Тяговый расчет автомобиля
Введение
Наше время характеризуется стремительным
развитием научно-технической революции. Этот процесс, имея глобальные масштабы,
сопровождается интенсивным ростом средств связи и транспорта.
Среди прочих видов транспортных средств
автомобиль занимает особое и, безусловно, ведущее место. Отличаясь высокими
скоростями, хорошей динамикой, комфортабельностью, проходимостью и
технологичностью в условиях массового производства, автомобиль за несколько
десятилетий стал наиболее распространенным видом транспорта.
Структура тормозного управления автомобиля и
требования, предъявляемые к нему обусловлены ГОСТ-22895-95г. Согласно этому
эталону тормозное управление обязано состоять из четырех систем: рабочей,
запасной, стояночной и вспомогательной. Системы могут иметь общие элементы, но
не менее двух независящих органов управления. Любая из этих систем включает в
себя тормозные механизмы, обеспечивающие создание сопротивления движению кара и
тормозной привод, нужный для управления тормозными механизмами.
Рабочая тормозная система должна плавно
действовать на все колеса автомобиля, рационально распределять тормозной момент
между мостами и обеспечивать высокую эффективность торможения для трех тепловых
режимов тормозных режимов: холодного, нагретому по специальному циклу, нагретому
притормаживанием при движении на затяжном спуске.
Запасная тормозная система должна обеспечивать
остановку автомобиля в случаи выхода из строя рабочей тормозной системы при
условии, что в ней не более одного отказа. Запасной тормозной системой может
быть как специальная автономная система, так и контуры рабочей или стояночной.
Орган управления может быть независимым или общим с рабочей или стояночной
тормозной системой.
Стояночная тормозная система обеспечивает
неподвижность автомобиля на уклоне даже при отсутствия водителя. Её управление
должно быть с рабочего места водителя, а орган управления и привод -
независимым от рабочей тормозной системы. Эффективность стояночной тормозной
силы выбирается такой, чтобы суммарная тормозная сила не менее 24 % полной
массы автомобиля. Испытание проводиться на уклоне не менее 25% при направлении
автомобиля вверх или вниз по уклону с отсоединением двигателя от трансмиссии.
Требования к тормозным системам следующие:
. наибольший тормозной путь наибольшее установившееся
замедление в согласовании с требованиями ГОСТ 22895-95 г., Для пассажирских
каров и грузовых каров в зависимости от типа испытаний.
. Сохранение стойкости при торможении
(критериями стойкости служат: линейное отклонение, угловое отклонение, угол
складывания автопоезда.)
. Стабильность тормозных параметров при
неоднократном торможении.
. малое время срабатывания тормозного привода.
. Силовое следящее действие тормозного привода,
то есть пропорциональность меж усилием на педаль и приводным моментом.
. Малая работа управления тормозными системами -
усилие на тормозные педали в зависимости от назначения автотранспортного
средства обязано быть в пределах 500….7ОО Н, ход тормозной педали 80…180мм.
. Надежность всех частей тормозных систем.
Цель данного курсового проекта - расчет
тормозной системы переднеприводного автомобиля 2 класса.
1. Технико-экономическое обоснование
проекта
1.1. Назначение и требования, предъявляемые к
тормозным системам
Тормозная система служит для снижения скорости
движения и быстрой остановки автомобиля, а также для удержания его на месте при
стоянке. Наличие надежных тормозов позволяет увеличить среднюю скорость
движения, а следовательно, эффективность эксплуатации автомобиля.
Основные требования к тормозному управлению
автомобилей можно сформулировать следующим образом:
1 тормозное
управление должно в любой момент времени обеспечить максимально возможную в
данных условиях эффективность торможения, то есть остановить автомобиль с
минимальным тормозным путем;
2 тормозное
управление должно работать таким образом, чтобы при торможении оно не явилось
бы причиной потери автотранспортным средством устойчивости движения;
3 тормозное
управление должно иметь повышенную надежность, даже при отказе какого-либо его
элемента должно обеспечиваться торможение автотранспортного средства с
достаточной эффективностью.
Автотранспортные средства в обязательном порядке
должны иметь тормозное управление, состоящее, как минимум, из рабочей, запасной
и стояночной тормозных систем.
1.1.1 Требования к рабочим
тормозным системам
Основное требование
предъявляемое к рабочей тормозной системе, обеспечение регулирования скорости
автомобиля с заданной эффективностью в заданных пределах вне зависимости от
величины этой скорости, нагрузки автомобиля, уклонов дороги и прочих условий
эксплуатации, для которых автомобиль предназначен.
Рабочая тормозная система
должна действовать на все колеса автотранспортного средства, её действие должно
быть плавным, а распределение этого действия по осям автомобиля - рациональным.
Привод рабочей тормозной
системы должен иметь не менее двух контуров. Каждый контур рабочих тормозов
должен при отказе остальных контуров обеспечивать торможение с эффективностью,
не меньшей 30% нормы.
В целях безопасности каждый
контур рабочей тормозной системы должен иметь автономный аккумулятор энергии.
Отказ какого - либо контура не должен мешать источнику снабжать энергией
неповрежденные контуры.
Режимы предварительного этапа при испытаниях Тип
1
|
Подкатегория
автомобилей
|
Начальная
скорость, V0, км/ч
|
Конечная
скорость, Vк, км/ч
|
Установившееся
замедление, jуст, м/с2
|
Длительность
цикла, τц, с
|
Число
торможений
|
|
М1
|
0,8
Vmax, но не более 120
|
0,5
V0
|
3,0
|
45
|
15
|
Нормы эффективности рабочей тормозной системы
автомобилей
|
Подкатегории
автомобиля
|
Начальная
скорость торможения, км/ч
|
Усилие
на педали, Н, (не более)
|
Вид
испытаний
|
Тормозной
путь, м, (не более)
|
Установившееся
замедление, м/с2, (не менее)
|
|
М1
|
80
|
500
|
Тип
0 Тип 1 Тип 2
|
43,2
54,0 57,5
|
7,0
5,4 5,0
|
1.1.2 Требования к запасным тормозным системам
Запасная тормозная система должна быть такой,
чтобы предписанная ей эффективность действия обеспечилась при любом отказе в
тормозном управлении, не связанном с чрезвычайным отказом элемента
гарантированной прочности. Действие запасной тормозной системы должно быть плавным.
Запасной тормозной системой может быть как
специальная автономная система так и контуры рабочих тормозов или стояночная
тормозная система. Водитель должен иметь возможность управлять запасной
системой со своего рабочего места, контролируя хотя бы одной рукой рулевое
управление. Если у рабочей и запасной тормозных систем разные органы
управления, то их одновременное привидение в действие не должно ухудшать
тормозные свойства автомобиля.
Нормы эффективности запасной тормозной системы:
|
Подкатегории
автомобиля
|
Начальная
скорость торможения, км/ч
|
Усилие
на органе управления, Н, (не более)
|
Тормозной
путь, м, (не более)
|
Установившееся
замедление, м/с2, (не менее)
|
|
|
Ручной
|
Ножной
|
|
|
|
М1
|
80
|
400
|
500
|
90,1
|
3,0
|
1.1.3 Требования к стояночным и вспомогательным
тормозным системам
Основным требованием является надежность: она
должна вне зависимости от присутствия водителя обеспечивать автотранспортному
средству неподвижность на подъеме и спуске. Её управление должно быть с
рабочего места водителя, а орган управления и привод - независимым от рабочей
тормозной системы. Эффективность стояночной тормозной силы выбирается такой,
чтобы суммарная тормозная сила не менее 24 % полной массы автомобиля. Испытание
проводиться на уклоне не менее 25% при направлении автомобиля вверх или вниз по
уклону с отсоединением двигателя от трансмиссии.
Стояночная тормозная система не может обойтись
без аккумулятора энергии, причем расхода энергии в процессе стояночного
торможения быть не должно. Воздух и тормозная жидкость для этих целей не
годятся, поскольку велика вероятность утечки. Поэтому постоянной усилие должно
осуществляется исключительно за счет упругой деформации какого либо твердого
тела, например, тросов и тяг. Специфика стояночной тормозной системы требует,
чтобы ее орган управления и передаточный механизм привода были независимы от
рабочей тормозной системы. Часто стояночный тормоз выполняет функции запасного.
В этом случае его конструкция должна обеспечивать плавное и быстрое торможение
автомобиля, едущего на большой скорости.
1.1.4 Требования к тормозным механизмам
Исполнительными органами автомобильных тормозных
систем являются тормозные механизмы - устройства, в которых входное воздействие
преобразуется в тормозной момент, приложенный к колесу и создающие искусственное
сопротивление его вращению. Тормозные механизмы при торможении поглощают
огромную энергию движущегося транспортного средства
Современный автомобильный тормозной механизм
представляет собой фрикционное устройство, в котором искусственное сопротивление
движению связанного с колесом вращающегося элемента создаются за счет
регулирования трения его об элементы, базирующиеся на шасси автомобиля и
входящие в статор тормоза.
К фрикционным тормозным механизмам
автотранспортных средств предъявляются следующие требования:
1 высокая
эффективность действия, т.е. создание большого тормозного момента;
2 стабильность
эффективности при изменении внешних условий и режима торможений;
3 высокая
надежность и долговечность трущейся пары;
4 плавность
действия, отсутствие при торможении вибраций, “писка”, выделения газов;
5 способность
за короткое время отводить в атмосферу значительное количество тепла;
6 малая
трудоемкость технического обслуживания и ремонта.
1.2 Обзор и анализ конструкции объекта
.2.1 Тормозные механизмы
Тормозным механизмом автомобиля называется
механизм для создания искусственного сопротивления вращению колес автомобиля.
Фрикционный тормоз - это механизм,
осуществляющий торможение автомобиля за счет сил трения между его неподвижными
и вращающимися деталями.
Тормозные механизмы, устанавливаемые на
автомобилях, по конструкции делятся на: дисковые, барабанные колодочные и
барабанные ленточные.
Дисковым тормозом называют фрикционный тормоз,
имеющий ротор с плоской рабочей поверхностью, на сторонах которой создаются
тормозные силы.
Барабанным колодочным называют тормоз, в котором
силы трения создаются на внутренней поверхности вращающегося цилиндра.
Барабанным ленточным называется тормоз, в
котором силы трения создаются на наружной поверхности вращающегося цилиндра за
счет прижатия гибкой ленты, облицованной гибким материалом.
В современном автомобилестроении наиболее широко
применяются барабанные и дисковые колодочные тормозные механизмы, выгодно
отличающиеся компактностью, высокой эффективностью и сравнительно стабильными
характеристиками.
.2.1.1 Барабанные тормозные механизмы
Барабанный тормозной механизм имеет симметричные
колодки (обычно две), несущие на наружных цилиндрических поверхностях
фрикционные тормозные накладки, которые под действием приводного устройства
прижимаются к внутренней цилиндрической поверхности барабана.
Колодка имеет одну степень свободы, если она
поворачивается вокруг неподвижной геометрической оси. Это достигается или
шарнирной связью колодки с закрепленной в суппорте осью, или помещением
радиусного конца колодки в соответствующее цилиндрическое гнездо суппорта.

У колодки с двумя степенями свободы
геометрическая ось их поворота имеет возможность перемещения, что позволяет
колодке самоустанавливаться, а следовательно, обеспечивает лучшее прилегание ее
к барабану и более равномерный износ накладки. Колодки с двумя степенями
свободы либо опираются закругленным концом на скошенную плоскость суппорта и
скользят по ней, либо соединяются с последним при помощи промежуточного звена,
которое, в свою очередь, имеет неподвижную геометрическую ось поворота
относительно суппорта. Иногда таким звеном является вторая колодка тормоза.
Колодку, которая моментом трения прижимается к
тормозному барабану, называют активной, а которая отжимается - пассивной
(самоприжимная и самоотжимная).
Тормозной механизм с равными приводными силами и
односторонним расположением опор имеет одно гидравлическое разжимное
устройство, которое обеспечивает равенство тормозных сил. Однако, при данных
упрощениях активная колодка обеспечивает, примерно, в два раза больший
тормозной момент, что приводит к быстрому ее изнашиванию. Тормозная
эффективность одинакова (Кэ=0,8) независимо от направления движения.
Статическая характеристика не линейна, что свидетельствует о недостаточной
стабильности. Такие тормозные механизмы нашли применение на грузовых
автомобилях большой грузоподъемности.
Тормозной механизм с равными приводными силами и
разнесенными опорами имеет обе активные колодки при движении вперед,
следовательно, обе накладки имеют одинаковый износ.
Коэффициент тормозной эффективности Кэ=1,08, то
есть тормозной момент больше приводного. На заднем ходу эффективность этого
механизма, примерно, в два раза меньше. Это объясняет использование механизма
только для передних колес.
.2.1.2 Дисковые тормозные механизмы
Основное положительное качество дискового
тормоза - высокая стабильность тормозного момента в условиях интенсивного
торможения.
Конструкции дисковых тормозных механизмов могут
выполнятся с неподвижной или с плавающей скобой. Конструкция с неподвижной
скобой приведена на рисунке 1.1.
Рисунок 1
Фиксированные скобы выполняются как с пазом для
демонтажа колодок, так и сплошными. Дисковые тормозные механизмы со сплошной
фиксированной скобой применяются на грузовых автомобилях, где требуется большое
приводное усилие, а следовательно, повышенная жесткость скобы.
В дисковом тормозном механизме с плавающей
скобой гидроцилиндр устанавливается в скобе с одной стороны диска. При
торможении поршень прижимает к диску одну из колодок. Реактивная сила
перемещает саму скобу по специальным направляющим суппорта в противоположном
направлении, и она прижимает к диску вторую колодку.
В фиксированной скобе оппозитно размещаются два,
три или четыре цилиндра. При четырехцилиндровой скобе появляется возможность
создания двухконтурного привода, оба контура которого воздействуют на один и
тот же тормозной механизм. Плавающие скобы имеют обычно один, изредка два
цилиндра, размещенные с одной стороны. При этом цилиндр может быть выполнен за
одно со скобой или крепиться на ней.
Конструкция дисковых тормозных механизмов хорошо
приспособлена для применения автоматических устройств регулирования зазора и
обеспечивает быструю замену накладок, что очень важно с точки зрения
технического обслуживания тормозов. Правда, дисковые тормозные механизмы имеют
и недостатки:
·
отсутствие
серводействия заставляет увеличичивать приводные силы, что влечет за собой
практически обязательное использование усилителей;
·
значительные
силы прижатия накладок к диску и малая их рабочая площадь приводят к высоким
удельным давлениям в контакте и повышенным износам накладок;
·
повышенный
износ накладок обусловлен и тем, что механизм открыт для попадания пыли и
грязи, особенно при установке на задние колеса;
·
весьма
затруднительное осуществление механического привода дисковых тормозов, что
усложняет их использование в стояночной тормозной системе и при работе с
пневматическим приводом.
Рисунок 2
Тормозная система Лада Калина
двухконтурная, диагональная. Передние тормоза дисковые задние барабанные. Более
подробно о конструкции и ремонте тормозной системы вы можете узнать
ознакомившись с статьями из данной категории - "Тормозная система
автомобиля Лада Калина". Особенности конструкции тормозов Лада Калина
На автомобилях Лада Калина применяют рабочую
тормозную систему с диагональным разделением контуров, что значительно повышает
безопасность вождения автомобиля. Один контур гидропривода (рис. 2)
обеспечивает работу правого переднего и левого заднего тормозных механизмов,
другой - левого переднего и правого заднего.
Рисунок 3: Тормозной механизм переднего колеса
автомобилей ваз 2108, ваз 2109, ваз 21099: 1 - тормозной диск; 2 - направляющая
тормозных колодок; 3 - тормозной суппорт; 4 - тормозные колодки; 5 - цилиндр; 6
- поршень; 7 - уплотнительная манжета; 8 - защитный чехол направляющего пальца;
9 - направляющий палец; 10 - защитный кожух
Рисунок 4 Схема тормозной системы автомобилей
ваз
1.2.2 Тормозной привод автомобиля
Тормозной привод служит для передачи работы,
совершаемой водителем, от тормозной педали к тормозным механизмам.
Тормозные приводы различают:
·
гидравлический,
приводимый в действие мускульной силой водителя;
·
гидравлический
с усилителем;
·
пневматический;
·
комбинированный;
·
механический.
1.2.2.1 Тормозной гидропривод
Схемы двухконтурного гидропривода торозов свакуумным
усилителем: а - раздельный привод на передний и задний мосты; б, в - один
контур на передние тормоза, другой контур на передние и задние тормоза; г -
двухконтурный привод с гидровакуумными усилителями в каждом контуре; д -
диагональная схема разделения привода
Гидропривод томозов в процессе служебного
торможения работает при давлении 2…4 МПа, при экстренном торможении при
давлении 6…10МПа и выше. Этот привод обеспечивает пропорцинальность между
усилием на тормозной педали и давлением в колесных цилиндрах. При применении
вакуумных и гидровакуумных усилителей усилие на тормозной педали при экстренных
торможениях не превышает 250…300Н.
Рисунок 5
1.2.2.3 Механический тормозной привод
Механический тормозной привод в качестве привода
рабочей тормозной системы в настоящее время не применяется из-за следующих
недостатков:
·
сложность
и трудоемкость компоновки;
·
трудоемкий
уход;
·
малый
КПД привода.
Механический тормозной привод
необходим для стояночной тормозной системы благодаря высокой надежности при
длительном действии.
Механический тормозной привод на легковых
автомобилях используют только в качестве тормозной стояночной системы с
механизмами задних колес с рычажно-тросовым механизмом.
.3 Обоснование и описание выбранного варианта
На данном автомобиле применяется тормозная
система с диагональным разделением контуров, один из которых обслуживает
тормозные механизмы правого переднего и левого заднего колес, другой - левого
переднего и правого заднего колес. Диагональный привод тормозных механизмов
сочетается с отрицательным плечом обката передних колес. Такая схема привода
обеспечивает сохранение прямолинейного движения и достаточную эффективность
торможения при разгерметизации одного из контуров. Гидропривод тормозов
компактен, имеет малое время и плавность срабатывания, высокое значение КПД
(0,95); обеспечивает одновременное торможение всех колес автомобиля. Однако он
малоэффективен при неработающем усилителе, требует большого усилия на тормозной
педали при буксировке с неработающим двигателем.
В приводе тормозов применяются вакуумный
усилитель и регулятор давления задних тормозов. Вакуумный усилитель создает
комфорт при управлении автомобилем за счет уменьшения усилия, прикладываемого к
педали тормоза, и хода педали. Регулятор давления препятствует блокировке
задних колес прежде, чем заблокируются передние колеса. Он срабатывает при
определенном давлении, и его действие не зависит от нагрузки на заднюю ось
автомобиля
Рисунок 6: Схема тормозной системы легкового
автомобиля: 1 - тормозной диск; 2 - суппорт в сборе с накладками; 3 и 10 -
передний и задний тормозные шланги; 4 - гланый тормозной цилиндр; 5 - бачок
главного цилиндра; 6 - вакуумный усилитель; 7, 9 и 19 - рычаг, трос и тяга
стояночного тормоза; 8 - кронштейн рычага стояночного тормоза; 11 - тормозной
барабан; 12 - кронштейн крепления регулятора давления; 13 и 17 рычаги привода
регулятора даления; 14 - задний колесный цилиндр; 15 - задние колодки; 16 -
регулятор давления задних тормозов; 18 - уравнитель трос; 20 - тормозная
педаль; А - трубопроводы контура «правый передний - левый задний»; Б -
трубопровод контура «левый передний - правый задний
2. Тяговый расчет автомобиля
2.1 Исходные данные
Тип автомобиля - легковой.= 1045+75 ·5 = 1420
Компоновка автомобиля -переднеприводная.
Класс автомобиля - 2-ой.
Число мест nm = 5;
Снаряжённая масса автомобиля mo = 1045 кг;
Масса одного пассажира mп = 75 кг;
Максимальная скорость движения= 135 км/ч или
Vmax = 37,5 м/с;
Коэффициент сопротивления качению=0,013;
Максимальный подъем преодолеваемый на 1-й
передаче
αmax=0,25;
Лобовая площадь Аa = 1,78 м2;
2.2 Определение весовых характеристик
2.2.1 Определение массы автомобиля
= mo+mп·nm;
кг;
2.2.2 Распределение массы по осям
= ma·q1; m2 = ma·q2;
где m1 и m2- массы на передней и задней осяхи q1
- коэффициенты распределения массы= 0.6; q1 = 0.4;= 1420·0.6=852 кг;=
1420·0.4=568 кг
2.2.3 Подбор шин
широкопрофильные
шины 175/70 R 14;=14” d - посадочный диаметр в дюймах
”=2.54
см;= 14·2.54·10-2 = 0.356 м;=175; В - ширина шины= 0.6·175·10-3 = 0.105 м; H -
высота шиныст = 0.5d+0.85H;ст = 0.27 м;ст - статический радиус
.2.4
КПД трансмиссии

2.3 Определение параметров двигателя
2.3.1 Определение мощности двигателя при
максимальной скорости
 , кВт;
, кВт;
 , кВт;
, кВт;
 - мощность двигателя при
максимальной скорости
- мощность двигателя при
максимальной скорости
 - фактор обтекаемости, для легковых
автомобилей= Cx·ρ/2 =0.2;
- фактор обтекаемости, для легковых
автомобилей= Cx·ρ/2 =0.2;
 - лобовая площадь
- лобовая площадь
 - кпд трансмиссии
- кпд трансмиссии
ψv = fk·
(1+V2/2000)=0.013·(1+5·10-4·37.52)=0.002;= =33,07 кВт;
=33,07 кВт;
2.3.2 Определение максимальной мощности
двигателя
 , кВт;
, кВт;
 -максимальная мощность двигателя, b,
с; - коэффициенты, зависящие от типа двигателя= b = c = 1 , т.к. двигатель
карбюраторного типа
-максимальная мощность двигателя, b,
с; - коэффициенты, зависящие от типа двигателя= b = c = 1 , т.к. двигатель
карбюраторного типа
 - угловая скорость при максимальной
скорости
- угловая скорость при максимальной
скорости
 - угловая скорость при максимальной
мощности
- угловая скорость при максимальной
мощности
 =1,15
=1,15  =34,8 кВт;
=34,8 кВт;
2.3.3 Определение текущих значений мощности
 , кВт;
, кВт;
 - угловое ускорение. Изменяется от
- угловое ускорение. Изменяется от  до
до
- угловое ускорение
 кВт;
кВт;
2.3.4 Определение крутящего момента двигателя
 ;
;
|
 ,
об/мин, ,
об/мин,     , кВтМе , Hм , кВтМе , Hм
|
|
|
|
|
|
|
|
1000
|
104,6
|
0,166
|
0,027
|
0,005
|
6,54
|
62,54
|
|
2000
|
209,3
|
0,33
|
0,109
|
0,035
|
14,06
|
67,17
|
|
3000
|
314
|
0,5
|
0,25
|
0,125
|
21,75
|
69,26
|
|
4000
|
418,6
|
0,667
|
0,445
|
0,296
|
28,39
|
67,83
|
|
6000
|
628
|
1
|
1
|
1
|
34,8
|
55,41
|
|
6900
|
722,2
|
1,15
|
1,323
|
1,52
|
33,16
|
45,9
|
2.4 Определение передаточных чисел
трансмиссии
2.4.1 Определение передаточного отношения
главной передачи
 ,м/с;
,м/с;
 ;
;
 - передаточное отношение главной
передачи
- передаточное отношение главной
передачи
 - радиус качения
- радиус качения
 ;
;
 - передаточное отношение коробки
высшее, передача на которой достигается максимальная скорость, для
пятиступенчатой коробки передач принимаем
- передаточное отношение коробки
высшее, передача на которой достигается максимальная скорость, для
пятиступенчатой коробки передач принимаем  .
.
Подставляя данные получим
2.4.2 Определение передаточных отношений КПП
Максимальная тяговая сила на I
передаче должна быть больше максимальной силы по дорожному сопротивлению и
меньше предельной силы по сцеплению.

 - максимальный крутящий момент
двигателя (по таблице)коэффициент перераспределения нагрузки при трогании
автомобиля с места.
- максимальный крутящий момент
двигателя (по таблице)коэффициент перераспределения нагрузки при трогании
автомобиля с места.
Принимаем kz=0,55;

Исходя из неравенства примем
 ;
;
 ;
;
 ;
;
Выберем ряд стандартных чисел:




.5 Анализ тягово-скоростных свойств и динамики
автомобиля
По выбранным значениям угловой
скорости коленчатого вала в диапазоне от  до
до  рассчитываем основные зависимости и
характеристики для каждой отдельно взятой передачи.
рассчитываем основные зависимости и
характеристики для каждой отдельно взятой передачи.
Первая передача
Скорость автомобиля на данной
передаче определяется по формуле:
 ;
;
Силу тяги рассчитываем по формуле


 ;
;
Силу сопротивления воздуха, которую
преодолевает автомобиль при движении, определяем по формуле:

 ;
;
Коэффициент сопротивления дороги для
данной передачи находим по формуле:

 ;
;
Сила сопротивления дороги
рассчитывается:

где  - вес автомобиля, .
- вес автомобиля, .

 ;
;
Динамический фактор определяем по
формуле
 ;
;
Для определения ускорения автомобиля
во время разгона необходимо знать коэффициент, учитывающий влияние вращающихся
масс, который определяется по формуле:
где  - коэффициент, учитывающий влияние
вращающихся масс колёс,
- коэффициент, учитывающий влияние
вращающихся масс колёс,  ;
;
 - коэффициент, учитывающий влияние
вращающихся масс двигателя,
- коэффициент, учитывающий влияние
вращающихся масс двигателя,  .
.
 .
.
Ускорение находим из выражения:
 .
.

 ;
;
Величина обратного ускорения
определяется следующим образом:
 ;
;
Результаты расчётов сводим в таблицу 2.2 .
Таблица 2.2
Основные параметры автомобиля при разгоне на
первой передаче
|
 , ,
 100020003000400060006900 100020003000400060006900
|
|
|
|
|
|
|
|
 , ,
 104,6209,3314418,6628722,2 104,6209,3314418,6628722,2
|
|
|
|
|
|
|
|
 , ,
 6,5414,0621,4528,3934,833,16 6,5414,0621,4528,3934,833,16
|
|
|
|
|
|
|
|
 ,
5,312,8319,726,231,930,4 ,
5,312,8319,726,231,930,4
|
|
|
|
|
|
|
|
 , ,
 62,5467,1769,2667,8355,4145,9 62,5467,1769,2667,8355,4145,9
|
|
|
|
|
|
|
|
 ,
1,352,74,075,438,159,4 ,
1,352,74,075,438,159,4
|
|
|
|
|
|
|
|
 ,
4442,14770491948173935,73260 ,
4442,14770491948173935,73260
|
|
|
|
|
|
|
|
 ,
0,652,595,910,523,631,5 ,
0,652,595,910,523,631,5
|
|
|
|
|
|
|
|
 ,181,65183,59186,9191,5204,6212,5 ,181,65183,59186,9191,5204,6212,5
|
|
|
|
|
|
|
|
 0,320,340,350,340,280,23 0,320,340,350,340,280,23
|
|
|
|
|
|
|
|
 ,
1,781,891,951,91,541,25 ,
1,781,891,951,91,541,25
|
|
|
|
|
|
|
|
 0,0130,0130,0130,0130,0130,014 0,0130,0130,0130,0130,0130,014
|
|
|
|
|
|
|
|
 ,
0,5620,5290,5120,5260,640,8 ,
0,5620,5290,5120,5260,640,8
|
|
|
|
|
|
|
Вторая передача
Скорость автомобиля на данной передаче
определяется:
 ;
;
Рассчитываем силу тяги:
 ;
;
Определяем силу сопротивления воздуха, которую
преодолевает автомобиль при движении:
 ;
;
Коэффициент сопротивления дороги для
данной передачи:
 ;
;
Сила сопротивления дороги
рассчитывается:
 ;
;
Определяем динамический фактор:
 ;
;
Коэффициент, учитывающий влияние
вращающихся масс:
 .
.
Находим ускорение:
 ;
;
Величина обратного ускорения
определяется следующим образом:
 ;
;
Результаты расчётов сводим в таблицу
2.3.
Таблица 2.3
Основные параметры автомобиля при
разгоне на второй передаче
|
,
100020003000400060006900
|
|
|
|
|
|
|
|
,
104,6209,3314418,6628722,2
|
|
|
|
|
|
|
|
,
6,5414,0621,4528,3934,833,16
|
|
|
|
|
|
|
|
,
5,312,8319,726,231,930,4
|
|
|
|
|
|
|
|
,
62,5467,1769,2667,8355,4145,9
|
|
|
|
|
|
|
|
,
1,93,85,77,611,4113,16
|
|
|
|
|
|
|
|
,
3131,73363,53513,63440,72811,22328,6
|
|
|
|
|
|
|
|
,
1,285,1411,5620,646,361,6
|
|
|
|
|
|
|
|
,182,28186,14192,56201,6227,3242,3
|
|
|
|
|
|
|
|
0,220,240,250,240,180,13
|
|
|
|
|
|
|
|
,
1,21,311,371,30,960,67
|
|
|
|
|
|
|
|
,
0,830,760,720,751,041,49
|
|
|
|
|
|
|
Третья передача
Скорость автомобиля на данной передаче
определяется:
 ;
;
Рассчитываем силу тяги:
 ;
;
Определяем силу сопротивления
воздуха, которую преодолевает автомобиль при движении:
 ;
;
Коэффициент сопротивления дороги для
данной передачи:
 ;
;
Сила сопротивления дороги
рассчитывается:
;
Определяем динамический фактор:
 ;
;
Коэффициент, учитывающий влияние
вращающихся масс:
 .
.
Находим ускорение:
 ;
;
Величина обратного ускорения определяется
следующим образом:
 ;
;
Результаты расчётов сводим в таблицу
2.4.
Таблица 2.4
Основные параметры автомобиля при
разгоне на третьей передаче
|
,
100020003000400060006900
|
|
|
|
|
|
|
|
,
104,6209,4314,2418,9628722,2
|
|
|
|
|
|
|
|
 ,
19,541,662,174,275,774,2 ,
19,541,662,174,275,774,2
|
|
|
|
|
|
|
|
 ,
17,938,357,168,369,668,3 ,
17,938,357,168,369,668,3
|
|
|
|
|
|
|
|
,
62,5467,1769,2667,8355,4145,9
|
|
|
|
|
|
|
|
,
2,75,48,1510,816,318,7
|
|
|
|
|
|
|
|
 ,
222124312507245520051630 ,
222124312507245520051630
|
|
|
|
|
|
|
|
 ,
2,5910,423,641,5294,58124,5 ,
2,5910,423,641,5294,58124,5
|
|
|
|
|
|
|
|
 ,192,85242,5301,5399463541,7 ,192,85242,5301,5399463541,7
|
|
|
|
|
|
|
|
0,160,170,180,170,140,108
|
|
|
|
|
|
|
|
,
0,850,90,960,890,730,53
|
|
|
|
|
|
|
|
 0,0130,0130,0140,0150,0150,016 0,0130,0130,0140,0150,0150,016
|
|
|
|
|
|
|
|
,
1,171,11,041,121,31,8
|
|
|
|
|
|
|
Четвёртая передача
Скорость автомобиля на данной передаче
определяется:
 ;
;
Рассчитываем силу тяги:
 ;
;
Определяем силу сопротивления
воздуха, которую преодолевает автомобиль при движении:
 ;
;
Коэффициент сопротивления дороги для
данной передачи:
 ;
;
Сила сопротивления дороги
рассчитывается:

Определяем динамический фактор:
 ;
;
Коэффициент, учитывающий влияние
вращающихся масс:
 .
.
Находим ускорение:
 ;
;
Величина обратного ускорения
определяется следующим образом:
 ;
;
Результаты расчётов сводим в таблицу
2.5.
Таблица 2.5
Основные параметры автомобиля при
разгоне на четвёртой передаче
|
,
100020003000400060006900
|
|
|
|
|
|
|
|
,
104,6209,4314,2418,9628722,2
|
|
|
|
|
|
|
|
,
19,541,662,174,275,774,2
|
|
|
|
|
|
|
|
,
17,938,357,168,369,668,3
|
|
|
|
|
|
|
|
,
62,5467,1769,2667,8355,4145,9
|
|
|
|
|
|
|
|
,
5,7711,5517,323,12628,6
|
|
|
|
|
|
|
|
,
10451122,41154,81133,4925,8767
|
|
|
|
|
|
|
|
,
11,8547,5106,5190240,6291
|
|
|
|
|
|
|
|
,192,85242,5301,5399463541,7
|
|
|
|
|
|
|
|
0,070,0770,0750,0670,050,03
|
|
|
|
|
|
|
|
,
0,50,570,550,470,30,1
|
|
|
|
|
|
|
|
0,0130,0140,0140,0150,0160,018
|
|
|
|
|
|
|
|
,
21,71,82,133,310
|
|
|
|
|
|
|
Пятая передача
Скорость автомобиля на данной передаче
определяется:
 ;
;
Рассчитываем силу тяги:
 ;
;
Определяем силу сопротивления
воздуха, которую преодолевает автомобиль при движении:
 ;
;
Коэффициент сопротивления дороги для
данной передачи:
 ;
;
Сила сопротивления дороги
рассчитывается:
;
Определяем динамический фактор:
 ;
;
Коэффициент, учитывающий влияние
вращающихся масс:
 .
.
Находим ускорение:
 ;
;
Величина обратного ускорения
определяется следующим образом:
 ;
;
Результаты расчётов сводим в таблицу
2.6.
Таблица 2.6
Основные параметры автомобиля при
разгоне на пятой передаче
|
,
100020003000400060006900
|
|
|
|
|
|
|
|
,
104,9209,4314,2418,9628722,2
|
|
|
|
|
|
|
|
,
19,541,662,174,275,774,2
|
|
|
|
|
|
|
|
,
17,938,357,168,369,668,3
|
|
|
|
|
|
|
|
,
62,5467,1769,2667,8355,4145,9
|
|
|
|
|
|
|
|
,
7,815,323,331,0734,9538,5
|
|
|
|
|
|
|
|
,
777,36835860,9843,1688,7570,5
|
|
|
|
|
|
|
|
,
21,683,3193,2343,6434,8527,7
|
|
|
|
|
|
|
|
,202,6278,3236608,3713,4831,2
|
|
|
|
|
|
|
|
0,050,050,0470,0350,020,003
|
|
|
|
|
|
|
|
,
0,380,210,190,120,04-
|
|
|
|
|
|
|
|
0,0130,0140,0160,0190,02-
|
|
|
|
|
|
|
|
,
4,64,75,38,325-
|
|
|
|
|
|
|
На основе полученных в ходе расчёта данных
строятся графики: тяговый баланс, динамическая характеристика, ускорения и
обратные ускорения автомобиля.
Время и путь разгона автомобиля
определяем графоаналитическим способом. Для этого разбиваем кривую обратных
ускорений на шесть интервалов и считаем, что в каждом из них автомобиль
разгоняется с постоянным ускорением. Заменяя точное значение площади под кривой
обратных ускорений, в каждом интервале  , на значение площади прямоугольника
со сторонами и
, на значение площади прямоугольника
со сторонами и  переходим к
приближенному интегрированию:
переходим к
приближенному интегрированию:

 ;
;
Таким образом, значения времени
разгона автомобиля в заданных точках интервала будут определяться:

 ;
;

 ;
;
Путь разгона рассчитываем всё тем же
методом по формуле:


 ;
;
Значения пути разгона автомобиля в
заданных точках интервала будут определяться:
 ;
;

 ;
;
Полученные результаты сводим в
таблицу 2.7 и представляем в виде графика времени и пути разгона (Приложение
2).
Таблица 2.7 Время и путь разгона
автомобиля
|
,
1,352,75,7711,5517,323,126
|
|
|
|
|
|
|
|
|
,
0,5620,52922,72,83,24,76
|
|
|
|
|
|
|
|
|
 ,
00,744,5418,12333,951,362,84 ,
00,744,5418,12333,951,362,84
|
|
|
|
|
|
|
|
|
 ,
01,520,73177,63275,09423,86514,978 ,
01,520,73177,63275,09423,86514,978
|
|
|
|
|
|
|
|
Мощность, приходящая на колёса автомобиля,
определяется с учётом потерь в трансмиссии:

 ;
;
Мощность, затрачиваемая на
преодоление сил сопротивления движению автомобиля, приведённая к маховику,
рассчитывается для высшей передачи:
 ;
;
Результаты расчёта сводим в таблицу
2.9 и на их основании строим график мощностного баланса автомобиля.
Таблица 2.8 Значения мощностей
автомобиля
|
,
5,7711,5517,323,12628,6
|
|
|
|
|
|
|
|
,
17,9438,2757,1368,2669,6468,26
|
|
|
|
|
|
|
|
 ,
1,2093,0445,66910,01813,08416,839 ,
1,2093,0445,66910,01813,08416,839
|
|
|
|
|
|
|
Значения мощностей автомобиля на каждой
передаче: Таблица 2.9
|
 19,541,662,174,275,774,2 19,541,662,174,275,774,2
|
|
|
|
|
|
|
|
 17,9438,2757,1368,2669,6468,26 17,9438,2757,1368,2669,6468,26
|
|
|
|
|
|
|
|
 11,352,74,075,438,159,4 11,352,74,075,438,159,4
|
|
|
|
|
|
|
|
|
2
|
1,9
|
3,8
|
5,7
|
7,6
|
11,41
|
13,16
|
|
3
|
2,7
|
5,4
|
8,15
|
10,8
|
16,3
|
18,7
|
|
4
|
5,77
|
11,55
|
17,3
|
23,1
|
26
|
28,6
|
|
5
|
7,8
|
15,3
|
23,3
|
31,07
|
34,95
|
38,5
|
Производим расчёт топливно-экономической
характеристики автомобиля.
Расход топлива определяем по формуле:

где  - коэффициент, учитывающий изменение
удельного эффективного расхода топлива в зависимости от
- коэффициент, учитывающий изменение
удельного эффективного расхода топлива в зависимости от  .
.
Определяется по графику в
зависимости от отношения  .
.
 ,
,  ;
;
 - коэффициент, учитывающий
изменение удельного эффективного расхода топлива в зависимости от степени
использования мощности двигателя
- коэффициент, учитывающий
изменение удельного эффективного расхода топлива в зависимости от степени
использования мощности двигателя  . Определяется графически.
. Определяется графически.
Степень использования мощности
двигателя рассчитываем для высшей передачи:

 ,
,  ;
;
 - минимальный удельный эффективный
расход топлива, для карбюраторного двигателя
- минимальный удельный эффективный
расход топлива, для карбюраторного двигателя 
 ;
;
 - плотность топлива, для бензина
- плотность топлива, для бензина 
 .
.

 ;
;
Результаты расчёта сводим в таблицу
2.8 и на их основании строим график топливно-экономической характеристики
(Приложение 2).
Расход топлива при разгоне
автомобиля на высшей передаче Таблица 2.10
|
,
5,77
|
11,55
|
17,3
|
23,1
|
26
|
28,6
|
|
|
 ,
6,758,4910,5513,9616,2118,96 ,
6,758,4910,5513,9616,2118,96
|
|
|
|
|
|
|
3. Расчет тормозной системы
.1. Исходные данные.
Полная масса ma= 1420 кг;
Снаряженная масса ma1= 1045 кг;
Распределение массы по осям:
Полная: m1= 852 кг;= 568 кг;
Колесная база: L= 2180 мм;
Статический радиус колеса: rст= 270 мм;
Высота центра тяжести: hq= 520 мм.
.2 Расчет переднего тормозного механизма
Исходные данные:
Диаметр поршня dп= 40 мм
Диаметр диска D= 239 мм
Средний радиус поверхности трения Rср= 87 мм
Тормозной момент:
=m∙P∙i∙Rср,
где: m= 0.40 -
коэффициент трения между накладкой и колодкой;= 2 - число пар трения;- усилие
развиваемое поршнем;
= P1∙S1
где: P1 - давление в цилиндре переднего тормоза,
кг/см2;- площадь поршня переднего тормоза,= p*dп2/4 =
3,14*(4,0)2/4= 12,6 см2.=0,4*12,6*P1*2*8,7=88*P1
Рис. 3.1 Механизм переднего тормоза
.3 Расчет заднего тормозного механизма
Диаметр барабана: Dб= 180 мм
Диаметр колесного цилиндра: Dц= 19 мм
Угол охвата колодки: b=1080
a0= 330= 70 мм, h2= 70 мм.
Рис.3.2 Механизм заднего тормоза
Для ведущей колодки:
xп=b+a0-900+j,
где: j - угол трения, j=
arctg m;
m= 0,35 - коэффициент трения накладок;
j= arctg 0,35= 19,30;
xп=1080+330-900+190=700,
что соответствует
r/rб=1,107
Где r - условный радиус
действия касательных сил,б - радиус барабана, rб= 90 мм,
Радиус трения
= r*Mред
где: Mред= M/Ö1+M=0,35/Ö1+0,35=
0,301= rб*1,107*Mред= 90*1,107*0,301=30 мм
Находим тормозной момент колодки:
т.п= Q*rt*((h1+h2)/(h2-rt))= Q*3*((7+7)/(7-3))=
11*Q кг*см,
где: Q - усилие, развиваемое поршнем тормозного
цилиндра, кг.
Для ведомой колодки:
xп=b+a0-900-j,
xп=1080+330-900-190=320,
что соответствует r/rб=1,09;
Радиус трения rt= r*Mред;=
rб*1,09*Mред= 90*1,09*0,301=2,953 мм.
Тормозной момент колодки:
т.з= Q*rt*((h1+h2)/(h2-rt))=
Q*2,953*((7+7)/(7-2,953))= 4,2*Q кг*см,
Суммарный тормозной момент заднего тормозного
механизма:
т2= Mт.п+ Mт.з=(11+4,2)*Q= 15,2*Q кг*см,
где: Q - усилие, развиваемое поршнем колесного
цилиндра,
=S*P2
где: S - площадь поршня колесного цилиндра,= p*rп2=3,14*(1,9/2)2=2,9
см2- давление в цилиндре заднего тормоза, кг/смс2
Мт2= 15,2*2,9*P2= 44,1*P2 кг*см.
Тормозной момент заднего тормозного механизма с
учетом действия стяжных пружин:
т= 44,1(P2-5.5) кг*см,
где: 5,5 - давление, необходимое для
уравновешивания действия стяжных пружин.
3.4 Оптимальное соотношение между давлением в
передних и задних тормозах с учетом перераспределения массы при торможении
Рис. 3.3 Схема сил действующих на автомобиль при
торможении
Давление в тормозных цилиндрах передних и задних
колес при полном использовании сцепления шин с дорогой:
=(ma*rк/2L*K1)[b*(a/q)+ (a/q)2*hq],
кг/см2=(ma*rк/2L*K2)[с*(a/q)- (a/q)2*hq]+5,5, кг/см2,
где: K1 и K2 - характеристика передних и задних
тормозных механизмов.=88, K2=44,1и с - координаты центра тяжести по
горизонтали;- замедление автомобиля в м/с2.
Число 5,5 учитывает влияние стяжных пружин
колодок.=(1420*27/2*218*88)[96,5*(a/9,81)+ (a/9,81)2*52],
кг/см2=(1420*27/2*218*44.1)[121,5*(a/9,81)- (a/9,81)2*52]+5,5 ,
кг/см2=0,99*(9,83*a+0,54*a2), кг/см2=1,99*(12,4*a+0,54*a2)+5,5 ,
кг/см2=9,73*a+0,53*a2, кг/см2=24,6*a+1,07*a2+5,5 , кг/см2
Находим данные давлений при замедлении от 1 до 9
м/с2 и заносим в таблицу и строим график.
Координаты центра тяжести при полной нагрузке:=
L*m1/ma=2180*852/1420=1308 мм= L - b= 2180-1308=872 мм
|
а,
м/с2
|
P1
|
P2
|
P
|
Pпед
|
|
1
|
9,75
|
24,8
|
10,8
|
2,5
|
|
2
|
21,58
|
52,56
|
22,7
|
5,4
|
|
3
|
43,5
|
69,67
|
35,7
|
9,211
|
|
4
|
47,4
|
86,78
|
49,8
|
12,464
|
|
5
|
61,9
|
90,75
|
65,1
|
15,975
|
|
6
|
80,7
|
96,5
|
81,5
|
19,745
|
|
7
|
96,4
|
115,3
|
99,0
|
23,773
|
|
8
|
111,7
|
133,82
|
117,6
|
28,058
|
|
9
|
130,5
|
140,23
|
137,4
|
32,602
|

= 60 кг/см2, a=14о tga=0,25
3.5 Расчет вакуумного усилителя
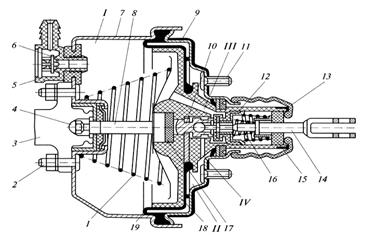
Вакуумный усилитель автомобилей ВАЗ: 1, 16 -
пружины; 2, 11 - болты; 3 - цилиндр; 4, 5 - наконечники; 6, 12 - клапаны; 7, 18
- корпусы; 8 - шток; 9 - крышка; 10 - поршень; 13 - чехол; 14 -толкатель; 15 -
фильтр; 17-буфер; 19-диафрагма; I, II- полости; III, IV - каналы; Sq=182см2 -
эффективная площадь диафрагмы вакуумного усилителя; dт=17,6 мм - диаметр поршня
толкателя; Sт=2,43 см2 - площадь поршня толкателя; dшт=25,3 мм - диаметр поршня
штока; Sшт=5,01 см2 - площадь поршня штока; Рпр=13 кг - усилие возвратной
пружины; Pв.max= 0,5 кг/см2 - разряжение в камере усилителя, соединенной с
впускным коллектором двигателя; Pвак - величина разряжения в камере усилителя,
соединенной с атмосферой; Pпед - усилие на педали тормоза; iпед= 6 -
передаточное число педали тормоза; dГТЦ = 19 мм - диаметр поршня главного
тормозного цилиндра; SГТЦ = p*(1,9)2/4 = 2,84 см2 - площадь
поршня главного тормозного цилиндра; P - давление в главном тормозном цилиндре
Уравнение равновесия для случая 0<Рвак<Рв.max*Sгтц*Sт=
Pпед*iпед*Sшт*2,84*2,43= Pпед*6*5,01пед= 0,23*Р
Точка перегиба Р = f(Pпед), уравнение равновесия
Рвак= Рв. max
*Pвак- Рпр)* Sшт=(Sшт- Sт)*Р*SГТЦ
(182*0,5-13)*5,01=(5,01-2,43)*P*2,84
Р= 57 кг/см2
После точки перегиба графика:
*Sгтц= Pпед*iпед+ Рв. max* Sq* Рпр*2,84=
Pпед*6+0,5*182*13пед= 0,47*P -13
.6 Усилие на педали тормоза
Давление в ГТЦ с учетом недоиспользования задних
тормозов.
До точки включения регулятора: P1 =P2 =P,
=(ma*(a/q)*(rк/2)+К2*5,5)/(К1+К2),
После точки включения регулятора:
=P; P2=
A+(P1-A)*0,2=(ma*(a/q)*(rк/2)-К2*(0,75*A-5,5))/(К1+0.25*К2), где
,25 - статическая характеристика регулятора
давления,
А= 60кг/см2 - давление в момент включения
регулятора при полной нагрузке.
Подставляя известные величины получаем:
До точки включения
регулятора=(1420*(a/9,81)*(27/2)+44,1*5,5)/(88+44,1)= 14а+2;
После точки включения
регулятора:=(1420*(a/9,81)*(27/2)-44,1*(0,75*5,5-5,5))/(88+0.25*44,1)= 20а-1
Решая уравнения при замедлении от 1 до 9 м/с2
получаем результаты.
3.7 Расчет ручного тормоза
Привод стояночной тормозной системы: 1 - кнопка
фиксации рычага; 2 рычаг привода стояночного тормоза; 3 - защитный чехол; 4 -
тяга; 5 - уравнитель троса; 6 - регулировочная гайка; 7 - контргайка; 8 - трос;
9 - оболочка троса
По ОСТ 37.001.016-70 автомобиль должен
удерживаться на уклоне 25о при приложении к рычагу ручного тормоза усилия не
более 40 кг.
Тормозная сила, удерживающая автомобиль на
уклоне:
Рт=ma* sin a= 1420*sin 14о2I=
343 кг,
где a - величина уклона.
Тормозной момент на одном колесе:
= PT*rст/2=343*27/2=4630,5 кг*см,
где rст - статический радиус колеса.
Определение силового передаточного числа.
Передаточное число на рычаге:= 240/35,5=6,8
Передаточное число на уравнителе:у= P3/P2= 0,5
Передаточное число на тормозе:
где P4=P3*112/20= 5,6*P3;= P3*(112-20)/20=
4,6*P3;
Полное передаточное число привода:п= ip* iу* iт
=6,8*0,5*10,2=34,7
Усилие на рычаге привода:
= (P4+P5)/iп*h,
где h - КПД привода, h=
0,85
Характеристика барабанного тормоза:
Т2= (P6-Pпр)*21,51,
где Pпр= 22 кг - усилие стяжных пружин,
приведенных к оси тормозного цилиндра.=(MТ2+Pпр*21,51)/21,51=
(3071,2+22*21,51)/21,51=165 кг=P6*140/126= 183,3 кг;=P6*140/106= 217,9 кг;=
(P4+P5)/iп*h= (183,3+217,9)/34,7*0,85= 13,6 кг
,6 кг< 40 кг
3.8 Ход педали
Ход педали зависит от числа тормозных механизмов
и общего передаточного числа тормозного привода. Для двухосного автомобиля ход
педали рассчитывается по формуле:

 =2
=2
 ∙(0.5+0.5)+2
∙(0.5+0.5)+2
 )(0.4+0.4) ∙5∙1.06/
)(0.4+0.4) ∙5∙1.06/ = 41мм (45 мм)
= 41мм (45 мм)
Заключение
тормоз скоростной тяговый автомобиль
В данном курсовом проекте мною был произведен
тяговый расчет автомобиля второго класса и расчет тормозной системы.
Тяговый расчет включает в себя: расчет тягового,
мощностного баланса, динамической характеристики, ускорения при разгоне,
времени и пути разгона, топливной экономичности автомобиля. Все эти
характеристики автомобиля построены в виде графиков.
В расчете тормозной системы я определил основные
параметры и рассчитал детали тормозной системы, в который входили: расчет
переднего тормозного механизма, расчет заднего тормозного механизма,
оптимальное соотношение между давлением в передних и задних тормозах с учетом перераспределения
массы при торможении.
Подобранная тормозная система полностью
удовлетворяет всем требованиям рассчитанного автомобиля переднеприводной
компоновки, а именно возможности эффективного торможения, остановки и стоянки
автомобиля.
Литература
1. Осепчугов В.В., Фрумкин А.К. Автомобиль:
Анализ конструкций, элементы расчета.- Машиностроение 1989.-304
. Вахламов В.К. Автомобили: Конструкция и
элементы расчета.- М.: Издательский центр «Академия», 2006.-408с.
. Расчет тяговой динамики и топливной
экономичности автомобиля: Учеб. пособие/Сост. Л.А.Черепанов.- Тольятти: ТолПИ,
2001.-с.40с.