Изучение устройств для бесконтактного измерения вибрации
Оглавление
Введение
. Анализ области использования
виброметра и принципов измерения вибрации
1.1 Колебательные процессы
.2 Принципы измерения вибрации
.3 Обоснование выбора параметра,
подлежащего регистрации
2. Анализ методов измерения
параметров вибрации
2.1 Динамический принцип измерения
.2 Кинематический принцип измерения
3. Разработка структурной схемы и
алгоритма работы измерителя вибрации
3.1 Структура датчика
.2 Алгоритм работы
4. Разработка электрической
принципиальной схемы
4.1 Требования к аналоговой части
.2 Требования к АЦП
4.3 Выбор АЦП
.4 Описание схемы преобразователя
5. Разработка программного
обеспечения
. Разработка программы и методики
оценки метрологических и эксплуатационных характеристик
Заключение
Список литературы
Приложение
Введение
Одной из самых важных и актуальных проблем в современной технике является
измерение и получение экспериментальной информации о величинах, характеризующих
механические колебательные процессы, происходящие в различных механизмах и
аппаратуре. Такой вид колебаний часто называют вибрацией. В зависимости от
оказываемого действия её делят на вредную и полезную.
Наличие полезной вибрации является неотъемлемой частью исправного
функционирования механизма, также она может возбуждаться преднамеренно с
помощью специальных устройств и использоваться в строительных или дорожных
работах, например, для уплотнения бетонных смесей. С другой стороны, полезная
вибрация может благотворно воздействовать на человеческий организм. Она
способствует:
a) разжижению крови;
b) нормализации давления в сосудах;
c) снятию усталости и стресса;
d) расслаблению мышечных тканей;
Вредная вибрация способна принести значительный ущерб промышленности, так
как её разрушающее действие может быть очень сильным. Например, повышение
изнашивания осей, валов и подшипников, ускорения процесса возникновения
усталости металлов, вследствие чего происходит его разрушение, приводящее к
разрушению деталей машин, образование трещин в фундаментах и стенах крупных
сооружений, обрывы тросов и проводов и т.д. В то же время она оказывает
отрицательное воздействие на человеческий организм. При длительном воздействии
сильной вибрации возможны различные заболевания, такие как раздражение
периферических рецепторов и поражение центральной нервной системы.
В связи с выше сказанным возникает необходимость исследования и измерения
вредной вибрации, так как это может принести большую пользу при изучении
функционирования сложной техники, способствовать её дальнейшему
совершенствованию и выбору оптимального режима работы.
Следует отметить, что экспериментальные исследования и измерение вибрации
относятся к числу весьма сложных и трудоёмких, так как данные процессы
объединены общим трудоёмким теоретическим и практическим аппаратом, в который
входят: физико-математическая идеализация схем различных устройств, применение
различных методов технического расчёта и использования устройств, позволяющих
проводить экспериментальные и наладочные работы.
В данной работе было необходимо разработать бесконтактный виброметр.
Для выполнения поставленной
цели было необходимо решить следующие задачи:) Произвести анализ
существующих принципов измерения вибрации и выбрать параметры, подлежащие
регистрации для измерения вибрации;) Произвести анализ методов
измерения выбранных параметров и обосновать выбор;) Разработать
структурную схему и алгоритм работы измерителя вибрации;) Разработать
принципиальную электрическую схему;) Разработать ПО
виброметра;) Разработать программы и методики оценки
метрологических и эксплуатационных характеристик разработанного виброметра;) Произвести
оценку метрологических свойств разработанного прибора и составить выводы по
работе.
1. Анализ
области использования виброметра и принципов измерения вибрации
.1
Колебательные процессы
Колебательным процессом называется такой процесс, при котором
какой-нибудь физической величине, его характеризующей, свойственны переходы от
возрастания к убыванию, чередующиеся с переходами от убывания к возрастанию.
Однако существуют колебательные процессы, для которых характерен переход
значений физической величины от возрастания к убыванию или, наоборот, всего
лишь один раз. Такие процессы называются импульсными.
Иногда протекание во времени рассматриваемого явления и изменение
основной физической величины, его характеризующей, во многом зависит от
каких-либо других физических величин. При одних значениях этих физических
величин такой процесс может являться колебательным с неоднократным чередованием
переходов от возрастания к убыванию и обратно, а при других - колебательным с
единственным переходом от возрастания к убыванию или, наоборот.
В качестве примера можно использовать свободные колебания маятника
(Рисунок 1).
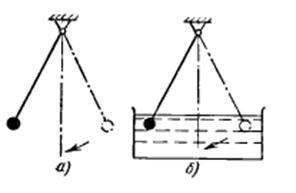
Рис. 1. Свободные колебания маятника:
Также бывают случаи, когда признаки колебательного процесса проявляются
при рассмотрении одних физических величин и не проявляются при рассмотрении
других физических величин. Такие случаи происходят очень часто. Рассмотрим
пример, представленный на рисунке (2).
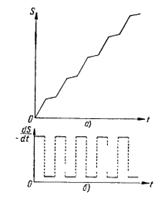
Рис. 2. Пример к определению колебательного процесса.
Величина S является
функцией времени tи как видно на
рисунке (2, а) только возрастает без переходов к убыванию. Поэтому может
показаться, что процесс не является колебательным. Однако признаки колебательного
процесса проявляются, если перейти к производной по времени величины S (dS/dt).
Таким образом, признаки колебательного процесса могут проявиться, а могут
не быть обнаружены в зависимости от того, какими сторонами процесса
интересуется наблюдатель.
Многие колебательные процессы, происходящие в механических системах,
называются вибрацией. Общепринятого понятия, которое разделяют вибрацию и
другие механические колебания, не существует, поэтому очень часто термины
“вибрация” и “механические колебания” приравнивают по смыслу.
Иногда в литературе встречается такое определение, по которому вибрация -
это малые и частые колебания, а собственно колебания - большие и редкие. Но это
определение не является правильным. Так как при моделировании атома про
электрон с малыми, частыми колебаниями говорят, что он колеблется, а не
вибрирует, а при больших и довольно редких колебаниях крыла самолёта или
корпуса корабля принято называть эти колебания вибрацией.
В технике вибрацией принято называть только вредные колебания в механизмах
и элементах, а также в целых сооружениях, которые не являются неотъемлемым
условием выполнения ими своих функций, а возникают вследствие несовершенства
конструкций.
Например, сюда можно отнести вибрацию машин, возникающую из-за
недостаточной уравновешенности вращающихся деталей, вибрацию элементов
самолёта, возникающую под воздействием сил аэродинамического происхождения и
вибрацию мостов и зданий от сотрясений или ветра.
В последнее время в технике стали использовать колебательное движение,
которое создаётся в аппаратах и машинах, служащих для производства различных
материалов. Такой вид колебаний с полезными функциями также называют вибрацией.
Периодические
колебания
Колебательный процесс называется периодическим, а в случае вибрации -
периодической вибрацией, если все значения колебательной величины,
характеризующие процесс, повторяются через одинаковые промежутки времени Tв той же последовательности.
В таком случае справедливо выражение (1):

где q(t) - некоторая колебательная величина, i = …, -2, -1, 0, 1, 2, …
Полным колебанием или циклом колебаний называется часть периодического
колебательного процесса, повторяющаяся через наименьший отрезок времени T, называемый периодом колебаний или
просто периодом. А величина v
(формула 2), обратная периоду T,
называется числом колебаний в единицу времени или частотой колебаний:

На рисунке (3) графически показаны период и частота колебаний.
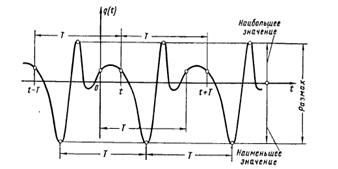
Рис. 3. Периодический колебательный процесс.
Число полных колебаний за 2π единиц времени называется угловой
частотой. Угловая частота связана с периодом колебаний и числом колебаний в
секунду (формула 3):
Непрерывная последовательность, выражающая совокупность всех частот на
некотором промежутке от нижней граничной частоты vн до верхней граничной частоты vв, называется частотным диапазоном.
Ширина диапазона выражается в интервалах. Интервал, для которого vв=2vн, называется октавой. Диапазон имеет ширину kоктав, если vв=2kvн.
Гармонические
колебания
Периодический колебательный процесс (формула 4, 5) называется
гармоническим колебанием, а в случае вибрации - гармонической вибрацией, если
мгновенные значения колебательной величины пропорциональны синусу или косинусу
линейной функции времени так, что:


где qa, φ, ω - постоянные величины, которые
называются параметрами гармонического колебания.
Гармонические колебания представлены на рисунке (4).
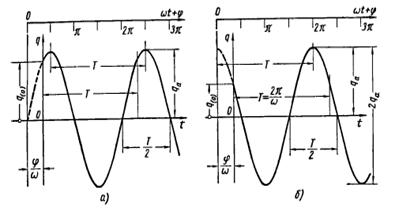
Рис. 4. Гармонические колебания:
Величина qа называется
амплитудой гармонического колебания или просто амплитудой. Она показывает
максимальное значение, достигаемое гармонической колебательной величиной.
Аргумент ωt + φ называется фазовым углом, он
однозначно определяет фазу гармонического колебания. Если для рассматриваемого
процесса известно начало отсчёта времени, то фаза определяется числом протекших
периодов.
Величина φ называется начальным фазовым углом, который определяет
начальную фазу в момент времени, принимаемый за начальный. Изменяя данный
параметр, вызывается смещение синусоиды вдоль оси времени.
Среди гармонических колебаний встречаются синхронные и синфазные колебания.
Два колебания одинаковой частоты называются синхронными. Для таких
колебаний разность начальных фазовых углов ε одного колебания относительно другого
называется сдвигом или разностью фаз.
Когда определяют сдвиг фаз между двумя гармоническими колебаниями, то
говорят, что одно колебание опережает другое. Математически это можно показать
с помощью следующих неравенств (6):
 ,
,  ,
, 
В этом случае считается, что колебание 1 “опережает” колебание
2.Очевидно, что при изменении нумераций колебаний сдвиг фаз меняет знак.
Фазовые соотношения наглядно представлены на рисунке (5).

Рис. 5. Фазовые соотношения.
На данном рисунке под буквой (а) синусоидальное колебание 1 опережает
синусоидальное колебание 2, под буквой (б), наоборот, синусоидальное колебание
2 опережает синусоидальное колебание 1.
Синхронные гармонические колебания, сдвиг фаз между которыми равен нулю,
называются синфазными или говорят, что они находятся в фазе. Если сдвиг в фазе
равен π, то говорят, что гармонические
колебания находятся в противофазе (рисунок 6).
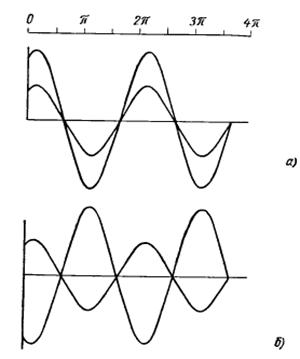
Рис. 6. Фазовые соотношения:
Импульсные
колебания
Импульсные процессы характеризуются наличием пауз - конечных промежутков
времени, в течение которых колебательная величина q = 0, и промежутков времени tи, определяющих длительность импульса, в течение которых q(t) может обращаться в нуль только в отдельных точках.
Такие процессы могут быть как периодическими, так и непериодическими.
Часто на практике рассматриваются одиночные импульсы, под которыми может
пониматься удар.
При периодических процессах число импульсов в единицу времени v, которое равно обратной величине
периода T, по прошествии которого происходит
повторение процесса, называется частотой повторения импульсов или частотой
импульса.
Импульсы бывают различной форы, выделяются прямоугольные,
трапецеидальные, треугольные, полисинусоидальные, смещённо-косинусоидальные
(рисунок 7).
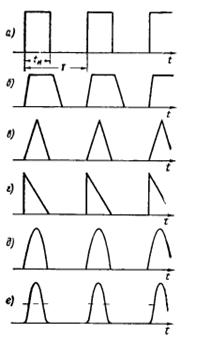
Рис. 7. Импульсы различной формы:
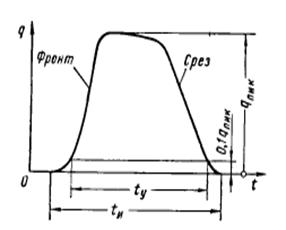
Участок нарастания отдельного импульса называется фронтом, участок спада
- срезом (рисунок 8).
Случайные
процессы
На практике часто приходиться работать с колебательными процессами, у
которых значения колебательной величины в разные моменты времени являются случайными
величинами.
Такие процессы невозможно описать какой-либо зависимостью q(t). А если использовать только дискретные значения в
конкретные моменты времени, то этого может оказаться недостаточно для решения
поставленной задачи.
Выше описанные процессы называются случайными, а для вибрации - случайной
вибрацией (рисунок 9).
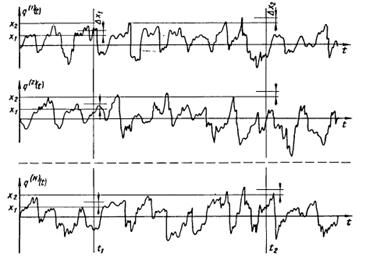
Рис. 9. Случайные процессы.
Функциональная зависимость q(t) случайных процессов устанавливается
в том смысле, что наблюдение процессов q1=q(t1), q2=q(t2) и т.д. происходит с некоторой
степенью вероятности. Также во многих случаях имеет место быть статическая
связь предыдущих состояний с последующими, поэтому эти процессы называются
случайные процессы с последствиями. Отсутствие последствий означало бы, что
колеблющиеся величины реальной системы безынерционны.
В результате проведённых наблюдений и измерений функция, которая
описывает процесс, получает вид q(j) (t), который соответствует данной j-ой реализации случайного процесса. В связи с тем, что
практически невозможно добиться абсолютной идентификации условий при повторении
опыта, функцияq(t) называется случайной, поэтому для каждой другой реализации
процесса функция q(j)(t) с большой вероятностью будет другой, причём неизвестно
заранее - какой именно. В итоге, случайный процесс представляет собой некоторую
совокупность таких реализаций (Рисунок 9).
Таким образом, рассмотрев основные виды колебаний, было решено, что
разрабатываемой устройство предназначено только для измерений гармонических
колебаний. Это связано с тем, что большая группа колебаний, происходящих в
реальных условиях, имеет форму гармонических колебаний или очень схожую с ней,
помимо этого уравнение гармонических колебаний имеет достаточно простой вид для
расчёта и анализа.
Колебательные
величины
Колебательными величинами называются физические величины, характеризующие
своим изменением во времени колебательные процессы. Некоторые величины были
представлены выше при описании колебательных процессов. В этом разделе будут
описаны величины, которые более характерны для вибрационных измерений.
Для колебательного движения точки мгновенное значение каждой из
координат, которое указывает положение точки, называется смещением,
отклонением, перемещением или в случае вибрации - виброперемещением.
Обозначается виброперемещениеs(t).
Первая производная виброперемещения (формула 7) по времени называется
виброскоростью:

Виброскорость характеризует быстроту перемещения материальной точки
относительно выбранной системы координат.
Вторая производная виброперемещения по времени - виброускорение (формула
8):
Данная величина определяет быстроту измерения скорости материальной
точки.
Иногда говорят о третьей производной виброперемещения по времени,
характеризующей скорость (темп) изменения ускорения материальной точки, -
резкости (формула 9):
Помимо этих величин, иногда при вибрационных измерениях регистрируется
такая величина, как угол поворота α(t), характеризующая поворот тела, или
поворот луча, исходящего из центра вращения тела, относительно другого луча,
считающегося неподвижным.
1.2 Принципы
измерения вибрации
В общем случае “измерить вибрацию” нельзя, так же как нельзя измерить
переменный ток. Под измерением вибрации понимается измерение определённых
параметров или величин, характеризующих вибрацию. На сегодняшний момент
существуют 3 основных принципа измерения вибрации.
Первый принцип заключается в том, что в пределах принятой физико-математической
идеализации для описания состояния вибрирующего объекта или системы объектов
необходимо, чтобы шесть независимых координат, определяющих положение объекта в
пространстве, были получены как функции времени на достаточно большом
промежутке времени, например, в виде осциллографических или магнитных записей -
так называемых виброграмм. В этом случае информация для одного твёрдого тела
является полной. Выбор этих координат неоднозначен. Наиболее распространённым
выбором являются такие параметры, как линейные смещения (sx(t), sy(t), sz(t)) и углы
поворота (αx(t), αy(t), αz(t)).
Получив эти данные, можно вывести и многие другие величины, и параметры
вибрации, которые необходимы для решения поставленных задач. Это могут быть
производные и интегралы по времени, пиковые значения, фазовые соотношения между
вибрацией и другими регистрируемыми процессами и т.д.
Второй принцип основан на том, что исследователь удовлетворится
полученной информацией о каком-либо определённом параметре, характеризующем
вибрацию. В таком случае результат измерения этого параметра выдаётся сразу
теми или иными приборами, без получения функциональных зависимостей s(t) и α(t), и, следовательно, без снятия виброграмм.
Третий принцип характеризуется тем, что поступающая информация о величинах
и параметрах, характеризующих вибрацию, минует исследователя, а используется
для сигнализации или для автоматического управления. Можно привести пример,
который заключается в следующем: при достижении пикового значения ускорения
вибрирующей машины автоматическое устройство производит её выключение.
1.3
Обоснование выбора параметра, подлежащего регистрации
Согласно ТЗ разрабатываемый виброметр должен измерять три основных
параметра вибрации, однако в [1] указано, что при виброизмерениях в качестве
измеряемой величины должна быть использована одна из следующих величин:
виброперемещение, виброскорость, виброускорение.
В данной работе в качестве величины, которая будет регистрироваться
датчиком, выбрано виброперемещение. Был выбран именно этот параметр по двум
причинам. Во-первых, используя значение перемещения, можно вывести значения
других интересуемых параметров вибрации. Во-вторых, виброперемещение является
основной величиной, используемой во многих методах измерения параметров
вибрации, что избавляет от проведения дополнительных вычислений. Измеряться
будет именно пиковое значение виброперемещения.
2. Анализ
методов измерения параметров вибрации
Важнейшим этапом при выборе метода измерения параметров вибрации является
выбор датчика, служащего для получения информации о процессах вибрации в той
форме, которая будет удобна для дальнейшего преобразования, хранения и
обработки. На сегодняшний день существуют 2 основных принципа измерения
вибрации: динамический и кинематический.
2.1
Динамический принцип измерения
Данный принцип измерения заключается в том, что все параметры объекта
исследования измеряются относительно искусственной неподвижной системы отсчёта,
реализуемой в датчиках инерционного действия, которые сочленяются с вибрирующим
объектом через упругий подвес. При этом происходит измерение абсолютных
значений параметров вибрации. В частности, к ним относятся амплитудно-частотные
и фазовые характеристики. Измерения происходят за счёт использования
инерционной массы, которая вывешивается на упругом подвесе и при высоких
частотах вибрации сохраняет инерционный элемент практически в состоянии покоя.
Датчики абсолютной вибрации разделяют на генераторные и параметрические.
К генераторным относятся пьезоэлектрические, индукционные, датчики, основанный
на эффекте Холла и т.д. Они осуществляют преобразование энергии механических
колебаний в электрический сигнал. Действие параметрических датчиков основано на
преобразовании механических колебаний в изменение параметров электрических
цепей, таких как сопротивление, ёмкость, частота и т.д. Их основной
особенностью является наличие внешних источников питания и демодуляторов,
которые фиксируют изменение параметров электрических схем. К этому виду
датчиков относятся резистивные, трансформаторные, магнитоупругие, ёмкостные,
электронно-механические, вибрационно-частотные, предельные контактные,
импедансные и др.
Далее будут рассмотрены датчики абсолютной вибрации, где будут описаны
принцип действия, основные преимущества и недостатки.
Пьезоэлектрические
преобразователи
Пьезоэлектрические преобразователи широко используются благодаря своим
малым габаритным размерам, широкому частотному и динамическому диапазону,
незначительным коэффициентам влияния внешних факторов. Применяться они могут
для измерения виброперемещения и виброскорости.
Существует огромное
количество пьезоэлектрических преобразователей, которые можно классифицировать
по четырём признакам:) по виду деформации пьезоэлемента (сдвиг, изгиб);) поспособу
закрепления пьезоэлемента (клеенно-поджатые, с предварительным поджатием);) по
способу закрепления на объекте (прижимные, приклеиваемые);) по принципу
использования (виброударопрочные, высокочастотные, высокотемпературные);
Принцип действия данного типа
преобразователей основан на пьезоэлектрическом эффекте, который заключается в
том, что под действием внешней силы некоторые вещества могут генерировать
электрический заряд, чаще всего в качестве этого вещества используются
монокристаллические или поликристаллические материалы. Конструктивная схема
пьезоэлектрического преобразователя представлена на рисунке (10).
В данной схеме видно, что
инерционный элемент прикреплён к верхней грани пьезоэлемента, в то время как
нижняя грань пьезоэлемента прикреплена к корпусу. При установке преобразователя
на объекте измерения он воспринимает вибрацию объекта. Вследствие стремления
инерционного элемента сохранить состояние покоя, пьезоэлемент деформируется от
воздействия на него инерционной силы. В результате возникает электрический
заряд, который будет пропорционален ускорению. Так как данный преобразователь
измеряет ускорение, его часто называют пьезоакселерометром.
Рис. 10. Конструктивная схема пьезоэлектрического преобразователя:
Но такой преобразователь имеет большой недостаток, а именно, температура
эксплуатации объекта. При превышении определённой границы, пьезоэлектрический
элемент теряет часть своей поляризации и коэффициент преобразования датчика
снижается. А при достижении точки Кюри используемого материала он вовсе теряет
свою поляризацию, что в итоге приводит к выходу из строя самого датчика. Помимо
этого, пьезоэлектрические датчики имеют большое выходное сопротивление, а при
работе с усилителем напряжения недостатком является зависимость выходного
сигнала от длины кабеля.
Ёмкостные
преобразователи
Данные преобразователи распространены именно среди параметрических.
Типовое устройство включает в себя наличие статора и ротора (неподвижной и
подвижной части).
Для измерения параметров вибрации могут быть использованы следующие подходы:
изменение площади перекрытия пластин, расстояния между пластинами,
диэлектрической проницаемости диэлектрика конденсатора. Так как перемещения при
вибрации могут достигать менее 1мм, подход, основанный на изменении площади
перекрытия пластин, в основном не используется. Также в зависимости от
инерционной массы и резонансной частоты ёмкостные преобразователи можно
применять для работы в режимах виброметра, велосиметра, акселерометра.
Существует несколько схем построения ёмкостных преобразователей, наиболее
распространёнными являются схемы в цепи постоянного тока, мостовые и
резонансные схемы. Рассмотрим схему с преобразователем в цепи постоянного тока
(рисунок 11).
Рис.11. Схема с ёмкостным преобразователем в цепи постоянного тока:
Для данного вида схем выходными величинами являются амплитуда и фаза
напряжения, которые снимаются с преобразователя. При синусоидальной вибрации
напряжения на выходе (формула 10):
где Сх - изменение ёмкости конденсатора преобразователя при воздействии
вибрации; Uвх- напряжение питания схемы; Cэ - постоянная ёмкость
преобразователя и подводящих проводов; R-сопротивление нагрузки, ω-круговая частота вибрации.
Для малых изменений ёмкости и больших постоянных времени преобразователя
выходное напряжение в таких схемах пропорционально напряжению питания цепи и
относительному изменению ёмкости преобразователя, то есть перемещению, а при
малой постоянной времени цепи выходное напряжение будет пропорционально скорости.
Основными недостатками такого преобразователя является зависимость от
изменения температуры и влажности, а также от влияния ёмкости и индуктивности
подводящих проводов (кабелей), что приводит к необходимости их совместной
калибровки с кабелем.
Индукционные
преобразователи
Принцип действия индукционных датчиков основан на явлении
электромагнитной индукции, которая заключается в возникновении электродвижущей
силы в замкнутом контуре (электрическая катушка) при изменении магнитного
потока, проходящего через него. Возникшая вследствие этого явления ЭДС будет
прямо пропорциональна скорости изменения магнитного потока, а значит и скорости
движения катушки в магнитном поле. ЭДС рассчитывается по формуле (11):

где B - магнитная индукция, n-число витков, d-средний диаметр катушки, ν-скорость движения катушки в магнитном
поле.
Данный тип преобразователя позволяет применять его для измерения любых
высокочастотных вибраций с широким диапазоном амплитуд. Их основное преимущество
- это простота конструкции и надёжность в эксплуатации.
В состав индукционных преобразователей входят: корпус, инерционная масса
и индукционный элемент, который включается между инерционной массой и
индукционным элементом. Сам индукционный элемент включает в себя постоянный
магнит и электрическую катушку, который устанавливается так, чтобы при движении
инерционной массы относительно корпуса преобразователя изменяется магнитный
поток через катушку и в результате появляется выходной сигнал преобразователя.
Существуют несколько вариантов подвески индукционной массы в индукционных
преобразователей, среди них различают индукционные преобразователи с
маятниковой и осевой подвеской индукционной массы (Рисунок 12).
Рис. Схемы подвески инерционной массы в индукционных преобразователях:
ОП - ось подвески, ЦТ - центр тяжести, ЦЖ - центр жёсткости.
Маятниковая подвеска характеризуется тем, что индукционная масса
совершает вращения вокруг оси подвески. Она позволяет добиться сравнительно
низких собственных частот при относительно малых габаритах, но имеет большой
недостаток: необходимость частой регулировки положения маятника и собственной
частоты преобразователя, а также маятниковая подвеска обладает повышенной
чувствительностью к поворотам корпуса прибора.
Осевая подвеска характеризуется расположением на одной линии центров
тяжести и жёсткости, причём эта линия имеет направление измеряемого
колебательного движения. Также центры тяжести и жёсткости могут и вовсе
совпадать. Такой тип подвески инерционной массы менее чувствителен к повороту
корпуса, но с другой стороны он имеет достаточно высокую собственную частоту.
Также необходимо сказать, что общим недостатком индукционных преобразователей
является принцип их работы, который практически ограничивает нижний диапазон
измеряемых частот пределом 8-10 Гц.
Индуктивные
преобразователи
Принцип работы индуктивных преобразователей основан на изменении
индуктивности системы измерения в функции перемещения одного её элемента.
Самыми распространёнными видами такого типа преобразователя являются
индуктивный преобразователь с переменной величиной или площадью зазора, а также
с подвижным цилиндрическим сердечником.
Индуктивные преобразователи с переменной величиной зазора предназначены
для измерения перемещения в диапазоне от долей микрона до нескольких
миллиметров, индуктивные преобразователи с переменной площадью зазора способны
измерять перемещения до 20 мм, а самые большие перемещения (до 2000 мм) способны
измерять индуктивные преобразователи соленоидного типа с подвижным сердечником.
Схемы вышеперечисленных преобразователей представлены на рисунке (13).
Рис. Схемы индуктивных преобразователей:
Также применяют дифференциальные индуктивные преобразователи, так как у
них линейный участок характеристики больше, чем у простых и составляет 0,4 -
0,6 от среднего значения зазора. К тому же дифференциальные индуктивные
преобразователи позволяют проводить высокотемпературные измерения. Для этого
применяются жаростойкие материалы с малым температурным коэффициентом и провода
из нихрома, так как данный сплав обладает высокой жаростойкостью, высоким
удельным сопротивлением и имеет минимальный температурный коэффициент
электрического сопротивления.
Индуктивные преобразователи отличаются простотой устройства и
надёжностью, а также имеют высокую чувствительность, поэтому отпадает
необходимость дополнительного усиления сигнала.
Применяются они зачастую для измерения низкочастотных вибраций. Частота
тока питания не превышает 3000-5000 Гц, иначе может возникнуть вероятность
появления значительных помех, посредством влияния паразитных ёмкостей и
индуктивностей соединительных проводов. В результате резко уменьшается
стабильность работы преобразователя.
Резистивные
преобразователи
Действие такого типа преобразователей основано на изменении сопротивления
от приложенных внешних механических сил. К резистивным преобразователям
относятся контактные, реостатные, тензорезисторные, тензолитовые и другие
преобразователи.
Принцип работы контактных преобразователей состоит в замыкании или
размыкании контактов, управляющих электрической цепью.
Тензолитовыерезистивные преобразователи используют зависимость сопротивления
электролитической ячейки от состава и концентрации электролита и геометрических
размеров ячейки. При перемещении подвижного электрода преобразователя
изменяется расстояние между электродами. Это приводит к изменению сопротивления
при постоянной концентрации электролита.
Рис. Схемы включения реостатных преобразователей.
Принцип работы таких преобразователей основан на перемещении движка
реостата, в соответствии со значением измеряемого механического параметра. В этом
случае выходным величиной является активное сопротивление, которое может
изменяться по линейному или другому закону.
Недостатком реостатных преобразователей является нелинейная зависимость
тока от перемещения движка, которая определяется соотношением между внутренним
сопротивлением Rгпоказывающего
прибораP, добавочным сопротивлением Rди сопротивлением преобразователя R.
Чтобы решить эту проблему используют мостовые схемы реостатных
преобразователей (Рисунок 6, г, д), так как они имеют малую нелинейность и
высокую чувствительность. Также их применяют для измерения больших перемещений
(0,1-0,5 мм и далее).
Тензорезистивные преобразователи используют явление тензоэффекта. Он
заключается в способности проводниковых и полупроводниковых материалов изменять
под действием приложенной растягивающей или сжимающей силы удельную
электрическую проводимость.
Тензоэффект характеризуется тензочувствительностью материала и
рассчитывается по формуле (12):

где lм и Sм - длина и сопротивление тензочувствительного элемента, а Δlми ΔSм - приращение длины и сопротивления
вследствие приложения внешних сил.
Применяются проволочные, фольговые и полупроводниковые тензорезисторы.
Для виброизмерений всё шире применяются полупроводниковые резистивные
преобразователи, действие которых основано на использовании пьезорезистивного
эффекта - зависимости электрического сопротивления полупроводника от действия
механических напряжений.
В преобразователях такого типа одновременно сочетаются и свойства пьезопреобразователей
и свойства тензопреобразователей. Электрические параметры полупроводника
изменяются вследствие следующих изменений:) времени жизни носителей при
изменении концентрации дефектов кристаллической решётки;) положении
донорных или акцепторных уровней и, следовательно, концентрации носителей;) времени
жизни носителей по отношению к энергии уровня Ферми.
У пьезорезистивных
преобразователей существуют несколько способов нагруженияp-nпереходов:) надавливание
на p-n переходы остриём стальной иглы;) нагружение
перехода штырём;) выполнение полупроводникового прибора в виде иглы с p-nпереходом
на конце;) наклеивание или напыление полупроводникового кристаллика на
деформирующую балочку или диафрагму.
Таким образом, выбирая один
из вышеперечисленных способов можно изменять вольт-амперные характеристики
преобразователя, что используется для измерения приложенного напряжения или
давления.
Применяя первый или второй
способ нагруженияp-nперехода можно получить пьезорезистивный акселерометр.
Для измерения ускорений,
амплитуды и частоты вибрации тензометрическим методом часто применяют
преобразователи инерционного типа, также можно производить измерения с помощью
преобразователя перемещений и силоизмерителей. При таком способе необходимо
располагать преобразователь перемещения и силоизмеритель между объектом
измерения и неподвижной опорой.
Также на основе
тензорезисторов создан полноценный виброметр ВАП-3М.
Но и такие преобразователи
имеют несколько недостатков, к которым относятся: малая механическая прочность,
высокая чувствительность к воздействию внешних условий, существенный разброс
характеристик у разных образцов.
Вибрационно-частотные
преобразователи
Основным элементом преобразователей с частотным выходным сигналом
является колебательный контур или частотно-зависимая цепь с параметрами,
зависящими от измеряемой величины. Могут применяться как электрические
колебательные контуры, так и электромеханические колебательные контуры.
Недостатком первых является низкая добротность колебательного контура, которая
определяет стабильность работы преобразователя.
Использование электромеханического колебательного контура может решить
эту проблему, так как добротность у такого контура значительно превышает
добротность электрического контура и может достигать нескольких тысяч. Самым
распространённым частотным преобразователем с электромеханическим колебательным
контуром является струнный преобразователь.
Струнные методы отличаются простотой и высокой точностью, также они
располагают возможностью передавать сигналы на большие расстояния при хорошей
стабильности преобразования по времени.
Есть два режима работы струнных преобразователей: режим заданной длины и
режим заданной силы.
Режим заданной длины применяется для измерения перемещений, режим
заданной силы может применяться для измерения ускорения.
В корпусе натянуты 2 струны, при этом основная струна находится в зазоре
постоянного магнита. Обе струны имеют одинаковые размеры, сделаны из одного
материала и жёстко укреплены в торцах корпуса, через изоляционные втулки, а
другие концы закреплены в упругих пластинах, которые связывают между собой
грузики, предназначенные в качестве инерционной массы. Грузики прикреплены к
корпусу с помощью двух плоских консолей, которые обеспечивают перемещение
инерционной массы только в одном направлении.
Основная и дополнительная струна включены в смежные плечи моста струнного
генератора, который создаёт режим незатухающих колебаний основной струны на её
резонансной частоте.
При изменении температуры изменится активное сопротивление струны. Это
приведёт к срыву колебаний. Но в данной конструкции изменению температуры
подвергается и дополнительная струна, у которой активное сопротивление меняется
также, как и у основной. Это приводит к устранению разбаланса моста.
Измеряемое виброускорение действует в направлении, которое
перпендикулярно струнам и плоским консолям. Так как в этом направлении струны
имеют большую чувствительность, преобразователь позволяет измерять малые
виброускорения.
К недостатку струнных преобразователей относится сравнительно малое время
стабильности. Это связано с тем, что струна должна быть натянута и испытывать
механические напряжения, достигающие 20-100 кгс/см2, а это в свою очередь
вызывает релаксацию напряжений в струне и приводит к выползанию её из зажимов.
Гальваномагнитные
преобразователи
Принцип работы гальваномагнитных преобразователей заключается в
использовании гальваномагнитных эффектов, которые возникают в электропроводных
телах, помещённых в магнитное поле, при прохождении через них электрического
тока.
В виброизмерениях применяются два гальваномагнитных явления: эффект Холла
и эффект магнитосопротивления.
Эффект Холла основан на возникновении электродвижущей силы Холла на
преобразователе с током, который помещён в магнитное поле. Величина этой ЭДС
находится по формуле (13):

где Rh- постоянная Холла, d-толщина пластины, i-ток, проходящий вдоль пластинки, B-индукция магнитного поля.
По формуле видно, что ЭДС Холла пропорциональна току, проходящему вдоль
пластины, измеряемой магнитной индукции и коэффициенту, который определяется
свойствами материала и размером пластины.
Состав преобразователей Холла включает в себя плоскую прямоугольную
пластину или плёнку, имеющей 2 пары электродов (для подвода управляющего тока и
для снятия выходного сигнала). Различают несколько конструкций преобразователей
Холла и основные приведены на рисунке (18).
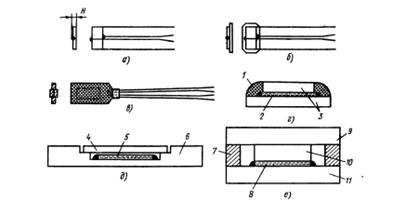
Рис. Преобразователи Холла:
a -
неармированный преобразователь, б - преобразователь, наклеенный на слюдяную
подложку, в - преобразователь в эпоксидном компаунде, г - преобразователь в
оболочке типа “сэндвич”, д - преобразователь в коробчатой оболочке, е -
преобразователь в магнитно-симметричной ферритовой оболочке;
- компаунд, 2,8 - полупроводниковые пластины, 3 - керамические пластины,
4,9 - крышки, 5 - датчик, 6 - короб, 7 - стенка, 10 - ферритовый стержень, 11 -
ферритовое основание.
Действие полупроводниковых магниторезисторов основано на эффекте Гаусса,
который заключается в зависимости удельного сопротивления полупроводника
(металла), помещённого в магнитное поле, от значения индукции этого поля.
Изменение удельного сопротивления полупроводника в магнитном поле
происходит за счёт удлинения пути движения электронов в полупроводнике из-за
действия силы Лоренца, которая искривляет их траекторию.
Относительное изменение удельного сопротивления определяется по формуле
(14):
где  - изменение удельного электрического сопротивления при
индукции B,
- изменение удельного электрического сопротивления при
индукции B,  -удельное электрическое сопротивление
при индукции B=0, A-коэффициент формы,
-удельное электрическое сопротивление
при индукции B=0, A-коэффициент формы,  - подвижность электронов,
определяемая как отношение скорости электронов к напряжённости электрического
поля, n - показатель степени, зависящий от
магнитной индукции.
- подвижность электронов,
определяемая как отношение скорости электронов к напряжённости электрического
поля, n - показатель степени, зависящий от
магнитной индукции.
Магниторезисторы изготавливают на изоляционной подложке, имеющей толщину
0,1-0,5 мм, на которую наклеивают слой вещества толщиной 20 мкм. Затем к этой
конструкции приваривают выводы. Основные типы магниторезисторов представлены на
рисунке.
Если вернуться к технике виброизмерений, то преобразователи Холла и
магниторезисторы помещают в воздушные зазоры разомкнутых магнитопроводов
преобразователей перемещений, магнитный поток которых зависит от перемещения
или изменения ориентации изделия, который связан или с магнитопроводом или с
гальваномагнитным преобразователем.
К недостатку таких преобразователей можно отнести значительное искажение
линейной зависимости выходного сигнала с ростом магнитной индукции, что
приводит к необходимости постоянной корректировки результатов измерения и
специального подбора его геометрических размеров.
Вихретоковые
преобразователи
Принцип измерения вибрации посредством использования вихретоковых
преобразователей заключается в регистрации изменений электромагнитного поля в
зависимости от зазора между возбуждающей вихревые токи электрической катушкой и
электропроводящей поверхностью изделия.
Также помимо контролируемого зазора существенное влияние может оказывать
толщина токопроводящего слоя, магнитная проницаемость и удельная электрическая
проводимость материала.
Метод контроля вибрации с
помощью вихревых токов имеет несколько существенных преимуществ:) Является
практически безынерционным;) Пределы измерения частот лежат в диапазоне
от нуля до сотен килогерц, а диапазон измерения амплитуд находится в пределе от
миллимикрометров до миллиметров;) Позволяет проводить контроль при удалении
преобразователя от регистраторов на сотни метров без использования механической
связи;) Вихретоковые преобразователи имеют малое внутреннее сопротивление,
нечувствительны к вибрациям поперечного направления и могут градуироваться
статическим путём;) Отсутствует необходимость применения калибровочных
вибростендов и образцовой измерительной аппаратуры при эксплуатации;) Позволяет
регистрировать одновременно и вибрационные и статические перемещения объектов.
Опишем общий принцип
измерения вибрации методом вихревых токов. При статическом изменении расстояния
между вихретоковым преобразователем и поверхностью объекта с частотного
детектора или амплитудного детектора (зависит от используемого выбора
модуляции) снимается постоянная составляющая, которая имеет наибольшее значение
при удалении датчика от объекта. В случае, если поверхность совершает
периодические колебания, то возникает низкочастотная переменная составляющая
сигнала. Её частота соответствует частоте вибрации, а амплитуда пропорциональна
вибросмещениям.
Конструкция вихретокоых
преобразователей состоит из накладных катушек индуктивности, намотанных на
торцовой части цилиндрического нетокопроводящего каркаса. Основные схемы
представлены на рисунке (20).
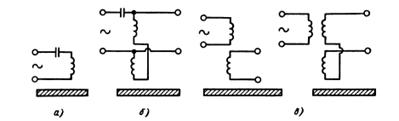
Рис. Схемы включения катушек
вихретоковых преобразователей:
Также большое распространение
получили вихретоковые преобразователи специализированной профильной конструкции
вытянутого прямоугольного, трапецеидального или треугольного сечения.
Такая конструкция позволяет
решить проблемы с изменениями интенсивности возникновения вихревых токов
(выходного сигнала), которые возникали вследствие смещения в плоскости самого
изделия.
Недостатками вихретоковых
преобразователей является чувствительность к переменным электромагнитным полям
(в случае амплитудной модуляции), высокая динамическая погрешность
виброизмерительной аппаратуры.
Магнитоупругие
преобразователи
Действие магнитоупругих преобразователей основано на изменении магнитной
проницаемости ферромагнитных тел в зависимости от возникающих в них
механических напряжений, которые обусловлены воздействием внешних механических
сил.
Основной показатель магнитоупругих материалов - относительная
магнитоупругая чувствительность, рассчитываемая по формуле (15):

где  -относительное приращение магнитной проницаемости,
-относительное приращение магнитной проницаемости,  - механическое напряжение в
ферромагнитном теле, вызвавшее данное приращение магнитной проницаемости.
- механическое напряжение в
ферромагнитном теле, вызвавшее данное приращение магнитной проницаемости.
В виброизмерительной технике широкое применение получили магнитоупугие
преобразователи, которые предназначены для измерения знакопеременных усилий.
Например, преобразователи с изгибающимся магнитопроводом.
Вибропреобразователь, выполненный на основе преобразователя усилий
показан на рисунке.
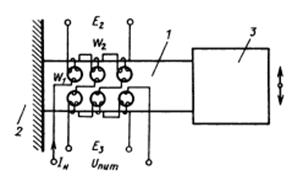
Рис. Схема магнитоупругоговибропреобразователя на основе преобразователя
усилий:
В таком преобразователе намагничивающий ток Iн, проходя по обмотке W1создаёт магнитный поток Ф, который разветвляется по боковым
стержням и наводит в измерительных обмотках ЭДС Е2 и Е3. При отсутствии
виброускорений и полной симметрии магнотопровода данные ЭДС будут равны.
В процессе измерения параметров вибрации ускорение воздействует на инерционную
массу и вызывает силу, которая изгибает магнитопровод, при этом один из
стержней испытывает сжатие, а другой - растяжение, вследствие этого изменяется
магнитная проницаемость стержней, соответственно изменяются и магнитные потоки,
проходящие по боковым стержням. В результате это вызывает увеличение ЭДС одной
измерительной обмотки и уменьшение ЭДС другой и на выходе схемы появляется
напряжение Uвых, которое рассчитывается по
формулам:

где K1 - коэффициент пропорциональности, p-усилие, действующее со стороны
инерционной массы на магнитопровод, а - ускорение, m-инерционная масса, K2=m*K1.
Данный преобразователь укрепляют на объекте таким способом, чтобы
плоскость магнитопровода была перпендикулярна направлению действия
виброускорения. Измерительные обмотки соединяют в мостовую схему. Обмотки
возбуждения подключают к источнику переменного напряжения.
В результате действия измеряемого виброускорения на инерционную массу
ярма 2 появляется сила, вызывающая изгиб боковых перемычек магнитопровода. При
этом один из стержней каждой боковой перемычки сжимается, а другой -
растягивается. В результате изменяется магнитная проницаемость стержней, а
общий магнитный поток распределяется по стержням обратно пропорционально магнитным
сопротивлениям. ЭДС одних измерительных обмоток получает положительное
приращение, а других - отрицательное. На выходе мостовой схемы появляется
сигнал, который будет пропорционален измеряемомувиброускорению.
Преобразователи, относящиеся
к первой группе, называются инплатронами (рисунок 23). Они представляют собой
газоразрядный прибор с холодным катодом К и двумя анодами А1 и А2, которые
жёстко соединены между собой оболочкой лампы.
При приложении к инплатрону
напряжения между катодом К и анодами образуется разряд в газе, контрагированный
в шнур, который играет роль инерционного элемента. При неравномерном движении
газоразрядной трубки под действием силы тяжести этот шнур смещается в
направлении, которое перпендикулярно продольной оси трубки. В результате
смещения шнура относительно анодов вызывается соответствующее изменение анодных
токов во внешней цепи прибора.
Применяется такой
преобразователь для измерения линейных ускорений и углов поворота.
К преобразователям второй
группы относятся магнитоуправляемые электронные лампы. Их действие основано на
изменении траектории электронов в лампе под действием магнитного поля, которое
может создаваться постоянным магнитом или электромагнитом. Это приведёт к
изменению электронного тока лампы.
Далее рассмотрим конструкцию
электронной лампы, помещённой в магнитное поле (рисунок 25). Поток электронов,
который эмитирует катод К, проходит через щель в диафрагме и поровну
распределяется между анодами А1 и А2. Поворот лампы относительно магнита,
который жёстко связан с объектом контроля, вызывает смещение потока электронов
под действием магнитного поля в сторону одного из анодов. Затем токи
распределяются между анодами, и это приводит к изменению выходного напряжения
между анодами лампы. В зависимости от выбора кинематической схемы с помощью
этого принципа можно построить преобразователи сил, параметров вибрации и т.д.
Конструкция преобразователей
третьей группы представляет собой миниатюрный стеклянный баллон, который
наполнен разряженным газом. В этот баллон вварены два проволочный электрода.
Лампа помещается в поле конденсатора, который питается от генератора.
Гальванометр подключён между электродами.
При перемещении лампы,
которая связана с объектом контроля, на её электродах начнёт появляться
постоянное напряжение, которое будет пропорционально смещению лампы от среднего
положения.
Механотроны - преобразователи
четвёртой группы, представляют собой электронную лампу, электронный ток которой
управляется непосредственно механическим перемещением её электродов. Их
отличительной особенностью является наличие одного или нескольких подвижных электродов,
которые соединяются с оболочкой лампы посредством упругого элемента.
Механическое перемещение электродов, которые жёстко связаны с объектом
контроля, приводит к изменению величины и конфигурации электрического поля
между электродами, а значит и к изменению анодного тока лампы.
Конструкция механотронов,
предназначенных для измерения перемещения и усилий, представлена на рисунке.
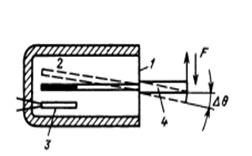
Рис.27. Механотрон для измерения перемещений и усилий.
Также в виброметрии применяется механотронный преобразователь ускорения.
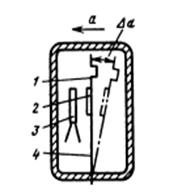
Рис. Механотронный преобразователь ускорения:
В таком преобразователе инерционная масса объединена с подвижным
электродом, который укреплён внутри лампы на упругой опоре.
По способу управления все механотроны подразделяются на лампы с
продольным, поперечным, зондовым, дифференциальным и лучевым управлением.
Недостатком механотронных преобразователей является высокая погрешность,
которая складывается из нестабильностей, вызываемых неконтролируемыми
внутриламповыми процессами, которые возникают вследствие неконтролируемых
изменений тока эмиссии катода и контактной разности потенциалов между анодом и
катодом прибора.
Преобразователи
механического импеданса.
Данный тип преобразователей состоит из преобразователя ускорения и
преобразователя силы, которые встроены в общий корпус. Одним из примеров
преобразователя механического импеданса является преобразователь типа 8001
фирмы “Брюль и Къер”.
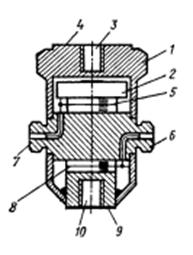
Рис. Конструкция преобразователя механического импеданса типа 8001 фирмы
“Брюль и Къер”:
Корпус данного преобразователя выполнен из титана. Преобразователь силы
помещён в непосредственной близости к точке возбуждения и содержит два
пьезоэлектрических диска. Чтобы обеспечить высокую прочность и малую массу
платформу для возбуждения делают из бериллия. Эта платформа имеет небольшую
контактную поверхность. Для обеспечения контакта с исследуемой конструкцией
платформу снабжают резьбовым отверстием. Над преобразователем силы расположен
преобразователь ускорения, который, как и преобразователь силы содержит два
пьезоэлектрических диска с инерционной массой.
Преобразователь механического импеданса типа 8001 имеет два коаксиальных
выхода от преобразователя силы и от преобразователя ускорения. Этот
преобразователь используется для измерения на мягких материалах.
Электрохимические
преобразователи
В виброметрии часто применяют преобразователи, действие которых основано
на измерении электродвижущей силы электролитической ячейки, её сопротивления,
ёмкости и индуктивности от воздействия преобразуемого параметра вибрации. Такие
преобразователи образуют класс электрохимических преобразователей, которые
подразделяются на гальванические, полярографические, химотронные и электрокинетические.
На практике самыми применяемыми являются химотронные и
электрокинетические преобразователи.
Химотронные преобразователи представляют собой электролитические ячейки,
которые заполнены раствором с содержанием окислённых и восстановленных ионов. В
качестве электролита в основном используют водный раствор йодистого калия с
небольшой примесью йода.
На рисунке (30) представлена схема химотронного преобразователя. Его
конструкция включает в себя корпус с двумя боковыми гибкими мембранами, на
которые воздействует вибрационное усилие. В средней части корпуса расположен
кольцевой платиновый катод с отверстием, через которое может проходить
электролит. Анод выполнен из двух электрически соединённых платиновых сеток.
При неподвижном электролите и включённом источнике питания через
преобразователь течёт слабый ток, который обусловлен диффузий ионов йода к
катоду. В случае, когда к одной из мембран прикладывается внешнее давление,
начинает возникает приток свежего электролита с трёхвалентными ионами йода через
отверстие в катоде, и ток, который протекает через преобразователь,
увеличивается.
Электрокинетические преобразователи используют разность потенциалов,
которая возникает при вынужденном протекании полярной жидкости через пористую
перегородку.
Такой преобразователь состоит из пористой перегородки, которая выполнена
из стекла или фарфора, а по её сторонам располагаются электроды в виде
металлических сеток, прижатых к перегородке уплотняющими кольцами. Сам
преобразователь снабжён мембранами, одна из которых связана с объектом
возбуждения вибрации. При воздействии вибрации на мембрану через пористую
перегородку будет просачиваться полярная жидкость, направление движения которой
будет меняться в соответствии с приложенными вибрациями.
Контактные
предельные преобразователи
Данный тип преобразователей предназначен для дискретной регистрации
импульса сил инерции от линейного отрицательного ускорения, который действует
при ударе на объект.
Преимуществами контактных
предельных преобразователей являются:) Исключительная простота конструкции
и надёжность работы;) Возможность установки в любом месте испытуемого объекта;) Простота
градуировки чувствительного элемента;) Возможность регистрации закона
изменения ударной перегрузки во времени;) Простота съёма информации и
обработки результатов измерения.
Чувствительным элементом
такого преобразователя является крешерный столбик (рисунок 32). Ударное
ускорение характеризуется смятием крешерного столбика ударником определённого
веса в результате действия инерционных перегрузок при ударе объекта. Принцип
работы заключается в том, чтобы, зная форму, физико-механические свойства и
условия соударения тел, по величине смятия крешерного столбика аналитически
рассчитать ударное ускорение.
В предельных преобразователях
могут использоваться как стандартные крешерные столбики, так и столбики,
изготовляемые из крешернойпроволоки. При нагружениикрешерного столбика
необходимо учитывать его прочностные характеристики. Ударник должен иметь
определённый вес, чтобы в процессе его соударения с крешерным столбиком
последний не терял устойчивости упругого состояния.
Данный преобразователь имеет
алюминиевый корпус, в котором находятся 19 отверстий ячеек для установки медных
конических крешерных столбиков и инерционных ударников с пружинами. Крешерные
столбики неподвижны, а ударники имеют возможность перемещаться вследствие
различной длины ударников.
При установке крешерных
столбиков измеряют фактическую высоту каждого из них и свободный ход ударников.
После испытаний определяют максимальные деформации крешерных столбиков, начиная
с ударника, не имеющего возможности перемещения. Все данные сводятся в таблицу
для последующей расшифровки показаний преобразователя. На основании данных
строят зависимость изменения максимальной деформации крешерных столбиков от
перемещения ударника. Из полученного графика находят максимальные деформации,
по которым определяют энергию, затрачиваемую на сжатие пружин в предельном
преобразователе.
После этого определяют полную
энергию, затрачиваемую ударником на деформацию крешерного столбика и сжатие
пружины для каждого номера ударника. По полученным результатам находят основные
характеристики измеряемого ударного процесса.
Подводя общий итог датчиков,
основанных на динамическом принципе измерения, можно выделить их главный
недостаток - контактное измерение параметров вибрации, что приводит к сложности
установки датчика на объекте измерения, а также проведение измерений на
объектах, имеющих неблагоприятные условия, например, относительно высокая
температура. Всё это приводит к необходимости использования бесконтактных
датчиков, которые используют кинематический принцип измерения.
2.2
Кинематический принцип измерения
Кинематический принцип измерения основан на измерении изменения во
времени координат точек исследуемых объектов относительно вибрационной
неподвижной системы координат и углов между осями неподвижной системы и
системы, связанной с телом. Наличие этих параметров позволяет определить
мгновенное положение тела точно независимо от того, мало или велико его
перемещение в пространстве.
Приборы, основанные на кинематическом принципе, называются приборами
(измерителями) относительной вибрации. Среди них выделяются магнитные,
радиоволновые, оптические, электромагнитные, акустические, радиационные
измерители. Среди перечисленных в вибродиагностике наибольшее применение
получили оптические методы измерения. В свою очередь, оптические методы по
способу выделения информации делятся на амплитудные и частотные. К амплитудным
относятся фотоэлектрические и интерференционные методы измерения, к частотным -
методы измерения, основанные на эффекте Доплера.
Фотоэлектрические
методы
Основными представителями данного метода являются преобразователи
дифракционных методов измерения и оптоэлектронные преобразователи.
Преобразователи, использующие дифракционные методы, включают в свой
состав измерительное звено, которое состоит из элемента измерительного
сопряжения и фотоприёмника. В качестве измерительного сопряжения используют
измерительные растры, дифракционные измерительные решётки, штриховые меры,
кодовые решётки, которые обычно имеют периодическую структуру.
Измерительные растры (рисунок 34) в оптических системах выполняют в виде
решёток из линий или фигур, которые наносят на поверхность прозрачного или
отражающего материала. Эти растры подразделяют на амплитудные и фазовые.
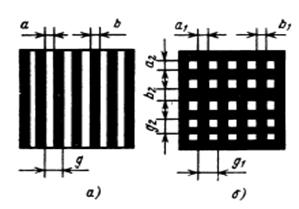
Рис. Измерительные растры:
Простейшее измерительное звено, работающее в проходящем свете и
позволяющее измерять перемещение, состоит из двух амплитудных измерительных
растров, которые располагают так, чтобы штрихи одного растра затеняли штрихи
другого, а оба растра размещены в свою очередь между источником света и
фотоприёмником (рисунок 35). Перемещение одного из растров приводит к изменению
освещённости за растровым полем, что и регистрируется фотоприёмником.
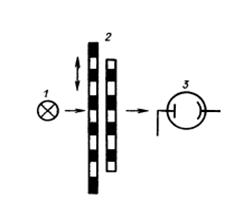
Рис. Измерительное звено с дифракционными растрами в проходящем свете:
На рисунке (36) показано измерительное звено с растром в отражённом
свете. При перемещении измерительного растра его изображение перемещается в
плоскости индикаторного растра. Фотоприёмник регистрирует световой поток,
который пропорционален перемещению измерительного растра. Чтобы получить
информацию о направлении перемещения необходимо наличие двух или трёх сигналов
от растрового звена, которые сдвинуты по фазе один относительно другого.
Направление перемещения определяется по направлению вращения вектора суммы
сигналов. виброметр колебание индукционный преобразователь
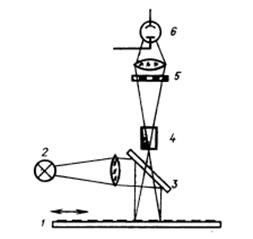
Рис. Измерительное звено с дифракционными растрами в отражённом свете:
Недостатком измерительных звеньев с дифракционными решётками является
малый диапазон измерений, определяемый длиной дифракционной решётки.
Одним из универсальных элементов, который способен осуществлять
преобразование различных физических величин, являются оптоэлектронные
преобразователи. Принцип действия такихпреобразователей заключается в том, что
измеряемая величина, воздействуя на оптический канал, изменяет параметр
излучаемого потока, который распространяется от источника к приёмнику.
Оптический канал чаще всего выполняется в виде двух световодов и
промежутка между ними. Поток излучений от источника попадает в передающий
световод, на выходе которого в зоне измерения формируется поток излучений,
затем часть потока попадает на вход приёмного световода, выводится из зоны
измерения к фотоприёмнику (фотодиоду) и преобразуется в пропорциональный
электрический сигнал.
Физическую основу работу оптоэлектронных преобразователей составляет
изменение интенсивности излучения, под действием измеряемого параметра,
проходящего с выхода передающего световода на вход принимающего.
Среди основных преимуществ такого преобразователя выделяется слабая
зависимость результатов измерения от температуры, электромагнитных полей
большой интенсивности и вибраций в зоне измерений, стойкость к агрессивным
средам и химическая инертность, высокая локальность измерений и, как уже было
выше сказано, бесконтактный способ получения информации.
Существует два типа волоконно-оптических преобразователя:
рефлектометрическийи проходящий.
Для первого типа как раз характерно отсутствие контакта с объектом
измерения. В нём поток излучения с выхода передающего световода направляется на
отражающую поверхность объекта и часть отражённого потока попадает на входной
торец приёмного световода. В этом случае выходной сигнал волоконно-оптического
преобразователя будет зависеть от расположения световодов относительно объекта.
Рассмотрим несколько случаев (рисунок 37). В начале торец световода
контактирует с отражающей поверхностью, в этом случае поток к фотоприёмнику
практически не доходит. Дальше будем увеличивать расстояние, тогда поток
излучения будет падать на большую площадь отражающей поверхности объекта, и она
станет вторичным “источником” излучения, который попадёт на приёмный световод.
При дальнейшем увеличении будет достигнут максимум, при котором на приёмный
световод будет попадать максимальный поток излучения. А затем, если продолжать
увеличивать расстояние, будут преобладать потери за счёт выхода отражённого
потока за пределы торца приёмного световода.
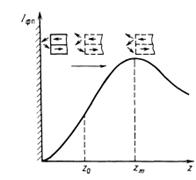
Рис. Формирование функции преобразования рефлектрометрического ВОП
аксиальных перемещений:
z0 -
центр участка наибольшей крутизны, zm - точка максимума.
Во втором типе волоконно-оптического преобразователя поток излучения,
выходящий с торца передающего световода, направляется на торец приёмного
световода и модуляция может осуществляться в двух случаях: изменением взаимного
расположения торцов световодов под действием физический величины или изменением
условий распространения потока между неподвижными каналами.
Работу такого преобразователя можно показать на примере ортогонального
перемещения торцов световода (рисунок 38). Если торцы параллельны и оси
совпадают, то поток будет максимальным, при ортогональном перемещении
начинается выход лучей и всё меньший поток попадает на входной торец приёмного
световода пока он и вовсе не станет равен нулю.
Таким образом использование волоконно-оптических преобразователей
рефлектометрического типа является более подходящим, так как является более
простым при анализе функции преобразования и практической реализации.
По способу получения измерительной информации рефлектометрические ВОП
подразделяются на следующие группы (рисунок 39): модуляция потока при
аксиальном движении отражающей поверхности, модуляция потока при угловых
перемещениях плоской отражающей поверхности, модуляция потока за счёт изменения
формы отражающей поверхности, модуляция потока за счёт ортогонального
перемещения границ поверхностей с различными отражающими свойствами, модуляция
потока при изменении поглощающих и рассеивающих свойств неподвижных
поверхностей.
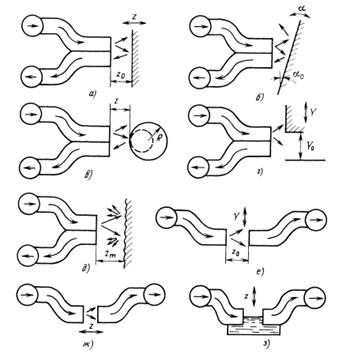
Рис. Способы получения измерительной информации с помощью ВОП.
Среди вышеперечисленных способов самым применяемым является модуляция
потока при аксиальном движении отражающей поверхности, реализованный в
бесконтактных преобразователях перемещений, толщины и расстояний.
Интерференционные
методы
Обширную группу виброметров составляют интерференционные измерители,
действие которых основано на явлении интерференции. Интерференцией волн
называют такое их взаимодействие, когда происходит перераспределение суммарной
энергии волн в пространстве и образование максимумом и минимумов объёмной
плотности энергии излучения.
Рассмотрим данные методы на примере лазерных интерференционных
виброметров. Они подразделяются на амплитудные, голографические и
спекл-интерферометрические. Действие данных виброметров основано на получении
информации, которая содержится в фазе световой волны, отражённой от вибрирующей
поверхности.
Прежде чем переходить непосредственно к работе виброметров, разберём
особенности оптической интерферометрии. Известно, что характерное время реакции
всех используемых приёмников оптического излучения значительно превышает период
световой волны. В связи с этим, фотоприёмники регистрируют только один
компонент светового сигнала - его интенсивность I, который определяется из формулы (17):

где Е - амплитуда волны, а φ - её фаза.
Может показаться, что информация о фазе световой волны бесследно
теряется, но существуют приборы, которые решают эту проблему. Эти приборы
(интерферометры) реализуют когерентный приём оптического сигнала  с помощью опорной волны
с помощью опорной волны . В них информация об исследуемом
объекте или процессе регистрируется за счёт точной фиксации именно фазы
световой волны. В области интерференции предметной и опорной волн суммарная
амплитуда равна (формула 18):
. В них информация об исследуемом
объекте или процессе регистрируется за счёт точной фиксации именно фазы
световой волны. В области интерференции предметной и опорной волн суммарная
амплитуда равна (формула 18):

а интенсивность (формула 19):

Для примера рассмотрим схему получения интерферограммыоптически
прозрачного объекта.
Луч лазера 1 с помощью полупрозрачного зеркала 2 разделяется на
составляющие. Коллиматоры 4 и 5 формируют соответственно опорный и предметные
пучки с плоским волновым фронтом.
В различных точках поверхности, где наблюдается интерференция, разность
фаз волн φ1- φ0 меняется из-за оптической задержки предметной волны в
различных участках просвечиваемого объекта.
В соответствии с изменением разности фаз, распределение интенсивности в
плоскости интерферограммымодулируется по гармоническому закону. Отсюда следует,
что фазовые сдвиги, которые вносятся объектом, кодируются на интерферограмме в
виде числа и местоположения интерференционных полос.
Также из формулы видно, что поглощающие свойства объекта влияют как на
амплитуду светового поля предметной волны Е1, так и на контраст
интерференционной картины μ (формула 20):
Из формулы видно, что контраст будет максимален при Е1→ Е0, а при
других вариантах величина μ падает. Отсюда следует, что
информация об оптической плотности объекта кодируется в виде контраста
интерферограммы, а форма интерференционных полос содержит сведения о
распределении фазовых задержек Δφ (формула 21) по сечению пучка:
где n1 - коэффициент преломления, l-геометрическая толщина объекта вдоль
каждого из лучей, проходящего через него.
Недостатком этого метода является узкий класс объектов, используемых для
изучения. Например, объекты, содержащие светорассеивающие объёмы и поверхности
будут непригодны. Это связано с трудностями, возникающими при интерференционном
сравнении опорных волновых фронтов, имеющих обычно простую конфигурацию, со
статически флуктуирующим полем, несущим информацию о светорассеивающем объекте.
Далее в качестве конкретного примера рассмотрим интерференционный
виброметр на основе счёта полос.
Интерференционный виброметр на основе счёта полос относится к типу
амплитудных. Виброметры такого типа строятся с неразведённым пучком излучения и
имеют в оптической схеме дополнительное малоразмерное зеркало, которое
закрепляется на поверхности исследуемого объекта.
Наибольшее распространение получили виброметры, включающие в свой состав
интерферометр Майкельсона и блок счёта интерференционных полос.
Структурная схема такого виброметра представлена на рисунке.
Он позволяет определять амплитуду виброперемещения методом счёта полос за
целое число периодов колебаний виброустановки. Для осуществления счёта
интерференционных полос сигнал с выхода фотоприёмника после катодного
повторителя поступает на вход электронного импульсного счётчика, который
работает в режиме пуска и остановки счёта внешними импульсами. Сигналы пуска и
остановки подаются на синхронизирующее устройство, которое запускается от
прямоугольных импульсов, период которых равен периоду колебания вибратора. В
результате сигнал поступает на счётчик числа периодов.
Саму амплитуду перемещения А определяют по числу интерференционных полос
из соотношения (22):

где n - число периодов колебаний, N-число полос, отсчитанное за все
периоды колебаний.
Для измерения виброскорости методом счёта периодов колебаний nсигнал на выходе фотоприёмника
фиксируется счётчиком периода колебаний пропорционально средней вибрационной
скорости. Фиксация производиться в течение периода времени, который
определяется частотой вибрации зеркала 4. В итоге средняя скорость вибрации
зеркала 4 определяется по формуле (23):
где T - период вибрации.
Методы,
основанные на эффекте Доплера
Доплеровские датчики вибрации наиболее полно реализуют идею бесконтактных
измерений. Так как доплеровский сдвиг частоты излучения, рассеянного на
движущихся частицах или поверхностях, относится к числу давно известных и
хорошо изученных явлений. Однако раньше из-за спектрометрических трудностей
можно было измерять лишь сравнительно большие скорости. Решить эту проблему
позволило использование лазерных источников излучения.
Лазерное излучение имеет лучшие характеристики в отношении расходимости и
интенсивности пучка, так как обладает высокой монохроматичностью. В этом
заключается его преимущество в отношении других источников излучения.
К достоинствам самих
доплеровских датчиков относятся:) локальность измерений;) возможность
проведения измерений в процессе сканирования пучка по всей поверхности
объекта;) возможность измерения параметров механических колебаний объектов
сложной формы, расположенных на значительном расстоянии от измерительной
системы;) высокая помехозащищённость и высокое отношение сигнал/шум.
Основные факторы, которые
ограничивают широкое использование доплеровских датчиков является глубокие
физико-математические основы метода, а также сложность и высокая цена
приборного обеспечения.
Тем не менее, применение
лазерных доплеровских источников излучения постепенно расширяется.
Доплеровские измерительные
системы используют для анализа движения исследуемого объекта изменение частоты
рассеянного излучения. Рассмотрим для примера лазерный доплеровский измеритель
скорости движения.
Излучения лазера с частотой v0 и
волновым вектором  фокусируется линзой 3 на диффузной поверхности,
движущейся со скоростью
фокусируется линзой 3 на диффузной поверхности,
движущейся со скоростью  , в пятно диаметром d. Рассеянный
свет с частотой vsи волновым вектором
, в пятно диаметром d. Рассеянный
свет с частотой vsи волновым вектором  собирается
линзой 5 с апертурной диафрагмой и фокусируется на приёмной площадке
фотоприёмника. Часть исходного лазерного излучения светоделителем направляется
на зеркало и, отразившись от него с помощью полупрозрачного зеркала,
смешивается со светом, рассеянным поверхностью.
собирается
линзой 5 с апертурной диафрагмой и фокусируется на приёмной площадке
фотоприёмника. Часть исходного лазерного излучения светоделителем направляется
на зеркало и, отразившись от него с помощью полупрозрачного зеркала,
смешивается со светом, рассеянным поверхностью.
Выражение для доплеровского
смещения частоты Δvв
первом приближении может быть представлено как (формула 24):

где  =-- вектор чувствительности датчика.
=-- вектор чувствительности датчика.
В соответствии с этой
формулой величина доплеровского смещения частоты прямо зависит от величины
проекции скорости движения точки поверхности на вектор чувствительности
измерителя.
С учётом того, что вектор
чувствительности по модулю  ,где λ - длина волны излучения лазера, выражение можно
представить в виде (формула 25):
,где λ - длина волны излучения лазера, выражение можно
представить в виде (формула 25):
где с - скорость света, α - угол между волновыми векторами освещения и наблюдения
исследуемой точки поверхности, β - угол
между вектором чувствительности датчика и вектором скорости движения точки
поверхности исследуемого объекта. Из этой формулы видно, что переменная
составляющая доплеровского смещения частоты определяется скоростью перемещения
объекта.
Сама переменная составляющая
доплеровского смещения частоты определяется из формулы (26) фототока:

где y - коэффициент,
учитывающий общее уменьшение интенсивности взаимодействующих излучений за счёт
расходимости, неидеальной когерентности, децентровки оптики и оптических
потерь, Δl-разность
хода опорного и объективного излучения до плоскости детектирования.
.3 Обоснование
выбора метода измерения параметров вибрации
В данном разделе были рассмотрены основные методы, позволяющие проводить
измерение параметров вибрации. Как было уже выше сказано, все методы можно
разбить на две обширные группы: динамические и кинематические.
Динамические методы измерения при всех своих преимуществах не способны
обеспечить бесконтактное измерение параметров вибрации, так как датчики,
реализующие эти методы, включают в свой состав инерционный элемент, который
сочленяется с объектом измерения.
Рассматривая интерференционные и доплеровские методы, необходимо
отметить, что данные методы имеют сложности при реализации, так как они
содержат глубокие физико-математические основы. А в случае с доплеровскими
датчиками ещё возникают проблемы с высокой стоимостью оборудования.
В связи со всем выше сказанным следует, что самыми практичными являются
фотоэлектрические методы. Так как датчики, в которых реализованы эти методы,
достаточно просты в реализации, а также не критичны к источникам излучения.
В данной работе будет использован фотоэлектрический датчик
рефлектометрического типа, для которого наиболее характерно отсутствие контакта
с объектом измерения или вспомогательным измерительным звеном, а также
способного измерять такие параметры вибрации, как виброперемещение,
виброскорость и виброускорение.
3. Разработка
структурной схемы и алгоритма работы измерителя вибрации
.1 Структура
датчика
Как было сказано ранее для бесконтактного измерения вибрации будет
использован фотоэлектрический датчик рефлектометрического типа. Возможность
измерения параметров вибрации этим методом связана с разработкой
соответствующей измерительной аппаратурой. Но прежде чем переходить к
непосредственной разработке устройства, необходимо определить структурную схему
будущего датчика.
Элементами структуры датчика являются:
a) источник излучения, который осуществляет освещение объекта
измерения. Каждый источник излучения характеризуется интенсивностью света,
которая под действием параметра вибрации изменяется и регистрируется
фотоприёмником;) фотоприёмник, предназначенный для преобразования
светового излучения в электрические сигналы;) блок обработки,
представляющий собой комплекс устройств, в котором происходят необходимые
электрические преобразования, математические расчёты и вывод на индикатор.
Структурная схема фотоэлектрического датчика рефлектометрического типа
представлена на рисунке (43).
На этой схеме видно, что поток излучения от источника попадает на
вибрирующий объект; свет, отражаясь от поверхности объекта попадает на
фотоприёмник, который преобразует его в электрический сигнал (фототок). Этот
сигнал затем направляется в блок обработки, где по заданному алгоритму
преобразуется в необходимый параметр. В результате значение этого параметра
направляется пользователю, где оно может быть выведено или на специальном
дисплее, или в окне разработанного приложения.
3.2 Алгоритм
работы
В этом подразделе будет описан алгоритм работы датчика, который
реализуется в блоке обработки.
Для того, чтобы получить пиковое значение параметра вибрации необходимо
найти его максимальное и минимальное значение. Для более простого расчёта
значения с АЦП сначала записываются в ячейки резидентной памяти
микроконтроллера 8051, имеющей адреса со 128 до 256. Так как одно значение с
АЦП храниться в двух байтах, максимально возможно хранить 64 значения.
Также возникает необходимость получать значение частоты вибрации. Для
этого все значения записываются через программно-регулируемый промежуток
времени, например, с помощью таймера. Далее с помощью простых арифметических
вычислений находится максимальное и минимально значение, а также и амплитуда
вибрации, которая пропорциональна пиковому значению виброперемещения. Дальше,
используя дифференциаторы, мы получаем пиковое значение виброскорости и виброускорения.
После этого, зная количество минимумов и промежутков времени между их
появлениями, легко получается период, а значит и частота вибрации. Блок схема
алгоритма представлена в Приложении 1.
4. Разработка
электрической принципиальной схемы
4.1
Требования к аналоговой части
Важным элементов датчика является фотоприёмник. Основными типами
фотоприёмников, применяемых в оптоэлектронных системах, являются
фотоумножители, фоторезисторы, фотодиоды и фототранзисторы.
Фотоумножители не используются в современных системах в виду больших
габаритов, сложности источника питания и высокой цены. Фоторезисторы имеют
большую постоянную времени, что также делает их мало пригодными. Поэтому в
основном применяются фотодиоды и фототранзисторы, но в свою очередь фотодиоды
имеют меньшие габариты и массу, низкое напряжение питания, малый потребляемый
ток и длительный срок работы на отказ. Поэтому в данной работе в качестве
фотоприёмника использовался фотодиод.
Среди параметров фотодиодов основными являются чувствительность,
быстродействие и уровень шума. Чувствительность отражает изменение
электрического состояния на выходе фотодиода при подаче на вход единичного
оптического сигнала. Количественно чувствительность измеряется отношением
изменения электрической характеристики, которая снимается на выходе
фотоприемника, к световому потоку или потоку излучения, вызвавшему его.
Находится она из следующей формулы (27):

Помимо полезного сигнала на выходе фотодиода появляется хаотический сигнал
со случайной амплитудой и спектром. Он называется шумом фотодиода. Он не
позволяет регистрировать сколь угодно малые полезные сигналы. Уровень шума
складывается из шумов полупроводникового материала и фотонного шума. Шумы
отрицательно влияют на получаемый сигнал, поэтому существуют несколько методов,
как их избежать, к таковым относятся экранирование и фильтрация.
Не менее важным параметром является быстродействие фотодиода, которое
зависит от времени нарастания фототока при воздействии на фотодиод импульса
оптической мощности. Также увеличить быстродействие можно путём уменьшения
толщины слоя для электрического тока с сохранением толщины для светового
потока. Этот способ реализуется в самой конструкции фотодиода.
4.2
Требования к АЦП
Наиболее важным узлом любого цифрового средства измерения является
аналого-цифровой преобразователь, так как именно он определяет основные
метрологические характеристики всего прибора. По этой причине к его основным
характеристикам предъявляются определённые требования, такими характеристиками
являются разрядность, быстродействие и интерфейс связи с вычислительным
модулем.
Разрядность характеризует количество дискретных значений, которые
преобразователь может выдать на выходе. В двоичных АЦП разрядность измеряется в
битах. Данная характеристика напрямую связана с диапазоном напряжений, которые
АЦП может преобразовывать. Так, например, при разрядности 10 бит, максимальное
напряжение будет равно 1,023 В. При увеличении разрядности, будет увеличиваться
диапазон напряжений, с которым сможет работать АЦП. Современные преобразователи
имеют разрядность от 10 до 24 бит.
Быстродействие АЦП характеризуется временем преобразования, то есть
интервалом времени от момента изменения сигнала на входе до появления на выходе
установившегося кода. По определению АЦП преобразовывает непрерывный во времени
аналоговый сигнал в последовательность цифровых значений, и происходит это с
некоторой частотой, которая называется частотой дискретизации. Таким образом,
значение сигнала измеряются через определённый интервал времени - период
дискретизации. Чем меньше это значение, тем выше быстродействие АЦП.
Важную часть АЦП составляют цифровые интерфейсы, которые обеспечивают
связь АЦП с вычислительным модулем. Структура интерфейса определяет способ
подключения преобразователя к микроконтроллеру, а также может влиять на уровень
частоты преобразования АЦП. Существует несколько интерфейсов используемых в
АЦП, основными из них являются SPI и I2C.
SPI
является синхронным последовательным интерфейсом, который предназначен для
высокоскоростного сопряжения микроконтроллеров и периферии. Данный интерфейс
относится к широко используемым интерфейсам для соединения микросхем. Работать
данный интерфейс может в режиме masterили
slave(ведущий и подчинённый), в качестве
ведущего обычно выступает микроконтроллер, а в качестве подчинённого могут
выступать запоминающие устройства, часы реального времени, АЦП/ЦАП и т.д.
Так как SPI является синхронным интерфейсом,
любая передача синхронизирована с общим тактовым сигналом, который генерирует
ведущее устройство. Принимающая периферия синхронизирует получение битовой
последовательности с тактовым сигналом. В одно и тоже время возможно
подключение нескольких подчинённых устройств. Ведущее устройство выбирает с кем
начать передачу данных, активируя сигнал CS (chipselect).
Другим используемым АЦП интерфейсом является I2C. Он представляет
собой синхронную последовательную шину, которая обеспечивает двустороннюю
передачу данных между подключёнными устройствами, используя две сигнальных
линии (SDAи SCL). Передача может быть, как одноадресной для одного
выбранного устройства, так и широковещательной. В обмене данными учувствуют два
устройства - ведущее и ведомое. Однако допускается наличие нескольких ведущих
или ведомых устройств.
Преимуществом I2C является то, что она остаётся
двухпроводной независимо от количества подключённых к ней устройств, также
данный интерфейс является более стандартизированным, поэтому избегается проблема
несовместимости.
4.3 Выбор АЦП
В процессе разработки бесконтактного измерителя вибрации использовалась
универсальная плата UNI-DS3, которая имеет в своём составе
12-битный аналого-цифровой преобразователь MCP 3204 с интерфейсом SPI.Прежде чем переходить к его использованию, нужно было
убедиться, что он позволит преобразовывать сигнал с частотой 1000 Гц , не
превышая погрешность в 20%.
Для начала проверим сколько можно сделать отсчётов, используя данный тип
АЦП. Частота колебания 1кГц соответствует периоду колебания в 1мс.
Согласно временной диаграмме, представленной на рисунке (44) видно, что
для обработки одного значения необходимо 40 тактов, каждый из которых занимает
время tsucs= 100 нс. В результате получается,
что для того, чтобы АЦП обработал одно значение необходимо 4 мкс, то есть за 1
мс возможно обработать 250 значений.
Теперь перейдём к расчёту погрешности. Получаемый сигнал в идеале по
своей форме будет представлять синусоиду. Максимальная погрешность будет
достигаться в той точке, где функция максимально нарастает. Известно, что
функция нарастает быстрее в той точке, где производная принимает максимальное
значение.
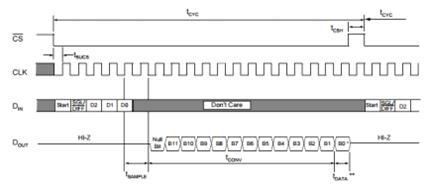
Рис.44. Временная диаграмма MCP 3204.
Погрешность находится из следующего соотношения:

где х - искомая погрешность.
Синусоиду можно представить в следующем виде (формула 29):

Для простоты будем считать, что U0=1, тогда производная будет выглядеть следующим образом (формула 30):

где ω = 2*π*f, в результате производная будет иметь следующий вид (формула
31):

Косинус максимален при нуле, отсюда следует, что U’max=6283, исходя
из суждений, представленных выше, ΔU=U’max.
Исходя из того, что на обработку одного значения необходимо 4 мкс,
итоговая погрешность находиться по следующей формуле (32):

Данное значение удовлетворяет нашему условию.
4.4 Описание
схемы преобразователя
Разработанная схема преобразователя представлена на рисунке (45).
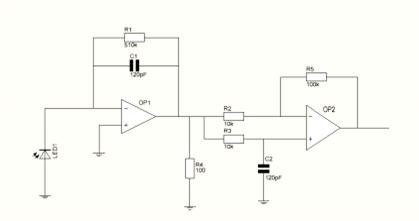
Рис. Схема преобразователя
Фототок, снимаемый с фотодиода LED1, поступает на операционный усилитель OP1. Он представляет собой инвертирующий усилитель с обратной
связью. В тоже время OP1
является преобразователем тока в напряжение.Как известно из теории операционных
усилителей, оба входа операционного усилителя не потребляют тока, поэтому фоток
проходит по обратной связи и по закону Ома (U=I*R) на выходе получается напряжение.
Каскад, куда входят OP1, R1 и C1 представляет собой фильтр нижних частот.
Для того, чтобы усилить полученное напряжение, используется второй
каскад. Он также представляет собой инвертирующий усилитель с обратной связью и
фильтр нижних частот. Коэффициент усиления находится по формуле UВых/UВх=R5/R2. Далее усиленное напряжение
подаётся на вход АЦП.
На рисунке (45) проиллюстрирована только схема преобразования напряжения
в виброперемещение. Полная схема устройства представлена в Приложении 2 и
Приложении 3.
5. Разработка
программного обеспечения
На основании разработанного алгоритма и принципиальной электрической
схемы, была написана программа на языке assembler. Был выбран именно этот язык, так
как он позволяет написать любую программу для процессора, которая будет весьма
компактна, а также возможен непосредственный доступ к аппаратуре, и, в
частности, портам ввода-вывода, регистрам процессора и др.
В качестве среды разработки использовалась программа multiRSCс программатором 8051 flashprogrammer, имеющаяся в учебной лаборатории
интеллектуальных систем управления и робототехники МИЭМ.
Согласно разработанному алгоритму, сигнал получаемый с фотодиода
необходимо преобразовать в цифровую форму, затем совершить преобразование
полученного значения и в конце вывести на LCD.
Приём данных происходит через интерфейс SPI, который предназначен для высокоскоростного
сопряжения микроконтроллеров и периферии. Данный интерфейс является синхронным,
так как любая передача синхронизирована с общим тактовым сигналом, который
генерирует ведущее устройство.
Для начала работы интерфейса SPI необходимо произвести его инициализацию, то есть установить значение для
регистра управления и регистра статуса, SPCRи SPSRсоответственно.
Рис. Процедура инициализации SPI.
После этого можно начать получать информацию с АЦП. Происходит это в
процедуре getVal (рисунок 47). Для начала необходимо
сбросить бит CSв нуль, это позволяет начать
получение значения, которое храниться в регистре данных SPDR. Запись числа происходит в 2 этапа,
сначала записывается левая часть четырёхзначного числа в переменную N1H, затем правая часть в переменную N1L.
Для корректной работы необходимо ждать пока закончиться обмен последовательными
данными, это обеспечивается битом SPIFрегистра статуса SPSR
(необходимо что бы данный бит установился в единицу). Данная задержка
содержится в процедуре ep, ep1 и ep2.
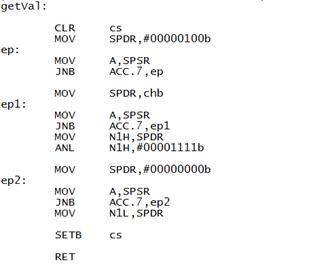
Рис. Процедура получения информации с АЦП.
После этого необходимо разбить число на цифры, чтобы была возможность
вывести значение на дисплей. Это происходит в процедуре outVal.
В данной процедуре число разбивается на тысячи, сотки, десятки и единицы.
В процедуре OBR происходит вывод числа на дисплей.
В качестве примера продемонстрируем подсчёт количества тысяч исходного
числа.
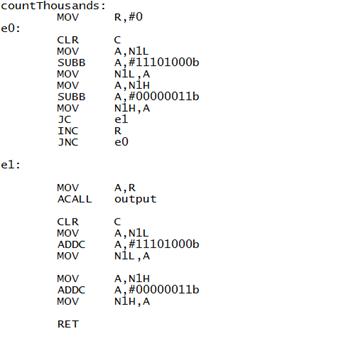
Рис. Процедура подсчёта количества тысяч.
Остальные процедуры подсчёта являются аналогичными данной.
После пересчёта числа его необходимо вывести на жидкокристаллический
дисплей. Происходит это в процедуре в SETCOMM (рисунок 50). Данный дисплей работает в 4-х битном режиме,
поэтому необходимо разбивать символ на 2 части и записывать его по 4 бита за
раз.
6. Разработка
программы и методики оценки метрологических и эксплуатационных характеристик
Для оценки метрологических и эксплуатационных характеристик использовался
динамик компьютерной колонки “Creative”. Применялся кинематический метод измерения: разработанное устройство
соединялось с динамиком, как показано на рисунке (51). В качестве источника
задающего сигнала использовался генератор Velleman.
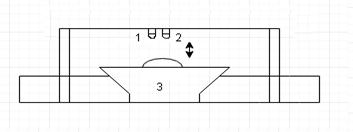
Рис. Схема соединения виброметра с динамиком:
Так как рассчитать вибрацию динамика невозможно, вследствие сложности его
конструкции, для калибровки по частоте использовался образцовый виброметр
Вибротест-МГ 4.01.
С помощью него были сняты значения виброперемещения с динамика на
диапазоне частот, указанном в ТЗ. После этого были получены зависимости виброперемещения
от напряжения на различных частотах, и уже с помощью этих значений была
откалибрована схема разработанного виброметра.
В результате после проведения лабораторных измерений разработанным
виброметром было установлено, что расхождение значений с Вибротестом-МГ 4.01 не
превышает 15%, что удовлетворяет нашим требованиям.
Заключение
Результатом работы является разработанный виброметр, позволяющий измерять
гармоническую вибрацию на частотах от 10 до 1000Гц с погрешностью не более 15%.
Данное устройство имеет более простую как техническую составляющую, так и
программную, по сравнению со своими аналогами.
Разработанный виброметр может использоваться для бесконтактного измерения
аксиальных вибрации различных объектов, для которых контактное измерение
вибрации может быть невозможным, ввиду неблагоприятных условий поверхности
объекта.
Дальнейшая работа в этой области предполагает расширение функционала
устройства, а именно хранение полученных значений параметров вибрации для
дальнейшего применения при решении тех или иных задач, а также доработка
алгоритма для возможности измерения нескольких гармоник сигнала.
Список
литературы
1. ГОСТ ИСО
10816-1-97. Вибрация. Контроль состояния машин по результатам измерений
вибрации на невращающихся частях. Часть I. Общие требования. - Введ.
1999-07-01. - М.: Изд-во стандартов, 1998. - 17с.
2. ГОСТ
30296-95 Аппаратура общего назначения для определения основных параметров
вибрационных процессов. Общие технические требования. - Введ. 1997-01-01. - М.: Издательство стандартов 1996. - 20c.
. Хоровиц
П., Хилл У. Искусство схемотехники. Т. 1. Издание 3-е, стереотипное. - М.:
Издательство “Мир”1960. - 600c.
. Иориш
Ю.И. Виброметрия. Измерение вибрации и ударов. Общая теория, методы и приборы.
Издание 2-е, переработанное, дополненное. - М.: Государственное
научно-техническое издательство машиностроительной литературы. 1963. - 773с.
. Зак
Е.А. Волоконно-оптические преобразователи с внешней модуляцией. - М.:
Энергоатомиздат, 1989. - 128с.
. Журавлев
О.А., Шапошников Ю.Н., Ивченко А.В. Лазерная виброметрия. - Самара:
Издательство СГАУ, 2006. - 72с.
. Приборы
и системы для измерения вибрации, шума и удара: Справочник. В 2-х кн. Кн. 1/Под
ред. В. В. Клюева. - М.: Машиностроение, 1978. - 448 с., ил.
Приложение