Расчет продольной центровки вертолета методом моментов
Задание
. Расчет продольной центровки вертолета Ми-2
перед взлетом и посадкой:
а) нарисовать схему грузовой кабины указать
расстояния от оси НВ к объектам влияющих на центровку вертолета:
Масло 40 кг - (+0,26 м)
Пилот - (+1,8 м)
Сиденье рядом - (+1,6 м)
Передний ряд сидений - (+0,7 м)
Задний ряд сидений - на центровку не влияет
Рядом с задней дверью - (-1,3 м)
Основной топливный бак - (+0,44 м)
Левый дополнительный - (+0,6 м)
Правый дополнительный - (+0,15 м)
б) Рассчитать количество топлива в баках перед взлетом
и посадкой с учетом того, что емкость основного бака 600л - 480кг, в
дополнительных 238л - 190кг, топливо заправляется в основной, а если не влезает
то в дополнительные, равномерно в оба бака;
в) В соответствии с вариантом разместить в
вертолете пассажиров и груз (по возможности разместить рядом с задней дверью) и
выполнить расчет продольной центровки перед взлетом и посадкой с учетом времени
полета; вес пассажира - 75 кг;
г) Если рассчитанная центровка вышла за
ограничение, перераспределить пассажиров и груз и вновь рассчитать центровку.
. Аэродинамический обоснование действий пилота
при отказе двух двигателей:
) поведение вертолета при отказе двух
двигателей;
) действия пилота при отказе двух двигателей с
запасом высоты, схемы посадок;
) физическая сущность самовращения НГ по теории
элемента лопасти;
) аэродинамические характеристики полета на
режиме самовращения;
) силы и моменты действующие на вертолет на
постоянном снижении на авторотации, их обоснование и схемы;
Введение
Центровка вертолёта - под центровкой вертолёта
понимается положение его центра масс относительно оси и плоскости вращения НВ.
Центровка оказывает большое влияние на равновесие вертолёта.
Она характеризуется тремя координатами:т -
(продольная центровка) (рис. 1) - расстояние от центра масс до поперечной
плоскости проходящей через ось вала НВ. Продольная центровка считается передней
(положительной), если центр масс расположен впереди оси вала НВ, и задней
(отрицательной) - если позади.т - (вертикальная центровка) (рис. 2) - расстояние
от центра масс вертолёта до плоскости вращения втулки НВ. Центр масс всегда
ниже плоскости вращения втулки НВ и поэтому она всегда отрицательная.т -
(боковая центровка) (рис. 3) - расстояние от центра масс до плоскости симметрии
вертолёта, она положительна, если центр масс находится справа от плоскости
симметрии.
Изменение величин вертикальной и боковой
центровок незначительно влияют на равновесие и балансировку вертолёта.
Продольная центровка может значительно изменяться в зависимости от расположения
груза, пассажиров и топлива. Эти изменения могут привести к невозможности
управления вертолётом и поэтому её пределы ограничиваются. Для вертолёта Ми- 2
передняя центровка не более (+185мм), а задняя (-10мм). В полёте по мере
выработки топлива продольная центровка изменяется, но она не должна выходить за
ограничения.

Рис. 1 - Центровка вертолёта

Рис. 2 - Центровка вертолёта
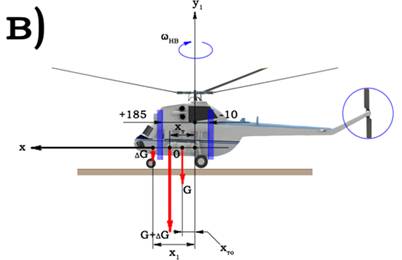
Рис. 3 - Центровка вертолёта
Расчет продольной центровки
вертолета Ми-2 перед взлетом и посадкой
Расчёт продольной центровки выполняется методом
расчёта моментов или по номограмме, которая находится в РЛЭ вертолёта Ми - 2.
Для расчёта методом моментов необходимо с помощью технической документации
узнать вес пустого вертолёта (сухой вес) G и положение его центра тяжести Xто.
Так как на вертолете Ми-2 топливные баки находятся не в плоскости оси НВ, то
вес топлива в баках, вес экипажа и груза будут смещать центровку вертолёта
вперёд или назад. Эти изменения можно рассчитать.
Из условия равновесия
(G+GΔ)Xт = G·Xтo + ΔG·X1,2,3…
где:
- вес пустого вертолёта;
ΔG - вес груза, экипажа,
пассажиров, топлива масла;тo- центровка пустого вертолёта;,2,3,4… - расстояние
от оси НВ до центра массы груза, экипажа, пассажиров, топлива масла; т -
центровка вертолёта с грузом
тогда
|
Xт
=
|
G·Xтo
+ ΔG·X1,2,3,4
|
|
G
+ ΔG
|
Расчет центровки перед вылетом:



Расчет центровки перед посадкой:


2. Аэродинамическое обоснование
действий пилота при отказе двух двигателей
) Отказ двух двигателей. Физическая сущность
самовращения НВ.
Режимом самовращения НВ называется такой режим
при котором НВ приводится во вращении аэродинамическими силами, возникающими в
результате взаимодействия лопастей с набегающим потоком воздуха т. е. без
подвода мощности от двигателя.
Вращающийся винт создаёт в 8-10 раз больше
сопротивление чем остановленный. Снижение вертолёта на режиме вращения НВ по
вертикали называется парашютированием, а по наклонной траектории -
планированием.
Для понимания физической сущности вращения НВ на
режиме самовращения (авторотации) используем теорию элемента лопасти (рис.4).
Через центр давления элемента лопасти проведём три прямых:
а - ось вращения, перпендикулярна плоскости
вращения с;
в - перпендикулярно хорде элемента лопасти;
у - перпендикулярно вектору результирующего
потока воздуха Vэф.;
Угол между линиями «у» и « в» и угол атаки α
равны
между собой, так как образованы взаимно перпендикулярными сторонами. На том же
основании угол между линиями «а» и «в» равен установленному углу φ.
В
центре давления элемента лопасти приложен вектор полной аэродинамической силы
Rэ. разложим его на подъёмную силу Уэ и силу лобового сопротивления Хэ в
скоростной системе координат. Угол между векторами Уэ и Rэ это угол качества θ.
Угол
между вектором Rэ и линией b равен разнице углов α - θ.
Если α- θ <
φ то:
φ - (α - θ) = γ
где:
γ - угол отклонения
вектора Rэ от оси вращения НВ.
Это означает, что вектор Rэ отклонен от оси
вращения НВ назад, проекция вектора Rэ на плоскости вращения ∆Q
направлена назад и образует тормозящий момент, который уменьшает частоту
вращения НВ - режим замедленного самовращения. Чем больше φ
тем
больше γ,
тем больше тормозящий момент.
Если α - θ >
φ то:
φ - (α - θ) = - γ
Это означает, что вектор Rэ отклонён вперед от
оси вращения НВ, проекция на плоскость вращения ∆Q направлена вперёд и
образует крутящий момент, который ускоряет вращение НВ - режим ускоренного
самовращения.Чем меньше φ тем больше
наклон Rэ вперёд, тем с большей скоростью вращается НВ.
Если α - θ =
φ
то:
φ - (α - θ) = 0
Это значит, что вектор Rэ направлен параллельно
оси вращения НВ и его проекция на плоскость вращения равна нулю ∆Q = 0.
Крутящий и тормозящий момент отсутствуют, винт вращается с постоянной частотой
вращения НВ - установившийся режим.
Для устойчивого самовращения НВ необходимо
уменьшить установочный угол φ, увеличить
угол атаки α и иметь хорошее
качество профиля (чем меньше угол качества, θ тем
лучше качество профиля).

Рис. 4 - Условия самовращения элемента лопасти:
а) замедленное вращение; б) ускоренное вращение; в) установившиеся вращение
Если элемент лопасти находится в условиях точки
А1 (частота вращения НВ постоянная) и отклонить РЦШ «к себе» т. е. увеличить
угол атаки до 8о (точка А11’) то элемент лопасти попадёт в область ускоренного
самовращения, а если РЦШ отклонить «от себя», то есть уменьшить угол атаки до
2о(точка А111), то элемент лопасти попадёт в область замедленного самовращения.
Если рассмотреть лопасть НВ, то мы увидим, что
элементы лопасти находятся в различных условиях самовращения. Угол атаки
зависит не только от вертикальной скорости снижения, но и от окружной скорости
элементов лопасти. У концевых элементов окружная скорость значительно больше
чем у корневых, следовательно, и угол атаки у концевого элемента меньше чем у
корневого. Но тогда у концевых элементов Rэ наклонены назад и их проекции,
образуют тормозящие моменты (рис. 6) т. е. они работают в режиме замедленного
самовращения. Тормозящие действия концевых элементов уменьшаются геометрической
круткой лопасти, но полностью не устраняются.
У корневых элементов лопасти окружная скорость
намного меньше, угол атаки элементов больше, Rэ наклоны вперёд их проекции
образуют крутящий момент, т. е. они работают в режиме ускоренного самовращения.
При уменьшении шага НВ и увеличении вертикальной
скорости снижения, тормозящие действия концевых элементов уменьшаются, а при
увеличении шага НВ - увеличивается.
При планировании вертолёта на режиме
самовращения НВ лопасти обтекаются потоком воздуха несимметрично, лопасти
совершают маховые движения. В результате углы атаки меняются в зависимости от
азимутального положения лопасти. При взмахе лопасти вверх в азимуте 90оуглы
атаки будут уменьшаться, а при взмахе вниз в азимуте 270о - увеличиваться. В
результате этого в азимуте 90олопасть будет работать в условиях замедленного
самовращения, в азимуте 270о - ускоренного самовращения, а азимуте 0-180о -
установившегося самовращения.
Для установившегося самовращения НВ необходимо
чтобы лопасти создавали крутящий момент, который бы смог преодолеть момент
трения в трансмиссии и момент сопротивления РВ.

Рис. 5 - График запаса самовращения элемента
лопасти
Рис. 6 - Условия самовращения различных
элементов лопастей
Поведение вертолёта при отказе двух
двигателей
При внезапном отказе двух двигателей резко
уменьшается частота вращения НВ и турбокомпрессоров двигателей, изменяется
уровень шума. Вертолёт раз балансируется аналогичного как при отказе одного
двигателя, но разбалансировка более энергичная.
Вертолёт разворачивается вправо
Причина. Исчезает реактивный момент НВ,
появляется увлекающий момент вправо за счёт трения в подшипниках, а тяга РВ
уменьшается медленнее.
Вертолёт кренится вправо
Причина. Тяга РВ кренящая вертолёт влево
уменьшается, а конус НВ заваливается вправо из-за увеличения угла атаки НВ при
снижении и уменьшении частоты вращения НВ.
Вертолёт опускает нос
Причина. Индуктивный поток от НВ исчез,
стабилизатор стал обдуваться не сверху, а снизу, создаётся пикирующий момент.
Вертолёт снижается
Причина. К НВ перестала подводиться мощность,
уменьшается частота вращения НВ.
) Действия пилота при отказе двух двигателей в
полёте с запасом высоты.
При внезапном отказе двух двигателей пилоту
необходимо:
Устранить разбалансировку вертолёта:
с помощью рычагов управления предотвратить
разворот и крен вправо и опускании носа.
Предотвратить уменьшение частоты НВ:
уменьшить шаг НВ до минимального - перевести
вертолёт на режим самовращения НВ;
отклонить РЦШ «к себе» чтобы увеличить угол
атаки НВ, при скорости более 100 км/ч, РЦШ отклонять «к себе» до скорости
70-100 км/ч, а при скорости 70-100 км/ч - до уменьшения скорости на 15-20 км/ч;
рычагом «шаг-газ» установить частоту вращения НВ
- 80-84%.
Установить наивыгоднейшую скорость полёта:
для получения минимальной вертикальной скорости
снижения 7,5-8 м/с, установить скорость полёта 100 км/ч;
для получения максимальной дальности
планирования установить скорость полёта 140 км/ч.
Предотвратить возникновение пожара:
прекратить подачу топлива в двигатель с помощью
стоп-кранов;
закрыть пожарные краны обоих двигателей.
Выполнить посадку на режиме самовращения НВ:
) При наличии ровной площадки длинной не менее
150 м. с открытыми подходами выполняется посадка с пробегом:
после расчёта на посадку против ветра с высоты
100-150 м. установить скорость 90-100 км/ч, расчёт на посадку уточнять
изменением скорости;
на высоте 20-30 м. взятием РЦШ «к себе» начать
плавное гашение скорости;
на высоте 15-20 м. начать увеличение шага НВ с
таким расчётом, чтобы к моменту приземления вертикальная скорость составляла не
более 0,5-1 м/с, а поступательная - 60-30 км/ч;-
на высоте 2-4 м. отклонением РЦШ «от себя»
создать вертолёту посадочное положение;
приземление выполнить на основные колёса шасси с
последующим опусканием на передние;
после приземления для уменьшения пробега
использовать тормоза колёс и при необходимости торможение несущим винтом
отклонив РЦШ «к себе», при шаге НВ не менее 4-6ْ.
) При наличии ровной площадки длинной менее 150
м. выполняется посадка с коротким пробегом:
после расчёта на посадку против ветра с высоты
100-150 м. установить скорость 90-100 км/ч, расчёт на посадку уточнять
изменением скорости;
на высоте 30-40 м. взятием РЦШ «к себе» начать
гашение скорости увеличив тангаж на 10-150 с одновременным увеличением шага НВ
на 1,5-20, так чтобы на высоте 10-15 м. скорость была 20-40 км/ч;
на высоте 15-20 м. выполнить энергичный «подрыв»
общего шага НВ движением рычага «шаг-газ» вверх с нарастающим темпом за время
2-4 сек., с таким расчётом, чтобы на высоте 0,5-1 м. вертикальная скорость была
близка к нулю, а поступательная - менее 30 км/ч;
на высоте 2-4 м. отклонением РЦШ «от себя»
создать вертолёту посадочное положение;
приземление выполнить на основные колёса шасси с
последующим опусканием на передние;
после приземления для уменьшения длинны пробега
использовать тормоза колёс и при необходимости торможение несущим винтом,
отклонив РЦШ «к себе» при шаге НВ не менее 4-60.
) При отсутствии ровной площадки, когда пилот
вынужден производить посадку на пересечённую местность выполняется посадка без
пробега:
после расчёта на посадку против ветра с высоты
100-150 м. установить скорость 70-80 км/ч, расчёт на посадку уточнять
изменением скорости;
на высоте 20-25 м. увеличить тангаж на 15-200;
на высоте 10-15 м. выполнить энергичный «подрыв»
общего шага НВ, вплоть до максимального, за время 1-2 сек.;
на высоте 3-5 м. отклонением РЦШ «от себя»
создать вертолёту посадочное положение;
приземление выполнить на основные колёса шасси
без пробега.

Рис. 7 - Посадка вертолёта Ми-2 на режиме
самовращения НВ: а) посадка с пробегом; б) посадка с коротким пробегом; в)
посадка без пробега
Физическая сущность самовращения НГ
(Теория элемента лопасти)
Импульсная теория не дает всей полноты понимания
сущности работы несущего винта на режиме самовращения, она только дает
понимание возникновения аэродинамической силы. Для определения аэродинамических
характеристик НГ и понимания сущности вращения лопастей НГ на режиме
авторотации используется теория элемента лопасти. Сущность этой теории состоит
в том, что лопасть НГ рассматривается состоящей из бесконечного числа
элементов, работа которых аналогична работе профиля крыла. Такое представление
лопасти НГ позволяет определять для каждого элемента лопасти характерные
скорости, углы и аэродинамические силы. Если рассмотреть элемент лопасти и на
режиме самовращения, то он имеет две скорости: окружную скорость U=w×r
и вертикальную скорость снижения. Сумма этих скоростей дает результирующую
скорость. Под действием обтекания лопасти воздушным потоком со скоростью
результирующего потока на элементах лопасти образуется полная аэродинамическая
сила элемента (Δ Ra). Она
может быть направлена относительно оси вращения втулки НГ под углом Ɣ
назад, параллельно оси вращения втулки и относительно оси втулки под углом Ɣ
вперед (рис. 8 а, б, в).
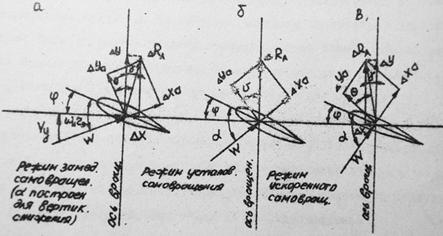
Рис. - 8 а, б, в
В первом случае проекция силы Δ
Ra
на плоскость вращения втулки направлена назад против вращения винта и образует
тормозящий момент, под действием которого частота вращения НГ уменьшается. Во
втором случае проекция силы Δ Ra
на плоскость вращения втулки равна нулю х=0. Следовательно, сила Δ
Ra
не оказывает тормозящего или ускоряющего или ускоряющего действия на вращения
несущего винта. В третьем случае проекция силы на плоскость вращения втулки х
направлена по вращению несущего винта и образует крутящий момент, под действием
которого частота вращения несущего винта увеличивается. На режиме самовращения
элемент лопасти может работать во всех трех режимах. Как видно, во всех трех
случаях элемент оказывает сопротивление набегающему потоку (сила Δ
Xa).
Зависимость наклона полной аэродинамической силы
элемента относительно оси вращения характеризует угол запаса самовращения
элемента Ɣᶟ, который является углом, связывающим углы установки,
атаки и качества
Чем больше установочный угол, тем больше наклон
вектора Δ
Ra
назад, тем больше создается тормозящий момент, который уменьшает частоту
вращения винта. Если угол установки элемента лопасти, равен разности угла атаки
минус угол качества, то элемент лопасти работает в режиме установившегося
самовращения, формулой это выражается так:
Увеличение аэродинамического качества
(уменьшение Ө) способствует самовращению.
Из рассмотренных примеров следуют выводы:
при уменьшении угла установки (шага) элемента
вектор силы отклоняется вперед и самовращение становится ускоренным;
при увеличении шага элемента лопасти вектор силы
отклоняется назад и самовращение становится замедленным.
Пользуясь полярой профиля и формулой, можно для
каждого угла атаки найти угол качества, а затем найти шаг, при котором элемент
работает в режиме установившегося самовращения. На основании данных можно
построить график запаса самовращения элемента лопасти.
Рис. 9
Из графика видно, что при постоянном шаге
увеличение угла атаки приводит к ускорению вращения, а увеличение шага, при
постоянном угле атаки к замедлению вращения. Таким образом, для перехода на
режим самовращения, шаг необходимо уменьшить. Взятие ручки циклического шага
«на себя» способствует ускорению вращения, т.к. увеличивается угол атаки
элемента.
Аэродинамические характеристики
полёта на режиме самовращения НВ
При полном отказе двух двигателей располагаемая
мощность равна нулю. Установившийся полёт возможен только со снижением.
Поскольку НВ на режиме самовращения создаёт подъёмную силу и силу
сопротивления, то движущий силой в этом случае является составляющая силы
тяжести вертолёта направленная вдоль траектории снижения.
Вертикальная скорость снижения зависит от
величины дефицита мощности по сравнению с потребной мощностью для ГП. С
увеличением полётной массы вертолёта, высоты полёта, температуры воздуха
возрастает дефицит мощности и вертикальная скорость снижения.
Дефицит мощности и вертикальная скорость
снижения зависят так же от скорости полёта (рис. 86а, б). Минимальная
вертикальная скорость снижения (7,5 - 8 м/с) и следовательно максимальная
продолжительность снижения получается при планировании на скорости 100 км/ч.
Наибольшая дальность планирования (минимальный угол планирования - θmin)
получается
на скорости 140 км/ч, но при этом вертикальная скорость будет больше чем на 100
км/ч - Vy = 8,5 - 9 м/с, а угол снижения в штиль составит 130.
Вертикальная скорость снижения так же зависит от
частоты вращения НВ (рис. 86в), минимальная вертикальная скорость снижения
получается при Nнв = 80%.
Минимальная потеря высоты при развороте на 1800
получается при полёте со скоростью 60 км/ч, с креном 20-30 0 и составляет 180
м.
Балансировка вертолета при установившемся
снижении отличается от балансировки при моторном снижении При продольной
балансировке подъемная сила стабилизатора Ycт. Направлена вверх. Боковая
балансировка существенно отличается т.к. исчез разворачивающий влево момент от
НВ и за счет трения появился разворачивающий момент вправо, который необходимо
уравновесить тягой РВ направив ее в противоположную сторону по сравнению с
моторным полетом. Чтобы снижение выполнялось без скольжения необходимо
уравновесить Трв отклонив конус вращения НВ влево для создания боковой силы Z.
Вращение НВ на снижении происходит за счет
потенциальной энергии вертолета, вертикальная скорость при этом значительная и
не обеспечивает безопасную посадку.
Для уменьшения вертикальной скорости перед
приземлением необходимо использовать кинетическую энергию вертолета увеличивая
тангаж и кинетическую энергию вращающегося НВ увеличивая шаг НВ.
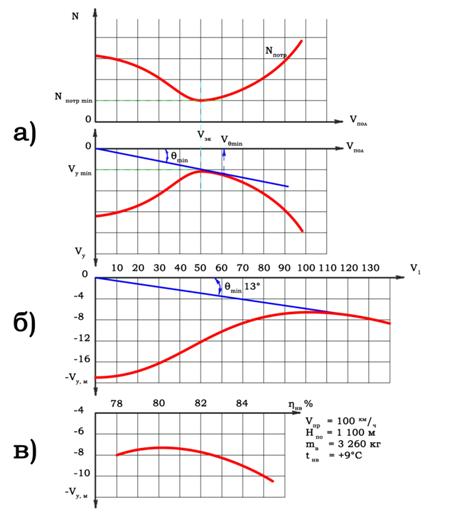
Рис. 10 - Аэродинамические характеристики полёта
на режиме самовращения НВ: а) Возможности вертолёта на планировании с двумя
неработающими двигателями; б) Траектория снижения с двумя неработающими
двигателями; в) Зависимость Vy от n нв
Силы и моменты, действующие на
вертолет на постоянном снижении на авторотации, их обоснование и схемы
вертолет взлет двигатель лопасть
При полном отказе двух двигателей располагаемая
мощность становится равной нулю.
Установившийся полет возможен только со
снижением. На (рис.11) показана схема сил, действующих на вертолет при
установившемся планировании на режиме самовращения (в скоростной системе
координат). Поскольку несущий винт на режиме самовращения создает подъемную
силу Yан и силу сопротивления Хан, то движущей силой в этом случае является
составляющая силы тяжести Gан, направленная вдоль траектории.
Рис. 11
Выводы
При выполнении расчётов продольной центровки
методом моментов необходимо было в соответствии с вариантом использовать вес
пустого вертолёта (сухой вес) G и положение его центра тяжести Xто, так как на
вертолете Ми- 2 топливные баки находятся не в плоскости оси НВ, то необходимо
также вес топлива в баках, вес экипажа и груза.
В процессе расчёта выбранное мной размещение
груза и пассажиров соответствуют требованию руководству. Центровка в приделах
нормы, не выходит за ограничения передняя центровка не более (+185мм), задняя
(-10мм).
Ознакомился с действиями экипажей при отказе
двух двигателей во время выполнения полёта, а также возможности вертолёта на
планировании с двумя неработающими двигателями.
Список использованной литературы
1. Гученко
Н.И. Динамика полета вертолета Ми-2 на режиме авторотации и в других особых
случаях. Киев, 1992.
2. Ромасевич
В.Ф. Аэродинамика и динамика полетов вертолетов М., Воениздат, 1982.
. Зозуля
В.Б. и др. Практическая аэродинамика вертолета Ми-2., Воздушный транспорт,
1984.