Методы обратного проектирования и определение способов создания трёхмерных моделей на основе данных трёхмерного сканирования разных видов
Содержание
Введение
Глава 1. Обратное проектирование. Теория
.1 Обратное проектирование
.2 Системы автоматизированного проектирования
(САПР)
.3 Лазерные сканеры. Принцип работы
.3.1 Внешнее ориентирование трехмерной модели по
опорным точкам
1.4 Фотограмметрические 3d-сканеры
.5 Контактные 3d-сканеры
.6 Виды представления трёхмерных данных в
процессе обратного проектирования
.6.1 Облако точек
1.6.2 Полигональная сетка
.6.3 Твердотельные модели
.6.4 Nurbs-поверхности
Глава 2. Этапы обратного проектирования модели
реально существующего объекта
2.1 Сканирование объекта
.2 Обработка полигональной модели в Geomagic Wrap
.3 Вписывание параметрических поверхностей в
полигональную сетку для построения твердотельной модели методом граничного
представления (B-Rep)
Глава 3. Другие результаты обратного проектирования
.1 Построение модели по фотографиям
3.2 Обработка полигональной сетки и построение
параметрических поверхностей в Geomagic Wrap
Заключение
Список использованной литературы
Приложение 1. Технические характеристики
3D-сканера Artec Spider (EVA-5)
Введение
За последние два столетия научно-технический прогресс совершил настолько
большой скачок в качественном и количественном отношении, что это не могло не
отразиться на развитии, способах и методах изучения и познания большинства
научных дисциплин. Это также касается инженерной (прикладной) геодезии и
наземной (прикладной) фотограмметрии, обеспечивающих различные сферы
человеческой деятельности методами, техникой и организацией геодезических и
фотограмметрических работ для решения инженерных и других задач. Одной из таких
задач является обратное проектирование, которое представляет собой совокупность
методов, способов и технических решений определения формы, размеров,
конструкции, функционирования и иных характеристик объектов реального мира.
С развитием технологии, экономики и конкуренции в мире обратное
проектирование становится передовым методом изучения объектов их структуры,
конструкции и функционирования. Этот метод, используя современнейшие способы
получения пространственной информации об объекте, позволяет вернуть утерянную
или вовсе не существующую, всеобъемлющую информацию о предмете исследования.
Использование этого метода для копирования продуктов в целях преуспевания в
конкуренции, конечно, не приветствуется законом. Но основным положительным
моментом использования обратного проектирования является не дублирование
объекта, а его изучение с целью доработки и выпуска нового, более совершенного
продукта. Совершенствование чего-либо на основе опыта прошлых лет всегда было,
есть и будет основой научно-технического и любого другого прогресса. Поэтому
совершенствование этого направления напрямую влечёт за собой развитие других
наук и дисциплин.
Суть данной работы заключается в изучении методов обратного проектирования,
определении способов создания трёхмерных моделей на основе данных трёхмерного
сканирования разных видов.
Для реализации поставленной цели необходимо было решить следующие задачи:
Изучить понятие обратного проектирования.
Рассмотреть виды трёхмерного сканирования, их достоинства, недостатки,
решаемые задачи и т.д.
Проанализировать способы построения моделей по данным трёхмерного
сканирования.
Научится пользоваться теми функциями программного обеспечения, с помощью
которых будет строиться трёхмерная модель.
Построить модели объектов по данным полученным различными методами
трёхмерного сканирования.
Глава 1. Обратное проектирование. Теория
.1 Обратное проектирование
Обратное проектирование (Reverse engineering) - это процесс
проектирования цифровой модели, которая описывает объект и его технологические
свойства путем выполнения комплексного анализа его структуры. Этот процесс
направлен на создание виртуальной 3D-модели на основе существующего физического
объекта для его изучения, дублирования или улучшения.[2] обратный проектирование
сканер фотография
Существует множество причин для использования обратного проектирования.
Например, использование этого процесса оправданно, когда исходный проект не
имеет адекватной проектной документации в виде конструкторских чертежей или
трехмерных данных. В некоторых случаях оригинальный производитель больше не
производит продукт или не существует, а для сохранности и функционирования
продукта необходимо разработать требования к его использованию, для чего
потребуется всеобъемлющая проектная документация. В случае изношенных или
повреждённых компонентов, которые больше не поставляются или устарели, обратное
проектирование поможет проанализировать особенности их строения, для
последующего улучшения их характеристик и свойств, для обновления устаревших
материалов или возобновления производственного процесса.[2,17,34]
Обратное проектирование позволяет значительно сократить время на
разработку 3D-модели, и является единственной возможностью математически
описать какое-либо уникальное изделие, на которое отсутствует конструкторская
или любая другая документация.[17]
Для того, чтобы создать 3D-модель объекта, объект должен быть измерен с
использованием 3D технологий сканирования (контактные, лазерные, ручные 3d
сканеры и т.д.). После того, как операция сканирования выполнена, возможно,
построение 3D модели с использованием САПР (систем автоматизированного
проектирования).
.2 Системы автоматизированного проектирования (САПР)
САПР или система автоматизированного проектирования (англ. CAD -
Computer-aided engineering) - автоматизированная система, реализующая
информационную технологию выполнения функций проектирования, представляет собой
организационно-техническую систему, предназначенную для автоматизации процесса
проектирования, включающая комплекс технических, программных и других средств
автоматизации с заложенными в них инженерными решениями. Автоматизация не
означает самостоятельную работу системы без участия человека. В САПР часть
функций выполняет оператор, а автоматическими являются только отдельные
проектные операции и процедуры направленные на проведение расчётов и проверок
инженерных решений.[20] Компьютеризация процесса проектирования позволяет
оптимизировать процесс производства в целом, уменьшить материальные и трудовые
затраты. Замена устаревшей технологии на более прогрессивную предполагает
существенное снижение роли человеческого фактора в технологических процессах
различных производств.[7,8]
По специализации САПР можно классифицировать следующим образом:
.MCAD (англ. mechanical computer-aided design) - автоматизированное
проектирование механических устройств. Это машиностроительные САПР, применяются
в автомобилестроении, судостроении, авиакосмической промышленности,
производстве товаров народного потребления, включают в себя разработку деталей
и сборок (механизмов) с использованием параметрического проектирования на
основе конструктивных элементов, технологий поверхностного и объемного
моделирования (SolidWorks, Autodesk Inventor, КОМПАС, CATIA);
.EDA (англ. electronic design automation) или ECAD (англ. electronic
computer-aided design) - САПР электронных устройств, радиоэлектронных
средств,интегральных схем, печатных плат и т. п., (Altium Designer, OrCAD);
.AEC CAD (англ. architecture, engineering and construction computer-aided
design) или CAAD (англ. computer-aided architectural design) - САПР в области
архитектуры и строительства. Используются для проектирования зданий,
промышленных объектов, дорог, мостов и проч. (Autodesk Architectural Desktop,
AutoCAD Revit Architecture Suite, Bentley MicroStation, Bentley AECOsim
Building Designer, Piranesi, ArchiCAD, Geomagic Wrap).[6,7,9]
.3 Лазерные сканеры. Принцип работы
В настоящее время для решения строительных и архитектурных задач широко
используется тахеометрическая съемка, которая позволяет получить координаты
объектов, а затем представить их в графическом виде. Точность этого вида съёмки
достигает нескольких миллиметров, а скорость измерения составляет не более 2
итераций в секунду. Это эффективно, когда область съёмки не загружена объектами
и геометрия объектов простая.
Эти показатели зачастую недостаточны для проведения съёмки на таких
сложных объектах, как фасады зданий, заводов, сложных архитектурных и
промышленных объектов. Еще большим недостатком является слишком маленькое для
подробного отображения форм количество точек на 1м2.[11,12]
Решение этих проблем пришло с применением новых технологий исследования,
а именно лазерного сканирования.
Лазерное сканирование (лидар, от англ. LIDaR - laser indetification, detection
and ranging) - технология, позволяющая создать цифровую трехмерную модель
объекта, представив его набором точек с пространственными координатами.
Технология основана на использовании современных геодезических приборов -
лазерных сканеров, которые включают в себя теодолит, высокоскоростной лазерный
дальномер, систему зеркал и моторов, плюс разные модификации.[14,15] Скорость
измерений составляет от нескольких сотен до миллиона итераций в секунду, а
точность достигает от 5 до 1 мм. Координаты точек, полученные в результате
сканирования объекта, объединяются в большую группу точек (от сотен до
миллионов), называемую облаком точек или трёхмерной точечной моделью. Такой
набор точек с известными координатами можно использовать, чтобы создать очень
точную трёхмерную модель исследуемого объекта, а также плоские чертежи разных
частей объекта или его сечения.[14]
Лазерное сканирование можно применять для исследования различных по форме
и размерам объектов, например: архитектурных памятников, зданий, сооружений, промышленных
установок и других сложных объектов.
Устройство сканера объединяет в себе теодолит, лазерный дальномер,
сенсор, систему зеркал и моторов. Таким образом, для каждой точки объекта,
регистрируются горизонтальный j и вертикальный n углы с помощью теодолита, расстояние D измеряется с
помощью лазерного дальномера, а интенсивность отраженного сигнала дальномера
d с помощью сенсора (рис.1).
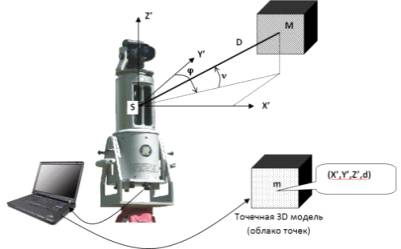
Рис.1 Схема получения облака точек объекта лазерным
сканированием.
Чтобы регистрировать параметры j, n, D и d каждой точки с определённым интервалом между ними
и в заданных пределах области видимости, задаётся максимальное и минимальное
значение - диапазон горизонтальных и вертикальных углов (jmin,nmin и jmax,nmax) и шаг изменения этих углов (Dj,Dn).
Используя эти параметры, сканер с помощью системы зеркал и моторов
последовательно устанавливает луч лазера на заданный угол и регистрирует
параметры j, n, D и d для каждой точки объекта в
заданных пределах. Так как точность смещения моторами луча лазера на шаг(Dj,Dn) ниже точности измерения углов(j, n), то
для каждой точки сканирования регистрируются значения j, n.
Координаты точек модели объекта вычисляются по формулам:
 (1)
(1)
Координаты точек модели объекта X’,Y’,Z’ получаются в
пространственной системе координат сканера (модели) SX’Y’Z’ (рис.1). Эта
система координат связана с системой отсчетов горизонтальных и вертикальных
углов в сканере.
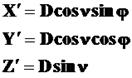
В зависимости от метода измерения расстояния D сканеры можно
разделить на три группы: импульсные, фазовые и триангуляционные.
Импульсные сканеры основаны на измерении времени t (рис.2a)
прохождения лазерного луча от сканера до объекта и обратно. В этом случае
расстояние вычисляется как:
 (2)
(2)
где v - скорость распространения электромагнитных волн.
Фазовые сканеры основаны на измерении разности фаз ∆φ
(рис.2b) посылаемых
и принимаемых модулированных сигналов и количества целых длин волн между
сканером и объектом. Расстояние можно вычислить по формуле:
 (3)
(3)
где К - целое количество длин волн, укладывающихся на данном
расстоянии.
λ - длина волны.
∆φ - разность фаз между прямой и
обратной волной.
Главное преимущество фазового метода измерения расстояний - более высокая
точность и скорость съемки.[11,12,14]
Триангуляционные сканеры имеют отличную от других конструкцию, здесь
излучатель и приёмник сигнала разнесены на известное расстояние (базис-B,рис.3).
Лазерный луч или полоса проецируются на объект излучателем, а сенсор (приёмник)
измеряет расстояние до поверхности объекта. Поэтому определение
пространственных координат точки объекта, сводится к решению треугольника.
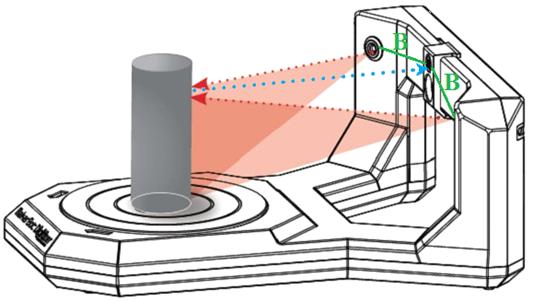
Рис.3. Триангуляционный метод.[21]
Такой метод сканирования отличается высочайшей точностью измерения
доходящей до сотых долей миллиметра, но на дистанции, не превышающей нескольких
метров. Триангуляционные сканеры применяются для точной съёмки в
машиностроении, реставрации, архитектуре, медицине и т.д. Триангуляционные
сканеры бывают портативными(ручными) и стационарными. В первом случае, чтобы
получить трёхмерную модель объекта необходимо определять положения сканера
относительно объекта в каждый момент времени. Для этого можно использовать
отражающие марки, по которым программное обеспечение определит положение
сканера. Либо используется лазерный трекер, представляющий собой систему с
самонаводящимся на сканер тахеометром, который во время съёмки определяет
положение сканера в каждый момент времени.[22,35]
.3.1 Внешнее ориентирование трехмерной модели по опорным
точкам.
Чтобы сориентировать модель в пространстве относительно системы координат
объекта, нужно выполнить внешнее ориентирование модели, так как во время съёмки
система координат сканера не ориентируется в какой либо другой пространственной
системе координат. Для этого используют опорные точки, координаты которых
определяются геодезическими методами, например тахеометрией. Опорные точки
представляют собой специальные маркированные точки (рис.4), центры которых
можно очень точно распознать автоматически, либо определить их, визуализируя
данные лазерного сканирования в каком-либо программном обеспечении.

Рис.4. Марки (опорные точки).
Преобразование координат осуществляется по формулам:
 (4)
(4)
где
X,Y,Z - координаты точки объекта в системе координат объекта OXYZ;
X’Y’Z’ - координаты точки объекта в системе координат сканера (модели) SX’Y’Z’,
вычисляемые по (1); X0,Y0,Z0 -
координаты начала системы координат сканера SX'Y'Z' относительно системы
координат объекта; A - матрица поворота, зависящая от трех углов наклона
w,a,k системы
координат сканера относительно системы координат объекта.[14,15,16,27]
Элементы
внешнего ориентирования модели X0,Y0,Z0,w,a,k можно
определить по опорным точкам. Их должно быть не менее 3, не лежащих на одной
прямой. Конечно, для более точного ориентирования лучше иметь большее
количество опорных точек, разнесенных по площади сканирования.
Пересчитав
координаты всех точек модели в геодезические координаты, получим точечную
модель ориентированную относительно реально существующего объекта.
Чаще
всего для съёмки всего объекта целиком недостаточно снимать его в одном
положении сканера. Обычно делают несколько съёмок с разных точек стояния, так
чтобы максимально охватить весь объект. В результате получают несколько
точечных моделей объекта, которые нужно объединить в одну. Это делается при
помощи опорных точек в зоне перекрытия съёмки. Иногда в качестве связующих
точек используют естественные контура объекта, попавшие в зону перекрытия
моделей. Облака точек двух моделей ориентируются друг относительно друга по
опорным точкам на основе уравнений 4. Впоследствии уже готовая облачная модель
целого объекта ориентируется относительно геодезической системы координат на
основе тех же уравнений.[14,15,16]
Кроме
положения точек объекта в пространстве, сканером так же фиксируется
интенсивность отражённого сигнала, которую на этапе постобработки модели можно
представить в псевдоцветах. Но чтобы получить естественные цвета в каждой точке
сканирования используют цифровую камеру, которой снимают объект с нескольких
ракурсов, либо камеру, установленную на сканер. В первом случае требуется так
же ориентирование фотоснимков в пространстве, а во втором перед лазерной
съёмкой на каждой точке стояния камерой фиксируется вся область сканирования,
поэтому координаты фотоснимка относительно облака точек известны, и дополнительная
их ориентация не требуется. Затем на этапе пост обработки каждой точке модели
можно присвоить соответствующее значение оптической плотности. Это существенно
повышает информативность полученной точечной модели.[14,15,16]
.4
Фотограмметрические 3d-сканеры
Фотограмметрические
сканеры разделяют по принципу работы на 2 типа: активные и пассивные.
Активные
фотограмметрические сканеры представляют собой аппарат с двумя разнесёнными на
определённое расстояние (базис) камерами, с ярким светодиодом, служащим вспышкой
для равномерного и правильного сканирования текстуры объекта, а так же с
источником структурированного света. Источником может быть LCD проектор,
который проецирует свет в виде сетки на объект. Две камеры одновременно
получают изображения деформированной сетки, спроецированной на объект. По
полученной стереопаре фотоснимков специальное программное обеспечение вычисляет
положение точек объекта относительно сканирующего устройства, используя
основные фотограмметрические зависимости, после чего выводит на экран
компьютера предварительную модель. Частота кадров для захвата и обработки
данных варьируется от десятков до сотен Гц, поэтому во время его работы можно
видеть в реальном времени прогресс сканирования, что позволяет полностью
отсканировать объект, не допуская появления дыр и участков без данных. Данный
метод сканирования является одним из самых быстрых и точных, так как вместо
сканирования одной точки в момент времени, такие сканеры получают данные со
всего поля зрения сразу.[22]
Пассивные
фотограмметрические 3d сканеры отличаются от активных отсутствием проектора,
поэтому они регистрирует лишь свет, отражённый от объекта в видимом диапазоне.
По сути своей они являются спаренными цифровыми камерами, но для построения
модели также можно воспользоваться и обычной цифровой фотокамерой. Для создания
трёхмерных моделей также используются фотограмметрические методы, которые
требуют более 60% перекрытия между снимками, для выполнения условий построения
модели.[10]
.5
Контактные 3d-сканеры
Контактные
3d-сканеры исследуют физические объекты, находясь с ними в контакте. Они могут
представлять собой:
систему
состоящую из щупа, закреплённого на каретках перемещающихся в нескольких осях.
Такую систему целесообразно использовать при сканировании плоских или выпуклых
поверхностей, не имеющих резких изгибов, недоступных для щупа.
систему
шарнирных сочленений в виде руки-манипулятора с множеством степеней свободы и
щупом на конце, снабжённую угловыми датчиками высокой точности. Эта система
более функциональна и может сканировать почти любые формы объектов.
сочетание
двух вышеописанных систем. Данная система позволяет сканировать объекты самых
разнообразных форм, даже с внутренними полостями.[22]
Принцип
работы этих сканеров заключается в том, что исследуемый объект ощупывается
наконечником щупа, снабжённым сенсором касания. При этом он перемещается в
пространстве, тогда как измерения по угловым датчикам или кареткам фиксируют
точные координаты наконечника в каждый момент касания объекта. Частота
измерений обычно не превышает 100 Гц.
Процесс
сканирования может задаваться программно, либо производится вручную оператором.
В случае автоматического сканирования, оператор задаёт программу движений
сканера с определённым шагом координатной сетки, на основе которой аппарат
будет производить сканирование с определённым интервалом.
От
шага сетки зависит точность измерений, чем он меньше, тем более точная модель
будет получена, но с уменьшением шага, увеличивается время сканирования,
которое для сложных объектов может исчисляться многими часами и сутками.
Ускорить процесс можно задав программно сложность поверхностей сканируемого
объекта и соответствующий шаг сетки, для простых поверхностей - шаг больше, для
более сложных - меньше.
Кроме
описанных недостатков скорости сканирования таких сканеров, нужно добавить
ограничение размеров исследуемого объекта, так как объект нужно поместить в
рабочий объем сканирующей системы, которая обычно не превышает 2 метров по
горизонтальным осям и 1,5 метра по вертикали. А также необходимость непосредственного
контакта с поверхностью объекта, что может привести к его повреждению, если он
хрупок.[30]
1.6
Виды представления трёхмерных данных в процессе обратного проектирования
.6.1
Облако точек
Облако
точек (точечная модель) - представляет собой набор точек, полученных в
результате 3D-сканирования объекта реального мира и представляющих поверхность
этого объекта в трехмерной системе координат (рис.5.). Кроме того точечную
модель можно получить из уже спроектированной цифровой модели, не имеющей
аналога в реальном мире. Точки облака обычно представлены координатами XYZ,
которые могут быть просто записаны в файле, но существуют форматы, которые
имеют несколько иное представление. Например, выходные данные с 3d-сканера
могут быть представлены в виде массива углов наклона прямой, проходящей через
начало системы координат сканера и точку объекта, и значений расстояний до
соответствующих точек объекта. Сканирование может выполняться с нескольких
точек обзора и порождать множество таких наборов данных. Также данные
сканирования могут содержать метаданные, зависящие от типа 3d-сканера. Под
метаданными понимаются специфические данные, являющиеся побочным продуктом
процесса измерения координат точек. К примеру, для активных бесконтактных
сканеров таковыми будут интенсивность отраженного сигнала, количество
отражений, время фиксации точки, цвет поверхности и т.д. Точность отображаемой
поверхности объекта напрямую зависит от количества точек в облаке, а
следовательно от разрешающей способности сканера.
Рис.5.
Облако точек поверхности объекта.
Облака
точек обеспечивают быструю визуализацию объекта реального мира. При этом они
успешно используются для измерений и контроля объектов, 3D-печати, наглядной
визуализации труднодоступных мест или больших протяженных объектов, создания
трехмерных и математических моделей, распознавания образов, при
автоматизированном анализе, реконструкциях и эксплуатации, а так же являются
основой для обратного проектирования реально существующих объектов. [25]
В
случае обратного инжиниринга первым этапом анализа данных такого типа обычно
является восстановление поверхности и ее триангуляция с целью получить базовую
аппроксимацию в виде полигональной сетки. Триангуляция может использоваться в
дальнейшем для аппроксимации такой поверхности функциями более высоких
порядков, например параметрическими или Nurbs поверхностями.[4]
1.6.2
Полигональная сетка.
Полигональная
сетка (модель) представляет собой набор топологически связанных простых
геометрических двумерных примитивов, которые описывают поверхность объекта.
Этими примитивами являются полигоны, которые представляют собой фигуры с
прямыми сторонами (3 и более сторон), определенными посредством точек
трехмерного пространства (вершин) и соединяющих эти точки линий (ребер)
(рис.6). Внутренняя область полигона называется гранью.[25,32,33]
Обычно
в полигональной сетке вершины и ребра совместно используются разными гранями,
так реализуется их топология. В этом случае их называют общими вершинами или общими
гранями. Внешние ребра сетки называются граничными ребрами.[25]
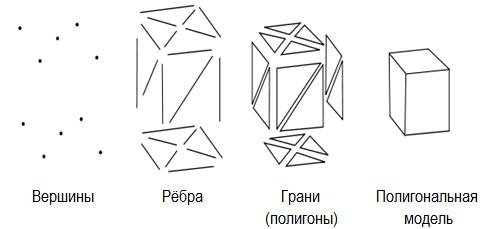
Рис.6.
Составляющие полигональной сетки.
Передняя
сторона грани полигона графически представляется с помощью перпендикулярного к
ней вектора, называемого нормалью грани (рис.7).
Рис.7.
Нормали граней.
Порядок
перечисления вершин, окружающих грань, определяют ее направление (в какую
сторону грань обращена лицом, а в какую - изнанкой). Этот факт может оказаться
важным, так как полигоны видны только со своей лицевой стороны.[25]
Полигональная
модель тем точнее и ближе к оригинальному объекту, чем меньше размер полигонов,
и чем больше их количество.
Поэтому
признаку полигональные модели разделяются на высокополигональные (high poly) и
низкополигональные (low poly), и так как объём данных в полигональных моделях
очень влияет на производительность технического оборудования, то эти два вида
полигональных моделей имеет различное применение. Низкополигональные модели
используются в основном там, где нужна высокая производительность и скорость
визуализации модели в программе, например в играх.[32,33]Но существует
возможность повысить детализацию модели с помощью замощения (тесселяции). Тесселяция - способ, с помощью которого возможно увеличить
количество полигонов в трёхмерной модели, используя кривые Безье. При этом
каждый полигон модели разбивается на заданное число связанных полигонов,
которые выстраиваются в соответствии с общим направлением поверхности модели.
Таким путём можно сначала создать простую модель, а затем быстро и просто
повысить её детализацию.[20]
Полигональное
моделирование, это моделирование только поверхности объекта, поэтому оно
относится к пустотелому моделированию. Это проявляется в том, что при редактировании
такой модели, если удалить часть полигонов, образуется дырка в поверхности,
через которую будет видно всю внутреннюю часть модели. То есть такая модель в
отличие от твердотельных моделей не имеет информации о своём объёме. Поэтому к
недостаткам полигональных моделей можно отнести то, что из таких моделей
невозможно получить сведения о физических свойствах объекта, таких как масса,
объём, центр тяжести и др.[5]
.6.3
Твердотельные модели
Твердотельное
моделирование является самым совершенным и самым достоверным методом создания
копии реального объекта.[35]
В
основу модели положен принцип формирования сложной модели из элементарных
объёмов (базисных тел - параллелепипеда, куба, сферы, цилиндра, конуса, клина,
тора) а также, как результат вращения, выдавливания областей с использованием
логических операций объединения, вычитания, пересечения. Одно из достоинств тел
(твердотельных объектов) заключается в том, что их можно анализировать: можно
вычислить такие свойства тел, как масса, центр тяжести, площадь поверхности.
Имеют внутренность и объём.
Твердотельная модель строится путем создания целостной, не
имеющей разрывов совокупности поверхностей, которые сшиты между собой и образуют правильный замкнутый
геометрический объем, то есть твердое тело содержит внутренний объем,
ограниченный внешней поверхностью. Изменение одной из
них приводит к изменению других. [24] Фундаментальным свойством твердотельного
моделирования является сохранение топологии элементов тела (отношения элементов
- их взаимного расположения). Сохранение связей элементов тела
обеспечивает замкнутость и непротиворечивость объема твердого тела. Установленные между элементами связи сохраняются вместе с
геометрической информацией в базе данных.
Методы твердотельного моделирования, основанные на булевых
операциях, особенно удобны при вычислении поверхностных и весовых характеристик
тел, расчете напряжений, имитации операций механической обработки. [35] В
последнем случае операции резания металла (точение, фрезерование, сверление и
т. п.) могут быть легко описаны при помощи булевой разности.
Методы создания твердотельных моделей подразделяются на два
класса:
1.Метод конструктивного представления (C-Rep)[35]:
Заключается в построении сложных твердотельных моделей, из базовых
простейших составляющих элементов, называемых твердотельными примитивами,
которые определяются формой, размером, точкой привязки и ориентацией. Каждый
примитив определен некоторой формой (параллелепипед, цилиндр переменного
сечения, шар, куб, сфера, конус, клин и т.п.), точкой привязки, исходной
ориентацией и изменяемыми размерами. Построение
базовых примитивов заключается в создании тел с помощью развертки(выдавливания,
вращения и перемещения вдоль кривой) двухмерных областей в трехмерном
пространстве. При этом образуется объем (замкнутое пространство, определяемое
параметрами эскиза и выдавливания вдоль кривой) - твердое тело. Редактирование
таких моделей сводится к изменению параметров эскиза и выдавливания, после чего
перестраивается модель тела.
Инструментами построения C-Rep являются булевы операции, они базируются
на алгебраической теории множеств. Булевы операции являются главным
инструментарием для построения модели С-Rep при определении взаимоотношений
между соседними примитивами.
Чаще всего используются операции:
¾ Операция объединения (È) определяет пространство внутри внешней границы
составной формы, полученной из двух тел с общей областью. Объединение двух
произвольных кругов А и В в таблице 1 представляет собой заштрихованную область
A∪В. Таким образом, операция объединения
определяет результирующую составную форму как один элемент. На том же рисунке
показано применение эквивалентной операции для двух твердотельных примитивов
(цилиндра Р и кубоида Q). Там же проведено сечение объединения P∪Q, чтобы подчеркнуть, что образовалась
новая цельная форма, не похожая ни на цилиндр, ни на кубоид.
¾ Операция разности (─) определяет пространство,
ограниченное поверхностью, оставшейся от одной формы, и внешней границей общей
области двух форм. В таблице 1 заштрихованной областью А─В показан
результат действия операции булевой разности на круги А и В. Ниже на этом же
рисунке изображен цилиндр с пазом Р─Q, являющийся разностью двух твердых
тел Р и Q. Например, модель плиты с отверстием в ней
может быть получена вычитанием цилиндра из параллелепипеда.
¾ Операция пересечения (Ç) определяет пространство внутри границ общей области
объектов. Пересечение кругов А и В представлено в таблице 1 заштрихованной
областью А∩В, а пересечение тел Р и Q - твердотельной формой P∩Q.
|
Булевы операции на примере твёрдых тел.
|
|
Теория множеств
|
Объединение È
|
Разность ¾
|
Пересечение Ç
|
|
A B
|
AÈB
|
A ¾ B
|
AÇB
|
|
   
|
|
|
|
Таблица. 1. Булевы операции на примере твёрдых тел.
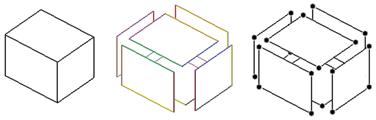
2.Метод граничного представления (поверхностный)
(B-Rep)[24,35]:
Метод граничного представления (B-Rep) также оперирует с
примитивами, связанными при помощи булевых операций. Граничное представление -
задание граничных элементов детали - параметрически описанных поверхностей
(граней - face), ребер (границы или же пересечения граней), вершин (часть/точка
на кривой, формирующей ребро), описывающих тело. Эти данные дополняются
информацией о топологии примитива и особенностях его геометрии.
В этом методе задаётся ось и контур будущего объекта, далее
происходит построение области, занятой контуром. Затем удаляют скрытые линии и
закрашивают поверхности с учетом их свойств. Именно ребра и грани образуют
трёхмерную граничную поверхность объёмного тела. Это единственный метод,
позволяющий создать точное, а не приближенное представление геометрического
твердого тела.
При таком подходе от пользователя требуется задание контуров
или границ объекта, а также эскизов поверхностей разных видов, и указание линий
связей между этими поверхностями, чтобы можно было установить взаимное
соответствие. B-Rep метод актуален в образовании сложных структур, которые
очень сложно воссоздать при помощи C-Rep метода. Так же преимуществом систем с
B-Rep является простейшее изменение граничного представления в данную каркасную
модель и обратным ее изменением. Причиной тому является то, что описание границ
аналогично описанию каркасной модели.
|
Основные составляющие граничной модели.
|
|
Общий вид.
|
Грани и рёбра.
|
Вершины.
|
|
|
Таблица 2. Основные составляющие граничной модели.
Достоинства и недостатки методов C-Rep и B-Rep[24,35]:
¾ Система с C-Rep представлением имеет преимущества при
первоначальном формировании модели, так как построить объемную модель
правильной формы из объемных примитивов с использованием булевых операций
достаточно просто. Кроме того, этот метод обеспечивает более компактное
описание модели в БД.
¾ Однако B-Rep представление является актуальным при создании
сложных форм, которые воссоздать с помощью C-Rep метода очень трудоемко.
¾ В C-Rep методе модель хранится в виде комбинации данных и
логических процедур, при этом требуется меньше памяти, но большим оказывается
объем вычислений при воспроизведении модели. С другой стороны модели c B-Rep
представлением хранит точное описание границ модели, для этого нужно больше
памяти, мощные аппаратные средства и ПО, но не требуется почти никаких
вычислений для воссоздания изображения.
¾ Относительным достоинством систем с B-Rep является
сравнительная простота преобразования граничного представления в
соответствующую каркасную модель и обратно. Причина такой простоты заключается
в том, что описание границ подобно описанию каркасной модели, а это облегчает
преобразование модели из одной формы в другую, и делает системы с B-Rep
представлением совместимыми с уже имеющимися системами.
1.6.4 Nurbs-поверхности
Неоднородный рациональный сплайн Безье, NURBS (Non-Uniform Rational
Bezier Spline) - частный случай кривых Безье. Это особая технология,
предназначенная для создания плавных органических форм и моделей, основанная на
сложном математическом аппарате.[20] Всего существует около 1500 уравнений для
описания всех геометрических элементов, от простейших кривых до сложных поверхностей.
Из-за особенности строения NURBS поверхности всегда гладкие (у них нет острых
краев, присущих полигонам), поэтому они широко используются в органическом
моделировании (подобном созданию растительных форм), для создания моделей
животных, людей, машин и т. д. NURBS поверхности не состоят из сетки
прямоугольников, разбиение поверхностей на многоугольники происходит лишь на
этапе визуализации в программном обеспечении и предполагает использование
оптимального алгоритма для сохранения гладкости. Поэтому при любом приближении
соблюдается гладкость поверхности.[28] Моделирование
на основе NURBS-кривых отличается большей гибкостью и позволяет создавать любые
самые причудливые модели. Вместе с тем NURBS-модели более массивны, сложны в
редактировании и дольше визуализируются.[29]
Любая NURBS-модель представляет собой некий набор
NURBS-поверхностей, образованных NURBS-кривыми. Данные кривые описываются
математическими формулами, в итоге отпадает необходимость запоминать каждую
точку кривой, достаточно знать координаты ее начала и конца и математическую
формулу, описывающую кривую. Это позволяет создавать сложные криволинейные
поверхности с небольшим числом управляющих вершин (рис. 8) и легко избавляться
от грубой огранки объектов, придавая им плавную искривленную форму путем
простого увеличения детализации.
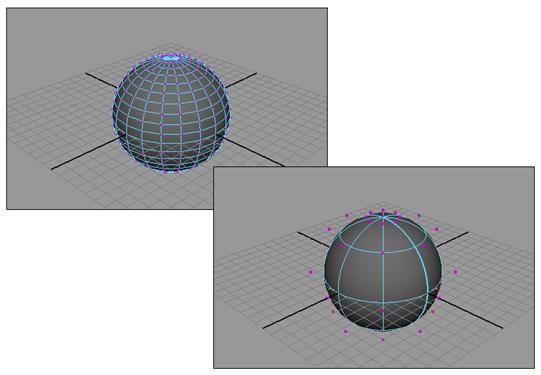
Рис. 8. Уровень детализации полигонального шара
(слева) и NURBS-шара (справа) - видно, что число вершин у первого шара на
порядок больше. Светлана Шляхтина.[29]
Самый простой вид NURBS-поверхностей - это NURBS-примитивы,
представленные объектами Sphere (Сфера), Cube (Куб), Cylinder (Цилиндр), Cone
(Конус), Plane (Плоскость) и Torus (Topус). Как и другие типы примитивов,
NURBS-примитивы обычно используются в качестве основы для формирования более
сложных моделей.[29]
Глава 2. Этапы обратного проектирования модели реально
существующего объекта
.1 Сканирование объекта
Сканирование проводилось активным фотограмметрическим 3D-сканером Artec
Spider (EVA-5), принцип работы таких сканеров описан в разделе 1.4. В качестве
исследуемого объекта были выбраны старые настольные тиски производства СССР,
так как они обладают множеством различных поверхностей в основном правильной
геометрической формы.
Сканирование фотограмметрическим сканером обычно производится в несколько
маршрутов. Программное обеспечение сканера Artec Studio 9 осуществляет
отображение процесса сканирования в реальном времени, что позволяет определить
то, что уже отсканировано и предстоящий объём работы(рис.9). Для правильного
сканирования необходимо перемещать сканер вокруг объекта в определённом
диапазоне расстояния от него, за этим можно наблюдать в окне программного
обеспечения сканера (рис.10). При выходе из диапазона будет подан звуковой
сигнал, в таком случае необходимо приблизить или отдалить сканер.
Так как объект имеет достаточно сложную геометрию, необходимо было
сделать несколько сканов: 2 больших скана с двух сторон объекта, и еще 3 для
внутренних и мелких областей.
В результате сканирования имеем предварительную визуализацию будущей
модели (рис.11). Необходимо произвести обработку сканов, которые представляют
собой набор снимков со сканера с предварительным внутренним ориентированием.
Для этого задаём программе последовательное выполнение следующих действий: глобальная
регистрация, точная склейка и фильтрование мелких объектов. Всё эти этапы
проводятся автоматически, конечно имеется возможность более тонкой ручной
настройки, но результат автоматической обработки нас вполне устраивает
(рис.12). В данном программном обеспечении также можно произвести сведение
сканов и объединение их в одну модель, но было решено сделать это в другом
программном обеспечении с большим функционалом в работе с полигональными
сетками, а именно в триальной версии Geomagic Wrap.

Рис.9. Процесс сканирования и его отображение в реальном
времени в окне программного обеспечения.
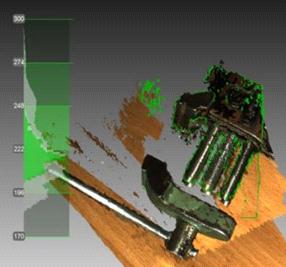
Рис.10. Отображение процесса сканирования в окне программного
обеспечения сканера.
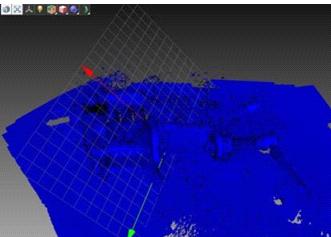
Рис.11. Предварительная визуализация сканов.
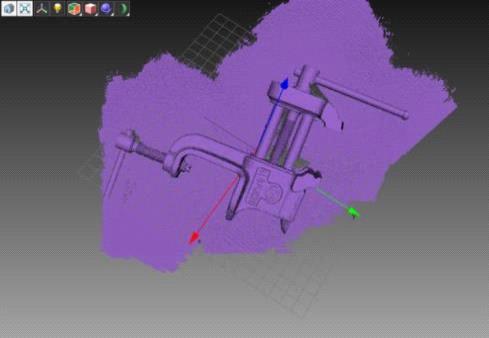
Рис.12. Конечный результат обработки сканов.
.2 Обработка полигональной модели в Geomagic Wrap
После удаления поверхности стола со всех сканов первым этапом построения
модели будет ориентирование (регистрация) всех сканов относительно друг друга,
для их последующей склейки. Для начала можно обойтись ручным ориентированием по
нескольким соответственным точкам (рис.13).
Дальше следует провести глобальную регистрацию, в ходе которой программа
точно сориентирует сканы относительно друг друга в автоматическом режиме. При
этом возможно выполнить настройку допусков, размера образца сравнения,
количество итераций сравнения и т.д. В результате чего получаем точно
ориентированные между собой полигональные сетки (рис.14).
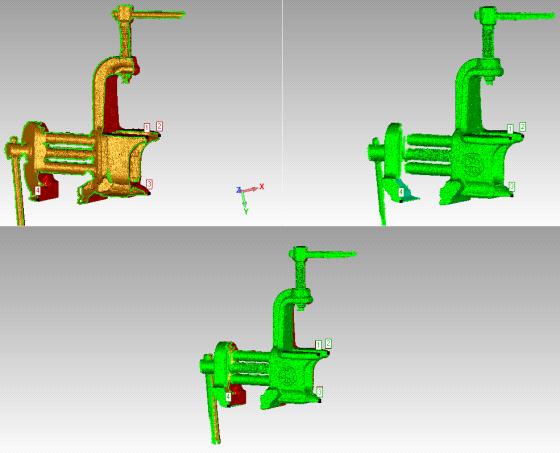
Рис.13. Ориентирование сканов по нескольким точкам.
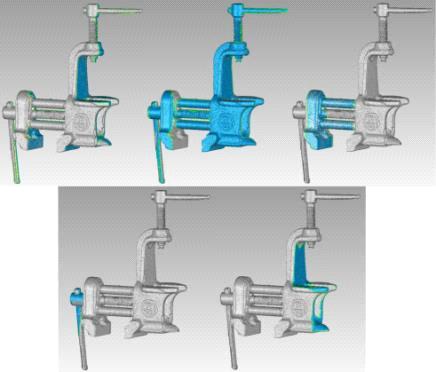
Рис.14. Сориентированные между собой части модели.
Следующим шагом будет объединение сканов в одну модель, процесс также
автоматизирован и нуждается лишь в небольшой настройке. В результате получаем
цельную полигональную модель (рис.15) количество полигонов около 10 300 000.
Как видно на изображении, модель имеет много шумов и неровностей, вызванных
отчасти блеском металла, сколов краски, а так же загрязнённостью узких щелей, а
также отверстия, вызванные недопустимыми для сканера углами обзора и
автоматической фильтрацией краевых частей объекта во избежание краевого
эффекта.
Чтобы иметь возможность вписать различные поверхности в элементы объекта
необходимо как можно лучше очистить модель от шумов, залить отверстия,
исправить ошибки полигональной сетки, а так же уменьшить количество полигонов
без изменения основной формы объекта для улучшения производительности работы
программы. Для этого в программном обеспечении есть множество
автоматизированных, полуавтоматизированных и ручных инструментов и функций.
Далее приведём основные инструменты редактирования полигональной сетки:
.”Устранение неполадок каркаса” - очень важный автоматизированный инструмент,
который обнаруживает и исправляет самопересечения, рёбра с большим количеством
складок, шипы, мелкие компоненты, туннели и отверстия;
.”Уменьшение количества треугольников” (полигонов) - сокращает до нужного
количества или процента количество полигонов в полигональной сетке без
ухудшения её детализации;
.”Пересечение” - накладывает ограниченную или неограниченную плоскость
или кривую на полигональную сетку, после чего создаёт искусственную линию
пересечения на полигональной сетки. Имеется возможность удаления полигонов по
одну из сторон плоскости;
.”Перестроение каркаса” - повторно трингулирует каркас полигональной
сетки для получения более равномерной триангуляции;
.”