗ. В зависимости от времени «задержки», маршрут должен быть
сокращен, а в конечных ППМ облет района невозможен.
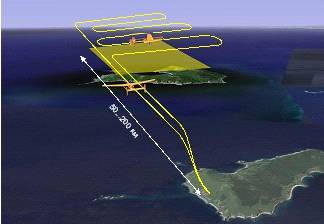
Концентрические
окружности радиусами:
· 50 км от точки старта примерно
соответствуют зоне достижимости в пределах 1 часа с момента поступления боевого
распоряжения на применение БЛА
· 100 км соответствует 1 ч 15 мин
· 200 км - предельный оперативный
радиус действия

Рекогносцировка местности
Рисунок
7 иллюстрирует применение БЛА для
разведки местности в течение 1 часа на предельной операционной дальности.
Предельная удаленность района разведки составляет 350 км. При скорости полета
150 км/ч БЛА достигнет зоны патрулирования за 2 ч 20 мин, может оставаться в
зоне в течение 1 часа и вернуться к точке старта. Общая продолжительность
полета составит 5 ч. 30 мин.

Рисунок 7
Разведка в горной местности. Учет особенностей
рельефа местности
Планирование полета БЛА в горных условиях проводится с
использованием цифровых карт рельефа местности (ЦКРМ). Имеющиеся в свободном
доступе коммерческие ЦКРМ, полученные по результатам космической съемки,
обеспечивают достаточную точность определения высоты рельефа местности в
сочетании с точной координатной привязкой.
Опыт применения БЛА «Дозор-90 Э» в
горной местности
В
2008 году была проведена опытная эксплуатация комплекса с БЛА «Дозор-90 Э» в
интересах Пограничной службы ФСБ РФ (Рисунок 8). В период с 15 по 19 октября
совершено 11 полетов БЛА суммарной продолжительностью 5 ч 30 мин. Полеты
проводились в дневное время в простых и сложных метеоусловиях, при скорости
ветра у поверхности земли: встречный - 15 м/с, боковой - 10 м/с, попутный - 5
м/с. Взлет осуществлялся с площадки, расположенной на высоте 1000 м над уровнем
моря, максимальная высота полета БЛА - 3000 м.
В
работе БЛА «Дозор-90 Э» показал высокие летные и эксплуатационные качества, все
системы комплекса работали штатно.
По
результатам полетов составлена фотографическая карта территории полета, вдоль
границы РФ (Рисунок 8).

Рисунок
8: посадка БЛА на не подготовленную площадку в районе заставы
Применения БЛА в береговой зоне
Рассматривается сценарий наземного базирования
комплекса с БЛА и ведение разведки над морской акваторией на оперативной
дальности БЛА.
Штатные оптические средства целевого оборудования БЛА
могут применяться для ближней доразведки и идентификации цели.
В настоящее время главной технической составляющей
мониторинга обстановки на морских границах являются посты технического
наблюдения (ПТН), представляющие собой сеть береговых радиолокационных станций.
Дальность обнаружения цели РЛС ПТН составляет до 25 км. Такова же примерно
удаленность ПТН одного от другого. Применение БЛА совместно с ПТН позволит:
) существенно повысить дальность обнаружение цели;
) сократить время идентификации цели.
Патрулирование прибрежной зоны

При патрулировании в прибрежной зоне маршрут БЛА
прокладывается вдоль береговой линии за пределами дальности действия РЛС ПТН. В
дополнение к штатному оборудованию ПТН оснащаются аппаратурой связи с БЛА.
Таким образом, при облете маршрута БЛА постоянно находится в контакте с
ближайшим ПТН, передавая на него видео и фото информацию.
Одновременно, БЛА способны проводить идентификацию
обнаруженной цели с помощью оптических средств наблюдения, приблизившись к цели
на близкое расстояние. При этом цель может быть обнаружена, как непосредственно
БЛА, так и любым из ПТН данной сети. Во втором случае БЛА по команде оператора
осуществляет перелет в заданный район, прервав выполнение маршрута, либо,
поднявшись с места базирования.
Разведка удаленных целей
Для
ведения разведки удаленных целей, БЛА «Дозор» могут применяться автономно,
аналогично применению на предельной оперативной дальности (Рисунок 8).
Работая
вне зоны радиовидимости своего НПУ, аппаратура БЛА регистрирует всю информацию
целевой аппаратуры в бортовых накопителях. Анализ данных производится после
возвращения на базу. В другом варианте информация в реальном времени передается
на корабль, находящийся в зоне прямой радиовидимости с БЛА. Таким образом,
обнаружение цели и идентификация производится с помощью бортовых
оптико-электронных систем наблюдения.
Применение
БЛА совместно с дистанционно управляемым катером
Нами
прорабатывался вопросы взаимодействия морских и воздушных дистанционных средств
для ведения разведки над акваторией морей.
Предлагается
следующий алгоритм комплексного применения средств (Рисунок 9):
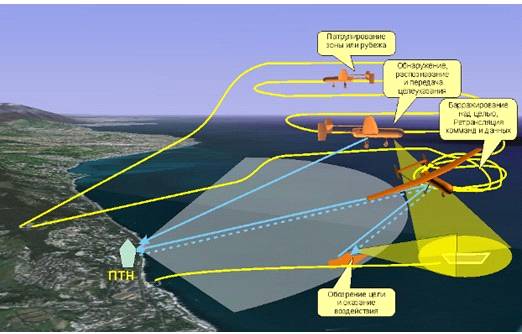
Рисунок 9: Комплексное применение дистанционных
средств разведки.
· совершающий разведывательный полет
БЛА обнаруживает цель и по каналу связи с ПТН передает ее координаты на пост
управления;
· принимается решение об оказании
воздействия;
· в район с заданными координатами
направляется дистанционно управляемый катер;
· во время движения катера БЛА
продолжает слежение за целью, осуществляя наведение катера;
· достигнув цели, катер осуществляет
воздействие на цель с фиксацией координат и времени. Данные в реальном времени
транслируются с помощью БЛА на ПТН и на НПУ.
Актуально и использование таких комплексов в борьбе с
браконьерами, к примеру, в Астраханских плавнях и в борьбе с наркотрафиком в
определенных районах нашей страны.
Наземное оборудование таких комплексов позволяет
оператору-дешифровщику производить распознавание целей и выдачу координат
найденных объектов с высокой степенью точности. Как использовать полученные
координаты решает сам потребитель такой системы.
Покажем на примере комплекса дешифратора,
разработанного фирмой «Транзас Вижн», как может происходить этот процесс:
Интеллектуальный комплекс дешифровки
изображений
Комплекс предназначен для подключения БЛА, как
источника информации, к потребителю.
Комплекс позволяет подключать к потребителю один или
несколько БЛА одновременно.
Функции комплекса
Комплекс автоматически выполняет следующие функции:
обработка информации с целью ее визуализации (фото,
видео, РСА, телеметрия)
обработка информации с целью получения точного
целеуказания
дешифровка изображений
подготовка вариантов формализованных сообщений
выдача потребителю сообщения, выбранного оператором
сохранение поступающей информации в базе данных
запись действий оператора
выдача обработанной информации на любой выбранный
потребителем уровень иерархии
Описание работы комплекса
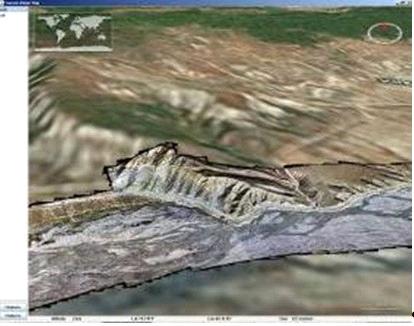
Визуализация
Комплекс отображает всю информацию в геоинформационной
среде Transas Globe, позволяющей просматривать растровые и векторные
карты, рельеф, 3D и движущиеся
объекты в единой 3D форме в
произвольном масштабе (до всей Земли включительно).
Телеметрия
Телеметрические данные отображаются в виде трека БЛА и
3D-модели БЛА (с учетом ее ориентации).
Одновременно может отображаться полетное задание БЛА.
Фото
Одиночные фотографии
Одиночные фотографии могут отображаться:
в ракурсе съемки (просмотр в Transas Globe с точки съемки)
в произвольном ракурсе

Фотография отображается в ортотрасформированном виде,
с учетом рельефа.
При указании пикселя фотографии автоматически
вычисляются координаты указанной точки поверхности Земли, с учетом
телеметрии, дисторсии камеры и рельефа.
На фотографию могут автоматически налагаться выбранные
оператором слои векторной карты.
Группы фотографии
Группы фотографий могут отображаться:
с наложением по исходным или уточненным
телеметрическим данным
в виде 3D-карт
(через восстановление 3D)
Видео
Видео может отображаться:
в ракурсе съемки (просмотр на Глобусе с точки съемки)
в произвольном ракурсе

Видео отображается в ортотрасформированном виде, с
учетом рельефа.
При указании пикселя видео автоматически
вычисляются координаты указанной точки поверхности Земли, с учетом
телеметрии, дисторсии камеры и рельефа.
На видео могут автоматически налагаться выбранные
оператором слои векторной карты а также телеметрическая информация.

Точное целеуказание
Для точного целеуказания применяются следующие методы:
сшивка последовательных кадров
подшивка кадра к фотооснове
сшивка карты

Дешифровка изображений
Для дешифровки изображений применяются следующие
методы:
Дешифровка фото и отдельных кадров
видео
- распознавание с самообучением
фрактальный анализ
спектральный анализ
поиск по особым точкам

Дешифровка видео
- селекция движущихся целей
сопровождение целей

Дешифровка 3D-карт
- распознавание 3D-форм
Подготовка, выбор и выдача
формализованных сообщений
При обнаружении искомого объекта на мониторе оператора
выводится изображение объекта, информация о нем (тип объекта, координаты,
скорость и т.д.) и варианты действий для найденного типа объекта.
При выборе оператором одного из предложенных системой
действий автоматически генерируется формализованное сообщение.
Оператор может также сам инициировать выдачу
формализованного сообщения, указав на изображении положение и тип объекта.
Документирование
Вся поступающая информация автоматически архивируется
в виде, удобном для быстрого просмотра.
ПО комплекса также автоматически фиксирует в БД все
действия оператора и все выданные системой формализованные сообщения.
ПО комплекса может также выдавать все или любую часть
поступающей или обработанной информации на вышестоящий уровень системы
управления для ее отображения и анализа.
Наземное оборудование таких комплексов позволяет
оператору-дешифровщику производить распознавание целей и выдачу координат
найденных объектов с высокой степенью точности. Как использовать полученные
координаты, решает сам потребитель такой системы.
БЛА «Дозор-100» является развитием БЛА «Дозор-85» в
направлении увеличения продолжительности и дальности полета.
Удлинённое крыло позволило повысить летное качество
планера и, следовательно, уменьшить расход топлива в крейсерском полете. Таким
образом, продолжительность полета БЛА «Дозор-100» увеличилась до 10 часов
с большим весом полезной нагрузки.
Система выпуска выхлопных газов скрыта внутри
фюзеляжа, чем обеспечивается снижение тепловой заметности в полете и уменьшение
шума выхлопных газов.