Математические модели динамических систем и процессов
Содержание
Введение
. Теоретическая часть
.1 Понятие динамических
систем
.2 Модели динамических систем
и процессов
.3 Моделирование непрерывной
системы контроля
.4 Математическое описание
непрерывной системы контроля
. Практическая часть
.1 Выполнение задания 1
.2 Выполнение задания 2
Заключение
Список использованных
источников
Введение
Достижения в теории и практике моделирования процессов и систем, в
современных условиях, связано со стремительным развитием вычислительной
техники. Что казалось невозможным при решении многих задач моделировании еще
несколько лет назад, сейчас легко реализуется на доступном инженерном уровне.
Появление и развитие инженерных пакетов моделирования, таких как Matlab,
Skylab, Labview, создало условия высокопроизводительного, объектно-ориентированного
моделирования на современных компьютерах.
Задачи моделирования процессов и систем многообразны. Моделирование
широко используется при инженерном проектировании и научных исследованиях: для
решения технических и экономических задач, при исследованиях в экологии и
социологии, в приборостроении и автоматизации управления.
Особенности применения моделирования в приборостроении связаны в первую
очередь с технологическими достижениями в датчикостроении, теории измерений и
обработки информации.
В области экономических задач применение моделирования дает эффективный
инструмент для управления проектами и прогнозирования развития экономических
процессов. Многие современные методы теории управления оказались эффективными
при решении экономических задач и достаточно легко реализуемыми на
математических моделях и постановке вычислительных экспериментов на
компьютерной технике.
Развитие нейросетей, микросистемотехники, нанотехнологии внесло много
существенно нового в методы моделирования процессов и систем, что дало также
эффективный инструмент для предварительного решения задач проектирования в
математическом виде на моделях и их численном исследовании на компьютерах.
Применение моделирования особенно эффективно при исследовании проектируемых систем
с целью изучения и прогнозировании различных явлений и процессов в этих
системах. Приближение к реальным условиям работы проектируемых систем
осуществляется при стохастическом моделировании, когда к условиям моделирования
добавляются случайные изменения параметров системы, возмущения и шумы измерений
физических величин.
В приборостроении актуально моделирование задач управления, получения,
передачи и преобразования информации. При этом современные модели везде для
описания процессов и систем используют дифференциальные уравнения и линейные
матричные преобразования.
Развитие современных методов моделирования создало предпосылки для
создания и исследования высокоэффективных систем, которые, как правило,
ориентированы на цифровые алгоритмы обработки информации, с применением
современных микропроцессоров, нейрокомпьютеров, процессоров с нечеткой логикой
и других современных технологических достижений.
1. Теоретическая часть
1.1 Понятие динамических систем
Динамические
системы - системы, под действием внешних и внутренних сил изменяющие во времени
свои состояния. Представления о динамических системах возникли как обобщение
<#"701362.files/image001.gif"> ,
где
I - единичная матрица; dt - период дискретности системы (процесса). Период
дискретности dt выбирается исходя из полосы пропускания ДС в соответствии с
импульсной теоремой.
Детерминированной
является ДС, у которой отсутствуют шумы возмущения и нет стохастических
процессов (или всеми этими факторами можно пренебречь). У чисто стохастической
ДС отсутствует детерминированный вектор входных сигналов.
Детерминировано-стохастическая система содержит как детерминированные воздействия,
так и стохастические процессы.
Объектами наблюдения динамических систем являются: информационные
процессы (ИП), объекты управления (ОУ), датчики первичной информации (ДПИ),
исполнительные устройства (ИУ). Первичной моделью объекта наблюдения типа ИП
является спектральная или корреляционная функция. Первичной моделью объекта
наблюдения типа ОУ, ДПИ и ИУ является дифференциальное уравнение (или
эквивалентная передаточная функция), связывающая вход и выход.
Датчик первичной информации - это элемент устройства, преобразующий
информацию о физической величине в сигнал, удобный для использования и
обработки. Он задается дифференциальным уравнением или передаточной функцией.
Передаточной функцией ДПИ является отношение преобразования Лапласа выходного процесса
ДПИ к преобразованию Лапласа входного процесса при нулевых начальных условиях.
Движением системы называется физический процесс изменения её переменных во
времени и пространстве. Выходные переменные Y(t), управляющие
входные воздействия U(t) и возмущающие входные воздействия V(t) рассматриваются в виде соответствующих векторов, которые
записываются в виде столбцовых матриц:
 ,
,  ,
,  .
.
1.3
Моделирование непрерывной системы контроля
Система
контроля предназначена для измерения и выдачи информации о контролируемом
процессе h(t), который содержит среднюю (детерминированную)
составляющую и стохастическую (случайную) g(t).
Измерение происходит при воздействии аддитивных шумов n(t).
Датчик, с помощью которого производятся измерения, является динамическим звеном
(в данном случае второго порядка). Эквивалентная схема системы контроля
представлена на рисунке 1
Рисунок
1 - Схема системы контроля
Случайная
составляющая g(t) измеряемого процесса задана спектральной плотностью Sg(w);
детерминированная - сигналом u(t); h(t)=g(t)+u(t) - полный информационный процесс; f(t)=h(t)+n(t) -
измерение процесса h(t) c аддитивными шумами n(t)
(задана спектральная плотность шума - Sn(w)); h(t)
-выходной сигнал ДПИ (датчик первичной информации); W(S) -
передаточная функция ДПИ. Детерминированное входное воздействие задано суммой
ступенчатой и гармонической функций.
Для
моделирования системы контроля в Matlab составляется схема моделирования, которая
представлена на рисунке 2.

Рисунок
2 - Схема моделирования системы контроля
.4
Математическое описание непрерывной системы контроля
Задана
спектральная плотность контролируемого процесса:
 .
.
Передаточная
функция объекта наблюдения:
 .
.
Интенсивность
шумов измерений R=17 (при измерении выходного сигнала объекта
наблюдения).
Путем
факторизации из модели в виде спектральной плотности получим передаточную
функцию формирующего фильтра входного процессора:
 .
.
Матричная
модель объекта наблюдения находится методом вспомогательной переменной.
Уравнение состояния в данном случае:
 .
.
Процесс
h(t) на выходе объекта наблюдения вычисляется в матричном
виде:
g=Cg*X.
В
данном примере получаем следующий вид матриц:

Матричная
модель датчика:

Выход
объекта наблюдения h=C0*X0.
Полное
уравнение объекта контроля содержит уравнение состояния входного процесса и
уравнение состояния объекта:
,
где
матрицы A, B и D составляются на основе дифференциальных уравнений
процесса и объекта контроля, которые имеют вид:




Или
относительно полного вектора :  :
:

Матрицы
A, B, C, D в данном случае имеют следующий вид:
= ; B=
; B= ;C=
;C= ; D=
; D= .
.
2.
Практическая часть
.1
Выполнение задания 1
Алгоритм
выполнения работы в среде Simulink.
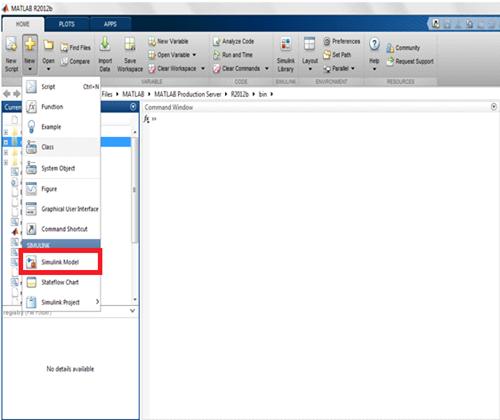
Рисунок 3 - Процесс создания новой модели в Simulink
. Открываем библиотеку функциональных блоков "Simulink". Для этого кликнем левой
кнопки мыши на панели управления по иконке "Simulink Library" (рисунок 4).

Рисунок 4 - Процесс создания новой модели в Simulink
. В результате откроется меню библиотеки Simulink, главный вид которой представлен на
рисунке 5.
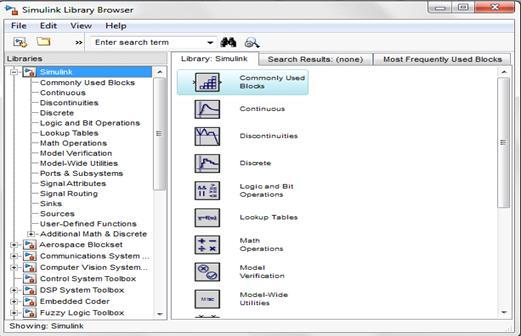
Рисунок 5 - Главное окно "Simulink Library"
4. Извлекаем из библиотеки Simulink все необходимые функциональные блоки. Для этого воспользуемся поиском, в
верхней панели окна "Simulink Lybrary
Browser", который представлен на
рисунке 6.
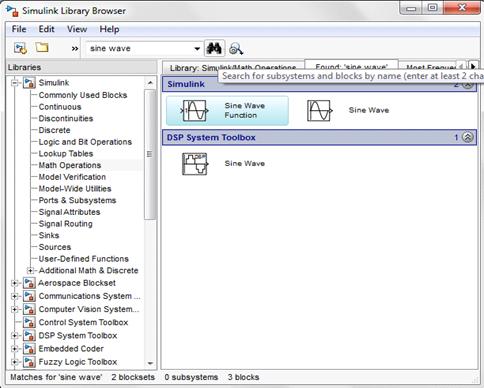
Рисунок 6 - Поиск блока в "Simulink Library"
. Для моделирования непрерывной системы контроля нам будут необходимы
следующие блоки:
- блоки "Sine Wave",
"Step" и "Random number"
с вкладки "Sources";
три блока "Subsystem" и блок "Scope" с вкладки "Commonly Used
Blocks";
блок
"Sum" с вкладки "Math Operations";
блок
"Fcn" с вкладки "User Define Function";
блок
"State-space" с вкладки "Continuous".
6. Cоберем схему верхнего уровня модели
непрерывной системы контроля (рисунок 7), используя перечисленные в п.5
функциональные блоки:
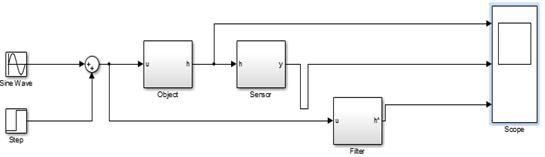
Рисунок 7 - Схема верхнего уровня системы контроля
. Рассмотрим более подробно блоки "Subsystem": "Object", "Sensor", "Filter".
8. Блок "Object" является объектом наблюдения системы и
представляет собой динамическую систему, в которой содержится стохастический
процесс (блок "State-Space") и датчик (блок "State-Space 1"). Функциональная схема динамической системы
"Object"
представлена на рисунке
8.

Рисунок 8 - Динамическая система "Object"
. Настройка блоков уравнения состояния "State-Space"
и "State-Space 1" представлена на рисунках 9 и 10
соответственно.

Рисунок 9 - Настройка параметров блока "State-Space"

Рисунок 10 - Настройка параметров блока "State-Space
1"
10. Функциональные блоки h(t)=C0X и g(u)=CgX,
заданы функциями, представленными в окне параметров (рисунок 11).

Рисунок 11 - Настройка функциональных блоков h(t) и g(u)
. Блок "Sensor"
(датчик) производит измерение входного сигнала и представляет собой
совокупность полезного сигнала h(t) и помехи n(t):
y(t)=h(t)+n(t).
Модель датчика представлена на рисунке 12. Блок "Random Number" используется в качестве генератора белого шума
с интенсивностью 0,4.
Рисунок 12 - Модель датчика (Sensor)
12. Блок "Filter"
(фильтр) на основе измерений датчика выдает оценку выходного параметра объекта
наблюдения - h^(t). Матрицы A, B, C соответствуют матрицам полной модели. Матрица С в блоке
"State Space" - единичная. Модель фильтра представлена на
рисунке 13.

Рисунок 13 - Модель фильтра (Filter)
Настройка параметров блока "State Space" и функционального блока f(u) представлена на рисунке 14.
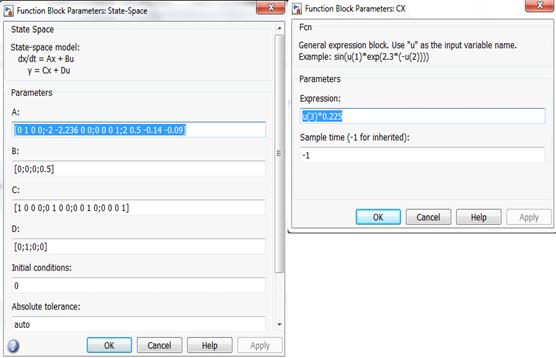
Рисунок 14 - Настройка параметров блоков "State-Space"
и "f(u)"
. Результаты процессов системы регистрируются осциллографом (блок "Scope"). Произведем настройку
параметров блока "Scope".
Для этого кликнем правой кнопкой мыши по блоку и выберем в диалоговом окне
пункт "Block Parametres" (параметры блока). Далее в
области появившегося окна кликнем правой кнопкой мыши и выберем пункт "Axes properties" (рисунок 15). В появившемся
диалоговом окне зададим область значений (Y) для каждого из трех графиков (рисунок 16).
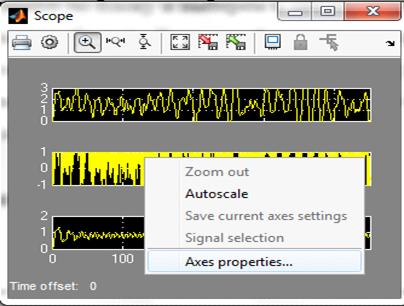
Рисунок 15 - Настройка параметров блока "Scope"

Рисунок 16 - Настройка области значений Y
. На панели инструментов Matlab
в верхней части экрана можно настроить число рабочих тактов системы, по
окончании которых работа Matlab
прекратится. Настройка данного параметра представлена на рисунке 17.

Рисунок 17 - Настройка рабочих тактов системы
. На этом настройка модели непрерывной системы контроля завершена. Далее
запустим систему, кликнув левой кнопкой мыши по иконке "Run" на панели инструментов в
верхней части экрана (рисунок 18).
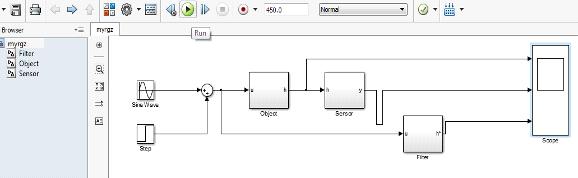
Рисунок 18 - Запуск системы на выполнение
. Результаты работы системы отражаются в блоке "Scope" и приведены на рисунке 19.

Рисунок 19 - Результаты работы системы
2.2 Выполнение задания 2
Колебания нелинейного осциллятора описываются следующим уравнением:
 .
.
Используя
данное дифференциальное уравнение, необходимо:
.
Создать модель механической системы;
.
Вычислить числовое значение координаты осциллятора в момент времени t=5 и
вывести результат на display;
.
Построить графики зависимости координаты и скорости от времени;
.
Построить фазовую траекторию системы.
Запишем
исходное уравнение в виде системы уравнений первого порядка.


Решим эту систему с помощью пакета Simulink, составляя блочную модель. Отдельным
блоком в общей модели сформируем подмодель (блок Subsystem):
 (библиотека Ports & Subsystems).
(библиотека Ports & Subsystems).
) уменьшает количество одновременно
отображаемых блоков на экране, что облегчает восприятие модели;
) позволяет создавать и отлаживать фрагменты
модели по отдельности, что повышает технологичность создания модели;
) дает возможность синхронизации параллельно
работающих подсистем.
Используя
созданную подмодель, значения  и
и  в основной модели связываем с соответствующими
входами подмодели, а выход подмодели связываем с сумматором. Сигнал с выхода
сумматора подаем на вход первого интегратора, замыкая цепь интегрирования.
в основной модели связываем с соответствующими
входами подмодели, а выход подмодели связываем с сумматором. Сигнал с выхода
сумматора подаем на вход первого интегратора, замыкая цепь интегрирования.
В
Simulink описанная процедура представлена на рисунках 20 и 21:
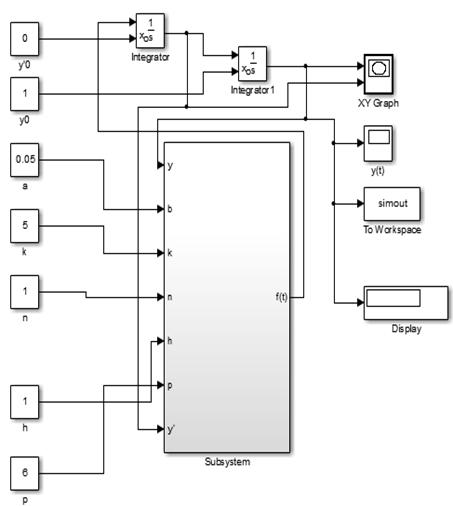
Рисунок
20 - Основная модель

Рисунок
21 - Подмодель
Если
дважды щелкнуть мышью на блоке Scope (y(t)) в
блок-схеме осциллятора, то появится графическое окно с графиком зависимости
координаты y от времени. Результат показаний блока "Scope"
представлен на рисунке 22.
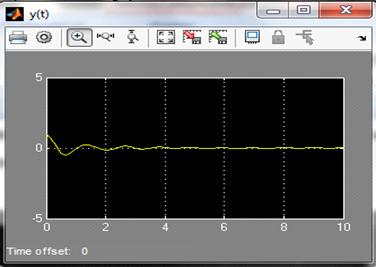
Рисунок
22 - Показания блока Scope
В
данной модели для построения фазовой траектории системы используется блок  - графопостроитель, который строит график одного
сигнала в функции другого (график вида Y(X)).
Блок имеет два входа. Верхний вход предназначен для подачи сигнала, который
является аргументом (X), нижний вход - для подачи значений функции (Y).
Зависимость X от Y представлена на рисунке 23.
- графопостроитель, который строит график одного
сигнала в функции другого (график вида Y(X)).
Блок имеет два входа. Верхний вход предназначен для подачи сигнала, который
является аргументом (X), нижний вход - для подачи значений функции (Y).
Зависимость X от Y представлена на рисунке 23.
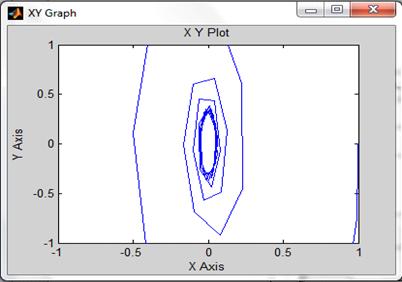
Рисунок
23 - Зависимость X от Y
Заключение
При выполнении данной работы были решены следующие задачи:
) смоделирована непрерывная система контроля на основе матричной модели
объекта наблюдения;
) получена и построена передаточная функция формирующего фильтра входного
процесса;
) составлена и построена матричная модель датчика и функция выхода для
объекта наблюдения;
) на основе дифференциальных уравнений процесса и объекта контроля
сформировано полное уравнение объекта контроля;
) построены графики для выходного параметра фильтра h(t), для выхода объекта наблюдения h(t) и выхода
датчика (сенсора) y(t);
) спроектирована модель механической системы;
) построен график зависимости координаты и скорости от времени, а также фазовая
траектория системы.
Список использованных источников
1. Волков,
В.Л. Моделирование процессов и систем. Учеб. пособие /В.Л. Волков. -
Н.Новгород; НГТУ, 1997. -80 c.
. Лебедев,
А.Н. Моделирование в научно-технических исследованиях. - М.: Радио и связь,
1989.
. Прохоров,
С.А. Математическое описание и моделирование случайных процессов. - Самара.
Самарский гос. аэрокосм. ун-т, 2001. -209 с.
. Моделирование
процессов и систем. Стохастические и детерминированные динамические системы и
информационные процессы. Лабораторные работы. Методические Указания / Сост:
Волков В.Л., Гущин О.Г., Поздяев В.И. - Н.Новгород. НГТУ, 1998. -32 c.