Моделирование систем
Задание
. Получить математическую
модель в операторной форме.
. Получить математическую
модель в форме дифференциального уравнения.
. Получить математическую
модель в пространстве состояний.
. Построить граф системы.
. Оценить устойчивость,
управляемость, наблюдаемость САУ.
. Построить графики АЧХ, ФЧХ,
АФЧХ замкнутой САУ.
. Построить переходную
характеристику САУ, оценить быстродействие системы.
1. Для заданной передаточной функции
W(p) =  получим
математическую модель в операторной форме:
получим
математическую модель в операторной форме:


уравнение в операторной
форме.
. Для заданной
передаточной функции
W(p) = получим
математическую модель в форме диф-го уравнения.
Вход - выходное описание
в форме дифференциального уравнения. pn
=

уравнение в операторной
форме.
. Модель в пространстве
состояния.
W(p) = получим
математическую модель в пространстве состояния:
Заданной передаточной
функции соответствует дифференциальное уравнение:

Выразим U, Y через переменную z
Введём замену переменной
граф математический
модель управление



Y=
200 х1 + 40 х2
Запишем уравнения
состояний в матричной форме:
где
A= B=
B=
C= D=
D=
Полученные уравнения -
математическая модель в пространстве состояний.
4. Построим граф системы по полученной модели в
пространстве состояний.
Вершины графа -
переменные х1, х1', х2, х2', х3,
х3', входной сигнал U(t), выходной сигнал Y(t). Связи между переменными изображаются в виде дуг с
проставленными коэффициентами при переменных.


U(t)
Y(t)
5. Оценим устойчивость,
управляемость, наблюдаемость САУ.
Введем коэффициенты
характеристического уравнения по передаточной функции

Вычислим корни характеристического
уравнения:

rt =- 41.3374
.3313 +14.9383i
.3313 -14.9383i
Вещественные части корней уравнения
имеют отрицательный знак, следовательно, система устойчива.
Для оценки управляемости системы
построим матрицу управляемости R:

Вводим матрицу A:
>> a=[0 1 0; 0 0 1; -100/0.01 -6/0.01 -0.5/0.01]
Вводим матрицу B:
>> b=[0; 0; 1/0.01]
Находим матрицу
управляемости:
>> r=[b
a*b a*a*b]
>> rg=rank(r)g
= 3
Ранг матрицы
управляемости равен n, следовательно, система
управляема.
Для оценки наблюдаемости
системы построим матрицу наблюдаемости Q:

Транспонируем матрицу A:
>> at=a'
Вводим матрицу C:
>> c=[1 0 0]
Транспонируем матрицу C:
>> ct=c'
Определяем матрицу
наблюдаемости:
>>
q=[ct
at*ct at*at*ct]
Определяем ранг матрицы
наблюдаемости:
>> rg=rank(q)
rg
= 3
Ранг матрицы
наблюдаемости равен n, следовательно, система
наблюдаема.
. Построить графики АЧХ,
ФЧХ, АФЧХ, переходной характеристики
Для построения частотных
характеристик используем MatLab.
Введем передаточную функцию
>> w=tf([40 100], [0.01 0.5 6
150])
40 s + 100-0.01 s^3 +
0.5 s^2 + 6 s + 150
Для построения АЧХ, ФЧХ используем
команду bode:
>> bode(w)

Рис.
1. ЛАЧХ, ЛФЧХ
График АФЧХ строится по передаточной
функции командой nyquist.
>> nyquist(w)
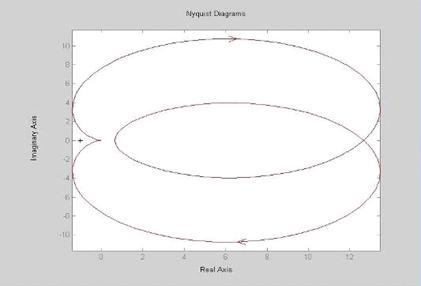
Рис. 2. Годограф АФЧХ
Переходную характеристику построим с
помощью команды step:
>>step(w)
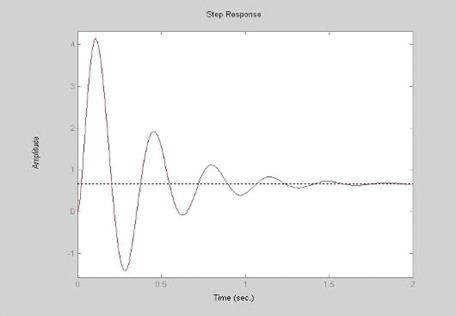
Рис. 3. График переходной
характеристики.
По графику переходной характеристики
определим время переходного процесса - 1.7 сек.