Изложенный материал, касающийся квадратурной
формулы Гаусса также справедлив для интервала интегрирования с границами -1…1.
. Решение систем линейных уравнений
Рассмотрим систему n
линейных алгебраических уравнений с n
неизвестными:
матрицу из коэффициентов системы,
через
столбец из неизвестных, через
столбец свободных членов. Тогда
система линейных уравнений кратко может быть записана в виде матричного
уравнения 
Для нахождения корней этого
уравнения достаточно умножить обе его части слева на матрицу  , обратную
матрице
, обратную
матрице  . В
результате получим
. В
результате получим  .
.
Раскрывая это выражение, получаем известную из
курса алгебры формулу Крамера для нахождения корней системы линейных уравнений.
Однако эта формула применима в основном для ручного счета, когда число
уравнений системы не превышает четырех. При использовании этой методики для
решения систем с большим числом уравнений и с использованием компьютерной
техники точность получаемых результатов может оказаться недостаточной из-за
накопления ошибок округления при многочисленном вычислении определителей.
. Теоретические основы моделирования
металлургических процессов и объектов
Во многих практически важных случаях наряду с
изменением параметров поля (температурного, силового и т.п.) во времени
происходит их существенное изменение также в пространстве. Математическим
аппаратом для описания таких объектов, называемых объектами с распределенными
параметрами, являются дифференциальные уравнения в частных производных. Общий
вид такого уравнения следующий
 .
.
В зависимости от знака дискриминанта
D=AC-B2 получают
один из следующих типов уравнений: эллиптическое (D>0),
параболическое (D=0), гиперболическое (D<0) и смешанное [D не изменяет
знак в области, ограниченной кривой F(x,y)=0].
Уравнение эллиптического типа
(уравнение Пуассона) имеет следующий вид
 .
.
При F(x,y)=0 имеем
частный случай - уравнение Лапласа.
Уравнение параболического типа
(уравнение теплопроводности и диффузии)

описывает, в частности,
нестационарное распределение температуры вдоль тонкого однородного стержня.
Уравнение гиперболического типа
(волновое уравнение)
описывает, в частности, поперечные
колебания струны в каждом из сечений x во времени.
Применимость уравнения
соответствующего вида определяется прежде всего физическими свойствами
конкретного объекта, а также характером воздействия внешней среды (граничными
условиями). В ряде случаев такие уравнения удается получить путем аналитических
рассуждений. В качестве примера такого подхода можно взять вывод уравнения
теплопроводности. Вследствие же подобия процессов теплопередачи и диффузии,
описывающие их уравнения по виду аналогичны уравнениям теплопроводности, что
можно видеть из сравнения с уравнением диффузии
 ,
,
где С - концентрация вещества;
D -
коэффициент диффузии;
fс - плотность
источников вещества, например, количество вещества,
образующегося в результате химических реакций в
единице объема в единицу времени.
Уравнение относится к молекулярному переносу в
неподвижной среде и справедливо для изотермического процесса и случая, когда
диффузия данного компонента не зависит от диффузии других компонентов. В этих
условиях зависимость коэффициента диффузии от температуры T,
вязкости среды h и радиуса диффундирующих молекул r
определяется формулой Стокса-Эйнштейна
 ,
,
где R и N0 - газовая
постоянная и число Авогадро.
Между количеством тепла q,
поступающим в систему, работой и изменением внутренней энергии существует
соотношение
 ,
,
или для бесконечно малых приращений
 .
.
Эти соотношения и являются
выражением первого закона термодинамики, который гласит, что количество тепла,
полученное системой, равно увеличению ее внутренней энергии и произведенной ею
работы.
При изобарическом процессе (p=const), учитывая,
что  , из первого
закона термодинамики получаем
, из первого
закона термодинамики получаем
 .
.
Таким образом, придаваемое системе
тепло расходуется на приращение функции U+pV, которая
называется энтальпией и определяется тождеством

. Численное решение краевых задач
математической физики методом конечных разностей
Рассмотрение способов построения и
основных свойств разностных схем начнем с задачи теплопроводности, возникающей
при расчете симметричного нагрева бесконечной пластины толщиной 2d. Используя свойство
симметрии температурного поля, поместим начало координат y=0 в точку,
лежащую в средней плоскости пластины, и выберем в качестве расчетной области G интервал 0<y<d, соответствующий половине толщины
пластины. Тогда уравнение теплопроводности, описывающее нагрев пластины,
принимает вид
 , 0<y<d.
, 0<y<d.
Предполагая, что в начальный момент
времени тело является равномерно прогретым до температуры qн, запишем
начальное условие
 , 0<y<d.
, 0<y<d.
Граничное условие при y=0 является
следствием симметрии температурного поля
 .
.
На поверхности пластины будем
считать заданным линейное граничное условие III рода,
соответствующее постоянной температуре окружающей среды q0 и
постоянному, не зависящему от температуры, коэффициенту теплопередачи a
 .
.
Рассмотрим сначала применение метода
конечных разностей для решения линейной задачи теплопроводности, предполагая,
что теплофизические характеристики тела с, r
и l не зависят
от температуры.
Рисунок 1
В этом случае уравнение
теплопроводности упрощается и принимает следующий вид
 , 0<y<d,
, 0<y<d,
где a=l/сr - коэффициент
температуропроводности.
Выбор этого наиболее простого
примера объясняется только тем, что наличие точного аналитического решения
позволяет произвести прямую оценку погрешности приближенных численных методов.
Вместе с тем, на этом примере можно наглядно продемонстрировать некоторые
специфические проблемы, возникающие при реализации метода конечных разностей, и
сделать выводы, имеющие общий характер.
Построение разностных схем. Основная
идея метода конечных разностей (метода сеток) заключается в том, что
непрерывная область изменения пространственной переменной 0£y£d заменяется
конечной совокупностью дискретно расположенных узловых точек y1, y2, …, yn, yn+1. При
равномерном расположении этих точек на отрезке [0, d] их координаты равны yi=(i-1)Dy при i=1, …, n+1, где
расстояние между соседними точками (шаг по координате) Dy=d/n.
Аналогичным образом, вместо непрерывного изменения температурного поля во
времени, рассматриваются значения температуры в фиксированные моменты времени tk=kDt, k=1, 2, …,
где Dt - интервал
между двумя последовательными моментами времени (шаг по времени).
В плоскости (y, t)
совокупность узловых точек с координатами (yi, tk) образует
прямоугольную сетку, изображенную на рис., и расчет температурного поля q(y, t) сводится к
отысканию сеточной функции  , приближенно характеризующей
температуру тела в узловых точках. Для иллюстрации на следующем рис. изображены
дискретные температурные поля и
, приближенно характеризующей
температуру тела в узловых точках. Для иллюстрации на следующем рис. изображены
дискретные температурные поля и  , соответствующие двум моментам
времени tk и tk+1.
, соответствующие двум моментам
времени tk и tk+1.
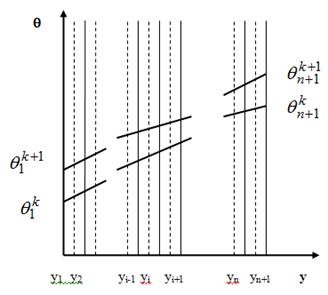
Рисунок 2
При замене непрерывной функции q(y, t) дискретной
сеточной функцией необходимо
заменить дифференциальное уравнение теплопроводности с соответствующими
краевыми условиями системой алгебраических (разностных) уравнений, связывающих
значения сеточной функции в соседних узловых точках. Такая система
алгебраических уравнений, являющаяся приближенной математической моделью
процесса теплопроводности, называется разностной схемой решения исходной
краевой задачи. Как будет показано в дальнейшем, переход от исходных
дифференциальных соотношений к соответствующей им системе разностных уравнений
может быть произведен различными путями. Получающиеся при этом разностные схемы
могут значительно отличаться друг от друга в отношении точности и
эффективности, т.е. объема вычислений, который необходимо произвести для
достижения заданной точности расчета. Некоторые разностные схемы вообще
оказываются непригодными для получения удовлетворительного результата. Таким
образом, в каждом конкретном случае возникает проблема выбора разностной схемы,
наилучшим образом отвечающей исходной постановке задачи.
Разностная схема, конечно, должна
быть построена таким образом, чтобы измельчение сетки сопровождалось
уменьшением погрешности численного решения задачи. Для того, чтобы выразить это
требование более строго, введем количественную характеристику погрешности
расчета  , выразив ее
в каждой точке в виде разности между значением сеточной функции и точным
значением температуры q(yi, tk)
, выразив ее
в каждой точке в виде разности между значением сеточной функции и точным
значением температуры q(yi, tk)
 .
.
Погрешность расчета температуры в k-тый момент
времени ek естественно
определить как максимальное значение
 ,
,
а общую погрешность e, характеризующую качество
всего численного решения задачи, как
 .
.
Подчеркивая зависимость погрешности
расчета от величины шагов по координате и времени, запишем e=e(Dy, Dt). Тогда для
правильно построенной разностной схемы должно выполняться предельное
соотношение

 .
.
7. Проекционные методы решения краевых задач
математической физики
Используя основные понятия функционального
анализа, можно сформулировать постановку краевой задачи следующим образом.
Даны метрические пространства X
и Y и оператор А,
определенный на множества DА
пространства X с множеством
значений пространства Y.
Требуется решить уравнение Аx=y*,
где y*
- заданный элемент Y.
Множество X
называется метрическим пространством, если каждой паре его элементов x1
и x2
поставлено в соответствие неотрицательное вещественное число ρ(x1,
x2),
называемое расстоянием между x1
и x2
и удовлетворяющее следующим условиям:
1) ρ(x1,
x2)=0
тогда и только тогда, когда x1=x2;
2) ρ(x1,
x2)=
ρ(x2,
x1);
) для любых трех элементов x1,
x2
и x3
ρ(x1,
x2)≤
ρ(x1,
x3)+
ρ(x3,
x2).
Для нахождения приближенного решения краевой
задачи разрабатывается алгоритм, который выдает последовательность приближенных
решений xn.
Приближенное решение краевых задач во многих
случаях удается получить с применением так называемых прямых методов. По
определению прямыми называются такие методы приближенного решения задач теории
дифференциальных и интегральных уравнений, которые сводят эти задачи к конечным
системам алгебраических уравнений.
К прямым методам приближенного решения краевых
задач относятся проекционные методы.
Пусть φ1,
φ2, …, φn,
… есть некоторая полная линейно независимая система элементов DА.
Назовем ее координатной системой, а ее элементы - координатными функциями.
Если в пространстве DА
любая последовательность является фундаментальной, то это пространство
называется полным. Последовательность элементов метрического пространства
называется сходящейся в себе или фундаментальной последовательностью если для
любого числа ε>0 найдется такое
число Nε,
что ρ(xn,xm)<ε
при
n,m≥Nε.
Если S
- непустое множество элементов метрического пространства, то каждое выражение
вида a1j1+a2j2+…+anjn,
где a1,
a2,
…,an
действительные числа, а a1,
a2,
…,anÎS
называется линейной комбинацией. Множество всех линейных комбинаций элементов
из S образует векторное
пространство.
Непустое множество S={
φ1, φ2,
…, φn}
попарно различных векторов линейно зависимо, если существуют действительные
числа a1,
a2,
…,an,
не все равные нулю, такие, что
a1j1+a2j2+…+anjn=0.
Если, напротив, это соотношение имеет место
только при a1= a2=
…=an,=0,
то S линейно
независимо. Вектор x является
линейно зависимым от S,
когда он является линейной комбинацией векторов из S,
т.е. если xΣ(S).В
случае, если xÏ£(S),
то вектор называется линейно независимым от S.
Будем искать приближенное решение в виде
 .
.
Такой метод решения краевых задач
будем называть проекционным.
Элемент xn входит в
область определения оператора А, т.е. при любом натуральном n и любых
коэффициентах ai (1£i£n) xn принадлежит
DA. Критерии,
которыми руководствуются при выборе коэффициентов ai, могут быть
различными. Поэтому мы имеем дело с различными модификациями проекционного
метода.
Многие из этих модификаций являются
частными случаями метода моментов или средневзвешенных невязок.
. Метод конечных элементов
Метод конечных элементов (МКЭ)
завоевал широкое признание как эффективный метод решения краевых задач
математической физики.
В основе метода конечных элементов
лежит идея замены непрерывной функции ее дискретной моделью. При этом: 1) в
области определения Ω
фиксируется
конечное число точек - глобальных узлов; 2) область Ω приближенно
представляется в виде совокупности конечного числа непересекающихся подобластей
- конечных элементов, связанных между собой определенным образом в глобальных
узлах на их границах; 3) рассматриваемую функцию локально аппроксимируют на
каждом конечном элементе непрерывными функциями, однозначно определяемыми
значениями функции в глобальных узлах, принадлежащих этому элементу.
Процесс дискретизации области
включает: а) разбиение области на конечные элементы; б) нумерацию элементов и
узлов.
Разбиение области на элементы
сводится к заданию числа, размеров и формы непересекающихся подобластей. При
этом используют элементы трех основных типов:
1) одномерные элементы;
2) двумерные элементы (для дискретизации
двумерных областей обычно используют два основных семейства элементов -
треугольники и четырехугольники);
) трехмерные элементы (при дискретизации
трехмерных областей наиболее часто используют тетраэдр и параллелепипед).
Следует отметить, что наибольшее практическое
применение получили симплекс-элементы, к которым относятся линейный одномерный
элемент с двумя узлами, линейный треугольник с тремя узлами и линейный тетраэдр
с четырьмя узлами. Симплексом в k-мерном
пространстве называется выпуклое множество S,
определяемое совокупностью k+1
вершин (узлов), не лежащих в одной (k-1)-мерной
гиперплоскости. К достоинствам этих элементов следует отнести простоту в
теоретическом отношении, возможность аппроксимации границ сложной формы,
наличие программ для ЭВМ, позволяющих производить дискретизацию области.
Размеры отдельных элементов могут варьироваться
- в областях с высоким градиентом напряжений, температур и т.д. Разбиение в
этих областях обычно выбирается мелким, что существенно повышает точность
расчетов. Возможность такого варьирования - важное достоинство метода конечных
элементов.
При дискретизации области с применением
симплекс-элементов необходимо стремиться, чтобы треугольник приближался по
форме к равносторонним треугольникам, а тетраэдры - к правильным тетраэдрам.
Такое разбиение приводит к более точным результатам.
Проводя нумерацию узлов, следует учитывать, что
матрица коэффициентов системы линейных уравнений, к определению корней которой
сводится решение краевой задачи (в методе конечных элементов такая матрица
называется матрицей жесткости) имеет ленточную структуру. Матрица называется
ленточной, если все ненулевые элементы и некоторые нулевые находятся между
двумя линиями, параллельными главной диагонали, т.е. aik=0
для всех i, k
таких, что \i-k\>m,
где m<<n.
Шириной ленты называется число 2m+1.
Все компоненты матрицы вне этой полосы равны нулю.
Поставим задачу: представить интерполяционный
полином в виде
 ,
,
где Φi, Φj, Φk - узловые
значения скалярной величины φ, а Ni, Nj, Nk - так
называемые «функции формы». Они также представляют собой линейные полиномы вида
 ,
,
однако коэффициенты полиномов
подобраны так, чтобы обеспечить выполнение следующего фундаментального
требования:
Ni=1 в узле i и нулю в
узлах j и k;
Nj=1 в узле j и нулю в
узлах i и k;
Nk=1 в узле k и нулю в
узлах i и j.
Кроме того, в каждой внутренней
точке элемента сумма значений функций формы равна единице.
Условия в узлах элемента запишутся
следующим образом:
φ=Φi при x=Xi, y=Yi;
φ=Φj при x=Xj, y=Yj;
φ=Φk при x=Xk, y=Yk.
Подставляя эти условия в (6.1),
получаем систему уравнений

Решая эту систему, получаем
 и
и 
 и
и 
 и
и 
Отметим основные свойства
рассматриваемого элемента: а) градиенты скалярной величины φ по
направлению осей x и y постоянны;
б) функция φ
линейно
изменяется между двумя любыми узлами; в) любая линия, вдоль которой φ принимает
постоянные значения, есть прямая, пересекающая две стороны элемента; г) функция
φ
непрерывна
вдоль общей границы двух элементов; д) сумма значений функций формы в каждой
внутренней точке элемента равна единице.
Интерполяционный полином для
тетраэдра имеет вид:

Для нахождения коэффициентов
используем условия в узлах:
9. Постановка и пути решения
оптимизационных задач
Основное предназначение
математических моделей состоит в том, чтобы помочь специалисту избрать такое
воздействие (управление), которое обеспечило бы получение более высокой
производительности, минимальных затрат, лучших качественных показателей
выпускаемой продукции и т.п., т.е. оптимизировало бы его.
Теория оптимального управления
охватывает широчайший круг задач из различных областей человеческой
деятельности. Металлургии также присуще многообразие задач теории оптимального
управления.
Поиск оптимума - это поиск условий,
обеспечивающих минимум или максимум какого-то показателя. Применительно к
промышленному производству и, в частности, к технологическим процессам - это
нахождение и реализация оптимальных параметров машин и агрегатов, оптимальных
режимных параметров - скорости, усилия, температуры и т.д.
Задача решается легко, если
показатель φ,
который
называют целевой функцией, представляется математически зависимым от нескольких
переменных x1, x2, …, xn, по которым
φ
дифференцируема
и которыми инженер может управлять, а область определения этих переменных
неограниченна. В этом случае пользуются, например, необходимым условием
экстремума для определения оптимального набора параметров x10, x20, …, xn0 решают
систему конечных уравнений

Когда подобная система содержит
большое число уравнений, то поиск оптимума эффективней вести прямой минимизации
функции φ(x1, x2, …, xn).
Подобный класс задач известен и не
будет рассматриваться, хотя на практике при оптимизации технологии они могут
повстречаться.
Ситуация существенно усложняется,
когда область определения параметров управления x1, x2, …, xn ограничена.
Кроме того в задачах оптимального управления интересуются максимумом или
минимумом целевой функции вне зависимости от того гладкая (дифференцируемая)
она или нет. Для определения x10, x20, …, xn0
обеспечивающих максимум или минимум φ в этом случае не подходит
необходимое условие экстремума.
Обратимся к основной задаче
математического программирования - отысканию точки x0 выпуклого
множества X, в которой
выпуклая функция φ(x),определенная
на X, достигает
минимального значения

Множество X n-мерного
евклидова пространства называют выпуклым, если вместе с любыми двумя точками x(1) и x(2) ему
принадлежит и соединяющий их отрезок.
Функцию φ(x),
определенную на выпуклом множестве X, называют
выпуклой, если для любых x(1), x(2) и всех α, изменяющихся
от 0 до 1, выполняется неравенство

Укажем несколько свойств оптимальных
решений, которые предстоит найти.
). Если выпуклы функция φ(x) и
множество X, то любая
точка x0,
принадлежащая X, являющаяся
точкой локального минимума, будет оптимальной точкой для задачи оптимизации
функции φ(x) на множестве
X (точкой
глобального минимума).
). Если выпуклы функция φ(x) и
множество X, то
множество оптимальных точек выпукло.
). Если φ(x) строго
выпукла на выпуклом множестве X и точка x0
принадлежащая X оптимальна,
т.е.
то для всех x,
принадлежащих X и неравных x0 будет φ(x)> φ(x0) и, значит,
точка x0
единственна.
В конечном счете, каждая задача
линейного программирования может быть приведена к следующему виду:
Основная задача линейного
программирования
Пусть заданы два конечных множества M и N, векторы b[M] и c[N], матрица A[M,N]. Пусть
заданы также разбиения M=M1+M2 и N=N1+N2. Требуется
найти вектор x[N], удовлетворяющий
условиям
X[N1]≥0[N1],
a[M1,N]×x[N]≥b[M1],[M2,N]×x[N]=b[M2][N]×x[N].
Случай, когда M=M2 и N=N1, нас будет
интересовать особо. Такая задача будет называться стандартной задачей линейного
программирования.
Динамическое программирование
рассматривает движение систем и его оптимизацию. Система в динамическом
программировании представляется аналитически как вектор состояния x, вектор
управления u и заданное
правило преобразования T вектора состояния x в процессе
движения.
Пусть вектор состояния в исходный
момент x(0). Применив
некоторое управление u(0), по x(0) и u(0) с помощью
заданного преобразования T (допустим оно дано в виде функции)
можно получить вектор x(1)=T(x(0), u(0)). Избрав
некоторый вектор управления u(1), по x(1) и u(1) можно
подсчитать вектор x(2)=T(x(1), u(1))=T[T(x(0), u(0)), u(1)] и т.д.
Таким образом, можно получить для принятых x(0) и
управлений u(0, u(1), …, u(n), …
дискретное множество векторов x(1), x(2), …, x(n), …, которое
называют многошаговым процессом. Если число шагов ограничено, то процесс
называют N-шаговым.
Векторы управления u выбирают из множества допустимых
управлений Wu,
обусловленного некоторыми ограничениями. Вектор состояния x также имеет
свои ограничения и xÎWx. Итак,
удовлетворяя ограничениям uÎWu и xÎWx, можно указать
некоторый N-шаговый
процесс
Динамическое программирование
предполагает, что преобразование T обладает единственностью, т.е.
избрание некоторого x(0) и
конкретных управлений u(0), u(1), …, u(N-1) определяет
единственным образом N-шаговый процесс -
последовательность векторов x(0), x(1), x(2), …, x(n), …, x(N),
подсчитанных по выше приведенным формулам. Одним из главных положений, на
котором основывается динамическое программирование и которое вытекает из
единственности преобразования T, является независимость
последующего движения от предистории, например, движение системы, начиная с
вектора состояния x(n) до вектора x(N), не зависит
от истории, которая привела систему в состояние, характеризуемое вектором x(n-1).
Основы теории оптимального
управления. Пусть функционирование объектов во времени описывается системой
дифференциальных уравнений

где искомые функции xi=xi(t)
характеризуют состояние объекта в каждый момент времени t;
fi - заданные
функции указанных аргументов;
u1=u1(t), …, ur=ur(t) - функции,
называемые управлением.
Принято функционирование или работу
объекта в соответствии с дифференциальными уравнениями называть движением
системы, несмотря на то, что они могут описывать и немеханическое движение.
Если уравнения линейные, то говорят о движении линейных систем.
Полагают, что рассматривается
движение некоторой системы на отрезке времени tα≤t≤tβ при
заданных начальных условиях
 .
.
В векторной форме уравнения и
начальные условия могут быть записаны в виде

Уравнения и начальные условия - это
математическая модель реально существующего движения. В связи с этим будем
требовать, чтобы выбор управления u=u(t)
осуществлялся из таких соображений, чтобы подстановка его в систему делала ее
разрешимой, причем единственным образом, с помощью начальных условий. Вектор
функцию u=u(t) называют
возможным управлением, если подстановка u=u(t) в
дифференциальное уравнение движения делает его на отрезке времени tα≤t≤tβ разрешимым,
причем единственным образом, с помощью начального условия Возможными
управлениями будут дифференцируемые функции, непрерывные функции,
кусочно-непрерывные функции.
Задание начальных условий  и выбор
определенного возможного управления u=u(t) определяют
единственным образом непрерывное движение x=x(t), при этом
вектор x называют
фазовым вектором; компоненты xi (i=1…n) называют
фазовыми координатами; линию с параметрическими уравнениями x1=x1(t), …, xn=xn(t),
представляющую в фазовом пространстве движение системы, называют фазовой
траекторией.
и выбор
определенного возможного управления u=u(t) определяют
единственным образом непрерывное движение x=x(t), при этом
вектор x называют
фазовым вектором; компоненты xi (i=1…n) называют
фазовыми координатами; линию с параметрическими уравнениями x1=x1(t), …, xn=xn(t),
представляющую в фазовом пространстве движение системы, называют фазовой
траекторией.
Фазовым пространством называют
совокупность всех фазовых векторов.
Исследуем частный класс задач:
управление системами, движение которых описывается линейными дифференциальными
уравнениями
 ,
,
где aik, bij -
постоянные величины или функции времени t, которые
непрерывны и известны.
Если же строчными буквами обозначить
матрицы-столбцы, прописными - прямоугольные матрицы, то система принимает вид
 .
.
Система линейных дифференциальных
уравнений имеет аналитическое решение, определяемое формулой Коши
 ,
,
где x(t) - фазовый
вектор в произвольный момент времени, удовлетворяющий начальному условию x(ta)=xa; X(t,ta), или X(t,t) - фундаментальная матрица,
которую вычисляют следующим образом.
На базе системы линейных
дифференциальных неоднородных уравнений составляют систему однородных уравнений
 .
.
Решая ее, выделяют n линейно
независимых векторов-решений. Считая, что каждый из линейно независимых
векторов z(k)(t) являющихся
решениями этой системы, есть вектор столбец, составляют матрицу
 .
.
Фундаментальную матрицу описывают
формулой
 .
.
Рассмотрим простейшую задачу о
быстродействии, имеющую большое практическое значение.
Дана некоторая система
(механическая, электромеханическая и т.п.), движение которой описывается
линейным дифференциальным уравнением
 .
.
Дано множество допустимых управлений
Ωu, которыми
располагает система. Дано положение системы в начале движения

 ,
,
но момент окончания движения t=tβ неизвестен.
Задача состоит в том, чтобы выбрать из множества допустимых управлений Ωu такое u0=u0(t), при
котором система в кротчайшее время T0=min(tβ-tα) перешла бы
из состояния в состояние
.
Для решения сформулированной задачи
обратимся к понятию области достижимости G. Пусть в
некоторый фиксированный момент времени t*<tβ процесс еще
не завершился, система не достигла заданного состояния, точка xβ фазового
пространства лежит еще вне области достижимости. Если следовать естественному
ходу времени, то область достижимости будет смещаться по фазовому пространству
и изменять свою форму. В некоторый момент времени t=tβ наступит
такое положение, что область достижимости коснется заданной точки xβ. Момент
касания областью достижимости точки xβ даст
искомое наименьшее время T0=min(tβ-tα) перехода
системы из положения xα в положение
xβ. Следует
заметить, что касание областью достижимости заданной точки xβ может
наступить еще раз - в момент покидания областью достижимости точки xβ.
Возникающая при этом неоднозначность решения легко устраняется выбором меньшего
отрезка T=tβ-tα, который
будет решением задачи.
Рассмотрим область достижимости в
фиксированный, но пока не известный момент времени t=tβ. Обозначим
через x(tβ) значение
фазового вектора в области достижимости, подсчитанное по формуле Коши в момент
времени t=tβ для
некоторого допустимого управления u. Множество
значений фазового вектора на границе области достижимости обозначим  . В каждую
точку границы система приходит с помощью своего управления. Из множества точек надо
выбрать ту (и соответствующее ей управление), для которой = xβ.
Управление, обеспечивающее попадание системы в эту точку, будет искомым
оптимальным управлением u0=u0(t).
. В каждую
точку границы система приходит с помощью своего управления. Из множества точек надо
выбрать ту (и соответствующее ей управление), для которой = xβ.
Управление, обеспечивающее попадание системы в эту точку, будет искомым
оптимальным управлением u0=u0(t).
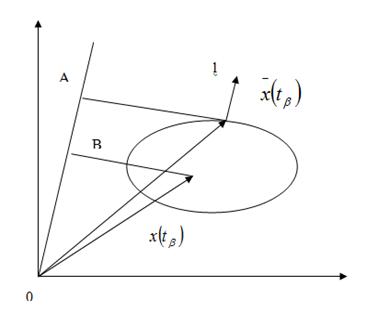
Рисунок 3
Возьмем произвольный вектор l единичной
длины перпендикулярный границе области достижимости. Из рисунка видно, что если
перебрать все точки x(tβ),
принадлежащие области достижимости в момент времени tβ то проекции
их фазовых векторов на направление вектора l не будут
превышать длину отрезка ОА. Отрезок ОА будет отвечать условию
 .
.
Из этого условия, которое является
принципом максимума, можно найти точки , лежащие на границе области
достижимости. Если перебрать все l, то получим с помощью принципа
максимума все граничные точки области достижимости.
С учетом формулы Коши условие
максимума можно написать в виде
Так как вектор l задан, а
первое слагаемое в формуле Коши постоянно, то максимизацию осуществляют лишь по
второму слагаемому скалярного произведения, причем переменным для него уже
будет управление. Итак получаем принцип максимума, который состоит в следующем:
оптимальное управление uo=uo(t) на отрезке
времени [ta, tβ] в любой
момент времени tÎ[ta, tβ]
определяется из условия
 ,
,
где u - значение
функции u(t) в
фиксированный момент tÎ[ta, tβ].
Принцип максимума является
необходимым условием оптимальности, так как он «выводит» точку окончания
процесса в области достижимости G|t= tβ на ее
границу, а на границе обязательно лежит xβ - решение
задачи оптимизации по быстродействию.
Рассмотрим вторую задачу оптимизации
процесса управления движением. Движение некоторой системы описывают
дифференциальным уравнением
 .
.
Движение управляется из множества
допустимых управлений. Дано положение системы в начале движения
.
Дан отрезок времени управляемого
движения [tα, tβ]. Дано
положение системы, в которое ее следует перевести к моменту времени tβ - xβ. Но система
по каким-либо причинам в точности не может достичь xβ, то есть x(tβ)≠xβ. Задача
состоит в том, чтобы выбрать такое управление  , при котором система наилучшим
образом приближается к заданной цели, то есть будет достигнут min ||x(tβ)-xβ||.
Изменением системы отсчета в фазовом пространстве всегда можно сделать так,
чтобы xβ=(x1β, …, xnβ)т=(0,
…, 0)т=0.
, при котором система наилучшим
образом приближается к заданной цели, то есть будет достигнут min ||x(tβ)-xβ||.
Изменением системы отсчета в фазовом пространстве всегда можно сделать так,
чтобы xβ=(x1β, …, xnβ)т=(0,
…, 0)т=0.
Рассмотрим задачу оптимального
управления процессом нагрева металла в камерной печи. Задача - за отведенный
заданный промежуток времени T=tβ-tα обеспечить
наилучший нагрев: температура по телу металлической заготовки должна в
результате нагрева максимально приблизиться к заданной по технологии
температуре. Мощность нагревательных устройств может в процессе нагрева
регулироваться, однако она ограничена.
Пусть тепловая мощность печи W ограничена Wmax, т.е. 0≤W≤Wmax. последнее
в безразмерном виде записывается так:
 ,
,
где u=W/Wmax -
управление.
Согласно закону сохранения тепловой
энергии мощность будет расходоваться на нагрев металла, находящегося в печи, на
тепловые потери в атмосферу цеха через стенки печи и на повышение ее температуры.
Это можно записать в виде
 ,
,
где с1, с2 и c3 - известные
размерные коэффициенты. Последнее уравнение в безразмерном виде (если принять θ/θс=x) таково:
где a0, a1, b1, f1 - известные
коэффициенты.
Нагрев металла описывается
дифференциальным уравнением теплопроводности. Если ограничиться случаем нагрева
пластины, то уравнение имеет вид
 .
.
Разделим мысленно пластину на слои.
Если i - номер
произвольного узла, то производные в этом узле можно аппроксимировать в виде
 ;
;
 .
.
Уравнение теплопроводности, будучи
записанным с учетом этих формул для отдельных узлов с номерами i=1, 2, …, n, n+1, может
быть представлено системой обыкновенных дифференциальных уравнений

математический
моделирование задача физика
В систему формальным образом вошли
лишние неизвестные θ0 и θn+2. Исключим
их из граничных условий. Так, из-за симметрии пластины ∂θn+1/∂z=0, тогда из
первой формулы следует: θn+2=θn. Тепловой
поток в нагреваемый металл соответствует граничным условиям третьего рода
 .
.
Имея в виду первую формулу,
последнее условие можно представить в виде
 .
.
Приведем систему к безразмерному
виду, поделив ее на известную θс=const. Если
учесть последнюю формулу и θn+2=θn, то она
запишется в виде

Литература
1. Васильев С.Н, Матросов В.М.,
Москаленко А.И. Нелинейная теория управления и ее приложения. - М.:ФМЛ, 2008. -
320 с.
. Веников В.А., Веников Г.В.
Теория подобия и моделирования. - М.: Высшая школа, 1984.
. Вентцель Е.С. Исследование
операций. Задачи, принципы, методология - М.: Высшая школа, 2007.
. Глухов В.В., Медников М.Д.,
Коробко С.Б. Математические методы и модели для менеджмента. Учебник. - СПб.:
Лань, 2007.
. Краснощеков П.С., Петров
А.А. Принципы построения моделей. - М.: Фазис, 2007.
. Пелих А.С., Терехов Л.Л.,.
Терехова Л.А Экономико-математические методы и модели управления производством.
- Ростов-на-Дону. Феникс. 2009
. Первозванский А.А.
Математические модели в управлении производством. 2007.
. Самарский А.А., Михайлов
А.П. Математическое моделирование: Идеи, методы, примеры. - М.: Физматлит,
2008.
. Таран Т.А. Логические
методы и модели поддержки принятия решений в конфликтных ситуациях.
Переславль-Залесский. 2007.
. Трояновский В.М. Математическое
моделирование в менеджменте. Учебное пособие. - М.: Русская Деловая Литература,
2007.
. Шебеко Ю.А. Имитационное
моделирование и ситуационный анализ бизнес-процессов принятия управленческих
решений. - М.: Изд-во МАИ, 2007.
. Шикин Е.В., Чхартишвили А.Г.
Математические методы и модели в управлении - М.: Дело 2009.