Разработка микронасоса
Оглавление
1. Введение
1.1 Постановка задачи
1.2 Актуальность
1.3 Новизна
2. Обзор микронасосов
2.1 Выбор класса микронасоса
2.2 Обзор аналогов
2.3 Проектирование и конструирование пьезоэлектрического насоса для
микрожидкостного устройства" Ким Х. и др. [3]
2.4 Схемное решение
3. Моделирование перистальтического пьезонасоса
3.1 Теория обратного пьезоэффекта
3.2 Аналитическое описание работы насоса
3.3 Численные расчеты толщин элементов
3.3.1 Работа с теоретическим диапазоном
3.3.2 Работа с реальным диапазоном
4. Создание действующего макета
4.1 Испытания элементов насоса
4.1.1 Измерение резонансных частот
4.1.2 Измерение ВАХ пьезоэлементов
4.1.3 Испытание юниморфа на деформацию
4.2 Испытания макета насоса
4.2.1 Испытание микронасоса на выходное давление
4.2.2 Измерение АЧХ пьезоэлементов
5. Заключение
Список использованной литературы
1. Введение
1.1
Постановка задачи
Работа выполнена в ФГБНУ "НИИ ПМТ" в рамках ФЦП
минестерства образования и науки РФ по теме "Разработка линейки
прецизионных пьезоэлектрических микронасосов точного дозирования с низким
энергопотреблением для перекачки медицинских жидкостей малого объема".
Цель работы: разработать макет миниатюрного пьезонасоса и
провести его испытание, разработать рекомендации по улучшению его функиональных
параметров.
В соответствии с целью работы были поставлены задачи,
выполнение которых приведет к достижению данной цели. Таковыми являются: выбор
класса микронасоса и изучение аналогов, изучение теории принципа работы и
создание математической модели для расчёта, аналитические и численные
эксперименты, включающие расчет параметров элементов насоса, конструкционный
расчет посадки рабочих элементов насоса в корпус, создание макета и подбор
оптимального режима работы, подготовка документации, необходимой для
производства рабочей модели насоса.
1.2
Актуальность
Проблема непрерывного перемещения жидкости с заданной
производительностью актуальна для создания микронасосов точного дозирования. В
настоящее время микронасосы находят применение в широком спектре областей:
медицине и космонавтике - как элементы инфузионных систем питания и
кровообращения; в биотехнологиях, генной инженерии и биохимии - для точного
дозирования препаратов; в микроэлектронике, нанотехнологиях и микрохирургии - в
устройствах вакуумного сопровождения технологических операций; в технике -
инжекторы дозированного впрыска красящих, топливных, смазочных жидкостей.
Непосредственно данная разработка призвана способствовать
медицинским процессам дозирования препаратов (откачка, транспортирование,
инвазия) в лабораторных условиях, в процессе операций, стационарно и мобильно.
1.3 Новизна
В данной работе применены новые специально разработанные
методики и программное обеспечение, построенное на их основе.
Проведена оптимизация рабочего объёма по геометрическим
параметрам деформируемых камер микронасоса.
Разработаны рекомендации для подбора толщин слоёв двухслойных
камер с конкретными материалами подложек.
микронасос перистальтический пьезоэлектрический насос
2. Обзор
микронасосов
2.1 Выбор
класса микронасоса
Для выбора класса микронасоса был проведен сравнительный
анализ таковых. Согласно исследованным литературным источникам и проведенным
патентным поиском, в основе конструкций разрабатываемых микронасосов лежат
шприцевые, мембранные с клапанами, перистальтические с импульсным возбуждением
и другие модели, построенные на различных физических и химических принципах,
описаны такие важные пункты как сферы применения микронасосов (на сегодняшний
момент и перспективные) и классификация насосов с указанием места микронасосов
в ней. Можно сказать, что пока нет насосов с плунжерным и реактивным принципом
действия [1].
Тем не менее многие из предлагаемых конструкций микронасосов
не могут удовлетворять медицинским требованиям, а некоторые конструкции насосов
отличаются значительной сложностью и большими массогабаритными
характеристиками.
Близкими к предлагаемой тематике исследований являются
механические микронасосы, использующие колебательное движение упругих элементов
для перекачивания жидкости. Мембраны и клапаны могут приводиться в движение
термически (термопневматические насосы), электростатически, магнитным полем и
за счет пьезоэлектрического эффекта.
На рисунке 2.1 показаны диаграммы производительности и
величины обратного давления в микронасосах с различными приводами [1].

Рисунок 2.1 а) - Диапазоны производительности на единицу
площади выходного отверстия для различных видов микронасосов б) - Диапазоны
обратного давления для различных видов микронасосов
Как можно видеть, наиболее широким диапазоном
производительности на единицу площади выходного отверстия и обратного давления
обладают микронасосы с пьезоэлектрическим приводом. Производительность
пьезонасоса составляет от 0,015 до 90,28 мл/мин при площади выходного отверстия
1 мм2. Такие насосы обеспечивают работу при обратном давлении от
0,12 до 200 кПа.
В работе [2] дан обзор разрабатываемых микронасосов более чем
46 авторами. В основе их лежит механический принцип построения конструкций,
большинство из которых имеют пьезоэлектрический привод. На рисунке 2.2
приведена схема работы микронасоса квазиперистальтического типа.

Рисунок 2.2 - Схема работы квазиперистальтического
микронасоса
Рабочие камеры сформированы двумя стеклянными пластинами. На
верхней пластине закреплены три пьезоэлемента (ПЭ). Система каналов и
псевдоклапанов образована травлением во внутренней кремниевой пластине. Под
действием переменного напряжения на ПЭ камеры последовательно изгибаются,
перенося объем жидкости из левой (на верхнем рисунке) в крайнюю правую (на
рисунке внизу). Отличие таких конструкций состоит в том, что в них нет клапанов
как отдельных узлов, роль клапанов выполняют верхняя и средняя пластины,
смыкаясь в определённых зонах рабочей камеры.
Разрабатываемые нами микронасосы используют перистальтический
принцип перемещения жидкостей или газов, близкий к естественному биологическому
способу работы пищевода, кишечника, мочеточников и др. в живых организмах.
Перемещение содержимого происходит за счёт волнообразного сокращения стенок
полых трубчатых каналов.
Преимущества создаваемых нами пьезоэлектрических микронасосов
заключаются в следующем. Это - точность дозирования, малые габариты, низкое
энергопотребление, отсутствие клапанов и трущихся деталей, простота
изготовления, возможность массового производства, бесшумность работы,
экологическая чистота, непрерывность подачи жидкостей различной вязкости или
газа, сохранность свойств перекачиваемого вещества, регулируемые давление и
производительность, возможность использования в вакуумных системах.
Непосредственно данная работа призвана создать
оптимизированные камеры, последовательная линейка которых образует собственно
насос. Крайне важно создать камеру, которая будет обеспечивать максимальную
эффективность и будет отвечать ряду требований, таких как безопасность,
функциональность, стабильность, надёжность, экономичность по материалам и
энергозатратам.
2.2 Обзор
аналогов
"Миниатюрный пьезоэлектрический перистальтический
насос", Бар-Кохен Йозеф и Зеншеу Чанг [2]
Данная работа оказалась крайне полезной для понимания
перистальтического движения, его создания и контроля. Разработанный авторами
микронасос лёг в основу нашей разработки. Забегая вперед можно сказать что мы
не используем резонансные частоты и работаем в квазистатической системе, однако
схожесть конструкции и движение, которое создается в насосе близки к
разрабатываемому нами насосу.
Рассматривая принцип работы пьезоэлектрического двигателя,
легко видеть формирование многократных камер между гребнями бегущей волны. Эти
камеры предлагают платформу для транспортировки полученного газа или жидкости в
направлении волнового распространения. Принцип работы нашего пьезонасоса
основан на использовании этих многократных камер, как показано схематично на рисунке
2.3 Чтобы иллюстрировать насосное действие, можно разработать насос, основанный
на двух синхронизируемых компенсационных статорах, которые служат стационарными
элементами диска, которые возбуждены индивидуально пьезоэлектрическими
приводами (рисунок 2.4). Волна перемещается синхронно в области прикосновения и
формирует многократные камеры, которые заполнены требуемым газом или жидкостью.
Камеры созданы, закрыты и перемещаются в закручивающемся движении, которое
может быть описано как эффект сжатия. Это перистальтическое синхронизируемое
действие волны не связано ни с какими физически подвижными частями и является
лишенным трения.

Рисунок 2.3 - Принцип действия предложенного
пьезоэлектрического насоса
Открытие каждой движущейся камеры между этими двумя статорами
определяет объемы камер. Важная особенность пьезонасоса - устранение
потребности в клапанах или других компонентов, которые могут вызвать
изнашивание. Накачанные жидкости или газы текут вдоль направленной волны.
Многократные камеры сформированы между двумя синхронно приводимыми в действие
статорами, которые прижаты друг к другу (как правило, проводимый на уровне
давления, по крайней мере, 1-2 кПа), чтобы произвести плотно запечатанное
пространство. Эти сложные поверхности насоса закрывают поток, когда насос
выключен, совершая автоблокировку, аналогично клапану.
Моделирование статора, который служит основанием для
пьезонасоса, было очень успешно. Кроме того, модальный анализ показал
превосходное соглашение между прикидочной и расчетной частотой резонанса
статора.

Рисунок 2.4 - Представление теоретического предсказания
частотной характеристики статора, который приведен в движение
пьезоэлектрическим приводом в режиме 4ой моды (слева) и экспериментальное
подтверждение с использованием интерферометрии.
Основанные на новом механизме перемещения объема, с использованием
упругой бегущей волны, и на результатах моделирования МКЭ, авторы разработали и
изготовили статор насоса и пластину изоляции из плексигласа. Пьезоэлектрическое
кольцо было прикреплено к металлическому кольцу, чтобы сформировать статор
диска насоса, пластмассовый "гид" жидкости, а силиконовая резина
использовались для герметизации канала жидкости в пределах камер насоса.

Рисунок 2.5 - Слева показаны сечение и вид сбоку
металлического кольца, справа - показан эскиз пьезоэлектрического кольца с
последовательностью полярности для активирования 4-й моды колебаний.
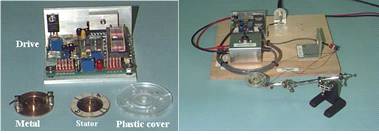
Рисунок 2.6 - Компоненты макета пьезонасоса
Выводы:
Пьезонасос, который был разработан как двигатель бегущей
волной, имеет пьезоэлектрическое кольцо соединённое со статором насоса, чтобы
вызвать упругие волны, бегущие вдоль металлического кольца статора.
Пространство между пиками волны использовано, чтобы перистальтическим образом
переместить воду вдоль волны. Части насоса были произведены, собраны, и
проверены, чтобы продемонстрировать работоспособность и возможность
осуществления концепции пьезонасоса. В настоящее время насос качает со
скоростью 3 мл в минуту с уровнем давления 1100 Па.
.3
Проектирование и конструирование пьезоэлектрического насоса для
микрожидкостного устройства" Ким Х. и др. [3]
Группа инженеров во главе с профессором Ким Х. разрабатывала
и совершенствовала насос собственной оригинальной конструкции, что было описано
в двух статьях. Данная статья примечательна данным в ней теоретическим
описанием.
Предлагаемый насос, используя несложные операции, работает
как вытеснительный механизм на основе перистальтического движения бегущей волны
без физического перемещения клапанов. Впрочем, этот пьезонасос представляет
радикальное решение, основанный на эксплуатации пьезоэлектрического двигателя.
Схемное решение представлено на рисунке 2.7

Рисунок 2.7 Принцип перистальтического движения бегущей волны
для предлагаемого пьезоэлектрического насоса.
Пьезоэлектрическая пластина способна создавать стоячие волны
высокой частоты. Пластины электрически сегментированы таким образом, что
смежные сегменты поляризованы в противоположных направлениях. Упругое тело, на
котором закреплены пьезоэлерические пластины, берет на себя роль статора в
пьезоактюаторе. В результате подачи постоянного напряжения на пластину,
изгибается упругое тело в форме положительной синусоидальной волны. Если
полярность напряжения изменить на противоположное, то изгиб упругого тела
произойдет в противоположном направлении образуя отрицательная синусоида.
Следовательно, стоячая волна генерирует непрерывное сгибание упругого тела взад
и вперед приложением переменного сигнала. Полная волны определяется двумя
сегментами.
Если есть четыре поляризованных сегмента, будет две стоячих
волны, находящиеся в фазе друг с другом. Стоячие волны могут быть объединены
для получения бегущих волн. Две сегментированных пьезоэлектрических пластины,
каждая с приводом от сети переменного тока с сигналом одинаковой частоты,
установлены таким образом, что сегменты одного смещены на половину сегмента по
отношению к другому. С двух сегментов получаем полную длину волны, а смещение
на половину сегмента вызывает стоячие волны одного элемента для перевода одной
четверти длины волны в противофазе со стоячими волнами другой. Адаптер
переменного сигнала подает на одну пластину синусоидальный сигнал, а на другую
пластину косинусную волну. Поэтому управляющие сигналы вызывают волны на
четверть длины волны вне фазы во времени. В результате этих сигналов,
комбинация двух стоячих волн с той же частотой, которые находятся в
пространственном и временном отношении одной четверти длины волны вне фазы
производит бегущую волну. Уравнение (2.1) представляет собой бегущую вправо
волну, как показано на рис. 2.8:

 (2.1)
(2.1)

Рисунок 2.8 - Процесс бегущей волны и эллиптического движения
На ATILA-моделировании (рисунок 2.9) выполняется оценка рабочей
частоты, колебательно-волновой режим, и оптимизация конструкции пьезонасоса,
такие как структура насоса, упругие материалы, пьезокерамики и Z-смещение
упругой бегущей волны.



Рисунок 2.9 - ATILA-симуляции работы пьезонасоса с различными
модами колебания. (a) 3 я мода волны (b) 4я мода волны. (c) 5я мода волны.
Максимальное измеренное значение скорости прокачки составляет
около 118 мкл/мин при следующих параметрах: 4-я мода колебаний, рабочая частота
50 кГц и пиковым напряжением 200 В.
2.4 Схемное
решение
На основе данных статей была создана схема насоса, который
будет иметь свойства двух классов микронасосов: динамических и
возвратно-поступательных. Статья-обзор D J Laser и J G Santiago дала
возможность провести выбор класса и принцип работы, а труды Бар-Кохен Йозефа,
Зеншеу Чанга и Ким Х. дали детальое описание как работать с волновой
деформацией, создавая истинно перестальтическое движение. От динамических
насосов будет взят принцеп неприрывности и плавности подачи перекачиваемой
жидкости, от возвратнопоступательных - тип дваижения пьезоэлементов и присущее
этому классу высокое давление на выходе.
Схема насоса, представленная на рискнке 2.10, состоит из
юниморфа (подложкии с ПЭ) и эластометного корпуса. данная конструкция обеспечит
плную гермитичность, и высокую производительность, выходное давление, и,
благодаря применению пьезокераки с высоким пьезомодулем поперечного отклика,
малую потребляемую мощность.

Рисунок 2.10 - концептуальный вид разрабатываемого насоса.
3.
Моделирование перистальтического пьезонасоса
3.1 Теория
обратного пьезоэффекта
Поляризованная вдоль по толщине (обычно вдоль оси Z)
пьезокерамическая пластина представляет собой трансверсально изотропное (или
монотропное) тело. Тогда плоскостью изотропии будет плоскость (XY).
Уравнения обратного пьезоэффекта в матричной форме имеют вид [28]:
{ej} = [sij] E×{sj} + [djn]
t×{En}. (3.1)
Здесь{ej} - вектор относительных деформаций, (j =
1,.,6);
{sj} - вектор механических напряжений от внешних и
внутренних сил;
[sij] E - матрица
податливости при постоянном электрическом поле E, обратная к матрице
жёсткости [cij] E, (i, j =
1,.,6);
{En} - вектор напряжённости электрического
поля (n = 1, 2,3);
[djn] t -
транспонированная матрица пьезомодулей.
Первое слагаемое в (3.1) - закон Гука, второе - обратный
пьезоэффект. В системе координат (XYZ), направления осей нумеруются: 1-X,
2-Y, 3 - Z.
Компоненты вектора относительной деформации могут быть
записаны в виде:
{ej} = {ex, ey, ez, gyz, gzx, gxy}t, (3.2)
где e1 = ex, e2 = ey, e3 = ez - линейные относительные
деформации вдоль осей X, Y, Z;
e4 = gyz, e5 = gzx, e6 = gxy - угловые деформации в
плоскостях YZ (^X), ZX, XY (^Z).
Верхний индекс t означает запись вектора строкой.
Вектор механических внутренних напряжений также имеет 6
компонент:
{sj} = {sx, sy, sz, tyz, tzx, txy}t, (3.3)
где s1= sx, s2= sy, s3= sz - нормальные напряжения
по осям X, Y, Z соответственно;
s4= tyz, s5= tzx, s6= txy - касательные напряжения
в плоскостях YZ, ZX, XY (^Z).
Матрица пьезомодулей (не транспонированная) для пьезокерамики
типа ЦТС (или PZT) используется в записи прямого пьезоэффекта. Она имеет
размер (3x6) с тремя независимыми пьезомодулями (одинаковые элементы матрицы
заменены):
 . (3.4)
. (3.4)
Здесь d32 = d31 - поперечные
пьезомодули (например, для PZT-5A имеют величину порядка d31
= - 170 пКл/Н или 10-12 м/В);
d33 - продольный пьезомодуль (его величина
примерно d33 = 370 пКл/Н);
d15 = d24 - сдвиговой
пьезомодуль (его величина порядка d15 = - 580 пКл/Н).
Для пьезокерамики американской фирмы APC значения линейных
пьезомодулей (в Кл/Н или м/В) лежат в следующих пределах:
31 = (-95. - 276) ×10-12; d33 =
(215.630) ×10-12.
Квадратная
симметричная матрица упругой податливости имеет размер (6x6), содержит пять
независимых компонент и имеет вид:
 . (3.5)
. (3.5)
Здесь
коэффициенты податливости s22 = s11; s23
= s13; s55 = s44 попарно
равны по свойству изотропии в плоскости [X (1), Y (2)].
Кроме того, в [7]
показано, что s66 = 2 (s11-s12).
А по свойству симметрии матрицы относительно главной диагонали: s21
= s12; s31 = s13; s32
= s23.
Таким образом, в
матрице податливости (3.5) из 12 ненулевых коэффициентов 5 являются
независимыми. Это: s11, s12, s13,
s33 и s44. Они обычно приводятся в
справочной литературе. Например, для пьезокерамики PZT-5A
коэффициенты податливости имеют следующие величины sE (м2/Н×10-12) [7]:
11 = 16,4; s12 = - 5,74; s13
= - 7,22; s33 = 18,8; s44 = 47,5.
Вектор
напряжённости электрического поля имеет три составляющих компонента и может
быть записан в виде транспонированного вектора:
= {En}
= {E1, E2, E3}t,
(3.6)
где составляющие E1,
E2, E3 - проекции вектора напряжённости
соответственно на оси X, Y, Z декартовой системы,
связанной с пьезоэлементом.
3.2
Аналитическое описание работы насоса
В основе построения математической модели лежат уравнения
обратного пьезоэффекта и теория изгиба двухслойных узких пластин,
представляющих стенки камеры пьезонасоса.
Модель микронасоса представляется двухслойной пластиной,
разделённой на участки, заданной длины. На части участков один из слоёв
выполнен из сравнительно тонких пьезокерамических пластин. При подаче
электрического напряжения пьезокерамическая пластина деформируется во всех
направлениях, но не одинаково. Поляризованная по толщине пьезокерамическая
пластина расширяется по толщине, если вектор напряжённости электрического поля EЭ
в ней совпадает по направлению с вектором начальной поляризации P0.
Расчётная схема одного участка двухслойной модели показана на
рисунке 3.1.
Нижний слой - подложка, выполнена из токопроводящего
материала, верхний слой - пьезокерамика. Приложенное напряжение U
создаёт напряжённость поля
Э = U/h, (3.7)
совпадающую с вектором P0. Здесь h -
толщина пьезоэлемента. Напряжение U считается положительным. Причём EЭ
= E3, а проекции E1 = E2=
0. На рисунке показаны: R0 - радиус кривизны, Vm
- максимальное поперечное перемещение.
Рисунок 3.1 - Расчетная схема двухслойного участка стенки
камеры
Пьезоэлектрические деформации свободного пьезоэлемента будут
следующими. По толщине относительная деформация составит
eY = d33×EЭ = d33×U/h, (3.8)
где d33 - продольный пьезомодуль, имеет
величину (215.630) ×10-12 Кл/Н или м/В для пьезокерамик
американской фирмы.
Абсолютное увеличение толщины составляет
Dh = h×eY = d33×U, (3.9)
которое, как видно, не зависит от начальной толщины h.
Свободная относительная деформация eX вдоль оси X от
пьезоэффекта определяется величиной поперечного пьезомодуля d31
согласно уравнению обратного пьезоэффекта:
eX = eПЭ = d31×EЭ. (3.10)
При этом пьезоэлемент сокращается по длине L и ширине b в
своей плоскости, т.к. пьезомодуль d31 < 0. Для
пьезокерамик APC значения пьезомодуля d31 лежат в пределах
(-95. - 276) ×10-12 Кл/Н или м/В.
Связанная с сокращающимся в плане пьезоэлементом подложка
изгибается вогнутостью вверх, как показано на рисунке 3.1 Кривизна χ = 1/r изгиба c радиусом кривизны r в этом случае считается
положительной.
При произвольной абсциссе x ордината y соответствует
прогибу V двухслойной балки, а угол φ - определяет наклон
касательной к оси X. При x = L прогиб будет максимальным Vm.
Деформации слоёв двухслойной, как и обычной балки при изгибе
распределены по высоте сечения линейно (гипотеза Бернулли), причём верхние слои
сжаты (e
< 0), а нижние растянуты (e > 0). При положительной кривизне c линейная функция от y
для полной деформации имеет вид:
e (y) = - cy + e0, (3.11)
где e0 - деформация нижнего слоя при z = 0, но
положение нейтрального слоя, где e = 0 пока неизвестно.
С другой стороны (физической) полная деформация складывается
из пьезоэлектрической и упругой eупр.:
e (y) = eПЭ + eупр. (y). (3.12)
В результате выражение для упругой деформации в слоях системы
будет:
eупр. (y) = e0 - cy - eПЭ (3.13)
Нормальные продольные напряжения в слоях с модулями Юнга Y1
и Y2 при изгибе определяются по закону Гука следующими
формулами:
s1 (y) = Y1eупр. (y) при 0 ≤ y ≤
h1 - для нижнего слоя 1,s2 (y) = Y2eупр. (y) при h1
≤ z ≤ h1 + h2 - для
верхнего слоя 2.
В пассивном слое 1 - подложке - пьезоэффекта нет (d31 = 0),
но для общности решения сохраним условное слагаемое пьезодеформации eПЭ1 в выражении для
нормальных напряжений (это позволит рассчитывать биморфные системы):
s1 (y) = Y1 (e0 - cy - eПЭ1). (3.14)
В активном слое 2 нормальные напряжения имеют аналогичный
вид:
s2 (y) = Y2 (e0 - cy - eПЭ2). (3.15)
Неизвестные χ и e0 определяются из
однородных уравнений равновесия.
Отсутствие внешних сил требует самоуравновешивания внутренних
продольных усилий в поперечных сечениях слоёв с площадью F1 и F2:
 . (3.16)
. (3.16)
В прямоугольных сечениях элементы площади dF1 = b1dy
и dF2 = b2dy. Тогда получаем первое
уравнение относительно c и e0:
 . (3.17)
. (3.17)
Здесь ордината y2 = h1 + h2.
Аналогично, отсутствие внешних изгибающих моментов даёт второе
уравнение:
 . (3.18)
. (3.18)
Из решения системы двух последних уравнений получаем формулу для
расчёта кривизны двухслойной системы с различными пьезомодулями слоёв при
следующих обозначениях:
eПЭ1 = d31
(1) U1/h1, eПЭ2 = d31 (2) U2/h2
- пьезоэлектрические деформации слоёв 1 и 2,G1 = Y1b1h1,
G2 = Y2b2h2
- жёсткости поперечных сечений слоёв.
Кривизна системы вычисляется по соотношению:
 (3.19)
(3.19)
Функция пьезоэлектрического прогиба двухслойной балки определяется
её кривизной и рассчитывается по формуле:
(x) = 0,5c×x2, (3.20)
которая при x = L даёт максимальный прогиб
m
= 0,5c×L2.
(3.21)
Функция угла наклона касательной как производная от прогиба по x:
j (y) = dv (x) /dx = c×x, (3.22)
как видно, линейная.
На конце x = L угол между касательной к оси балки и осью X
составит:
в радианах jm = c×L,
в градусах jm° = c×L×180°/p.
3.3 Численные
расчеты толщин элементов
В данном разделе представлены результаты численного
моделирования, выполненные в различных программных пакетах, таких как MS Excel,
МБВД [8], MathLab. Численное моделирование решало такие задачи как выбор
материала, определение толщин слоев и их оптимальное соотношение.
В качестве математической модели была выбрана двухслойная
консоль, слоя которой имеют разную ширину и толщину. Расчет проводились с тем
упрощением, что деформации предполагаются в плоскости.
3.3.1 Работа
с теоретическим диапазоном
Исследовалась функция кривизны для консольной модели
вычисляемая по формуле [11]:
 , (3.23)
, (3.23)
где: χ -
кривизна; Y1 - модуль упругости материала слоя 1; Y2
- модуль упругости материала подложки; h1 - толщина
пьезокерамического слоя (ПЭ); h2 - толщина слоя подложки; d31
- пьезомодуль материала ПЭ; E напряжённость внешнего поля,
прикладываемая к ПЭ.
Для исследования применялись пакеты Microsoft Excel и MathLab (для
получения матриц с более разрядными значениями) где вводилась функция от двух
переменных. При этом как результат получали матрицу значений функции кривизны и
строились графики поверхности.
Из оригинальной целевой функции сокращена ширина слоев, так как ее
влияние линейно изменяет жесткость. Данная формула (3.23) справедлива для
отношения значений ширин слоев 1:
. Аналогичная зависимость приведена в [5] при расчете
температурных деформаций биметаллических пластин.
Исследование функции кривизны от толщин слоев
В данном исследовании постоянными считались: пьезомодуль d31,
напряжённость поля E, модуль Юнга пьезокерамики Y1,
модуль Юнга подложки Y2. Переменными принимались толщины: h1
- пьезокерамики и h2 подложки.
Таблица 3.1 - Исходные физические и геометрические данные
исследуемой модели
|
Модуль упругости ПЭ Y1 (МПа)
|
6,50·104
|
|
Модуль упругости подложки Y2
(МПа)
|
1,27·105
|
|
Пьезомодуль ПЭ d31 (мм/В)
|
-2·10-7
|
|
Напряженность на ПЭ E (В/мм)
|
1500
|
|
Толщина ПЭ h1 (мм)
|
0,05…0,15 с шагом 0,001
|
|
Толщина подложки h2 (мм)
|
0,05…0,15 с шагом 0,001
|

Рисунок 3.2 - График поверхности фунции кривизны от толщин
слоёв
Поиск экстремумов функции кривизны от толщин
слоев
Данное исследование является продолжением исследования
функции кривизны от толщин слоев, представляет собой обработку полученных
данных (рисунок 3.2). Среди полученных данных производился поиск экстремумов
для функций с одной переменной (отдельно h1 и h2)
и построение графиков, как плоского h1 (h2)
(рисунок 3.3), так и трехмерного (рисунок 3.4).
Таблица 3.2 - Исходные физические и геометрические данные
исследуемой модели
|
Модуль упругости ПЭ Y1 (МПа)
|
6,50·104
|
|
Модуль упругости подложки Y2 (МПа)
|
1,27·105
|
|
Пьезомодуль ПЭ d31 (мм/В)
|
-2·10-7
|
|
Напряженность на ПЭ E (В/мм)
|
1500
|
|
Толщина ПЭ h1 (мм)
|
0,01…0,09 с шагом 0,001
|
|
Толщина подложки h2 (мм)
|
0,01…0,09 с шагом 0,001
|
Рисунок 3.3 - График распределения экстремумов функции
кривизны от толщин слоев в плоскости h1 h2

Рисунок 3.4 - Объёмный график экстремумов функции кривизны от
толщин слоёв
3.3.2 Работа
с реальным диапазоном
Теоретические исследования дают возможность проследить тренд
зависимостей, однако реалии инженерии не позволяют нам создавать элементы с
подобными параметрами, по этому для данного исследования был предложен диапазон
толщин, которые близки к реализации и задуманному конструкторскому решению.
Для оценки прогиба была использована приведенная кривизна:
 , (3.24)
, (3.24)
 (3.25)
(3.25)
В приведенных уравнениях χ* - приведенная кривизна, ΔПЭ = d31 (2) E2
- d31 (1) E1 - свободная
пьезоэлектрическая деформация, b - ширина слоя.
В таблицах 3.3 и 3.4 представлены значения приведенной кривизны,
не зависящей от пьезомодуля и приложенного напряжения. В таблицах полагается,
что пьезокерамика выполнена из ЦТС-19 и имеет модуль упругости Y = 61 ГПа, а
подложка из никеля и латуни с модулями упругости 210 ГПа и 105 ГПа
соответственно.
Таблица 3.3 - Значения приведенной кривизны Х* (1/мм) для
модели с подложкой, выполненной из никеля. Толщины h1 и h2
даны в мм.
|
h1\h2
|
0,05
|
0,08
|
0,1
|
0,15
|
0,2
|
0,3
|
h2_опт
|
Х*опт
|
|
0,05
|
8,620
|
3,886
|
2,532
|
1,117
|
0,616
|
0,266
|
0,0075
|
24,997
|
|
0,08
|
9,528
|
5,387
|
3,775
|
1,795
|
1,013
|
0,440
|
0,0125
|
15,618
|
|
0,1
|
9,122
|
5,837
|
4,310
|
2,189
|
1,266
|
0,558
|
0,015
|
12,499
|
|
0,15
|
7,436
|
5,806
|
4,773
|
2,873
|
1,802
|
0,844
|
0,0225
|
8,332
|
|
0,2
|
5,995
|
5,183
|
4,561
|
3,152
|
2,155
|
1,095
|
0,03
|
6,249
|
|
0,3
|
4,159
|
3,947
|
3,718
|
3,041
|
2,387
|
1,437
|
0,045
|
4,166
|
|
h1_опт
|
0,08
|
0,1
|
0,15
|
0,2
|
0,3
|
0,5
|
|
|
|
Х*опт
|
9,528
|
5,837
|
4,773
|
3,152
|
2,387
|
1,582
|
|
|
Таблица 3.4 - Значения приведенной кривизны Х* (1/мм) для
модели с подложкой, выполненной из латуни. Толщины h1 и h2
даны в мм.
|
h1\h2
|
0,05
|
0,08
|
0,1
|
0,15
|
0,2
|
0,3
|
h2_опт
|
Х*опт
|
|
0,05
|
11,412
|
5,985
|
4,131
|
1,968
|
1,126
|
0,503
|
0,015
|
21,496
|
|
0,08
|
10,857
|
7,133
|
5,389
|
2,884
|
1,731
|
0,799
|
0,02
|
13,435
|
|
0,1
|
9,835
|
7,168
|
5,706
|
3,309
|
2,065
|
0,984
|
0,03
|
10,748
|
|
0,15
|
7,475
|
6,353
|
5,539
|
3,804
|
2,626
|
1,377
|
0,45
|
7,166
|
|
0,2
|
5,824
|
5,355
|
4,917
|
3,791
|
2,853
|
1,654
|
5,349
|
|
0,3
|
3,880
|
3,862
|
3,737
|
3,278
|
2,770
|
1,902
|
0,08
|
3,578
|
|
h1_опт
|
0,0425
|
0,08
|
0,08
|
0,15
|
0,15
|
0,2
|
|
|
|
Х*опт
|
13,817
|
8,518
|
6,901
|
4,543
|
3,434
|
2,271
|
|
|
4. Создание
действующего макета
После проведения моделирования были созданы чертежи, по
которым были произведены все составляющие насоса по отдельности и в частичной
сборке: отдельные пьезоэлементы с контактными поверхностями и юниморфы с
различными материалами подложки. Корпус макета насоса производился на
производственных мощностях НИИ ПМТ, а так же окончательная сборка.
Данный раздел посвящён проведению испытаний и обработке
экспериментальных данных. Для установления эмпирических зависимостей и
практических данных были проведены многочисленные измерения отдельных элементов
насоса и его макета.
4.1 Испытания
элементов насоса
Данный подраздел описывает испытания пьезоэлементов,
отдельных и находящихся на юниморфах, для определения механических возможностей
пьезопривода и электрических зависимостей и показателей, а также для оценки
энергетических параметров.
4.1.1
Измерение резонансных частот
Теоретические сведения
Известно, что пьезоэлемент представляет собой смешанный
(последовательно-параллельный) контур (рисунок 4.1). Одновременное наличие
последовательного и параллельного контуров также означает наличие двух
резонансных частот - резонанс напряжений (для последовательного контура) и
резонанс токов, так же известного как "антирезонанс" (для
параллельного контура). Обычно эти резонансные частоты находятся на
незначительном расстоянии друг от друга по оси частот.

Рисунок 4.1 - Эквивалентная схема пьезоэлемента
Для нахождения этих частот для конкретного пьезоэлемента
необходимо обратиться к самому определению резонанса напряжений и токов в
контуре. Из радиотехники известно, что в момент резонанса напряжений полное
сопротивление последовательного контура становится минимальным, а общий ток в
цепи - максимальным (рисунок 4.2). Поэтому резонанс напряжений можно обнаружить
по резкому увеличению амплитуды напряжения на нагрузочном сопротивлении. Также
в момент резонанса наблюдается сдвиг фаз между напряжением и током в цепи на 90ْ.

Рисунок 4.2 - Схема и резонансные кривые для резонанса
напряжений
Резонанс токов легко отследить по току, потребляемому от
генератора. На пике резонансной частоты это ток становится максимальным
(рисунок 4.3).

Рисунок 4.3 - Схема и резонансные кривые для резонанса токов
Методика измерения и описание стенда
Как уже упоминалось выше, для определения резонансной и
антирезонансной частот можно использовать зависимости изменения напряжений и
токов в цепи пьезоэлемента. Для проведения замеров была использована схема,
изображенная на рисунке 4.4 Схема представляет собой контур, в который
последовательно включены: генератор, сопротивление и сам пьезоэлемент. Резистор
R1 служит для снятия зависимости тока в цепи. Первый канал осциллографа
подключен напрямую к выходу генератора, а второй канал снимает падение
напряжения на резисторе R1. При этом функция падения напряжения на резисторе R1
совпадает с функцией зависимости тока в цепи.

Рисунок 4.4 - Схема для измерения резонансных частот
пьезоэлемента
Алгоритм проведения опыта следующий:
. Прогреть осциллограф и генератор в течение 1 часа;
2. Собрать установку:
2.1. Выбрать схему базирования пьезоэлемента (свободная,
консольная, полностью зажатая);
2.2. Собрать стенд по выбранной схеме базирования.
3. Найти частоту резонанса:
.1. Установить частоту генератора на 1 кГц, форма сигнала
- синус;
3.2. Проконтролировать наличие двух синусоид на экране
осциллографа;
.3. Плавно увеличивать частоту генератора, при этом
контролируя амплитуду сигнала на втором канале осциллографа. После нахождения
верхнего экстремума функции удостовериться, что фазы напряжения и тока в цепи
сдвинулись на 90ْ;
3.4. Зафиксировать в протоколе частоту генератора, которая
соответствует максимальной амплитуде сигнала.
4. Найти частоту антирезонанса:
.1. Продвигаясь далее по частоте относительно ранее
найденной частоты резонанса, найти такую частоту, при которой падение
напряжения на резисторе R1 будет минимальным;
4.2. Зафиксировать полученную частоту в результатах
измерения.
Выбранный тип закрепления - консоль, представлен на рисунке
4.5.

Ðèñóíîê 4.5 - Êîíñîëüíàÿ
ñõåìà áàçèðîâàíèÿ
ïüåçîýëåìåíòà
Ñõåìà ñîáðàííîé
èçìåðèòåëüíîé
öåïè ïðåäñòàâëåíà
íà ðèñóíêå 4.6

Ðèñóíîê 4.6 - Ñõåìà
öåïè äëÿ èçìåðåíèÿ
ðåçîíàíñíûõ
÷àñòîò ïüåçîýëåìåíòà.
à - âûñîêî÷àñòîòíûé
ãåíåðàòîð; R1 - ñîïðîòèâëåíèå
1,13 Îì; Q1 - ÏÝ; ïðèñîåäèíåííûå
âåòâè - êîíòàêòû
îñöèëëîãðàôà,
íå âêëþ÷åííîãî
â ñõåìó äëÿ åå
óïðîùåíèÿ
Ðåçóëüòàòû
èçìåðåíèé
Íèæå ïðèâåäåíà
òàáëèöà ñ ïîëó÷åííûìè
ðåçóëüòàòàìè.
Òàáëèöà 4.1 - Ðåçóëüòàòû
èçìåðåíèÿ ðåçîíàíñíûõ
÷àñòîò è åìêîñòè
ÏÝ
|
¹ ÏÝ
|
Ñ, íÔ
|
Fð, êÃö
|
Xc, Îì
|
Fà, êÃö
|
|
1
|
43,85
|
145,8
|
24,89
|
155,2
|
|
2
|
44,76
|
155,3
|
22,90
|
164,9
|
|
3
|
41, 20
|
162,2
|
23,82
|
165,8
|
|
4
|
44,30
|
154,5
|
23,25
|
160,7
|
|
5
|
44,21
|
153,3
|
23,48
|
159,5
|
|
6
|
43,76
|
154,8
|
23,50
|
165,8
|
|
7
|
47,23
|
155,5
|
21,67
|
162,0
|
|
8
|
46,50
|
154,8
|
22,11
|
164,9
|
|
9
|
45,79
|
155,5
|
22,35
|
162,4
|
|
10
|
44,65
|
153,2
|
23,27
|
163,4
|
|
11
|
44,66
|
152,5
|
23,37
|
160,3
|
Ïðåäâàðèòåëüíî
èçìåðèòåëåì
èììèòàíñà Å7-20Ì,
èçìåðÿëàñü åìêîñòü
ÏÝ äëÿ ïîñëåäóþùèõ
ðàñ÷åòîâ ðåàêòèâíîãî
ñîïðîòèâëåíèÿ.
4.1.2
Измерение ВАХ пьезоэлементов
Èçìåðåíèÿ
âîëüò-àìïåðíîé
õàðàêòåðèñòèêè
îòäåëüíûõ ïðÿìîóãîëüíûõ
ïüåçîýëåìåíòîâ
áûëè ïðîâåäåíû
ñ öåëüþ óñòàíîâèòü
ïîòðåáëÿåìóþ
ìîùíîñòü ïðè
÷àñòîòàõ è íàïðÿæåíèè
êîòîðûå áûëè ðàíåå
óñòàíîâëåíû
êàê ðàáî÷èå (10
… 50 Ãö è 5 … 100 Â ñîîòâåòñòâåííî)
Îïèñàíèå
ñòåíäà è ìåòîäèêà
èçìåðåíèé
Äëÿ ïðîâåäåíèÿ
äàííûõ èçìåðåíèé
èñïîëüçîâàëàñü
öåïü, ïðèâåäåííàÿ
íà ðèñóíêå 4.6.

Ðèñóíîê 4.6 - ñõåìà
äëÿ ñíÿòèÿ ÂÀÕ
 äàííîé öåïè
îáîçíà÷åíî:
à - ãåíåðàòîð
âûñîêîâîëüòíûé
ìíîãîôàçíûé
äëÿ ìàòðè÷íûõ
ñòðóêòóð
À - ïðåöèçèîííûé
ìóëüòèìåòð Fluke
8508A èñïîëüçóåìûé
â êà÷åñòâå- ìóëüòèìåòð
Fluke 17B+1 - ïüåçîýëåìåíò
Ïüåçîýëåìåíò
çàêðåïëÿåòñÿ
â çàæèìå, ïðèâåäåííîì
íà ðèñóíêå 4.7

Ðèñóíîê 4.7 - Çàæèì
äëÿ âêëþ÷åíèÿ
ÏÝ â èçìåðèòåëüíóþ
öåïü
Ïîñëåäîâàòåëüíîñòü
ïðîâåäåíèÿ èçìåðåíèÿ:
. Ñáîðêà öåïè
2. Âêëþ÷åíèå
îáîðóäîâàíèå
è ïðîãðåâ â òå÷åíèå
15 ìèíóò.
. Ïîäà÷à ñèíóñîèäàëüíîãî
ñèãíàëà ÷àñòîòîé
10 Ãö è íàïðÿæåíèåì
5 Â (êîíòðîëü íàïðÿæåíèÿ
ïî âîëüòìåòðó)
. Ôèêñàöèÿ
ïîêàçàíèé àìïåðìåòðà.
. Ïîâòîð ïóíêòîâ
3-4 ñ èçìåíåíèåì
íàïðÿæåíèÿ 5 … 100 Â
ñ øàãîì 5 Â.
. Ïîâòîð ïóíêòîâ
3-5 ñ èçìåíåíèåì
÷àñòîòû 10 … 50 Ãö ñ
øàãîì 10 Ãö.
Ðåçóëüòàòû
èçìåðåíèé
Ïîñëå ïîëó÷åíèÿ
äàííûõ ðåçóëüòàòîâ
ñ íåñêîëüêèõ
ÏÝ áûëà ïðîâåäåíà
ñòàòèñòè÷åñêàÿ
îáðàáîòêà, ðåçóëüòàòîì
êîòîðîé ÿâëÿþòñÿ
òàáëèöà 4.2 è ãðàôèê
íà ðèñóíêå 4.8
Òàáëèöà 4.2 - ñðåäíåå
çíà÷åíèå òîêà
îò íàïðÿæåíèÿ
ïðè ðàçíûõ ÷àñòîòàõ
|
F, Ãö
|
10
|
20
|
30
|
40
|
50
|
|
V, Â
|
I, ìÀ
|
I, ìÀ
|
I, ìÀ
|
I, ìÀ
|
I, ìÀ
|
|
5
|
1,30
|
1,16
|
1,23
|
1,18
|
1,28
|
|
10
|
1,30
|
1, 19
|
1,25
|
1,18
|
1,25
|
|
15
|
1,30
|
1, 19
|
1,26
|
1,22
|
1,24
|
|
20
|
1,29
|
1,22
|
1,24
|
1,23
|
1,27
|
|
25
|
1,27
|
1,22
|
1,26
|
1,25
|
1,30
|
|
30
|
1,18
|
1,22
|
1,29
|
1,30
|
1,35
|
|
35
|
1,15
|
1,21
|
1,28
|
1,34
|
1,41
|
|
40
|
1,18
|
1,22
|
1,30
|
1,37
|
1,47
|
|
45
|
1,17
|
1,23
|
1,34
|
1,43
|
1,54
|
|
50
|
1, 20
|
1,26
|
1,39
|
1,49
|
1,63
|
|
55
|
1,25
|
1,29
|
1,47
|
1,57
|
1,74
|
|
60
|
1,26
|
1,33
|
1,54
|
1,69
|
1,88
|
|
65
|
1,27
|
1,40
|
1,66
|
1,84
|
2,11
|
|
70
|
1,29
|
1,52
|
1,87
|
2,17
|
2,51
|
|
75
|
1,34
|
1,77
|
2,31
|
2,90
|
3,59
|
|
80
|
1,45
|
2,18
|
3,17
|
4,33
|
5,37
|
|
85
|
1,61
|
2,67
|
3,94
|
5,40
|
6,89
|
|
90
|
1,78
|
3,07
|
4,54
|
6,13
|
7,81
|
|
95
|
1,94
|
3,42
|
5,02
|
6,71
|
8,53
|
|
100
|
2,11
|
3,68
|
5,43
|
7,21
|
9,10
|

Ðèñóíîê 4.8 - Ãðàôèêè
çàâèñèìîñòè
òîêà, ïðîòåêàþùåãî
÷åðåç ïüåçîýëåìåíòû,
îò íàïðÿæåíèÿ
ïðè ðàçëè÷íûõ
÷àñòîòàõ ïîñëå
ñòàòèñòè÷åñêîé
îáðàáîòêè
4.1.3
Испытание юниморфа на деформацию
Îïèñàíèå
è ñõåìà ñòåíäà

Ðèñóíîê 4.9 - Îáùèé
âèä èçìåðèòåëüíîãî
ñòåíäà
Äëÿ ïîëó÷åíèÿ
ãðàôèêîâ çàâèñèìîñòåé
ïåðåìåùåíèé
ïüåçîýëåìåíòîâ
îò ïîäàííûõ íàïðÿæåíèé
ïîäãîòîâëåí èçìåðèòåëüíûé
ñòåíä (ðèñóíîê
4.9), ñîñòîÿùèé èç:
) Ëàçåðíûé èçìåðèòåëü
ïåðåìåùåíèé
Keyence LC2400A.
) Ñåíñîðíûå
ãîëîâêè LC2420 è LC2450.
) Áëîê ïèòàíèÿ
"Á5 - 50"
) Êîîðäèíàòíûé
ñòîë ñ íåïîäâèæíûì
êðîíøòåéíîì
äëÿ êðåïëåíèÿ
ñåíñîðíîé ãîëîâêè
ëàçåðíîãî èçìåðèòåëÿ
ïåðåìåùåíèé.
) Öèôðîâîé ìèêðîñêîï,
ïîäêëþ÷àåìûé
ê êîìïüþòåðó.
) Ïåðñîíàëüíûé
êîìïüþòåð äëÿ
íàáëþäåíèÿ çà
îáðàçöîì ÷åðåç
öèôðîâîé ìèêðîñêîï
(íà ðèñóíêå íå
ïðåäñòàâëåí)
) Êîîðäèíàòíûé
ñòîëèê äëÿ çàêðåïëåíèÿ
öèôðîâîãî ìèêðîñêîïà.
Ðàñïîëîæåíèå
îáðàçöà ìîæíî
óâèäåòü íà ðèñóíêå
4.10.

Ðèñóíîê 4.10 - Ðàñïîëîæåíèå
îáðàçöà (1) íà êîîðäèíàòíîì
ñòîëèêå (2) ñ ïîäâåøåííîé
ãîëîâêîé ëàçåðíîãî
èçìåðèòåëÿ (3) è
ðàñïîëîæåííûé
ðÿäîì êîîðäèíàòíûé
ñòîëèê ñ öèôðîâûì
ìèêðîñêîïîì
(4)
Íàñòðîéêà
Keyence LC2400A
Äëÿ èçìåðåíèÿ
âåëè÷èí ïåðåìåùåíèé
ïüåçîýëåìåíòîâ
â çàâèñèìîñòè
îò ïðèëîæåííîãî
íàïðÿæåíèÿ áûë
âûáðàí ëàçåðíûé
èçìåðèòåëü ïåðåìåùåíèé
Keyence LC2400A.  îòëè÷èå îò
àíàëîãè÷íûõ
óñòðîéñòâ äðóãèõ
òèïîâ, äàííûé
ïðèáîð ïîçâîëÿåò
ïðîèçâîäèòü èçìåðåíèÿ
áåñêîíòàêòíûì
ìåòîäîì (îòñóòñòâóþò
ìåõàíè÷åñêèå
âîçäåéñòâèÿ
íà èçìåðÿåìûé
îáðàçåö).LC2400A (äàëåå
- èçìåðèòåëü ïåðåìåùåíèé)
ïîçâîëÿåò èñïîëüçîâàòü
íåñêîëüêî òèïîâ
ñåíñîðíûõ ãîëîâîê
ðàçíîé òî÷íîñòè.
Âûáîð òîé èëè
èíîé ñåíñîðíîé
ãîëîâêè çàâèñèò
îò îòðàæàòåëüíûõ
ñâîéñòâ èçìåðÿåìîé
öåëè (ïîâåðõíîñòè),
à òàêæå îò âåëè÷èí
èçìåðÿåìûõ ïåðåìåùåíèé.
 äàííîì èçìåðèòåëüíîì
ñòåíäå ïðèìåíÿþòñÿ
äâå ñåíñîðíûõ
ãîëîâêè. LC2420 îáëàäàåò
õîðîøåé òî÷íîñòüþ,
íî ïîçâîëÿåò ïðîâîäèòü
èçìåðåíèÿ â âåñüìà
óçêîì äèàïàçîíå
±300 ìêì. Êðîìå òîãî,
îí ïðåäíàçíà÷åí
äëÿ èçìåðåíèÿ
òåë ñ âûñîêèìè
îòðàæàòåëüíûìè
ñïîñîáíîñòÿìè.
Ñåíñîðíàÿ ãîëîâêà
LC2450 ïîçâîëÿåò ïðîèçâîäèòü
èçìåðåíèÿ ïåðåìåùåíèé
òåë ñ ìàòîâûìè
ïîâåðõíîñòÿìè
(ñåðåáðÿíûé ýëåêòðîä)
â áîëåå øèðîêèõ
ïðåäåëàõ (±8 ìì). Ñåíñîðíàÿ
ãîëîâêà âûñòàâëÿåòñÿ
ïîä óãëàìè 90° ê öåëè
(äëÿ ýòîãî èñïîëüçóþòñÿ
ïîâåðõíîñòè
êîðïóñà 2) è çàêðåïëÿåòñÿ
íà êðîíøòåéíå
øòàòèâà ñ âûñîêîé
òî÷íîñòüþ ïðè
ïîìîùè âèíòîâ.
Äëÿ ýòîãî â êîðïóñå
ñåíñîðà ïðåäóñìîòðåíû
òðè îòâåðñòèÿ
1. Ñõåìà óñòàíîâêè
ñåíñîðíîé ãîëîâêè
ïðèâåäåíà íà
ðèñóíêå 4.11.

Ðèñóíîê 4.11 - Óñòàíîâêà
ñåíñîðíîé ãîëîâêè
Ïîñëå çàêðåïëåíèÿ
ñåíñîðíîé ãîëîâêè
íà øòàòèâå íåîáõîäèìî
ïðîèçâåñòè íàñòðîéêó
äèñòàíöèè ìåæäó
ñåíñîðíîé ãîëîâêîé
è èçìåðÿåìûì
îáðàçöîì. Äëÿ ýòîãî
ñëåäóåò ïåðåìåñòèòü
êðîíøòåéí â òàêîå
ïîëîæåíèå, ïðè
êîòîðîì èíäèêàòîð
íà âåðõíåé ÷àñòè
ñåíñîðà çàãîðèòñÿ
çåë¸íûé öâåò.
Îðàíæåâûé ñâåò
èíäèêàòîðà ãîâîðèò
î òîì, ÷òî ïîëîæåíèå
ñåíñîðíîé ãîëîâêè
ïîäîáðàíî íå ïðàâèëüíî.
Òàêæå äëÿ íàñòðîéêè
ìîæíî èñïîëüçîâàòü
èíäèêàòîðû íà
ëèöåâîé ïàíåëè
èçìåðèòåëÿ ïåðåìåùåíèé
(ðèñóíîê 4.12) - ñâåòîäèîäû
HIGH 9 è LOW 7 ñîîáùàþò
î âûõîäå çà ïðåäåëû
èçìåðåíèÿ, èíäèêàòîð
GO 8 ñîîáùàåò î ãîòîâíîñòè.
Äëÿ êîìïåíñàöèè
ïîãðåøíîñòåé
óñòðîéñòâî îòîáðàæàåò
óñðåäí¸ííîå
çíà÷åíèå èçìåðåíèé,
çàâîäñêàÿ íàñòðîéêà
- ñðåäíåå îò 2400 èçìåðåíèé.
Äëÿ äîñòèæåíèÿ
áîëüøîé òî÷íîñòè
ñëåäóåò çàäàòü
ìåíüøåå ÷èñëî
çíà÷åíèé äëÿ
óñðåäíåíèÿ, íî
ïðè ñëèøêîì ìàëîì
êîëè÷åñòâå çíà÷åíèé
â èçìåðåíèÿõ
ïîÿâèòñÿ "øóì".
Ñäåëàòü ýòî âîçìîæíî
íàæèìàÿ êíîïêó
AVERAGE. Êàê ïðàâèëî,
â äàííîì ñòåíäå
ïðè ðàçëè÷íûõ
èçìåðåíèÿõ äàííûé
ïàðàìåòð èìååò
çíà÷åíèå 512.

Ðèñóíîê 4.12 - Ëèöåâàÿ
ïàíåëü Keyence LC2400A
Ëàçåðíûé èçìåðèòåëü
ïåðåìåùåíèé
ïðîèçâîäèò èçìåðåíèÿ
îñíîâûâàÿñü
íà èíòåíñèâíîñòè
îòðàæàåìîãî
îáðàçöîì ñâåòà.
Òàê êàê äàííûé
ïàðàìåòð çàâèñèò
îò îòðàæàòåëüíûõ
ñïîñîáíîñòåé
èçìåðÿåìûõ ïîâåðõíîñòåé,
íåîáõîäèìî íàñòðîèòü
÷óâñòâèòåëüíîñòü
ñåíñîðà. Ó èçìåðèòåëÿ
ïåðåìåùåíèé
ñóùåñòâóåò ÷åòûðå
ðåæèìà ÷óâñòâèòåëüíîñòè
(ñì. ðèñóíîê 4.13), âûáîð
ïðîèçâîäèòñÿ
íàæàòèåì êíîïêè
GAIN íà ëèöåâîé ïàíåëè
ïðèáîðà.  ñëó÷àå
âûáîðà ðåæèìà
AUTO ïðèáîð àâòîìàòè÷åñêè
îïðåäåëèò ïðåäïî÷òèòåëüíóþ
÷óâñòâèòåëüíîñòü.

Ðèñóíîê 4.13 - Íàñòðîéêà
÷óâñòâèòåëüíîñòè
ñåíñîðíîé ãîëîâêè
Ïåðåä íà÷àëîì
èçìåðåíèé ðåêîìåíäóåòñÿ
ïðîãðåòü ïðèáîð
â òå÷åíèå 60 ìèíóò.
Äëÿ íà÷àëà èçìåðåíèé
íåîáõîäèìî âûáðàòü
ðåæèì NORMAL, òåêóùåå
èçìåðåíèå áóäåò
îòîáðàæàòüñÿ
íà èíäèêàöèîííîé
ïàíåëè èçìåðèòåëÿ
ïåðåìåùåíèé.
Ëàçåðíûé ëó÷
íàïðàâëÿåòñÿ
ïåðïåíäèêóëÿðíî
ê ïîâåðõíîñòè
ïüåçîýëåìåíòà
è âûñòàâëÿåòñÿ
â òî÷êó, ïîïåðå÷íûå
ïåðåìåùåíèÿ êîòîðîé
òðåáóåòñÿ èçìåðèòü.
Äàëåå ñëåäóåò
çàäàòü íà÷àëî
êîîðäèíàò (íóëåâàÿ
òî÷êà) ïðè ïîìîùè
ôóíêöèè ZERO. Ïðèáîð
ãîòîâ ê èñïîëüçîâàíèþ
è îòîáðàæàåò
ïåðåìåùåíèÿ íà
äèñïëåå.
Îïèñàíèå
ïðîöåäóðû èçìåðåíèÿ
Íèæå îïèñàí
õîä ïðîâåäåíèÿ
èñïûòàíèé ïüåçîýëåìåíòîâ.
Øàã 1 - Âûáîð
è óñòàíîâêà ñåíñîðà
â çàâèñèìîñòè
îò âåëè÷èíû ïðåäïîëàãàåìûõ
ïåðåìåùåíèé,
à òàêæå îòðàæàòåëüíûõ
ñïîñîáíîñòåé
èçìåðÿåìîãî
îáðàçöà.
Øàã 2 - Ïðîâåðêà
êîððåêòíîñòè
ïîäêëþ÷åíèÿ âñåõ
ïðèáîðîâ. Ïîäêëþ÷åíèå
ê ýëåêòðîñåòè,
çàçåìëåíèå. Ïîäêëþ÷åíèå
ñåíñîðíîé ãîëîâêè.
Øàã 3 - Çàêðåïëåíèå
èçìåðÿåìîãî
îáðàçöà íà ñòîëèêå,
ïîäêëþ÷åíèå ê
áëîêó ïèòàíèÿ.
Øàã 4 - Âêëþ÷åíèå
èçìåðèòåëÿ ïåðåìåùåíèé
è åãî ïðîãðåâ â
òå÷åíèå øåñòèäåñÿòè
ìèíóò. Íàñòðîéêà
÷óâñòâèòåëüíîñòè,
êîëè÷åñòâà óñðåäíåíèé.
Øàã 5 - Âêëþ÷åíèå
áëîêà ïèòàíèÿ
è ïðîãðåâ â òå÷åíèå
ïÿòíàäöàòè ìèíóò.
Øàã 6 - Ïåðåìåùåíèå
îáðàçöà ïðè ïîìîùè
êîîðäèíàòíîãî
ñòîëèêà èç èñõîäíûõ
êîîðäèíàò (10; 15) (ðèñóíîê
4.14) â êîîðäèíàòû
ïåðâîãî èçìåðåíèÿ
(9; 14) (ðèñóíîê 4.15).

Ðèñóíîê 4.14 - Óñòàíîâêà
îáðàçöà â êîîðäèíàòû
(10; 15)

Ðèñóíîê 4.15 - Óñòàíîâêà
îáðàçöà â êîîðäèíàòû
(9; 14).
Øàã 7 - Óñòàíîâêà
òî÷êè íà÷àëà
êîîðäèíàò ïðè
ïîìîùè êíîïêè
ZERO íà ëèöåâîé ïàíåëè
èçìåðèòåëÿ ïåðåìåùåíèé.
Øàã 9 - Ïîäà÷à
íàïðÿæåíèÿ íà
îáðàçåö ñ ãåíåðàòîðà.
Øàã 10 - Ñíÿòèå
äàííûõ ñ èçìåðèòåëÿ
ïåðåìåùåíèé
è ïåðåíîñ èõ â
òàáëèöó Excel.
Øàã 11 - Îòêëþ÷åíèå
ãåíåðàòîðà è
îæèäàíèå âîçâðàòà
îáðàçöà â èñõîäíîå
ïîëîæåíèå (ñâÿçàíî
ñ îñòàòî÷íûìè
äåôîðìàöèÿìè).
Øàã 12 - Ïåðåìåùåíèå
îáðàçöà ïðè ïîìîùè
êîîðäèíàòíîãî
ñòîëèêà â êîîðäèíàòû
ñëåäóþùåãî èçìåðåíèÿ
(8; 14).
Äàëåå øàãè
5-12 ïîâòîðÿþòñÿ
äî äîñòèæåíèÿ
êîîðäèíàò (1;
). Äàëüíåéøèå
èçìåðåíèÿ çàòðóäíÿþòñÿ
íàëè÷èåì ýëåêòðîäà
íà ïîâåðõíîñòè
ÏÝ.
Àíàëèç ðåçóëüòàòîâ
Ïîëó÷åííûå
äàííûå ïðåäñòàâëÿþò
ñîáîé ïîëîâèíó
ÏÝ. Â ñâÿçè ñ ýòèì
ïîëó÷åííûå çíà÷åíèÿ
îòðàæàþòñÿ îòíîñèòåëüíî
ñåðåäèíû ÏÝ, è
ñòðîèòñÿ ãðàôèê
ïîâåðõíîñòè.
Áûëî èññëåäîâàíî
òðè ïüåçîýëåìåíòà
ñ ìàðêèðîâî÷íûìè
íîìåðàìè 84, 85, 86. Êàê
ðåçóëüòàò áûëè
ïîëó÷åíû ìàòðèöû
çíà÷åíèå ïåðåìåùåíèÿ
òî÷åê ñ êîîðäèíàòàìè
{ (1;1): (9;7) }. Äàëåå äëÿ âñåõ
òî÷åê ñ îäèíàêîâûìè
êîîðäèíàòàìè
áûëî âçÿòî ñðåäíåå
àðèôìåòè÷åñêîå
è ñîçäàíà íîâàÿ
ìàòðèöà. Ãðàôèê
ïîâåðõíîñòè
åå çíà÷åíèé ïðèâåäåí
íà ðèñóíêå 4.16
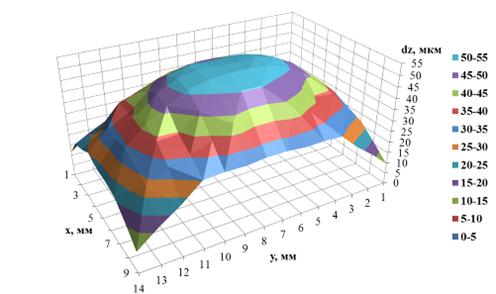
Ðèñóíîê 4.16 - Ãðàôèê
ïîâåðõíîñòè
ïðîãèáîâ òî÷åê
ñ êîîðäèíàòàìè
(õ; ó) ïîñëå ñòàòèñòè÷åñêîé
îáðàáîòêè äàííûõ
4.2 Испытания
макета насоса
Îïèñàíèå
ìàêåòà ïüåçîíàñîñà
Ìàêåò ïüåçîýëåêòðè÷åñêîãî
íàñîñà, ïîêàçàííûé
íà ðèñóíêå 4.17, âêëþ÷àåò
ïëàñòèíó-îñíîâàíèå
1, øòóöåðû 2, ãèáêóþ
ìåìáðàíó 3, ïüåçîïðèâîä
4, ïðèæèìíûå ðåéêè
5, ëåïåñòêè 6, ïîäæèìíûå
êîíòàêòû 7, à òàêæå
ýëåìåíòû êðåïåæà.

Ðèñóíîê 4.17 - Ìàêåò
ïüåçîíàñîñà
Ïëàñòèíà-îñíîâàíèå
1 íà îäíîé èç ãðàíåé
èìååò êàìåðó
(âûðåç) äëÿ ïðîêà÷êè
æèäêîñòè (ãëóáèíà
êàìåðû 120 ìêì, øèðèíà
14 ìì), à òàêæå ââîäíîé
è âûâîäíîé Ã-îáðàçíûå
êàíàëû äëÿ ïîäà÷è
è îòâîäà æèäêîñòè.
 êàíàëàõ, ñ òîðöåâûõ
ñòîðîí îñíîâàíèÿ,
äëÿ ïðèñîåäèíåíèÿ
ãèáêèõ òðóáîê
ïðåäóñìîòðåíû
øòóöåðû 2. Ãèáêàÿ
ìåìáðàíà 2 ðàçìåùàåòñÿ
íà îñíîâàíèè
1 ñî ñòîðîíû êàìåðû
è ãåðìåòèçèðóåòñÿ
ñèëèêîíîâûì
ãåðìåòèêîì.
Ïüåçîïðèâîä
(4) ïðåäñòàâëÿåò
ñîáîé ïîäëîæêó
èç íåðæàâåþùåé
ñòàëè, ñ ïðèïàÿííûìè
ïüåçîýëåìåíòàìè
ïðÿìîóãîëüíîé
ôîðìû. Òîëùèíà
ïîäëîæêè ñîñòàâëÿåò
50 ìêì, òîëùèíà
ïüåçîýëåìåíòîâ
100 ìêì.
4.2.1
Испытание микронасоса на выходное давление
Îïèñàíèå
è ñõåìà ñòåíäà
Äëÿ îïðåäåëåíèÿ
îïòèìàëüíûõ
ïàðàìåòðîâ óïðàâëÿþùåãî
ñèãíàëà áûë ïîäãîòîâëåí
èñïûòàòåëüíûé
ñòåíä, ïîêàçàííûé
íà ðèñóíêå 4.18. Ñòåíä
ñîñòîèò èç ìàêåòà
ïüåçîýëåêòðè÷åñêîãî
íàñîñà 1, òðóáîê
äëÿ ïåðåêà÷èâàíèÿ
æèäêîñòè 2, ðåçåðâóàðà
ñ âîäîé 3, äâóõ øòàòèâîâ
4 (ñëóæàò äëÿ ïîäâåñà
òðóáîê 2 è ðåçåðâóàðà
3), ëèíåéêè 5 äëÿ èçìåðåíèÿ
óðîâíÿ âîäû â òðóáêàõ,
ìíîãîôàçíîãî
âûñîêîâîëüòíîãî
ãåíåðàòîðà ñèãíàëîâ
6 ïîäêëþ÷¸ííîãî
ê ïåðñîíàëüíîìó
êîìïüþòåðó, à
òàêæå ñîåäèíèòåëüíûõ
ïðîâîäîâ.

Ðèñóíîê 4.18 - Ñòåíä
äëÿ èñïûòàíèé
ìàêåòà ïüåçîíàñîñà
Òàêæå äëÿ ïðîâåäåíèÿ
îïûòîâ òðåáóåòñÿ:
øïðèö îáúåìîì
10 ìë, íåîáõîäèìûé
äëÿ ïðîêà÷êè æèäêîñòè
÷åðåç ñèñòåìó,
ãðàäóñíèê äëÿ
èçìåðåíèÿ êîìíàòíîé
òåìïåðàòóðû è
ïèðîìåòð FLUKE 561 äëÿ
çàìåðà òåìïåðàòóðû
âîäû â ðåçåðâóàðå
è êîíòðîëÿ íàãðåâà
ïüåçîïðèâîäà
â ïðîöåññå ðàáîòû.
Ìåòîäèêà
èñïîëüçîâàíèÿ
ãåíåðàòîðà ïðè
ïðîâåäåíèè èñïûòàíèé
ìàêåòîâ íàñîñà
Ïðè èñïûòàíèÿõ
ìàêåòîâ ìèêðîíàñîñà
èñïîëüçîâàëñÿ
"âûñîêîâîëüòíûé
ìíîãîôàçíûé
ãåíåðàòîð äëÿ
ìàòðè÷íûõ ñòðóêòóð"
äàëåå èìåíóåìûé
êàê "ãåíåðàòîð"
Ìàêåò ïüåçîíàñîñà
(ñ ïðèïàÿííûìè
ïðîâîäàìè) ïîäêëþ÷àåòñÿ
ê ãåíåðàòîðó.
Ïðîâåðÿåòñÿ ñîåäèíåíèå
ãåíåðàòîðà è
óïðàâëÿþùåãî
ÏÊ. Çàòåì ïðîèçâîäèòñÿ
çàïóñê ãåíåðàòîðà
è ÏÊ.
Ãåíåðàòîð
ïðîãðåâàåòñÿ
â òå÷åíèå 15 ìèíóò,
ïîñëå ÷åãî ãîòîâ
ê èñïûòàíèÿì.
Äëÿ òîãî, ÷òî
áû çàäàòü ñèãíàë
ãåíåðàòîðà, çàïóñêàåòñÿ
ñïåöèàëüíàÿ ïðîãðàììà
"Generator".
Íà ëèöåâîé
ïàíåëè ïðîãðàììû
(Ðèñóíîê 4.18) âûáèðàåì
çàäàíèå ïàðàìåòðîâ
ïî êàíàëàì "ÃÐÓÏÏÎÉ"

Ðèñóíîê 4.18 - Ëèöåâàÿ
ïàíåëü ïðîãðàììû
ãåíåðàòîðà
Âî âêëàäêå
"ÃÐÓÏÏÎÉ" íàñòðàèâàåòñÿ
ôîðìà ñèãíàëà
(äëÿ ïðîâåðêè ðàáîòîñïîñîáíîñòè
"ÏÐßÌÎÓÃ. ÈÌÏ."
äëÿ âûïîëíåíèÿ
èñïûòàíèé - "ÑÈÍÓÑ"),
àìïëèòóäà íàïðÿæåíèÿ,
÷àñòîòà è ñìåùåíèå
ôàç (îêíî ÔÀÇÀ,
ÃÐÀÄ. îòîáðàæàåò
ñìåùåíèå ôàç
êàæäîãî îòäåëüíîãî
âûõîäà). Â îñòàëüíûå
íàñòðîéêè êîððåêòèðîâêè
íå âíîñÿòñÿ. Ïðèìåð
çàïîëíåíèÿ ïðåäñòàâëåí
íà ðèñóíêå 4.19.
Ðèñóíîê 4.19 - Ïðèìåð
çàïîëíåíèÿ îêíà
"ÃÐÓÏÏÎÉ" äëÿ
çàäàíèÿ ñèíóñîèäàëüíîãî
ñèãíàëà ñ íàïðÿæåíèåì
100 Â, ñìåùåíèåì
ôàç êàæäîãî ñëåäóþùåãî
êàíàëà 45° è ÷àñòîòîé
1 Ãö
Çàòåì íåîáõîäèìî
íàæàòü "ÂÎÇÂÐÀÒÈÒÜÑß
 ÎÑÍÎÂÍÓÞ ÏÐÎÃÐÀÌÌÓ".
Îòêðîåòñÿ ëèöåâàÿ
ïàíåëü ïðîãðàììû,
íà êîòîðîé íàäî
âûáðàòü "ÑÒÀÐÒ
ÃÅÍÅÐÀÖÈÈ".
Äëÿ ïðåêðàùåíèÿ
ïîäà÷è ñèãíàëà
è åãî èçìåíåíèÿ
íåîáõîäèìî íàæàòü
"ÑÒÎÏ ÃÅÍÅÐÀÖÈÈ"
è ïîâòîðèòü îïèñàííûé
âûøå àëãîðèòì.
Îïèñàíèå ïðîöåäóðû
èçìåðåíèÿ
 õîäå ýêñïåðèìåíòà
íà ìàêåò íàñîñà
ïîäàâàëîñü óïðàâëÿþùåå
ñèíóñîèäàëüíîå
íàïðÿæåíèå ñ
îïðåäåëåííûì
ñìåùåíèåì ôàç
îòíîñèòåëüíî
êàæäîãî ñëåäóþùåãî
ÏÝ. Ê ïðèìåðó, åñëè
óêàçàíî "ñäâèã
ôàç 20°", çíà÷èò,
ôàçû íà ÏÝ ðàñïðåäåëåíû
ñëåäóþùèì îáðàçîì:
ÏÝ: ¹1¹2¹3¹4¹5¹6¹7¹8
Ôàçà φ°: 0 20 40 60 80100120140
 ïðîöåññå
èññëåäîâàíèÿ
èçìåíÿëèñü ÷àñòîòû
â ïðåäåëàõ 1…50 Ãö,
ñ øàãîì 1 Ãö. Èçìåðÿëîñü
èçìåíåíèå âûñîòû
ñòîëáà æèäêîñòè
â âûõîäíîé òðóáêå.
Ïîêàçàíèÿ
ñíèìàëèñü ñëåäóþùèì
îáðàçîì: ìèíèìàëüíîå
çíà÷åíèå âûñîòû
ñíèìàëîñü ïî
óñòàíîâèâøåìóñÿ
óðîâíþ æèäêîñòè
(îæèäàíèå ~15 ìèíóò),
äàííîå çíà÷åíèå
ïðèíèìàëîñü ïîñòîÿííûì
íà ïðîòÿæåíèè
âñåãî èññëåäîâàíèÿ,
çàòåì âêëþ÷àëñÿ
íàñîñ, êîòîðûé
ðàáîòàë äî òåõ
ïîð, ïîêà âûñîòà
ñòîëáà æèäêîñòè
íå ïåðåñòàâàëà
ìåíÿòüñÿ. Ïîñëå
ñíÿòèÿ ýòîãî
çíà÷åíèÿ, íàñîñ
îòêëþ÷àëñÿ, èçìåíÿëèñü
íàñòðîéêè óïðàâëÿþùåãî
íàïðÿæåíèÿ, è
ñíîâà çàïóñêàëñÿ.
Èñïûòàíèå
ìàêåòà ñ ïîäëîæêîé
èç íåðæàâåþùåé
ñòàëè
Íà ìàêåòå
ñ ïîäëîæêîé èç
íåðæàâåéêè áûëè
ïðîâåäåíû èññëåäîâàíèÿ
äëÿ ôàç (20…75) ° ñ øàãîì
5°.
Íà ñäâèãå ôàç
80°
ïðîèçîøëà êðèòè÷åñêàÿ
ïîëîìêà ïüåçîýëåìåíòîâ
(ñì. ïðîòîêîëû
12 è 16). Âñå ïîëó÷åííûå
äàííûå ïðèâåäåíû
íà ðèñóíêå 4.21. Èç
ðàññìîòðåíèÿ
âûâåäåíû òå äàííûå,
êîòîðûå áûëè ïðîâåäåíû
íåâåðíî, ñ áîëüøîé
ñëó÷àéíîé ïîãðåøíîñòüþ
è òå, ãäå íàðóøàëèñü
óñëîâèÿ ýêñïåðèìåíòà.
Äëÿ íàãëÿäíîñòè
íà ðèñóíêå 4.20 ïðèâåäåíà
çàâèñèìîñòü
ìàêñèìàëüíîãî
âûõîäíîãî äàâëåíèÿ
îò ñìåùåíèÿ ôàç.
ßâíî çàìåòåí
ðîñò äàâëåíèÿ
íà âûõîäå ïðè
ïîâûøåíèè ñäâèãà
ôàç.

Ðèñóíîê 4.20 - Çàâèñèìîñòü
ìàêñèìàëüíîãî
äàâëåíèÿ ñòîëáà
æèäêîñòè, âûòàëêèâàåìîãî
íàñîñîì, îò ñäâèãà
ôàç

Ðèñóíîê 4.21 - Ñâîäíûé
ãðàôèê âûñîòû
ñòîëáà æèäêîñòè
îò ÷àñòîòû ïðè
ðàçëè÷íûõ ñìåùåíèÿõ
ôàç
Èç ïðèâåäåííûõ
ãðàôèêîâ âèäíî,
÷òî ìàêñèìóì
äàâëåíèÿ ïîâûøàåòñÿ
ïðè óâåëè÷åíèè
ñäâèãà ôàç è ñìåùàåòñÿ
â îáëàñòü áîëåå
âûñîêèõ ÷àñòîò.
Äëÿ âñåõ êðèâûõ
ÿâíî çàìåòåí
âûõîä íà ìàêñèìóì,
êîòîðûé ñìåíÿåòñÿ
ïàäåíèåì âûõîäíîãî
äàâëåíèÿ, êîòîðîå
ñòðåìèòñÿ ê íåêîòîðîìó
çíà÷åíèþ, èíäèâèäóàëüíîìó
äëÿ êàæäîãî ñìåùåíèÿ
ôàç, îáóñëîâëåííîå
îáúåìîì, âûòàëêèâàåìûì
èç íàñîñà ïðè
äåôîðìèðîâàíèè
ïëåíêè íàñîñîì,
êîòîðàÿ, â ñâîþ
î÷åðåäü, íå óñïåâàåò
âåðíóòüñÿ â èñõîäíîå
ñîñòîÿíèå ïðè
ïîâûøåíèè ÷àñòîòû.
Âèäíî, ÷òî ÷åì
áîëüøå ôàçà, òåì
áîëåå ïîëîãèé
ðîñò äàâëåíèÿ,
â òî âðåìÿ êàê
äëÿ ìàëûõ ôàç
ðîñò äàâëåíèÿ
áûñòð è ñìåíÿåòñÿ
àíàëîãè÷íî áîëåå
ðåçêèì ïàäåíèåì,
÷åì íà áîëüøèõ
ôàçàõ ñìåùåíèÿ.
Òåì íå ìåíåå,
íà ôàçàõ 30 è 35° çàìåòíî
äâà ìàêñèìóìà
(ðèñóíîê 4.22).
Ðèñóíîê 4.22 - Çàâèñèìîñòü
âûñîòû ñòîëáà
âûòàëêèâàåìîé
æèäêîñòè îò ÷àñòîòû
äëÿ ñìåùåíèÿ
ôàç 30° è 35° îòíîñèòåëüíî
êàæäîãî ñëåäóþùåãî
ÏÝ
Âåðîÿòíî, íàëè÷èå
äâóõ ìàêñèìóìîâ
ñâÿçàíî ñ òåì,
÷òî îäèí ìåõàíèçì
âûòàëêèâàíèÿ
æèäêîñòè, ïðîÿâëÿþùèéñÿ
íà ìàëûõ ñäâèãàõ
ôàç è ïðèñóùèé
ìàëûì ÷àñòîòàì,
ñìåíÿåòñÿ äðóãèì,
ñâîéñòâåííûé
äàííîé ñèñòåìå
ïðè ðàáîòå íà
âûñîêèõ ñäâèãàõ
ôàç è èìåþùèé
ìåñòî íà áîëåå
âûñîêèõ ÷àñòîòàõ.
Íà ðèñóíêå
4.23 ìîæíî ïðîñëåäèòü,
÷òî íà ìàëûõ ñäâèãàõ
ôàç (20°-25°) ïðèñóòñòâóåò
ëèøü îäèí ìàêñèìóì,
ñîîòâåòñòâóþùèé
÷àñòîòàì îêîëî
5 Ãö. Ïðè ôàçå 30° çàìåòíî
îáðàçîâàíèå
âòîðîãî ìàêñèìóìà,
êîòîðûé íà ïîñëåäóþùèõ
ôàçàõ ðàñòåò,
â òî âðåìÿ êàê
ïåðâûé ìàêñèìóì
çàìåäëÿåò ñâîé
ðîñò, ïðåâðàùàåòñÿ
â ïîëî÷êó ïåðåä
âòîðûì ìàêñèìóìîì
(40°),
à çàòåì èñ÷åçàåò
(50°).

Ðèñóíîê 4.23 - Ñâîäíûé
ãðàôèê âûñîòû
ñòîëáà æèäêîñòè
îò ÷àñòîòû ïðè
ðàçëè÷íûõ ñìåùåíèÿõ
ôàç
Âûâîäû
Ïðîâåäåííûå
ðàáîòû äàëè, íåñîìíåííî,
âàæíûå äàííûå
äëÿ ïîíèìàíèÿ
ìåõàíèçìà ðàáîòû
íàñîñà, ïîçâîëèëà
âûÿâèòü íåäîñòàòêîâ
ìàêåòà è, ñîîòâåòñòâåííî,
îïðåäåëèòü ðÿä
òðåáóåìûõ äîðàáîòîê.
Òàêæå äàííûå
èññëåäîâàíèÿ
äàþò ïðåäñòàâëåíèå
î ïàðàìåòðàõ
íàñîñà.
4.2.2
Измерение АЧХ пьезоэлементов
Îïèñàíèå
ñòåíäà è ìåòîäèêà
èçìåðåíèé
Äëÿ èçìåðåíèé
À×Õ èñïîëüçóåòñÿ
îïèñàííûé âûøå
ñòåíä äëÿ ñíÿòèÿ
ÂÀÕ. Îòëè÷èå çàêëþ÷àåòñÿ
â ïðèìåíåíèè
ãåíåðàòîðà.
 äàííîì èññëåäîâàíèè
ïîñëåäîâàòåëü
äåéñòâèé áûëà
ñëåäóþùàÿ:
. Ñáîðêà öåïè
2. Âêëþ÷åíèå
îáîðóäîâàíèå
è ïðîãðåâ â òå÷åíèå
15 ìèíóò.
. Ïîäà÷à ñèíóñîèäàëüíîãî
ñèãíàëà ÷àñòîòîé
10 Ãö è íàïðÿæåíèåì
5 Â (êîíòðîëü íàïðÿæåíèÿ
ïî âîëüòìåòðó)
. Ôèêñàöèÿ
ïîêàçàíèé àìïåðìåòðà.
. Ïîâòîð ïóíêòîâ
3-4 ñ èçìåíåíèåì
÷àñòîòû 50 … 1000 Ãö
ñ øàãîì 50 Ãö.
. Ïîâòîð ïóíêòîâ
3-5 ñ èçìåíåíèåì
íàïðÿæåíèÿ 10 … 100 Â
ñ øàãîì 10 Â.
Ðåçóëüòàòû
èçìåðåíèé
Áûë èçìåðåí
îòäåëüíûé ïðÿìîóãîëüíûé
ÏÝ ñ ìàðêèðîâêîé
"3". Íèæå ïðèâåäåíà
òàáëèöà 4.3, îòðàæàþùàÿ
çíà÷åíèÿ òîêà
îò ÷àñòîòû è
íàïðÿæåíèÿ ñèãíàëà,
ïîäàâàåìîãî
íà ÏÝ, è ðèñóíîê
4.24, èçîáðàæàþùèé
çàâèñèìîñòè
òîêà îò ÷àñòîòû
ïðè ðàçëè÷íûõ
íàïðÿæåíèÿõ.

Ðèñóíîê 4.24 - Çàâèñèìîñòè
òîêà îò ÷àñòîòû
ïðè ðàçëè÷íûõ
íàïðÿæåíèÿõ
Òàáëèöà 4.3 - Çíà÷åíèÿ
òîêà â ìÀ, ïðè ðàçëè÷íûõ
÷àñòîòàõ è íàïðÿæåíèÿõ
|
I, ìÀ
|
V, Â
|
|
f, Ãö
|
10
|
20
|
30
|
40
|
50
|
60
|
70
|
80
|
90
|
100
|
|
50
|
1,09
|
1,34
|
1,37
|
1,45
|
1,53
|
1,59
|
2,16
|
3,45
|
6,24
|
7,79
|
|
100
|
1,12
|
1,45
|
1,65
|
1,93
|
2,28
|
2,70
|
3,78
|
8,45
|
13,58
|
16,03
|
|
150
|
1, 19
|
1,64
|
2,02
|
2,51
|
3,11
|
4,37
|
6,15
|
16,58
|
21,18
|
23,26
|
|
200
|
1,27
|
1,87
|
2,44
|
3,15
|
4,01
|
6,10
|
8,96
|
23,63
|
27,27
|
29, 20
|
|
250
|
1,35
|
2,12
|
2,88
|
3,78
|
4,92
|
7,42
|
17,63
|
29,72
|
32,48
|
34,29
|
|
300
|
1,45
|
2,39
|
3,34
|
4,45
|
5,79
|
8,77
|
25,66
|
34,47
|
36,85
|
38,37
|
|
350
|
1,57
|
2,66
|
3,81
|
5,16
|
6,79
|
10,22
|
33,32
|
38,32
|
40,45
|
42,11
|
|
400
|
1,68
|
2,95
|
4,28
|
5,83
|
7,82
|
11,17
|
37,53
|
40,98
|
43,13
|
44,88
|
|
450
|
1,79
|
3,24
|
4,75
|
6,56
|
8,75
|
12,56
|
40,26
|
43,91
|
46,08
|
47,01
|
|
500
|
1,91
|
3,54
|
5,25
|
7,27
|
9,95
|
13,59
|
43,28
|
46,10
|
48, 20
|
49,36
|
|
550
|
2,16
|
3,84
|
5,71
|
8,03
|
11,06
|
15,48
|
45,78
|
48,39
|
50,01
|
50,93
|
|
600
|
2,29
|
4,14
|
6,22
|
8,72
|
12,16
|
17,63
|
47,84
|
49,78
|
51,16
|
51,73
|
|
650
|
2,42
|
4,45
|
6,72
|
9,47
|
13,30
|
20,73
|
49,37
|
50,57
|
51,58
|
52,00
|
|
700
|
2,55
|
4,76
|
7,22
|
10,27
|
14,52
|
23,81
|
50,50
|
51,16
|
52,05
|
52,45
|
|
750
|
2,69
|
5,06
|
7,73
|
11,01
|
15,66
|
28,86
|
51,14
|
51,25
|
52,36
|
52,18
|
|
800
|
2,82
|
5,38
|
8,25
|
11,71
|
16,78
|
35,48
|
51,15
|
51,79
|
52,34
|
52,75
|
|
850
|
2,96
|
5,68
|
8,79
|
12,56
|
17,94
|
47,05
|
51,14
|
52,03
|
52,80
|
52,99
|
|
900
|
3,10
|
5,99
|
9,31
|
13,42
|
19,35
|
49,23
|
51,12
|
51,73
|
52,61
|
53,02
|
|
950
|
3,23
|
6,34
|
9,82
|
14,26
|
20,98
|
49,51
|
52,21
|
52,03
|
52,35
|
53,09
|
|
1000
|
3,38
|
6,62
|
10,35
|
15,10
|
23,12
|
50,21
|
52,27
|
52,11
|
52,96
|
52,81
|
Ðåçóëüòàòû
èçìåðåíèé òîêà
÷åðåç ÏÝ, ðàçìåùåííîãî
íà ìàêåòå íàñîñà
Äàííûå èçìåðåíèÿ
ïðîâîäèëèñü â
äâà ïîäõîäà: áåç
âîäû â êàìåðå íàñîñà
è ñ âîäîé. Ìåòîäèêà
îñòàâàëàñü ïðåæíåé.
Ãðàôèêè òîêà
îò ÷àñòîòû ïðèâåäåíû
íà ðèñóíêàõ
4.25 - 4.28.

Ðèñóíîê 4.25 - Ðåçóëüòàòû
èçìåðåíèé À×Õ
íà ÏÝ ¹81 áåç æèäêîñòè

Ðèñóíîê 4.26 - Ðåçóëüòàòû
èçìåðåíèé À×Õ
íà ÏÝ ¹81 ñ æèäêîñòüþ

Ðèñóíîê 4.27 - Ðåçóëüòàòû
èçìåðåíèé À×Õ
íà ÏÝ ¹82 áåç æèäêîñòè

Ðèñóíîê 4.28 - Ðåçóëüòàòû
èçìåðåíèé À×Õ
íà ÏÝ ¹82 ñ æèäêîñòüþ
 õîäå èñïûòàíèÿ
ïîëó÷åíû çíà÷åíèÿ
òîêà îò íàïðÿæåíèÿ
ïðè ðàçëè÷íûõ
÷àñòîòàõ äëÿ
ÏÝ èç ìàêåòà íàñîñà.
Ïî ãðàôèêàì çàìåòíî,
÷òî òîê, ïðîòåêàþùèé
÷åðåç ÏÝ, ðàñòåò
ïî÷òè ëèíåéíî
íà âñåì èññëåäóåìîì
äèàïàçîíå ÷àñòîò
è íàïðÿæåíèé.
Îäíàêî çàìåòíû
îòêëîíåíèÿ â
ðàéîíå 200-400 è 650-900 Ãö.
Âñïëåñêè è ïðîâàëû
íà ãðàôèêàõ À×Õ
îïðåäåëÿþòñÿ,
âèäèìî, ðåçîíàíñíûìè
ÿâëåíèÿìè ïðè
êîëåáàíèÿõ ïîäëîæåê
ñ ÏÝ - ñòåíîê êàìåð
íàñîñà.
Ñðåäíÿÿ ðàçíèöà
ìåæäó çàâèñèìîñòüþ
òîêà ÷åðåç ÏÝ
íà ìàêåòå ñ âîäîé
è áåç âîäû ñîñòàâèëà
- 2,64 % (â ñðåäíåì òîê
íà ìàêåòå ñ âîäîé
áîëüøå). Èç ýòîãî
ñäåëàí âûâîä î
íåçíà÷èòåëüíîì
ïîâûøåíèè ïîòðåáëåíèÿ
òîêà îòíîñèòåëüíî
õîëîñòîãî õîäà.
5. Заключение
Íà îñíîâàíèè
ëèòåðàòóðíûõ
è ïàòåíòíûõ èññëåäîâàíèé
ðàçðàáîòàíî
ñõåìíîå ðåøåíèå
ïüåçîýëåêòðè÷åñêîãî
ìèêðîíàñîñà,
ñ èñïîëüçîâàíèåì
ïåðèñòàëüòè÷åñêîãî
ïðèíöèïà ïåðåìåùåíèÿ
æèäêîñòåé.
 îñíîâå äåéñòâèÿ
íàñîñà ïîëîæåíî
âîçáóæäåíèå
áåãóùåé âîëíû
èçãèáíûõ äåôîðìàöèé
ñòåíîê ðàáî÷åé
êàìåðû.
 êà÷åñòâå
áàçîâîé ïðèíÿòà
è ïîñòðîåíà ðàñ÷åòíàÿ
äâóìåðíàÿ ìîäåëü
ïüåçîíàñîñà
íà áàçå óðàâíåíèé
ïüåçîýôôåêòà
â ìàòðè÷íîé ôîðìå.
Óñòàíîâëåíî,
÷òî äåôîðìàöèè
ñòåíîê êàìåðû
îïðåäåëÿþòñÿ
êðèâèçíîé ó÷àñòêà
ñ ïüåçîýëåìåíòàìè.
Òåîðåòè÷åñêîå
ìîäåëèðîâàíèå
ïîçâîëèëî îïòèìèçèðîâàòü
ïàðàìåòðû ýëåìåíòîâ
ïüåçîíàñîñà,
â ÷àñòíîñòè,
òîëùèíû ñëîåâ
åãî äâóõñëîéíîé
ìîäåëè. Â ðåçóëüòàòå
áûëè ñîñòàâëåíû
òàáëèöû ñîîòâåòñòâèÿ
òîëùèí ñëîåâ
êðèâèçíå ñèñòåìû
äëÿ ëàòóííûõ
è íèêåëåâûõ ïîäëîæåê.
Äëÿ ïðîâåäåíèÿ
ýêñïåðèìåíòîâ
áûëè èçãîòîâëåíû
ìàêåòû, ðàçëè÷àþùèåñÿ
ìàòåðèàëîì ïîäëîæêè
(ëàòóíü, íèêåëü,
íåðæàâåþùàÿ ñòàëü).
 êà÷åñòâå ïüåçîýëåìåíòîâ
èñïîëüçîâàíû
ïëàñòèíû èç ïüåçîêåðàìèêè
ìàðêè ÖÒÑ-19.
Ïðîâåäåííûå
èñïûòàíèÿ ìàêåòîâ
ïüåçîíàñîñà
ñ 8 ïüåçîýëåìåíòàìè
ïîêàçàëè ðåçóëüòàòû
ïî àìïëèòóäå
äåôîðìàöèé êàìåðû
îêîëî 90 ìêì è âûõîäíîå
äàâëåíèå îêîëî
0,6 êÏà. Óñòàíîâëåíà
ñóùåñòâåííàÿ
çàâèñèìîñòü
âûõîäíûõ ïàðàìåòðîâ
îò ñîîòíîøåíèÿ
ôàç íà ïüåçîýëåìåíòàõ.
Îïòèìàëüíîå
ñîîòíîøåíèå
ôàç ìåæäó ñîñåäíèìè
ÏÝ ñîñòàâèëî
75°
ïðè ÷àñòîòå 37 -
38 Ãö.
Ýëåêòðè÷åñêèå
èñïûòàíèÿ ïîêàçàëè
íåçíà÷èòåëüíîå
(ïîðÿäêà 3%) óâåëè÷åíèå
ïîòðåáëÿåìîãî
òîêà â ñëó÷àå
çàïîëíåíèÿ êàìåðû
âîäîé ïî ñðàâíåíèþ
ñ ïóñòîé êàìåðîé.
 èòîãå, ïîñòàâëåííûå
çàäà÷è ðåøåíû,
öåëü äàííîé ðàáîòû
äîñòèãíóòà: ðàçðàáîòàíû
è èññëåäîâàíû
ôèçè÷åñêèå ìîäåëè
ìèêðîíàñîñîâ
ïåðèñòàëüòè÷åñêîãî
òèïà ñ ïüåçîýëåêòðè÷åñêèì
ïðèâîäîì, ñôîðìóëèðîâàíû
ðåêîìåíäàöèè
ïî èõ óñîâåðøåíñòâîâàíèþ.
Список
использованной литературы
1. D.J.
Laser and J.G. Santiago. A review of micropumps / Journal of Micromechanics and
Microengineering, 14.2004.Ñ. R35-R64.
2. Smits
J.G. 1990 Piezoelectric micropump with 3 valves working peristaltically Sensors
Actuators A 21 203-6 [Ñìèòñ ß.Ã.
1990 Ïüåçîýëåêòðè÷åñêèé
íàñîñ ñ òðåìÿ
ìåìáðàíàìè ïåðèñòàëüòè÷åñêè
àêòèâèðóåìûå,
Sensors Actuators A 21 203-6]
. Kim
H.H. et al. - 2009. Design and modeling of piezoelectric pump for microfluid
devices // Ferroelectrics. - Ò.378. - ¹.1. - Ñ.92-100. [Êèì
Õ. è äð. - 2009. Ðàçðàáîòêà
è ìîäåëèðîâàíèå
ïüåçîýëåêòðè÷åñêîãî
íàñîñà äëÿ ìèêðîæèäêîñòíûõ
óñòðîéñòâ. Æóðíàë:
Ferroelectrics (Taylor & Francis Group)].
. Kim
et al. H. - H. - 2010 Design of a Valveless Type Piezoelectric Pump for
Micro-Fluid Devices - TRANSACTIONS ON ELECTRICAL AND ELECTRONIC MATERIALS
Vol.11, No.2, pp.65-68, April 25, 2010 [Êèì Õ. è
äð. - 2010. Ðàçðàáîòêà
áåñêëàïàííîãî
ïüåçîýëåêòðè÷åñêîãî
íàñîñà äëÿ ìèêðîæèäêîñòíûõ
óñòðîéñòâ. Æóðíàë:
TRANSACTIONS ON ELECTRICAL AND ELECTRONIC MATERIALS, òîì
11].
. Ïîíîìàðåâ
Ñ.Ä., Àíäðååâà Ë.Å.
Ðàñ÷åò óïðóãèõ
ýëåìåíòîâ ìàøèí
è ïðèáîðîâ. - Ì.: Ìàøèíîñòðîåíèå,
1980. - 326 ñ.
. Ïîïëàâêî
Þ.Ì., ßêèìåíêî Þ.È.
"Ôèçè÷åñêèå
ìåõàíèçìû ïüåçîýëåêòðè÷åñòâà"
- Êèåâ: Àâåðñ, 1997, -
153 ñ. ISBN 966-95297-0-0
. Ïüåçîýëåêòðè÷åñêàÿ
êåðàìèêà: ïðèíöèïû
è ïðèìåíåíèå
/ Ïåð. ñ àíãë. Ñ.Í.
Æóêîâà. - Ìí. ÎÎÎ
"ÔÓÀèíôîðì",
2003. - 112 ñ. ISBN 985-6564-76-X (ðóñ.)
. Âèíîãðàäîâ
À.Í., Äóõîâåíñêèé
Ã.Å. Èññëåäîâàíèå
ïüåçîýëåêòðè÷åñêèõ
ìèêðîíàñîñîâ
äëÿ ìåäèöèíñêîé
è êîñìè÷åñêîé
òåõíèêè // Òðóäû
XII Ìåæâóçîâñêîé
íàó÷íîé øêîëû
ìîëîäûõ ñïåöèàëèñòîâ
"Êîíöåíòðèðîâàííûå
ïîòîêè ýíåðãèè
â êîñìè÷åñêîé
òåõíèêå, ýëåêòðîíèêå,
ýêîëîãèè è ìåäèöèíå":
Ñá. íàó÷í. òð. - Ì:
ÍÈÈßÔ ÌÃÓ. 2011. - Ñ.82
- 87.
. Âèíîãðàäîâ
À. Í, Äóõîâåíñêèé
Ã.Å., Ìàòâååâ Å.Â.
Ìîäåëèðîâàíèå
è àíàëèç ïåðèñòàëüòè÷åñêèõ
ïüåçîíàñîñîâ
// "Âàêóóìíàÿ íàóêà
è òåõíèêà" Ìàòåðèàëû
XX ÍÒÊ. Ïîä ðåäàêöèåé
ä. ò. í., ïðîôåññîðà
Ä.Â. Áûêîâà.Ì. ~: ÌÈÝÌ
ÍÈÓ ÂØÝ, 2013. - Ñ.54-60.
10. ÌÁÂÄ
- Ïðîãðàììà ïî
ìîäåëèðîâàíèþ
áåãóùåé âîëíû
äåôîðìàöèé // Âèíîãðàäîâ
À.Í. <http://www.hse.ru/org/persons/47633625>, Äóõîâåíñêèé
Ã.Å. - Ñâèäåòåëüñòâî
ÐÔ î ãîñ. ðåãèñòðàöèè
¹ 2012610487. Ïðàâîîáëàäàòåëü
ÃÍÓ ÍÈÈ ÏÌÒ, 2011.
- 58 ñ.
. Ï.À. Òèòîâ
"Ìîäåëèðîâàíèå
äåôîðìèðîâàííîãî
ñîñòîÿíèÿ è îïòèìèçàöèÿ
êàìåð ìèêðîíàñîñîâ
ñ ïüåçîýëåêòðè÷åñêèì
ïðèâîäîì" Ñáîðíèê
íàó÷íî-èññëåäîâàòåëüñêèõ
ðàáîò ñòóäåíòîâ
- ïîáåäèòåëåé
Êîíêóðñà ÍÈÐÑ
2013-2014 ãã. / Íàö. èññëåä.
óí-ò "Âûñøàÿ øêîëà
ýêîíîìèêè". - Ì.:
Èçä. äîì Âûñøåé
øêîëû ýêîíîìèêè,
2015. - Ñ.774-787.
Ðàçìåùåíî
íà Allbest.ru