Об одном способе экспериментального определения гидродинамических параметров поплавкового маятникового акселерометра
Об одном способе экспериментального определения
гидродинамических параметров поплавкового маятникового акселерометра с
электростатическим подвесом
Васюков С. А.
В
поплавковых маятниковых акселерометрах, работающих в компенсационном режиме,
подвижная система содержит два цилиндрических поплавка, которые служат для
обеспечения гидростатической разгрузки. Поверхности поплавков могут быть
использованы в качестве роторов электростатических подвесов, выполняющих роль
дополнительных прецизионных элементов центрирования подвижной системы.
В
отличие от вакуумных подвесов, в поплавковых физическое демпфирование
реализуется посредством вязкой жидкости, что облегчает достижение устойчивого
взвешивания. Подвижная система, охваченная обратной связью по измерительной
оси, практически не совершает разворотов вокруг этой оси. Конечно, и в этом
случае имеет место воздействие электростатического подвеса на точностные
характеристики прибора через возмущающий момент на измерительной оси, однако
возможность высококачественного изготовления цилиндрического ротора подвеса
существенно снижает влияние этого момента и делает его вклад в уравнения
движения вокруг этой оси пренебрежимо малым.
Задача
по определению гидродинамических сил и моментов, которые действуют на
цилиндрический поплавок при его движении в вязкой жидкости, наиболее полно
исследована в работе Никитина Е. А. [1]. Математическая модель, рассмотренная в
[1], представляла собой связанную задачу гидродинамики, включающую в себя
задачу гидродинамики в цилиндрической щели и две разные задачи гидродинамики в
торцевых щелях, состоящие из уравнений Навье-Стокса и неразрывности. К ним
добавлялись условия согласования давления и расхода жидкости при переходе из
цилиндрической щели в торцевую щель и соответствующие граничные условия.
Известно,
что гидродинамическую силу можно представить в виде
 (1)
(1)
где
 и
и  присоединенная масса и коэффициент
линейного демпфирования. В [1] были получены аналитические выражения для
осевого (2) и радиального (3) движений поплавка
присоединенная масса и коэффициент
линейного демпфирования. В [1] были получены аналитические выражения для
осевого (2) и радиального (3) движений поплавка
 (2)
(2)
 (3)
(3)
где
 - динамическая
вязкость,
- динамическая
вязкость,  - плотность
жидкости,
- плотность
жидкости,  ,
,  ,
,  ,
,  - размеры поплавкового узла, рис. 1.
- размеры поплавкового узла, рис. 1.
Экспериментальные
исследования на опытных образцах приборов с электростатическими подвесами
показали, что времена центрирования (всплытия с упоров) поплавковых узлов
значительно меньше, чем расчетные с использованием выражений (2) и (3). Это
можно объяснить завышенными расчетными значениями коэффициентов демпфирования.
Попытка
уточнения коэффициентов демпфирования, присоединенных масс и моментов инерции
для конструкций с малыми (порядка 50 мкм) зазорами была предпринята в работе
[2]. Однако в этом случае расчетные соотношения отличались от экспериментальных
значений в 2 – 3 раза в меньшую сторону.
В
ряде работ С. А. Анциферова и Л. И. Могилевича, в частности в [3] произведено
уточнение значений гидродинамических сил за счет учета несимметричного
истечения жидкости в торцевые щели.
Чем
же можно объяснить значительное расхождение теоретических и экспериментальных
результатов. Очевидно тем, что в расчетных моделях рассматривалось идеализированное
движение цилиндрического поплавка в цилиндрической камере, и было невозможно
учесть сложность конкретных конструкций поплавковых узлов и наличие
дополнительных каналов перетекания жидкости.
В
связи с этим, более достоверными оказываются данные об этих параметрах,
полученные при испытаниях опытных образцов приборов. Ниже предлагается способ
экспериментального определения коэффициентов углового и линейного демпфирования
при воздействии принудительной знакопеременной силы в электростатическом подвесе.
Пусть
система электродов цилиндрического электростатического подвеса ориентирована
относительно правой ортогональной системы координат, как показано на рис. 1.
Введем
неподвижную систему координат  , жестко скрепленную с корпусом прибора, начало
которой помещено в центре подвеса, и подвижную
, жестко скрепленную с корпусом прибора, начало
которой помещено в центре подвеса, и подвижную  , скрепленную с поплавком. Тогда уравнения
движения цилиндрического ротора, взвешенного в жидкости, с учетом допущений,
продиктованных условиями работы поплавковых маятниковых приборов, примут вид:
, скрепленную с поплавком. Тогда уравнения
движения цилиндрического ротора, взвешенного в жидкости, с учетом допущений,
продиктованных условиями работы поплавковых маятниковых приборов, примут вид:

Рис.
1
 (4)
(4)
б)
для вертикального положения оси прибора
 (5)
(5)
где
 - силы и моменты
электростатического подвеса,
- силы и моменты
электростатического подвеса,
 - гидродинамические силы и
моменты,
- гидродинамические силы и
моменты,
 - возмущающие силы и
моменты,
- возмущающие силы и
моменты,
 - архимедова сила,
- архимедова сила,  - момент маятника,
- момент маятника,  - момент дифферента,
- момент дифферента,
 - момент, создаваемый
системой обратной связи вокруг измерительной оси прибора.
- момент, создаваемый
системой обратной связи вокруг измерительной оси прибора.
Для
дальнейшего анализа уравнений движения необходимо представить силы и моменты в
правых частях уравнений (4) и (5) в форме, раскрывающей их зависимость от
линейных и угловых координат.
Для
оценки величины линейного демпфирования рассмотрим уравнение движения поплавка
по оси y только под действием электростатической силы и остаточного веса:
 (6)
(6)
где
 - полная (с учетом
присоединенной) масса,
- полная (с учетом
присоединенной) масса,  -
остаточный вес (неплавучесть).
-
остаточный вес (неплавучесть).
Перед
началом эксперимента проведем центрирование в электростатическом подвесе так,
чтобы выставить в среднее положение цапфы поплавков в камниевых опорах, рис. 1.
Другими словами, с помощью подвеса обеспечивается одинаковый зазор  между поверхностью цапфы и
верхним и нижним камниевым упором. Введем в канал y подвеса низкочастотный
периодический сигнал, заставляющий поплавок совершать принудительные движения
от верхнего упора к нижнему упору и наоборот. Как видно из рис. 2, при движении
в одном направлении сила подвеса складывается с силой остаточного веса,
между поверхностью цапфы и
верхним и нижним камниевым упором. Введем в канал y подвеса низкочастотный
периодический сигнал, заставляющий поплавок совершать принудительные движения
от верхнего упора к нижнему упору и наоборот. Как видно из рис. 2, при движении
в одном направлении сила подвеса складывается с силой остаточного веса,
а
при движении в другом направлении вычитается.

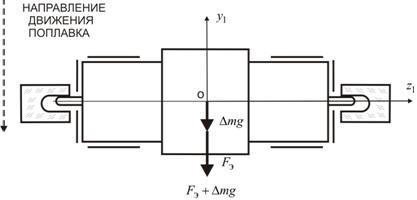
Рис.
2
Так
как полный ход цапфы от упора до упора  мал (порядка 5 мкм), то можно считать силу,
создаваемую подвесом на всем участке принудительного движения постоянной, и в
этом случае решение уравнения (6) принимает вид
мал (порядка 5 мкм), то можно считать силу,
создаваемую подвесом на всем участке принудительного движения постоянной, и в
этом случае решение уравнения (6) принимает вид
 (7)
(7)
Пренебрегая
малой постоянной времени  ,
запишем
,
запишем
На
рис. 3 схематично показано принужденное движение поплавка от нижнего упора к
верхнему за время  и в
обратном направлении за время
и в
обратном направлении за время  . Полный ход при этом равен .
. Полный ход при этом равен .
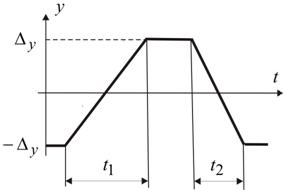
Рис.
3
Из
(8) при соответствующих начальных условиях можно найти
 (9)
(9)
Уравнения
(9) могут быть разрешены или относительно , или относительно  .
.
 (10)
(10)
Методики
определения остаточного веса для температуры при которой проводился эксперимент
(при известной температуре балансировки подвижной системы) хорошо известны.
Следовательно, измеряя времена  и , можно вычислить
и , можно вычислить  . Вычисления
. Вычисления  возможны также, если рассчитать силу подвеса . Так, для импульсного
электростатического подвеса с опорным напряжением на электродах
возможны также, если рассчитать силу подвеса . Так, для импульсного
электростатического подвеса с опорным напряжением на электродах  , измерения через остаточную неплавучесть при
, измерения через остаточную неплавучесть при  , дали результат,
, дали результат,

А
вычисления через силу подвеса показали

При
измерениях демпфирования по оси x (не весовая ось) при

 , что дает хорошее совпадение результатов.
, что дает хорошее совпадение результатов.
Измерения,
проведенные для осевого канала z, при выставке оси z как весовой, показали

Если
же ось z не весовая, то 
Для
нахождения углового демпфирования ось подвеса z устанавливается в вертикальное
положение и к поплавку прикладывается знакопеременный принуждающий
электростатический момент. Здесь, так же как и в предыдущем случае,
устанавливается разность интервалов времени и , причем в интервале момент электростатических сил складывается с
моментом маятника, а в интервале их величины вычитаются
где
 и
и  - момент маятника и угловой люфт
цапфы поплавка.
- момент маятника и угловой люфт
цапфы поплавка.
Переходные
процессы, вычисленные по уравнениям движения с учетом демпфирований,
определенных по вышеприведенной методике, с хорошей степенью точности (порядка
10%) совпадают с экспериментальными результатами. Это позволяет сделать вывод о
возможности и правомерности применения данной методики при исследовании
динамики поплавковых приборов.
1.
Никитин Е. А., Пилюгина Н. Н. Гидродинамические силы и моменты, действующие на
поплавок при его движении относительно поплавковой камеры. Труды МВТУ им. Н. Э.
Баумана. – 1982. - № 372.-С. 4-25.
2.
Васюков С. А., Грибова С. Н., Дробышев Г. Ф. Наклономер с электростатическими
опорами. Труды МВТУ им. Н. Э. Баумана. – 1985. - № 485.-С. 82.
3.
Анциферов С. А., Могилевич Л. И. Гидродинамические силы, действующие на
поплавок маятникового акселерометра при несимметричном истечении жидкости.
Авиакосмическое приборостроение.-2003.-№11.-С.19-26.
Для
подготовки данной работы были использованы материалы с сайта http://www.techno.edu.ru