Основы автоматизации технологических процессов нефтегазового производства
Оглавление
ПРЕДИСЛОВИЕ
ВВЕДЕНИЕ
Глава 1. ОБЩИЕ СВЕДЕНИЯ ОБ АВТОМАТИЧЕСКОМ УПРАВЛЕНИИ
ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ, КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ (САР)
1.1 Основные понятия и определения теории автоматического
регулирования
.1.1 Принципы регулирования
.1.2 Классификация систем автоматического регулирования
.1.3 Алгоритм (закон) регулирования5
.1.4 Основные требования к автоматическим системам управления
.2 Передаточные функции линейной системы. Структурные схемы и
их преобразования
.3 Статика систем автоматического регулирования
.3.1 Статические характеристики элементов и звеньев САР
.3.2 Статические характеристики соединения звеньев
.4 Понятие об устойчивости систем автоматического
регулирования
Глава 2. МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
2.1 Основные метрологические термины и определения. Понятие
измерения
.2 Виды средств измерения (СИ)
.3 Системы и единицы физических величин
.4 Метрологические характеристики средств измерений.
Градуировка и поверка средств измерений
Глава 3. ЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ МЕХАНИЧЕСКИХ ВЕЛИЧИН
3.1 Датчики линейного и углового перемещения
.2 Датчики усилия
.3 Датчики скорости вращения
Глава 4. МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ ОСНОВНЫХ ТЕХНОЛОГИЧЕСКИХ
ПАРАМЕТРОВ
4.1 Методы электрических измерений
.2 Методы и средства измерения температуры
.3 Методы и средства измерения уровня
.4 Методы и средства измерения давления
.4.1 Методы прямых измерений давления
.4.2 Методы косвенных измерений давления
.5 Методы и средства измерения расхода
.5.1 Расходомеры переменного перепада давления
.5.2 Расходомеры постоянного перепада давления
.5.3 Электромагнитные расходомеры
.5.4 Ультразвуковые расходомеры
.5.5 Расходомеры переменного уровня
.5.6 Тепловые расходомеры
.5.7 Вихревые расходомеры
.5.8 Кориолисовы расходомеры
Глава 5. МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ ВИБРАЦИИ
5.1 Методы измерения вибрации
.2 Средства измерения вибрации
Глава 6. ИЗМЕРЕНИЕ ФИЗИКО-ХИМИЧЕСКИХ СВОЙСТВ ЖИДКОСТЕЙ И
ГАЗОВ
6.1 Измерение физико-химических свойств нефти и пластовых вод
.1.1 Измерение физико-химических свойств нефти
.1.2 Измерение физико-химических свойств пластовой воды
.2 Измерение физико-химических свойств газов
Глава 7. РЕЛЕЙНЫЕ ЭЛЕМЕНТЫ
7.1 Электромагнитные реле постоянного и переменного тока
.1.1 Электромагнитные реле постоянного (нейтральные)
.1.2 Электромагнитные реле переменного тока
.2 Магнитоуправляемые контакты (герконы)
Глава 8. ПЕРЕДАЧА ИНФОРМАЦИИ В СИСТЕМАХ АВТОМАТИЗАЦИИ
8.1 Основные сведения о системах телемеханики
.2 Интерфейсы передачи данных
Глава 9. МИКРОПРОЦЕССОРЫ
9.1 Основные сведения о микропроцессорах
.2 Аналого-цифровое и цифро-аналоговое преобразование
информации
ЗАКЛЮЧЕНИЕ
ЛИТЕРАТУРА
ПРИЛОЖЕНИЯ
Приложение 1. Контрольно-измерительные материалы
Приложение 2. Перечень практических и лабораторных работ
Приложение 3. Перечень тем расчетно-графических работ
(рефератов)
Приложение 4. Список основной и дополнительной литературы
ПРЕДИСЛОВИЕ
Учебное пособие «Основы автоматизации технологических процессов
нефтегазового производства» содержит систематическое изложение одноименной учебной
дисциплины, полностью соответствует учебной программе, и, по сути, является
основной учебной книгой по дисциплине. В нем отражены базовые знания,
определенные дидактическими единицами Федерального государственного
образовательного стандарта по направлению 131000 «Нефтегазовое дело»,
специальности «Эксплуатация и обслуживание объектов добычи нефти». Содержание
учебного пособия включает характеристику методов получения и использования
знаний в области автоматизации технологических процессов, методологические
основания базовых методов и закономерностей функционирования измерительных
средств и систем автоматизации и развития отраженных в них сфер деятельности, а
также ключевые проблемы и важнейшие тенденции развития нефтегазовой отрасли.
Целью учебного пособия является оказание методической помощи обучаемым в
создании необходимой начальной теоретической базы знаний для обучаемых по
основным принципам построения систем автоматизации производственных процессов,
а также по техническим средствам автоматизации, на базе которых строятся
упомянутые системы. При изучении учебного материала студент получит сведения об
основах автоматизации измерительных процессов, видах и методах измерения,
устройстве и особенностях эксплуатации конкретных датчиков основных технологических
параметров, вторичных приборов и микропроцессорной техники.
Задача пособия заключается в предоставлении студентам возможности
изучения устройства и принципа действия конкретной аппаратуры и средств
автоматики, а также некоторых правил их эксплуатации.
В процессе изучения материала студенты должны ознакомиться с основами и
классификацией методов и средств измерений; получить четкое представление о
технологическом комплексе, о точках съема сигнала параметров технологического
процесса; усвоить принципиальные схемы аппаратуры, принципы работы датчиков и
реле, технические возможности микропроцессорной аппаратуры и средств
автоматики, правила построения структурных схем, критерии регулирования,
перспективы внедрения ЭВМ в процессе разработки и эксплуатации скважин, правила
технически грамотной эксплуатации аппаратуры и средств автоматики; приобрести
навыки проведения сравнительного анализа средств контроля и автоматики; узнать
о сложностях применения средств автоматики и перспективах их развития.
На основе полученных теоретических знаний обучаемые должны научиться
выполнять практические и лабораторные работы, а в последующем уметь монтировать
простую аппаратуру, расшифровывать и проводить анализ диаграмм записи
аппаратуры, производить оценку полученной информации, корректировать режимы
разработки и эксплуатации систем автоматики технологических процессов
нефтегазового производства с использованием специализированной аппаратуры.
ВВЕДЕНИЕ
Автоматизация технологических процессов является решающим фактором в повышении
производительности труда и улучшении качества выпускаемой продукции.
Технологические процессы современных промышленных объектов требуют
контроля большого числа параметров и сложны в управлении. В связи с этим при
проектировании и эксплуатации промышленных установок исключительное значение
придается вопросам профессионализма специалистов работающих на предприятиях ТЭК
[1].
За годы развития переработки нефти и нефтехимической промышленности
наблюдается усложнение процессов, что требует более четкого управления ими. В
первой половине XX века, появились приборы регистрации и контроля параметров,
так называемые контрольно-измерительные приборы - КИП. Зарождение, становление
и развитие приборов измерения и контроля, процесс от автоматического регулирования
до АСУ и управление на макро- и микроуровне является неотъемлемой частью
процессов нефтегазового производства, нефтепереработки и нефтехимии.
Дальнейшее совершенствование приборов регистрации, контроля и управления
параметрами привело к автоматизации и телемеханизации нефтепереработки и
нефтехимии. Последнее привело к компьютеризации и управлению процессами, то
есть к автоматизированным системам управления (АСУ).
И, естественно, что прогресс, в приборостроении и аппаратостроении в АСУ
является интересной задачей, решение которой необходимо для определения
дальнейших перспектив развития на основе преодоления глобальных проблем
управления в нефтегазовой сфере.
В [2] сформулированы шесть основных современных проблем оперативного
управления производством и автоматизации в нефтегазовом производстве:
Учет добычи, движения и использования углеводородного сырья, нефти, газа,
нефтепродуктов, для решения которой важно обеспечить возможность мониторинга
учетных операций, в том числе с лицензионных участков, а также обеспечивать
проведение внутренних и внешних аудитов по учету нефти, что в свою очередь
требует разработки соответствующих измерительных средств, а также
программно-информационной системы.
Управление территориальными активами, организация технического обслуживания
и ремонта оборудования, обеспечение безопасности производства и персонала. Для
решения данной проблемы требуется разработка программно-информационных средств,
обеспечивающих учет, планирование технического обслуживания и ремонтов,
контроль состояния производственных активов и выполненных работ; контроль
заключения и выполнения договоров с подрядчиками на выполнение работ; контроль
за нахождением персонала на производственных объектах; возможность обучения
персонала по месту на тренажерах; наличие на рабочих местах актуальной
документации на использование оборудования, на технологию выполнения процедур и
операций.
Высокий уровень энергопотребления производства и необходимость
мероприятий по энергосбережению и энергоэффективности. Для решения указанной проблемы
требуются программно-информационные средства обеспечивающие учет, планирование
технического обслуживания и ремонтов, контроль состояния энергопотребления по
элементам технологического процесса; выявление объектов энергопотребления со
сверхнормативным уровнем потребления электроэнергии; контроль за выполнением
мероприятий по энергосбережению.
Разнообразие средств АСУ ТП, моделирующих и информационных систем. Данная
проблема требует разработки программно-информационных средств, обеспечивающих
формирование массива исходной информации для стратегического (планы развития и
размещения производства), среднесрочного (годовые и месячные планы) и
оперативного (суточные и сменные планы) планов управления; удовлетворения
требований к составу и структуре документов в соответствии с внутренним
регламентом предприятия, требованиями стандартизации акционеров; унификации
доступа и разграничения полномочий при работе с документами.
Минимизация затрат на эксплуатацию системы при максимальном уровне
информационного сервиса, предоставляемого лицам, принимающим решения. Для
решения проблемы требуются: разработка методологии выполнения работ по развитию
MES-уровня, автоматизации неавтоматизированных ранее производственных объектов
и программно-информационных средств обеспечивающих: поддержание в актуальном
состоянии баз данных и работоспособном состоянии программных средств системы;
контроль функционирования программных средств системы (по обмену информацией с
системами АСУТП, ERP и др.); фиксация действий персонала, включенного в работу
системы.
Увеличение средств и труда на добычу каждой тонны нефти, обусловленное
тем, что месторождения дешевой нефти в Западной Сибири, открытые в конце 1950-х
годов, постепенно истощаются. В нефтеносном регионе остались в основном запасы
со сложной добычей, требующие новых технологических решений и дополнительных
капитальных вложений. Для решения данной проблемы необходимо повысить
эффективность капитальных вложений и облегчить управление извлечением нефти;
повысить эффективность капитальных вложений и облегчить управление извлечением
нефти из недр за счет подхода, получившего название «умные месторождения»,
«интеллектуальные месторождения», «интеллектуальные нефтепромыслы»,
«интеллектуальные скважины»; оптимизировать работы всех промысловых объектов:
скважин, коллекторов, трубопроводов и других наземных объектов.
Глава 1. ОБЩИЕ СВЕДЕНИЯ ОБ АВТОМАТИЧЕСКОМ
УПРАВЛЕНИИ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ, КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ (САР)
.1 Основные понятия и определения теории
автоматического регулирования
Известно, что технический процесс характеризуется совокупностью данных,
величин, показателей. Совокупность операций для пуска, остановки процесса,
поддержания постоянства показателей процесса или изменения их по заданному закону
называется управлением.
Поддержание показателей на заданном уровне или изменение их по заданному
закону, называется регулированием, т.е. регулирование - это часть управления. И
если эти процессы управления осуществляются без участия человека (оператора),
то они называются автоматическими.
Устройство, осуществляющее технологический процесс, показатели которого
нужно управлять или регулировать, называется объектом управления, или
управляемым объектом. Объектами управления могут быть буровой насос, буровой
станок, привод бурового станка и т. д. или отдельные их узлы, выполняющие те
или иные операции технологического процесса, например, лебедка бурового станка.
Техническое устройство, осуществляющее управление в соответствии с
программой (алгоритмом), называется автоматическим управляющим устройством.
Совокупность объекта управления и управляющего устройства называется
системой автоматического управления (САУ).
Нас интересуют не все операции автоматического управления, а только
регулирование, т. е. те операции, которые относятся к поддержанию или изменению
показателей процесса.
Всякий процесс регулирования может вестись
· без контроля результата - регулирование по разомкнутому циклу;
· с контролем результата - регулирование по замкнутому циклу.
Примером регулирования по разомкнутому циклу без контроля результата
(расхода Q) может служить стабилизация подачи
промывочной жидкости Q при
работе поршневого насоса на полную производительность при включении
соответствующей скорости коробки перемены передач (нерегулируемый привод и нет
сброса промывочной жидкости). Здесь при значительных (не аварийных) изменениях
характеристики гидравлического тракта (по причине зашламования забойной части,
вывалов кусочков породы со стенок скважины и т. п.) расход промывочной жидкости
остается постоянным.
В приведенном примере объектом управления является буровой насос с
нерегулируемым приводом (насосная установка). Управляющим (регулирующим)
органом, который должен содержать объект для осуществления управления подачей
промывочной жидкости, является коробка перемены передач.
Регулирование по разомкнутому циклу применяется значительно реже, чем
регулирование по замкнутому циклу в силу нестабильности характеристик
элементов. Элементы системы подвержены различного рода возмущениям. В приведенном
примере это может быть изменение коэффициента заполнения цилиндров насоса по
причине изменения параметров промывочной жидкости или всасывающего тракта.
Рассмотрим пример регулирования по замкнутому циклу с контролем
результата - расхода Q. На
рис. 1.1 приведена структурная схема регулятора (стабилизатора) расхода
промывочной жидкости Q.
Здесь расход Q контролируется датчиком расхода ДР.
Задатчиком З посредством регулировки напряжения Uзад устанавливается требуемый расход Q. Частота оборотов вала двигателя n (следовательно, и расход Q) определяется нагрузкой и напряжением Uг, которое зависит от значения ∆U.
∆U = Uзад - Uос1, (1.1)
где Uос1- напряжение на выходе датчика (Uд), пропорциональное расходу Q, и называется напряжением обратной связи. И эта связь в
данном случае отрицательная (условно обозначается закрашиванием сектора):
уменьшает значение Uзад. При отклонении расхода Q от заданного значения изменяется и Uос1, что приводит к изменению n и тем самым к восстановлению расхода Q.
Автоматическое поддержание заданного закона изменения показателей
процесса с помощью обратной связи называется автоматическим регулированием. В
рассмотренном примере один показатель - Q. И он называется регулируемой величиной.
Итак, основываясь на рассмотренном примере, будем считать, что
автоматическое устройство, которое осуществляет автоматическое регулирование,
называется автоматическим регулятором.
В свою очередь, управляемый регулятором объект, называется регулируемым
объектом.
Совокупность регулируемого объекта и автоматического регулятора
составляют систему автоматического регулирования (САР).
По функциональному назначению автоматические системы подразделяются на
разомкнутые системы автоматического управления, замкнутые системы
автоматического управления и системы автоматического контроля.
Рассмотрим примеры, демонстрирующие работу рассмотренных схем.
1. Пример. Стабилизатор тока накала электронных ламп. Схема демонстрирует
регулирование по разомкнутому циклу.
Поддержание постоянства тока накала IН происходит без участия оператора, т.е. контроль не
осуществляется.
. Пример Ручное регулирование частоты вращения ω
вала электрического
двигателя.
Частота вращения ω вала приводного двигателя Д является функцией
напряжения на клеммах генератора Uг, которое при постоянной частоте
вращения якоря (ωВД = const) определяется током в обмотке возбуждения ОВГ
генератора. Для регулирования или поддержания постоянным частоты вращения ω
оператор следит за
показаниями вольтметра V,
проградуированного в размерностях частоты вращения ω
и, меняя вручную
реостатом Р ток Iовг в обмотке возбуждения, добивается
требуемого значения ω.
Здесь наблюдаем замкнутую систему регулирования. Но такая система ручного
регулирования обладает существенным недостатком: малая точность регулирования и
нежелательное наличие оператора. Кроме того, действует ряд возмущающих
воздействий: меняющийся момент на валу двигателя МС, изменение
температуры среды, износ щеток электрических машин и т.д., отсюда неточность
системы регулирования; система не применима при быстро протекающих процессах.
Рассмотренные примеры позволяют подвести основу для рассмотрения вопроса
о принципах регулирования.
1.1.1 Принципы регулирования
При работе рассмотренных выше систем становится очевидным воздействие
внешних факторов (возмущающих воздействий). Самым простым решением для учета
каждого возмущающего воздействия является установка соответствующего датчика.
Однако данный подход не всегда реализуем. В качестве выхода из создавшегося
положения обычно применяют приемы, в соответствии с которыми сначала измеряют
отклонение от заданной величины с установкой датчика, а затем по измеренному
отклонению вводят поправку (аналогично примеру с изменением положения движка
реостата Р).
Различают следующие основные принципы регулирования:
· по отклонению;
· по возмущению;
· компенсации;
· комбинированный.
На рис.1.4 демонстрируется схема автоматического регулирования
(стабилизации) частоты оборотов вала двигателя с использованием одного датчика
контроля за отклонением частоты оборотов от заданного значения, в качестве
которого выступает тахогенератор.
Эта схема, по сути, является трансформацией схемы ручного регулирования
(рис.1.3) в схему автоматического регулирования (рис.1.4). Здесь оператор
заменен электрической системой контроля и системой воздействия на реостат Р. В
схему введены реостаты Р1 и Р2, реверсивный двигатель РД,
электронный усилитель ЭУ, и редуктор Ред, который механически связанн с движком
реостата Р.
Рассмотрим основные регулирующие элементы (рис. 1.4):
· объект регулирования, в качестве которого выступает двигатель, все
остальные элементы входят в регулятор системы;
· показатель процесса регулирования, в качестве которого выступает угловая
скорость ω, т.е. регулируемая величина, которая может быть как
постоянной, так и меняться в соответствии с каким либо законом;
· регулирующий орган, роль которого играет якорная цепь
двигателя, меняя положение или состояние которой, можно изменять регулируемую
величину;
· регулирующее воздействие - напряжение в якорной цепи
двигателя;
· задающая величина (воздействие) системы - Uзад; т. е. это такая величина, которая
пропорциональна или функционально связана с регулируемой величиной и служит для
изменения уровня последней; через Uзад задается
конкретное значение ω.
Если ∆U = Uзад - Uос = 0, то наступит состояние равновесия. Uос - это напряжение обратной связи,
которое пропорционально регулируемой величине ω. При изменении ω
(по причине изменения
момента Мс сопротивления на валу двигателя) изменяется
вырабатываемое тахогенератором напряжение обратной связи Uос, нарушается равновесие (∆U ≠ 0), что приводит по цепочке (ЭУ - РД - Ред - Р - Iовг) к изменению вырабатываемого
генератором напряжения Uг и к восстановлению регулируемой
величины ω.
В рассмотренной схеме контроль регулируемой величины осуществляется активным
способом, а цепь передачи сигнала с выхода на вход системы называется главной
обратной связью.
Принцип регулирования, который заложен в схеме (рис.1.4), называется
принципом регулирования по отклонению. Системы, которые строятся по данному
принципу, всегда содержат обратную связь. Это значит, что они работают по
замкнутому циклу.
Под системой автоматического регулирования по отклонению будем понимать
такую систему, при работе которой измеряется отклонение регулируемой величины
от заданного значения, а в функции от значения отклонения вырабатывается некое
регулирующее воздействие, сводящее это отклонение к минимальному значению.
Отметим и запомним, что системы регулирования по отклонению всегда должны
содержать главную отрицательную обратную связь.
Еще одним принципом регулирования, который гораздо реже используется в
автоматических регуляторах, является принцип регулирования по возмущению или
принцип компенсации, а также компенсация возмущения.
На рис. 1.5 демонстрируется схема генератора постоянного тока. Данная
иллюстрация поясняет принцип регулирования по возмущению. Здесь генератор
работает на изменяющуюся нагрузку Rн.
Напряжение U является регулируемой величиной. ЭДС
генератора пропорциональна потоку возбуждения Φв Ег = k Φв.
Ег = k Φв.
Будем считать, что изменение напряжения на зажимах генератора
обуславливается только внутренним сопротивлением якорной цепи:
U = Е
- Iн· Rа, (1.2)
Е = U + Iн· Rа = Iн· Rн + Iн· Rа = Iн (Rа + Rн) (1.3)
Допустим, что при изменении тока Iн напряжение U = Uо = const.
Тогда должно быть выполнено условие
Е= Uо + ΔЕ = Uо + IнRа = k (Φво + ΔΦв). (1.4)
Значит, ΔЕ изменится за счет
Φв·Uо = k ·Φво и ΔΦв = (Rа/k)·Iн = c Iн, (1.5)
т.е. изменение регулируемой величины ΔΦ должно быть пропорционально току
нагрузки Iн. Это условие выполняется за счет компаундной обмотки,
дающей дополнительный поток возбуждения Φдоп, пропорциональный нагрузке
возмущения - току IН. Исходя из этого, основная обмотка
(основной поток возбуждения Фосн) предназначается для создания
начального напряжения UО. Значение ΔЕ определяется компаундной обмоткой.
Обе обмотки создают суммарный магнитный поток Фво.
В результате изменения тока нагрузки IН меняется суммарный
поток Фво, а напряжение Uо постоянно.
Это и есть пример реализации принципа компенсации в регулировании, когда при
измерении нагрузки (возмущающем воздействии) в функции от измеренного значения
вырабатывается некое регулирующее воздействие, которое позволяет регулируемой
величине оставаться постоянной. Системы, работающие по такому принципу
компенсации, относятся к системам разомкнутого типа, не имеющим обратной связи.
Основное достоинство таких систем - быстродействие. Вместе с тем, система
обладает и рядом недостатков:
· за счет того, что у объекта есть несколько возмущающих воздействий и для
систем компенсации нужно измерять в отдельности каждое возмущающее воздействие
и в функции от него вырабатывать регулирующее воздействие, что значительно
усложняет систему;
· проблема измерения неэлектрических возмущающих воздействий;
· неоднозначность и сложность зависимости регулирующего от возмущающего
воздействия.
Из-за указанных недостатков рассмотренные системы применяются гораздо
реже в сравнении с системами, реализующими принцип регулирования по отклонению.
Третий принцип регулирования - комбинированный (сочетание первых двух
принципов). Применяется еще реже, чем первые два. Достоинства и недостатки
такие же. Системы довольно сложные и их изучение пока не предусмотрено.
.1.2 Классификация систем автоматического
регулирования
По закону воспроизведения (изменения) регулируемой величины замкнутые
системы регулирования делятся на три вида:
· системы стабилизации,
· системы программного регулирования,
· следящие системы.
Отличаются они друг от друга не принципиально, а лишь режимом работы и
конструктивно. Они имеют общую теорию и исследуются одинаковыми методами.
Система стабилизации - это система поддержания постоянства регулируемой
величины. Рассмотренные выше системы относятся к системам стабилизации.
В системах программного регулирования регулируемая величина должна
изменяться по заранее известной программе во времени.
Следящая система. Здесь регулируемая величина изменяется по неизвестному
произвольному закону. Закон определяется некоторым внешним задающим
воздействием (произвольно).
В зависимости от характера регулирующего воздействия на исполнительный
элемент системы автоматического регулирования подразделяются на:
· системы непрерывного,
· импульсного и
· релейного регулирования.
В системах непрерывного регулирования сигналы на выходе всех элементов
системы являются непрерывными функциями сигналов на входе элементов.
Системы импульсного регулирования отличаются тем, что в них через
определенные промежутки времени происходит размыкание и замыкание контура
регулирования специальным устройством. Время регулирования делится на импульсы,
в течение которых процессы протекают так же, как и в системах непрерывного
регулирования, и на интервалы, в течение которых воздействие регулятора на
систему прекращается. Такие регуляторы применяются для регулирования медленно
протекающих процессов (регулирование температуры в промышленных печах,
температуры и давления в котлах).
В системах релейного регулирования размыкание контура регулирования
производится одним из элементов системы (релейным элементом) в зависимости от
внешнего воздействия.
В зависимости от результатов, получаемых при автоматическом
регулировании, различают два вида автоматического регулирования:
· статическое и
· астатическое.
Статическим называется такое автоматическое регулирование, при котором
регулируемая величина при различных постоянных внешних воздействиях на объект
регулирования принимает по окончании переходного процесса различные значения,
зависящие от величины внешнего воздействия (например, нагрузки).
На рис. 1.6, а представлен регулятор уровня воды в баке. В регуляторе
уровня воды при увеличении расхода воды q уровень снижается, через поплавок и рычаг открывается
задвижка, приток q1 возрастает и наоборот.
Система статического регулирования имеет следующие характерные свойства:
равновесие системы возможно при различных значениях регулируемой
величины;
каждому значению регулируемой величины соответствует единственное
определенное положение регулирующего органа.
Для
осуществления такой связи между датчиком и исполнительным элементом контур
регулирования должен состоять из так называемых статических звеньев, у которых
в состоянии равновесия выходная величина однозначно зависит от входной:  . Это объясняется тем, что расход воды q
равен притоку q1 при
каком-то строго определенном, своем уровне Н. Изменится расход, изменится
уровень, приток будет равен расходу - и опять наступит равновесие.
. Это объясняется тем, что расход воды q
равен притоку q1 при
каком-то строго определенном, своем уровне Н. Изменится расход, изменится
уровень, приток будет равен расходу - и опять наступит равновесие.
Регулятор,
осуществляющий статическое регулирование, называется статическим регулятором.
Для
характеристики степени зависимости отклонения регулируемой величины от нагрузки
в теории регулирования пользуются понятием неравномерности, или статизма
регулирования.
Пусть
график зависимости установившихся значений регулируемой величины x от
нагрузки q (характеристика регулирования) имеет вид,
изображенный на рис.1.6, б (характеристика регулирования дана в конкретных
координатах для регулятора уровня воды в баке; ниже координаты приводятся в
общем виде, для любых статических регуляторов). Максимальное значение регулируемой
величины хmax соответствует
холостому ходу объекта (нагрузка отсутствует); минимальное значение  - номинальной нагрузке - qном.
- номинальной нагрузке - qном.
Для
определения статизма регулирования воспользуемся относительными координатами:
 , (1.6)
, (1.6)
 , (1.7)
, (1.7)
где
φ
- относительное значение регулируемой
величины;
 - сама
регулируемая величина;
- сама
регулируемая величина;
 -
минимальное значение регулируемой величины (при номинальном режиме);
-
минимальное значение регулируемой величины (при номинальном режиме);
 и qном
- базовые значения величин;
и qном
- базовые значения величин;
λ - относительное значение нагрузки.
Тогда
неравномерность δ
(или статизм) системы в общем случае есть
частная производная в данной точке (или относительная крутизна характеристики
регулирования в этой точке):
 (1.8)
(1.8)
Если
характеристика регулирования линейная, то статизм будет постоянной величиной
для всех значений нагрузки. И он может быть определен следующим образом:
 ,
,  (1.9)
(1.9)
Статический
регулятор поддерживает не строго постоянное значение регулируемой величины, а с
ошибкой, которая называется статической ошибкой системы. Таким образом, статизм
регулирования - это относительная статическая ошибка при изменении нагрузки от
холостого хода до номинальной.
В
некоторых системах статическая ошибка (даже если и сотые доли процента)
нежелательна, тогда переходят к регулированию, при котором она равна нулю - к
астатическому регулированию. Характеристика регулирования такой системы
представляется линией, параллельной оси нагрузки.
Астатическим
называется автоматическое регулирование, при котором при различных постоянных
значениях внешнего воздействия на объект отклонение регулируемой величины от
заданного значения по окончании переходного процесса становится равным нулю.
В
астатическом регуляторе уровня Н воды в баке (рис. 1.7) поплавок переремещает
ползунок реостата в ту или иную сторону в зависимости от изменения уровня от
заданного значения, тем самым запитывая двигатель, управляющий положением
заслонки. Выключен двигатель будет тогда, когда уровень воды достигнет
заданного значения.
Система
астатического регулирования имеет следующие характерные особенности:
равновесие
системы имеет место только при одном значении регулируемой величины, равном
заданному;
регулирующий
орган имеет возможность занимать различные положения при одном и том же
значении регулируемой величины.
В
реальных регуляторах первое условия выполняется с некоторой погрешностью. Для
выполнения второго условия в контур регулирования вводится так называемое
астатическое звено. В приведенном примере - двигатель, обладающий тем
свойством, что при отсутствии напряжения его вал неподвижен в любом положении,
а при наличии напряжения - непрерывно вращается.
В
зависимости от источника энергии, получаемой регулятором, различают
· прямое и
· непрямое регулирование.
В системах прямого регулирования энергия для перестановки управляющего
элемента получается от датчика (как пример - статический регулятор уровня
воды).
В системах непрямого регулирования энергия для перестановки управляющего
элемента получается от постороннего источника (пример - астатический регулятор
уровня воды).
Системы автоматического регулирования с несколькими регулируемыми
величинами (например, давление пара в котле, подача воды в котел, подача
топлива и воздуха в топку) подразделяются на системы несвязанного и связанного
регулирования.
Системами несвязанного регулирования называются такие, в которых регуляторы,
предназначенные для регулирования различных величин, не связаны друг с другом и
могут взаимодействовать только через общий для них объект регулирования. Если в
системе несвязанного регулирования изменение одной из регулируемых величин
влечет за собой изменение других регулируемых величин, то такая система
называется зависимой; и если не влечет, то система называется независимой.
Системами связанного регулирования называются такие, в которых регуляторы
различных регулируемых величин связаны друг с другом и помимо объекта
регулирования.
Система связанного регулирования называется автономной, если связи между
входящими в ее состав регуляторами таковы, что изменение одной из регулируемых
величин в процессе регулирования не вызывает изменения остальных регулируемых
величин.
Замкнутые системы автономного регулирования, имеющие только одну
(главную) обратную связь, называются одноконтурными. Системы автоматического
регулирования, имеющие помимо одной главной обратной связи еще одну или
несколько главных или местных обратных связей, называются многоконтурными.
В зависимости от вида характеристик элементов, из которых состоят
системы, все системы делятся на:
· линейные и
· нелинейные.
Линейными называются системы, которые состоят только из элементов,
имеющих линейные характеристики; переходные процессы в таких элементах
описываются линейными дифференциальными уравнениями.
Нелинейными называются системы, которые имеют один или несколько
элементов с нелинейными характеристиками; переходные процессы в таких системах
описываются нелинейными дифференциальными уравнениями.
При классификации по виду используемой энергии все системы можно
подразделить на:
· электрические,
· гидравлические,
· пневматические,
· электрогидравлические,
· электропневматические и т. д.
В зависимости от числа регулируемых величин системы автоматического
регулирования (САР):
· одномерные,
· двухмерные,
· многомерные.
Многомерные САР могут быть системами несвязанного и связанного
регулирования. Система связанного регулирования может быть автономной.
1.1.3 Алгоритм (закон) регулирования
Всякую систему автоматического регулирования можно рассматривать как
вычислительное устройство, которое вырабатывает регулирующее воздействие в
функции от величины рассогласования ε, нагрузки q и других величин.
А сама функциональная связь, функциональная зависимость, между желаемым
регулирующим воздействием на объект yо, величиной рассогласования ε, нагрузкой q , производных и
интегралов двух последних величин, называется алгоритмом регулятора или законом
регулирования.
Аналитически в общем виде
 = ƒ (ε, ε', ε'', …
= ƒ (ε, ε', ε'', …  ε dt,…q, q', q'',…).
(1.9)
ε dt,…q, q', q'',…).
(1.9)
По
виду этой функциональной зависимости и различают принципы регулирования.
Например,
алгоритм регулятора по отклонению будет иметь зависимость:
= ƒ (ε, ε', ε'', …  ε dt). (1.10)
ε dt). (1.10)
Алгоритм
регулятора по нагрузке:
= ƒ (q, q', q'',…)
(1.11)
Уравнение
(1.9) - алгоритм комбинированного регулирования.
Несколько
конкретных алгоритмов регулирования:
алгоритм
пропорционального регулирования
= a0 · ε , (1.12)
где
регулирующее воздействие пропорционально ε, и сами регуляторы называются П-регуляторами;
алгоритм
регулирования пропорциональный с воздействием по первой производной:
= а0
·
ε + а1 · ε' , (1.13)
алгоритм
регулирования пропорциональный с воздействием по первой и второй производной:
= а0 · ε + а1 · ε' + а2 · ε'', (1.14)
интегральный
закон регулирования - И-регулятор:
= b0
ε dt,
(1.15)
алгоритм
регулирования пропорциональный с воздействием по интегралу - ПИ-регулятор:
= а0
·
ε + b0 ε dt
(1.16)
1.1.4 Основные требования к автоматическим
системам управления
Применение автоматического управления производственными процессами должно
улучшать их технико-экономические показатели. Исключением являются случаи,
когда основным и решающим фактором является улучшение труда обслуживающего
персонала и если это обуславливается также соображениями техники безопасности.
Сформулированы общие требования к САУ:
· максимальная простота, где не всегда необходима «полная автоматизация»,
т.е. системе поручают только те функции, которые совершенно необходимы;
· САУ должна быть гибкой, т.е. допускать быстрый переход (в
случае необходимости) к ручному управлению из нескольких мест;
· САУ должна действовать как при нормальных, так и при
аварийных режимах;
· максимальная надежность САУ;
· снижение стоимости автоматизированных установок;
· применение типовых узлов, аппаратов и ряд др.
Непосредственно к самой САУ все требования можно разбить на следующие
четыре категории:
· требования к величине запаса устойчивости;
· требования к величине отклонения регулируемого параметра в
установившемся режиме (статическая точность);
· требования к поведению системы в переходном процессе
(качество переходного процесса);
· требования к динамической точности системы, т.е. к величине
отклонения при наличии непрерывно изменяющихся воздействий.
1.2 Передаточные функции линейных систем.
Структурные схемы и их преобразования
При исследовании САР широко используются структурные схемы, которые
представляют собой условное графическое изображение дифференциального
уравнения.
При составлении структурных схем каждое звено системы (группа звеньев)
обозначается прямоугольником, в который вписывается его передаточная функция.
При этом различают четыре основных типа дифференциальных уравнений и их
графическое изображение:
1. Звено с одной входной и одной выходной величиной (рис.1.8);
уравнением изображения этого звена будет:
 , (1.17)
, (1.17)
а
графическое изображение:

1. Безинерционное звено с коэффициентом передачи К (рис.1.9):
 (1.18)
(1.18)

3. Звено с двумя входными и одной выходной величиной (рис.1.10):

.
Звено с двумя передаточными функциями и двумя входными сигналами (рис.1.11):

 (1.19)
(1.19)
Используя
эти изображения, составляются структурные схемы. Например, структурная схема
ЭМУ в виде двух звеньев первого порядка:

Здесь:
 ;
;  и
и 
Для исследования системы необходимо знать ее передаточную функцию, для
чего необходимо познакомиться с преобразованиями структурных схем.
. Последовательное соединение звеньев: вход каждого последующего звена
соединяется с выходом предыдущего (рис.1.13).

 ,
,  ,
,  и
и
 (1.20)
(1.20)
Итак, передаточная функция последовательно соединенных звеньев равна
произведению передаточных функций отдельных звеньев:
 (1.21)
(1.21)
2. Параллельное соединение звеньев: входная величина одинакова для
звеньев, а выходные величины суммируются (рис.1.14):
 ,
,  ,
,  (1.22)
(1.22)
Уравнение
сумматора:
 . (1.23)
. (1.23)
Передаточная
функция:
 (1.24)
(1.24)
Передаточная
функция параллельно соединенных звеньев равна сумме передаточных функций
звеньев.
.
Охват звена обратной связью (рис.1.15). Исходные уравнения:
для
охватываемого звена  , (1.25)
, (1.25)
для
звена обратной связи  (1.26)
(1.26)
для
сумматора  , (1.27)
, (1.27)
здесь знак “+” для ПОС, знак “-” для ООС.
В уравнениях исключаем промежуточные величины:
 (1.28)
(1.28)
и
передаточная функция
 (1.29)
(1.29)
Основные правила преобразования структурных схем
1. Группу последовательного, параллельного соединения звеньев или
охваченных обратной связью соединения звеньев можно заменить одним звеном с
соответствующей передаточной функцией.
. Точку приложения или съема воздействия можно переносить через одно или
несколько звеньев, добавляя в преобразуемую цепь звено с такой передаточной
функцией, чтобы выходной сигнал этой цепи не изменился.
Пример преобразования структурной схемы системы с перекрестной обратной
связью (опущен оператор s)
показан на рис. 1.16.
для освобождения от перекрестной связи точка съема воздействия 1
переносится в точку 2 с добавлением в цепь обратной связи (W5), звено с передаточной функцией W3 (в соответствии с правилом 2);
находится передаточная функция звена W6 (последовательное соединение звеньев с передаточными
функциями W3 и W5 );
находится передаточная функция звена W7 (охват звена с передаточной функцией W2 обратной связью - звено обратной связи с передаточной
функцией W6 );
находится передаточная функция звена W8 (последовательное соединение звеньев с передаточными
функциями W1 и W7 );
находится передаточная функция звена W9 (охват звена с передаточной функцией W8 обратной связью - звено обратной связи с передаточной
функцией W4);
находится передаточная функция звена W10 - системы (последовательное соединение звеньев с
передаточными функциями W9 и W3).
1.3 Статика систем
автоматического регулирования
Статика регулирования изучает равновесные, установившиеся состояния,
которые имеют место при постоянных значениях возмущающих и управляющих
воздействий на систему.
В результате изменения воздействия от одного постоянного значения до
другого в системе возникает переходный процесс. Если САР устойчива, то
координаты системы при этом будут стремиться к некоторым установившимся
значениям. Эти конечные значения и рассматривает статика.
1.3.1 Статические характеристики элементов и
звеньев САР
Всякий элемент системы регулирования может характеризоваться несколькими
входными и выходными координатами.
Для звена в целом можно записать ℓ уравнений:
Хвых1 = ƒ1 (Хвх1, …Хвх m) (1.30)
Хвых2 = ƒ2 (Хвх2, …Хвх m)
Эта система уравнений, описывающая установившийся процесс, называется
Хвых ℓ= ƒℓ (Хвх ℓ, …Хвх m )
уравнениями статики звена.
Уравнения статики могут быть получены из уравнений динамики при
приравнивании нулю всех производных от координат и от возмущающих воздействий,
поскольку значения тех и других в установившемся режиме постоянны.
Возьмем частный случай, когда звено характеризуется одной координатой
(одно управляющее воздействие). Статическая характеристика такого звена: Хвых
= ƒ(Хвх).
Такими простейшими статическими характеристиками описываются многие
измерительные, преобразовательные, усилительные, управляющие элементы систем
регулирования.
В зависимости от вида функции ƒ(Хвх) звенья разделяются на
· статические, обладающие статической характеристикой, и
· астатические, не имеющие статической характеристики.
Статические характеристики, в свою очередь, делятся на линейные, у
которых функция ƒ(Хвх) в рассматриваемом диапазоне изменения
Хвх и Хвых есть линейная функция
Хвых = а + bХвх,
(1.31)
где а и b - постоянные, и нелинейные, у
которых функция ƒ(Хвх) имеет более сложный вид.
Графически статическая характеристика линейного звена прямая. Примером
статической характеристики линейного звена является характеристика
ненагруженного тахогенератора: E = к ω
(коэффициент а = 0), где
E - ЭДС тахогенераторара; ω
- угловая скорость; k - коэффициент передачи тахогенератора.
Часто уравнение статики линейного звена приводят к виду, чтобы вместо
текущих значений координат фигурировали их отклонения от некоторого начального
значения:
ΔХвх = Хвх - Хо
вх, (1.32)
где Хо вх - начальное значение; Хвх - текущее
значение.
Аналогично
ΔХвых = Хвых - Хо
вых. (1.33)
Подставим в первоначальное уравнение статики:
Хо вых + ΔХвых = а + b (Хо вх + Δ Хвх)
Очевидно, для начального состояния
Хо вых = а + bХо
вх (1.34)
Вычтем из (1.30) (1.31), получим уравнение статики в отклонениях:
ΔХвых = b·
ΔХвх
(1.35)
Видно, что выбыл коэффициент а, т. е. характеристика по уравнению статики
в отклонениях всегда проходит через начало координат с тем же углом наклона:
В САР есть звенья, характеризующиеся двумя входными координатами и одной
выходной. К таким звеньям относятся все объекты регулирования: входными
координатами объекта регулирования является регулирующее воздействие и
возмущение. Статическая характеристика в данном случае выглядит:
φ = ƒ (μ, q ), (1.36)
где φ - регулируемая величина объекта;
μ - регулирующее воздействие;
Графически в треугольной системе координат функция изображается в виде
поверхности.
Подобное изображение весьма неудобно. Поэтому статические характеристики
объектов представляются на плоскости в виде семейства характеристик:
φ = ƒ1 (μ) , либо φ
= ƒ2 (q)
q=const μ=
const
1.3.2 Статические характеристики соединений
звеньев
Многие звенья САР по своей конструкции являются направленными, т.е.
воздействия в них передаются только в одном направлении. Ниже рассматриваются
звенья направленного действия.
Наиболее употребительными соединениями звеньев являются:
· параллельное,
· последовательное и
· охват звена жесткой обратной связью.
Параллельное соединение звеньев.
При параллельном соединении звеньев входные координаты всех звеньев
равны, а выходные суммируются:
Хвх1 = Хвх2 = Хвх3 = Хвх, Хвых
= Хвых1 + Хвых2 + Хвых3 (1.37)
Для построения статической характеристики параллельных звеньев необходимо
в одной системе координат с одинаковым масштабом построить статические
характеристики отдельных звеньев и их ординаты сложить .
При линейных статических характеристиках:
Хвых1 = k1 · Хвх1,
Хвых2 = к2 · Хвх2,
Хвых3 = к3 · Хвх3, (1.38)
………………….
Хвых = (k1 + k2 + k3+…+ kn) Хвх = К · Хвх
Статический коэффициент передачи параллельно соединенных звеньев равен
сумме коэффициентов передачи отдельных звеньев:
К = (k1 + k2 + k3+…+ kn) (1.39)
Последовательное соединение звеньев.
При последовательном соединении направленных звеньев выходные координаты
предыдущего звена являются входными координатами последующего.
Для построения результирующей характеристики строятся отдельные
характеристики в разных квадрантах. Наиболее простым является построение в
случае трех звеньев (рис.1.25).
первого звена, во втором квадранте построена характеристика второго
звена, в третьем - третьего. Зададимся некоторым значением Хвх1
(точка 1), ему соответствует Хвых1, которое равно Хвх2 и
т.д.
При последовательном соединении более трех звеньев сначала проводится их
комбинация по три, находятся характеристики групп по три звена в каждой и
аналогичным способом находится затем уже характеристика соединения.
При последовательном соединении линейных звеньев (частный случай):
Хвых1 = k1 Хвх1,
Хвых2 = k2 Хвх2, (1.40)
Хвых3 = k3 Хвх3,
результирующая характеристика Хвых3 = k1k2k3Хвх1

Рис.1.25. Последовательное соединение звеньев - а), построение
статической характеристики системы из трех последовательно соединенных
нелинейных звеньев - б).
В первом квадранте построена статическая характеристика Хвых1=
ƒ (Хвх1)
Таким образом, в случае последовательного соединения линейных звеньев
коэффициент передачи системы К равен произведению коэффициентов передач
отдельных звеньев:
К = k1k2k3 (1.41)
Охват звена жесткой обратной связью
Звеном с обратной связью называется такое устройство, при помощи которого
часть выходного сигнала передается на вход данного звена (или одного из
предыдущих звеньев).
Когда передаваемое обратной связью воздействие зависит только от выходной
величины и не зависит от времени, обратная связь называется жесткой:
Согласно схеме: часть выходного сигнала звена I подается на его вход через звено II. Пусть статическая характеристика охватываемого звена (без
обратной связи) Хвых = ƒ(Хвх) и статическая
характеристика обратной связи Хос = φ (Хвых). Тогда статическая
характеристика системы будет
Хвых = ƒ [ Хвх′ ± φ
(Хвых)]
(1.42)
Знак «+»- при положительной обратной связи; «-» - при отрицательной
связи.
В системах регулирования по отклонению регулятор, подключенный к объекту,
образует отрицательную обратную связь, поскольку он стремится
противодействовать возмущающему воздействию.
На рис. 1.27 показано построение статической характеристики при
отрицательной обратной связи.
В первом квадранте строится статическая характеристика охватываемого
звена I, во втором- характеристика звена
обратной связи II. Результирующая
характеристика III строится в
первом квадранте.
Для построения статической характеристики запишем уравнение сумматора: Хвх
= Хвх′ - Хос или Хвх′ = Хвх
+ Хос. Отсюда вытекает и правило построения суммарной
характеристики: задаемся выходной величиной системы - точка 1, по ней находим Хвх
- точка 2 и Хос - точка 3; к отрезку 1-2 прикладываем отрезок 2- 4,
равный 1-3 - точка 4 является результирующей и т. д.
Отрицательная обратная связь (ООС) делает результирующую характеристику
более пологой, чем исходная, уменьшает коэффициент передачи звена.
Рассмотрим статическую характеристику системы при положительной обратной
связи (ПОС). На рис. 1.28 показано построение статической характеристики
системы при ПОС. Характеристики охватываемого I звена и звена обратной связи II рисуются в одном (первом) квадранте. Для ПОС уравнение
сумматора Хвх = Хвх′ + Хос, или Хвх′
= Хвх - Хос. Отсюда почти аналогичное, как и при
отрицательной обратной связи, и построение характеристики: точка 2
результирующей характеристики определяется как разность отрезков (0 - 3) минус
(0 -1) и т. д.
Положительная обратная связь делает результирующую характеристику более
крутой, увеличивает коэффициент передачи.
Рассмотрим приведенных два случая для линейных звеньев:
Хвых = k0
Хвх и Хос
= kос Хвых, (1.43)
где k0 - коэффициент передачи охватываемого
звена.
Результирующая характеристика
Хвых = k0
Хвх = k0 (Хвх′ ± kОС Хвых). (1.44)

 X′
X′ (1.45)
(1.45)
Здесь
знак минус относится к ПОС, знак плюс - к ООС.
Коэффициент
передачи звена с обратной связью:
 (1.46)
(1.46)
ПОС
увеличивает коэффициент передачи, ООС - уменьшает.
1.4 Понятие об устойчивости систем автоматического регулирования
Всякая САР подвержена воздействию возмущающих сил. Эти силы стремятся
вывести систему из состояния равновесия. Если система устойчива, то она
противостоит действию возмущающих сил, а будучи выведенной из равновесия,
возвращается к нему с определенной точностью. Неустойчивая система после
действия возмущающих сил не возвращается к равновесному состоянию, а либо
удаляется от него, либо совершает недопустимые колебания около равновесного
состояния.
Понятие устойчивости может быть проиллюстрировано на примере
шар-плоскость (рис.1.29).
Пример 1. Рассмотрим рис.1.29, а. Под действием возмущающих сил шар
переместился из точки Ао в точку А1. После действия этих
сил шар вернется в точку Ао - положение шара на вогнутой плоскости
устойчиво. Поскольку есть трение, то, конечно, шар вернется не точно в точку Ао,
а остановится рядом. Система будет устойчивой, если она от возмущенного
состояния перейдет в некоторую конечную область, окружающую невозмущенное
состояние равновесия.
Здесь и далее точка Ао - невозмущенное состояние равновесия
системы, точка А1 - возмущенное состояние системы.
Пример 2 - рис.1.29, б. Здесь шар не вернется в свое состояние равновесия
в точку Ао - случай неустойчивого положения шара на плоскости.
Рис. 1.29. Иллюстрация понятия устойчивости на примере плоскости и шара.
Есть и другие виды систем.
Пример 3 - рис.1.43, в. Система устойчива в малом, но неустойчива в
большом.
Пример 4 - рис. 1.29, г. Полуустойчивое состояние равновесия.
Пример 5 - рис. 1.29, д. Безразличное состояние равновесия [3-5].
Глава 2. МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
.1 Основные метрологические термины и
определения. Понятие измерения
Метрология зародилась в глубокой древности, когда начали формироваться
первые государства, стала развиваться торговля, появилась необходимость
выполнять достаточно большие общественные работы. Исторические памятники
называют её возраст: более 6 тыс. лет.
На каждом этапе своего развития метрология решала собственные задачи,
отражающие потребности общества. Вместе с этим менялось и само понятие
метрологии. В дословном переводе с древнегреческого (от metron - мера и 1оgos -
учение) метрология - наука о мерах. Измерить величину - значит сравнить ее с
мерой.
Многие века меры были в основном антропометрическими (связанными с
размерами человеческого тела - пядь, фут, локоть, аршин, сажень) или обиходными
(например, первоначально дюйм - длина трех ячменных зерен, приставленных одно к
другому своими концами). Раздробленность территорий и народов обусловила
огромное разнообразие однородных мер. Так, к концу XVIII в. в разных странах
существовало (округленно) 280 различных футов (мера длины), 390 фунтов (мера
веса, в современном понимании - мера массы). С развитием торговых и финансовых
связей отсутствие единых мер стало вызывать существенные трудности.
Важным событием в развитии метрологии стало принятие Национальным
собранием Франции в 1790 г. Декрета о реформе мер. В основу декрета легла
предложенная группой академиков метрическая система мер. В качестве базовой
была выбрана естественная мера длины, равная одной десятимиллионной доле четверти
парижского меридиана, которая получила название метра. Второй (производной)
мерой системы был назван килограмм, равный массе одного кубического дециметра
чистой воды при температуре 4 °С. В 1799 году были изготовлены и сданы на
хранение в Архив Французской республики платиновые эталоны этих мер, названные
«метром Архива» и «килограммом Архива».
К настоящему времени к Метрической конвенции присоединились 48
государств, в которых сосредоточено более 95% мирового промышленного капитала.
День подписания Метрической конвенции - 20 мая - предложено отмечать как
Всемирный день метрологии.
Главный элемент системы измерений в любой стране - национальный
метрологический институт (НМИ). В соответствии с Метрической конвенцией многие
промышленные страны учредили или реорганизовали свои НМИ. Первыми среди них
стали: Федеральный физико-технический институт Германии в 1887 г., Главная
палата мер и весов России в 1893 г., Национальная физическая лаборатория
Великобритании в 1900 г., Национальное бюро стандартов NBS Соединенных Штатов
Америки в 1901 г. (ныне - Национальный институт стандартов и технологий NIST).
К концу XIX в. все страны, подписавшие Метрическую конвенцию, получили
национальные эталоны метра и килограмма, изготовленные в 1889 г. по единой
технологии из платино-иридиевого сплава с наивысшей возможной для того времени
точностью. Те прототипы этих эталонов, которые оказались наиболее близкими по
своим значениям к архивным эталонам 1799 г., получили статус международных
эталонов и поступили в Международное бюро мер и весов (МБМВ).
Развитие метрологии в России получило серьезный импульс с назначением в
1892 г. управляющим Депо образцовых мер и весов крупнейшего российского ученого
Д.И. Менделеева. По его инициативе Депо было преобразовано в Главную палату мер
и весов (1893), ставшую одним из первых в мире национальных научных учреждений
метрологического профиля. Под руководством Д.И. Менделеева была проведена
работа по созданию комплекта российских эталонов и их международным сличениям,
начала создаваться государственная метрологическая служба, реализована широкая
программа научных исследований в области метрологии, проведена подготовка к
внедрению в России метрической системы
Международный словарь основных и общих терминов метрологии [6] дает самое
краткое определение метрологии как науки об измерениях.
Измерения сопутствуют человеку буквально на каждом шагу. В повседневной
жизни мы постоянно сталкиваемся с измерениями расстояний, масс, времени,
температуры, давления. В современной промышленности ежедневно выполняются
миллиарды измерений. Доля затрат на выполнение измерений составляет в среднем
10-15% от общих трудозатрат, а в электронике от -60 до -80%. О роли измерений в
научных исследованиях достаточно определенно высказался Д.И. Менделеев: «Наука
начинается... с тех пор, как начинают измерять; точная наука немыслима без
меры».
Итак, в дальнейшем под термином метрология - мы будем понимать науку об
измерениях, методах и средствах обеспечения их единства и способах достижения
требуемой точности.
Разделы метрологии:
Законодательная метрология - раздел метрологии, предметом которого
является установление обязательных технических и юридических требований по
применению единиц физических величин, эталонов, методов и средств измерений,
направленных на обеспечение единства и необходимости точности измерений в
интересах общества.
Теоретическая метрология - раздел метрологии, предметом которого является
разработка фундаментальных основ метрологии.
Практическая (прикладная) метрология - раздел метрологии, предметом
которого являются вопросы практического применения разработок теоретической
метрологии и положений законодательной метрологии.
Предметом метрологии является получение качественной или количественной
информации о свойствах объектов окружающего мира путем измерения. Само
измерение - сложная процедура, включающая целый ряд последовательных и
взаимодействующих элементов. Совокупность и порядок следования элементов
процедуры измерения конкретного свойства фиксируется в форме соответствующей
методики выполнения измерений.
Начальным элементом всякого измерения является его задача (цель). Задача
измерения в общем случае - это получение результата измерения требуемого
качества, т. е. необходимой точности и достоверности. Формулирование конкретной
измерительной задачи осуществляется с учетом априорной (полученной до
проведения самого измерения) информации об измеряемом объекте и его свойствах.
Анализ априорной информации позволяет заранее определить характеристики
предстоящего измерения, в том числе достижимый уровень его точности.
Объект измерения - это реальный объект (тело, вещество, поле, явление,
процесс, организм), обладающий некоторой суммой свойств и находящийся в
многосторонних и сложных связях с другими объектами.
Субъект измерения (человек, выполняющий измерение) принципиально не может
охватить объект целиком, во всем многообразии его свойств и связей. Поэтому его
взаимодействие с объектом измерения возможно только на основе модели объекта.
Модель объекта измерения строится в соответствии с целью измерения на основе
априорной информации об объекте и условиях измерения. Построение адекватной
модели объекта измерения является сложной и неформализуемой задачей. Субъект
измерения осуществляет выбор принципа, метода и средства измерений.
Принцип измерения - научно описанное явление (или эффект), положенное в
основу метода измерения. Например, при эталонных измерениях электрического
напряжения используется эффект Джозефсона, при измерении температуры -
термоэлектрический эффект, при измерении скорости - эффект Доплера.
Метод измерения - логическая последовательность операций, описанная в
общем виде и применяемая для сравнения конкретного проявления свойства объекта
со шкалой измерений этого свойства. Методы измерений весьма разнообразны и
могут быть классифицированы по различным признакам. Зачастую методу измерения
дается собственное название не потому, что он существенно отличается от
известных методов, а лишь для удобства его практического использования.
Например, методы непосредственной оценки, противопоставления, замещения, совпадения,
дифференциальный, нулевой методы являются, по существу, разновидностями метода
сравнения с мерой.
Метод измерения реализуется с помощью средств измерений, которые
рассмотрим ниже.
Важную роль в процессе измерения играют условия измерения - совокупность
влияющих величин, описывающих состояние окружающей среды и средства измерений.
К влияющим относят величины, не измеряемые в конкретной процедуре измерения, но
оказывающие влияние на его результаты (температура, давление, влажность,
электрическое напряжение, частота питания в сети и др.). Отклонение от
нормальных условий измерения приводит к изменению состояния объекта измерения и
средства измерений, что может вызвать расширение интервала неопределенности
(или появление дополнительной погрешности измерения).
Измерительный эксперимент является центральным элементом процедуры
измерения. В узком смысле - это отдельное, однократное измерение, которое часто
называют наблюдением. В общем случае измерительный эксперимент содержит ряд
последовательных операций по взаимодействию средства измерений с измеряемым
объектом, получению, преобразованию и индикации сигналов измерительной
информации, регистрации результатов наблюдений.
Завершает процедуру измерения операция обработки экспериментальных
данных, включающая проведение вычислений согласно принятому алгоритму,
получение результата измерения, оценку его точности и достоверности, запись
результата и его неопределенности (или погрешности) в соответствии с
установленной формой представления.
Реализация современных высоких технологий невозможна без применения всего
арсенала метрологии. Такие технологии требуют получения и переработки огромного
объема измерительной информации, без которой их внедрение не дает ожидаемого
эффекта. Для осуществления измерений широко применяется микропроцессорная
техника и персональные компьютеры, а также интеллектуальные средства измерений.
Возросшие требования к качеству измерения превратили его в сложную процедуру
подготовки и проведения измерительного эксперимента, обработки и интерпретации
полученной информации. В связи с большим разнообразием измерений, их
классифицируют по областям измерений, т. е. совокупностям видов измерений,
свойственных какой-либо области науки или техники и выделяющихся своей
спецификой.
Принято различать следующие области и виды измерений:
. Геометрические измерения (длина, угол, отклонения формы и расположения
поверхностей, параметры шероховатости поверхности, координаты сложной
поверхности).
. Механические измерения (масса, сила, крутящий момент, напряжение и деформация,
твердость, параметры движения) метрологии
. Измерения расхода, вместимости, уровня, параметров потока.
. Измерения давления и вакуума.
. Физико-химические измерения (вязкость, плотность, влажность,
концентрация компонентов, кондуктометрия, рН-метрия).
. Температурные и теплофизические измерения.
. Измерения времени и частоты.
. Электрические и магнитные измерения на постоянном и переменном токе
(сила тока, напряжение, энергия, мощность, сопротивление, проводимость,
емкость, индуктивность, добротность, параметры электрических и магнитных полей,
магнитные характеристики материалов).
. Радиоэлектронные измерения (интенсивность, параметры формы и спектра
сигналов, параметры трактов и антенн, измерения свойств веществ и материалов
радиотехническими методами).
. Виброакустические измерения (параметры вибрации, акустические измерения
в газовой и жидкой среде и в твердых телах).
. Оптические и оптико-физические измерения (сила света, освещенность,
энергетические параметры излучения, характеристики лазерного излучения,
оптические свойства и характеристики материалов).
. Измерения параметров ионизирующих излучений и ядерных констант.
. Биологические и биомедицинские измерения [7].
2.2 Виды средств измерения (СИ)
Средство измерений - техническое средство, предназначенное для измерений,
имеющее нормированные метрологические характеристики, воспроизводящее и (или)
хранящее единицу физической величины, размер которой принимают неизменным (в
пределах установленной погрешности) в течение известного интервала времени.
Суть средства измерений, заключается, во-первых, в «умении» хранить (или
воспроизводить) единицу физической величины; во-вторых, в неизменности размера
хранимой единицы. Эти важнейшие факторы и обуславливают возможность выполнения
измерения (сопоставление с единицей), т.е. «делают» техническое средство
средством измерений. Если размер единицы в процессе измерений изменяется более
чем установлено нормами, таким средством нельзя получить результат с требуемой
точностью. Это означает, что измерять можно лишь тогда, когда техническое
средство, предназначенное для этой цели, может хранить единицу, достаточно
неизменную по размеру во времени.
Большинство средств измерений являются конструктивно законченными
техническими устройствами. Каждое средство измерений имеет нормированные
метрологические характеристики, которые оказывают влияние на качество
результатов измерений.
Своеобразным средством измерений является человек, который использует
свои органы чувств (осязание, обоняние, зрение, слух, вкус) при органолептических
измерениях, интуицию - при эвристических измерениях, знания и навыки - при
экспертных измерениях.
Средства измерений классифицируют по принципам действия, построения и
виду измеряемой величины. Важное значение имеют их метрологические характеристики.
Классификация средств измерений
. по метрологическому назначению (образцовые СИ; рабочие СИ)
. по выполняемым функциям
· измерительные преобразователи: аналоговые;
аналогово-цифровые; цифро-аналоговые;
· метафизические величины: однозначная; многозначная; набор
мер; магазин мер;
· стандартные образцы: стандартный образец свойства;
стандартный образец состава;
· средства сравнения;
· измерительные приборы;
· измерительные устройства;
· измерительные цепи;
· измерительные механизмы;
· измерительные принадлежности.
. по уровню агрегатирования и автоматизации
· автоматические СИ: измерительные автоматы, измерительные
роботы;
· автоматизированные СИ;
· измерительные установки: поверочные; эталонные; измерительные
машины;
· измерительные системы: информационные; контролирующие;
управляющие, гибкие и др.
· измерительно-вычислительные комплексы;
. по уровню стандартизации
· стандартизированные СИ
· узаконенные СИ: государственные эталоны; рабочие СИ;
· нестандартизированные СИ
. по отношению к измеряемой величине
· основные СИ;
· вспомогательные СИ [8].
.3 Системы и единицы физических величин
Понятие «величина» как оценка размеров какого-либо объекта появилось еще
до математики, а математическое понятие «величина» на сегодняшний день
связывают с числом. В физике и математике укоренился подход, в соответствии с
которым существуют «размерные» и «безразмерные» величины. При этом «величина»
рассматривается как число, наименование единицы - как «размерность». В
метрологии эти понятия имеют принципиально иное значение, из-за чего иногда
возникают недоразумения и путаница.
Применяемое для количественной оценки определенного свойства в математике
и часто в физике понятие «величина» идеально - это абстрактная количественная
оценка величины любого вида (физической либо нефизической), определяемая числом
как номинальное или абсолютно точное значение. В метрологии документом РМГ
29-99 [9] введено понятие «физическая величина» (величина) - одно из свойств
физического объекта (физической системы, явления или процесса), общее в качественном
отношении для многих физических объектов, но в количественном отношении
индивидуальное для каждого из них. В «Международном словаре основных и общих
терминов метрологии» (VIM-93) понятие величина (измеримая) раскрывается как
«характерный признак (атрибут) явления, тела или вещества, которое может
выделяться качественно и определяться количественно».
Понятие «физическая величина» (сюда же включаются и «химические» либо
иные величины) настолько фундаментально, что дать ему корректное определение практически
невозможно. Понятно что физическая величина -свойство, присущее реальным
объектам, которое на множестве свойств объектов может быть индивидуальным в
количественном отношении, то есть иметь разные уровни интенсивности. Если
уровни свойств доступны количественной оценке аппаратурными методами, их
изучением занимается метрология.
Необходимость оценивания уровней интенсивности таких свойств привела к
появлению в РМГ 29-99 ряда базовых терминов и определений:
Размер физической величины (размер величины) - количественная
определенность физической величины, присущая конкретному материальному объекту,
системе, явлению или процессу;
Значение физической величины - выражение размера физической величины в
виде некоторого числа принятых для нее единиц;
Числовое значение физической величины - отвлеченное число, входящее в
значение величины;
Истинное значение физической величины - значение физической величины,
которое идеальным образом характеризует в качественном и количественном
отношении соответствующую физическую величину.
Вообще, истинное значение физической величины может быть соотнесено с
понятием абсолютной истины. Оно может быть получено только в результате
бесконечного процесса измерений с бесконечным совершенствованием методов и
средств измерений.
Для количественной оценки значений физических величин применяют единицы
соответствующих физических величин. Поскольку существуют объективные связи
между физическими величинами, очевидно, что единицы физических величин не могут
назначаться произвольно. Логика требует объединения единиц физических величин в
достаточно строгую систему.
Система (от древнегреческого σύστημα
- соединенное в одно
целое из многих частей) - множество закономерно соединенных между собой
элементов, образующих определенную целостность, единство.
В определении следует обратить внимание на три важных момента: наличие
элементов, их закономерное объединение и вновь образованное благодаря этому
качество соединения - его целостность. Элементами системы могут выступать
предметы, явления, процессы, принципы, теории; связями - объективно
существующие или искусственно созданные закономерности.
Поскольку физические величины существуют как объективные свойства, а
числовые значения единиц назначают, единицы вторичны по отношению к физическим
величинам. В соответствии с данным положением для получения системы единиц
физических величин теоретически правильным представляется предварительное
создание системы физических величин.
Система физических величин - совокупность физических величин,
образованная в соответствии с принятыми принципами, когда одни величины
принимают за независимые, а другие определяют как функции независимых величин.
В этих системах выбранные независимые величины называют основными, а прочие,
получаемые с их использованием, - производными.
На базе системы физических величин создают систему единиц физических
величин. Главной характеристикой системы единиц физических величин является
наличие системно связанных значений каждой из величин, принятых за единицу.
Единицы независимых величин устанавливают конвенционально (по договоренности),
это основные единицы системы. Остальные единицы системы - производные -
получают из физических формул (количественных уравнений связи между величинами)
[9].
До начала глубокого исследования этой проблемы метрологами системы
физических величин в явном виде не рассматривались, а проявлялись как побочный
продукт эмпирически создаваемых систем единиц. Системы единиц предназначались
для обслуживания конкретных областей физики, например, системы МТС
(метр-тонна-секунда) или СГС (сантиметр-грамм-секунда) для механики, а для
обеспечения механических и электрических измерений использовалась система МКСА
(метр-килограмм-секунда-ампер).
Наличие множества разнообразных единиц для измерений одной физической
величины, например, работы и энергии (эрг, джоуль, калория), приводит к
необходимости пересчета числовых значений при переходе от одной системы к
другой. Такие преобразования не только требовали выполнения лишней работы, но и
приводили к частому появлению механических ошибок. Кооперация
научно-технических областей, в которых применяли разные единицы, привела
пользователей к выводу о необходимости создания универсальной системы единиц,
которая позволяет избавиться от перерасчетов. Такая система требует
соответствующей основы - универсальной системы физических величин.
Универсальная система физических величин должна охватывать максимум
величин, с которыми имеют дело большинство потребителей в своей научной и
производственной деятельности. Они и будут использовать единицы универсальной
системы, образованной на базе соответствующей системы величин. Наряду с этим не
отрицается возможность создания специальных систем единиц для конкретных узких
областей.
В системах величин как в любых системах присутствуют элементы (физические
величины) и связи между ними (уравнения связи между величинами). Уравнениями
связи называют соотношения между величинами, записанные в качественной форме,
например, скорость равна частному от деления расстояния (длины) на время, за
которое это расстояние пройдено
= L/T. (2.1)
Возможны еще две трансформированные формы этого уравнения связи (T = L/V
и L = VT), но из всех этих трех выражений независимым уравнением связи можно
назвать только одно (любое на выбор), поскольку все они несут одну и ту же
информацию.
Строгость системы обеспечивается включением в нее только величин,
связанных известными физическими законами. При этом число независимых связей
оказывается меньше числа величин, поэтому для выражения неизвестных величин
требуются дополнительные шаги, в частности назначение «основных величин»,
условно принимаемых за известные.
Для создания системы физических величин следует:
1. выбрать область распространения системы и определить полный набор
входящих в систему величин (m штук);
2. составить систему уравнений, включающую все независимые уравнения
связи между величинами (n уравнений);
. определить необходимое число основных величин системы (k штук);
. определить (выбрать и назначить) конкретные основные величины
системы, назначить их размерности;
. определить размерности производных величин через размерности
основных, решая независимые уравнения связи между величинами.
Если в результате корректно выполненных действий однозначно определены
размерности всех входящих в систему величин, то действительно создана строгая система
физических величин.
Минимально необходимое число основных величин системы определяют как
разность числа всех входящих в систему величин и числа независимых уравнений
связи между величинами (k = m - n). Минимально необходимое и достаточное для
создания системы число основных величин определяется расчетом, но выбор
конкретных величин, теоретическими положениями не определяется.
Прагматические соображения при выборе основных величин могут быть
основаны на попытке представить систему в наиболее логичном виде, либо на
предположениях о реализации будущей системы единиц физических величин.
Очевидно, что за основные принимают величины, наиболее изученные и наиболее
часто встречающиеся в уравнениях связи. Но в предположении будущего
эталонирования иногда преимущество отдают тем из альтернативных величин,
которые позволят создать более точную, лучше воспроизводимую и более стабильную
единицу. Сторонников любого набора основных величин можно обвинить в
субъективном подходе, что вполне резонно для случаев экспертного выбора.
Назначение размерностей основных величин и определение через них
размерностей производных можно рассматривать как чисто формальную процедуру.
Размерности основных физических величин назначают произвольно, например, базой
для Международной системы единиц физических величин (SI) является система
величин «длина, масса, время, сила электрического тока, термодинамическая
температура, количество вещества, сила света» с размерностями основных величин
L M T I Θ N J.
Размерность dim х любой производной физической величины х, которую
определяют через уравнения связи между величинами, в общем виде можно записать
как произведения размерностей
х = Lα Mβ Tγ Iε Θι Nν Jτ, (2.2)
где показатели α, β, γ, ε, ζ и η являются, как правило, небольшими
целыми числами, которые могут быть положительными, отрицательными или равными
нулю, они называются показателями размерностей. Выражение в форме произведения
символов размерностей, некоторые из которых возведены в степень, называют также
формулой размерности.
Нежелательным результатом могут быть несколько отличающихся выражений для
размерности одной и той же производной величины. Такая ситуация теоретически
недопустима, поскольку свидетельствует об избыточном числе основных величин в
системе. Иначе говоря, нарушение теоретических принципов при выборе числа
основных величин приводит к созданию недостаточно строгой системы физических
величин. Однако такие системы могут создаваться и использоваться из чисто
прагматических соображений.
После построения системы физических величин на ее базе можно построить
систему единиц физических величин.
Система единиц физических величин (система единиц) - совокупность
основных и производных единиц физических величин, образованная в соответствии с
принципами для заданной системы физических величин.
Схема построения системы единиц физических величин
СИСТЕМА ЕДИНИЦ ФИЗИЧЕСКИХ ВЕЛИЧИН (физические формулы дольные и кратные
множители, правила их применения)
ОСНОВНЫЕ ЕДИНИЦЫ (k = m - n) штук
ПРОИЗВОДНЫЕ ЕДИНИЦЫ
СИСТЕМА ФИЗИЧЕСКИХ ВЕЛИЧИН ОСНОВНЫЕ ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ (k = m - n) штук
ПРОИЗВОДНЫЕ ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ размерности [L, M, T, I, J, N,...]
формула размерности [V] = k ·( LαMβTγIδΘεNζJη )
ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ (m штук)
УРАВНЕНИЯ СВЯЗИ МЕЖДУ ВЕЛИЧИНАМИ (n уравнений)
Понятие «размерность величины» в метрологии имеет особый смысл -
выражение в форме степенного одночлена, составленного из произведений символов
основных физических величин в различных степенях и отражающее связь данной
физической величины с физическими величинами, принятыми в данной системе
величин за основные с коэффициентом пропорциональности, равным 1.
Из определения следует, что метрологический термин размерность физической
величины имеет смысл рассматривать при обсуждении систем физических величин, а
не систем единиц физических величин, которые построены на их основе. Понятие
«размерность» в системах единиц физических величин является избыточным, хотя
может использоваться как вспомогательное.
При рассмотрении систем единиц физических величин размерность физической
величины в некоторых ситуациях фактически осложняет понимание связи между
производными и основными единицами. Если в обозначениях единиц момент силы
представляется весьма логичным (произведение единиц силы и длины или ньютон на
метр), то размерность (L2 M T - 2) ясности не добавляет.
Цепочки связей между некоторыми производными и основными величинами оказываются
слишком протяженными и неочевидными. Примеры размерностей некоторых производных
физических величин, образованных в соответствии с базовой для SI системой
величин LMTIΘNJ, приведены в таблице 2.1.
Таблица 2.1
Примеры размерностей производных физических величин в системе LMTIΘNJ
|
Физическая величина
|
Единица
|
|
|
|
|
наименование
|
размерность
|
наименование
|
обозначение международное
|
обозначение русское
|
|
Момент силы
|
L2 M T - 2
|
ньютон-метр
|
N∙m
|
Н∙м
|
|
Электрическое сопротивление
|
L2 M T - 3 I - 2
|
ом
|
Ω
|
Ом
|
|
Теплопроводность
|
L M T - 3Θ - 1
|
ватт на метр-кельвин
|
W/mK
|
Вт/(м/К)
|
|
Сила излучения
|
L2 M T - 3
|
ватт на стерадиан
|
W/sr
|
Вт/ср
|
Архаизмами можно считать такие стандартные термины в РМГ 29-99, как
«размерная физическая величина» и «безразмерная физическая величина».
Размерная физическая величина - физическая величина, в размерности
которой хотя бы одна из основных физических величин возведена в степень, не
равную нулю (сила F в системе LMTIΘNJ является размерной величиной: dim
F=LMT-2). Безразмерная физическая величина - физическая величина, в
размерность которой основные физические величины входят в степени, равной нулю.
Приведенные термины некорректны с лингвистических позиций (напоминают
выражение «безразмерные носки», что противоречит понятию «размер величины»),
поскольку любая физическая величина имеет размер, характеризующий ее
количественную определенность. По сути определений также возникают сомнения,
поскольку в системы физических величин входят основные и производные величины,
каждая из которых имеет размерность.
Не имеющие размерности («безразмерностные») физические величины, например
относительные, следует рассматривать как внесистемные, поскольку они
инвариантны по отношению к любой системе физических величин. Например,
коэффициент полезного действия, относительная влажность, объемные или массовые
доли компонента в растворе и подобные им величины фактически не входят ни в
одну из систем физических величин, хотя характеризуют физические свойства.
Однако следует иметь в виду, что, например выраженные в неименованных или
именованных единицах (в процентах) коэффициенты полезного действия, могут быть
рассчитаны на основе учета потерь в механических, термодинамических,
электрических и других устройствах с различными исходными единицами.
В таблице 2.2 приведены основные единицы Международной системы единиц
физических величин, и указаны годы утверждения их определений.
Таблица 2.2
Основные единицы Международной системы единиц (SI)
|
Физическая величина
|
Единица физической величины
|
|
|
|
|
|
Наименование
|
Размер-ность
|
Наименование
|
Обозначение
|
Определение
|
|
|
междунар.
|
русск.
|
|
|
|
|
|
Длина
|
L
|
метр
|
m
|
м
|
Метр есть длина пути, проходимого светом в вакууме за
интервал времени 1/299792458 секунды (XVII ГКМВ, 1983 г.)
|
|
Масса
|
M
|
килограмм
|
kg
|
кг
|
Килограмм есть единица массы, равная массе международного
прототипа килограмма (I ГКМВ, 1889 г. и III ГКМВ, 1901 г.)
|
|
Время
|
T
|
секунда
|
s
|
с
|
Секунда есть время, равное 9 192 631 770 периодам
излучения, соответствующего переходу между двумя сверхтонкими уровнями
основного состояния атома цезия-133 (XIII ГКМВ, 1967 г.)
|
|
Сила электрического тока
|
I
|
ампер
|
A
|
|
Ампер есть сила неизменяющегося тока, который при
прохождении по двум параллельным прямолинейным проводникам бесконечной длины
и ничтожно малой площади кругового поперечного сечения, расположенным в
вакууме на расстоянии 1 метр один от другого, вызвал бы на каждом участке
проводника длиной 1 метр силу взаимодействия, равную 2х10-7
ньютона (IX ГКМВ, 1948 г.)
|
|
Термо-динамическая температура
|
Θ
|
кельвин
|
K
|
К
|
Кельвин есть единица термодинамической температуры, равная
1/273,16 части термодинамической температуры тройной точки воды (XIII ГКМВ,
1967 г.)
|
|
Количество вещества
|
N
|
моль
|
mol
|
моль
|
Моль есть количество вещества системы, содержащей столько
же структурных элементов, сколько содержится атомов в углероде-12 массой
0,012 килограмма. При применении моля структурные элементы должны быть
специфицированны и могут быть атомами, молекулами, ионами, электронами и
другими частицами или специфицированными группами частиц (XIV ГКМВ, 1971 г.)
|
|
Сила света
|
J
|
кандела
|
cd
|
кд
|
Кандела есть сила света в заданном направлении источника,
испускающего монохроматическое излучение частотой 540х1012 герц,
энергетическая сила света которого в этом направлении составляет 1/683
ватт/стерадиан (XVI ГКМВ, 1979 г.)
|
Международная система единиц физических величин (для краткого обозначения
используется международная аббревиатура SI - сокращение от «Система
Интернациональная Единиц Физических Величин») применяется в большинстве стран
мира, что зафиксировано в их основополагающих метрологических стандартах или
иных НД по стандартизации в метрологии.
В основу Международной системы была положена система единиц физических
величин Д. Джорджи (МКСА), которая первоначально содержала шесть основных
единиц. SI была утверждена Генеральной конференцией по мерам и весам (ГКМВ) в
1960 году. С тех пор система несколько трансформировалась, в частности,
добавлена седьмая основная единица (моль), ликвидированы «дополнительные
единицы» (единицы плоского и телесного угла), изменились определения некоторых
единиц.
Международная система единиц имеет ряд достоинств:
· универсальность (обеспечивает ее применение во всех отраслях производства
и областях науки);
· унификация единиц физических величин;
· унификация механизма образования дольных и кратных единиц;
· когерентность системы.
Унификация единиц физических величин, например давления, заключается в
отказе от таких ранее использовавшихся единиц, как атмосфера физическая,
атмосфера техническая, миллиметры водяного столба, миллиметры ртутного столба и
др., образующих неоправданное разнообразие единиц.
Когерентной является система, в которой производные единицы получают из
основных с коэффициентом в виде неименованной единицы. Например, единица скорости
1 м/с образована делением единицы длины 1 м на единицу времени 1 с, единица
давления 1 Па, образована делением единицы силы 1 Н на единицу площади 1 м2,
которая в свою очередь образована произведением единиц длины 1 м на 1 м.
Наряду с безусловными достоинствами Международной системы единиц у нее
есть и недостатки, в частности универсальность системы и недостаточная
строгость построения. Универсальность любого объекта всегда имеет как
положительную, так и отрицательную стороны.
Пример. Универсальный складной нож с отверткой, пилкой,
консервооткрывателем и другими инструментами позволяет делать множество
операций, но удобства работы такой отверткой или пилой несопоставимы с
комфортом использования специализированных инструментов. Изображения, полученные
с камеры мобильного телефона, веб-камеры или камеры наблюдения не сопоставимы
по уровню качества с картинками фотоаппарата, набирать текст на полной
клавиатуре компьютера намного удобнее, чем сообщения на «мобильнике». Ряд
примеров может быть продолжен.
Недостаточная строгость построения Международной системы единиц
физических величин заключается в избыточном количестве основных единиц. Макс
Планк установил, что для построения универсальной системы достаточно четырех
основных единиц, а число основных единиц SI составляет семь. Последняя единица
появилась существенно позже ранее выбранных, что подтверждает ее избыточность -
ведь система была вполне работоспособной и без нее.
Кроме базисных основных и производных единиц используют также кратные и
дольные единицы, образованные умножением базисной единицы на десять в целой
положительной или отрицательной степени (в SI приняты модули показателей 1, 2,
3, и далее через 3 до 24). При образовании кратных и дольных единиц к базисным
единицам добавляют приставки, наименования и обозначения которых приведены в
таблице 2.3.
Таблица 2.3
Множители и приставки для образования кратных и дольных единиц SI
|
Множитель
|
Приставка
|
|
|
|
|
Наименование
|
Обозначение
|
|
|
|
|
Международное
|
Русское
|
Международное
|
Русское
|
|
|
10 24
|
yotta
|
йотта
|
Y
|
И
|
|
10 21
|
zetta
|
зетта
|
Z
|
З
|
|
10 18
|
exa
|
экса
|
E
|
Э
|
|
10 15
|
peta
|
пета
|
P
|
П
|
|
10 12
|
tera
|
тера
|
T
|
Т
|
|
10 9
|
giga
|
гига
|
G
|
Г
|
|
10 6
|
mega
|
мега
|
M
|
М
|
|
10 3
|
kilo
|
кило
|
k
|
к
|
|
10 2
|
hecto
|
гекто
|
h
|
г
|
|
10 1
|
deca
|
da
|
да
|
|
10 -1
|
deci
|
деци
|
d
|
д
|
|
10 -2
|
centi
|
санти
|
c
|
с
|
|
10 -3
|
milli
|
милли
|
m
|
м
|
|
10 -6
|
micro
|
микро
|
μ
|
мк
|
|
10 -9
|
nano
|
нано
|
n
|
н
|
|
10 -12
|
pico
|
пико
|
p
|
п
|
|
10 -15
|
femto
|
фемто
|
f
|
ф
|
|
10 -18
|
atto
|
атто
|
a
|
а
|
|
10 -21
|
zepto
|
зепто
|
z
|
з
|
|
10 -24
|
yocto
|
йокто
|
y
|
и
|
Не следует забывать, что фактически используемая номенклатура единиц
физических величин значительно шире любой даже самой универсальной системы
единиц. Наряду с единицами SI, положенной в основу стандартов на узаконенные
единицы, широко используют также единицы, заимствованные из других систем или
не входящие ни в какие системы.
Широко известные примеры применения узаконенных единиц, заимствованных из
других систем и разрешенных к применению наравне с единицами SI, таких как
угловые градусы, минуты, секунды; единицы времени, кратные секунде (минута,
час, сутки и другие).
Используют также внесистемные единицы уникального вида (например, парсек,
карат), относительные, относительные логарифмические и условные единицы
(процент, промилле, бел, единицы твердости, единицы светочувствительности
фотоматериалов).
К «внесистемным единицам» можно отнести собственно внесистемные, которые
не входят в строго выстроенные системы физических единиц величин, а также
единицы, не входящие в данную систему, но заимствованные из других систем и
имеющие иные системы собственного построения (миля-кабельтов, минута-час-сутки-неделя-месяц…).
Одним из признаков внесистемных (по отношению к SI) единиц является кратность
(дольность), не соответствующая десяти, например, кратностью 60 связаны угловые
секунды, минуты и градусы, минута и час, секунда и минута.
Для измерений недостаточно назначить единицу физической величины и даже
написать ее подробную спецификацию. Единицу следует воспроизвести с максимально
возможной точностью, например, с помощью эталона, а затем передать рабочим
средствам измерений с помощью эталонных (образцовых) средств измерений.
Кроме физических величин в практике приходится использовать множество
других, которые тоже требуют количественной оценки. Например, счетом оценивают
деньги, штучные товары, «объемы» произведений печати, количество записанной на
носитель информации и многое другое. Оценка (измерение) значений таких величин
может быть корректной в пределах принятых правил (счет денег, перевод их в иную
валюту, определение объема текста в печатных знаках) или откровенно
субъективной (экспертной).
Вполне реализуема аппаратурная оценка некоторых величин из этого ряда,
например автоматический счет единиц продукции, определение количества
информации в файле. В Приложении А ГОСТ 8.417 редакции 2002 г. представлены
«единицы количества информации» бит и байт (1 байт равен 8 бит). Бит - единица
информации в двоичной системе счисления, причем в соответствии со стандартом
МЭК 60027-2 единицы бит и байт «можно применять с приставками SI». Однако
фактически в вычислительной технике при использовании двоичной системы счисления
для кратных приставок используют не 103 = 1000, а 210 =
1024, в результате килобайт равен 1024 байт (1 Кбайт = 1024 байт), мегабайт
равен 1024 Кбайт, гигабайт равен 1024 мегабайт. При этом приставку «кило» в
отличие от установленного в SI обозначения обозначают прописной, а не строчной
буквой.
Свойства, которые не подлежат аппаратурной оценке из-за отсутствия
объективно оцениваемого содержания, а также те, представления о физическом
содержании которых на нынешнем этапе недостаточно корректно, относят к
«нефизическим величинам». В отличие от метрологии, объектом которой являются
аппаратурные измерения физических величин, экспертными оценками и повышением их
объективности занимается квалиметрия. Квалиметрия успешно использует
метрологические методы и приемы для аппаратурно оцениваемых свойств, а также
разрабатывает собственные специфические методы оценивания. Существуют
экспертные методы оценивания объема и качества интеллектуальной работы, знаний
субъекта в определенной области, уровня художественных произведений, жесткости
природных проявлений и ряда других сложных явлений [10-20].
2.4 Метрологические характеристики средств
измерений. Градуировка и поверка средств измерений
.4.1 Метрологические характеристики средств
измерений
Метрологические характеристики средств измерений - это характеристики
свойств, оказывающие влияние на результаты и погрешности измерений. Информация
о назначении метрологических характеристиках приведена в документации на
средства измерений (в ГОСТе, в ТУ, в паспорте). Метрологические характеристики,
установленные нормативными документами, называют нормируемыми.
При установлении совокупности нормируемых метрологических характеристик
для средств измерений конкретного вида необходимо использовать номенклатуру
характеристик, регламентированных государственным стандартом ГОСТ 8.009-84
«ГСИ. Нормируемые метрологические характеристики средств измерений» [21]. В
этом стандарте приведены рекомендации по выбору метрологических характеристик
для различных видов СИ и критерий рациональности основных составляющих
погрешности. Положения ГОСТ 8.009-84 гармонизированы с международными
рекомендациями.
Все метрологические свойства (характеристики) можно разделить на две
группы:
1. свойства, определяющие область применения СИ;
2. свойства, определяющие качество измерения.
Основными метрологическими характеристиками, определяющими свойства
первой группы, являются диапазон измерений и порог чувствительности.
Диапазон измерений - область значений величины, в пределах которых
нормированы допускаемые пределы погрешности. Значение величины, ограничивающее
диапазон измерений снизу или сверху (слева и справа), называют соответственно
нижним или верхним пределом измерений.
Порог чувствительности - наименьшее изменение измеряемой величины,
которое вызывает заметное изменение выходного сигнала.
К метрологическим свойствам второй группы относятся три главных свойства,
определяющих качество измерений: точность, сходимость и воспроизводимость
измерений.
В практике применения средств измерений широко используется такая
характеристика, как класс точности.
Класс точности СИ- обобщенная характеристика, выражаемая пределами
допускаемых погрешностей, а также другими характеристиками, влияющими на
точность. Классы точности конкретного типа СИ устанавливают в нормативных документах.
При этом для каждого класса точности определяют конкретные требования к
метрологическим характеристикам, в совокупности отражающим уровень точности СИ
данного класса. Класс точности позволяет судить о том, в каких пределах
находится погрешность измерений этого класса. Это необходимо знать при выборе
СИ в зависимости от заданной точности будущих измерений.
Требования к назначению, применению и обозначению классов точности
регламентированы в ГОСТ 8.401-80 «ГСИ. Классы точности средств измерений. Основные
положения» [22]. Этот стандарт гармонизирован с международными рекомендациями.
2.4.2 Градуировка и поверка
средств измерений
Градуировкой называется процесс нанесения отметок на шкалы средств
измерений, а также определение значений измеряемой величины, соответствующих
уже нанесенным отметкам для составления градуировочных кривых или таблиц.
Различают следующие способы градуировки.
. Использование типовых шкал. Для подавляющего большинства рабочих и
многих образцовых приборов используют типовые шкалы, которые изготовляются
заранее в соответствии с уравнением статической характеристики идеального
прибора. При регулировке параметрам элементов прибора экспериментально придают
такие значения, при кᴏᴛᴏᴩых погрешность в точках регулировки становится равной
нулю.
. Индивидуальная градуировка шкал. Индивидуальную градуировку шкал
осуществляют в тех случаях, когда статическая характеристика прибора нелинейная
или близка к линейной, но характер изменения систематической погрешности в
диапазоне измерения случайным образом меняется от прибора к прибору данного
типа так, что регулировка не позволяет уменьшить основную погрешность до
пределов ее допускаемых значений.
. Градуировка условной шкалы. Условной называется шкала, снабженная
некоторыми условными равномерно нанесенными делениями, например, через
миллиметр или угловой градус. В результате определяют зависимость числа делений
шкалы, пройденных указателем от значений измеряемой величины. Эту зависимость
представляют в виде таблицы или графика [23].
Калибровка (поверка) средств измерений - это комплекс действий и
операций, определяющих и подтверждающих настоящие (действительные) значения
метрологических характеристик и (или) пригодность средств измерений, не
подвергающихся государственному метрологическому контролю.
Пригодность средства измерений - это характеристика, определяющаяся
соответствием метрологических характеристик средства измерения утвержденным (в
нормативных документах, либо заказчиком) техническим требованиям Калибровочная
лаборатория определяет пригодность средства измерений.
Калибровка сменила поверку и метрологическую аттестацию средств
измерений, которые проводились только органами государственной метрологической
службы. Калибровка, в отличие от поверки и метрологической аттестации средств
измерений, может осуществляться любой метрологической службой при условии, что
у нее есть возможность обеспечить соответствующие условия для проведения
калибровки. Калибровка осуществляется на добровольной основе и может быть
проведена даже метрологической службой предприятия.
Но, тем не менее, метрологическая служба предприятия обязана выполнять
определенные требования. Основное требование к метрологической службе -
обеспечение соответствия рабочего средства измерений государственному эталону,
т. е. калибровка входит в состав национальной системы обеспечения единства
измерений.
Выделяют четыре метода поверки (калибровки) средств измерений:
) метод непосредственного сравнения с эталоном;
) метод сличения при помощи компьютера;
) метод прямых измерений величины;
) метод косвенных измерений величины.
Метод непосредственного сличения с эталоном средства измерений,
подвергаемого калибровке, с соответствующим эталоном определенного разряда
практикуется для различных средств измерений в таких сферах, как электрические
измерения, магнитные измерения, определение напряжения, частоты и силы тока.
Данный метод базируется на осуществлении измерений одной и той же физической
величины калибруемым (поверяемым) прибором и эталонным прибором одновременно.
Погрешность калибруемого (поверяемого) прибора вычисляется как разность
показаний калибруемого прибора и эталонного прибора (т. е. показания эталонного
прибора принимаются за настоящее значение измеряемой физической величины).
Преимущества метода непосредственного сличения с эталоном:
• простота;
• наглядность;
• возможность автоматической калибровки (поверки);
• возможность проведения калибровки с помощью ограниченного
количества приборов и оборудования.
Метод сличения с помощью компьютера - осуществляется с использованием
компаратора - специального прибора, посредством которого проводится сравнение
показаний калибруемого (поверяемого) средства измерений и показаний эталонного
средства измерений. Необходимость использования компаратора обусловливается
невозможностью провести непосредственное сравнение показаний средств измерений,
измеряющих одну и ту же физическую величину. Компаратором может быть средство
измерения, одинаково воспринимающее сигналы эталонного средства измерения и
калибруемого (поверяемого) прибора. Преимущество данного метода в
последовательности во времени сравнения величин.
Метод прямых измерений величины - используется в случаях, когда есть
возможность провести сравнение калибруемого средства измерения с эталонным в
установленных пределах измерений. Метод прямых измерений базируется на том же
принципе, что и метод непосредственного сличения. Различие между этими методами
состоит в том, что при помощи метода прямых измерений осуществляется сравнение
на всех числовых отметках каждого диапазона (поддиапазона).
Метод косвенных измерений - используется в случаях, когда настоящие
(действительные) значения измеряемых физических величин невозможно получить
посредством прямых измерений или когда косвенные измерения выше по точности,
чем прямые измерения. При использовании данного метода для получения искомого
значения сначала ищут значения величин, связанных с искомой величиной известной
функциональной зависимостью. А затем на основании этой зависимости находится
расчетным путем искомое значение. Метод косвенных измерений, как правило,
используется в установках автоматизированной калибровки (поверки).
Для того чтобы передача размеров единиц измерений рабочим приборам от
эталонов единиц измерений осуществлялась без больших погрешностей, составляются
и применяются поверочные схемы.
Поверочные схемы - это нормативный документ, в котором утверждается
соподчинение средств измерений, принимающих участие в процессе передачи размера
единицы измерений физической величины от эталона к рабочим средствам измерений
посредством определенных методов и с указанием погрешности. Поверочные схемы
утверждают метрологическое подчинение государственного эталона, разрядных
эталонов и средств измерений.
Поверочные схемы разделяют на:
) государственные поверочные схемы;
) ведомственные поверочные схемы;
) локальные поверочные схемы.
Государственные поверочные схемы - устанавливаются и действуют для всех
средств измерений определенного вида, использующихся в пределах страны.
Ведомственные поверочные схемы - устанавливаются и действуют на средства
измерений данной физической величины, подлежащие ведомственной поверке.
Ведомственные поверочные схемы не должны вступать в противоречие с
государственными поверочными схемами, если они установлены для средств
измерений одних и тех же физических величин Ведомственные поверочные схемы
могут быть установлены при отсутствии государственной поверочной схемы. В
ведомственных поверочных схемах можно непосредственно указывать определенные
типы средств измерений.
Локальные поверочные схемы - используются метрологическими службами
министерств и действуют также и для средств измерений предприятий, им
подчиненных. Локальная поверочная схема может распространяться на средства
измерений, использующиеся на определенном предприятии Локальные поверочные
схемы в обязательном порядке должны отвечать требованиям соподчиненности,
утвержденным государственной поверочной схемой. Составлением государственных
поверочных схем занимаются научно-исследовательские институты Госстандарта
Российской Федерации. Научно-исследовательские институты Госстандарта являются
обладателями государственных эталонов.
Ведомственные поверочные схемы и локальные поверочные схемы
представляются в виде чертежей.
Государственные поверочные схемы устанавливаются Госстандартом РФ, а
локальные поверочные схемы - метрологическими службами либо руководителями
предприятий.
В поверочной схеме утверждается порядок передачи размера единиц измерений
одной или нескольких физических величин от государственных эталонов рабочим
средствам измерений. Поверочная схема должна содержать по меньшей мере две
ступени передачи размера единиц измерений.
На чертежах, представляющих поверочную схему, должны присутствовать:
) наименования средств измерений;
) наименования методов поверки;
) номинальные значения физических величин;
) диапазоны номинальных значений физических величин;
) допустимые значения погрешностей средств измерений;
6) допустимые значения погрешностей методов поверки [24].
Глава 3. ЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ МЕХАНИЧЕСКИХ ВЕЛИЧИН
Известно [25-29], что автоматизация технологических процессов,
эффективное управление агрегатами, машинами, механизмами требуют многочисленных
измерений разнообразных физических величин.
Датчики (в литературе часто называемые также измерительными
преобразователями), или по-другому, сенсоры являются элементами многих систем
автоматики - с их помощью получают информацию о параметрах контролируемой
системы или устройства.
Датчик - это элемент измерительного, сигнального, регулирующего или
управляющего устройства, преобразующий контролируемую величину (температуру,
давление, частоту, силу света, электрическое напряжение, ток и т.д.) в сигнал,
удобный для измерения, передачи, хранения, обработки, регистрации, а иногда и
для воздействия им на управляемые процессы. Или проще, датчик - это устройство,
преобразующее входное воздействие любой физической величины в сигнал, удобный
для дальнейшего использования.
Используемые датчики весьма разнообразны и могут быть классифицированы по
различным признакам:
В зависимости от вида входной (измеряемой) величины различают:
• датчики механических перемещений (линейных и угловых),
• пневматические,
• электрические,
• расходомеры,
• датчики скорости,
• датчики ускорения,
• датчики усилия,
• датчики температуры,
• давления и др.
В настоящее время существует приблизительно следующее распределение доли
измерений различных физических величин в промышленности: температура - 50%,
расход (массовый и объемный) - 15%, давление - 10%, уровень - 5%, количество
(масса, объем) - 5%, время - 4%, электрические и магнитные величины - менее 4%.
По виду выходной величины, в которую преобразуется входная величина,
различают
• неэлектрические и
• электрические:
• датчики постоянного тока (ЭДС или напряжения),
• датчики амплитуды переменного тока (ЭДС или напряжения),
• датчики частоты переменного тока (ЭДС или напряжения),
• датчики сопротивления (активного, индуктивного или емкостного) и
др.
Большинство датчиков являются электрическими. Это обусловлено следующими
достоинствами электрических измерений:
электрические величины удобно передавать с высокой скоростью на
расстояние;
электрические величины универсальны в том смысле, что любые другие
величины могут быть преобразованы в электрические и наоборот;
они точно преобразуются в цифровой код и позволяют достигнуть высокой
точности, чувствительности и быстродействия средств измерений.
По принципу действия датчики можно разделить на два класса:
• генераторные и
• параметрические (датчики-модуляторы).
Генераторные датчики осуществляют непосредственное преобразование входной
величины в электрический сигнал.
Параметрические датчики входную величину преобразуют в изменение
какого-либо электрического параметра (R, L или C) датчика.
По классам различают датчики:
• аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал,
пропорционально изменению входной величины;
• цифровые датчики, генерирующие последовательность импульсов или
двоичное слово;
• бинарные (двоичные) датчики, которые вырабатывают сигнал только
двух уровней: "включено/выключено" (иначе говоря, 0 или 1); получили
широкое распространение благодаря своей простоте.
Требования, предъявляемые к датчикам:
однозначная зависимость выходной величины от входной;
стабильность характеристик во времени;
высокая чувствительность;
малые размеры и масса;
отсутствие обратного воздействия на контролируемый процесс и на
контролируемый параметр;
работа при различных условиях эксплуатации;
различные варианты монтажа.
3.1 Датчики линейного и углового перемещения
Датчик перемещения - это прибор, предназначенный для определения величины
линейного или углового механического перемещения какого-либо объекта.
Разумеется, подобные приборы имеют колоссальное количество практических
применений в самых разнообразных областях, поэтому существует множество классов
датчиков перемещения, которые различаются по принципу действия, точности, цене
и прочим параметрам.
Следует сразу отметить, что все датчики перемещения можно разделить на
две основных категории
• датчики линейного перемещения и
• датчики
углового перемещения <#"888358.files/image050.gif">; (3.5)
 (3.6)
(3.6)
 (3.7)
(3.7)
 U
U ; (3.8)
; (3.8)
 . (3.9)
. (3.9)
Решая совместную систему уравнений, получим
 (3.10)
(3.10)
Напряжение на выходе тахометрического моста
 . (3.11)
. (3.11)
где kтм - коэффициент передачи тахометрического моста.
Погрешность тахометрического моста составляет ±(2 - 5)%. В динамическом
отношении тахометрические мосты постоянного тока являются безинерционным
звеном.
Для контроля частоты вращения ротора асинхронного электродвигателя
применяют бесконтактное измерительное устройство (рис. 3, б), содержащее
измерительный трансформатор тока ТА и напряжения TV.
Фотоэлектрические датчики скорости вращения регистрируют изменение
светового потока, связанное с изменением положения в пространстве каких-либо
движущихся частей механизмов и машин.
В качестве датчика скорости вращения применяется фотоэлектрический датчик
с прерывателем.
Устройство фотоэлектрического датчика с прерывателем: фотосопротивление,
диск с калиброванными отверстиями, который насаживается на вал измеряемого
объекта. Фотосопротивление подключается последовательно с сопротивлением к
источнику постоянного напряжения.
Принцип действия. Освещенность рабочей поверхности фотосопротивления
прерывается диском с отверстиями (прорезями). Если фотосопротивление не
освещено, по нему течет темновой ток IT. В случае освещенности
фотосопротивления, по нему течет световой ток IC.
Так как проводимость фотосопротивления при облучении его световым потоком
F растет, то его световое сопротивление RC становится меньше
темнового сопротивления RТ.
При вращении диска освещенность фотосопротивления модулируется, и в его
цепи течет пульсирующий ток. Таким образом, ток, проходящий через
фотосопротивление, является функцией светового потока F. Частота пульсаций тока
определяется числом отверстий в диске и его скоростью вращения:Д =
n/60·S, (3.12)
где n- скорость вращения диска, об/мин;число отверстий в диске.
Достоинства: универсальность, простота конструкции, широкий рабочий
диапазон измеряемой синхронной частоты, малая нагрузка на вал испытываемого
объекта, возможность простого промежуточного преобразования частоты обычных
серийных датчиков.
Емкостные датчики скорости вращения используются для преобразования
механических перемещений в изменение емкости.
Устройство: конденсатор переменной емкости C с воздушным диэлектриком,
маломощный трансформатор, со вторичной обмотки которого снимается сигнал,
напряжение которого пропорционально скорости вращения. Емкостные датчики
питаются переменным напряжением (обычно повышенной частоты - до десятков
мегагерц). В качестве измерительных схем обычно применяют мостовые схемы и
схемы с использованием резонансных контуров. В последнем случае, как правило,
используют зависимость частоты колебаний генератора от емкости резонансного
контура, т.е. датчик имеет частотный выход.
Принцип действия датчиков этого типа основан на изменении зарядного тока
конденсатора пропорционально скорости изменения его емкости.
Т.е. вспомним принцип определения емкости конденсатора. Выражается это
действие при помощи следующей формулы:
С= eεₒS/δ, (3.13)
где S - площадь конденсаторной пластины,
e -
относительная проницаемость диэлектрического материала, использованного в
конструкции конденсатора,
εₒ - диэлектрическая проницаемость
вакуума,
δ -толщина пластины диэлектрика, или же
расстояние между несколькими слоями материала.
Таким образом, из приведенной формулы следует, что изменить емкость
конденсатора легко. Достаточно как-то подействовать на площадь пластины
диэлектрического материала, на расстояние между пластинами или непосредственно
на проницаемость использованного при производстве материала. Соответственно,
выбор конкретной величины зависит исключительно от перечня задач, которые
конструкторы поставили перед прибором. Таким образом, можно даже сделать
емкостной датчик своими руками, так как с конструктивной точки зрения это -
обычный плоский или цилиндрический конденсатор, одна из пластин которого
постоянно испытывает контролируемое перемещение в пространстве, что приводит к
изменению емкости. Следует помнить, что приведенная выше формула верна только в
том случае, если вы полностью пренебрегаете краевыми эффектами. Следует знать,
что такого рода электронные приборы интенсивно используются для измерения
угловых и линейных перемещений предметов, вычисления размеров, прикладываемой
работы, влажности, концентрации действующего вещества и прочих характеристик.
Что касается конструктивной стороны вопроса, то упомянутые КИПы
изготавливают плоскопараллельными, в цилиндрических корпусах, со штыревыми
электродами, с прокладкой из диэлектрического материала и вовсе без него [31].
Достоинства: простота, высокая чувствительность и малая инерционность.
Недостатки: влияние внешних электрических полей, относительная сложность
измерительных устройств.
Ультразвуковые датчики скорости вращения применяются для измерения
скорости вращения деталей, установленных в труднодоступных местах или для
измерения в агрессивных средах.
Устройство. Датчик состоит из генератора ультразвуковых колебаний,
излучающей головки, вертушки, вращающейся в трубопроводе, принимающей головки и
демодулятора.
Принцип действия основан на различном поглощении или отражении
ультразвуковых колебаний разнородными средами. При вращении металлической
вертушки за счет различной проводящей способности жидкости и металла несущая
частота ультразвуковых колебаний модулируется частотой вращения вертушки. С
приемной головки сигнал поступает на измерительную аппаратуру. После
демодуляции сигнала получается напряжения с частотой, пропорциональной скорости
вращения вертушки.
Достоинства: высокая точность измерения.
Недостатки: шум, вибрация, производимые при движении излучателя, а также
низкое разрешение.
Магниторезистивные датчики скорости вращения преобразуют измеряемую
неэлектрическую величину в изменение сопротивления ферромагнитных материалов.
Устройство. Датчик состоит из измерительной катушки, которая снабжается
магнитным сердечником. Катушка помещена перед диском или перед вращающимся
ферромагнитным телом (рис. 3.23).
Принцип действия основан на магниторезистивном эффекте. Этот эффект
заключается в том, что некоторые ферромагнитные материалы изменяют свое
электрическое сопротивление при воздействии магнитного поля. Степень этого
изменения зависит от величины напряженности магнитного поля и угла между вектором
напряженности и направлением тока. На магнитный сердечник катушки воздействует
поток индукции постоянного магнита. Последовательность скачков магнитных
свойств диска или вращающегося тела вызывает периодическое изменение магнитного
сопротивления в магнитной цепи катушки, которое наводит в ней э.д.с. с
частотой, пропорциональной скорости вращения.
Магнит, установленный на оси вращения, при каждом обороте проходит один
раз мимо магниторезистивного датчика, вызывая изменение его сопротивления.
Изменение сопротивления с помощью схемы, показанной на рис. 3.24,
преобразуется в изменение напряжения Uа. Зависимость выходного
напряжения сигнала от времени.
Достоинства: простота устройства, надёжность, дешевизна.
Благодаря своим достоинствам микроэлектронные магниторезистивные датчики
скорости вращения нашли широкое применение в автомобильной и бытовой технике.
Глава 4. МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ ОСНОВНЫХ
ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
.1 Методы электрических измерений
Мостовая и компенсационная измерительные схемы.
Существующие методы электрических измерений можно в основном разделить на
два класса: непосредственной оценки и сравнения.
При непосредственной оценке измерительная схема выполняет лишь функции
преобразования выходного сигнала датчика, например, усиливает его или согласует
выходное сопротивление датчика с входным сопротивлением прибора. Этот метод
прост, но применяется редко, так как ему свойственны значительные погрешности
(особенно при изменении напряжения питания датчика).
Метод сравнения обеспечивает более высокие точность и чувствительность.
При этом используются:
· мостовые,
· дифференциальные и
· компенсационные схемы измерения.
Мостовые измерительные схемы применяют постоянного и переменного тока.
Существуют мостовые схемы уравновешенные и неуравновешенные схемы.
Уравновешенные мосты требуют ручной или автоматической балансировки, в то время
как неуравновешенные мосты балансировки не требуют. Уравновешенный мост
представляет собой схему (Рис. 4.1, а), состоящую из ромба, образуемого
четырьмя сопротивлениями R1 R2, R3, Rt.
Резисторы в схеме называют ветвями или плечами моста. Помимо этого в мостовую
схему включены источник тока со своим сопротивлением RE и
измерительный прибор с сопротивлением Rnp. В четырехугольнике также
есть две диагонали, в одну из которых включен миллиамперметр, а в другую -
источник тока. Для подстройки моста одно плечо (R3) является
переменным сопротивлением.
Закон уравновешенного моста: произведение сопротивлений противолежащих
плеч должны быть равны.
1/R2=R3/Rt
или R1·Rt=R2·R3. (4.1)
Если необходимо вычислить неизвестное сопротивление датчика, то можно
включить его в одно из плеч моста, вместо резистора R4· и
воспользоваться формулой:
t=R2·R3/R1.
(4.2)
Ток в диагонали моста, содержащей измерительный прибор, через напряжение
питания:
Inp=U(R1Rt-R2R3)/M.
(4.3)
Основной характеристикой любой схемы является ее чувствительность. Она
определяется как отношение приращения тока в измерительной диагонали ∆Inp
к вызвавшему его изменению сопротивления одного из плеч моста:
сх =∆Inp /∆R, (4.4)
∆Inp=U∆RRt/M , (4.5.)
где ∆Inp - результирующий ток в диагонали моста,
содержащей измерительный прибор, A; U - напряжение питания, В; М - входное
напряжение, В.
Неуравновешенный мост представляет собой схему (Рис.4.1, б), состоящую из
ромба, образуемого четырьмя сопротивлениями R1 R2, R3,
R5, Rt. Помимо этого в мостовую схему включены источник
тока со своим сопротивлением RE и измерительный прибор с
сопротивлением Rnp. Для подстройки моста одно плечо (R5)
является переменным сопротивлением.
В качестве измерительного прибора в неуравновешенных мостах используются
амперметры (так как токи невелики, то обычно мили- и микроамперметры).
Неуравновешенный мост подчиняется тем же законам, что и уравновешенный.
Компенсационные схемы используют для измерения неэлектрических величин,
которые преобразуются датчиками в ЭДС или напряжение. Сигнал датчика
сравнивается с компенсирующим напряжением, вырабатываемым потенциометром.
Подбор компенсирующего напряжения выполняется вручную или автоматически.
Компенсационная схема с ручным уравновешиванием, представлена на рисунке
4.2, а. Измеряемая ЭДС Ех или напряжение Uх
уравновешиваются напряжением Uк, снимаемым с резистора Rк,
представляющего собой часть резистора R. Все сопротивление резистора R включено
в цепь источника питания с ЭДС Е. Схема состоит из двух прямоугольников. В
нижней части находится датчик, имеющий сопротивление Rд. Резисторы в
схеме называют ветвями или плечами моста. В состав схемы включен прибор,
называемый нуль - индикатором (НИ), который служит для определения нулевого
значения тока после компенсации.
Для поддержания стабильного тока питания I можно использовать
регулировочный резистор Rрег и миллиамперметр или применить источник
стабилизированного напряжения как в автоматическом потенциометре.
Ток прибора:
пр =(Uх-Uк )/(Rд +Rк+Rпр
), (4.6)
где Rд- сопротивление датчика, Rк - сопротивление
резистора, Rпр- сопротивление прибора, Uк -
компенсирующее напряжение, Uх - измеряемое напряжение.
Чувствительность компенсационной схемы можно определить как отношение
приращение тока через прибор к вызывающему его изменению измеряемого
напряжения:
сх =∆Inp /∆Uх (4.7)
∆Inp=∆Uх/(Rаб+Rпр+Rд),
(4.8)
аб - внутреннее сопротивление электрической цепи питания,
Rаб=((Rк(R-Rк+Rрег))/(Rк+Rрег). (4.9)
Компенсационный метод измерения применяется в цепях как постоянного, так
и переменного тока.
Дифференциальная схема - это гибрид мостовой и компенсационной схем.
Состоит из двух смежных контуров с источником питания, а измерительный прибор
включен в общую ветвь контуров и реагирует на разность контурных токов. В
дифференциальной схеме могут быть использованы параметрические (с изменяющимся
сопротивлением) и генераторные (с изменяющейся ЭДС) датчики.
Дифференциальная схема включения параметрических датчиков показаны на рисунке
4.3., а (датчик включен в один контур). Дифференциальная схема включения
генераторного датчика показана на рисунке 4.3, б. В этой схеме датчиком
является так называемый дифференциальный трансформатор.
Для расчета токов в дифференциальной схеме используют метод наложения:
сначала определяют токи от одной ЭДС, а затем от другой.
Изменение тока через прибор будет рассчитываться:
 (4.10).
(4.10).
где  - ток через прибор при включении параметрических датчиков в
один контур;
- ток через прибор при включении параметрических датчиков в
один контур;
 - ток через прибор при включении параметрических датчиков в
оба контура.
- ток через прибор при включении параметрических датчиков в
оба контура.
4.2 Методы и средства измерения температуры
Одним из параметров, наиболее часто подлежащих контролю и регулированию
для корректного протекания технологического процесса, является температура.
Температурой называют величину, характеризующую степень нагретости вещества.
Это понятие связано со способностью тела с более высокой температурой
передавать свое тепло телу с более низкой температурой. Переход тепла
продолжается до тех пор, пока температуры тел не сравняются и не наступит
термодинамическое равновесие системы. Одновременно с переходом тепла и
изменением температуры тел меняются их физические свойства. Единица измерения
температуры носит название «градус».
Классификация средств измерений температуры.
Приборы для измерения температуры разделяются в зависимости от физических
свойств, положенных в основу их построения, на следующие группы:
термометры расширения;
манометрические термометры;
электрические термометры сопротивления;
термоэлектрические преобразователи (термопары);
пирометры излучения.
Термометры. Решающий вклад в развитие конструкции термометров внёс немец
Габриэль Даниэль Фаренгейт. В 1709 году он изобрёл спиртовой термометр, а в
1714 - ртутный. Он придал им ту же форму, что применяется и сейчас. Успех его
термометров следует искать во введенном им новом методе очищения ртути; кроме
того, перед запаиванием он кипятил жидкость в трубке.
Рене Антуан де Реомюр не одобрял применения ртути в термометрах
вследствие малого коэффициента расширения ртути. В 1730 г. он предложил
применять в термометрах спирт, а в 1731 году изобрёл водно-спиртовой термометр.
И поскольку Реомюр нашел, что применяемый им спирт, смешанный в пропорции 5:1 с
водой, расширяется в отношении 1000:1080 при изменении температуры от точки
замерзания до точки кипения воды, то предложил шкалу от 0 до 80°.
Температурные шкалы.
Существует несколько градуированных температурных шкал, и за точки отсчета
в них обычно взяты температуры замерзания и кипения воды. Сейчас самой
распространенной в мире является шкала Цельсия. В 1742 шведский астроном Андерс
Цельсий предложил 100-градусную шкалу термометра, в которой за 0 градусов
принимается температура кипения воды при нормальном атмосферном давлении, а за
100 градусов - температура таяния льда. Деление шкалы составляет 1/100 этой
разницы. Когда стали использовать термометры, оказалось удобнее поменять
местами 0 и 100 градусов. Возможно, в этом участвовал Карл Линней (он
преподавал медицину и естествознание в том же Упсальском университете, где
Цельсий - астрономию), который еще в 1838 году предложил за 0 температуры
принять температуру плавления льда, но, похоже, не додумался до второй реперной
точки. К настоящему времени шкала Цельсия несколько изменилась: за 0°C
по-прежнему принята температура таяния льда при нормальном давлении, которая от
давления не очень зависит. Зато температура кипения воды при атмосферном
давлении теперь равна 99,975°C, что не отражается на точности измерения
практически всех термометров, кроме специальных прецизионных.
Известны также температурные шкалы Фаренгейта, Кельвина, Реомюра и др.
Температурная шкала Фаренгейта (во втором варианте, принятом с 1714 г.) имеет
три фиксированные точки: 0° соответствовал температуре смеси воды, льда и
нашатыря, 96° - температуре тела здорового человека (под мышкой или во рту). В
качестве контрольной температуры для сверки различных термометров было принято
значение 32° для точки таяния льда. Шкала Фаренгейта широко распространена в
англоязычных странах, но ею почти не пользуются в научной литературе. Для
перевода температуры по Цельсию (°С) в температуру по Фаренгейту (°F)
существует формула °F = (9/5)°C + 32, а для обратного перевода - формула °C =(5/9)(°F-32).
Обе шкалы - как Фаренгейта, так и Цельсия, - весьма неудобны при проведении
экспериментов в условиях, когда температура опускается ниже точки замерзания
воды и выражается отрицательным числом. Для таких случаев были введены
абсолютные шкалы температур, в основе которых лежит экстраполяция к так
называемому абсолютному нулю - точке, в которой должно прекратиться
молекулярное движение. Одна из них называется шкалой Ранкина, а другая -
абсолютной термодинамической шкалой; температуры по ним измеряются в градусах
Ранкина (°Rа) и кельвинах (К). Обе шкалы начинаются при температуре абсолютного
нуля, а точка замерзания воды соответствует 491,7° R и 273,16 K. Число градусов
и кельвинов между точками замерзания и кипения воды по шкале Цельсия и абсолютной
термодинамической шкале одинаково и равно 100; для шкал Фаренгейта и Ранкина
оно тоже одинаково, но равно 180. Градусы Цельсия переводятся в кельвины по
формуле K = °C + 273,16, а градусы Фаренгейта - в градусы Ранкина по формуле °R
= °F + 459,7. в Европе долгое время была распространена шкала Реомюра,
введённая в 1730 г Рене Антуаном де Реомюром. Она построена не произвольным
образом, как шкала Фаренгейта, а в соответствии с тепловым расширением спирта
(в отношении 1000:1080). 1 градус Реомюра равен 1/80 части температурного
интервала между точками таяния льда (0°R) и кипения воды (80°R), т. е. 1°R =
1.25°С, 1°C = 0.8°R., но в настоящее время вышла из употребления.
После введения Международной системы единиц (СИ) к применению
рекомендованы две температурные шкалы.
Первая шкала - термодинамическая, которая не зависит от свойств
используемого вещества (рабочего тела) и вводится посредством цикла Карно.
Единицей измерения температуры в этой температурной шкале является один кельвин
(1К) - одна из основных единиц в системе СИ. Эта единица названа в честь
английского физика Уильяма Томсона (лорда Кельвина), который разрабатывал эту
шкалу и сохранил величину единицы измерения температуры такой же, как и в
температурной шкале Цельсия.
Вторая рекомендованная температурная шкала - международная практическая.
Эта шкала имеет 11 реперных точек - температуры фазовых переходов ряда чистых
веществ, причём значения этих температурных точек постоянно уточняются.
Единицей измерения температуры в международной практической шкале также
является 1К.
В настоящее время основной реперной точкой, как термодинамической шкалы,
так и международной практической шкалы температур является тройная точка воды.
Эта точка соответствует строго определенным значениям температуры и давления,
при которых вода может одновременно существовать в твердом, жидком и
газообразном состояниях. Причем, если состояние термодинамической системы
определяется только значениями температуры и давления, то тройная точка может
быть только одна. В системе СИ температура тройной точки воды принята равной
273,16 К при давлении 609 Па.
Кроме задания реперных точек, определяемых с помощью эталона температуры,
необходимо выбрать термодинамическое свойство тела, описывающееся физической
величиной, изменение которой является признаком изменения температуры или
термометрическим признаком. Это свойство должно быть достаточно легко
воспроизводимо, а физическая величина - легко измеряемой. Измерение указанной
физической величины позволяет получить набор температурных точек (и соответствующих
им значений температуры), промежуточных по отношению к реперным точкам.
Таблица 4.1.
Соотношение температурной шкалы Фаренгейта и Цельсия
|
шкала Фаренгейта
|
шкала Цельсия
|
|
Точка кипения
|
212°
|
100°
|
|
194°
|
90°
|
|
176°
|
80°
|
|
158°
|
70°
|
|
140°
|
60°
|
|
122°
|
50°
|
|
104°
|
40°
|
|
86°
|
30°
|
|
68°
|
20°
|
|
50°
|
10°
|
|
Точка замерзания
|
32°
|
0°
|
|
14°
|
-10°
|
|
0°
|
-17,8°
|
|
Температура абсолютного нуля
|
-459,67°
|
-273,15°
|
Рассмотрим более подробно средства измерения температуры.
Термометры расширения.
Предназначены для изменения температур в диапазоне от -190 до +500
градусов Цельсия. Принцип действия термометров расширения основан на свойстве
тел под действием температуры изменять объем, а следовательно, и линейные
размеры. Термометры расширения разделяются на жидкостные стеклянные и
механические (дилатометрические и биметаллические).
В качестве термометрической жидкости в жидкостных стеклянных термометров
применяется ртуть, этиловый спирт, керосин, толуол, пентан.
Механические термометры.
Принцип действия дилатометрических термометров основан на преобразовании
изменений температуры в разность удлинений двух твердых тел, обусловленную
различием их температурных коэффициентов линейного расширения. Диапазон
измерения температур составляет от -30 до +1000°С.
Принцип действия биметаллического термометра основан на использовании в
его чувствительном элементе двух металлов с различными температурными
коэффициентами линейного расширения. Металлические пластины прочно соединяются
между собой, в основном путем сварки, и образуют биметаллическую пружину,
которая при нагревании расширяется и замыкает контакт или вращает стрелку
термометра.
Примерная схема биметаллического электрического контроллера, который
применяется в холодильных камерах выглядит следующим образом:
На этом рисунке серый металл расширяется сильнее, чем синий. При
повышении температуры это расширение заставляет пластину cгибаться вверх,
соприкасаться с контактом, для того, чтобы потек ток по пластине и включился
компрессор. Регулируя размер промежутка между пластиной и контактом, можно
управлять температурой внутри камеры.
Биметаллические термометры могут быть различных типов. В самой
распространенной конструкции длинная свёрнутая спиралью лента из биметалла
закрепляется в центре. Другой (внешний) конец спирали перемещается вдоль шкалы,
размеченной в градусах. Такой термометр, в отличие от жидкостного (например,
ртутного) совершенно нечувствителен к изменениям внешнего давления и
механически более прочен. Диапазон измерения температур составляет от -100 до
+600°С.
Манометрические термометры предназначены для измерения температуры в
диапазоне от -160 до +600 градусов Цельсия.
Принцип действия манометрических термометров основан на изменении
давления жидкости, газа или пара, помещенных в замкнутом объеме, при нагревании
или охлаждении этих веществ;
Шкала манометра градуируется непосредственно в единицах температуры.
Манометрический термометр состоит из термобаллона, гибкого капилляра и
собственно манометра. В зависимости от заполняющего вещества манометрические
термометры делятся на газовые (термометр ТГП, термометр ТДГ и др.),
парожидкостные (термометр ТКП, ТПП) и жидкостные (термометр ТПЖ, термометр ТДЖ
и др.). Область измерения температур манометрическими термометрами колеблется в
диапазоне от -60 до +600°С. Термобаллон манометрического термометра помещают в
измеряемую среду. При нагреве термобаллона внутри замкнутого объема
увеличивается давление, которое измеряется манометром. Шкала манометра
градуируется в единицах температуры. Капилляр обычно представляет собой
латунную трубку с внутренним диаметром в доли миллиметра. Это позволяет удалить
манометр от места установки термобаллона на расстояние до 40 м. Капилляр по
всей длине защищен оболочкой из стальной ленты. Манометрические термометры
могут применяться во взрывоопасных помещениях. При необходимости передачи
результатов измерений на расстояние более 40 м манометрические термометры
снабжают промежуточными преобразователями с унифицированными выходными
пневматическими или электрическими сигналами, речь идет о так называемых дистанционных
термометрах.
Недостаток. Наиболее уязвимы в конструкции манометрических термометров
являются места присоёдинения капилляра к термобаллону и манометру.
Электрические термометры сопротивления применяются для измерения
температур в диапазоне от -200 до +650 градусов Цельсия. Термометр
сопротивления ТС это термометр, как правило, в металлическом или керамическом
корпусе, чувствительный элемент которого представляет собой резистор,
выполненный из металлической проволоки или пленки и имеющий известную зависимость
электрического сопротивления от температуры. Самый популярный тип термометра -
платиновый термометр сопротивления, это объясняется высоким температурным
коэффициентом платины, ее устойчивостью к окислению и хорошей технологичностью.
В качестве рабочих средств измерений применяются также медные и никелевые
термометры. Принцип действия термометров сопротивления основан на свойстве
проводников изменять электрическое сопротивление в зависимости от температуры.
Термоэлектрические преобразователи (термопары) используются при измерения
температуры от 0 до +1800 градусов Цельсия. Термопара - старейший и до сих пор
наиболее распространенный в промышленности температурный датчик. Действие
термопары основано на эффекте, который впервые был открыт и описан Томасам
Зеебеком в 1822 г. Наиболее правильное определение этого эффекта следующее: a
difference of potential will occur if a homogeneous material having mobile
charges has a different temperature at each measurement contact. (Если
гомогенный материал, обладающий свободными зарядами, имеет разную температуру
на измерительных контактах, то между контактами возникает разность
потенциалов). Для нас более привычно обычно приводимое в литературе несколько
другое определение эффекта Зеебека - возникновении тока в замкнутой цепи из
двух разнородных проводников при наличии градиента температур между спаями.
Второе определение, очевидно, следует из первого и дает объяснение принципу
работы и устройству термопары. Однако, именно первое определение дает ключ к
пониманию эффекта возникновения ТЭДС не в месте спая, а по всей длине
термоэлектрода, что очень важно для понимания ограничений по точности,
накладываемых самой природой термоэлектричества. Поскольку генерирование ТЭДС
происходит по длине термоэлектрода, то показания термопары зависят от состояния
термоэлектродов в зоне максимального температурного градиента. Поэтому поверку
термопар следует проводить при той же глубине погружения в среду, что и на
рабочем объекте. Учет термоэлектрической неоднородности особенно важен для
рабочих термопар из неблагородных металлов.
Достоинства:
широкий диапазон рабочих температур, это самый высокотемпературный из
контактных датчиков.
спай термопары может быть непосредственно заземлен или приведен в прямой
контакт с измеряемым объектом.
простота изготовления, надежность и прочность конструкции.
Недостатки:
необходимость контроля температуры холодных спаев. В современных
конструкциях измерителей на основе термопар используется измерение температуры
блока холодных спаев с помощью встроенного термистора или полупроводникового
сенсора и автоматическое введение поправки к измеренной ТЭДС.
возникновение термоэлектрической неоднородности в проводниках и, как
следствие, изменение градуировочной характеристики из-за изменения состава
сплава в результате коррозии и других химических процессов.
материал электродов не является химически инертным и, при недостаточной
герметичности корпуса термопары, может подвергаться влиянию агрессивных сред,
атмосферы и т.д.
на большой длине термопарных и удлинительных проводов может возникать
эффект «антенны» для существующих электромагнитных полей.
зависимость ТЭДС от температуры существенно не линейна. Это создает
трудности при разработке вторичных преобразователей сигнала.
когда жесткие требования выдвигаются к времени термической инерции
термопары, и необходимо заземлять рабочий спай, следует обеспечить
электрическую изоляцию преобразователя сигнала для устранения опасности
возникновения утечек через землю.
Принцип действия термопар основан на свойстве разнородных металлов и
сплавов образовывать в спае термо электродвижущую силу, зависящую от
температуры спая.
Пирометры излучения применяются для измерения температуры в диапазоне от
+100 до 2500 градусов Цельсия. Пирометры излучения работают по принципу
измерения излучаемой нагретыми телами энергии, изменяющейся в зависимости от
температуры этих тел. принцип работы которых основан на измерении суммарной
энергии или состава излучения нагретого тела. В зависимости от способа
измерения различают:
· радиационные,
· оптические,
· фотоэлектрические и
· цветовые пирометры.
Радиационные пирометры. Эти пирометры измеряют полную (световую и
тепловую) энергию излучения тела с помощью телескопа и вторичного прибора.
Телескоп радиационного пирометра служит бесконтактным датчиком температуры и
состоит из оптической системы, в фокусе которой находятся рабочие спаи
термобатареи, т. е. нескольких соединенных последовательно термопар.
Термобатарея преобразует излучаемую поверхностью нагретого тела энергию в ТЭДС,
которая измеряется вторичным прибором. При наличии во вторичном приборе
регулирующего устройства радиационный пирометр позволяет автоматически
регулировать температуру в объекте (печь, ванна).
Оптические пирометры. Эти пирометры, называемые также яркостными,
используют для периодического контроля температуры в печах и ваннах. С их
помощью измеряют температуру по монохроматической яркости (интенсивности
излучения) тела в видимой области спектра путем сравнения ее с яркостью нити
эталонной пирометрической лампочки. Изменением тока накала нити ее яркость
доводится до яркости измеряемого тела, при этом нить исчезает на его фоне, так
как тело и нить имеют одинаковую температуру.
Фотоэлектрические пирометры. Фотоэлектрические пирометры служат для
измерения температуры нагретых твердых тел в пределах от 600 до 2000°С. Их
особенно успешно используют для измерения температуры быстропротекающих
процессов.
Принцип действия фотоэлектрического пирометра основан на свойстве
фотоэлементов вырабатывать фотоэлектрический ток, пропорциональный интенсивности
светового потока, который подается на фотоэлемент от излучателя. Так как
интенсивность светового потока, в свою очередь, пропорциональна измеряемой
температуре излучателя, то при помощи фотоэлементов можно измерять температуру
нагретых тел.
Первичным датчиком в пирометре является визирная головка, в ней
расположен фотоэлемент 9.
Головка размещена так, что световой поток от излучателя 3, температура
которого подвергается измерению, через линзу объектива 4 направляется на
фотоэлемент. На пути светового потока, перед фотоэлементом, устанавливается
кассета 7 и красный светофильтр 8, пропускающий лучи только определенной длины
волны. Кассета имеет два отверстия: через одно пропускается от излучателя
световой поток, а через другое - от лампы накаливания 2.
Впереди кассеты расположен электромагнитный вибратор 6, который при
помощи заслонки попеременно, с частотой питающего его тока 50 гц, открывает
отверстия кассеты, вследствие чего на фотоэлемент попадают попеременно световые
потоки то от источника, то от лампы накаливания.
Световой поток от лампы накаливания является эталонным, зависящим по
величине только от тока, протекающего по ее нити. Световой поток от излучателя
сравнивается со световым потоком от лампы накаливания. В результате этого к
электронному усилителю 11 поступает переменное напряжение, величина которого
зависит от разности световых потоков лампы накаливания и излучателя.
Это напряжение усиливается сначала в усилителе, расположенном в визирной
головке, а затем в силовом блоке 14.
Выходной каскад блока нагружен лампой накаливания, через которую течет
постоянный ток, увеличивающийся, если световой поток лампы накаливания меньше
светового потока излучателя, и наоборот.
Таким образом, система непрерывно подтягивает значение тока, текущего
через лампу, до величины, обеспечивающей равенство световых излучателя и
потоков лампы накаливания.
Измеряя ток лампы накаливания, можно определять температуру излучателя.
Измерение тока осуществляется быстродействующим электронным потенциометром 12,
включенным на шунт в цепи лампы, правильная наводка головки на излучатель - при
помощи окуляра 10 и отражателя 5. Прибор имеет разделительный трансформатор 13,
стабилизатор напряжения 15, зажимы 16 для подвода питания от сети.
Цветовые пирометры. Эти пирометры измеряют температуру по отношению
интенсивностей монохроматического излучения тела для двух диапазонов длин волн
красного и сине-зеленого участков видимой части спектра. Такое отношение
характеризует так называемую цветовую температуру, которая совпадает с истинной
для абсолютно черного и серых тел. В отечественных цветовых пирометрах
использован метод красно-синего отношения. Для измерения обоих
монохроматических яркостей используют один приемник излучения (фотоэлемент или
фотосопротивление) с общим каналом усиления измеряемых сигналов.
Преимущество метода цветовой пирометрии перед другими бесконтактными
оптическими способами измерения температуры состоит в том, что в качестве
объекта измерения не обязательно иметь АЧТ. Кроме того, исключается влияние
излучений, изменения рельефов поверхности, расстояния от пирометра,
неселективных поглотителей лучистой энергии, расположенных между объектом измерения
и пирометром (сеток, стекол, диафрагм, призм и т.п.).
Типичными образцами цветовых пирометров являются приборы ЦЭП - 3М и ЦЭП -
4.
Комплект прибора состоит из трех блоков: датчика, блока электроники,
включающего усилительную и решающую схемы, показывающего или регистрирующего
прибора.
Принцип действия прибора основан на автоматическом измерении логарифма
отношения спектральных яркостей в красном и синем участке спектра.
Вычислительное устройство автоматически осуществляет логарифмирование отношения
яркостей. Логарифм спектрального отношения яркостей пропорционален обратным
значениям цветовой температуры.
Измеряемое излучение попадает на фотоэлемент через оптическую систему
прибора и через обтюратор, вращаемый синхронным двигателем. Обтюратор выполнен
в виде диска с отверстиями, закрытыми красными и синими светофильтрами таким
образом, что при вращении диска на фотоэлемент попеременно попадает то красная,
то синяя энергетическая яркость. Импульсы фототока, пропорциональные красной и
синей спектральным энергетическим яркостям, усиливаются и подаются на вход
измерительной системы. Фотоэлемент термостатирован. Все эти устройства
смонтированы в головке прибора. Усиленный ток подается в измерительный блок, в
котором после соответствующих преобразований сигнал поступает в электронную
логарифмирующую систему, позволяющую получать линейную шкалу.
В головке датчика находятся также устройства для ручной и автоматической
регулировки уровня энергетической яркости, индикаторы и органы управления. Для
удаления пыли и дыма из поля зрения при измерении температуры открытых объектов
в бленду, надеваемую на тубус объектива, подается сжатый воздух. Диапазон
измерений температуры составляет 1400-2800°С. Прибор имеет от 3 до 5
поддиапазонов с интервалом 200-400°С. Показания прибора переводятся в градусы
Цельсия с помощью градуировочного графика для данного поддиапазона. Градуировку
прибора проводят по образцовым температурным лампам. Предельная ошибка
измерения цветовой температуры 2000°С равна ±30°С.
В методе бихроматической цветовой пирометрии сигнал для регулирования
определяется разностью двух спектральных энергетических яркостей.
Данный метод регулирования цветовой температуры исключает необходимость
применения какой-либо схемы или логометра, измеряющего отношение яркостей. На
этом принципе работает пирометр РЭД-1, имеющий один фотоэлемент и разделяющий
сигналы, пропорциональные соответствующим спектральным энергетическим яркостям
во времени, с помощью вращающегося диска со светофильтрами.
.3 Методы и средства измерения
уровня
Для ведения технологических процессов большое значение имеет контроль за
уровнем жидкостей и твердых сыпучих материалов в производственных аппаратах.
Кроме того, зная площадь любой емкости, по величине уровня можно определить
количество вещества в ней. Часто по условиям технологического процесса нет
необходимости в измерении уровня по всей высоте аппарата. В таких случаях
применяют узкопредельные, но более точные уровнемеры. Особую группу составляют
уровнемеры, используемые только для сигнализации предельных значений уровня.
Для измерения уровня жидкости применяют поплавковые, буйковые,
гидростатические, ультразвуковые и акустические приборы, для измерения уровня
жидкости и твердых сыпучих материалов - емкостные и радиоизотопные.
Поплавковые уровнемеры
Поплавковым уровнемером называется уровнемер, основанный на измерении
положения поплавка, частично погруженного в жидкость, причем степень погружения
поплавка (осадка) при неизменной плотности жидкости не зависит от
контролируемого уровня. Поплавок перемещается вертикально вместе с уровнем
жидкости, и, следовательно, по его положению может быть определено значение
уровня. В статическом режиме на поплавок действуют: сила тяжести G и
выталкивающие силы жидкости и газовой среды. При перемещении поплавка появляется
также сила сопротивления в подвижных элементах уровнемера.
Если пренебречь силой сопротивления кинематики и выталкивающей силой
газовой фазы, то действующие на поплавок силы связаны уравнением
= Vж ρжg, (4.11)
ρжg, (4.11)
где Vж - объем погруженной части поплавка, ρж - плотность жидкости.
Объем Vж однозначно определяет осадку (глубину погружения)
поплавка. При изменении плотности контролируемой жидкости на Δρж изменяется объем погруженной части на ΔVж, что приводит к изменению осадка, т.е. к появлению
дополнительной погрешности. Выражение для ΔVж можно получить в виде
ΔVж = (δVж / δρ ж)Δρ ж = -Vж (Δρж /ρж) (4.12)
Таким образом, объем погруженной части Vж, а следовательно,
осадка поплавка, является параметром, определяющим дополни-тельную погрешность,
вызванную изменением плотности контролируемой жидкости. Для снижения этой
погрешности целесообразно уменьшить осадку поплавка, что может быть достигнуто
либо увеличением площади поперечного сечения поплавка, либо облегчением
поплавка.
В простейшем случае поплавок соединен с указателем с помощью гибкой
механической связи. Размеры поплавка ограничиваются размерами уровнемера, масса
поплавка не может быть сильно уменьшена из-за необходимости обеспечения
требуемого натяжения гибкого элемента и преодоления сил трения. Сила
сопротивления определяется выбором схемы связи поплавка с измерительной схемой
уровнемера.
Такая конструкция имеет большой диапазон измерения, но не обеспечивает
хорошей герметизации резервуара, поэтому используется только при небольшом
избыточном давлении или разрежении и невысоких температурах контролируемой
среды. Примером такого уровнемера являются уровнемеры типа УДУ. Они
предназначены для измерения уровня нефтепродуктов с температурой (-50...50) °С,
в интервале избыточных давлений (-1,5...3) кПа. Диапазоны измерения 0...12 или
0...20 м, основная погрешность ±4 мм.
При более высоких значениях температуры и давления среды используются
поплавковые уровнемеры с магнитными преобразователями. Примером таких приборов
являются магнитные уровнемеры типа ПМП (рис. 4.5) НПП «СЕНСОР».
По направляющей трубе 7 под влиянием изменения уровня жидкости
перемещается поплавок 6 с постоянным магнитом 5. Внутри трубки 7 по всей ее
длине находятся герконовые реле, которые срабатывают под действием магнитного
поля поплавка. Стопорное кольцо 4 ограничивает перемещение поплавка вверх, а
зонтик 3 защищает его от капель конденсата, который может образовываться на
внутренних стенках резервуара. При диапазоне измерения от 0,5 до 6 м высота
уровня измеряется с дискретностью 5 мм. При определении массы для учета
изменения плотности жидкости в преобразователе производится измерение
температуры. Эти преобразователи могут иметь в качестве выходной величины
изменение сопротивления, токовый сигнал 4...20 мА или цифровой.
Магнитные поплавки входят в состав ультразвуковых уровнемеров.
Буйковые уровнемеры
Буйковыми уровнемерами называются уровнемеры, основанные на законе
Архимеда: зависимости выталкивающей силы, действующей на буек, от уровня
жидкости. Чувствительным элементом таких уровнемеров является массивное тело
(например, цилиндр) - буек, подвешенное вертикально внутри сосуда и частично
погруженное в контролируемую жидкость (рис. 4.6).
Буек закреплен на упругой подвеске с жесткостью с, действующей на буек с
определенным усилием (на рис.4.6 таким элементом является пружина). Увеличивая
уровень на Н от нулевого положения 00, увеличиваем выталкивающую силу, что
вызывает подъем буйка на х, причем при его подъеме увеличивается осадка, т.е. х
< h.
При этом изменяется усилие, с которым подвеска действует на буек, причем
изменение равно изменению выталкивающей силы, вызванной увеличением осадки
буйка на (h - х):
хс = (h - х)ρжgF - (h- х)ρгgF, (4.13)
где с - жесткость подвески; ρж, ρг - плотность жидкости и газа; F- площадь поперечного
сечения буйка.
Отсюда легко получить выражение для статической характеристики буйкового
уровнемера:
= h/(1 + с(ρж - ρг)gF). (4.14)
Таким образом, статическая характеристика буйкового уровнемера линейна,
причем чувствительность его может быть изменена за счет увеличения F или
уменьшения жесткости подвески с.
При большой жесткости подвески буек перемещаться не будет, однако при
изменении уровня изменится усилие, с которым он действует на подвеску. В этом
случае при увеличении уровня на h изменение усилия равно hF(ρж - ρг)g. Такой принцип используется, например, в буйковых
уровнемерах типов Сапфир-22ДУ, УБ-Э, ПИУП (ранее УБ-П). Последние уровнемеры
снабжены преобразователями с силовой компенсацией (УБ-Э) с унифицированным
токовым выходным сигналом, УБ-П и ПИУП с унифицированным пневматическим
выходным сигналом).
Схема уровнемера с электросиловым преобразователем изображена на рис.
4.7.
Буек 1 подвешен на конец рычага 2, на другом конце которого расположен
груз 3, уравновешивающий вес буйка 1 при нулевом уровне (возможен и другой
метод компенсации веса). Разделительная мембрана 4 служит для герметизации
резервуара.
При изменении уровня изменяется усилие, с которым буек действует на
рычаг. Небаланс сил приводит к смещению рычага и сердечника
дифференциально-трансформаторного преобразователя, выполняющего функцию
индикатора рассогласования ИР. Его выходной сигнал поступает на усилитель У,
выходной токовый сигнал которого Iвых поступает на выход прибора и в
устройство обратной связи УОС.
Последнее представляет собой электросиловой преобразователь, который
развивает усилие, устраняющее небаланс сил.
Уровнемеры УБ предназначены для измерения уровня невязких и вязких,
невыпадающих в осадок, не кристаллизующихся сред при давлении - (4... 16) МПа и
температурах от -200 до 200 °С, плотность среды (600...2500) кг/м3.
Верхние пределы измерений выбираются из ряда от 0,02 до 16 м, основная
погрешность ±1; 1,5%. В уровнемерах для химических производств с пневматическим
выходным сигналом типов УБК-1 и ДБУ-1 используется другой тип вывода от буйка -
с помощью торсионной трубки, к выводу которой крепится заслонка
пневмопреобразователя. Уровнемеры ДБУ-1 используются на средах с температурой
5...230 °С при давлении до 2,5 МПа и плотностью 700... 1410 кг/м3.
Верхний предел измерения (0,4...6) м, основная погрешность ±2,5 % [32].
Гидростатические уровнемеры
Основным принципом действия данных уровнемеров является измерение
гидростатического давления, оказываемого жидкостью.
Величина гидростатического давления Рг зависит от высоты
столба жидкости h над измерительным прибором и от плотности этой жидкости ρ.
Измерение гидростатического давления может осуществляться различными
способами, например:
манометром или датчиком давления, которые подключаются к резервуару на
высоте, равной нижнему предельному значению уровня;
дифференциальным манометром, который подключается к резервуару на высоте,
равной нижнему предельному значению уровня, и к газовому пространству над
жидкостью;
измерением давления воздуха, прокачиваемого по трубке, опущенной в
жидкость на фиксированное расстояние, и другими.
На рис. 4.8. приведена схема измерения уровня датчиком избыточного
давления (манометром). Для этих целей может применяться датчик любого типа с
соответствующими пределами измерений.
При измерении уровня гидростатическим способом погрешности измерения
определяются классом точности измерительного прибора, изменениями плотности
жидкости и колебаниями атмосферного давления.
Если резервуар находится под избыточным давлением, то к гидростатическому
давлению жидкости добавляется избыточное давление над ее поверхностью, которое
данной измерительной схемой не учитывается. Поэтому такая схема измерения для
таких случаев не подходит.
В связи с этим, более универсальными являются схемы измерения уровня с
использованием дифференциальных датчиков давления (дифманометров). С помощью
дифференциальных датчиков давления можно также измерять уровень жидкости в
открытых резервуарах, контролировать границу раздела жидкостей.
Схема измерения уровня жидкости в открытом резервуаре, находящемся под
атмосферным давлением.
Плюсовая камера дифманометра ДД через импульсную трубку соединена с
резервуаром в его нижней точке, минусовая камера сообщается с атмосферой.
В такой схеме устраняется погрешность, связанная с колебаниями
атмосферного давления, т.к. результирующий перепад давления на дифманометре
равен:
ΔР = (Рг + Ратм)
- Ратм = Рг. (4.15)
Такая измерительная схема может использоваться тогда, когда дифманометр
расположен на одном уровне с нижней плоскостью резервуара. Если это условие
соблюсти невозможно и дифманометр располагается ниже на высоту h1,
то используют уравнительные сосуды (УС).
Уравнительный сосуд используется для компенсации статического давления,
создаваемого столбом жидкости h1 в импульсной трубке.
Для измерения уровня в резервуарах, находящихся под избыточным давлением
Ризб, применяют измерительную схему, изображенную на рис.4.11.
Избыточное давление Ризб поступает в обе импульсные трубки
дифманометра, поэтому измеряемый перепад давления ΔР можно представить в виде:
ΔР = ρgHmax
- ρgh, (4.16)
где: ρ - плотность жидкости, g = 9,81 м/с2 - ускорение
свободного падения. При h = 0, ΔР = ΔРmax, а при h = Hmax
, ΔР = 0.
То есть из уравнения следует, что шкала измерительного прибора уровнемера
будет обращенной.
Более современным аналогом дифманометров являются датчики
гидростатического давления. Как и у дифманометров, у них имеются две
измерительные камеры. Одна из камер выполнена в виде открытой мембраны, а
вторая - в виде штуцера. Такие датчики всегда можно установить непосредственно
у дна резервуара, поэтому отсутствует необходимость в импульсных трубках, а
значит, и в необходимости компенсации высоты импульсной трубки.
Наиболее распространенные измерительные схемы с использованием
гидростатического датчика давления представлены на рис.4.12.
Схема в) используется для процессов, в которых неизбежно образование
обильного конденсате и его накопление в трубе, соединяющей датчик с объемом над
жидкостью [32].
Емкостные уровнемеры
Емкостными уровнемерами называются уровнемеры, основанные на зависимости
электрической емкости конденсаторного преобразователя, образованного одним или
несколькими стержнями, цилиндрами или пластинами, частично введенными в
жидкость, от ее уровня.
Конструкция конденсаторных преобразователей различна для электропроводных
и неэлектропроводных жидкостей. Электропроводными считаются жидкости, имеющие,
удельное сопротивление ρ < 106 Омм и диэлектрическую проницаемость εж ≥ 7. Различие преобразователей состоит в том,
что один из электродов уровнемеров для электропроводных жидкостей покрыт
изоляционным слоем, электроды преобразователей для неэлектропроводных жидкостей
не изолированы. Электроды могут быть в виде плоских пластин, стержней. В
качестве электрода может использоваться металлическая стенка сосуда. Часто
применяются цилиндрические электроды, обладающие по сравнению с другими формами
электродов хорошей технологичностью, лучшей помехоустойчивостью и
обеспечивающие большую жесткость конструкции.
Конденсаторный преобразователь для неэлектропроводных жидкостей,
состоящий из двух коаксиально расположенных электродов 1 и 2, помещенных в
резервуар 3, в котором производится измерение уровня, изображен на рис. 4.13,
а.
Взаимное расположение электродов зафиксировано проходным изолятором 4.
Электроды образуют цилиндрический конденсатор, часть межэлектродного
пространства которого высотой Н заполнена контролируемой жидкостью, оставшаяся
часть высотой Н - h - ее парами.
В общем виде емкость цилиндрического конденсатора определяется выражением
C = πεε0H / ln(d2/d1), (4.17)
где ε0
= 8,85*10-12 Ф/м (Фарад/м) - диэлектрическая проницаемость вакуума; ε
- относительная
диэлектрическая проницаемость вещества, заполняющего межэлектродное пространство;
Н - высота электродов; d1, d2 - диаметры внутреннего и
наружного электродов.
На основании (4.17) легко записать выражения для емкости С1
части преобразователя, находящейся в жидкости, и для емкости С2
части, находящейся в газовом пространстве:
 ;
;  ; (4.18)
; (4.18)
где εж
и εг - относительные диэлектрические проницаемости
жидкости и газа над ней.
Суммарное выходное сопротивление преобразователя Zпp, кроме
емкостей С1 и С2, определяется также емкостью Си
проходного изолятора и его активным сопротивлением Rи (емкость Си
образуется электродами преобразователя на участке а; сопротивление Rи
обусловлено проводимостью материала изолятора на этом участке), а также
емкостью и проводимостью соединительного кабеля.
Таким образом, электрическая схема преобразователя имеет вид,
изображенный на рис. 4.13, б. Суммарная емкость преобразователя
Спр = С1 + С2 + Си. (4.19)
Емкость Си от значения h не зависит, кроме того, для газов εг ≈ 1, поэтому
 ; (4.20)
; (4.20)
Таким образом, при εж = const емкость Спр однозначно будет
зависеть от измеряемого уровня h. В реальных условиях εж может изменяться (например, при изменении температуры
жидкости, ее состава и т.п.).
Для уменьшения влияния изменения εж на показания уровнемера обычно используется
компенсационный конденсатор (рис. 4.14).
Здесь 1 и 2 - электроды конденсаторного преобразователя, емкость которого
зависит от измеряемого уровня h, и диэлектрической проницаемости εж. Нижняя часть электрода 1 и дополнительный электрод 3
образуют компенсационный конденсатор, который постоянно погружен в жидкость, и,
следовательно, его емкость зависит только от εж. Емкость компенсационного конденсатора используется в
электронной схеме в качестве корректирующего сигнала.
Недостатком такой схемы введения поправки является увеличение по
сравнению со схемой на рис. 4.13 неизмеряемого уровня, обусловленного высотой hк
электродов компенсационного конденсатора. Отрицательное влияние на работу
емкостных уровнемеров оказывает активное сопротивление преобразователя. Оно
слагается из активного сопротивления проходного изолятора (см. Rи на
рис. 4.13, б) и активного сопротивления контролируемой жидкости в
межэлектродном пространстве (обычно значение последнего пренебрежимо мало). Для
уменьшения влияния активного сопротивления преобразователя в схему уровнемера
включается фазовый детектор. В конденсаторных преобразователях для
электропроводных жидкостей один электрод выполняется изолированным. Если
резервуар металлический, то его стенки могут быть использованы в качестве
второго электрода.
Если резервуар неметаллический, то в жидкость устанавливается
металлический неизолированный стержень, выполняющий роль второго электрода. На
рис. 4.15, а изображена схема преобразователя, выполненного в виде стержня
(электрода) 1, покрытого слоем изоляции 2 и погруженного в металлический
резервуар 3.
Если пренебречь диэлектрической проницаемостью газов над жидкостью по
сравнению с диэлектрической проницаемостью изоляции электрода, то электрическую
схему преобразователя можно представить в виде, изображенном на рис. 4.15, б.
Зависящую от уровня емкость преобразователя можно представить как емкость двух
последовательно соединенных конденсаторов С1 и С2.
Параметр С1 - емкость конденсатора, обкладками которого являются
поверхность электрода 1 и поверхность электропроводной жидкости на границе с
изолятором 2. Диэлектриком этого конденсатора является материал изолятора. При
увеличении h увеличивается площадь обкладки - поверхность жидкости, что ведет к
увеличению С1. Параметр С2 - емкость конденсатора, одной
обкладкой которого является поверхность жидкости на границе с изолятором 2
(общая с обкладкой конденсатора С1), второй - поверхность резервуара
3. С увеличением h емкость С2 также растет. Параметр Rж -
активное сопротивление жидкости; Си, Rи - емкость и
активное сопротивление проходного изолятора. Таким образом, полная емкость
преобразователя определяется выражением
Спр = Си + С1С2/(С1
+ С2). (4.21)
Как и в схеме рис. 4.15, наличие активной составляющей в выходном
сопротивлении Zпp преобразователя может привести к появлению
погрешности, во избежание чего в схеме устанавливается фазовый детектор.
В емкостных уровнемерах для измерения электрической емкости
преобразователя используются различные схемы. Наиболее простыми являются
мостовые схемы, примером которых может быть схема электронного индикатора
уровня ЭИУ.
Мост состоит из двух вторичных обмоток I и II трансформатора Тр
(питаемого генератором Г), емкости преобразователя Спр и подстроечного
конденсатора С. Мост уравновешен при нулевом уровне жидкости, при этом сигнал
на входе и выходе усилителя равен нулю. При увеличении уровня емкость Спр
растет, разбаланс моста увеличивается и напряжение на входе усилителя
возрастает. С помощью усилителя этот сигнал усиливается, преобразуется в
унифицированный и измеряется вторичным прибором ВП.
Более сложная измерительная схема используется в уровнемерах типа РУС.
Работа схемы основана на емкостно-импульсном методе измерения уровня,
использующем переходные процессы, протекающие в цепи емкостного
преобразователя, периодически подключаемого к источнику постоянного напряжения.
Измерительный конденсаторный преобразователь 1 и компенсационный конденсатор 2
подключены к входам преобразователей 3, 4 емкости в электрический сигнал.
В преобразователе 3 измерительный конденсатор 1 генератором тактовых
импульсов 7 периодически подключается к постоянному напряжению u1 В
конце рабочего импульса генератор шунтирует измерительный конденсатор и
разряжает его. За время импульса измерительный конденсатор зарядится до
значения напряжения, которое зависит от значения емкости. Выходным сигналом
преобразователя 3 является постоянное напряжение u3 импульсной формы, амплитуда которого определяется емкостью
конденсатора, т.е. значениями контролируемого уровня и диэлектрической
проницаемости среды. Преобразователь 4 имеет аналогичное исполнение, но
питается напряжением u2, пропорциональным выходному току Iвых
(т.е. используется отрицательная обратная связь).
Таким образом, амплитуда выходного импульсного напряжения u4 преобразователя 4 зависит от емкости компенсационного
конденсатора (т.е. диэлектрической проницаемости среды) и значения u2.
Сигналы с преобразователей 3 и 4 вычитаются и разностный сигнал подается на
вход импульсного детектора 5, преобразующего импульсный сигнал в напряжение
постоянного тока u2. Напряжение u2 затем используется в
качестве сигнала обратной связи и усилителем 6 преобразуется в унифицированный
токовый выходной сигнал Iвых. В статическом режиме выходное напряжение u2
и ток Iвых принимают такие значения, при которых u3 ≈
u4. При увеличении уровня и εж = const будет увеличиваться u3, что
приведет к увеличению u2 и Iвых, так как увеличение u4
возможно только за счет увеличения u2 (при εж = const емкость компенсационного конденсатора не
изменяется). Предположим h = const, но увеличилась диэлектрическая
проницаемость εж
при этом u2 и Iвых не должны измениться. Действительно,
при этом увеличится u3, но одновременно увеличится и значение u4
(при u2 = const), так как увеличилась и емкость компенсационного
конденсатора. Верхние пределы уровнемеров РУС выбираются из ряда от 0,4 до 20
м, основная погрешность в зависимости от модификации 0,5; 1,0; 1,5; 2,5 %.
Уровнемеры применяются на диэлектрических или проводящих средах, агрессивных,
взрывоопасных при температурах от -60 до 250 °С при давлениях до 10 МПа. В
емкостных уровнемерах может использоваться резонансная схема измерения емкости.
При этом первичный преобразователь включен в схему колебательного контура,
параметры которого изменяются с изменением контролируемого уровня. При этом
либо измеряется амплитуда напряжения на контуре (при неизменной амплитуде и
частоте питающего напряжения), либо резонансная частота контура. Такие схемы
имеют некоторые модификации уровнемеров типа «РУМБ», сигнализаторы типа СУС.
Емкостные уровнемеры получили широкое распространение особенно в качестве
сигнализаторов из-за дешевизны, простоты обслуживания, удобства монтажа
первичного преобразователя, отсутствия подвижных элементов возможности использования
в широком интервале температур и давлений. Большим достоинством является
нечувствительность к сильным магнитным полям, возможности использования в
широком интервале температур (от криогенных до 500 °С) и давлений. К числу
недостатков следует отнести непригодность для измерения уровня вязких
(динамическая вязкость более 1 Пас), пленкообразующих, кристаллизующихся жидкостей и
содержащих примеси, выпадающие в осадок, высокую чувствительность к изменению
электрических свойств жидкости и изменению емкости кабеля, соединяющего
первичный преобразователь с измерительным прибором. Последний недостаток
устраняется при размещении электронной части в головке преобразователя. В этом
случае емкостной стержневой преобразователь напоминает термопреобразователь.
Так, стержневой емкостной уровнемер типа Меrcap фирмы Siemens может иметь длину
до 5 м при диаметре трубки 24 мм, измеряемая емкость составляет 3,3...3300 pF.
Гибкая конструкция преобразователя может иметь длину до 35 м. Преобразователи
работают при температурах от -200 до 400 °С при давлениях от вакуума до 50 МПа.
При выходном сигнале 4...20 мА преобразователь имеет цифровой сигнал по
HART-протоколу, погрешность измерения составляет ±0,1 %.
Радиоизотопные уровнемеры
Такие уровнемеры применяют для измерения уровня жидкостей и сыпучих
материалов в закрытых емкостях. Их действие основано на поглощении Y -лучей при
прохождении через слой вещества.
В радиоизотопном уровнемере источник и приемник излучения подвешены на
стальных лентах, на которых они могут перемещаться в трубах по всей высоте
бака. Ленты намотаны на барабан, приводимый в движение реверсивным
электродвигателем.
Если измерительная система (источник и приемник Y-лучей) расположена выше уровня измеряемой среды, поглощение
излучения слабое и от приемника по кабелю на блок управления будет приходить
сильный сигнал. По этому сигналу электродвигатель получит команду на спуск
измерительной системы. При снижении ее ниже уровня среды поглощение Y-лучей
резко увеличится, сигнал па выходе приемника уменьшится, и электродвигатель
начнет поднимать измерительную систему.
Таким образом, положение измерительной системы будет отслеживать уровень
в емкости (точнее, она будет находиться в непрерывном колебании около
измеряемого уровня). Это положение в виде угла поворота ролика преобразуется
измерительным устройством в унифицированный сигнал - напряжение постоянного
тока U.
Радиоизотопные уровнемеры и гамма излучателями делятся на две группы:
Следящие уровнемеры - для непрерывного измерения уровня среды в
резервуаре (рис. 4.18). В этом случае, излучатель и приемник радиационного
излучения перемещаются вверх и вниз, по всей высоте емкости, используя либо
специальные ленты либо жесткие металлические рейки с зубцами. Эта конструкция
приводится в действие при помощи реверсивного электромотора. Такой уровнемер
отслеживает границу уровня раздела сред, и в соответствии с ней - выдает
текущий уровень материала в резервуаре.
Сигнализаторы или индикаторы уровня - в свою очередь подразделяются на сигнализаторы
предельного значения и сигнализаторы отклонения от заданного уровня. Отличие
этих сигнализаторов состоит в том, что они считают нормальным: уровень среды до
линии установки датчика (т.е. защита от перелива), либо же нахождение датчика
на границе двух сред (поддержание уровня). Это стационарные приборы,
установленные на одном месте, не имеющие подвижных частей.
Каким бы не был радиоизотопный уровнемер, стационарным или «следящим»,
принцип его действия неизменен и основан на измерении разности интенсивности
гамма-лучей, излученных и поглощенных, при их прохождении через вещества с
различной плотностью, заполняющие резервуар. Что это означает на практике?
Слабое гамма-излучение от источника радиоизотопного излучения (это может
быть либо радиоактивный Кобальт Co60, либо Цезий 137), проникая
через стенки резервуара и его внутреннюю полость, улавливается и преобразуется
приемником-детектором, в качестве которого выступает обычный счетчик Гейгера. В
счётчике Гейгера, при воздействии гамма-излучения, происходит ионизация
заполняющего его газа. Благодаря тому, что к электродам счетчика приложен
высокий электрический потенциал, возникает импульсный ток, частота импульсов
которого, прямо пропорциональна интенсивности потока гамма-излучения.
В случае заполнения резервуара сыпучей или жидкой средой, часть
гамма-излучения поглощается, вследствие чего, на приемном устройстве уровнемера
наблюдается снижение уровня излучения. Таким образом, частота импульсов от
счетчика Гейгера изменяется. Контроллер, по этим сигналам, распознает порог
изменения интенсивности гамма-излучения, преобразует его в постоянный ток,
пропорциональный частоте импульсов и переключает контакты встроенного реле
(либо подаёт сигнал на пульт диспетчера или индикаторы).
Таким образом, радиационное излучение идет от излучателя к приемнику,
которые располагаются на противоположных стенках емкости или резервуара. Гамма
лучи на своем пути проходят либо через воздух, в случае, когда уровень среды не
достигнет отметки, на которой установлен уровнемер, либо непосредственно через
продукт, уровень которого и контролируется. Воздушная среда не способна
обеспечить сильное затухание радиоактивного сигнала. В случае же, когда уровень
измеряемой среды окажется выше отметки, на которой установлены излучатель и приемное
устройство, то радиоактивное излучение будет проходить сквозь толщу этой среды,
что отразится на его интенсивности , поскольку, плотная среда имеет свойство
поглощать радиацию намного сильнее, нежели воздушная среда.
Радиоизотопные уровнемеры уже давно освоены предприятиями тяжелой
промышленности. Они надежны, поскольку ломаться в таких уровнемерах и
сигнализаторах, абсолютно нечему, и имеют высокую точность определения уровня.
Однако, они имеют ряд негативных моментов, которые и ограничивают их повсеместное
применение. Во-первых, это необходимость обеспечения дополнительной
безопасности персонала, работающего с этими радиоактивными приборами.
Во-вторых, невозможность использования таких датчиков для измерения уровня
пищевых продуктов. Они подходят лишь для промышленного применения. И в-третьих,
стоимость радиационной аппаратуры вообще, и радиоизотопных уровнемеров, в
частности, может быть в несколько раз выше, чем уровнемеров других типов.
Однако, как уже говорилось ранее, существуют ситуации, когда без
радиоизотопного уровнемера не обойтись. Например, как, при измерении уровня
расплавленного металла в печах, или в процессе непрерывной отливки (для этих
целей прекрасно подойдет прибор технологического контроля уровня жидкого
металла «ПТКУ»). Поэтому, радиоизотопные уровнемеры имеют полное право на
существование и активную эксплуатацию. Просто подбирать такой уровнемер можно
не подо все технологические процессы.
Ультразвуковые и акустические уровнемеры
По принципу действия акустические уровнемеры можно подразделить на
• локационные,
• поглощения и
• резонансные.
В локационных ультразвуковых уровнемерах используется эффект отражения
ультразвуковых колебаний от границы раздела жидкость - газ, в связи с чем они
получили название ультразвуковых. Положение уровня определяется по времени
прохождения ультразвуковых колебаний от источника до приемника после отражения
их от поверхности раздела.
В уровнемерах поглощения положение уровня определяется по ослаблению
интенсивности ультразвука при прохождении через слои жидкости и газа.
В резонансных уровнемерах измерение уровня производится посредством
измерения частоты собственных колебаний столба газа над уровнем жидкости,
которая зависит от высоты уровня.
Наибольшее распространение получили локационные уровнемеры. Локация
уровня может производиться либо через газовую среду над жидкостью, либо снизу
через слой жидкости. Недостатком первого типа уровнемеров являются погрешность
от зависимости скорости звука от давления и температуры газа и сильное
поглощение ультразвука газом, что требует большей мощности источника, чем при
локации через жидкость. Однако на показания таких уровнемеров не сказываются
изменения характеристик жидкости, поэтому они могут быть использованы для
измерения уровня жидкостей неоднородных, содержащих пузырьки газа или
кристаллизующихся. Уровнемеры с локацией через жидкость могут быть использованы
для сред под высоким давлением, для них требуется небольшая мощность источника,
однако они чувствительны к включениям в жидкость, например к пузырькам газа при
вскипании. Поэтому эти уровнемеры применимы только для однородных жидкостей.
Кроме того, они также чувствительны к изменению температуры и давления среды
из-за зависимости от них скорости распространения ультразвука.
Источником и одновременно приемником отраженных ультразвуковых колебаний
является пьезоэлемент, заключенный в акустический преобразователь 1. Локация
осуществляется ультразвуковыми импульсами, которые возбуждаются пьезоэлементом
в результате подачи на него электрических импульсов от генератора 2.
Одновременно генератор включает схему измерения времени 4. Отраженный
ультразвуковой импульс возвращается на пьезоэлемент через время t,
соответствующее контролируемому уровню в соответствии с выражением t = 2(Н -
h)/c, где с - скорость ультразвука в газе.
Пьезоэлемент преобразует отраженный ультразвуковой импульс в
электрический сигнал, который усиливается усилителем 3 и подается на схему
измерения времени 4. Преобразователь 5 преобразует значение времени в
унифицированный выходной сигнал 0...5 мА, измеряемый вторичным прибором 6. Для
уменьшения влияния изменения температуры газа имеется блок температурной
компенсации 7, включающий в себя термопреобразователь сопротивления,
расположенный внутри акустического преобразователя.
Примером использования акустического метода является серийно выпускаемый
преобразователь уровня ЭХО-5, предназначенный для измерения уровня жидкостей (в
том числе агрессивных), а также сыпучих и кусковых материалов при температуре
от -50 до 170 °С и при давлении до 4 МПа. Верхние пределы измерения уровнемера:
0,4...30 м, основная погрешность преобразователя в зависимости от модификации
равна ±0,5; ±1,0; ± 1,5; ±2,5 %.
Ультразвуковой метод характерен очень малым подводом теплоты в
контролируемую среду, поэтому может быть использован в криогенной технике.
Однако метод применим только на жидкостях со спокойной поверхностью, т.е.
исключаются кипящие жидкости и криостаты с загруженным внутренним объемом.
Еще одним примером может послужить фирма Siemens, которая производит
более десяти типов ультразвуковых уровнемеров, предназначенных для различных
отраслей промышленности, сельского и коммунального хозяйства. В некоторых типах
в одном приборе объединены источники (приемники) излучения (сенсоры) с
электронным преобразователем, в других они разнесены. Совмещенный вариант
реализован в компактных приборах типа «The Probe», предназначенных для
измерения уровня в диапазоне от 0,25 до 8 м. Сенсор работает на частоте 43 кГц,
выходной сигнал уровнемера составляет 4...20 мА, погрешность не превышает ±0,25
%, благодаря введению температурной компенсации. Измерительный преобразователь
LU 10 может работать с десятью сенсорами, которые могут отстоять от
измерительного блока на расстояние до 365 м. При диапазоне измерения до 60 м и
наличии температурного зонда погрешность измерения уровня составляет ±0,1;
±0,25 %. Выходной сигнал 4...20 мА может сочетаться с цифровым наиболее
распространенных протоколов.
На явлении отражения ультразвука построена схема уровнемера типа РУ-ПТ1,
который является более поздним вариантом РУМБ- БК-М (з-д «Теплоприбор» г.
Рязань). Принцип действия уровнемера основан на измерении времени
распространения фронта ультразвуковых колебаний в металлическом стержне от
поплавка до нулевой отметки на нижнем конце первичного преобразователя.
Ультразвуковой уровнемер состоит из преобразователей: первичного ПП,
промежуточного ПР и передающего ПЕР. В состав первичного преобразователя входит
источник ультразвуковых колебаний 7, погружаемый в контролируемую среду
металлический стержень 2 и перемещающийся вдоль него поплавок 3. Источником
формируется ультразвуковой импульс и снимаются со стержня сигналы, отраженные
от поплавка и участка стержня, соответствующего нулевому уровню. Промежуточный
преобразователь усиливает их и в виде двух импульсов напряжения U1,
и U2 подает на передающий преобразователь. По моменту начала
импульса, задаваемому генератором Г, и времени поступления импульсов
вычисляется время прохождения импульса в стержне от поплавка до нулевой отметки
(т.е. в пределах контролируемого уровня). Для учета температурного удлинения
стержня по импульсу U2 вычисляется время t2 прохождения
импульса по всему стержню. Значение контролируемого уровня определяется по
формуле
= Ho(t1/t2),
где Но - базовая длина стержня при температуре 20 ± 5 °С.
Верхний предел измерения высоты уровня составляет 0,4... 12 м, выходные
сигналы: токовый 0...5 (4...20) мА, цифровая индикация уровня в м, цифровой
сигнал по интерфейсу RS-232C, RS-485, сигнализация двух предельных отклонений
уровня. Уровнемер предназначен для широкого класса сред (в том числе
нефтепродуктов и сжиженных газов) при температурах -40... 120 °С и давлении до
2,5 МПа, основная погрешность составляет ±4 мм.
К ультразвуковым относятся уровнемеры типа ДУУ2, ДУУ4 ЗАО «Альбатрос», в
которых используется магнитострикционный эффект. Последний состоит в деформации
кристаллического тела под воздействием магнитного поля. Преобразователь этих
уровнемеров содержит диэлектрическую направляющую трубку, внутри которой
находится стальная проволока с намотанной по всей длине катушкой. По наружной
поверхности трубки, покрытой фторопластом, скользит магнитный поплавок,
плавающий на поверхности жидкости или границе раздела сред. В месте размещения
поплавка происходят локальные изменения в кристаллической решетке проволоки.
При подаче в катушку импульса тока создается импульсное магнитное поле,
вызывающее импульсную деформацию проволоки. При достижении последней поплавка
возникает отраженный импульс продольной деформации, воспринимаемой
пьезодатчиком. Положение уровня определяется по интервалу времени от момента
формирования импульса тока до приема импульса упругой деформации. На
направляющей трубке может размещаться до четырех магнитных поплавков,
измеряющих, например, верхний уровень и три границы раздела сред. В гибкой модификации
преобразователя катушка с проволокой покрыта фторопластовой изоляцией. Для
натяжения проволоки к ее концу крепится груз или опорный магнит. На конце
преобразователя размещаются датчики давления и температуры.
Максимальная измеряемая высота уровня составляет 25 м, избыточное
давления не должно превышать 2 МПа, а температура 120 °С при плотности среды от
500 до 1500 кг/м3. Основная погрешность в зависимости от исполнения составляет
±1; ±3; ±5 мм. Число выходных сигналов 4...20 мА достигает шести в зависимости
от числа измеряемых величин [33].
4.4 Методы и средства измерения давления
Измерение давления необходимо практически в любой области науки и техники
как при изучении происходящих в природе физических процессов, так и для
нормального функционирования технических устройств и технологических процессов,
созданных человеком. Давление определяет состояние веществ в природе (твердое
тело, жидкость, газ).
Чрезвычайно многообразно применение давления в науке, технике и
производстве. Энергетические возможности тепло- и гидроэлектростанций и атомных
электростанций определяются давлением пара или воды на лопасти турбин, под
действием давления по каналам и трубопроводам на тысячи километров
транспортируется вода, нефть и газ. Давление приводит в движение автомобили и
самолеты, геодезические ракеты и космические корабли, открывает и закрывает
двери лифта, вагонов метропоездов, троллейбусов и автобусов, подает воду и газ
в квартиры наших домов.
Посредством давления осуществляется работа разнообразных станков, механизмов
и установок в различных отраслях производства.
По давлению контролируют состояние рабочих сред в различных
технологических процессах нефтехимической промышленности, при производстве
искусственных волокон и пр. Во многих отраслях науки при проведении физических,
термодинамических и метрологических исследований (определение концентрации
газов в твердых веществах, констант уравнений состояния различных веществ,
эталонные температурные и линейные измерения) также требуется измерять давление
[3-5].
Давление характеризует напряженное состояние жидкостей и газов в условиях
всестороннего сжатия и определяется частным от деления нормальной к поверхности
силы на площадь этой поверхности
p=N/F , (4.22)
где р - давление; N - нормальная сила, действующая на поверхность; F -
площадь поверхности.
При этом принимается, что нормальная сила равномерно распределена по
поверхности, а в жидкости или газе отсутствуют касательные напряжения. Так как
действующая сила всегда перпендикулярна к поверхности вне зависимости от ее
расположения, то давление является скалярной величиной [2].
Понятие давления как физической величины во всех его проявлениях едино.
Вместе с тем, во многих естественных природных явлениях и в различных
технических устройствах и процессах определяющим является не само давление, а
его значение относительно другого. Например, под действием разности двух
давлений по магистральным трубопроводам транспортируются нефть и газ из Сибири.
При сравнении значений двух давлений одно из них принимается за начало
отсчета их разности. По этому признаку различают следующие виды давлений.
Абсолютное давление - давление, значение которого при измерении
отсчитывается от давления, равного нулю. Абсолютное давление воздушной оболочки
Земли на ее поверхность называется атмосферным давлением.
С учетом специфики каждого из видов давления при измерениях применяются
специальные средства измерений - манометры и измерительные преобразователи
давления.
Манометр - измерительный прибор или измерительная установка для измерения
давления или разности давлений с непосредственным отсчетом их значения.
Измерительный преобразователь давления (датчик) - первичный
преобразователь, выходной сигнал которого функционально связан с измеряемым
давлением или разностью давлений. Выходной сигнал датчика вторичными приборами
преобразуется в показания значения давления или поступает в различные системы
управления и регулирования [3-5].
В соответствии с видами измеряемого давления применяют следующие виды
средств измерения давления:
· манометр абсолютного давления - манометр для измерения абсолютного
давления;
· барометр - манометр для измерения атмосферного давления;
манометр избыточного давления - манометр для измерения положительного
избыточного давления;
· вакуумметр - манометр для измерения отрицательного
избыточного давления. Вакуумметрами часто называют манометры, предназначенные
для измерения низких абсолютных давлений, существенно меньших, чем атмосферное
давление (в вакуумной технике);
· мановакуумметр - манометр, для измерения как положительного,
так и отрицательного избыточного давления;
· дифференциальный манометр (дифманометр) - манометр для
измерения разности двух давлений, каждое из которых отличается от атмосферного
давления;
· микроманометр - дифференциальный манометр для измерения малых
разностей двух давлений, каждое из которых существенно больше их разности.
Единицы измерения давления
Когерентной единицей Международной системы единиц (СИ) является паскаль
(Па). По определению единица давления паскаль представляет собой отношение
единицы силы Ньютона к единице площади квадратному метру:
Па= 1 Н/м2 = 1 кг/(м•с2)
Наиболее близка к СИ единица давления бар (бар), размер, которой очень
удобен для практики (1 бар = 1•105 Па).
В применяемых до настоящего времени жидкостных манометрах мерой измеряемого
давления является высота столба жидкости. Поэтому естественно применение единиц
давления, определяемых высотой столба жидкости, т. е. основанных на единицах
длины. В странах с метрическими системами мер получили распространение единицы
давления миллиметр и метр водяного столба (ммвод. ст. и мвод.
ст.) и миллиметр ртутного столба (мм рт. ст.).
Размеры этих единиц давления пересчитываются в единицы СИ на основании
формулы
p=H g, (4.23)
g, (4.23)
где Н - высота столба жидкости, м, ρ - плотность жидкости, кг/м3,
g -ускорение свободного падения, м/с2.
Методы измерения давления во многом предопределяют как принципы действия,
так и конструктивные особенности средств измерений. В этой связи в первую
очередь следует остановиться на наиболее общих методологических вопросах
техники измерения давления.
Давление, исходя из самых общих позиций, может быть определено как путем
его непосредственного измерения, так и посредством измерения другой физической
величины, функционально связанной с измеряемым давлением.
В первом случае измеряемое давление воздействует непосредственно на
чувствительный элемент прибора, который передает информацию о значении давления
последующим звеньям измерительной цепи, преобразующим ее в требуемую форму.
Этот метод определения давления является методом прямых измерений, и получил
наибольшее распространение в технике измерения давления. На нем основаны
принципы действия большинства манометров и измерительных преобразователей
давления.
Во втором случае непосредственно измеряются другие физические величины
или параметры, характеризующие физические свойства измеряемой среды, значения
которых закономерно связаны с давлением (температура кипения жидкости, скорость
распространения ультразвука, теплопроводность газа и т. д.). Этот метод
является методом косвенных измерений давления и применяется, как правило, в тех
случаях, когда прямой метод по тем или иным причинам неприменим, например, при
измерении сверхнизкого давления (вакуумная техника) или при измерении высоких и
сверхвысоких давлений [34].
Давление является производной физической величиной, определяемой тремя
основными физическими величинами - массой, длиной и временем. Конкретная
реализация значения давления зависит от способа воспроизведения единицы
давления. При измерении по формуле (4.22) давление определяется силой и
площадью, а по формуле (4.23) - длиной (высотой), плотностью и ускорением.
Методы определения давления, основанные на измерении указанных величин,
являются абсолютными (фундаментальными) методами и применяются при
воспроизведении единицы давления эталонами грузопоршневого и жидкостного типа,
а также позволяют, при необходимости, производить аттестацию образцовых средств
измерений.
Относительный метод измерений, в отличие от абсолютного, основан на
предварительном исследовании зависимости от давления физических свойств и
параметров чувствительных элементов средств измерения давления при методах
прямых, измерений или других физических величин и свойств измеряемой среды -
при методах косвенных измерений. Например, деформационные манометры перед их
применением для измерения давления должны быть сначала отградуированы по
образцовым средствам измерений соответствующей точности.
Помимо классификации по основным методам измерений и видам давления,
средства измерений давления классифицируют по принципу действия,
функциональному назначению, диапазону и точности измерений.
Наиболее существенный классификационный признак - принцип действия
средства измерения давления, в соответствии с ним и построено дальнейшее
изложение.
Современные средства измерений давления представляют собой измерительные
системы, звенья которых имеют различное функциональное назначение. Важнейшим
звеном любого средства измерения давления является его чувствительный элемент
(ЧЭ), который воспринимает измеряемое давление и преобразует его в первичный
сигнал, поступающий в измерительную цепь прибора. С помощью промежуточных
преобразователей сигнал от ЧЭ преобразуется в показания манометра или
регистрируется им, а в измерительных преобразователях (ИПД) - в унифицированный
выходной сигнал, поступающий в системы измерения, контроля, регулирования и
управления. При этом промежуточные преобразователи и вторичные приборы во
многих случаях унифицированы и могут применяться в сочетании с ЧЭ различных
типов. Поэтому принципиальные особенности манометров и ИПД зависят, в первую
очередь, от типа ЧЭ [34].
По принципу действия ЧЭ средства измерения давления можно разделить на
следующие основные группы:
. Средства измерения давления, основанные на прямых абсолютных методах:
поршневые манометры и ИПД, в том числе и грузопоршневые манометры, манометры с
нецилиндрическим неуплотненным поршнем, колокольные, кольцевые и жидкостные
манометры. В первых трех манометрах метод измерений реализуется уравнением
(4.22), основанным на определении величины давления по отношению силы к
площади; в жидкостных манометрах - уравнением (4.23), основанным на
уравновешивании давления столбом жидкости.
. Средства измерения давления, основанные на прямых относительных
методах: деформационные манометры и ИПД, в том числе и с силовой компенсацией;
полупроводниковые манометры и ИПД; манометры других типов, основанные на
изменении физических свойств ЧЭ под действием давления.
. Средства измерения давления, основанные на методах косвенных измерений:
установки и приборы для определения давления по результатам измерения других
физических величин; установки и приборы для определения давления по результатам
измерения параметров физических свойств измеряемой среды (термопарные и
ионизационные вакуумметры, ультразвуковые манометры, вязкостные вакуумметры и
др.).
Следует отметить, что абсолютные методы измерений, заложенные в поршневых
и жидкостных манометрах, во многих случаях на практике не реализуются.
Например, жидкостные манометры, исключая первичные эталоны, градуируются и
поверяются не абсолютным, а относительным методом, путем их сличения с
образцовыми средствами измерений соответствующей точности.
4.4.1 Методы прямых измерений давления
Жидкостные манометры
Вопросы водоснабжения для человечества всегда были очень важными, а
особую актуальность приобрели с развитием городов и появлением в них различного
вида производств. При этом все более актуальной становилась проблема измерения
давления воды, т. е. напора, необходимого не только для обеспечения подачи воды
через систему водоснабжения, но и для приведения в действие различных
механизмов. Честь первооткрывателя принадлежит крупнейшему итальянскому
художнику и ученому Леонардо да Винчи (1452-1519 гг.), который впервые применил
пьезометрическую трубку для измерения давления воды в трубопроводах.
Дальнейшее развитие науки и техники привело к появлению большого
количества жидкостных манометров различных типов, применяемых до настоящего
времени во многих отраслях: метеорологии, авиационной и электровакуумной
технике, геодезии и геологоразведке, физике и метрологии и пр. Однако, в силу
ряда специфических особенностей принципа действия жидкостных манометров, их
удельный вес по сравнению с манометрами других типов относительно невелик и,
вероятно, будет уменьшаться и в дальнейшем. Тем не менее, при измерениях особо
высокой точности в области давлений, близких к атмосферному давлению, они пока
незаменимы. Не потеряли своего значения жидкостные манометры и в ряде других
областей (микроманометрии, барометрии, метеорологии, при физико-технических
исследованиях).
Основные типы жидкостных манометров и принципы их действия
Принцип действия жидкостных манометров можно проиллюстрировать на примере
U-образного жидкостного манометра, состоящего из двух соединенных между собой
вертикальных трубок 1 и 2, наполовину заполненных жидкостью.
В соответствии с законами гидростатики при равенстве давлений р1 и
р2 свободные поверхности жидкости (мениски) в обеих трубках
установятся на уровне I-I. Если одно из давлений превышает другое (р1
>р2), то разность давлений вызовет опускание уровня жидкости в
трубке 1 и, соответственно, подъем в трубке 2, вплоть до достижения состояния
равновесия. При этом на уровне II-II уравнение равновесия примет вид:
Δр=р1 -р2 = Н -
р g , (4.24)
т. е. разность давлений определяется давлением столба жидкости высотой Н
с плотностью р.
Уравнение (4.23) с точки зрения измерения давления является
фундаментальным, так как давление, в конечном итоге, определяется основными
физическими величинами - массой, длиной и временем. Это уравнение справедливо
для всех без исключения типов жидкостных манометров. Отсюда следует
определение, что жидкостный манометр - манометр, в котором измеряемое давление
уравновешивается давлением столба жидкости, образующегося под действием этого
давления. Важно подчеркнуть, что мерой давления в жидкостных манометрах
является высота столба жидкости. Именно это обстоятельство привело к появлению
единиц измерений давления мм вод. ст., мм рт. ст. и других которые естественным
образом вытекают из принципа действия жидкостных манометров.
Чашечный жидкостный манометр (рис. 4.23, б) состоит из соединенных между
собой чашки 1 и вертикальной трубки 2, причем площадь поперечного сечения чашки
существенно больше, чем трубки. Поэтому под воздействием разности давлений Δр изменение уровня жидкости в чашке
гораздо меньше, чем подъем уровня жидкости в трубке: Н1 = Н2
• f/F, где Н1 - изменение уровня жидкости в чашке.; Н2 -
изменение уровня жидкости в трубке; f - площадь сечения трубки; F - площадь
сечения чашки.
Отсюда высота столба жидкости, уравновешивающей измеряемое давление
Н = Н1 + Н2 = Н2 (1 + f/F), (4.25)
а измеряемая разность давлений
р1-p2=Н2•g(1+f/ F), (4.26)
Поэтому при известном коэффициенте k = 1 + f/F разность давлений может
быть определена по изменению уровня жидкости в одной трубке, что упрощает
процесс измерений.
Двухчашечный манометр (рис. 4.23, в) состоит из двух соединенных при
помощи гибкого шланга чашек 1 и 2, одна из которых жестко закреплена, а вторая
может перемещаться в вертикальном направлении. При равенстве давлений pl
и р2 чашки, а следовательно, свободные поверхности жидкости
находятся на одном уровне I-I. Если р1 > р2, то чашка
2 поднимается вплоть до достижения равновесия в соответствии с уравнением
(4.24).
Единство принципа действия жидкостных манометров всех типов обусловливает
их универсальность с точки зрения возможности измерения давления любого вида -
абсолютного и избыточного и разности давлений.
К важной метрологической характеристике средств измерения давления относится
чувствительность измерительной системы, которая во многом определяет точность
отсчета при измерениях и инерционность. Для манометрических приборов под
чувствительностью понимается отношение изменения показаний прибора к вызвавшему
его изменению давления ( =ΔН/Δр).
=ΔН/Δр).
Диапазоны измерений жидкостных манометров в соответствии с (4.23)
определяются высотой столба жидкости, т. е. размерами манометра и плотностью
жидкости. Наиболее тяжелой жидкостью в настоящее время является ртуть,
плотность, которой  = 1,35951 • 104 кг/м3. Столб ртути
высотой 1 м развивает давление около 136 кПа, т. е. давление, немного
превышающее атмосферное давление. Поэтому при измерении давлений порядка 1 МПа
размеры манометра по высоте соизмеримы с высотой трехэтажного дома, что
представляет существенные эксплуатационные неудобства, не говоря о чрезмерной
громоздкости конструкции. Тем не менее, попытки создания сверхвысоких ртутных
манометров предпринимались. Мировой рекорд был установлен в Париже, где на базе
конструкций знаменитой Эйфелевой башни был смонтирован манометр высотой
ртутного столба около 250 м, что соответствует 34 МПа. В настоящее время этот
манометр разобран в связи с его бесперспективностью.
= 1,35951 • 104 кг/м3. Столб ртути
высотой 1 м развивает давление около 136 кПа, т. е. давление, немного
превышающее атмосферное давление. Поэтому при измерении давлений порядка 1 МПа
размеры манометра по высоте соизмеримы с высотой трехэтажного дома, что
представляет существенные эксплуатационные неудобства, не говоря о чрезмерной
громоздкости конструкции. Тем не менее, попытки создания сверхвысоких ртутных
манометров предпринимались. Мировой рекорд был установлен в Париже, где на базе
конструкций знаменитой Эйфелевой башни был смонтирован манометр высотой
ртутного столба около 250 м, что соответствует 34 МПа. В настоящее время этот
манометр разобран в связи с его бесперспективностью.
Жидкостно-поршневые манометры
Очень часто к жидкостным манометрам относят приборы, измерительная
система которых хотя и содержит в качестве одного из элементов жидкость, но по
принципу действия в корне отличается от жидкостных манометров. К таким приборам
относится дифференциальный манометр типа „кольцевые весы" (рис. 4.24),
состоящий из тороидального корпуса 1, внутренняя полость которого в верхней
части разделена перегородкой 2, а нижняя часть до половины заполнена жидкостью
4. Таким образом, корпус имеет две измерительные камеры А и Б, в которые через
гибкие шланги подаются измеряемые давления pl и р2.
Корпус может поворачиваться относительно опоры 3, расположенной в его
геометрическом центре. К нижней части корпуса прикреплен противовес 5.
При равенстве давлений в камерах А и Б корпус прибора располагается в
соответствии с рис. 4.24, а. Если одно из давлений больше другого, например, р1
> р2 то под действием разности давлений Δр = p1 - р2,
воздействующей на перегородку, корпус повернется на определенный угол α,
а уровни жидкости внутри
корпуса займут положения, соответствующие рис. 4.24, б. При этом уравнения
равновесия измерительной системы принимают вид
 , (4.27)
, (4.27)
где F - площадь перегородки (внутренняя площадь поперечного сечения
тороида); R1 - средний радиус тороида; R2 - расстояние
от оси вращения до центра тяжести противовеса; т - масса противовеса; g -
ускорение свободного падения; α - угол поворота корпуса.
Таким образом, давление определяется массой противовеса, геометрическими
параметрами прибора и углом поворота корпуса, а роль заполняющей измерительную
систему жидкости сводится к созданию жидкостного затвора между камерами А и Б.
Поэтому по виду первичного преобразования - давления в силу, действующую на
перегородку, - прибор аналогичен поршневым манометрам.
Еще в большей мере сказанное относится к колокольным манометрам,
применяемым в качестве образцовых и эталонных приборов. Основные элементы
измерительной системы манометра (рис. 4.25): наполовину заполненный водой сосуд
5, цилиндрический колокол 3, подвеска 2 с чашкой 6 для наложения грузов 7,
рычаг 1 весового компаратора с указателем положения равновесия 8 и подвески 9 с
тарировочным грузом 10. Измеряемое давление подводится под колокол трубкой 4.
Измерительной камерой прибора является внутренняя полость колокола,
ограниченная дном и внутренней поверхностью цилиндрической части колокола и
свободной поверхностью жидкости в его нижней части. При проведении измерений
камера предварительно сообщается с атмосферным давлением и вес частично
погруженного в жидкость колокола уравновешивается тарировочным грузом 10.
Тогда при подаче в камеру измеряемого давления для сохранения положения
равновесия на чашку 6 необходимо наложить грузы 7, вес которых и является мерой
измеряемого давления. При этом давление в камере будет уравновешиваться
противодавлением столба жидкости в кольцевом зазоре между наружной поверхностью
колокола и внутренней поверхностью сосуда 5. Таким образом, роль жидкости так
же, как и в вышеописанном приборе, ограничивается созданием жидкостного затвора
для удержания давления в измерительной камере, так как составляющими сил
давления на боковую поверхность колокола в вертикальном направлении при условии
соблюдения технологии его изготовления можно пренебречь.
Поршневые манометры
Поршневые манометры появились позже жидкостных. Впервые поршневой
манометр был применен для измерения давления в 1833 г. Парротом и Ленцем
(Российская Академия наук) при изучении сжимаемости воздуха и других свойств
газов, причем значение давления для того времени было очень большим (10 МПа).
Дальнейшее развитие поршневой манометрии шло, в основном, в сторону увеличения
точности и верхних пределов измерений, а, начиная с тридцатых годов текущего
столетия поршневые манометры стали вытеснять жидкостные и при точных измерениях
давлений, близких к атмосферному давлению.
Большой вклад в развитие поршневой манометрии внесли проф. М.К.
Жоховский, который впервые разработал целостную теорию приборов с неуплотненным
поршнем, П.В. Индрик, В.Н. Граменицкий и многие другие их последователи.
В настоящее время в нашей стране и за рубежом поршневые манометры играют
ведущую роль при поверке и испытаниях манометрических приборов в широком
диапазоне давлений от 1 кПа до десятков тысяч МПа и находят все большее применение
в качестве национальных государственных эталонов давления.
Принцип действия, основы теории и типы поршневых манометров
На рис.4.26 изображен простейший поршневой манометр, который состоит из
цилиндрического поршня 1, притертого к цилиндру 2 с минимально возможным
зазором. Если на нижний торец поршня действует измеряемое давление р, то для
его уравновешивания к поршню должна быть приложена сила Р.
Уравнение равновесия с учетом силы трения на боковую поверхность поршня,
возникшей при протекании жидкости или газа через зазор между поршнем и
цилиндром под действием измеряемого давления, имеет вид
рF = P-T, (4.28)
где F - геометрическая площадь поперечного сечения поршня; Т - сила
жидкостного трения на боковую поверхность поршня.
Наиболее часто измеряемое давление уравновешивают весом грузов, что явно
предпочтительно с точки зрения достижения высокой точности измерений, хотя и
представляет известные неудобства в эксплуатации.
Благодаря высокой стабильности эффективной площади, которая определяется
в основном геометрическими размерами пары поршень - цилиндр, а также
возможности учета внешних влияний расчетными методами, поршневые манометры
являются идеальными преобразователями давления в силу.
Наиболее существенное достоинство поршневых манометров состоит в том, что
они непосредственно воспроизводят давление по определению: давление равно силе,
деленной на площадь поршня. Этот метод так же, как и метод уравновешивания
давления столбом жидкости, является фундаментальным, т. е. измерение давления в
конечном итоге сводится к измерению массы, длины и времени. Вышеизложенное
позволяет сформулировать следующее определение.
Таким образом, поршневой манометр - это манометр, в котором действующее
на поршень измеряемое давление преобразуется в силу и определяется по значению
силы, необходимой для ее уравновешивания. В наиболее распространенных поршневых
манометрах давление уравновешивается весом грузов. Такие манометры называются
грузопоршневыми.
Одно из обязательных условий, обеспечивающих возможность выполнения измерения
- сохранение постоянства измеряемого давления при его измерении. В
жидкостно-поршневых манометрах это достигается уравновешиванием измеряемого
давления гидростатическим давлением столба жидкости. Например, в колокольном
манометре столб образуется в кольцевом пространстве между боковыми
поверхностями колокола и сосуда, в который залита разделительная жидкость
(гидростатический затвор). В отличие от этого в поршневых манометрах
постоянство давления в измерительной камере поддерживается благодаря гидравлическому
сопротивлению протекания жидкости через зазор между поршнем и цилиндром
(гидродинамический затвор). При этом ввиду малости зазора (1-2 мкм)
гидравлическое сопротивление позволяет поддерживать постоянство давления с
допускаемыми отклонениями. Не обеспечивая полную герметичность,
гидродинамический затвор обладает очень важным преимуществом - измеряемое
давление практически не влияет на размеры прибора, в то время как во всех
жидкостных манометрах высота столба жидкости, необходимая для уравновешивания,
прямо пропорциональна измеряемому давлению.
Измерительные системы поршневых манометров могут быть классифицированы по
различным признакам: форме и конструкции поршневых пар, уравновешенности
собственного веса поршня и способам его уравновешивания, видам измеряемой
среды, способам уравновешивания измеряемого давления, назначению поршневого
манометра, виду измеряемого давления и пр.
Основные конструктивные формы цилиндрических поршневых пар,
представленные на рис. 4.27, позволяют осуществить преобразование измеряемого
давления в силу или в давление другого назначения.
Различные формы поршневых пар при их применении в поршневых манометрах
для измерения различных видов давления имеют свои преимущества и недостатки.
При измерении избыточного давления наиболее предпочтительны
одноступенчатые поршневые пары (рис. 4.27, а), которые обеспечивают
максимальную конструктивную простоту манометров и технологичность их
изготовления.
При этом масса грузов, которые, как правило, применяются для
уравновешивания измеряемого давления, при измерении избыточного давления (рабс
> ратм) прилагается непосредственно к верхнему торцу 2 поршня; а
при измерении отрицательного избыточного давления (рабс < ратм)
к нижнему торцу 1 поршня. На этом принципе основаны образцовые и эталонные манометры
с верхними диапазонами измерений от 40 кПа до 250 МПа, а в некоторых случаях до
600 МПа.
При измерении абсолютного давления и разности применение одноступенчатой
поршневой пары приводит к существенному усложнению конструкции поршневого
манометра и методики выполнения измерений. Так, при измерении абсолютного
давления пространство над верхним торцом 2 поршня должно быть вакуумировано,
что приводит к необходимости герметизации верхней части прибора, а это
существенно усложняет процесс наложения уравновешивающих грузов при измерении
давления. В данном случае более предпочтительно применение трехступенчатой
поршневой пары (рис. 4.27, в), которая позволяет подводить измеряемое и опорное
давления непосредственно в замкнутые измерительные камеры 2 и 3. При этом
обеспечивается свободный доступ к верхнему торцу 4 поршня при наложении
уравновешивающихся грузов.
Двухступенчатые (дифференциальные) поршневые пары (рис. 4.27. б) наиболее
часто применяются для многократного уменьшения измеряемого давления при измерении
высоких избыточных давлений или увеличения измеряемого давления при измерении
низких давлений.
Показания поршневых манометров, как и любых других приборов, зависят от
условий, в которых проводятся измерения. Поэтому, несмотря на то, что поршневые
манометры являются наиболее стабильными по сравнению с манометрами других
типов, в их показания при измерениях высокой точности необходимо вводить
соответствующие поправки, учитывающие влияние условий измерений. К ним
относятся: влияние температуры окружающей среды, деформации поршня и цилиндра
под действием измеряемого давления, а для поршневых манометров, в которых
измеряемое давление определяется по весу уравновешивающих его грузов,
необходимо учитывать местное ускорение свободного падения и потерю массы грузов
в воздухе.
Перспективы развития поршневых манометров тесно связаны с общим развитием
науки и техники. Здесь, в первую очередь, следует отметить достижения в
создании новых материалов поршневых пар, повышающих точность их изготовления,
прочностные характеристики и износостойкость, а также достижения в развитии
микроэлектроники, представляющие новые возможности автоматизации поршневых
манометров.
Повышение качества изготовления поршневых пар - одна из важнейших задач в
развитии поршневой манометрии. Применение в качестве материалов поршневых пар
сверхтвердых сплавов на основе карбида вольфрама, прочностные характеристики
которых (твердость, модуль упругости) существенно выше, чем у обычно
применяемых легированных сталей, а температурный коэффициент линейного
расширения ниже, позволяет соответственно снизить влияние измеряемого давления
и температуры на постоянство эффективной площади поршня и ее стабильность в
период эксплуатации манометра.
Деформационные манометры
По мере развития промышленности, особенно в связи с появлением паровых
машин и железных дорог, потребовались более удобные, чем жидкостные манометры
приборы.
Первый деформационный манометр с трубчатым чувствительным элементом был
изобретен случайно. Рабочий, при изготовлении змеевика для дистилляционного
аппарата, сплющил поперечное сечение цилиндрической трубки, изогнутой по
спирали. Тогда, чтобы восстановить форму трубки, один конец ее заглушили, а в
другой конец насосом дали давление воды. При этом часть трубки с
деформированным сечением приняла цилиндрическую форму, а спираль на этом
участке разогнулась. Этот эффект был использован немецким инженером Шинцем,
который в 1845 г. применил трубчатый чувствительный элемент для измерения
давления.
Простота и компактность деформационных манометров, возможность их
применения в различных условиях эксплуатации очень быстро поставили их на
первое место в технике измерения давления практически во всех отраслях
народного хозяйства.
Диапазон измерений деформационных манометров охватывает почти 10
порядков, простираясь от 10 Па (1 мм вод.ст.) до 1-2 ГПа (более 10000 кгс/см2).
При этом достигается высокая точность измерений, в отдельных случаях
погрешности измерений не превышают 0,02-0,05 %.
Основные принципы преобразования давления деформационным манометром
Принципиальное отличие деформационных манометров от жидкостных и
поршневых состоит в применении в качестве первичного преобразователя давления
упругого чувствительного элемента (УЧЭ). Чувствительный элемент, воспринимающий
измеряемое давление, представляет собой упругую оболочку, которая обычно
выполняется в форме тела вращения, причем толщина стенки оболочки существенно
меньше ее внешних размеров. Под действием измеряемого давления упругая оболочка
деформируется так, что в любой точке оболочки возникают напряжения,
уравновешивающие действующее на нее давление.
Понятие «деформационный манометр» в общем виде может быть сформулировано
следующим образом. Деформационный манометр - манометр, в котором измеряемое
давление, действующее на упругую оболочку УЧЭ, уравновешивается напряжениями,
которые возникают в материале упругой оболочки. Таким образом, УЧЭ преобразует
давление, являющееся входной величиной, в выходную величину, несущую
измерительную информацию о значении давления. Для УЧЭ естественно выбрать в
качестве выходной величины в зависимости от принципа действия деформационного
манометра: перемещение заданной точки УЧЭ; напряжение в материале заданной
точки и усилие, развиваемое УЧЭ под действием давления.
Выбор того или иного выходного сигнала УЧЭ определяет способы его
дальнейшего преобразования для получения результатов измерения давления, а,
следовательно, и принцип действия деформационного манометра. В технике
измерения давления нашли применение два основных метода: метод прямого
преобразования и метод уравновешивающего преобразования (рис.4.26).
По методу прямого преобразования (рис. 4.28, а) все преобразования
информации о значении давления проводятся в направлении от УЧЭ через посредство
промежуточных преобразователей П1, П2, . . ., Пn
к устройству И, представляющему результаты измерений давления в требуемой
форме. При этом суммарная погрешность преобразования определяется погрешностями
всех преобразователей, входящих в измерительный канал.
Метод уравновешивающего преобразования (рис. 4.28, б) характеризуется
тем, что используются две цепи преобразователей: цепь прямого преобразования,
состоящая из цепи промежуточных преобразователи П1, П2,
. . ., Пn, выходной сигнал которой Увых поступает на
указатель результата измерений И и, одновременно на цепь обратного
преобразования, состоящей из преобразователя ОП. Метод уравновешивания состоит
в том, что усилие N, развиваемое УЧЭ, уравновешивается усилием Nоп,
создаваемым обратным преобразователем ОП выходного сигнала Iвых цепи
прямого преобразования. Поэтому на вход последней поступает лишь отклонение
заданной точки УЧЭ от положения равновесия. В отличие от предыдущего метода
суммарная погрешность преобразования в данном случае почти полностью
определяется погрешностью обратного преобразователя. Однако применение метода
уравновешивания приводит к усложнению конструкции деформационного манометра. В
зависимости от назначения и принципа действия отдельные звенья измерительных
цепей деформационных манометров могут конструктивно выполняться в виде
самостоятельных блоков. Во многих случаях, например, при жестких
эксплуатационных условиях на объекте измерения (повышенная или пониженная
температура, высокий уровень вибрации, труднодоступность места подключения и
пр.) целесообразно свести к минимуму количество звеньев, находящихся
непосредственно на объекте. Конструктивная совокупность этих измерительных
элементов с обязательным включением в нее УЧЭ называется известным нам
датчиком. В то же время указатель результата измерений должен находиться в
месте, с более благоприятными условиями, удобном для наблюдателя. Это же
касается и остальной части измерительной цепи. Блочный принцип построения
целесообразен также и с точки зрения изготовления манометров на разных
предприятиях при массовом производстве.
В этой связи следует остановиться на часто применяемом понятии
"измерительный преобразователь давления" (ИПД). В принципе, ИПД - это
составная часть измерительной цепи многих современных деформационных
манометров, включающая промежуточный преобразователь с унифицированным выходным
сигналом. Поэтому выделение ИПД в самостоятельный раздел нецелесообразно из-за
неизбежности повторов при их описании. В то же время ИПД по функциональным
возможностям имеет более широкое применение, чем манометры.
Упругие чувствительные элементы деформационных манометров (УЧЭ).
Исторически первыми получили развитие деформационные манометры, в которых
мерой давления является деформация УЧЭ (перемещение заданной точки его упругой
оболочки). Эти манометры широко применяются и в настоящее время благодаря
относительной простоте преобразования перемещения в информацию об измеряемом
давлении. Вместе с тем, широкое распространение получили деформационные
манометры, основанные на непосредственном преобразовании в информацию об
измеряемом давлении напряжений (методы прямого преобразования), а также способы
силовой компенсации измеряемого давления (методы уравновешивания). Однако во
всех случаях применяются одни и те же типы УЧЭ. Основные типы УЧЭ: мембраны,
мембранные коробки, сильфоны и трубчатые пружины.
Мембрана представляет собой упругую пластину в форме диска, жестко
закрепленную по наружному контуру, прогиб которой определяется действующим на
нее давлением.
Мембранная коробка состоит из двух гофрированных мембран, герметично
соединенных по наружному контуру, что соответственно увеличивает ее прогиб под
действием давления.
Сильфон имеет форму тонкостенного цилиндра, боковая поверхность которого
гофрирована с целью увеличения его прогиба под действием давления. При большой
глубине вытяжки гофр сильфона становится идентичным батарее последовательно
соединенных мембранных коробок.
Трубчатая пружина представляет собой тонкостенную трубку, ось которой
искривлена по дуге окружности. В отличие от предыдущего трубчатая пружина под
действием давления разгибается, а ее свободный конец перемещается по дуге.
При преобразовании давления в перемещение основными метрологическими
характеристиками УЧЭ являются: упругая характеристика, нелинейность упругой
характеристики, чувствительность и жесткость, гистерезис и постоянство упругой
характеристики.
Индуктивные и трансформаторные (взаимоиндуктивные) электромагнитные
преобразователи
Индуктивными преобразователями называются преобразователи, преобразующие
перемещение в изменение индуктивности магнитной цепи. Принцип действия
преобразователя заключается в следующем (рис. 4.30). Преобразователь содержит
магнитопроводы 1 и 2 с катушками Z1 и Z2, между которыми
помещен жесткий центр 3 мембраны. Катушки питаются напряжением переменного тока
и включены в индуктивный мост, два дополнительных плеча которого составляют
постоянные сопротивления Z3 и Z4. В равновесном положении
мост сбалансирован и сила тока Iк в диагонали моста равна нулю. При
воздействии на мембрану давления жесткий центр сместится, что приведет к
увеличению магнитного сопротивления магнитопровода 1 и уменьшению сопротивления
магнитопровода 2, а вместе с тем и их полных электрических сопротивлений Z1
и Z2. В результате разбаланса моста по диагонали последнего потечет
ток Iк, пропорциональный перемещению центра мембраны, а
следовательно, давлению.
Дифференциальная схема индуктивного преобразователя, выходным параметром
которой является разность Z1 - Z2, расширяет линейный
участок до ∆δ = ± (0,3-0,4) δ0, а также существенно повышает чувствительность
преобразователя, которая позволяет фиксировать 0,1 мкм по перемещению жесткого
центра.
Индуктивные преобразователи пригодны для измерения любого вида давления:
абсолютного, избыточного и разности давлений. При этом достоинством индуктивных
преобразователей является отсутствие механических устройств для вывода
выходного сигнала УЧЭ к промежуточным преобразователям, что обусловливает
отсутствие потерь на трение в передаточном механизме. Поэтому индуктивные
преобразователи пригодны для измерения небольших разностей давлений при высоком
статическом давлении с хорошими динамическими характеристиками.
Резистивные деформационные манометры
Резистивные манометры основаны на изменении активного
электросопротивления проводников при их механической деформации. Впервые этот
эффект (тензоэффект) был рассмотрен английским физиком В. Томпсоном (лорд
Кельвин) в 1856 г. Экспериментальные исследования тензоэффекта для различных
металлов и сплавов были впервые проведены при давлениях до 300 МПа Лизелом
(1903 г.), а затем при давлениях до 1300 МПа Бриджменом (1911г.). Однако
широкое внедрение тензоресторной техники в промышленность началось со времен
второй мировой войны.
Принципиальное отличие тензометрического метода измерения давления
состоит в том, что мерой давления является не перемещение заданной точки УЧЭ в
осевом направлении, а деформации поверхности УЧЭ или поверхности связанного с
ним тела. Измерительный преобразователь, который преобразует деформации
поверхности твердого тела в изменение его электросопротивления, называется
тензорезистором.
Обычно выделяют следующие основные группы тензорезисторов: проволочные,
фольговые, тонкопленочные и полупроводниковые. При этом находят применение два
основных вида преобразования давления:
. давление, воспринимаемое УЧЭ, вызывает деформацию его поверхности
(растягивающую или сжимающую), которая преобразуется в изменение
электросопротивления тензорезистора;
. давление, воспринимаемое УЧЭ, преобразуется в сосредоточенную силу,
которая деформирует упругое твердое тело с жестко связанным с ним
тензорезистором; иногда производится промежуточное преобразование силы в момент
сил.
Аппаратура, содержащая промежуточные преобразователи различного
назначения, а также источники питания, усилитель выходного сигнала и вторичные
приборы для индикации и регистрации давления, требует существенно больших
затрат на изготовление, чем УЧЭ с вмонтированными в него тензорезисторами,
которые, как правило, включаются в мостовую схему и составляют вместе с УЧЭ
единый блок (датчик).
Тензорезисторы обычно включаются во все четыре плеча мостовой схемы, причем
для повышения чувствительности одна пара тензорезисторов работает на
растяжение, а другая на сжатие. Иногда два тензорезистора располагаются на
участках УЧЭ, подверженных деформации, а два других „холостых" (не
подвергаются растяжению или сжатию) предназначены для температурной компенсации
мостовой схемы. Для датчиков высокой точности требуются также уравновешивающие
и компенсационные элементы для корректировки нуля и диапазона измерений и пр.
Первыми были разработаны проволочные тензопреобразователи (проволочные
тензорезистивные манометры), предназначенные для измерения высоких давлений,
которые в отличие от указанных выше методов преобразования основаны на
всестороннем сжатии проводника непосредственно давлением окружающей среды без
применения УЧЭ, т. е. функции УЧЭ и тензорезистора совмещены в одном элементе.
В качестве материала проволочного сопротивления до настоящего времени
применяется манганин (сплав меди, марганца и никеля), эффективность которого
при создании тензоэффекта была выявлена исследованиями Лизела и Бриджмена еще в
начале нашего века.
Манганиновый манометр (рис. 4.31) содержит катушку сопротивления 6,
каркас которой с помощью двух металлических стержней 1 прикреплен к втулке 3, и
корпус 7 с штуцером для подключения измеряемого давления. Для уплотнения
стержней в их средней части имеются кольцевые утолщения, с двух сторон которых
помещены прокладки 4. Предварительное уплотнение производится с помощью гайки
2, а затем под действием давления верхние прокладки самоуплотняются. Для электрической
изоляции стержней, предназначенных для включения катушки сопротивления в
мостовую схему, стержни отделены от металлических деталей воздушными зазорами,
которые обеспечиваются центровкой стержней посредством изолирующих втулок 5 и
уплотнений 4.
Пределы рабочего давления манганиновых манометров обычно указывается в
кгс. Кгс - это килограмм-сила (русское обозначение: кгс или кГ; международное:
kgf или kgF) - единица силы в системе единиц МКГСС, является одной из основных
единиц этой системы. Равна силе, сообщающей телу массой один килограмм при
ускорении 9,80665 м/с², т.е. нормальном ускорении свободного падения. Итак,
диапазон давлений, измеряемых манганиновыми манометрами, составляет от 100 МПа
(1000 кгс/см2) до 4 ГПа (40000 кгс/см2), погрешность измерений
от 0,4 до 2,5 % (рабочие средства измерений) и от 0,2 до 0,6 % (образцовые
средства измерений). Долговременная стабильность (5-10 лет) и воспроизводимость
показаний хорошо изготовленных манганиновых манометров составляют ±0,2 %
каждая. Влияние температуры определяется изменением электросопротивления,
которое в среднем составляет 0,01 % на 1°С.
Манометры сопротивления практически не применимы при давлениях менее 50
МПа из-за относительно низкого тензоэффекта при всестороннем сжатии проводника.
Поэтому при измерении малых и средних давлений производится предварительное
преобразование давления в деформацию УЧЭ, которая создает в материале
тензорезистора требуемые растягивающие или сжимающие усилия. При этом
уменьшение давления компенсируется увеличением геометрических размеров УЧЭ и
уменьшением толщины его стенок.
На этом принципе основано подавляющее большинство проволочных
тензорезистивных манометров. Находят применение как наклеиваемые на поверхность
УЧЭ проволочные тензорезисторы, так и „свободные" тензорезистивные
преобразователи, в которых деформации подвергаются ненаклеенные проволочные
нити.
Общий недостаток конструкций с наклеиваемыми проволочными
тензорезисторами - нестабильность закрепления последних на деформируемой
поверхности, особенно при воздействии повышенных температур. С этой точки
зрения предпочтительнее „свободные" тензорезистивные преобразователи,
которые почти полностью совмещают функции упругого элемента и тензорезистора,
обеспечивая высокую собственную частоту и хорошую стабильность нуля, так как
жесткость других упругих элементов (мембраны, сильфона и пр.) в этом случае
выбирается существенно меньшей.
Одним из существенных недостатков проволочных тензорезисторов является
небольшая теплоотдача материала проволоки, так как площадь теплоотдачи
составляет половину цилиндрической поверхности проволоки. Поэтому возможности
миниатюризации ограничиваются допускаемым уменьшением диаметра проволоки,
который обычно составляет не менее 20-30 мкм. Гораздо большие возможности
предоставляет техника изготовления тензорезисторов из металлической фольги,
которая к настоящему времени достаточно хорошо испытана и отработана. Типичная
конструкция фольгового тензорезистора состоит из тонкой металлической фольги 1,
выполненной в виде петлеобразной решетки, которая специальным клеем закреплена
на подложке 2 из изоляционного материала.
К расширенным концам решетки припаиваются проволочные токосъемники 3, а
сверху на решетку наносится изоляционное покрытие 4 для защиты от воздействия
окружающей среды. Сопротивление резистора определяется базой l, числом
последовательно соединенных полосок фольги и их поперечным сечением. В качестве
материала фольги обычно применяют константан, подложки - бакелитовую или
эпоксидную смолу. Для изготовления фольговых тензорезисторов и их закрепления
на поверхности УЧЭ используются в зависимости от условий работы (температуры,
влажности, агрессивности среды) различные клеящие составы, затвердевающие в
горячем состоянии.
Тензорезисторы закрепляются непосредственно на поверхности УЧЭ или на
упругую балочку, связанную с УЧЭ жестким стержнем, и включаются в мостовую
схему. Манометры, основанные на указанном принципе, позволяют измерять давление
с высокой точностью. Так, цифровой манометр „Diptron 2" фирмы „Wallance
& Tiernan" (ФРГ) предназначен для измерения давления с погрешностью
0,05 %. Манометр (рис. 4.32, б) содержит сильфон 1, преобразующий измеряемое
давление р в усилие, которое с помощью стержня 2 изгибает упругую балку 4.
Пропорциональная давлению деформация воспринимается тензорезисторами 3,
включенными в мостовую схему, причем два резистора работают на растяжение, а
два других - на сжатие. Усилителем 1 (рис. 4.30, в) выходной сигнал усиливается
и после преобразований поступает на цифровое табло указателя 2. Одновременно
происходит преобразование в аналоговый и кодовый выходные сигналы.
Несмотря на ряд очевидных достоинств (высокая точность, хорошая
долговременная стабильность, высокая собственная частота, применимость для
изготовления небольших серий) фольговые тензорезисторы имеют также и
недостатки: относительную дороговизну, в связи с жесткими допусками на
изготовление; невысокую тензочувствительность, свойственную всем металлическим
тензорезисторам (k ≈ 2), что требует соответствующего усиления;
ограниченные диапазон температур и возможности миниатюризации.
Тонкопленочные тензорезисторы. Дальнейшие возможности развития
тензорезистивных манометров предоставила тонкопленочная техника, получившая в
последнее время распространение в различных областях микроэлектроники, в
которой, в отличие от фольговой техники, перед нанесением на подложку
проводящего материала тензорезисторов на поверхность УЧЭ наносится изоляционный
слой, толщиной в несколько мкм, затем низкоомные проводники монтажной схемы и,
в последнюю очередь, сам тензорезистор. При этом применяются методы напыления в
вакууме, плазменной активации паров требуемых химических веществ и пр., которые
позволяют наносить не только металлические пленки, но и поликристаллические
материалы с повышенным коэффициентом тензочувствительности (k=30-50). Все это
позволяет существенно уменьшить размеры УЧЭ при одновременном уменьшении
диапазона измерений. Однако сложность технологии изготовления требует
значительных затрат на оборудование. Поэтому изготовление тонкопленочных
тензорезисторов рентабельно только при условии их массового производства
В отличие от металлических тензорезисторов, сопротивление которых
изменяется вследствие деформации поперечного сечения, в полупроводниковых
тензорезисторах чувствительным к натяжению является удельное сопротивление,
которое занимает очень широкий диапазон значений. Если удельное сопротивление
проводников находится в диапазонах 10-5  10-8 Омм, а диэлектриков 108
÷ 1016
Омм., то диапазон удельных
сопротивлений полупроводников простирается от 10-5 104, т. е. охватывает
почти 10 порядков. Помимо этого сопротивление полупроводников существенно
зависит от содержания в них примесей, подбором которых можно изменять
сопротивление в нужном на правлении. Примеси, которые создают в полупроводнике
свободные электроны, называют донорными, а сам полупроводник называют n-типа
(от „негатив” - отрицательный). Примеси, которые захватывают валентный электрон
и при этом у одного из атомов полупроводника возникает „дырка”, называют
акцепторными (принимающим), а проводимость про водника р-типа (от „позитив” -
положительный). Количество свободных носителей зарядов (электронов и дырок) определяет
проводимость, а, следовательно, и удельное сопротивление полупроводника. При
этом чувствительность удельного сопротивления полупроводникового тензорезистора
к его деформации существенно выше, чем изменение сопротивления под влиянием
изменения поперечного сечения.
10-8 Омм, а диэлектриков 108
÷ 1016
Омм., то диапазон удельных
сопротивлений полупроводников простирается от 10-5 104, т. е. охватывает
почти 10 порядков. Помимо этого сопротивление полупроводников существенно
зависит от содержания в них примесей, подбором которых можно изменять
сопротивление в нужном на правлении. Примеси, которые создают в полупроводнике
свободные электроны, называют донорными, а сам полупроводник называют n-типа
(от „негатив” - отрицательный). Примеси, которые захватывают валентный электрон
и при этом у одного из атомов полупроводника возникает „дырка”, называют
акцепторными (принимающим), а проводимость про водника р-типа (от „позитив” -
положительный). Количество свободных носителей зарядов (электронов и дырок) определяет
проводимость, а, следовательно, и удельное сопротивление полупроводника. При
этом чувствительность удельного сопротивления полупроводникового тензорезистора
к его деформации существенно выше, чем изменение сопротивления под влиянием
изменения поперечного сечения.
Конструктивное выполнение полупроводниковых тензорезисторов аналогично
тонкопленочным тензорезисторам (рис. 4.32, а). Те же технологические приемы
применяются и при изготовлении полупроводниковых тензорезисторов. При этом
используются два основных способа:
. полупроводниковый кремниевый тензорезистор наносится на изолирующую
сапфировую подложку (КНС структура);
. полупроводниковый кремниевый тензорезистор с р-проводимостью наносится
на кремниевую подложку с n-проводимостью (КНК структура).
В зависимости от конструктивного исполнения полупроводниковые
тензорезистивные преобразователи применяются для измерения абсолютного и
избыточного давления (разряжения) и разности давлений.
Преимуществами тензорезистивных полупроводниковых преобразователей является:
высокий коэффициент тензочувствительности; возможность миниатюризации
чувствительного элемента; непосредственное применение достижений современной
микроэлектроники.
К недостаткам полупроводниковых преобразователей относятся: сложность
технологии изготовления ЧЭ, что неприемлемо при мелкосерийном производстве;
хрупкость ЧЭ, что ограничивает их применение в условиях сотрясений, скачков
давления; относительно большое влияние температуры на коэффициент
тензочувствительности. Последнее особенно важно для тензорезисторов, основанных
на КНК структурах, максимальная температура эксплуатации которых ограничена
120°С.
Манометры с силовой компенсацией
Все рассмотренные выше деформационные манометры основаны на методе
прямого преобразования давления (см. рис. 4.26, а). Метод уравновешивающего
преобразования давления (см. рис. 4.26, б), хотя и менее распространен в
технике измерения давления, но продолжает сохранять заметную роль в некоторых
отраслях промышленности, в которой находят применение манометры с силовым
уравновешиванием двух типов: уравновешивание измеряемого давления
пневматическим давлением (пневматическая силовая компенсация); уравновешивание
измеряемого давления электромагнитными силами (электромагнитная силовая
компенсация).
При этом во время уравновешивания силы, возникающей в первичном ЧЭ под
действием измеряемого давления, силой, развиваемой цепью обратной связи,
происходит незначительное перемещение первичного ЧЭ, независимо от его
жесткости, что позволяет в широких пределах варьировать чувствительностью
измеряемой системы.
Перспективы развития деформационных манометров
По принципу действия деформационные манометры требуют для своей
градуировки применения методов и средств, основанных на абсолютных методах
воспроизведения давления. Повышение их точности, в принципе, ограничено
точностью применяемых при градуировке жидкостных и поршневых эталонов, которая
характеризуется погрешностями порядка 10-5 - 5•10-5. Это
позволило уже в настоящее время создать образцовые деформационные манометры,
погрешности которых не превышают 2,5•10-4 - 5•10-4
(0,025-0,05 %).
Одно из важнейших направлений развития точных деформационных манометров -
разработка портативных образцовых переносных манометров, пригодных для контроля
рабочих средств измерений на месте их эксплуатации.
Переносной манометр содержит переключатели единиц измерений и диапазонов
измерений, ручной насос, регулятор объема, корректор нуля и штуцер для
подключения измеряемого давления. Питание прибора осуществляется от батареек
напряжением 12В или от внешнего источника питания.
Однако основное назначение деформационных манометров состоит в
удовлетворении потребностей различных отраслей промышленности в измерении
давления, так как в каждой отрасли существуют свои требования к условиям
эксплуатации, формам представления информации, точности и надежности,
необходимым габаритным размерам и массе, стоимости приборов и пр. Все это
требует совершенствования различных параметров и свойств деформационных
манометров, специфика которых определяется их назначением и принципом действия.
Деформационные манометры, основанные на электрических методах
преобразования (индуктивные, емкостные и др.), обеспечивая достаточно высокую
точность, нуждаются в совершенствовании методов защиты их электрических цепей
от воздействия внешних электрических и магнитных полей, особенно при
необходимости размещения на расстоянии УЧЭ и электроники.
Дальнейшее развитие получают металлические и полупроводниковые
тензорезистивные деформационные манометры.
Технология изготовления кремниевых полупроводниковых тензодатчиков в
настоящее время отработана достаточно хорошо и ее совершенствование будет
продолжаться по мере развития микроэлектроники. Однако при температуре выше
200°С полупроводниковый кремний теряет свою тензочувствительность, превращаясь
в обычный проводник, что не допускает их применение в условиях высоких
температур (внутри работающих автомобильных и реактивных двигателей, в буровых
установках глубокого бурения и пр.). Весьма перспективна для этих целей замена
кремния на карбид кремния (карборунд). В настоящее время уже созданы
транзисторы из карбида кремния на подложке из его окислов, нанесенной на
металлическую мембрану. Полупроводниковые свойства такого тензорезистора при
температуре 650°С аналогичны свойствам обычного кремниевого тензорезистора при
температуре 20°С.
В настоящее время проводятся также разработки полупроводниковых
тензорезисторов, предназначенных для работы в условиях низких температур
(сверхпроводящие магнитные системы термоядерных установок, криогенные
накопители энергии, реактивные двигатели на сжиженном водороде и пр.) в
диапазоне от 2 до 100К (от -271 до -173° С). В этих условиях чистые
полупроводники превращаются в диэлектрики. Введение в кремний примесей
позволяет сохранить тензочувствительность, хотя она существенно снижается. В
нашей стране разработан датчик такого типа.
4.4.2 Методы косвенных измерений давления
В отличие от методов прямых измерений давления, на которых основаны
рассмотренные ранее жидкостные, поршневые и деформационные манометры, методы
косвенных базируются на измерении физических величин (температуре, объеме),
значения которых связаны с давлением известными физическими закономерностями,
или на изменении физических свойств измеряемой среды под действием давления
(теплопроводности, вязкости, электропроводности и пр.).
Косвенные методы, как правило, находят применение в тех случаях, когда
прямые методы измерения давления трудно осуществимы, например, при измерении
весьма малых давлений (вакуумные измерения) или при измерениях сверхвысоких
давлений. Обычно различают косвенные методы, основанные на:
• уравнении состояния идеального газа;
• фазовых переходах;
• изменении физических свойств измеряемой среды.
Косвенные методы, основанные на уравнении состояния идеального газа
Связь между важнейшими термодинамическими параметрами газа определяется
соотношением
/T= const, (4.29)
где р - абсолютное давление газа; Т - абсолютная температура газа; V -
объем, занимаемый газом.
Соотношение (4.29) называется объединенным газовым законом и
формулируется следующим образом: при постоянной массе газа произведение объема
на давление, деленное на абсолютную температуру газа, есть величина, одинаковая
для всех состояний этой массы газа.
Уравнение состояния для произвольной массы идеального газа (уравнение
Клайперона-Менделеева) имеет вид
VM=
m RT/μ, (4.30)
где VM- молярный объем; Т- абсолютная
температура идеального газа,  масса газа; μ - масса одного киломоля газа;
R=8,3144621
масса газа; μ - масса одного киломоля газа;
R=8,3144621 Дж/(мкмоль
Дж/(мкмоль ) - универсальная газовая постоянная.
) - универсальная газовая постоянная.
Для упрощения процесса измерения давления один из параметров состояния (Т
или V) сохраняется постоянным. Тогда давление однозначно определяется по
результатам измерения V или Т. Например, при измерении изменений атмосферного
давления в баронивелировании нашли применение газовые барометры, принцип
действия которых основан на использовании уравнения состояния газа (8) при
постоянной температуре, т. е. при постоянной массе газа и неизменной
температуре давление обратно пропорционально занимаемому газом объему.
Принципиальная схема газового барометра конструкции Штриплинга. Прибор
состоит из двух камер, одна из которых 2 может быть сообщена с атмосферным
давлением, а другая 3 замкнута. Обе камеры связаны между собой капилляром, в
середине которого находится капля масла 1, выполняющая роль указателя нуля. При
равенстве давлений в камерах капля устанавливается на нулевой отметке.
Равенство давлений достигается изменением объема камеры 3 посредством
перемещения сильфона 4 с помощью винта и червячной передачи с отсчетом числа
оборотов червяка по цифровому счетчику. При погрешности термостатирования 0,001°С
изменения давления фиксируются с погрешностью менее 0,5 Па.
В дифференциальном газовом барометре системы Д.И. Менделеева изменение
атмосферного давления определяется комбинированным методом. Барометр состоит из
замкнутого сосуда 1, соединенного с давлением окружающего воздуха при помощи
V-образного жидкостного манометра 2.
Барометр основан на уравновешивании изменений атмосферного давления как
столбом жидкости, так и сжатием (расширением) газа в замкнутом сосуде по закону
Бойля-Мариотта. Как и ранее, необходимо тщательное термостатирование сосуда 1
или введение температурной поправки, равной 0,37 % на 1°С.
Следует отметить, что рассмотренные выше газовые барометры в связи с
появлением высокоточных деформационных барометров аналогичного назначения в
настоящее время практически не применяются. В отличие от этого в области
вакуумных измерений указанный принцип находит широкое применение.
Компрессионные („компрессия" - сжатие) и экспансионные („экспансия" -
расширение) манометры являются основными средствами воспроизведения к передачи
единицы давления в области вакуумных измерений в диапазоне от 10-3
до 103 Па (10-5 -10 мм рт. ст.).
Косвенные методы, основанные на фазовых переходах
Известно, что любое вещество в зависимости от давления и температуры
может находиться в различных агрегатных состояниях (твердой, жидкой и
газообразной фазах). Типовая диаграмма состояний в координатах р и Т
представлена на рис. 4.35. Кривыми линиями изображены границы между различными
фазами (кривые равновесия фаз), соответствующие давлениям и температурам, при
которых из одной фазы в другую переходит одинаковое число молекул.
При этом кривая СК выражает зависимость от температуры давления
насыщенного пара над жидкостью; кривая АС - давления насыщенного пара над
твердым телом, кривая ВС - температуры плавления от давления. Например, при
давлении р1 и температуре Т1, будет наблюдаться
равновесие твердой 1 и газообразной 2 фаз. Если при той же температуре Т1,
давление понизить, то начнется переход твердой фазы в газообразную. Этот процесс
называется возгонкой или сублимацией („сублимаре" - возносить).
Аналогично на границе ВС происходит плавление твердой фазы
(кристаллизация жидкой фазы 3), а на границе СК - кипение жидкой фазы
(конденсация газообразной фазы). Необходимо отметить также две особые точки.
Тройная точка С, находящаяся на пересечении всех трех кривых равновесия фаз,
характеризует состояние вещества, когда находятся в равновесии одновременно
твердая, жидкая и газообразная фазы. Критическая точка К соответствует
критической температуре Тк и критическому давлению рк,
при которых теряется всякое различие между жидкостью и ее паром, а граница
между ними исчезает.
Указанные выше кривые равновесия фаз и тройная точка используются в
косвенных методах определения давления по результатам измерения температуры в
равновесных точках (в области температурных измерений, наоборот, температура
определяется по результатам измерения давления).
Диаграмма состояний дает наглядное представление о выборе того или иного
фазового перехода в зависимости от определяемого давления. Кривая плавления ВС
немного отклоняется от вертикали к оси абсцисс, т. е. температура плавления
имеет небольшую чувствительность к давлению. Так, температура плавления льда
изменяется на 1К при изменении давления на 13 МПа (следует отметить, что в
отличие от большинства веществ температура плавления льда понижается при
повышении давления - штриховая линия СВ на рис. 4.35) , поэтому кривые
плавления используются в косвенных методах определения высоких и сверхвысоких
давлений. Процесс сублимации (кривая АС) происходит, как правило, при низких
температурах и давлениях, что позволяет его использовать при определении
давления в области вакуумных измерений. И, наконец, фазовый переход
жидкость-пар (кривая СК) наиболее удобен для области средних давлений помимо
указанного, пои выборе того или иного фазового перехода необходимо учитывать
физические свойства применяемого вещества.
В области измерения высоких и сверхвысоких давлений его значение
воспроизводится по кривой плавления ртути, полуэмпирическое уравнение которой
получают по результатам исследований сравнением с эталонным поршневым
манометром. Это позволяет построить непрерывную шкалу давлений, по которой
градуируются средства измерений высоких и сверхвысоких давлений низшей точности.
В области средних давлений, где успешно применяются высокоточные средства
измерений, основанные на прямых методах, использование косвенных методов
нецелесообразно. Однако представляет интерес, получивший распространение в
первой половине нашего века простой способ измерения атмосферного давления,
основанный на фазовых переходах „жидкость-пар" (кривая СК на рис. 4.35),
который легко может быть продемонстрирован в любой, даже школьной, лаборатории.
Косвенные методы, основанные на изменении физических свойств измеряемой
среды
Для определения давления находят также применение методы, основанные на
зависимости от давления различных физических свойств жидкостей и газов и
протекающих в них процессах. При этом были использованы результаты исследований
влияния давления на плотность и вязкость, диэлектрическую проницаемость,
скорость распространения ультразвука, теплопроводность и другие свойства
измеряемой среды.
В области высоких и средних давлений указанные методы широкого
распространения не получили в связи с их относительной сложностью и
трудоемкостью по сравнению с другими методами (применение манганинового
манометра сопротивления в области высоких давлений, прямые методы измерений в
области средних давлений).
В области вакуумных измерений указанные методы применяются практически
повсеместно. Зависимость теплопроводности разреженного газа от давления
используется в тепловых и термопарных манометрах; зависимость тока
положительных ионов от измеряемого давления - в ионизационных манометрах.
Используется также зависимость от давления вязкости газа, кинетической энергии
молекул, концентрации молекул и пр.
Наибольшее распространение в вакуумной технике (около 70 %) получили
термопарные и ионизационные манометры.
Термопарный манометр (рис. 4.36, а) так же, как и тепловой, основан на
зависимости теплопроводности разреженного газа от давления. Манометр содержит
стеклянную или металлическую колбу 3, в которой помещены нагреватель 1 к
впаянная в него термопара 2. Нагреватель питается от источника переменного
тока, и его температура, а следовательно, и температура термопары, определяется
теплоотдачей в окружающий разреженный газ. Чем меньше давление газа, тем меньше
его теплопроводность и тем больше температура, а следовательно, ЭДС на выходе
термопары, которая и является мерой измеряемого давления. Шкала прибора 4 для
измерения ЭДС градуируется, как правило, в единицах давления. Данный принцип
наиболее эффективен при давлениях от 0,1 до 100 Па. При давлениях, меньших 0,1
Па, все большая доля тепла передается излучением, а при давлениях, больших 100
Па, увеличение теплопроводности газа резко замедляется. В обоих случаях
существенно уменьшается чувствительность прибора. Погрешность измерений
составляет 10-30 %. На градуировочную характеристику существенно влияет состав
газа. Поэтому для уточнения показаний термопарного манометра необходима
индивидуальная градуировка.
Принцип действия ионизационного манометра основан на зависимости от
давления тока положительных ионов, образованных в результате ионизации
разреженного газа. Ионизация газа осуществляется электронами, ускоряемыми
электрическим или магнитным полями, а также посредством излучения
радиоизотопов. При одном и том же количестве электронов, пролетающих через газ,
или постоянной мощности излучения степень ионизации газа пропорциональна
концентрации его молекул, т. е. измеряемому давлению
В простейшем случае наиболее употребим ионизационный манометр с горячим
катодом (рис. 4.36, б), содержащий стеклянную колбу 2, в которую впаяны анод 1
и катод 3. Благодаря разогреву катода источником постоянного тока 4, его
поверхность испускает электроны, которые разгоняются напряжением Uа
между катодом и анодом и ионизируют находящийся между ними газ.
Для увеличения степени ионизации между катодом и анодом помещена сетка,
на которую подается напряжение, сообщающее дополнительное ускорение потоку
электронов. Манометры этого типа охватывают диапазон от 10-7 до 1
Па, дополняя диапазон измерений термопарного манометра. Погрешности измерений
составляют также 10-30 % [35].
4.5 Методы и средства измерения расхода
Расход - это количество вещества, протекающее через данное сечение в
единицу времени. Количество можно измерять в единицах массы (кг, т) или
единицах объема (м3). Следовательно, расход можно измерять в
единицах массы, деленных на единицу времени (кг/с, кг/мин, кг/ч, т/ч), или в
единицах объема, также деленных на единицу времени (м3/с, м3/мин,
м3/ч). В первом случае имеем массовый расход, во втором - объемный
расход.
Прибор для измерения расхода называют расходомерами, а приборы для
измерения количества - счетчиками количества (счетчиками).
Измерение расхода и количества является сложной задачей, поскольку на
показания приборов влияют физические свойства измеряемых потоков: плотность,
вязкость, соотношение сред в потоке и т.п. физические свойства измеряемых
потоков, в свою очередь, зависят от условий эксплуатации, главным образом от
температуры и давления. Если условия эксплуатации отличаются от условий, при
которых производилась их градуировка, то ошибка в показаниях прибора может
значительно превысить допустимые значения. Поэтому для серийно выпускаемых
приборов установлены ограничения области их применения: по свойствам
измеряемого потока, максимальной температуре и давлению, содержанию твердых
частиц или газов в жидкости и т.п.
Классификация приборов для измерения расхода
В зависимости от принятого метода измерения приборы для измерения расхода
и количества подразделяются на:
. Расходомеры переменного перепада давления;
. Расходомеры постоянного перепада давления (расходомеры обтекания);
. Электромагнитные расходомеры;
. Ультразвуковые расходомеры;
. Расходомеры переменного уровня;
. Тепловые расходомеры;
. Вихревые расходомеры.
. Тахометрические расходомеры - основаны на преобразовании скорости
потока в угловую скорость вращения обтекаемого элемента. Подразделяются на
турбинные, шариковые и камерные.
Рассмотрим особенности наиболее распространенных расходометров (1-7).
4.5.1 Расходомеры
переменного перепада давления
Расходомеры постоянного перепада давления, работающие по методу
дросселирования потока, предназначены для измерения количеств газов, жидкостей
и водяного пара, проходящих по трубопроводам.
Принцип метода измерения заключается в том, что если трубопровод сузить в
каком-либо месте, то часть потенциальной энергии потока переходит в кинетическую.
Это сопровождается увеличением скорости потока в месте сужения и уменьшения
давления за сужающим устройством. Разность давления в сужающем устройстве
зависит от количества проходящего по трубопроводу вещества и служит мерой его
расхода.
В комплект расходомера входят: сужающее устройство, устанавливаемое на
трубопроводе, дифференциальный манометр и вторичный прибор, записывающий и
показывающий величину расхода газовых или жидкостных потоков. В некоторых
случаях вторичный прибор суммирует количество измеряемого вещества.
Расход вещества, соответствующий наибольшему перепаду давления ∆P
(Н/м2) в сужающем устройстве, рассчитывается по формулам:
где Q0 - объёмный расход; Qм - массовый расход; α - коэффициент расхода; F0
- площадь отверстия сужающего устройства.
Коэффициент расхода газовых и жидкостных потоков α есть отношение действительного
расхода к теоретически возможному, и учитывает сопротивление потоку,
оказываемое трубопроводом и сужающим устройством. Определяется коэффициент
расхода по экспериментальным данным, теоретически он вычислен быть не может.
Величина коэффициента расхода определяется многими факторами, а именно:
конструкцией дроссельного устройства, значением критерия Рейнольдса, состоянием
поверхности (шероховатостью) дроссельного устройства и трубопровода, свойствами
протекающей жидкости и отношением диаметра отверстия в дроссельном устройстве к
диаметру трубопровода. Это отношение характеризуется числом m = (d1/D)2,
которое называется модулем сужающего устройства.
Число Рейнольдса Re определяется режимом течения жидкости или газа. В
зависимости от режима различают ламинарное течение и турбулентное течение. Оно
является безразмерным числом, зависящим от скорости потока v, вязкости m и
плотности жидкости r и характерной длины элемента потока L, т.е.
Влияние числа Рейнольдса на коэффициент расхода сказывается только до
некоторого его предельного значения Reпред, выше которого a
перестаёт зависеть от него и остаётся постоянным. Поэтому при измерении расхода
необходимо, чтобы действительное значение числа Рейнольдса при данном расходе
было выше предельного.
Основные типы сужающих устройств и их характеристики.
Сужающие устройства делятся на нормальные и ненормализованные. К
нормальным сужающим устройствам относятся дисковые диафрагмы, сопла и трубы
Вентури. Для них справедливы табличные значения коэффициента расхода α, модуля m и числа Рейнольдса
предельного Reпред.
Нормальные сужающие устройства удовлетворяют требованиям [36].
К ненормализованным (специальным) сужающим устройствам относятся
устройства индивидуального изготовления, сдвоенные и сегментные диафрагмы,
сопла с профилем четверти круга, диафрагмы с двойным скосом и др. Эти сужающие
устройства применяются при особых случаях измерения расхода. Например,
сдвоенные диафрагмы применяются для измерения расхода при малой линейной
скорости потока, сегментные - при измерении расхода газов и жидкостей,
содержащих взвешенные частицы. В отличие от нормальных сужающих устройств они
требуют индивидуальную градуировку для тех пределов значений Re, при которых
каждое из них будет применяться.
Сужающие устройства необходимо выбирать на основании следующих положений:
а) нормальные диафрагмы применяются для трубопроводов диаметром D ≥
0,05 м; допустимый модуль диафрагмы лежит в пределах 0, 05 ≤ m ≤ 0,
7;
б) сопла рекомендуется устанавливать для трубопроводов диаметром D ≤
0,2 м при измерении расхода газа, перегретого пара или агрессивных жидкостей и
газов, если m ≤ 0, 6;
в) трубы Вентури устанавливают в тех случаях, когда требуется повышенная
точность измерения и когда величина остаточной потери давления имеет решающее
значение.
Диафрагмы. Нормальная диафрагма представляет собой тонкий металлический
диск 1, имеющий круглое отверстие, расположенное концентрично оси трубы, с
прямоугольной кромкой на стороне входа и со скосом на стороне выхода (при
значительной толщине диска диафрагмы). Поток входит в цилиндрическую часть
отверстия. Отбор давлений до и после диафрагмы осуществляется, как правило, при
помощи кольцевых камер 2, как показано на рис. 4.38. В этом случае сужающее
устройство называется камерной диафрагмой. В трубопровод кольцевые камеры
вместе с диафрагмой устанавливаются с использованием фланцев 3, соединённых при
помощи болтов или шпилек 5 и гаек 6. Трубы 4 соединяются с фланцами при помощи
сварки.
Кольцевые камеры позволяют несколько сгладить случайные изменения
давления до и после сужающего устройства.
Толщина диска диафрагмы не должна превышать 0,05 D20.
Наименьшая толщина диафрагмы при передаче давления ∆Р ≥15696 Н/м2
(1600 кгс/м2) определяется расчётным путём, исходя из условий
механической прочности диска.
В трубопроводах диаметром более 0,4 м диафрагмы могут быть установлены
без кольцевых камер 2.
При отборе перепада давления через отдельные отверстия без кольцевых
камер диаметр отверстий должен быть 0,03∆20, но не менее 0,04
м и не более 0,015 м, а при измерении расхода влажного газа - не менее 0,008 м
и не более 0,015 м.
В случае больших трубопроводов диаметром более 0,5 м отбор давления по
сторонам диафрагмы производится через четыре и более пар отверстий по периметру
трубопровода, соединяющих полости трубопровода с двумя усредняющими кольцевыми
трубками, от которых импульсные трубки отходят к дифманометру.
Сопло. Устройство сопла показано на рис. 4.39. Давление потока перед
соплом и после него отбирается обычно при помощи кольцевых камер 1 и 2. Сопло 3
состоит из профильной входной части, цилиндрической средней части и выходного
конуса. Так как сужение потока происходит плавно, то зоны вихрей перед соплом
не возникают. Это приводит к меньшей потере давления в потоке за сужением по
сравнению с диафрагмой. Сопло, для которого известно значение коэффициента
расхода α,
называется нормальным
соплом.
Значительно более низкая стоимость изготовления диафрагм обусловливает их
преимущественное применение в качестве сужающих устройств при измерениях
расхода. Однако сопла также имеют некоторые важные преимущества:
а) в процессе эксплуатации в результате коррозии и оседания загрязнений
входная кромка диафрагмы скругляется и приобретает форму входного профиля
сопла. Коэффициент сжатия струи и коэффициент расхода диафрагмы увеличиваются.
В соплах так же как и в диафрагмах, загрязняющие среду частицы оседают на
входе, однако основная выходная часть сопла остаётся длительное время чистой. В
отличие от диафрагм по мере загрязнения входных отверстий сопел коэффициент
расхода сопла уменьшается;
б) основные конструктивные размеры сопел в отличие от размеров диафрагмы
определяются кратными значениями D или d, что соответствует требованиям
геометрического подобия; основные размеры диафрагм (угол скоса кромки и длина
цилиндрической части) не могут отвечать указанному требованию;
в) перепады давления, возникающие в соплах и диафрагмах, при одинаковых
расходах и соотношениях размеров проходных сечений обратно пропорциональны
квадрату коэффициента расхода, так что перепад давлений на соплах при
одинаковом значении m составляет лишь 40% перепада давления на диафрагме.
Именно поэтому сопла применяют для измерений таких расходов, при которых
соотношение размеров сечений диафрагм при заданном измерителе перепада давления
оказывается слишком большим, например, при измерении расхода, пара высокого
давления, когда вследствие необходимости экономии дорогостоящих материалов применяют
трубопроводы малого диаметра и допускают высокие скорости протекания пара.
Труба Вентури. Устройство трубы Вентури показано на рис. 4.40. Эффект
Вентури - падение давления в момент, когда жидкость или газ проходит через
суженную часть трубы. Этот эффект назван в честь итальянского физика Джовани
Вентури (1746-1822). Интенсивность всасывания зависит от величины перепада
давления в трубке и диаметра самой трубки. Она применяется для труб диаметром
0,1…0,8 м при условии: 0,2 ≤ m ≤ 0,5.
Угол входного конуса равен 21°, угол выходного конуса должен
удовлетворять условию: 5° ≤  ≤ 15°.
≤ 15°.
Отбор статических давлений осуществляется не менее, чем шестью
отверстиями через кольцевые камеры. Отверстия располагаются на расстоянии D/2 и
d/2 от начала и конца входного конуса, их диаметр d ≥ 0,003 м.
Трубы Вентури сложнее изготовить, они имеют значительные габариты, однако
их следует применять в тех случаях, когда предъявляются жёсткие требования к
минимизации остаточных потерь давления [36].
4.5.2
Расходомеры постоянного перепада давления
Ротаметры предназначены для измерения объёмного расхода плавно меняющихся
однородных потоков чистых или слабозагрязнённых жидкостей и газов с дисперсными
включениями.
Принцип действия ротаметров (стеклянных и металлических), основан на
восприятии динамического давления потока измеряемой среды чувствительным
элементом ротаметра - поплавком, помещённым в коническую трубу, по которой
вверх проходит поток измеряемой среды.
При изменении положения поплавка проходное сечение между ним и внутренней
стенкой конической трубы изменяется, что ведёт к изменению скорости потока в
проходном сечении, а, следовательно, к изменению перепада давления на поплавке.
Перемещение поплавка происходит до тех пор, пока перепад давлений не станет
равным массе поплавка, приходящей на единицу площади его поперечного сечения.
Каждому значению расхода среды, проходящему через ротаметр при
определённой плотности и кинематической вязкости, соответствует вполне
определённое положение поплавка. При этом перепад давлений ∆P под
поплавком и над ним остаётся величиной постоянной и равной:
 , (4.33)
, (4.33)
где mg - сила тяжести, действующая на поплавок; S - площадь наибольшего
поперечного сечения поплавка.
На заводах-изготовителях ротаметры градуируются по воде или воздуху. Для
применения ротаметра на других средах требуется индивидуальная градуировка.
Ротаметры стеклянные (рис. 4.38) для местного измерения расхода
конструктивно представляют собой вертикальную стеклянную трубу конического
сечения 1, вмонтированную в корпус расширяющимся концом вверх. Внутри трубы 1
находится поплавок 2, перемещаемый вертикально потоком жидкости или газа,
протекающим снизу вверх.
Шкала прибора условная, в процентах, нанесена непосредственно на
стеклянной трубке. Отсчёт показаний прибора производят по верхней острой кромке
поплавка.
Некоторые поплавки имеют канавку в верхней части, вырезанную под углом.
Благодаря этому происходит вращение поплавка, из-за чего его положение
становится более устойчивым.
У ротаметров типа РМ поплавок изготовляется из стали Х18Н9Т,
анодированного дюралюминия, титана или эбонита, в зависимости от пределов
измерения. Материал деталей, соприкасающихся с измеряемой средой, у ротаметров
РСС, предназначенных для измерения расхода агрессивных сред - фторопласт-4 и
лабораторное стекло.
Ротаметры типов РС-3Е и РМ могут работать при температуре окружающей
среды 5…50 °С и такой же температуре окружающего воздуха, ротаметры РСС - при
температуре -40…+100 °С и окружающей среды -40…+40 °С. Нижний предел измерения
составляет 20% верхнего. Основная погрешность ±2,5%.
Ротаметры с электрической дистанционной передачей показаний типа РЭ
являются бесшкальными преобразователями для измерения расхода жидкостей и
преобразования его в выходной унифицированный сигнал. Градуировка ротаметров
индивидуальная, производится заводом-изготовителем по воде при температуре воды
и окружающего воздуха 20 ± 5 °С.
Ротаметры электрического типа РЭ бывают в двух исполнениях: РЭ -
пылебрызгозащищённом; РЭВ - взрывозащищённом, предназначены для работы во
взрывоопасных помещениях и имеют взрывозащиту ВЗГ (по градации ПИВЭ).
Минимальный расход среды, который может быть надёжно измерен, составляет 20%
максимального значения измеряемого расхода.
Конструктивно ротаметр (рис. 4.41) представляет собой стальной корпус с
камерой, внутри которой имеется кольцевая диафрагма и поплавок со стержнем. В
верхней части корпуса имеется направляющая трубка с насаженной на неё
индукционной катушкой, закрытой кожухом. Под кожухом имеется регулировочная
гайка, вращением которой производится перемещение индукционной катушки при
градуировке ротаметра. На верхнем конце трубки закреплён плунжер индукционного
датчика. Под действием потока измеряемого вещества поплавок перемещается вверх
и увлекает за собой плунжер индукционного датчика. Перемещение плунжера
приводит к разбалансу дифференциально-трансформаторной схемы, и на вторичный
прибор поступает сигнал, пропорциональный измеряемому расходу.
В комплекте с ротаметрами электрическими в качестве вторичных приборов
применяются приборы с дифференциально-трансформаторной системой передачи
показаний.
Ротаметры с пневматической дистанционной передачей и местной шкалой
показаний типов РП, РПО, ПРФ являются шкальными приборами для измерения расхода
жидкостей и преобразования его в унифицированный пневматический выходной сигнал
0,02…0,1 МПа, передаваемый на вторичный прибор.
Перемещение сердечника в ротаметре, жёстко связанном с поплавком, через
магнитную муфту и систему рычагов, позволяет получить местные показания, а
также передаётся к управляющему элементу пневмодатчика, где преобразуется в
пневматический сигнал. Значение этого сигнала передаётся на вторичный прибор и
отражается перемещением стрелки на шкале прибора. Шкала прибора 100%-ная
условная. Ротаметры градуируются заводом-изготовителем только по воде при
нормальной температуре 20 ± 5 °С. В паспорте прибора помещаются кривые расхода
по шкале и по пневмосигналу. Минимальный расход, измеряемый этими ротаметрами,
равен 20% максимального. Питание приборов осуществляется сжатым воздухом,
давлением 0,14 МПа. Присоединение приборов всех типов - фланцевое. Вторичный
прибор может устанавливаться на расстоянии до 300 м от ротаметра.
При монтаже ротаметра следует предусмотреть обводную линию (байпас) с
запорными вентилями для возможного отключения прибора без перекрытия потока
жидкости в трубопроводе. Направление потока среды должно быть таким, чтобы она
входила в вертикальный патрубок и выходила из горизонтального (ротаметры РЭ) и
снизу вверх (ротаметры РС, РП, РПО). Ротаметры устанавливаются в строго
вертикальном положении (по отвесу) во избежание заклинивания поплавка или штока
возможно дальше от побудителей расхода.
Работы по наладке ротаметров состоят из индивидуального опробования и
собственно наладки систем измерения. При наладке систем измерения расхода
требуемую точность измерения проверяют сравнением показаний прибора систем
измерения с непосредственными измерениями расхода или данными, полученными
расчётом. При отклонениях показаний систем измерений от расчётных проверяют все
элементы смонтированной схемы, включая линии связи, устраняют неисправности и
повторно включают систему в работу.
Налаженные системы измерения в большинстве случаев проходят испытания на
точную безаварийную работу в течение определённого времени, обычно не более
трёх суток. В процессе испытаний проводятся эксплуатационные операции с
приборами: контроль работы, смазка, продувка мест отбора импульсов, заправка
чернилами и т.п. [36].
4.5.3 Электромагнитные расходомеры
Принцип действия расходомера основан на явлении электромагнитной индукции
(рис. 4.43). Т.е. в проводнике, пересекающем силовые линии магнитного поля,
индуцируется ЭДС, пропорциональная скорости движения проводника. При этом
направление тока, возникающего в проводнике, перпендикулярно к направлению
движения проводника и направлению магнитного поля. Это известный закон
электромагнитной индукции - закон Фарадея.
Если электропроводная жидкость движется в магнитном поле, создаваемом
электромагнитной системой 1, то между электродами 2 возникает ЭДС:
= BvD , (4.34)
где B - индукция магнитного поля, создаваемого электромагнитной системой;
v - средняя скорость потока жидкости; D - расстояние между электродами. Обычно
B и D являются постоянными величинами, поэтому ЭДС Е зависит только от средней
скорости потока жидкости, а значит и объёмного расхода жидкости.
Достоинства электромагнитных расходомеров:
а) измерение не зависит от физических свойств жидкости (плотности,
вязкости, удельной электрической проводимости - при условии, что она выше
некоторой минимальной величины порядка нескольких мкСм/см);
б) измерение практически не зависит от распределения скорости в
трубопроводе, что позволяет, в случае необходимости, размещать расходомер
вблизи местных сопротивлений (колен, задвижек и т.п.);
в) в зоне измерений не происходит потери напора, так как сечение
трубопровода ничем не загромождается;
г) отсутствие у расходомера подвижных изнашиваемых элементов;
д) коррозионная стойкость расходомера (например, в случае кислот),
обеспечиваемая выбором соответствующего внутреннего покрытия (тефлон, эмаль,
стекло) и материала электродов (титан, платина).
Расходомеры незаменимы в тех процессах автоматического регулирования, где
запаздывание играет существенную роль, или при измерении быстро меняющихся
расходов [36].
4.5.4
Ультразвуковые расходомеры
Принцип действия времяимпульсных ультразвуковых расходомеров основан на
времяимпульсном методе измерения расхода. При реализации этого метода
ультразвуковые импульсы поочерёдно передаются вверх и вниз по течению потока.
Разность времён распространения пропорциональна скорости течения потока.
В состав прибора входят (рис. 4.44):
• два первичных ультразвуковых преобразователя расхода, состоящих из двух
пар пьезоэлектрических преобразователей (ПЭП), установленных на трубопроводе
условным диаметром 15…1800 мм;
• вторичный преобразователь - электронный блок.
Пьезоэлектрические преобразователи ПЭП1 и ПЭП2 работают попеременно в
режиме приёмник-излучатель.
Прямой цикл. Излучающий пьезопреобразователь под воздействием
электрического возбуждения испускает плоскую ультразвуковую волну. Эта волна
проходит сквозь поток жидкости и принимается приёмным пьезопреобразователем,
который преобразует полученные акустические вибрации в электрические сигналы.
Расходомер анализирует принятый сигнал и регистрирует точно измеренное время
прохождения акустической волны от излучающего до приёмного преобразователя.
Обратный цикл. Последовательность передачи-приёма сигнала предыдущего
цикла повторяется, но функции излучающего и приёмного преобразователей меняются
местами. Таким образом, теперь поток жидкости пересекает ультразвуковую волну в
противоположном направлении. Расходомер снова регистрирует точное время
прохождения импульса.
Поток материала будет влиять на измеренное время прохождения точно так
же, как ветер влияет на время полёта самолета, «подталкивая» его, или течение
воды на скорость пловца.
Расходомер вычитает время прохождения обратного цикла из времени
прохождения прямого цикла, и полученная в результате разность сигналов будет
пропорциональна потоку движущейся жидкости.
Скорость распространения ультразвукового сигнала в среде, заполняющей
трубопровод, представляет собой сумму скоростей ультразвука в неподвижной воде
и скорости потока воды v в проекции на рассматриваемое направление
распространения ультразвука. Время распространения ультразвукового импульса от ПЭП1
к ПЭП2 и от ПЭП2 к ПЭП1 зависит от скорости движения среды в соответствии с
формулами (4.35) и (4.36):
 (4.35)
(4.35)
 (4.36)
(4.36)
где t1, t2 - время распространения ультразвукового
импульса по потоку и против потока; L - длина активной части акустического
канала; С0 - скорость ультразвука в неподвижной среде; v - скорость
движения воды в трубопроводе; α.
В приборе используется метод прямого измерения времени распространения
каждого индивидуального ультразвукового импульса от одного ПЭП к другому.
Из формул (4.35) и (4.36) получаем
 (4.37)
(4.37)
где ∆t - разность времени распространения ультразвуковых импульсов
по потоку и против потока.
Умножив среднюю скорость потока v на сечение трубопровода, получим
значение расхода среды Q, протекающего на месте установки ПЭП
 (4.38)
(4.38)
где D - внутренний диаметр трубопровода на месте установки ПЭП; K -
коэффициент коррекции. Для обеспечения на всём диапазоне измерений погрешности
±2% необходимы специальные меры, требующие значительных затрат. В качестве
источников ультразвуковых колебаний применимы пьезоэлектрические материалы
(кварц, титанат бария, цирконат свинца).
Диапазон применяемых частот 0,5…10 МГц. Для получения точности 1% на всём
диапазоне, а также при очень малых скоростях потоков (0,1…0,5 м/с) следует
выбирать способ измерения, обеспечивающий независимость результатов от скорости
распространения ультразвука в данной среде или использовать схемы температурной
компенсации, гарантирующие высокую точность [36].
4.5.5 Расходомеры переменного уровня (щелевые
расходомеры)
Щелевые расходомеры (дозаторы) основаны на зависимости уровня жидкости в
сосуде от расхода при свободном истечении ее через калиброванное отверстие
(щель) в дне или боковой стенке. Профиль и диаметр отверстия рассчитываются
таким образом, чтобы указанная зависимость была линейной. Их используют для
измерения расхода агрессивных, загрязнённых или многофазных жидкостей.
Щелевые дозаторы предусмотрены для измерения расхода свободно протекающих
жидкостей, их нельзя устанавливать на линиях под избыточным давлением. Дозаторы
типов РМ и ДРЩ-Т выпускают на максимальные расходы до 50 м3/ч, они
имеют погрешность измерения расхода до 3% от номинального значения.
Дозаторы ДРЩ-Т (рис. 4.45) устанавливают в наивысшей точке трубопровода,
по которому протекает жидкость без давления, в противном случае расход
изменяемой среды не может быть измерен.
Корпус 1 должен быть установлен строго по уровню и отвесу, так как любое
отклонение перегородки с профильной щелью 2 от вертикали вызовет погрешность в
показаниях прибора, точность и линейность измерения которого определяются
профилем щели и уровнем жидкости над нижней границей щели. Так как уровень измеряемой
жидкости определяют с помощью пьезометрической трубки 3, то для регулирования
расхода питающего воздуха должны быть предусмотрены регулятор расхода воздуха и
ротаметр или другой расходомер. Питающая линия 5 должна быть врезана в систему
измерения непосредственно в месте соединения пьезотрубки 3 прибора с
измерительной трассой пневмопреобразователя [36].
4.5.6 Тепловые расходомеры
Тепловой расходомер основан на нагреве потока жидкости или газа
посторонним источником энергии, создающим в потоке разность температур,
зависящую от скорости потока и от расхода тепла в нагревателе. Разница
температур между этими датчиками зависит от массового расхода. Как правило,
расходомеры подобного типа состоят из двух температурных датчиков, один из
которых смонтирован выше по потоку, а другой - ниже по потоку по отношению к
нагревателю.
Два датчика температуры включены в соседние плечи моста Уитстона. Если
расход материала в трубопроводе равен нулю, то материал в трубопроводе
разогревается симметрично относительно нагревателя, и сопротивления
терпопреобразователей ТП1 и ТП2 одинаковы. Мостовая схема уравновешена и
показания вторичного прибора равны нулю. Как только возникает движение
материала в трубопроводе, равновесие нарушается. Термопреобразователь ТП1
окажется более холодным, чем ТП2. Их сопротивления также будут различаться.
Разница потенциалов разбаланса моста является мерой разности температур
и, следовательно, массового расхода жидкости. Такие приборы применяются для
измерения малых расходов газовых потоков и жидкостей в диапазоне 2,5×10-10 г/с...5×10-3 кг/с с точностью ±1%.
Для измерения больших расходов можно использовать байпасную (обводную) линию,
геометрические параметры выбирают такими, чтобы расход через датчик составлял
постоянную часть от общего расхода [36].
4.5.7 Вихревые расходомеры
Вихревой расходомер - это расходомер, основанный на зависимости от
расхода частоты образования вихрей, возникающих в потоке в процессе обтекания
тела.
Когда поток жидкости обтекает тело, слои жидкости, прилегающие к поверхности
тела, замедляются. Для обтекаемого тела эти пограничные слои следуют за
контуром тела до места их встречи за объектом. В этом случае в потоке возникают
небольшие возмущения. Для плохо обтекаемых тел пограничные слои отрываются от
тела намного раньше и создают большие возмущения в потоке. Когда пограничный
слой отходит от поверхности тела, он закручивается в вихри. Эти вихри,
называемые вихрями Кармана, генерируются попеременно с верхней и нижней
поверхности тела (рис. 4.47). В результате возникают два параллельных ряда
вихрей, движущихся вниз по потоку с одинаковым расстоянием между вихрями в
каждом ряду. Количество вихрей, генерируемое в секунду f от каждой стороны
поверхности обтекаемого тела, можно определить как
 (4.39)
(4.39)
где vs - средняя скорость жидкости вблизи плохо обтекаемого
тела; S -фактически постоянная величина, называемая числом Струхаля. Поток
жидкости тела протекает через площадь, равную
 (4.40)
(4.40)
где D - диаметр трубы. Предполагается, что тело имеет прямоугольную
поверхность поперечного сечения шириной d, расположенную в диаметральной
плоскости трубы, и его эффективная площадь равна примерно Fd.
Скорость vs в этом месте определяется скоростью v на некотором
удалении от тела, и объёмный расход Q может быть определен как
 (4.41)
(4.41)
следовательно
 (4.42)
(4.42)
Имеется много методов для измерения частоты вихрей. Например, можно
измерять давление потока за обтекаемым телом. При возникновении вихря
статическое давление уменьшается. Таким образом, по частоте изменения давления,
измеряемым кварцевым пьезоэлементом, можно судить о частоте вихрей, а значит и
о расходе вещества.
В другом методе вихри оказывают воздействие на луч ультразвуковой волны.
Этот метод реализован в вихреакустических расходомерах (рис. 4.48).
Преобразователь в этом случае представляет собой моноблочную конструкцию,
состоящую из проточной части и электронного блока. В корпусе проточной части
расположены: тело обтекания призма трапецеидального сечения 1, пьезоизлучатели
(ПИ) 2, пьезоприёмники (ПП) 3 и термодатчик 7.
Электронный блок включает в себя генератор 4, фазовый детектор 5, микропроцессорный
адаптивный фильтр с блоком формирования выходных сигналов 6, смонтированные на
печатной плате.
Тело обтекания (ТО) установлено на входе жидкости в проточную часть. При
обтекании ТО потоком жидкости за ним образуется вихревая дорожка, частота следования
вихрей в которой с высокой точностью пропорциональна скорости потока, а,
следовательно, и расходу.
За ТО в корпусе проточной части диаметрально противоположно друг другу
установлены стаканчики, в которых собраны ультразвуковой пьезоизлучатель (ПИ) и
пьезоприёмник (ПП).
В зависимости от типа, преобразователи имеют два конструктивных
исполнения:
) однолучевые преобразователи - одна пара ПИ, ПП (Dу 25-200 мм);
) двухлучевые преобразователи - две пары ПИ, ПП (Dу 250-300 мм).
От генератора на ПИ подаётся переменное напряжение, которое преобразуется
в ультразвуковые колебания. При прохождении через поток, в результате
взаимодействия с вихрями, ультразвуковые колебания модулируются по фазе. На ПП
модулированные ультразвуковые колебания вновь преобразуются в напряжение,
которое подаётся на фазовый детектор. На фазовом детекторе определяется
разность фаз между: сигналами с ПП и опорного генератора для однолучевых
преобразователей.
Напряжение на выходе фазового детектора по частоте и амплитуде
соответствует частоте и интенсивности следования вихрей, которая, в силу
пропорциональности скорости потока, является мерой расхода.
Вихревые расходомеры применяются и для жидкостей, и для газов. Они не
чувствительны к изменениям плотности, температуры или давления, имеют точность
±1% и используются при давлении до 10 МПа и температуре до 200 °С [36].
.5.8 Кориолисовы расходомеры
Законами механики установлено, что на массу m, движущуюся со скоростью  относительно системы отсчёта, находящейся
во вращательном движении с угловой скоростью
относительно системы отсчёта, находящейся
во вращательном движении с угловой скоростью  , действует сила
, действует сила  , называемая силой Кориолиса (Г.
Кориолис (1792 - 1843) - французский физик).
, называемая силой Кориолиса (Г.
Кориолис (1792 - 1843) - французский физик).
Появление кориолисовой силы можно обнаружить на следующем примере.
Возьмем горизонтально расположенный диск, который может вращаться вокруг
вертикальной оси. Прочертим на диске радиальную прямую ОА (рис. 4.49).
Запустим в направлении от О к А шарик со скоростью . Если диск не вращается, шарик
должен катиться вдоль ОА. Если же диск привести во вращение в направлении,
указанном стрелкой, то шарик будет катиться по кривой ОВ, причем его скорость
относительно диска быстро изменяет свое направление. Следовательно, по
отношению к вращающейся системе отсчета шарик ведет себя так, как если бы на
него действовала сила fc , перпендикулярная направлению движения
шарика.
Сила Кориолиса не является «настоящей» в смысле
механики Ньютона. При рассмотрении движений относительно инерциальной системы
отсчета такая сила вообще не существует. Она вводится искусственно при
рассмотрении движений в системах отсчета, вращающихся относительно
инерциальных, чтобы придать уравнениям движения в таких системах формально
такой же вид, что и в инерциальных системах отсчета.
Чтобы заставить шарик катиться вдоль ОА, нужно сделать направляющую,
выполненную в виде ребра. При качении шарика направляющее ребро действует на
него с некоторой силой. Относительно вращающейся системы (диска), шарик движется
с постоянной по направлению скоростью. Это можно объяснить тем, что эта сила
уравновешивается приложенной к шарику силой инерции:
 , (4.43)
, (4.43)
где  - масса; - скорость относительно принятой системы отсчета; -угловая скорость вращения диска.
- масса; - скорость относительно принятой системы отсчета; -угловая скорость вращения диска.
Сила Кориолиса вызывает кориолисово ускорение. Выражение для этого
ускорения имеет вид
 . (4.44)
. (4.44)
Ускорение направлено перпендикулярно векторам и и максимально, если относительная
скорость точки ортогональна угловой скорости вращения подвижной системы
отсчета. Кориолисово ускорение равно нулю, если угол между векторами и и равен нулю или π,
либо если хотя бы один
из этих векторов равен нулю.
Следовательно, в общем случае, при использовании уравнений Ньютона во
вращающейся системе отсчета, возникает необходимость учитывать центробежную,
центростремительную силы инерции, а также кориолисову силу.
Таким образом, всегда лежит в плоскости, перпендикулярной к оси вращения.
Сила Кориолиса возникает только в случае, когда тело изменяет свое положение по
отношению к вращающейся системе отсчета.
Эта закономерность является основой принципа действия расходомеров.
Жидкость, массовый расход Q которой необходимо измерить, течёт со
скоростью v через измерительную трубку U-образной формы (4.50). Трубку приводят
в колебательное движение относительно оси ОО', перпендикулярной рукавам
U-образной трубки; мгновенная угловая скорость трубки равна W. При отсутствии
расхода жидкости оба рукава трубки колеблются синфазно, т.е. угол Ɵ
поворота трубки равен нулю. При ненулевом расходе жидкости возникает сила
Кориолиса, которая действует на рукава трубки в разных направлениях, так как
жидкость течёт в них в разные стороны.
В результате рукава колеблются со сдвигом по фазе. Величину этого сдвига
можно определить по сигналам преобразователей перемещения, укреплённых на
рукавах трубки. В расходомере Метран-360 для этой цели применяют индуктивные
преобразователи перемещений.
А в качестве устройства возбуждения колебаний применяют электромагнит
переменного тока. Колебания трубки происходят на её собственной частоте,
которая зависит от массы трубки вместе с находящейся в ней жидкостью. Так как
объём трубки всегда постоянный, то масса трубки однозначно зависит от плотности
заполняющей её среды.
Таким образом, по частоте колебаний трубки можно определить плотность,
находящейся в ней жидкости.
Погрешность измерения расхода составляет 0,25%. Абсолютная погрешность
измерения плотности составляет ±2…3 кг/м3. Недостатком таких
расходомеров является высокая стоимость.
В России одним из основных прозводителей расходомеров подобного типа
являются предприятия ПГ «Метран». На рис. 4.51 показан внешний вид современного
кариолисового расходомера Метран-360 [37].
Глава 5. МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ ВИБРАЦИИ
5.1 Методы измерения
вибрации
Вибрация - это механические колебания тела.
Самый простой вид вибрации - это колебание или повторяющееся движение
объекта около положения равновесия. Этот тип вибрации называется общей
вибрацией, потому что тело перемещается как единое целое и все его части имеют
одинаковую по величине и направлению скорость. Положением равновесия называют
такое положение, в котором тело находится в состоянии покоя или положение
которое оно займет, если сумма действующих на него сил равна нулю.
Колебательное движение твердого тела может быть полностью описано в виде
комбинации шести простейших типов движения: поступательного в трех взаимно
перпендикулярных направлениях (х, у, z в декартовых координатах) и
вращательного относительно трех взаимно перпендикулярных осей (Ох, Оу, Оz).
Любое сложное перемещение тела можно разложить на эти шесть составляющих.
Поэтому о таких телах говорят, что они имеют шесть степеней свободы.
Например, корабль может перемещаться в направлении оси
"корма-нос" (прямо по курсу), подниматься и опускаться вверх-вниз,
двигаться в направления оси правый борт - левый борт, а также вращаться
относительно вертикальной оси и испытывать бортовую и килевую качку.
Представим себе некий объект, перемещения которого ограничены одним
направлением, например, маятник настенных часов. Такая система называется
системой с одной степенью свободы, т.к. положение маятника в любой момент
времени может быть определено одним параметром - углом в точке закрепления.
Другим примером системы с одной степенью свободы является лифт, который может
перемещаться только вверх и вниз вдоль ствола шахты.
Вибрация тела всегда вызывается какими-то силами возбуждения. Эти силы
могут быть приложены к объекту извне или возникать внутри него самого. Далее мы
увидим, что вибрация конкретного объекта полностью определяется силой
возбуждения, ее направлением и частотой. Именно по этой причине вибрационный анализ
позволяет выявить силы возбуждения при работе машины. Эти силы зависят от
состояния машины, и знание их характеристик и законов взаимодействия позволяет
диагностировать дефекты последней.
Простейшее гармоническое колебание
Самыми простыми из существующих в природе колебательных движений являются
упругие прямолинейные колебания тела на пружине (рис.5.1).
Такая механическая система обладает одной степенью свободы. Если отвести
тело на некоторое расстояние от положения равновесия и отпустить, то пружина
вернет его в точку равновесия. Однако тело приобретет при этом определенную
кинетическую энергию, проскочит точку равновесия и деформирует пружину в
противоположном направлении. После этого скорость тела начнет уменьшаться, пока
оно не остановится в другой крайней позиции, откуда сжатая или растянутая
пружина опять начнет возвращать тело назад в положение равновесия. Такой
процесс будет повторяться вновь и вновь, при этом происходит непрерывное
перетекание энергии от тела (кинетическая энергия) к пружине (потенциальная
энергия) и обратно.
Рис. 5.1. Пример простейшего колебания.
На рис.5.1 представлен также график зависимости перемещения тела от
времени. Если бы в системе отсутствовало трение, то эти колебания продолжались
бы непрерывно и бесконечно долго с постоянными амплитудой и частотой. В
реальных механических системах такие идеальные гармонические движения не
встречаются. Любая реальная система обладает трением, которое приводит к
постепенному затуханию амплитуды и превращает энергию колебаний в тепло.
Простейшее гармоническое перемещение описывается следующими параметрами: Т -
период колебаний, F - частота колебаний, = 1/Т.
Период колебаний - это интервал времени, который необходим для завершения
одного цикла колебания, то есть это время между двумя последовательными
моментами пересечения нулевой точки в одном направлении. В зависимости от
быстроты колебаний, период измеряют в секундах или миллисекундах.
Частота колебаний - величина обратная периоду, определяет количество
циклов колебания за период, она измеряется в герцах (1Гц= 1/секунду). Когда
рассматриваются вращающиеся машины, то частота основного колебания
соответствует частоте вращения, которая измеряется в об/мин (1/мин) и
определяется как:
автоматический регулирование ток датчик
 = F 60, (5.1)
= F 60, (5.1)
где F- частота в Гц, т.к. в минуте 60 секунд.
Уравнения колебаний
Если по вертикальной оси графика отложить положение (смещение) объекта,
испытывающего простые гармонические колебания, а по горизонтальной шкале -
время (см. рис.5.1), то результатом будет синусоида, описываемая уравнением:
=D sin(ω t), (5.2)
где d - мгновенное смещение;
D - максимальное смещение; ω= 2 F - угловая (циклическая) частота, =3,14.
F - угловая (циклическая) частота, =3,14.
Это та самая синусоидальная
кривая, которая всем хорошо известна из тригонометрии. Ее можно считать
простейшей и основной временной реализацией вибрации. В математике функция
синуса описывает зависимость отношения катета к гипотенузе от величины
противолежащего угла. Синусоидальная кривая при таком подходе является просто
графиком синуса в зависимости от величины угла. В теории вибраций
синусоидальная волна также является функцией времени, однако один цикл
колебания иногда рассматривают также как изменение фазы на 360 градусов. Об
этом мы еще поговорим подробнее при рассмотрении понятия фазы.
Упомянутая выше скорость
движения определяет быстроту изменения положения тела. Скорость (или быстрота)
изменения некоторой величины относительно времени, как известно из математики,
определяется производной по времени:
V =dn/dt=Dcos(ω
t), (5.3)
где n - мгновенная скорость.
Из этой формулы видно, что
скорость при гармоническом колебании также ведет себя по синусоидальному
закону, однако, вследствие дифференцирования и превращения синуса в косинус,
скорость сдвинута по фазе на 90 (то есть
на четверть цикла) относительно смещения.
(то есть
на четверть цикла) относительно смещения.
Ускорение - это скорость
изменения скорости:
a=dV /dt= ω -2 Dsin(ω t), (5.4)
где а - мгновенное ускорение.
Следует отметить, что
ускорение сдвинуто по фазе еще на 90 градусов, на что указывает отрицательный
синус (то есть на 180 градусов относительно смещения).
Из приведенных уравнений видно,
что скорость пропорциональна смещению, умноженному на частоту, а ускорение -
смещению, умноженному на квадрат частоты.
Это означает, что большие
смещения на высоких частотах должны сопровождаться очень большими скоростями и
чрезвычайно большими ускорениями. Представьте, например, вибрирующий объект,
который испытывает смещение 1 мм с частотой 100 Гц. Максимальная скорость
такого колебания будет равна смещению, умноженному на частоту:
V=1*100=100 мм/с . (5.5)
Ускорение равно смещению,
умноженному на квадрат частоты, или
а = 1 * (100)2 =
10000 мм с2 = 10 м/с2. (5.6)
Ускорение свободного падения
g равно 9,81 м/с2. Поэтому в единицах g полученное выше ускорение
приблизительно равно 10/9,811 g.
Теперь посмотрим, что
произойдет, если мы увеличим частоту до 1000 Гц
V=1 1000 =
1000 мм/с =1 м/с,
а = 1 (1000)2 = 1000000 мм/с2 = 1000
м/с2 = 100 g. (5.7)
Таким образом, мы видим, что
высокие частоты не могут сопровождаться большими смещениями, поскольку
возникающие в этом случае огромные ускорения вызовут разрушение системы.
Динамика механических систем
Небольшое компактное тело,
например кусочек мрамора, можно представить как простую материальную точку.
Если приложить к ней внешнюю силу, она придет в движение, которое определяется
законами Ньютона. В упрощенном виде, законы Ньютона гласят, что покоящееся тело
будет оставаться в покое, если на него не действует внешняя сила. Если же к
материальной точке приложена внешняя сила, то она придет в движение с
ускорением, пропорциональным этой силе.
Большинство механических
систем является более сложными, чем простая материальная точка, и они совсем не
обязательно будут перемещаться под воздействием силы как единое целое. Роторные
машины не являются абсолютно твердыми и отдельные их узлы имеют различные
жесткости. Как мы увидим далее, их реакция на внешнее воздействие зависит от
природы самого воздействия и от динамических характеристик механической
конструкции, причем эту реакцию очень тяжело предсказать. Проблемы
моделирования и предсказания реакции конструкций на известное внешнее
воздействие решаются с помощью метода конечных элементов (МКЭ) и модального
анализа. Здесь мы не будем подробно останавливаться на них, так как они
достаточно сложны, однако для понимания сущности вибрационного анализа машин
полезно рассмотреть, как взаимодействуют между собой силы и конструкции.
Измерения амплитуды вибрации
Для описания и измерения
механических вибраций используются следующие понятия:
· Максимальная амплитуда (Пик) - это максимальное
отклонение от нулевой точки, или от положения равновесия.
· Размах (Пик-Пик) - это разница между положительным и
отрицательным пиками. Для синусоидального колебания размах в точности равен
удвоенной пиковой амплитуде, так как временная реализация в этом случае
симметрична. Однако, как мы скоро увидим, в общем случае это неверно.
Среднеквадратическое значение
амплитуды (СКЗ) равно квадратному корню из среднего квадрата амплитуды
колебания. Для синусоидальной волны СКЗ в 1,41 раза меньше пикового значение,
однако такое соотношение справедливо только для данного случая.
СКЗ является важной
характеристикой амплитуды вибрации. Для ее расчета необходимо возвести в
квадрат мгновенные значения амплитуды колебаний и усреднить получившиеся величины
по времени. Для получения правильного значения, интервал усреднения должен быть
не меньше одного периода колебания. После этого извлекается квадратный корень и
получается СКЗ.
СКЗ должно применяться во
всех расчетах, относящихся к мощности и энергии колебания. Например, сеть
переменного тока 117 В (речь идет о северо-американском стандарте). 117 В - это
среднеквадратичное значение напряжения, которое применяется для расчета
мощности (Вт), потребляемой включенными в сеть приборами. Напомним еще раз, что
для синусоидального сигнала (и только для него) среднеквадратичная амплитуда
равна 0,707 х пик.
Понятие фазы
Фаза есть мера относительного
сдвига во времени двух синусоидальных колебаний. Хотя по своей природе фаза
является временной разностью, ее почти всегда измеряют в угловых единицах
(градусах или радианах), которые представляют собой доли цикла колебания и,
следовательно, не зависят от точного значения его периода.
Задержка 1/4 периода = сдвигу
по фазе на 90 градусов
Разность фаз двух колебаний
часто называют сдвигом фазы. Сдвиг фазы в 360 градусов представляет собой
временную задержку на один цикл, или на один период, что, по существу, означает
полную синхронность колебаний. Разность фаз в 90 градусов соответствует сдвигу
колебаний на 1/4 цикла друг относительно друга и т.д. Сдвиг фазы может быть
положительным либо отрицательным, то есть одна временная реализация может
отставать от другой или, наоборот, опережать ее.
Фазу можно также измерять по
отношению к конкретному моменту времени. Примером этого является фаза
дисбалансовой компоненты ротора (тяжелого места), взятая относительно положения
какой-то его фиксированной точки. Для измерения этой величины необходимо
сформировать прямоугольный импульс, соответствующий определенной опорной точке
на валу. Этот импульс может генерироваться тахометром или любым другим
магнитным или оптическим датчиком, чувствительным к геометрическим или световым
неоднородностям на роторе, и называется иногда тахоимпульсом. Измеряя задержку
(опережение) между циклической последовательностью тахоимпульсов и вибрацией,
вызванной дисбалансом, мы тем самым определяем и их фазовый угол.
Фазовый угол может измеряться
относительно опорной точки как в направлении вращения, так и в направлении,
противоположном вращению, т.е. либо как фазовая задержка, либо как фазовое
опережение. Различные производители оборудования используют как тот, так и
другой подходы.
Единицы измерения вибрации
До сих пор мы рассматривали
вибросмещение как меру амплитуды вибрации. Вибросмещение равно расстоянию от
точки отсчета, или от положения равновесия. Помимо колебаний по координате
(смещение), вибрирующий объект испытывает также колебания скорости и ускорения.
Скорость представляет собой быстроту изменения координаты и обычно измеряется в
м/с. Ускорение есть скорость изменения скорости и обычно измеряется в м/с2
или в единицах g (ускорение свободного падения).
Как мы уже видели, графиком
смещения тела, испытывающего гармонические колебания, является синусоида. Мы
показали также, что и виброскорость в этом случае подчиняется синусоидальному
закону. Когда смещение максимально, скорость равна нулю, так как в этом
положении происходит изменение направления движения тела. Отсюда следует, что
временная реализация скорости будет сдвинута по фазе на 90 градусов влево
относительно временной реализации смещения. Другими словами, скорость опережает
по фазе смещение на 90 градусов.
Вспомнив, что ускорение - это
скорость изменения скорости, легко, по аналогии с предыдущим, понять, что
ускорение объекта, испытывающего гармонического колебания, также синусоидально
и равно нулю, когда скорость максимальна. И наоборот, когда скорость равна
нулю, ускорение максимально (скорость изменяется наиболее быстро в этот
момент). Таким образом, ускорение опережает по фазе скорость на 90 градусов.
Существует еще один
вибрационный параметр, а именно, быстрота изменения ускорения, называемая
резкостью (jerk).
Резкость - это то внезапное
прекращение замедления в момент остановки, которое вы ощущаете, когда тормозите
на автомобиле, не отпуская педаль тормоза. В измерении этой величины
заинтересованы, например, производители лифтов, потому что пассажиры лифтов
чувствительны именно к изменению ускорения.
Краткая справка по единицам
измерения амплитуды
В англоязычных странах
вибросмещение обычно измеряют в миллидюймах (1/1000 дюйма; 1 дюйм = 2,54 см), и
по традиции применяют значение "peak-to-peak" (размах). В европейских
странах принята международная система единиц и вибросмещение измеряют в
микрометрах (мкм).
Виброскорость обычно измеряют
в м/с или в мм/с, в англоязычных странах - дюйм/с (ips). При измерении
виброскорости используются как СКЗ, так и пиковое значения. В некоторых
странах, например, в США, в силу давней традиции, пиковое значение является
более употребительным.
Виброускорение обычно
измеряют в единицах g СКЗ (g - ускорение свободного падения). В
действительности g не является системной единицей - это просто то ускорение,
которое мы испытываем, находясь на Земле. Стандартными единицами измерения
ускорения являются м/с2, а в англоязычных странах - дюйм/c2.
1g=9.81м/с2.
Процесс преобразования
смещения в скорость или скорости в ускорение эквивалентен математической
операции дифференцирования. Обратное преобразование ускорения в скорость и
скорости в смещение называется интегрированием. Сегодня можно проводить эти
операции внутри самих измерительных приборов и легко переходить от параметров
измерения к другим.
На практике, однако,
дифференцирование приводит к росту шумовой составляющей сигнала, и поэтому оно
редко применяется. Интегрирование, напротив, может быть осуществлено с высокой
точностью с помощью простых электрических цепей. Это является одной из причин,
почему акселерометры сегодня стали основными датчиками вибрации: их выходной
сигнал можно легко подвергнуть однократному или двухкратному интегрированию и
получить либо скорость, либо смещение. Интегрирование, однако, непригодно для
сигналов с очень низкой частотой (ниже 1 Гц), так как в этой области уровни
паразитного шума чрезвычайно увеличиваются и точность интегрирования падает. Большинство
имеющихся на рынке интеграторов правильно работают на частотах выше 1 Гц, что
достаточно почти для всех приложений, связанных с вибрациями. Смещение,
скорость и ускорение
Как отмечалось выше,
вибрационный сигнал смещения на определенной частоте может быть преобразован в
скорость посредством дифференцирования. Дифференцирование сопровождается
умножением амплитуды на частоту, поэтому амплитуда виброскорости на
определенной частоте пропорциональна смещению, умноженному на эту частоту. При
фиксированном смещении, скорость будет удваиваться с удвоением частоты, а если
частота увеличится в десять раз, то и скорость умножится на десять.
Чтобы получить из скорости
ускорение, необходимо еще одно дифференцирование, а, значит, и еще одно
умножение на частоту. Поэтому, ускорение при фиксированном смещении будет
пропорционально квадрату частоты.
Проиллюстрируем это на
следующем примере: вы без труда можете махать рукой, отводя ее вперед и назад
на 30 см, делая один цикл в одну секунду, т.е. с частотой 1 Гц. Вероятно, вы
сможете осуществлять движения с такой амплитудой в 5 или 6 раз быстрее, то есть
с частотой 5-6 Гц. Однако представьте себе, насколько быстро должна двигаться
ваша рука, чтобы проходить туда и обратно то же самое расстояние с частотой 100
Гц или 1000 Гц.
А теперь представьте себе,
какую силу вам придется приложить для этого. По второму закону Ньютона, сила
равна массе, умноженной на ускорение. Поэтому при заданном смещении сила также
пропорциональна квадрату частоты. Именно по этой причине мы никогда не
сталкиваемся с процессами, где большие ускорения сопровождаются большими
смещениями. На практике просто не существует таких огромных сил, которые
требуются для этого, а если бы они нашлись, то были бы крайне разрушительны.
Исходя из этих простых рассуждений,
легко понять, что одни и те же вибрационные данные, представленные в виде
графиков смещения, скорости или ускорения будут выглядеть по-разному. На
графике смещения будет усилена низкочастотная область, а на графике ускорения -
высокочастотная при ослаблении низкочастотной.
Величины смещения, скорости и
ускорения в стандартных международных единицах связаны следующими уравнениями:
 (5.8)
(5.8)
 (5.9)
(5.9)
 (5.10)
(5.10)
На приведенном рисунке один и
тот же вибрационный сигнал представлен в виде виброперемещения, виброскорости и
виброускорения.
Рис. 5.7. Представление
одного вибросигнала в виде виброперемещения, виброскорости и виброускорения.
Обратим внимание, что график
смещения очень трудно анализировать на высоких частотах, зато высокие частоты
хорошо видны на графике ускорения. Кривая скорости наиболее равномерно по
частоте среди этих трех. Это типично для большинства роторных машин, однако в
некоторых ситуациях самыми равномерными являются кривые смещения или ускорения.
Лучше всего выбирать такие единицы измерения, для которых частотная кривая
выглядит наиболее плоской: тем самым обеспечивается максимум визуальной
информации для наблюдателя. Для диагностики машин наиболее часто применяют
виброскорость.
Сложная вибрация
Вибрация есть движение,
вызванное колебательной силой. У линейной механической системы частота вибрации
совпадает с частотой возбуждающей силы. Если в системе одновременно действуют
несколько возбуждающих сил с разными частотами, то результирующая вибрация
будет суммой вибраций на каждой частоте. При этих условиях результирующая
временная реализация колебания уже не будет синусоидальной и может оказаться
очень сложной.
В простых случаях, подобных
этому, достаточно легко определить частоты и амплитуды отдельных компонент,
анализируя форму временного графика (временную реализацию) сигнала, однако
большинство вибрационных сигналов значительно сложнее, и их гораздо труднее
интерпретировать. Для типичной роторной машины часто весьма сложно извлечь
необходимую информацию о ее внутреннем состоянии и работе, изучая лишь
временные реализации вибрации, хотя в некоторых случаях анализ последних
является достаточно мощным инструментом, о чем поговорим далее в разделе о
мониторинге вибраций машин.
Энергия и мощность
Для возбуждения вибрации
необходимо затратить энергию. В случае вибрации машин эта энергия генерируется
двигателем самой машины. Таким источником энергии может быть сеть переменного
тока, двигатель внутреннего сгорания, паровая турбина и т.д. В физике энергия
определяется как способность совершать работу, а механическая работа есть
произведение силы на расстояние, на котором действовала эта сила. Единица
измерения энергии и работы в международной системе (СИ) - Джоуль. Один Джоуль
эквивалентен силе в один Ньютон, действующей на расстоянии в один метр.
Доля энергии машины,
приходящаяся на вибрацию, обычно не очень велика, по сравнению с полной
энергией, необходимой для работы машины.
Мощность есть работа,
выполняемая в единицу времени, или энергия, затрачиваемая в единицу времени. В
системе СИ мощность измеряется в Ваттах, или в Джоулях в секунду. Мощность в
одну лошадиную силу эквивалентна 746 Ваттам. Мощность вибрации пропорциональна
квадрату амплитуды колебаний (аналогично, электрическая мощность
пропорциональна квадрату напряжения или тока).
В соответствии с законом
сохранения энергии, энергия не может возникать из ничего или исчезать в никуда:
она переходит из одной формы в другую. Энергия вибраций механической системы
постепенно диссипирует (то есть переходит) в тепло.
При анализе вибрации более
или менее сложного механизма полезно рассмотреть источники вибрационной энергии
и пути, по которым эта энергия передается внутри машины. Энергия всегда
движется от источника вибрации к поглотителю, в котором она превращается в
тепло. Иногда этот путь может быть очень коротким, однако в других ситуациях
энергия может пропутешествовать на большие расстояния, прежде чем поглотится.
Важнейшим поглотителем
энергии машины является трение. Различают трение скольжения и вязкое трение.
Трение скольжение возникает вследствие относительного перемещения различных
частей машины друг относительно друга. Вязкое трение создается, например,
пленкой масляной смазки в подшипнике скольжения. Если трение внутри машины
мало, то ее вибрация обычно велика, т.к. из-за отсутствия поглощения энергия
вибраций накапливается. Например, машины с подшипниками качения, называемыми
иногда антифрикционными, обычно вибрируют сильнее, чем машины с подшипниками
скольжения, в которых смазка действует как значительный поглотитель энергии.
Поглощением энергии вибраций вследствие трения объясняется также применение в
авиации заклепок вместо сварных соединений: клепаные соединения испытывают
небольшие перемещения друг относительно друга, благодаря чему поглощается
энергия вибраций. Тем самым предотвращается развитие вибрации до разрушительных
уровней. Подобные конструкции называют сильно демпфированными. Демпфирование -
это, по существу, мера поглощения энергии вибраций.
Собственные частоты
Любая механическая
конструкция может быть представлена в виде системы пружин, масс и демпферов.
Демпферы поглощают энергию, а массы и пружины - нет. Как мы видели в предыдущем
разделе, масса и пружина образуют систему, которая имеет резонанс на
характерной для нее собственной частоте. Если подобной системе сообщить энергию
(например, толкнуть массу или оттянуть пружину), то она начнет колебаться с собственной
частотой, а амплитуда вибрации будет зависеть от мощности источника энергии и
от поглощения этой энергии, т.е. демпфирования, присущего самой системе.
Собственная частота идеальной системы масса-пружина без демпфирования дается
соотношением:
 , (5.8)
, (5.8)
где Fn - cобственная
частота; k - коэффициент упругости (жесткость) пружины; m - масса.
Отсюда следует, что с
увеличением жесткости пружины увеличивается и собственная частота, а с
увеличением массы собственная частота падает. Если система обладает
демпфированием, а это так для всех реальных физических систем, то собственная
частота будет несколько ниже рассчитанного по приведенной выше формуле значения
и будет зависеть от величины демпфирования.
Множество систем пружина-масса-демпфер
(то есть простейших осцилляторов), которыми можно моделировать поведение
механической конструкции, называют степенями свободы. Энергия вибраций машины
распределяется между этими степенями свободы в зависимости от их собственных
частот и демпфирования, а также в зависимости от частоты источника энергии.
Поэтому вибрационная энергия никогда не распределена равномерно по всей машине.
Например, в машине с электродвигателем главным источником вибраций является
остаточный дисбаланс ротора двигателя. Это приводит к заметным уровням вибрации
на подшипниках двигателя. Однако если одна из собственных частот машины близка
к оборотной частоте ротора, то ее вибрации могут быть велики и на довольно
большом удалении от двигателя. Этот факт необходимо учитывать при оценке
вибрации машины: точка с максимальным уровнем вибрации не обязательно
располагается рядом с источником возбуждения. Вибрационная энергия часто
перемещается на большие расстояния, например, по трубам, и может вызвать
настоящее опустошение при встрече с удаленной конструкцией, чья собственная
частота близка к частоте источника.
Линейные и нелинейные системы
Для понимания механизма
передачи вибраций внутри машины важно усвоить понятие линейности и то, что
понимают под линейной или нелинейной системами. До сих пор мы пользовались
термином линейный лишь применительно к шкалам амплитуды и частоты. Однако этот
термин применяют также для описания поведения любых систем, имеющих вход и
выход. Системой мы называем здесь любое устройство или конструкцию, которые
могут воспринимать возбуждение в какой-либо форме (вход) и давать на него
соответствующий отклик (выход). В качестве примера можно привести магнитофоны и
усилители, преобразующие электрические сигналы, или механические конструкции,
где на входе мы имеем возбуждающую силу, а на выходе -вибросмещение, скорость и
ускорение.
Определение линейности
Систему называют линейной,
если она удовлетворяет двум следующим критериям:
Если вход х вызывает в
системе выход X, то вход 2х даст выход 2Х. Иными словами, выход линейной
системы пропорционален ее входу.
Если вход х дает выход X, а
вход у - выход Y, то вход х+у даст выход X+Y. Иными словами, линейная система
обрабатывает два одновременных входных сигнала независимо друг от друга, причем
они не взаимодействуют между собой внутри нее. Отсюда следует, в частности, что
линейная система не дает на выходе сигнал с частотами, отсутствовавшими во
входных сигналах.
Обратите внимание, что эти
критерии отнюдь не требуют, чтобы выход был аналоговым или сходным по своей
природе со входом. Например, на входе может быть электрический ток, а на выходе
- температура. В случае механических конструкций, в частности, машин, мы будем
рассматривать в качестве входа вибрационную силу, а в качестве выхода - саму
измеряемую вибрацию.
Нелинейные системы
Ни одна реальная система не
является абсолютно линейной. Существует большое разнообразие нелинейностей,
которые в той или иной степени присутствуют в любой механической системе, хотя,
многие из них ведут себя почти линейно, особенно при слабом входе. Не полностью
линейная система имеет на выходе частоты, которых не было на входе. Примером
этого являются стереоусилители или магнитофоны, которые генерируют гармоники
входного сигнала вследствие так называемого нелинейного (гармонического)
искажения, ухудшающего качества воспроизведения. Гармоническое искажение почти
всегда сильнее при высоких уровнях сигнала. Например, маленький радиоприемник
звучит довольно чисто при тихом уровне громкости, и начинает трещать при
усилении звука. Это явление проиллюстрировано ниже:
Многие системы имеют почти
линейный отклик на слабый входной сигнал, но становятся нелинейными при более
высоких уровнях возбуждения. Иногда существует определенный порог входного
сигнала, незначительное превышение которого ведет к сильной нелинейности.
Примером может служить отсечение сигнала в усилителе, когда входной уровень
превышает допустимый размах напряжения или тока блока питания усилителя.
Еще одним типом нелинейности
является взаимная модуляция, когда два или более входных сигнала
взаимодействуют друг с другом и производят новые частотные компоненты, или
модуляционные боковые полосы, отсутствовавшие в любом из них. Именно с
модуляцией связаны боковые полосы в спектрах вибрации.
Нелинейности роторных машин
Как мы уже упоминали,
вибрация машины - это, фактически отклик на силы, вызванные ее движущимися
частями. Мы измеряем вибрацию в разных точках машины и находим значения сил.
Измеряя частоту вибрации, мы предполагаем, что и вызывающие ее силы имеют те же
частоты, а ее амплитуда пропорциональна величине этих сил. То есть мы
предполагаем, что машина является линейной системой. В большинстве случаев
такое предположение разумно.
Однако по мере того, как
машина изнашивается, увеличиваются ее зазоры, появляются трещины и разболтанность
и т.д., ее отклик будет все больше отклоняться от линейного закона, и в
результате характер измеряемой вибрации может стать отличным от характера
возбуждающих сил.
Например, несбалансированный
ротор воздействует на подшипник с синусоидальной силой на частоте 1Х, и других
частот в этом возбуждении нет. Если механическая структура машины нелинейная,
то возбуждающая синусоидальная сила будет искажена, и в результирующем спектре
вибрации помимо частоты 1Х появятся ее гармоники. Количество гармоник в спектре
и их амплитуда являются мерой нелинейности машины. Например, по мере износа
подшипника скольжения в спектре его вибрации возрастает количество гармоник и
увеличиваются их амплитуда.
Гибкие соединения с
несоосностью являются нелинейными. Именно поэтому их вибрационные
характеристики содержат сильную вторую гармонику оборотной частоты (то есть
2Х). Износ муфты с несоосностью часто сопровождается сильной третьей гармоникой
оборотной частоты (3Х). Когда силы с разными частотами взаимодействуют внутри машины
нелинейным образом, возникает модуляция, и в спектре вибрации появятся новые
частоты. Эти новые частоты, или боковые полосы присутствуют в спектрах
дефектных зубчатых передач, подшипников качения и т.д. Если зубчатое колесо
имеет эксцентриситет или какую-то неправильную форму, то оборотная частота
будет модулировать частоту зацепления зубьев, приводя к боковым полосам в
спектре вибрации. Модуляция - это всегда нелинейный процесс, при котором
появляются новые частоты, отсутствовавшие в возбуждающей силе.
Резонанс
Резонансом называют такое
состояние системы, при котором частота возбуждения близка к собственной частоте
конструкции, то есть частоте колебаний, которые будет совершать эта система,
будучи предоставлена самой себе после выведения из состояния равновесия. Обычно
механические конструкции имеют множество собственных частот. В случае резонанса
уровень вибрации может стать очень высоким и привести к быстрому разрушению
конструкции.
Резонанс проявляется в
спектре в виде пика, положение которого остается постоянным при изменении
скорости машины. Этот пик может быть очень узким или, наоборот, широким, в
зависимости от эффективного демпфирования конструкции на данной частоте.
Для того, чтобы определить,
имеет ли машина резонансы, можно выполнить один из следующих тестов:
Тест-удар (bump test) - По
машине ударяют чем-нибудь тяжелым, например, киянкой, записывая при этом
вибрационные данные. Если машина имеет резонансы, то в ее затухающей вибрации
выделятся собственные частоты.
Разгон или Выбег - машину
включают (или отключают) и одновременно снимают вибрационные данные и показания
тахометра. Когда обороты машины приблизятся к собственной частоте конструкции,
на временной реализации вибрации появятся сильные максимумы.
Тест с вариацией скорости -
скорость машины меняют в широком диапазоне (если это возможно), снимая данные
вибрации и показания тахометра. Полученные данные затем интерпретируют так же,
как в предыдущем тесте. На рисунке приведена идеализированная кривая
механического резонансного отклика. Поведение резонирующей системы под
воздействием внешней силы, очень интересно и немного противоречит бытовой
интуиции. Оно строго зависит от частоты возбуждения.
Если эта частота ниже
собственной (то есть располагается слева от пика), то вся система будет вести себя
подобно пружине, в которой смещение пропорционально силе. В простейшем
осцилляторе, состоящем из пружины и массы, именно пружина будет определять
отклик на возбуждение такой силой. В этой частотной области поведение
конструкции будет совпадать с обыденной интуицией, откликаясь на большую силу
большим смещением, причем смещение будет находиться в фазе с силой.В области
справа от собственной частоты ситуация другая. Здесь масса играет определяющую
роль, и вся система реагирует на силу, грубо говоря, так, как это делала бы
материальная точка. Это означает, что пропорциональным приложенной силе будет
ускорение, а амплитуда смещения будет относительно неизменной с изменением
частоты.
Отсюда следует, что
вибросмещение будет в противофазе с внешней силой (так как оно в противофазе с
виброускорением): когда вы будете давить на конструкцию, она будет двигаться к
вам и наоборот!
Если частота внешней силы в
точности совпадает с резонансом, то система будет вести себя совершенно
по-другому. В этом случае реакции массы и пружины взаимоуничтожатся, и сила
будет видеть только демпфирование, или трение, системы. Если система является
слабо демпфированной, то внешнее воздействие будет подобно толканию воздуха.
Когда вы пробуете его толкнуть, он легко и невесомо уступает вам.
Следовательно, на резонансной частоте вы не сможете приложить к системе большую
силу, а если попытаетесь это сделать, то амплитуда вибрации достигнет очень
больших значений. Именно демпфирование управляет движением резонансной системы
на собственной частоте.
На собственной частоте сдвиг
фазы (фазовый угол) между источником возбуждения и откликом конструкции всегда
составляет 90 градусов.
У машин с длинными роторами,
например, турбин, собственные частоты называют критическими скоростями.
Необходимо следить, чтобы в рабочем режиме таких машин их скорости не совпадали
с критическими.
Тест-удар
Тест-удар - это хороший
способ найти собственные частоты машины или конструкции. Ударное тестирование
является упрощенной формой измерения подвижности, при которой не используется
динамометрический молоток, и поэтому величина прилагаемой силы не определяется.
Получающаяся в результате кривая не будет корректной в точном смысле. Однако
пики этой кривой будут соответствовать истинным значениям собственных частот,
что обычно достаточно для оценки вибрации машины.
Проведение Тест-удара с
помощью БПФ анализатора чрезвычайно просто. Если анализатор обладает встроенной
функцией отрицательной задержки, то ее триггер устанавливают на величину
порядка 10% длины временной записи. Затем по машине вблизи места расположения
акселерометра ударяют тяжелым инструментом с достаточно мягкой поверхностью.
Для удара можно использовать стандартный измерительный молоток или кусок
дерева. Масса молотка должна составлять около 10% массы испытываемой машины или
конструкции. Если это возможно, временное окно БПФ анализатора должно быть
экспоненциальным, чтобы обеспечить нулевой уровень сигнала в конце временной
записи.
Слева приведена типичная
кривая отклика на удар. При отсутствии в анализаторе функции задержки запуска
может быть использована немного другая методика. В этом случае выбирается окно
Ханна и задаются 8 или 10 усреднений. Затем запускают процесс измерений, а
одновременно хаотически ударяя молотком до тех пор, пока анализатор не закончит
измерения. Плотность ударов должна быть равномерно распределена во времени,
чтобы частота их повторения не появилась в спектре. Если используется
трехосевой акселерометр, то будут записываться собственные частоты по всем трем
осям.
В этом случае для возбуждения
всех мод колебаний убедитесь, что удары наносятся под 45 градусов ко всем осям
чувствительности акселерометра.
Частотный анализ
Чтобы обойти ограничения
анализа во временной области, обычно на практике применяют частотный, или
спектральный, анализ вибрационного сигнала. Если временная реализация есть
график во временной области, то спектр - это график в частотной области.
Спектральный анализ эквивалентен преобразованию сигнала из временной области в
частотную. Частота и время связаны друг с другом следующей зависимостью:
Время= 1/Частота
Частота= 1/Время
Расписание автобусов наглядно
выявляет эквивалентность представлений информации во временной и частотной
областях. Вы можете перечислить точные времена отправления автобусов (временная
область), а можете сказать, что они уходят каждые 20 минут (частотная область).
Та же самая информация значительно компактнее выглядит в частотной области.
Очень длинное расписание по времени сжимается до двух строчек в частотном виде.
Это очень показательно: события, занимающие большой интервал времени сжимаются
в частотной области до отдельных полос.
Для чего нужен частотный
анализ? Обратите внимание, что на приведенном рисунке, частотные составляющие
сигнала отделены друг от друга и явно выражены в спектре, а их уровни легко
идентифицировать. Эту информацию было бы очень непросто выделить из временной
реализации.
На следующем рисунке видно,
что события, перекрывающиеся друг с другом во временной области разделяются в
частотной области на отдельные компоненты.
Временная реализация вибрации
несет в себе большое количество информации, которая для невооруженного глаза
незаметна. Часть этой информации может приходиться на очень слабые компоненты,
величина которых может быть меньше, чем толщина линии графика. Тем не менее подобные
слабые компоненты могут быть важны для выявления развивающихся неисправностей в
машине, например, дефектов подшипников. Сама суть диагностики и обслуживания по
состоянию, заключается в раннем обнаружении зарождающихся неисправностей,
поэтому, необходимо обращать внимание и на чрезвычайно малые уровни
вибрационного сигнала.
Рис. 5.21. Спектр сигнала.
На приведенном спектре очень
слабая компонента представляет небольшую развивающуюся неисправность в
подшипнике, и она осталась бы незамеченной, если бы мы анализировали сигнал во
временной области, то есть ориентировались на общий уровень вибрации. Поскольку
СКЗ - это просто общий уровень колебания в широком частотном диапазоне, поэтому
небольшое возмущение на подшипниковой частоте может остаться незамеченным в
изменении уровня СКЗ, хотя для диагностики это возмущение очень важно.
Как выполняется частотный
анализ?
Прежде чем приступить к
процедуре выполнения спектрального анализа рассмотрим на различные типы
сигналов, с которыми предстоит работать.
С теоретической и
практической точек зрения можно разделить сигналы на несколько групп. Различным
типам сигналов соответствуют различные типы спектров, и во избежание ошибок при
выполнении частотного анализа, важно знать характеристики этих спектров.
Стационарный сигнал
В первую очередь все сигналы
делятся на стационарные и нестационарные. Стационарный сигнал имеет постоянные
по времени статистические параметры. Если вы посмотрите несколько мгновений на
стационарный сигнал и затем через какое-то время опять вернетесь к нему, то он
будет выглядеть, по существу, тем же самым, то есть его общий уровень,
распределение амплитуды и стандартное отклонение будут почти неизменными.
Роторные машины производят, как правило, стационарные вибрационные сигналы.
Стационарные сигналы
подразделяются далее на детерминированные и случайные. Случайные
(нестационарные) сигналы непредсказуемы по своему частотному составу и уровням
амплитуды, однако их статистические характеристики все-таки почти постоянны.
Примеры случайных сигналов - дождь, падающий на крышу, шум реактивной струи,
турбулентность в потоке газа или жидкости и кавитация.
Детерминированный сигнал
Детерминированные сигналы
представляют собой специальный класс стационарных сигналов. Они сохраняют
относительно постоянный частотный и амплитудный состав в течение длительного
периода времени. Детерминированные сигналы генерируются роторными машинами,
музыкальными инструментами и электронными генераторами. Они подразделяются в
свою очередь на периодические и квазипериодические. Временная реализация
периодического сигнала непрерывно повторяется через равные отрезки времени.
Частота повторения квазипериодической временной формы варьируется во времени,
однако на глаз сигнал кажется периодическим. Иногда роторные машины производят
квазипериодические сигналы, особенно это относится к оборудованию с ременной
передачей.
Детерминированные сигналы -
это, по-видимому, наиболее важный тип для анализа вибраций машин, а их спектры
схожи с приведенным здесь:
Периодические сигналы всегда
имеют спектр с дискретными частотными компонентами, называемыми гармониками или
гармоническими последовательностями. Сам термин гармоника пришел из музыки, где
гармоники - это целые кратные фундаментальной (опорной) частоты.
Нестационарный сигнал
Нестационарные сигналы
подразделяют на непрерывные и переходные. Примеры нестационарного непрерывного
сигнала - вибрация, производимая отбойным молотком или артиллерийская канонада.
Переходным, по определению, называют сигнал, начинающийся и заканчивающийся на
нулевом уровне и длящийся конечное время. Он может быть очень коротким или
довольно долгим. Примеры переходного сигналы - удар молотка, шум пролетающего
самолета или вибрация машины на разгоне и выбеге.
Примеры временных реализаций
и их спектров
Ниже приведены примеры
временных реализации и спектров, иллюстрирующих важнейшие понятия частотного
анализа. Хотя данные примеры в некотором смысле идеализированы, поскольку они
были получены с помощью электронного генератора сигналов с последующей
обработкой БПФ-анализатором. Тем не менее, они, определяют некоторые
характерные черты, присущие спектрам вибрации машин.
Синусоидальное колебание
содержит только одну частотную компоненту, а ее спектр - это единичная точка.
Теоретически, истинное синусоидальное колебание существует в неизменном виде
бесконечное время. В математике преобразование, переводящее элемент из
временной области в элемент частотной области, называют преобразованием Фурье.
Такое преобразование сжимает всю информацию, содержащуюся в синусоидальном
колебании бесконечной продолжительности до единственной точки. На приведенном
выше спектре единственный пик имеет конечную, а не нулевую ширину, что
обусловлено погрешностью применяемого алгоритма численного расчета, называемого
БПФ (см. далее).
В машине с дисбалансом ротора
возникает синусоидальная возбуждающая сила с частотой 1Х, то есть один раз за
один оборот. Если бы отклик такой машины был абсолютно линейным, то
результирующая вибрация была бы также синусоидальной и подобна приведенной выше
временной реализации. Во многих плохо сбалансированных машинах временная
реализация колебаний действительно напоминает синусоиду, а в спектре вибрации
имеется большой пик на частоте 1Х, то есть на оборотной частоте.
На следующем рисунке представлен
гармонический спектр периодического колебания типа обрезанной синусоиды.
Этот спектр состоит из
компонент, разделенных постоянным интервалом, равным 1/(период колебания).
Самая низшая из этих компонент (первая после нуля), называется основной, а все
остальные - ее гармониками. Такое колебание было получено с помощью генератора
сигналов, и, как видно из рассмотрения временного сигнала, оно несимметрично
относительно нулевой оси (положения равновесия). Это означает, что сигнал имеет
постоянную составляющую, превращающуюся в спектре в первую линию слева. Данный
пример иллюстрирует способность спектрального анализа воспроизводить частоты
вплоть до нулевой (нулевая частота соответствует постоянному сигналу или,
другими словами, отсутствию колебаний).
Как правило, при вибрационном
анализе машин нежелательно проводить спектральный анализ на таких низких
частотах по ряду причин. Большинство датчиков вибраций не обеспечивают
правильные измерения до 0 Гц, и только специальные акселерометры, применяемые,
например, в инерциальных навигационных системах, позволяют это делать. Для
машинных вибраций наименьшая представляющая интерес частота обычно составляет
0,3Х. В некоторых машинах это может быть ниже 1 Гц, Чтобы измерять и
интерпретировать сигналы ниже в диапазоне ниже 1 Гц необходимы специальные
методики.
При анализе вибрационных
характеристик машин не так уж редко приходится видеть временные реализации,
срезанные наподобие приведенной выше. Обычно это означает, что в машине
возникла какая-то разболтанность, и что-то ограничивает движение ослабленного
элемента в одном из направлений.
Показанный далее сигнал
аналогичен предыдущему, но срез в нем имеет место, как с положительной, так и с
отрицательной сторон.
В результате временной график
колебания (временная реализация) получается симметричным. Сигналы подобного
типа могут возникать в машинах, в которых движение ослабленных элементов
ограничено в обоих направлениях. В этом случае в спектре также будут спектр
периодического сигнала присутствовать гармонические составляющие, однако это
будут только нечетные гармоники. Все четные гармонические составляющие
отсутствуют. Любое периодическое симметричное колебание будет обладать похожим
спектром. Спектр сигнала квадратной формы также выглядел бы подобно этому.
Иногда похожий спектр
встречается в машине с очень сильной разболтанностью, в которой смещение
вибрирующих частей ограничено с каждой стороны. Примером этого является
разбалансированная машина с ослабленными затяжными болтами крепления.
Спектр короткого импульса,
полученный с помощью генератора сигналов, очень широкий.
Обратите внимание, что его
спектр не дискретный, а непрерывный. Другими словами энергия сигнала
распределена по всему частотному диапазону, а не сосредоточена на нескольких
отдельных частотах. Это характерно для недетерминированных сигналов, таких как
случайный шум, и переходные процессы. Заметьте, что, начиная с определенной
частоты, уровень равен нулю. Эта частота обратно пропорциональна длительности
импульса, поэтому, чем короче импульс, тем шире его частотный состав. Если бы в
природе существовал бесконечно короткий импульс (говоря математически,-
дельта-функция), то его спектр занимал бы весь частотный диапазон от 0 до + .
.
При исследовании непрерывного
спектра обычно невозможно сказать, принадлежит ли он случайному сигналу или
переходному. Это ограничение присуще частотному анализу Фурье, поэтому,
сталкиваясь с непрерывным спектром полезно изучить его временную реализацию.
Применительно к анализу вибрации машины, это позволяет отличить удары, имеющие
импульсные временные реализации, и случайный шум, вызванный, например,
кавитацией.
Единичный импульс, подобный
этому, редко встречается в роторных машинах, однако при ударном тесте этот тип
возбуждения используется специально для возбуждения машины. Хотя ее
вибрационный отклик не будет такой классически гладкой кривой, какая приведена
выше, но тем не менее он будет непрерывным в широком частотном диапазоне и
иметь пики на собственных частотах конструкции. Это означает, что удар является
очень хорошим типом возбуждения для выявления собственных частот, так как его
энергия распределена непрерывно в широком частотном диапазоне.
Если импульс, имеющий
приведенный выше спектр, повторяется с постоянной частотой, то результирующий
спектр, который показан, здесь, будет уже не непрерывным, а состоящим из
гармоник частоты повторения импульса, а его огибающая будет совпадать с формой
спектра единичного импульса.
Подобные сигналы производят
подшипники с дефектами (выбоины, царапины и т.п.) на одном из колец. Эти
импульсы могут быть очень узкими, причем они всегда вызывают появление большой
серии гармоник.
Модуляция
Модуляцией называют
нелинейное явление, при котором несколько сигналов взаимодействуют друг с
другом таким образом, что в результате получается сигнал с новыми частотами,
отсутствовавшими в исходных.
Модуляция - это бич
звукоинженеров, поскольку она вызывает модуляционное искажение, досаждающее
любителям музыки. Существует множество форм модуляции, включая частотную и
амплитудную модуляцию. Давайте рассмотрим по отдельности основные ее типы.
Показанная здесь частотная модуляция (frequency modulation - FM) есть
варьирование частоты одного сигнала под воздействием другого, имеющего обычно
более низкую частоту.
Модулируемая частота называется
несущей. На представленном спектре максимальная по амплитуде компонента и есть
несущая, а другие составляющие, которые похожи на гармоники, называют боковыми
полосами. Последние располагаются симметрично по обеим сторонам от несущей с
шагом, равным величине модулирующей частоты Частотная модуляция часто
встречается в спектрах вибрации машин, особенно в зубчатых передачах, где
частота зацепления зубьев модулируется оборотной частотой колеса. Она также
имеет место в некоторых акустических динамиках, хотя и на очень низком уровне.
Амплитудная модуляция
Частота временной реализации
амплитудно модулированного сигнала, кажется постоянной, а ее амплитуда
колеблется с постоянным периодом
Этот сигнал был получен
посредством быстрого варьирования усиления на выходе электронного генератора
сигналов в процессе записи. Периодическое изменение амплитуды сигнала с
определенным периодом называют амплитудной модуляцией. Спектр в этом случае
имеет максимальный пик на несущей частоте и по одной компоненте с каждой стороны.
Эти дополнительные компоненты суть боковые полосы. Обратите внимание, что в
отличие от частотной модуляции, приводящей к большому количеству боковых полос,
амплитудная модуляция сопровождается только двумя боковыми полосами, которые
располагаются относительно несущей симметрично на расстоянии, равном величине
модулирующей частоты (в нашем примере модулирующая частота - это частота, с
которой играли ручкой усиления при записи сигнала). В данном примере
модулирующая частота значительно ниже модулируемой, или несущей, однако на
практике они часто оказываются близкими друг к другу (например, на много
роторных машинах, имеющих близкие частоты вращения роторов). Кроме того, в
реальной жизни и модулирующий, и модулируемый сигналы имеют более сложную
форму, чем приведенные здесь синусоиды.
Связь между амплитудной
модуляцией и боковыми полосами можно наглядно представить в векторном виде.
Представим временной сигнал в виде вращающегося вектора, величина которого
равна амплитуде сигнала, а угол в полярных координатах - фазе. Векторное
представление синусоидального колебания - это просто вектор постоянной длины,
вращающийся вокруг своего начала со скоростью, равной частоте колебания. Каждый
цикл временной реализации соответствует одному обороту вектора, т.е. один цикл
- это 360 градусов.
Амплитудная модуляция
синусоидального колебания в векторном представлении выглядит как сумма трех
векторов: несущей модулируемого сигнала и двух боковых полос, Векторы боковых
полос вращаются один чуть быстрее, а другой чуть медленней несущего.
Добавление этих боковых полос
к несущей приводит к изменениям амплитуды суммы. При этом несущий вектор
кажется неподвижным, как если бы мы находились в системе координат, вращающейся
с несущей частотой. Заметим, что при вращении векторов боковых полос между ними
поддерживается постоянное фазовое соотношение, поэтому суммарный вектор
вращается с постоянной частотой (с частотой несущей).
Чтобы представить подобным
образом частотную модуляцию, достаточно ввести небольшое изменение фазовых
соотношений боковых векторов. Если боковой вектор меньшей частоты развернуть на
180 градусов, то возникнет частотная модуляция. При этом результирующий вектор
качается вперед и назад вокруг своего начала. Это означает возрастание и
убывание его частоты, то есть частотную модуляцию. Следует отметить также, что
результирующий вектор изменяется по амплитуде. То есть наряду с частотной
присутствует и амплитудная модуляция. Чтобы получить векторное представление
чистой частотной модуляции, необходимо ввести в рассмотрение множество боковых
векторов, имеющих точно определенные фазовые соотношения друг с другом. В
вибрации оборудования почти всегда присутствует как амплитудная, так и
частотная модуляция. В таких случаях, некоторые боковые полосы могут
складываться в противофазе, в результате чего верхние и нижние боковые полосы
будут иметь различные уровни, то есть не будут симметричны относительно
несущей.
Биения
Приведенная временная
реализация похожа на амплитудную модуляцию, однако, в действительности, это
лишь сумма двух синусоидальных сигналов с немного отличающимися частотами,
которая называется биение.
Из-за того, что эти сигналы
немного различаются по частоте, их разность фаз изменяется в пределах от нуля
до 360 градусов, а это означает, что их суммарная амплитуда будет то
усиливаться (сигналы в фазе), то ослабляться (сигналы в противофазе). В спектре
биения присутствуют компоненты с частотой и амплитудой каждого сигнала, и
полностью отсутствуют боковые полосы. В данном примере амплитуды двух исходных
сигналов различны, поэтому они не полностью взаимоуничтожаются в нулевой точке
между максимумами. Биение - это линейный процесс: оно не сопровождается
появлением новых частотных компонент.
Электродвигатели часто
генерируют вибрационные и акустические сигналы, напоминающие биения, в которых
частота лже-биения равна удвоенной частоте проскальзывания. В действительности,
это есть амплитудная модуляция вибрационного сигнала удвоенной частотой
проскальзыаания. Такое явление в электродвигателях иногда также называют
биением, вероятно, по той причине, что при нем механизм звучит как расстроенный
музыкальный инструмент, "бьет".
Этот пример биений аналогичен
предыдущему, однако уровни складывающихся сигналов равны, поэтому они полностью
взаимоуничтожаются в нулевых точках. Подобное полное взаимоуничтожение весьма
редко встречается в реальных вибрационных сигналах роторного оборудования.
Выше мы видели, что биения и
амплитудная модуляция имеют похожие временные реализации. Это действительно
так, но с небольшой поправкой - в случае биений имеет место сдвиг фазы в точке
полного взаимоуничтожений сигналов.
Логарифмическая частотная
шкала
До сих пор мы рассматривали
только один тип частотного анализа, в котором частотная шкала была линейной.
Такой подход применим в том случае, когда частотное разрешение постоянно во
всем частотном диапазоне, что характерно для так называемого узкополосного
анализа, или анализа в полосах частот с постоянной абсолютной шириной. Именно
такой анализ выполняют, например, БПФ-анализаторы.
Существуют ситуации, когда нужно
провести частотный анализ, но узкополосный подход не обеспечивает представление
данных в наиболее удобной форме. Например, когда изучается неблагоприятное
воздействие акустического шума на организм человека. Человеческий слух
реагирует не столько на сами частоты, сколько на их соотношения. Частота звука
определяется по высоте тона, воспринимаемого слушателем, причем изменение
частоты в два раза воспринимается как изменение тона на одну октаву, независимо
от того, каковы точные значения частот. Например, изменение частоты звука со
100 Гц до 200 Гц соответствует увеличению высоты на одну октаву, но и
увеличение с 1000 до 2000 Гц также есть сдвиг на одну октаву. Этот эффект
настолько точно воспроизводится в широком частотном диапазоне, что удобно
определить октаву, как полосу частот, у которой верхняя частота в два раза выше
нижней, хотя в обыденной жизни октава есть лишь субъективная мера изменения
звука.
Подводя итог, можно сказать,
что ухо воспринимает изменение частоты пропорционально ее логарифму, а не самой
частоте. Поэтому разумно выбирать для частотной оси акустических спектров
логарифмическую шкалу, что и делается почти повсеместно. Например, частотные
характеристики акустического оборудования всегда даются производителями в виде
графиков с логарифмической частотной осью. При осуществлении частотного анализа
звука также принято использовать логарифмический частотный масштаб.
Октавный и 1/3-октавный
анализ
Октава представляет собой
настолько важный частотный интервал для человеческого слуха, что анализ в так
называемых октавных полосах утвердился в качестве стандартного типа
акустических измерений. На рисунке показан типичный октавный спектр, в котором
используются значения центральных частот в соответствии с международными
стандартами ISO. Ширина каждой октавной полосы равна приблизительно 70% ее
центральной частоты. Иными словами, ширина анализируемых полос увеличивается
пропорционально их центральным частотам. По вертикальной оси октавного спектра
обычно откладывают уровень в дБ.
Можно возразить, что
частотное разрешение при октавном анализе слишком низкое для исследования
вибрации машин. Однако можно определить более узкие полосы с постоянной
относительной шириной. Наиболее общим примером этого является третьоктавный
спектр, где ширина полос составляет примерно 27% от центральных частот. Три
третьоктавные полосы укладываются в одну октаву, поэтому разрешение в таком
спектре в три раза лучше, чем при октавном анализе. При нормировании вибрации и
шума машин третьоктавные спектры часто применяются.
Важным преимуществом анализа
в полосах частот с постоянной относительной шириной является возможность
представления на едином графике очень широкого частотного диапазона с
достаточно узким разрешением на низких частотах. Конечно, при этом страдает
разрешение на высоких частотах, однако это не вызывает проблем в некоторых
приложениях, например, при отыскании неисправностей в машинах.
Для диагностики машин
узкополосные спектры (с постоянной абсолютной шириной полосы) очень полезны для
обнаружения высокочастотных гармоник и боковых полос, однако для обнаружения
многих простых неисправностей машин такое высокое разрешение часто не
требуется. Оказывается, что спектры виброскорости большинства машин спадают на
высоких частотах, и поэтому спектры с постоянной относительной шириной полосы
являются, обычно, более однородными в широком частотном диапазоне, Это
означает, что подобные спектры позволяют лучше использовать динамический
диапазон приборов. Третьоктавные спектры достаточно узки при низких частотах,
что позволяет выявить первые несколько гармоник оборотной частоты, и могут
эффективно использоваться для обнаружения неисправностей с помощью построения
трендов.
Следует, однако, признать,
что использование спектров с постоянной относительной шириной полосы в целях
вибродиагностики не очень широко принято в промышленности, за исключением, быть
может, нескольких достойных внимания примеров, таких как подводный флот.
Линейный и логарифмический
амплитудные масштабы
Может показаться, что лучше
всего исследовать спектры вибрации в линейном масштабе амплитуды, который дает
истинное представление измеренной амплитуды вибрации. При использовании
линейной амплитудной шкалы очень легко выявить и оценить наивысшую компоненту в
спектре, зато меньшие компоненты можно совершенно упустить или, в лучшем
случае, возникнут большие трудности при оценке их величины. Человеческий глаз
способен различить в спектре компоненты, которые приблизительно в 50 раз ниже
максимальной, но все, что меньше этого будет упущено.
Линейный масштаб может
применяться, если все существенные компоненты имеют примерно одинаковую высоту.
Однако в случае вибрации машин, зарождающиеся неисправности в таких деталях,
как, подшипники, порождают сигналы с очень малой амплитудой. Если мы хотим
надежно отследить развитие этих спектральных компонент, то лучше всего
откладывать на графике логарифм амплитуды, а не ее саму. При таком подходе мы
легко сможем изобразить на графике и визуально интерпретировать сигналы,
отличающиеся по амплитуде в 5000, т.е. иметь динамический диапазон по меньшей
мере в 100 раз больший, чем позволяет линейный масштаб.
Различные типы амплитудного
представления для одной и той же вибрационной характеристики (линейный и
логарифмический масштабы амплитуды) представлены на рисунке.
Обратите внимание, что на
линейном спектре линейная амплитудная шкала большие пики читаются очень хорошо,
но пики с низким уровнем трудно разглядеть. При анализе вибрации машин, однако,
часто интересуются именно малыми компонентами в спектре (например, при
диагностике подшипников качения). Не забывайте, что при мониторинге вибрации
нас интересуют рост уровней конкретных спектральных компонент, указывающий на
развитие зародившейся неисправности. В шариковом подшипнике двигателя может
развиваться небольшой дефект на одном из колец или на шарике, а уровень
вибрации на соответствующей частоте поначалу будет очень маленьким. Но это не
означает, что им можно пренебречь, ибо преимущество обслуживания по состоянию в
том и заключается, что оно позволяет обнаружить неисправность в начальной стадии
развития. Необходимо следить за уровнем этого небольшого дефекта, чтобы
предсказать, когда он превратится в существенную проблему, требующую
вмешательства.
Очевидно, что, если уровень
вибрационной компоненты, соответствующей какому-то дефекту, удваивается, то,
значит, с этим дефектом произошли большие изменения. Мощность и энергия
вибрационного сигнала пропорциональны квадрату амплитуды, поэтому ее удвоение
означает, что в четыре раза больше энергии диссипирует в вибрацию. Если мы
попытаемся отследить спектральный пик с амплитудой около 0.0086 мм/с, то нам
придется очень непросто, потому что он окажется слишком маленьким по сравнению
с гораздо более высокими компонентами.
На 2-м из приведенных
спектров представлена не сама амплитуда вибрации, а ее логарифм. Поскольку в
этом спектре используется логарифмическая амплитудная шкала, умножение сигнала
на любую константу означает простой сдвиг спектра вверх без изменения его формы
и соотношений между компонентами.
Как известно, логарифм
произведения равен сумме логарифмов множителей. Это означает, что если
изменение коэффициента усиления сигнала, не влияет на форму его спектра в
логарифмическом масштабе. Этот факт значительно упрощает визуальную
интерпретацию спектров, измеренных при различных коэффициентах усиления -
кривые просто смещаются на графике вверх или вниз, В случае использования
линейной шкалы форма спектра резко изменяется при изменении коэффициента
усиления прибора. Обратите внимание, что хотя по вертикальной оси на
приведенном графике используется логарифмическая шкала, единицы измерения
амплитуды остаются линейными (мм/с, дюймы/с), что соответствует увеличению
количества нулей после запятой.
И в данном случае мы получили
огромное преимущество для визуальной оценки спектра, так как вся совокупность
пиков и их соотношения теперь стала видимой. Другими словами, если мы будем
теперь сравнивать логарифмические спектры вибраций машины, у которой подшипники
испытывают износ, то мы увидим рост уровней только у подшипниковых тонов, тогда
как уровни других компонент будут оставаться неизменными. Форма спектра сразу
изменится, что можно будет обнаружить невооруженным глазом.
Это особый тип
логарифмической шкалы, который очень важен для вибрационного анализа.
Децибел
Удобной разновидностью
логарифмического представления является децибел, или дБ. По существу, он
представляет собой относительную единицу измерения, в которой используется
отношение амплитуды к некоторому опорному уровню. Децибел (дБ) определяется по
следующей формуле:
v= 20 lg (U/Uo), (5.9)
где Lv=
Уровень сигнала в дБ; U - уровень вибрации в обычных единицах ускорения,
скорости или смещения; Uo - опорный уровень, соответствующий 0 дБ.
Понятие децибела было впервые
введено в практику компанией Bell Telephone Labs еще в 20-е годы. Первоначально
оно применялось для измерений относительных потерь мощности и отношения
сигнал-шум в телефонных сетях. Вскоре децибел стал использоваться в качестве
меры уровня звукового давления. Будем обозначать уровень виброскорости в дБ как
VдБ (от слова Velocity скорость), и определим его следующим образом:
v= 20 lg (V/Vo), (5.10)
или
v= 20 lg {V/(5*10-8 м/с2)}.
(5.11)
Опорный уровень в 10-9
м/с2 достаточен для того, чтобы все измерения вибраций машины в
децибелах были бы положительными. Указанный стандартизованный опорный уровень
соответствует международной системе СИ, однако он не признается в качестве
стандарта в США и других странах. Например, в ВМС США и многих американских
отраслях промышленности в качестве опорного берется значение 10-8
м/с. Это приводит к тому, что американские показания для той же виброскорости
будут на 20 дБ ниже, чем в СИ. (В российском стандарте используется опорный
уровень виброскорости 510-8 м/с, поэтому российские показания Lv
еще на 14 дБ ниже американских).
Таким образом, децибел - это
логарифмическая относительная единица амплитуды колебаний, которая позволяет
легко проводить сравнительные измерения. Любое увеличение уровня на 6 дБ
соответствует удвоению амплитуды, независимо от исходного значения. Аналогично,
любое изменение уровня на 20 дБ означает рост амплитуды в десять раз. То есть
при постоянном соотношении амплитуд их уровни в децибелах будут различаться на
постоянное число, независимо от их абсолютных значений. Такое свойство очень
удобно при отслеживании развития вибрации (трендов): рост на 6 дБ всегда
указывает на удвоение ее величины.
В приведенной ниже таблице
показана взаимосвязь между изменениями уровня в дБ и соответствующими
отношениями амплитуд.
Мы настоятельно рекомендуем
использовать в качестве единиц измерения амплитуды вибрации именно децибелы,
так как в этом случае становится доступно гораздо больше информации по
сравнению с линейными единицами. Кроме того, логарифмическая шкала в дБ
значительно нагляднее, чем логарифмическая шкала с линейными единицами.
Таблица 5.1.
Взаимосвязь между изменениями
уровня и отношениями амплитуд
|
Изменение уровня в дБ
|
Соотношение амплитуд
|
Изменение уровня в дБ
|
Соотношение амплитуд
|
|
0
|
1
|
30
|
31
|
|
3
|
1,4
|
36
|
60
|
|
6
|
2
|
40
|
100
|
|
10
|
3,1
|
50
|
310
|
|
12
|
4
|
60
|
1000
|
|
18
|
8
|
70
|
3100
|
|
20
|
10
|
80
|
10,000
|
|
24
|
16
|
100
|
100,000
|
Преобразование единиц измерений
Виброускорение и вибросмещение могут также выражаться в децибелах. Чтобы
различать между ними, будем обозначать децибелы ускорения - АдБ (от
Acceleration - ускорение), децибелы скорости - VдБ (от Velocity
-скорость), а децибелы смещения - DдБ (от Displacement - смещение).
Шкала АдБ является одной из наиболее употребительных; в качестве
опорного уровня ускорения обычно используют значение 1 мкg (в России стандартный
опорный уровень виброускорения - 1мкм/с2, то есть почти в 10 раз
ниже; это означает, что значение La в АдБ, взятое в
соответствии с российским стандартом, будет на 20 дБ выше американского).
Оказывается, что при 3,16 Гц уровни виброскорости в VдБ и виброускорения
в АдБ совпадают (в американской системе это имеет место на частоте
159,2 Гц). Приведенные ниже формулы определяют взаимосвязи между уровнями
виброускорения, скорости и смещения в АдБ, VдБ и DдБ
соответственно:
LV = LA - 20 lg(f) + 10,V =
LD + 20 lg(f) - 60, (5.12)
LD = LA - 20 lg(f2) + 70,
Примечание
Ускорение и Скорость в линейных единицах могут быть получены из
соответствующих уровней по формулам:
 , (5.13)
, (5.13)
 . (5.14)
. (5.14)
Примечание
Заметим, что для временных реализации во временной области всегда
используются линейные единицы измерения амплитуды: мгновенное значение сигнала
может быть и отрицательным, и поэтому его невозможно логарифмировать.
5.2 Средства измерения
вибрации
Для измерения вибрации и дополнительной оценки уровня шума применяются
специализированные виброметры, виброскопы и универсальные шумовиброметры.
При измерении вибраций всегда участвуют три элемента: вибрирующее звено,
исходное звено и устройство для измерения движения вибрирующего звена
относительно невибрирующего. Средство измерения параметров вибраций носит
название виброметр (рис. 5.37, а).
Обычно исходное (невибрирующее) звено создаётся с помощью массы, которая
может перемещаться вдоль (или вокруг) оси вибраций.
Масса 1 связывается с основанием прибора 4 с помощью пружины 2 и демпфера
3. Преобразователь 5 выдаёт сигнал смещения корпуса относительно массы 1, в
зависимости от параметров массы 1, пружины 2 и демпфера 3. Сигнал может быть
пропорциональным относительному перемещению массы 1 и основания прибора 4,
относительной скорости или ускорению. Масса 1 виброметра носит название
сейсмического элемента, а система, образующаяся из массы 1, пружины 2 и демпфера
3 - сейсмической системы.
Рассмотрим конструктивные схемы некоторых типов виброметров.
Применяемые в настоящее время виброметры имеют электрический выход. В
качестве преобразователей перемещения в электрический сигнал используют
резисторные, индуктивные, ёмкостные, электромагнитные и др.
На рисунке 5.37, б представлена конструкция электромагнитного линейного
виброметра с направляющей опорой для сейсмического элемента. Сейсмический
элемент 8 установлен на опорном стержне 4 в вязкой жидкости 3. Направляющий
диск 1 втулки 5 с малым трением позволяют перемещаться сейсмическому элементу
вдоль оси чувствительности 2. Величина перемещения (вибрации) определяется
наведением токов в обмотке 7, постоянным магнитом 6, закреплённым в
сейсмическом элементе 8.
Виброметр этого типа при объёме 90 см3 и весе 450 г обладает
собственной частотой 10 Гц, чувствительностью 0,03 В/(см×с-2) и диапазоном входных
смещений ±0,5 см.
Виброметр с индуктивным мостом (см. рис. 5.37, в). Сейсмический элемент
7, представляющий собой цилиндр из магнитного материала с малым гистерезисом,
выполняет функции якоря 12 и перемещается между двумя катушками 5 в свободном
пространстве, заполненном вязкой жидкостью 11. Сейсмический элемент 7
установлен на опорном стержне 1 с немагнитными втулками 3 и 9 и связан с
корпусом прибора 13 пружинами 4 и 8. Регистрация сигнала виброметра
производится на осциллографе. Виброметр при объёме 45 см3 весит 200
г.
При питании напряжением 10 В, 400 Гц он обладает чувствительностью 0,01
В/(см×с2). Прибор работает в диапазоне
измерения ускорений до 10 g.

Рис. 5.37. Средства измерения вибраций:
а - конструкция виброметра (1 -масса; 2 -пружина; 3 - демпфер;
- основание прибора; 5 - преобразователь); б - конструкция
электромагнитного линейного виброметра (1 - направляющий диск; 2 - ось
чувствительности; 3 - жидкость; 4 - опорный стержень; 5 - втулка; - постоянный
магнит; 7 - обмотка; 8 - сейсмический элемент; 9 - каркас катушки; 10 - паз; 11
- воздушный зазор; 12 - пружинный мост; 13 - корпус прибора); в - конструкция
виброметра с индуктивным мостом (1 - опорный стержень; 2 - входная ось; 3 и 9 -
немагнитная втулка; 4 - пружина; 5 - катушки; 6 - лента; 7 - сейсмический
элемент; 8 - пластинчатая пружина; 10 - паз; 11 - жидкость; 12 - якорь; 13 -
корпус; 14 - шток).
Для измерения шума используются специальные приборы - шумомеры. Шумомер
состоит, как правило, из датчика (микрофона), усилителя, частотных фильтров
(анализатора частоты), регистрирующего прибора и индикатора, показывающего
уровень измеряемой величины в дБ.
По точности шумомеры делятся на четыре класса 0, 1, 2 и 3. Шумомеры
класса 0 используются как образцовые средства измерения; приборы класса 1 - для
лабораторных и натурных измерений; 2 - для технических измерений; 3 - для
ориентировочных измерений шума. Каждому классу приборов соответствует диапазон
измерений по частотам: шумомеры классов 0 и 1 рассчитаны на диапазон частот от
20 Гц до 18 кГц, класса 2 - от 20 Гц до 8 кГц, класса 3 - от 31,5 Гц до 8 кГц.
Для измерения эквивалентного уровня шума при усреднении за длительный период
времени применяются интегрирующие шумомеры [35, 37-44].
Глава 6. ИЗМЕРЕНИЕ ФИЗИКО-ХИМИЧЕСКИХ СВОЙСТВ ЖИДКОСТЕЙ
И ГАЗОВ
Исследование вопросов измерения физико-химических свойств таких
жидкостей, как нефть и пластовая вода, а затем и газов, рассматривается в
разделе по следующей схеме: краткое изучение предмета измерения - выявление его
физико-химических свойств - рассмотрение методик измерения - изучение систем и
средств измерения и контроля в соответствии с рассмотренными методиками.
6.1 Измерение физико-химических свойств нефти и
пластовых вод
.1.1 Измерение физико-химических свойств нефти
Известно, что нефть - горючая маслянистая жидкость, преимущественно
темного цвета, представляет собой смесь различных углеводородов. Цвет нефти
варьируется от светло-коричневого до темно-бурого и черного и зависит от
растворенных в ней смол. Нефть представляет собой смесь жидких углеводородов
(парафиновых, нафтеновых и ароматических), в которой растворены газообразные и
твердые углеводороды. В незначительных количествах она содержит серные и
азотные соединения, органические кислоты и некоторые другие химические
соединения. В нефти встречаются следующие группы углеводородов:
· метановые (парафиновые) с общей формулой СnН2n+2;
· нафтеновые - СnН2ni;
· ароматические - СnH2n-6.
Преобладают углеводороды метанового ряда (табл.6.1).
Анализ нефтей с выделением индивидуальных соединений требует много
времени. В технологических расчетах при определении качества сырья, продуктов
нефтепереработки и нефтехимии часто пользуются данными технического анализа,
который состоит в определении некоторых физических, химических и
эксплуатационных свойств нефтепродуктов.
Таблица 6.1.
Углеводороды метанового ряда
|
Наименование
|
Формула
|
Примечание
|
|
Метан
|
СН4
|
При атмосферном давлении и нормальной температуре в
газообразном состоянии
|
|
Этан
|
С2Н6
|
|
|
Пропан
|
С3Н8
|
|
|
Бутан
|
С4Н10
|
|
|
Пентан
|
С5Н12
|
Неустойчивы, легко переходят из газообразного состояния в
жидкое и обратно
|
|
Гексан
|
С6Н14
|
|
|
Гептан
|
С7Н16
|
|
|
Октан
|
С8Н18 C17H36
|
Жидкие вещества
|
|
С18Н38 и т.д.
|
Твердые вещества (парафины)
|
Вообще, с этой целью используют методы, в комплексе дающие возможность
охарактеризовать товарные свойства нефтепродуктов в различных условиях эксплуатации,
связать их с составом анализируемых продуктов, дать рекомендации для наиболее
рационального их применения:
· физические - определение плотности, вязкости, температуры плавления,
замерзания и кипения, теплоты сгорания, молекулярной массы, а также некоторых
условных показателей (пенетрация, дуктильность);
· химические, использующие классические приемы аналитической
химии;
· физико-химические - колориметрия, потенциометрическое
титрование, нефелометрия, рефрактометрия, спектроскопия, хроматография;
· специальные - определение октанового и цетанового чисел
моторных топлив, химической стабильности топлив и масел, коррозионной
активности, температуры вспышки и воспламенения и др. [45].
Однако, в рамках изучаемых в разделе вопросов, касающихся основных физических
свойств нефти, выделим только принципы и средства измерения таких свойств, как:
1. Плотность;
2. Вязкость;
. Испаряемость;
. Сжимаемость;
. Газосодержание;
. Газовый фактор.
Измерение плотности.
Плотность - отношение массы к объему. Единица измерения плотности в
системе СИ выражается в кг/м3.
Нефти различаются по плотности, т.е. по массе, содержащейся в единице их
объема. Если в сосуд с нефтью налить воду, то, за исключением редких случаев,
нефть всплывает. Обычно она легче воды. Плотность нефти, измеренная при 20°С,
отнесенная к плотности воды, измеренной при 4°С, называется относительной
плотностью нефти.
Определение плотности можно проводить при любой температуре, а затем
вычислить значение относительной плотности, используя коэффициент объемного
расширения, значения которого приводятся в справочной литературе. Относительная
плотность нефтей колеблется в пределах 0,5-1,05 кг/дм3 (обычно
0,82-0,95). Нефти с относительной плотностью до 0,85 называются легкими. Своей
легкостью они обязаны преобладанию в их составе метановых углеводородов.
Относительную плотность от 0,85 до 0,90 имеют средние нефти, а свыше 0,90 -
тяжелые. В тяжелых нефтях содержатся преимущественно циклические углеводороды.
Плотность нефти зависит от многих факторов: химической природы входящих в
нее веществ, фракционного состава, количества смолистых веществ, количества
растворенных газов и других. Плотность нефти зависит и от глубины залегания,
как правило, уменьшаясь с ее увеличением. Исключения из этого правила объясняют
вторичными явлениями, например, миграцией легких нефтей в более высокие
горизонты залегания.
При определении плотности нефтей и нефтепродуктов обычно пользуются
несколькими методами:
· с помощью ареометров (нефтеденсиметров),
· методом взвешенной капли,
· с помощью гидростатических весов,
· пикнометрическим методом (наиболее точный).
Ареометр (нефтеденсиметр) - прибор для определения плотности жидкости по
глубине погружения поплавка, который представляет собой стеклянную полую
трубку, зауженную в верхней части и герметично запаянную с обоих концов. В
нижней части ареометра находится груз (как правило, металлическая дробь),
вверху - шкала плотности. Масса ареометра заранее известна и точно
отрегулирована. На шкале ареометра нанесены деления, показывающие плотность исследуемой
нефти (рис. 6.2). Идея измерения плотности ареометром заключается в том, чтобы
зафиксировать уровень нефтепродукта на шкале ареометра при различной глубине
погружения ареометра в жидкость. Величина погружаемости ареометра обратно
пропорциональна плотности измеряемой жидкости, т.е. чем ниже плотность
жидкости, тем больше погрузится в нее ареометр.
Ареометры нефтепродуктов или нефтеденсиметры производят трех исполнений.
У ареометров первого исполнения (АНТ-1) цена деления шкалы равна 0,5 кг/м3,
у ареометров второго и третьего исполнения (АНТ-2 и АН) - 1 кг/м3. У
ареометров первого и второго исполнения есть встроенный термометр с диапазонами
измерения температуры от -20 до +40 0С. Ареометр АН термометра не
имеет.
Для испытуемого нефтепродукта используют ареометр с соответствующим
диапазоном шкалы, например: для бензинов - 640-780, для керосинов - 765-855,
для дизельных топлив - 770-870. Затем подбирают цилиндр, чтобы его высота
обеспечивала погружение ареометра, но при этом ареометр не касался дна цилиндра.
Обычно для АНТ-1 используют цилиндры высотой 50 см, для АНТ-2 - 35 см.
Для малых количеств жидких нефтепродуктов или твердых нефтепродуктов
используют метод выравнивания плотностей или метод взвешенной капли. При этом
каплю или кусочек нефтепродукта вводят в спирто-водный или слабый водно-солевой
раствор и добавляют в раствор воду или концентрированный раствор соли, пока
испытуемый объект не будет взвешен в растворе. Затем ареометром определяют
плотность раствора, она будет равна плотности испытуемого нефтепродукта.
С точностью до 0.0005 плотность определяют с помощью метода
гидростатических весов, которые градуируются по плотности воды при 20оС
и дают показания.
Пикнометрический метод позволяет определить плотность с точностью до
0.00005. Применяют пикнометры различной формы и емкости - в зависимости от
агрегатного состояния и плотности исследуемого вещества. Высокую популярность
при измерении плотности жидкостей получили плотномеры. Плотномер является
электронным устройством, действующим по определенному принципу измерения.
Плотномер заменяет традиционные средства измерения плотности жидкости -
ареометры и пикнометры (рис. 6.4).
декабря 2010 года был принят и с 1 июля 2011 года введен в действие
документ Р 50.2.075 «Нефть и нефтепродукты [46].
Лабораторные методы измерения плотности, относительной плотности и
плотности в градусах API», в котором, кроме требований к ареометрическому и
пикнометрическому методам, также сформулированы и требования к вибрационному
методу измерения и установлена величина методической погрешности при измерении
плотности нефти и нефтепродуктов.
Метрологические требования этого документа для разных методов измерения
плотности сведены в табл. 6.2:
Таблица 6.2.
Метрологические требования для разных методов измерения плотности
|
Средство измерения
|
Диапазон, кг/м3
|
Погрешность СИ, кг/м3
|
Сходимость метода, кг/м3
|
Воспроизводимость метода, кг/м3
|
|
Ареометр
|
600…1100
|
±0.3, ±0.6
|
0.51) , 0.62)
|
1.21) , 1.52)
|
|
Пикнометр
|
777…892
|
-
|
0.7
|
1.0
|
|
Вибрационный плотномер
|
680…9701) 750…9502)
|
±0.1
|
0.11) 0.8…1.02)
|
0.51) 2.9…3.82)
|
1) Для светлых нефтепродуктов.
) Для темных нефтепродуктов и сырой нефти.
Из приведенных данных следует, что использование вибрационного метода
измерения для светлых нефтепродуктов дает более точные результаты в сравнении с
другими методами измерения плотности. Для темных нефтепродуктов и сырой нефти
сходимость и воспроизводимость результатов при вибрационном методе измерения
хуже, чем при использовании ареометра или пикнометра.
В любом случае, использование плотномеров с пределом допустимой
абсолютной погрешности измерения плотности лучше, чем 0.1 кг/м3 не
представляется целесообразным потому, что определяющим фактором при
формировании общей погрешности измерения плотности нефти или нефтепродуктов
будет погрешность метода. Соответственно, вложение дополнительных средств в
приобретение более точного плотномера не приведет к желаемому увеличению общей
точности измерения.
Дополнительным аргументом в пользу отказа от применения более точных
приборов для измерений плотности нефти и нефтепродуктов является сложность
проведения их периодической поверки, поскольку доступные ГСО плотности имеют
абсолютную погрешность не менее 0.05 кг/м3 .
Лабораторные приборы, обеспечивающие измерение плотности с пределом
допустимой абсолютной погрешности в 0.1 кг/м3 , имеются в
производственных линейках всех ведущих производителей вибрационных плотномеров.
Обращает на себя внимание то, что все эти приборы имеют схожую компоновку с
характерным расположением датчика и, соответственно, боковым вводом пробы,
остающуюся неизменной на протяжении нескольких поколений этих приборов. Видимо,
это объясняется схожей конструкцией датчиков, унаследованной от бесспорного
«законодателя мод» в области вибрационной плотнометрии - австрийской компании
Anton Paar. Также все приборы имеют встроенные термостаты с принудительной
вентиляцией и, соответственно, близкие технические характеристики: диапазоны
температур и диапазоны измерения, минимальный объем пробы и прочее, вплоть до
набора внешних интерфейсов. Имеющиеся отличия, в основном, касаются ряда
вспомогательных функций, обеспечивающих некоторые конкурентные преимущества
производителям.
Схожесть конструкций плотномеров от разных производителей определяет
схожие массогабаритные характеристики, близкую потребляемую мощность и примерно
одинаковый уровень цен
Плотномер отечественной компании «ТЕРМЭКС», благодаря собственной
конструкции датчика и термостата, имеет другую компоновку, что позволило
создать легкий, компактный и недорогой прибор с низким энергопотреблением,
обладающий при этом сходными метрологическими характеристиками,
соответствующими требованиям к рутинным измерениям плотности нефти и
нефтепродуктов.
Технические характеристики плотномеров «ВИП-2М», «ВИП-2МР»
Диапазон показаний плотномеров, г/см3
..................................от 0 до 3,0
Диапазон измерений плотномеров, г/см3...................................от
0 до 2,0
Предел допустимой абсолютной погрешности измерений плотности, г/см3:
· для модификации
ВИП-2М................................................... ±0,0003
· для модификации
ВИП-2МР................................................. ±0,0001
Вязкость контролируемой среды, мПа·с, не
более............................... 300
Индикация измеряемой плотности.....................................
цифровая
Цена единицы младшего разряда, г/см3:
· для модификации
ВИП-2М..................................................... 0,0001
· для модификации ВИП-2МР
.................................................0,00001
Номинальный объём измерительной ячейки, мл..................................1,5
Время прогрева плотномера, ч, не более
..............................................0,5
Время одного измерения при установившейся температуре в измерительной
ячейке, с, не более .................................................................20
Диапазон температуры термостата датчика, °С ...от плюс 15 до плюс 60
Цена единицы младшего разряда показаний температуры,
°С......................... 0,01
Материалы, контактирующие с анализируемыми жидкостями - боросиликатное
стекло, тефлон.
Интерфейс связи
..............................................................................
RS232
Геометрические размеры, мм, не более ..................................
205×200×80
Масса, кг, не
более...................................................................................3,0
Требование к электропитанию:
· напряжение питающей сети, В
............................................ 220±22
· частота тока питающей сети, Гц
...............................................50±1
Потребляемая мощность, B·А, не более..................................................12
Время непрерывной работы плотномера должно быть, ч, не менее.......8
Средний срок службы, лет, не менее
........................................................7
Наработка на отказ, ч, не менее ..........................................................
5000
Гарантийный срок службы, мес, не
менее................................................24
Измерение вязкости.
Вязкость - свойство жидкости или газа оказывать сопротивление перемещению
одних ее частиц относительно других. Она зависит от силы взаимодействия между
молекулами жидкости. Для характеристики этих сил используется коэффициент
динамической вязкости  . За единицу динамической вязкости принят паскаль-секунда (Пас),
т. е. вязкость такой жидкости, в которой на 1 м2 поверхности слоя
действует сила, равная одному ньютону, если скорость между слоями на расстоянии
1 см изменяется на 1 см/с. Жидкость с вязкостью 1 Пас относится к числу
высоковязких.
. За единицу динамической вязкости принят паскаль-секунда (Пас),
т. е. вязкость такой жидкости, в которой на 1 м2 поверхности слоя
действует сила, равная одному ньютону, если скорость между слоями на расстоянии
1 см изменяется на 1 см/с. Жидкость с вязкостью 1 Пас относится к числу
высоковязких.
В нефтяном деле, так же как и в гидрогеологии и ряде других областей
науки и техники, для удобства принято пользоваться единицей вязкости в 1000 раз
меньшей - мПас. Так, пресная вода при температуре 20  имеет вязкость 1 мПас, а большинство
нефтей, добываемых в России, - от 1 до 10 мПас, но встречаются нефти с
вязкостью менее 1 мПас и несколько тысяч мПас. С увеличением содержания в нефти
растворенного газа, ее вязкость заметно уменьшается. Для большинства нефтей,
добываемых в России, вязкость при полном выделении из них газа (при постоянной
температуре) увеличивается в 24 раза, а с повышением температуры резко
уменьшается.
имеет вязкость 1 мПас, а большинство
нефтей, добываемых в России, - от 1 до 10 мПас, но встречаются нефти с
вязкостью менее 1 мПас и несколько тысяч мПас. С увеличением содержания в нефти
растворенного газа, ее вязкость заметно уменьшается. Для большинства нефтей,
добываемых в России, вязкость при полном выделении из них газа (при постоянной
температуре) увеличивается в 24 раза, а с повышением температуры резко
уменьшается.
Вязкость жидкости характеризуется также коэффициентом кинематической
вязкости, т. е. отношением динамической вязкости к плотности жидкости. За
единицу в этом случае принят м2/с.
На практике иногда пользуются понятием условной вязкости, представляющей
собой отношение времени истечения из вискозиметра определенного объема жидкости
ко времени истечения такого же объема дистиллированной воды при температуре 20 .
Вязкость изменяется в широких пределах (при 50 1,2 ÷ 55·10-6 м2/с)
и зависит от химического и фракционного состава нефти и смолистости (содержания
в ней асфальтеново-смолистых веществ).
Приборы, предназначенные для измерения вязкости называются
вискозиметрами. Раздел науки, изучающий измерения с помощью вискозиметров,
получил название вискозиметрии.
К основным методам вискозиметрии относятся:
· капиллярный;
· вибрационный;
· падающего шарика (метод Стокса)
· ротационный;
· ультразвуковой.
Капиллярный метод вискозиметрии
Метод капиллярной вискозиметрии опирается на закон Пуазейля о вязкой
жидкости, описывающий закономерности движения жидкости в капилляре.
Приведем уравнение гидродинамики для стационарного течения жидкости, с
вязкостью η через капилляр вискозиметра:
 , (6.1)
, (6.1)
где Q - количество жидкости, протекающей через капилляр капиллярного
вискозиметра в единицу времени, м3/с,- радиус капилляра
вискозиметра, м- длина капилляра капиллярного вискозиметра, м
η - вязкость жидкости, Па·с,
р - разность давлений на концах капилляра вискозиметра, Па.
Отметим, что формула Пуазейля справедлива только для ламинарного потока
жидкости, то есть при отсутствии скольжения на границе жидкость - стенка
капилляра вискозиметра. Приведенное уравнение используют для определения
динамической вязкости. Ниже размещено схематическое изображение капиллярного
вискозиметра.

Рис.6.7. Принцип работы капиллярных вискозиметров.
В капиллярном вискозиметре жидкость из одного сосуда под влиянием
разности давлений р истекает через капилляр сечения 2R и длины L в другой
сосуд. Из рисунка видно, что сосуды имеют во много раз большее поперечное
сечение, чем капилляр вискозиметра, и соответственно этому скорость движения
жидкости в обоих сосудах в N раз меньше, чем в капилляре вискозиметра. Таким
образом, не все давление пойдет на преодоление вязкого сопротивления жидкости, очевидно,
что часть его будет расходоваться на сообщение жидкости нопределённой
кинетической энергии. Следовательно, в уравнение Пуазейля необходимо ввести
некоторую поправку на кинетическую энергию, называемую поправкой Хагенбаха:
 , (6.2)
, (6.2)
где h - коэффициент, стремящийся к единице, d -плотность исследуемой
жидкости.
Вторую поправку условно назовём поправкой влияния начального участка
капилляра вискозиметра на характер движения исследуемой жидкости. Она будет
характеризовать возможное возникновение винтового движения и завихрения в месте
сопряжения капилляра с резервуаром капиллярного вискозиметра (откуда вытекает
жидкость). Суть поправки состоит в том, что вместо истинной длины капилляра
вискозиметра L мы вводим кажущуюся длину L' (длину капилляра вискозиметра):
 , (6.3)
, (6.3)
где n - определяется экспериментально на основе изменений при разных
значениях L и примерно равен единице.
Следует учитывать, что при измерении вязкости органических жидкостей с
большой кинематической вязкостью поправка Хагенбаха незначительна и составляет
доли процента. Если же говорить о высокотемпературных вискозиметрах, то
вследствие малой кинематической вязкости жидких металлов поправка может
достигать 15%.
Метод капиллярной вискозиметрии вполне можно отнести к высокоточному
методу вискозиметрии в силу того, что относительная погрешность измерений
составляет доли процента, в зависимости от подбора материалов вискозиметра и
точности отсчёта времени, а также иных параметров, участвующих в методе
капиллярного истечения.
Вибрационный метод вискозиметрии
Вибрационный метод вискозиметрии базируется на определении изменений
параметров вынужденных колебаний тела правильной геометрической формы,
называемого зондом вибрационного вискозиметра, при погружении его в исследуемую
среду. Вязкость исследуемой среды определяется по значениям этих параметров,
при этом обычно используется градуировочная кривая вискозиметра (для случая
примитивного вибрационного вискозиметра; в целом, не теряя общности, этот
принцип переносится и на более сложные приборы).
Введём несколько обозначений:
ω - частота колебаний, τ
- время колебания
тонкого упруго закрепленного зонда вибрационного вискозиметра, S - площадь
пластины зонда вискозиметра; колебания происходят под действием гармонической
силы  . Вязкость и плотность исследуемой
среды соответственно обозначим η и d.
. Вязкость и плотность исследуемой
среды соответственно обозначим η и d.
Частотно-фазовый вариант вибрационного метода вискозиметрии используется
для сильно-вязких жидкостей. В этом случае измеряется частота колебаний зонда
вискозиметра, сначала не погруженного (ω0) и затем погруженного (ω) в жидкость при сдвиге фаз (фи)  .
.
Для измерения вязкости менее вязких сред, например, металлических
расплавов наиболее подходящим является амплитудно-резонансный вариант
вибрационного метода вискозиметрии. В этом случае добиваются того, чтобы
амплитуда А колебаний была максимальной (путём подбора частот колебаний).
Поэтому измеряемым параметром, по которому определяется вязкость становится
амплитуда колебаний зонда вискозиметра. В общем случае для малых значений
вязкости имеем:
 . (6.4)
. (6.4)
Учтем поправки С2 (сторонние силы: трения, поверхностного
натяжения, лобового сопротивления и т.п.). Имеем конечную формулу метода вибрационной
вискозиметрии:
 . (6.5)
. (6.5)
Это основная формула вибрационного метода вискозиметрии.
Градуировка вискозиметра производится по известным жидкостям (именно
определяются постоянные С1,С2).
Метод падающего шарика вискозиметрии (метод Стокса)
Метод падающего шарика вискозиметрии основан на законе Стокса, согласно
которому скорость свободного падения твердого шарика в вязкой неограниченной
среде можно описать следующим уравнением:
 , (6.6)
, (6.6)
где V - скорость поступательного равномерного движения шарика
вискозиметра; r - радиус шарика; g -
ускорение свободного падения; d - плотность материала шарика; - плотность жидкости.
Необходимо отметить, что уравнение справедливо только в том случае, если
скорость падения шарика вискозиметра довольно мала и при этом соблюдается некое
эмпирическое соотношение:  (соотношение вискозиметра Гепплера).
(соотношение вискозиметра Гепплера).
Как и в капиллярном методе вискозиметрии, необходимо учитывать
возникающие поправки на конечные размеры цилиндрического сосуда вискозиметра с
падающим шариком (высотой L и радиусом R, при условии, если выполняется
вискозиметр с падающим шариком). Такие действия приводят к уравнению для определения
динамической вязкости жидкости методом падающего шарика вискозиметрии:
 . (6.7)
. (6.7)
На основе метода создано множество моделей высокотемпературных
вискозиметров, в которых измеряется вязкость расплавленных стекол и солей.
Ротационный метод вискозиметрии
Ротационный метод вискозиметрии заключается в том, что исследуемая
жидкость помещается в малый зазор между двумя телами, необходимый для сдвига
исследуемой среды. Одно из тел на протяжении всего опыта остаётся неподвижным,
другое, называемое ротором ротационного вискозиметра, совершает вращение с
постоянной скоростью. Очевидно, что вращательное движение ротора вискозиметра
передается к другой поверхности (посредством движения вязкой среды; отсутствие
проскальзывания среды у поверхностей тела предполагается, таким образом
рассматриваются).
Отсюда следует тезис: момент вращения ротора ротационного вискозиметра
является мерой вязкости.
Для простоты мы рассмотрим инверсную модель ротационного вискозиметра:
вращаться будет внешнее тело, внутренее тело останется неподвижным, ему и будет
сообщаться момент вращения. Однако для краткости изложения будем называть
внутреннее тело ротором ротационного вискозиметра.
Где:1,L - радиус и длина ротора ротационного вискозиметра;
ω - постоянная угловая скорость вращения
внешнего тела;2 - радиус вращающегося резервуара ротационного
вискозиметра;
η - вязкость исследуемой cреды;1
- момент вращения, передаваемый через вязкую жидкость, равный
 . (6.8)
. (6.8)
,l - диаметр и длина упругой
нити,
φ
- угол, на который закручивается
неподвижно закреплённая нить,- момент упругости материала нити.
При этом крутящий момент M1
ротора ротационного вискозиметра уравновешивается моментом сил упругости нити М2:
 . (6.9)
. (6.9)
Заметим вновь, что М1
= М2, откуда после нескольких преобразований относительно η имеем:
 (6.10)
(6.10)
где k - постоянная
ротационного вискозиметра.
Эта формула называется
формулой вязкости ротационного метода вискозиметрии.
Если рассматривать ту же
задачу для ротационного вискозиметра с вращающимся внутренним (ротором
висозиметра) и неподвижным внешним телами, имеем:
 (6.11)
(6.11)
или формула вязкости
ротационного вискозиметра.
В этом случае G - момент,
необходимый для поддержания постоянной частоты вращения, (один оборот ротора
вискозиметра за τ
с).
Заметим, что полученные
отношения справедливы для цилиндра бесконечной длины, в реальных условиях
учитывается поправка на размеры тел ротационного вискозиметра. Для этого
производится вычисление так называемой эффективной высоты H ротационного
вискозиметра:
. проводится измерение
момента для жидкостей с различным значением вязкости (η1 и η2) при
двух различных высотах внутреннего цилиндра (L1 и L2);
. экстраполяцией прямых М1
= f(L) и М2 = f(L) к нулевому значению М1 и М2
получают величину ∆L;
. H=L+∆L.
Эффективную высоту
ротационного вискозиметра H подставляют в уравнения.
Ультразвуковой метод
вискозиметрии
Сущность метода
ультразвуковой вискозиметрии заключается в том, что в исследуемую среду
погружают пластинку из магнито-стрикционного материала, называемую зондом
вискозиметра на которую намотана катушка, в которой возникают короткие импульсы
тока длительностью порядка 20±10 мксек, приводящие к возникновению колебаний. В
соответствии с законом сохранения, при колебаниях пластинки в катушке наводится
ЭДС, которая убывает со скоростью, зависящей от вязкости среды. Затем, при
падении ЭДС до определённого порогового значения, в катушку поступает новый
импульс. Вискозиметр определяет вязкость среды по частоте следования импульсов.
Вискозиметры, действие
которых основано на ультразвуковом методе вискозиметрии, нельзя отнести к
классу вискозиметров с широким диапазоном измерений. К классу
высокотемпературных вискозиметров их также нельзя отнести в силу величины
относительной погрешности, возникающей при высокотемпературной вискозиметрии и
свойств материалов прибора.
Средства измерения вязкости
(вискозиметры)
Классификация вискозиметров
· по температуре исследуемой среды различают
высокотемпературные вискозиметры и вискозиметры, изготовленные из
нетермостойких материалов;
· по свойствам исследуемой вязкой среды различают универсальные
вискозиметры и специальные (т.е. предназначенные для измерения вязкости сред с
определёнными заранее известными свойствами, например ньютоновских жидкостей);
· по методу вискозиметрии различают капиллярные, вибрационные,
ультразвуковые, ротационные, пузырьковые, вискозиметры с падающим шариком;
· по точности измерений различают высокоточные вискозиметры и
даже т.н. образцовые вискозиметры;
· по области применения различают промышленные, лабораторные,
медицинские и полевые вискозиметры.
Вискозиметр вибрационный
Вибрационный вискозиметр в самом простом случае представляет из себя
резервуар с вязкой жидкостью и некоторое тело (пластина, шар, цилиндр),
называемое зондом вискозиметра, которое производит вынужденные колебания в вязкой
среде.
Сущность эксперимента заключается в определении изменений параметров
вынужденных колебаний зонда вискозиметра при погружении его в вязкую среду.
Руководствуясь теорией метода вибрационной вискозиметрии, по значением этих
параметров определяют вязкость среды.
Вибрационый вискозиметр имеет значительно большую по сравнению с
ротационными вискозиметрами чувствительность и также может быть применён для
сред температурой до 2000 °C в инертной атмосфере или вакууме при наличии как
больших, так и сравнительно малых масс расплавов.
В настоящее время для измерения динамической вязкости широко применяют
электронные вибрационные вискозиметры, в которых зонд совершает вынужденные
колебания под воздействием импульсов электромагнитного вибратора со встроенным
датчиком амплитуды.
Вибрационные высокотемпературные вискозиметры с электронным дистанционным
управлением могут использоваться в условиях агрессивных средств.
Относительная погрешность измерений при использовании вибрационного
вискозиметра составляет ±0,5-1%. При работе расплавами в интервале 700-1900 °C
общая погрешность вискозиметра увеличивается и может составить ±3-5% [48].
Вискозиметр Гепплера
Вискозиметр Гепплера относится к вискозиметрам с движущимся в исследуемой
среде шариком. Действие вискозиметра Гепплера основано на законе Стокса о
шарике, падающем в неограниченной вязкой среде.
Вискозиметр представляет собою трубку, выполненную из прозрачного (или
непрозрачного) материала, в которую помещается вязкая среда. Вязкость
определяется по скорости прохождения падающим шариком промежутков между метками
на трубке вискозиметра, исходя из формул метода падающего шарика вискозиметрии.
При использовании вискозиметра Гепплера возникают трудности, связанные с
непрозрачностью вязкой среды либо трубки вискозиметра. В этом случае сложно
определить местонахождение шарика; с целью преодоления такого характера
трудностей были сделаны попытки внедрения в шарик вискозиметра материалов,
излучающих рентгеновские лучи. В настоящее время в вискозиметрах типа вискозиметров
с падающим шариком применяется способ регистрации магнитных полей. Вискозиметр
Гепплера и подобные ему вискозиметры используются для измерения вязкости
различных сред и позволяют вести измерения с погрешностью в пределах 1-3%.
Вискозиметр Гепплера, снабжённый термостатирующей баней, часто характеризуется
как универсальный высокотемпературный вискозиметр [49].
Вискозиметр Брукфильда
Вискозиметр Брукфильда - высокоточный прибор для поточного измерения
вязкости сред. Поточные промышленные вискозиметры Брукфильд (Brookfield)
используют в своём устройстве ротационный метод вискозиметрии и широко
применяются на нефтяных и газовых скважинах, где необходим непрерывный контроль
вязкости сред.
Вискозиметр капиллярный
Капиллярный вискозиметр представляет собою один или несколько резервуаров
данного объёма с отходящими трубками малого круглого сечения, или капиллярами.
Принцип действия капиллярного вискозиметра заключается в медленном истечении
жидкости из резервуара через капилляр определенного сечения и длины под влиянием
разности давлений. В автоматических капиллярных вискозиметрах жидкость
поступает в капилляр от насоса постоянной производительности.
Суть опыта при определении вязкости состоит в измерении времени
протекания известного количества жидкости при известном перепаде давлений на
концах капилляра. Дальнейшие расчёты ведутся на основании закона Пуазейля.
Капиллярный вискозиметр за счёт простоты устройства и возможности
получения точных значений вязкости нашёл широкое распространение в
вискозиметрии жидкостей (масел, расплавов). Несмотря на кажущуюся хрупкость
тонких капилляров, многие капиллярные вискозиметры являются
высокотемпературными вискозиметрами.
Однако в случае, если температура вязкой жидкости достаточна высока,
возникает трудность в подборе материала вискозиметра, который может как
изменить форму (изменение диаметра капилляра вискозиметра недопустимо, см.
Капиллярный метод вискозиметрии), так и вступить во взаимодействие с вязкой
жидкостью, что плохо отразится на точности данных измерения вязкости.
Относительная погрешность измерений при использовании капиллярного
вискозиметра составляет 0,1-2,5%
Вискозиметр ротационный
В вискозиметре ротационном исследуемая вязкая среда помещается в зазор
между двумя соосными телами правильной геометрической формы (цилиндры, конусы,
сферы или их сочетания). Одно из тел, называемое ротором, приводится во
вращение с постоянной скоростью, другое остаётся неподвижным. Принцип действия
вискозиметра ротационного основывается на нескольких положениях. Вращательное
движение от одного тела (ротора) передается жидкостью к другому телу. Теория
ротационного метода вискозиметрии предполагает отсутствие проскальзывания
жидкости у поверхностей тел. Следовательно, момент вращения, передаваемый от
одной поверхности к другой, является мерой вязкости жидкости.
Суть опыта при определении вязкости состоит в измерении крутящего момента
при заданной угловой скорости или по угловой скорости при заданном крутящем
моменте. Для этих целей вискозиметр ротационный снабжён динамометрическим
устройством. Устройства, применяемые в вискозиметрах ротационных для измерения
моментов и угловых скоростей, подразделяются на механические и электрические.
Дальнейшие расчёты ведутся на основании теории метода ротационной
вискозиметрии.
В настоящее время наиболее распространены вискозиметры
электро-ротационные: внутренний цилиндр, погруженный в вязкую среду, приводится
во вращение электродвигателем. Вращающийся с постоянной скоростью ротор
вискозиметра при погружении в жидкость или расплав встречает сопротивление
равномерному вращательному движению, на валу двигателя возникает тормозящий
момент, прямо пропорциональный вязкости среды, что вызывает соответствующее
изменение электрических регистрируемых характеристик двигателя.
Следует отметить важную особенность вискозиметров ротационных:
выполненный из термостойких материалов, вискозиметр ротационный, может
представлять из себя высокотемпературный вискозиметр.
Вискозиметры ротационные используются для измерения вязкости сред при
температурах от -60°C (масла) до +2000°C (расплавы металлов и силикатов) и
позволяют вести измерения с погрешностью в пределах ±3-5%.
Чашечные вискозиметры
Чашечные вискозиметры - приборы для измерения вязкости жидких сред,
выполненные в форме воронки (или чашечки) и использующие в своём устройстве
капиллярный метод вискозиметрии.
В нефтянной промышленности используются как ротационные вискозиметры
системы Brookfield, так и полевые чашечные капиллярные вискозиметры,
позволяющие с достаточной степенью точности определить вязкие свойства нефти.
Ультразвуковые вискозиметры
Существует несколько типов ультразвуковых вискозиметров. Один из них,
наиболее часто применяющийся, основан на принципе демпфирования. Если
металлический стержень, помещенный в жидкость, коротким ударом заставить
колебаться, то через некоторое время колебания затухнут. При этом скорость
спадания амплитуды будет зависеть от вязкости среды. Чем больше вязкость, тем
быстрее затухают колебания.
Ультразвуковой вискозиметр прост по устройству, малогабаритен, надежен в
эксплуатации и обеспечивает достаточную точность измерения. Он состоит из трех
основных узлов: датчика-зонда, электронного блока и соединительного кабеля.
Наиболее важный элемент прибора - датчик-зонд. Чувствительным элементом
датчика служит плоская прямоугольная пластинка из ферромагнитного или
пьезоэлектрического материала толщиной 0,2-0,4 миллиметра. Такие вискозиметры
применяются в нефтяной промышленности.
Устройство состоит из датчика 1 и электронного блока 2. Датчик с помощью
резьбового соединения 9 и уплотнительного кольца 8 устанавливается в бак с
контролируемой жидкостью или в трубу, по которой прокачивается жидкость. Датчик
содержит корпус 3, в котором закреплен через демпфирующий узел 5
магнитострикционный элемент 4 в его узловой точке.
Магнитострикционный элемент представляет собой тонкую пластинку размером
37 мм ×
6 мм ×
0,03 мм, выполненную из
аморфного металлического стекла Metglas 2826 MB.
На внешней поверхности корпуса 3 (в кольцевой канавке, охватывающей
магнитострикционный элемент в его центральной части) намотана электромагнитная
катушка 6 симметрично относительно концов магнитострикционного элемента 4, при
этом витки катушки охватывают магнитострикционный элемент.
В корпусе 3 также вмонтирован измеритель температуры 7 на расстоянии h=1
мм (не более 3 мм) от магнитострикционного элемента 4. Измеритель температуры
представляет собой термометр сопротивления, в частности термометр платиновый
(тип MR518G, фирмы Heraeus) с диаметром 1,8 мм и длиной 5 мм, который
обеспечивает точность измерения  .
.
Корпус имеет отверстия для протекания жидкой среды к измерителю
температуры 7 и магнитострикционному элементу 4. Торец корпуса закрыт защитной
сеткой 13. Датчик 1 соединен с электронным блоком 2 электрическим кабелем 10.
Последовательность выполнения операций измерения вязкости.
Тема вискозиметрии и её методов мало распространена и фактически не
упоминается в повседневной жизни, но, по истине, прибор вискозиметр занимает
достойное место в списке гениальных изобретений человечества [53].
Измерение испаряемости.
Испаряемость - свойство нефти терять легкие фракции. С явлением испарения
нефтей и нефтепродуктов приходится считаться главным образом при их хранении и
транспортировке.
Поскольку нефть и нефтепродукты представляют собой весьма сложные смеси
различных углеводородов и неуглеводородных соединений с разными температурами
кипения, то речь может идти лишь о температурных пределах, в которых выкипает
та или иная смесь. Температура кипения нефти колеблется в интервале 50-550°С.
Нефть, как и любая жидкость, при определенной температуре закипает и
переходит в газообразное состояние. Различные ее компоненты переходят в
газообразное состояние при различной температуре кипения. Легкие нефти вскипают
при 50-100°С, тяжелые - при температуре более 100°С. Самая высокая температура
кипения у парафинов, поэтому при понижении температуры они выпадают из нефти в
осадок. При извлечении нефти из высокотемпературных пластовых условий на земную
поверхность по стволу буровой скважины парафины откладываются на стенках труб.
Различие температур кипения углеводородов, входящих в состав нефтей,
широко используется на практике для разделения нефти на температурные фракции
(франц. «фрактьон» - доля, часть от лат. «фракцио» - излом, ломание). Так, при
нагревании нефти до 180-200 °С выкипают углеводороды бензиновой фракции, при
200-250 °С - лигроиновой, при 250-315 °С - керосиновогазойлевой и при 315-550
°С - масляной. Остаток представлен гудроном. В состав бензиновой и лигроиновой
фракций входят углеводороды, содержащие 6-10 атомов углерода. Керосиновая
фракция состоит из углеводородов с С 11 - C 1, газойлевая - с C l4 C 17 и т. д.
Обычно нефти плотностью менее 0,9 начинают кипеть при температуре,
которая ниже 100°С. Температура начала кипения нефти зависит от ее химического
состава. Так, при одной и той же плотности нафтеновые и ароматические
углеводороды кипят при более низкой температуре, чем метановые.
В 2003 г. в Казани Научно-производственным центром «СКПнефть» разработана
Методика выполнения измерений МИ 2795-2003 «Потенциальные потери углеводородов
в нефти от испарения».
Данная Методика распространяется на потенциальные потери углеводородов от
испарения, которые могут возникнуть в системах подготовки и транспорта при
поступлении в них нефти с давлением насыщенных паров (ДНП) выше заданной
величины, в диапазоне 0,15 ... 2,00 % масс, и устанавливает методику выполнения
их измерений.
При выполнении измерений применяют следующие средства измерений и
вспомогательные устройства:
· Автоматический лабораторный прибор АЛП-01 ДП. (зарегистрирован в
Государственном реестре средств измерений под номером 16774-03).
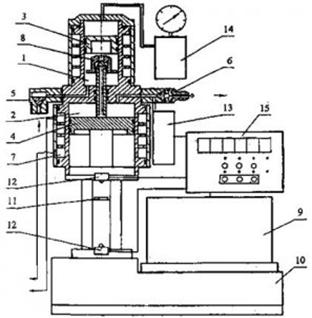
Рис.6.16. Автоматический лабораторный прибор АЛП-01 ДП.
Прибор функционально состоит из измерительного блока с приводом и узла управления.
Измерительный блок включает в себя пробоотборную (1) и измерительную (2) камеры
с поршнями (3) и (4), входным (5) и выходным (6) клапанами, термостатирующими
рубашками (7) и вспрыскным клапаном (8), а также имеет датчик давления (13) и
подпорную газовую камеру (14). Привод измерительного блока состоит из двигателя
(9), одноступенчатого редуктора (10), винтовой ходовой пары с визиром (11) и
микровыключателями (12). Блок управления (15), соединенный с приводом, датчиком
давления, позволяет проводить измерения в ручном и автоматическом режимах.
Принцип действия прибора основан на герметичном отборе пробы нефти или
нефтепродукта, расширении измерительной камеры до объема, необходимого для
создания заданного соотношения фаз, впрыске в нее отобранной пробы и приведении
тем самым системы «жидкость - пар» в термодинамическое равновесие, регистрации
давления.
· Индивидуальный пробоотборник ИП-1 по ТУ 3663-003-12754454-97 (для нефти,
содержащей воду в свободном состоянии и газ. Предназначен для отбора проб нефти
и нефтепродуктов, их автоматической подачи в прибор на анализ. Пробоотборник
может работать как в горизонтальном, так и в вертикальном положении.
Таблица 6.2.
Технические характеристики пробоотборника ИП-1
|
Объем отбираемой пробы, мл
|
250.
|
|
Максимальное давление отбора, МПа
|
2,5.
|
|
Масса, кг, не более
|
3,5.
|
|
Габаритные размеры, мм не более
|
140х380х150.
|
Пробоотборник состоит из заборной камеры и пресса. Заборная камера имеет
в своем составе штуцер входной (1), нижнюю часть рабочего цилиндра (2),
выполненную из оргстекла, верхнюю стальную часть цилиндра (3), штуцер выходной
(10), манометр (11), вентиль входной (12), вентиль выходной (13) и опору (14).
Пресс включает в себя: линейную шкалу (4), штурвал (5), визир (6), шток (7),
пружину (8) и поршень (9). На нижней части рабочего цилиндра указывают номер
пробоотборника и значения давлений, при которых пружина начинает сжиматься Pmin
и разжиматься Рmax.
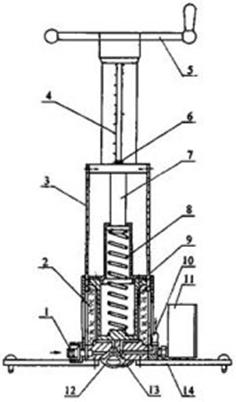
Рис.6.18. Индивидуальный пробоотборник ИП-1.
При работе с пробоотборником проверяют, чтобы давление в трубопроводе не
превышало 2,5 МПа. Затем, последовательно соединяют устройство, из которого
отбирают пробу, с помощью шланга с входным штуцером. Надевают резиновую трубку
на выходной штуцер и соединяют ее со сборной емкостью, связанной с атмосферой.
Открывают заборное устройство и входной вентиль пробоотборника. Приоткрывают
выходной вентиль, поддерживая тонкую струю жидкости, сливают в емкость около 50
мл нефти и закрывают выходной вентиль. После истечения 30 с закрывают входной
вентиль и путем открытия выходного вентиля выпускают нефть до тех пор, пока
давление не снизится до Р = Рmax. Движением штока вверх до упора
проводят разжатие пружины, затем открывают входной вентиль и снова выполняют
операцию, когда по истечении 30 с закрывают входной вентиль и путем открытия
выходного вентиля выпускают нефть до тех пор, пока давление не снизится до Р =
Рmax. Если в заборную камеру попала свободная вода или газ, что
определяют визуально через прозрачную нижнюю часть рабочего цилиндра, их
выпускают путем установки пробоотборника в горизонтальное положение и открытия
выходного вентиля.
· Индивидуальный пробоотборник ИП-3 по ТУ 3663-003-12754454-97 (для нефти,
не содержащей воду в свободном состоянии и газ).
Предназначен для отбора проб нефти, газа и нефтепродуктов, их
автоматической подачи в прибор на анализ при заданной температуре.
Пробоотборник может работать как в горизонтальном, так и в вертикальном
положении.
Таблица 6.3.
|
Объем отбираемой пробы, мл
|
250.
|
|
Максимальное давление отбора, МПа
|
6,0.
|
|
Начальное давление для перемещения поршня, Р1МПа
|
0,1 ... 0,2.
|
|
Конечное давление для перемещения поршня, Р2,
МПа
|
0,2 ... 0,3.
|
|
Масса, кг, не более
|
3,5.
|
|
Габаритные размеры, мм, не более
|
350х195х135.
|
Пробоотборник состоит из пробоотборной камеры и узла пресса.
Пробоотборная камера включает в себя входной штуцер (1), цилиндр (2), выходной
штуцер (9), термостатирующую рубашку (10), манометр (11), входной вентиль (12),
выходной вентиль (13) и установочные опоры (14).
Узел пресса состоит из корпуса с линейной шкалой (3), рукоятки (4),
визира (5), винта (6) с ходовой гайкой (15), пружины (7) и поршня (8).
Порядок работы. Подсоединяют пробоотборник к пробозаборному устройству с
помощью шланга высокого давления. Надевают на выходной штуцер (9) резиновую
трубку, направленную в открытую сборную емкость. Открывают пробозаборное
устройство и вентили (12) и (13) на пробоотборнике. После слития в емкость
около 50 мл продукта закрывают выходной вентиль (13), дают выдержку 30 с,
закрывают входной вентиль (12) и отсоединяют пробоотборник. Если температура
отбираемого продукта (t) ниже максимально ожидаемой температуры (tmax)
при транспортировке и хранении, то, приоткрывая выходной вентиль (13), сливают
0,25(tmax - t) мл продукта.
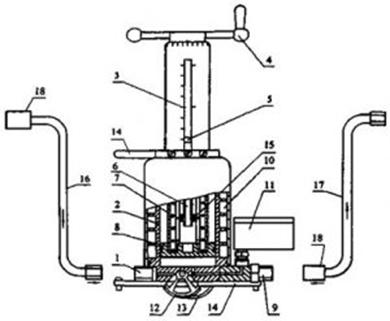
Рис. 6.19. Индивидуальный пробоотборник ИП-3:
- входной штуцер; 2 - цилиндр; 3 - корпус поршня с линейной шкалой; 4 -
рукоятка; 5 - визир; 6 - ходовой винт; 7 - пружина; 8 - поршень; 9 - выходной
штуцер; 10 - термостатирующая рубашка; 11 - манометр; 12 - входной вентиль; 13
- выходной вентиль; 14 - установочные опоры; 15 - гайка; 16 - положение шланга
высокого давления при отборе пробы; 17 - положение шланга высокого давления при
измерении ДНП; 18 - фильтр.
· Испарительная камера ИК-2. Предназначена для испарения нефти при
определении зависимости давления насыщенных паров от массы выделившихся
углеводородов.
Таблица 6.4.
Технические характеристики испарительной камеры ИК-2
|
Вместимость камеры, мл, не менее
|
170.
|
|
Максимальное давление, МПа
|
0,5.
|
|
Масса, г, не более
|
350.
|
|
Габаритные размеры, мм, не более
|
|
Испарительная камера состоит из испарительного стакана (1) и крышки (2).
Испарительный стакан включает в себя нижний поршень (3) и выходной клапан (4).
Крышка в своем составе имеет трубку (5) с входным клапаном (6), верхний поршень
(7), стяжные толкатели (8), вспомогательные толкатели (9), крепежные винты (10)
и распределительный вентиль (11).
Рис. 6.20. Испарительная камера ИК-2.
Работа с испарительной камерой. Перед началом работ чистый сухой стакан
(1) вместе с нижним поршнем (3) и выходным клапаном (4) взвешивают. Нижний
поршень (3) с помощью стяжных толкателей (8) соединяют с верхним поршнем (7).
Стакан (1) соединяют с помощью крепежных винтов (10) с крышкой (2) и
соединенные поршни (3), (7), при открытых входном (6) и выходном (4) клапанах,
с помощью стяжных толкателей (8) опускают в крайнее нижнее положение.
Посредством распределительного вентиля (11) собранную испарительную камеру
подключают к пробоотборнику и прибору.
Заполнение испарительной камеры. При открытом выходном клапане (4) и
закрытом входном клапане (6) открывают распределительный вентиль (11).
После отбора проб нефти в прибор, приоткрывают входной клапан (6), через
выходной клапан (4) сливают около 5 мл нефти и закрывают его. Полностью
открывают входной клапан (6) и следят за заполнением испарительного стакана (1)
нефтью по подъему стяжных толкателей (8). После достижения стяжными толкателями
(8) крайнего верхнего положения закрывают вначале распределительный вентиль
(11), а затем входной клапан (6).
Процесс испарения и отбора проб на анализ включает в себя следующие
операции. Откручивают крепежные винты (10) и, придерживая одной рукой стакан,
другой отворачивают стяжные толкатели (8). Плавно опускают испарительный стакан
(1) на весы, фиксируют общую массу стакана с нефтью и дают выдержку во времени.
После того, как масса нефти уменьшится на нужную величину, открывают входной
клапан (6), отбирают в прибор около 8 мл нефти и закрывают входной клапан (6).
После пропускания через прибор 8 мл нефти, вновь открывают входной клапан (6),
отбирают в прибор 20 мл пробы, закрывают входной клапан (6) и фиксируют массу
стакана с оставшейся нефтью. Пока идет второй цикл испарения, проводят
измерения ДНП на приборе. Последние операции проводят пять раз, затем
испарительную камеру отсоединяют, разбирают, промывают и сушат.
При высоких газосодержаниях возможна принудительная замена находящейся в
трубке газонефтяной смеси на нефть, разгазированную в испарительном стакане при
первом цикле испарения, с применением вспомогательных толкателей.
· Термостат с диапазоном регулирования температуры от 0 до 60 °C и обеспечивающий
стабильность поддержания температуры ± 0,1 °C.
· Весы лабораторные микрокомпьютерные 4-го класса модели
ВЛМК-550 или ВЛТЭ-500 с погрешностью не более 20 мг.
· Барометр-анероид типа БАММ-1 по ТУ 2511-1513.
Барометр-анероид БАММ-1 лабораторный метеорологический предназначен для
измерения давления в наземных условиях при температуре окружающего воздуха от 0ºС до +40оС и относительной влажности
воздуха до 80%.
Технические характеристики:
Диапазон измерений - от 80кПа до 106кПа (от 600мм.рт.ст. до 800мм.рт.ст.).
Пределы допускаемой абсолютной погрешности измерений прибора ±0,2кПа
(±1,5мм.рт.ст.).
Предел допускаемой дополнительной погрешности - ±0,5кПа (±3,75мм.рт.ст.).
Цена деления шкалы давления прибора 0,1кПа (0,5мм.рт.ст.).
Габаритные размеры: диаметр - 152мм; высота - 90мм.
Допускается применение других средств измерений утвержденного типа с
аналогичными или лучшими метрологическими характеристиками.
Метод измерений основан на том, что в процессе испарения из нефти
преимущественно выделяются легкие углеводороды, вследствие чего ДНИ в нефти
снижается, и заключается в установлении зависимости ДНИ от количества
выделившихся углеводородов с последующим определением их массовой доли по
величине ДНИ на входе и выходе объекта.
Таблица 6.5.
При выполнении измерений соблюдают следующие условия:
|
- температура окружающего воздуха, °C
|
25 ± 10;
|
|
- температура исследуемой нефти при измерениях ДНП, °C
|
37,8;
|
|
- температура испаряемой нефти, °C
|
25 ± 10.
|
Измерение сжимаемости.
Сжимаемость - способность нефти (газа, пластовой воды) изменять свой
объем под действием давления. При увеличении давления нефть сжимается.
Уменьшение объёма нефти при увеличении давления характеризуется
коэффициентом сжимаемости (βн) или объёмной упругости:
 , (6.12)
, (6.12)
где ∆V - уменьшение объёма нефти; V - исходный объём нефти; ∆Р
- увеличение давления.
Из выражения следует, что коэффициент сжимаемости (βн) характеризует относительное изменение единицы объёма
нефти при изменении давления на единицу.
Нефти, не содержащие растворённого газа, обладают сравнительно низким
коэффициентом сжимаемости (βн ≈ 0,4-0,7 ГПа-1), а легкие нефти со
значительным содержанием растворенного газа - повышенным коэффициентом
сжимаемости (до 14 ГПа-1, приставка Г - гига → увеличение в 109).
Коэффициент сжимаемости нефти зависит от температуры (рис. 6.24).
Возрастание пластовой температуры вызывает увеличение коэффициента сжимаемости.
Как видно из графиков, с уменьшением пластового давления до давления
насыщения коэффициент сжимаемости нефти растёт, и такая закономерность
продолжается вплоть до давления насыщения. Коэффициент сжимаемости нефти
зависит от состава нефти и величины газового фактора.
С увеличением плотности нефти коэффициент сжимаемости уменьшается, а с
увеличением количества растворенного углеводородного газа в ней коэффициент
сжимаемости нефти возрастает.
Высокие коэффициенты сжимаемости свойственны нефтям, которые находятся
при пластовых условиях, близких к критическим, в частности свойственны нефтям,
окаймляющим газоконденсатные залежи
Для пластовых нефтей коэффициенты сжимаемости нефти  колеблются в пределах 0,414,0 ГПа-1,
коэффициент
колеблются в пределах 0,414,0 ГПа-1,
коэффициент  определяют пересчетом по формулам, более точно получают его
путем лабораторного анализа пластовой пробы нефти.
определяют пересчетом по формулам, более точно получают его
путем лабораторного анализа пластовой пробы нефти.
Из-за наличия растворенного газа в пластовой нефти, она увеличивается в
объеме (иногда на 50 ÷ 60 %). Отношение объема жидкости в пластовых условиях
к объему ее в стандартных условиях называют объемным коэффициентом ϵ
(эпсилон). Величина, обратная объемному коэффициенту, называется пересчетным
коэффициентом (тета):
 . (6.13)
. (6.13)
Этот коэффициент служит для приведения объема пластовой нефти к объему
нефти при стандартных условиях.
Используя объемный коэффициент, можно определить усадку нефти И, т. е. на
сколько изменяется ее объем на поверхности по сравнению с глубинными условиями:
 . (6.14)
. (6.14)
В лабораторных условиях сжимаемость, как правило, определяется в процессе
PVT-анализа (Pressure - давление, Volume - объём, Temperature -температура)
пластовой нефти или при анализе газосодержания (см. ниже).
Измерение газосодержания.
Газосодержание -количество газа, содержащееся в одном кубическом метре
нефти.
В 2000 г. Всероссийским научно-исследовательским институтом расходометрии
(ГНМЦ ВНИИР) ГОСстандарта России разработаны рекомендации, устанавливающие
методику выполнения измерений (МВИ) остаточного газосодержания, включающего
остающийся в нефти после сепарации свободный и растворенный газ «МИ 2575-2000»
[54].
При выполнении измерений свободного газа применяют прибор УОСГ-100 СКП.
Рис. 6.26. Прибор УОСГ-100 СКП 1 - пробоотборная камера; 2 -
термостатирующая рубашка; 3 - клапанный узел; 4 - манометрический узел; 5 -
плунжер; 6 - линейная шкала; 7 - визир; 8 - лимб; 9 - корпус.
Рис. 6.27. Схема подключения прибора УОСГ - 100 СКП к трубопроводу (вид
сверху)
При выполнении измерений растворенного газа применяют следующие средства
измерений и вспомогательные устройства:
автоматический лабораторный прибор АЛП-01 ДП, который предназначен для
измерения содержания в нефти растворенного газа (МИ 2575-2000) и давления
насыщенных паров (ДНП) нефти и нефтепродуктов (ГОСТ Р 8.601-2003) [54-55].
Прибор применяется при оценке качества товарной и стабильности сырой
нефтей, определении количества выделяющихся в резервуарах углеводородов и
поправочных коэффициентов на наличие в нефти растворенного газа. Функционально
состоит из измерительного блока с приводом и узла управления (рис. 6.28).
Измерительный блок имеет в своем составе: дозировочную (1) и
измерительную (2) камеры с подвижными поршнями (3, 4); входной (5) и выходной
(6) клапаны; микровыключатели (7); узел турбулизации с газовой камерой (8),
заполненной азотом, манометром (9) и вентилем (10); термостатирующую рубашку
(11); датчик давления (12); электропривод (13); фильтр (15).
Узел управления (14) связан с электроприводом (13), датчиком давления
(12) и микровыключателями (7). Он обеспечивает работу прибора в режимах
измерений ДНП и растворенного газа.
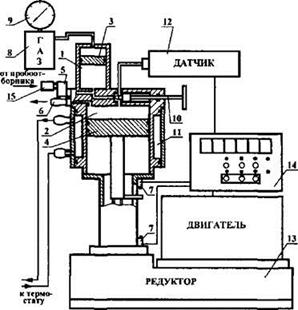
Рис. 6.28. Автоматический лабораторный прибор АЛП-01 ДП
термостат для поддержания температуры в диапазоне от 0 до 60 °С с
погрешностью не более 0,1 °С (рассматривался ранее);
индивидуальный пробоотборник ИП-1 вместимостью не менее 230 мл
(рассматривался ранее).
Используемые методы:
· Метод измерений свободного газа заключается в изотермическом сжатии до
заданного давления отобранной пробы нефти, определении уменьшения ее объема и
последующей обработке полученных данных.
При этом по полученным значениям Р и ∆V проводят
вычисление величины относительного количества свободного газа
 (6.15)
(6.15)
где Vк - объем пробы нефти, равный
вместимости пробоотборной камеры, по паспорту, 10-6 ×
м3;0
- первоначальное избыточное давление в камере, равное давлению в трубопроводе,
МПа;
 - коэффициент сжимаемости нефти в
пробоотборной камере прибора, 1/МПа.
- коэффициент сжимаемости нефти в
пробоотборной камере прибора, 1/МПа.
Результаты измерений оформляют записью в журнале по
форме, приведенной в таблице.
Таблица 6.2.
|
Давление в трубопроводе Р0, МПа
|
Коэффициент сжимаемости, b, 1/МПа
|
Вместимость пробоотборной камеры, Vк 10-6
м3
|
Изменение объема пробы, ∆V, 10-6 м3
|
Давление сжатия, Р, МПа
|
Содержание свободного газа, Vсг, %
|
|
1
|
2
|
3
|
4
|
5
|
6
|
Среднее значение содержания свободного газа
рассчитывается по формуле
 . (6.16)
. (6.16)
Содержание свободного газа до 0,1 % включительно
оценивается как его отсутствие.
· Метод измерения растворенного газа заключается в герметичном отборе
пробы, впрыске в измерительную камеру прибора дозированных порций нефти с
созданием в камере термодинамического равновесия системы «нефть-газ»
последовательно при различных соотношениях фаз так, чтобы равновесное давление
было максимально приближено с большей и меньшей стороны к заданному, и
последующей обработке полученных данных.
Величину растворенного газа при заданных значениях
давления Р0 и температуре t0 определяют по формулам:
 . (6.17)
. (6.17)
Измерения газового фактора.
Газовый фактор - это:
· отношение полученного из месторождения через скважину количества газа (в
м3), приведённого к атмосферному давлению и температуре 20 , к количеству добытой за то же
время нефти (в т или м3) при том же давлении и температуре;
· показатель расхода пластовой энергии и определения газовых
ресурсов месторождения.
Для нефтяных месторождений России газовый фактор изменяется от 20 до 1000
м3/т. По закону Генри, растворимость газа в жидкости при данной
температуре прямо пропорциональна давлению. Давление, при котором газ находится
в термодинамическом равновесии с нефтью, называется давлением насыщения. Если
давление ниже давления насыщения, из нефти начинает выделяться растворенный в
ней газ. Нефти и пластовые воды с давлением насыщения, равным пластовому,
называются насыщенными. Нефти в присутствии газовой шапки, как правило,
насыщенные.
Специалисты используют мобильные газохроматографы и различные приборы для
измерения расхода газа. Анализ химических компонентов, содержащихся в попутном
нефтяном газе (ПНГ), позволяет сделать вывод о характере происхождения газа -
либо это чисто нефтяной газ, либо смесь газов дополнительных источников (газ
газовых шапок, газ возврата). Зная характер происхождения газа, можно точнее
спрогнозировать динамику изменения рабочего газового фактора и, соответственно,
объёма добычи попутного газа.
6.1.2 Измерение физико-химических свойств
пластовых вод
Пластовые воды являются обычным спутником нефти. Вода обладает
способностью смачивать породу и потому она обволакивает тончайшей пленкой
отдельные зерна ее, а также занимает наиболее мелкие поровые пространства.
Вода, залегающая в одном и том же пласте вместе с нефтью или газом, называется
пластовой. В нефтегазоносных залежах распределение жидкостей и газов
соответствует их плотностям: верхнюю часть пласта занимает свободный газ, ниже
залегает нефть, которая подпирается пластовой водой. Однако пластовая вода в
нефтяных и газовых залежах может находиться не только в чисто водяной зоне, но
и в нефтяной и газовой, насыщая вместе с нефтью и газом продуктивные породы
залежей. Эту воду называют связанной или погребенной.
Осадочные породы, являющиеся нефтяными коллекторами, формировались, в
основном, в водных бассейнах. Поэтому еще до проникновения в них нефти поровое
пространство между зернами породы было заполнено водой. В процессе
тектонических вертикальных перемещений горных пород (коллекторов нефти и газа)
и позднее углеводороды мигрировали в повышенные части пластов, где происходило
распределение жидкостей и газов в зависимости от плотности. При этом вода
вытеснялась нефтью и газом не полностью, так как основные минералы, входящие в
состав нефтесодержащих пород, гидрофильные, т. е. лучше смачиваются водой, чем
нефтью. Поэтому вода при вытеснении ее нефтью в процессе образования нефтяных
залежей частично удерживалась в пластах в виде тончайших пленок на поверхности
зерен песка или кальцита и в виде мельчайших капелек в точках контакта между
отдельными зернами и в субкапиллярных каналах. Эта вода находится под действием
капиллярных сил, которые значительно превосходят наибольшие перепады давлений,
возникающие в пласте при его эксплуатации, и поэтому остается неподвижной при
разработке нефтегазовой залежи.
В состав вод нефтяных месторождений входят, главным образом, хлориды,
бикарбонаты и карбонаты металлов натрия, кальция, калия и магния. Содержание
хлористого натрия может доходить до 90 % от общего содержания солей. Иногда
встречается сероводород и в виде коллоидов окислы железа, алюминия и кремния.
Часто присутствует йод и бром, иногда в таком количестве, что вода может быть
объектом их промышленной добычи.
Воды нефтяных месторождений отличаются от поверхностных или отсутствием
сульфатов (соединений SO4), или их слабой концентрацией. Помимо
минеральных веществ, в водах нефтяных месторождений содержатся некоторые
минеральные вещества, углекислота, легкие углеводороды, нафтеновые и некоторые
жирные кислоты.
Воды нефтяных месторождений могут содержать бактерии органических
веществ, которые придают различную окраску (розовую, красную, молочную).
Отношение объема воды, содержащейся в породе, к объему пор этой же породы
называется коэффициентом водонасыщенности
 , (6.18)
, (6.18)
где ηВ
- коэффициент водонасыщенности; VB - объем воды в породе;  - объем пор.
- объем пор.
Отношение объема нефти, содержащейся в породе, к общему объему пор
называется коэффициентом нефтенасыщенности
 , (6.19)
, (6.19)
где  - коэффициент нефтенасыщенности;
- коэффициент нефтенасыщенности;  - объем нефти в породе; - объем пор.
- объем нефти в породе; - объем пор.
Содержание связанной воды в породах нефтяных залежей колеблется от долей
процента до 70 % объема пор и в большинстве коллекторов составляет 20 30 % этого объема.
Исследованиями установлено, что при содержании в пласте воды до 35 40 % и небольшой проницаемости пород
пласта из скважин может добываться безводная нефть, так как связанная вода в
этом случае в пласте не перемещается.
В качестве основных физико-химических свойств пластовых вод, интересующих
нас с точки зрения проведения измерений, выделим следующие свойства:
· минерализация;
· плотность;
· сжимаемость;
· растворимость газов;
· электропроводность;
· вязкость.
Измерение минерализации.
Минерализация воды характеризуется количеством растворенных в ней
минеральных солей. Степень минерализации вод часто выражается их соленостью, т.
е. содержанием растворенных в воде солей, отнесенных к 100 г раствора.
Пластовые воды обычно сильно минерализованы. Степень их минерализации
колеблется от нескольких сот граммов на 1 м3 в пресной воде до 80
кг/м3 в сильноминерализованных водах и до 300 кг/м3 - в
рапах.
Воды нефтяных месторождений делятся на два основных типа: жесткие и
щелочные. На практике для классификации вод принимают классификацию Пальмера,
который рассматривает воду как раствор солей. Каждая соль, растворяясь в воде,
придает ей определенные свойства. Например, раствор поваренной соли делает воду
нейтральной. Жесткость придают воде сульфаты кальция и магния, образующие
"вторичную соленость".
В качестве измерителей минерализации можно использовать такие современные
средства как солемеры.
Измерение плотности пластовой воды.
Плотность воды зависит от степени ее минерализации и от температуры и
составляет примерно от 1010 до 1080 кг/м3 и
более. В большинстве случаев она меньше плотности в поверхностных условиях (не
более чем на 20%), поскольку пластовая температура выше стандартной. Однако в
условиях пониженных пластовых температур, например, в зоне развития
многолетнемерзлых пород, плотность воды может быть равной плотности воды в
поверхностных условиях или даже больше ее.
Измерение сжимаемости пластовой воды.
Коэффициент сжимаемости воды, т. е. изменение единицы объема ее при
изменении давления на 0,1 МПа в пластовых условиях, находится в пределах 3,7·10-5
5·10-5/0,1 МПа в зависимости от температуры и абсолютного давления.
Содержание в воде растворенного газа повышает ее сжимаемость.
Измерение растворимости пластовой воды
Растворимость газов в воде значительно ниже растворимости их в нефтях.
Рост минерализации воды способствует уменьшению растворимости в ней газа.
Измерение электропроводности пластовой воды
Электропроводность находится в прямой зависимости от минерализации вод.
Пластовые воды являются электролитом. Мерой электропроводности служит удельное
электрическое сопротивление, за единицу измерения которого принят 1 Ом×м. Знание удельного сопротивления
подземных вод необходимо для интерпретации материалов электрометрии скважин.
Измерение вязкости пластовой воды
Вязкость пластовой воды при 20 составляет 1мПа·с, а при 100 0,284 мПа·с. Вязкость пластовой воды
зависит в первую очередь, от температуры, а также от минерализации и
химического состава. Газосодержание и давление оказывают меньшее влияние.
Средства и методы измерения физико-химических свойств пластовых вод во
многом аналогичны измерениям физико-химических свойств нефти [56].
6.2 Измерение физико-химических свойств газа
Природные углеводородные газы находятся в недрах земли или в виде
самостоятельных залежей, образуя чисто газовые месторождения, либо в
растворенном виде содержится в нефтяных залежах. Такие газы называются
нефтяными или попутными, так как их добывают попутно с нефтью.
Для измерения физико-химических параметров газа на узлах учета
монтируются целые комплексы приборов учета, которые носят название
измерительно-вычислительных комплексов (ИВК). Перечень необходимых приборов,
которыми должен быть оснащен измерительный комплекс (рис. 6.31), зависит от
измеряемой среды и методов, принятых для измерения или расчета ее плотности и
вязкости.
Химические свойства газа.
Углеводородные газы нефтяных и газовых месторождений представляют собой
газовые смеси, состоящие главным образом из предельных углеводородов метанового
ряда СnН2n+2, т. е. из метана СН4 и его
гомологов - этана С2Н6, пропана С3Н8,
бутана С4Н10 и других, причем содержание метана в газовых
залежах преобладает, доходя до 9899 %.
Кроме углеводородных газов, газы нефтяных и газовых месторождений
содержат углекислый газ, азот, а в ряде случаев сероводород и в небольших
количествах редкий газ, такой как гелий, аргон и др.
Рассмотрим физические свойства природного газа.
1. Согласно ГОСТ 30319.0-96 плотность газа (или смеси газов) есть
отношение массы этого газа к занимаемому им объему. Плотность газов существенно
зависит от давления и температуры. Она может измеряться в абсолютных единицах
(г/см3, кг/м3) и в относительных. При давлении 0,1 МПа и
температуре 0 плотность газов примерно в 1000 раз меньше плотности
жидкости и изменяется для углеводородных газов от 0,7 до 1,5 кг/м3
(в зависимости от содержания в газе легких и тяжелых углеводородов).
Относительной плотностью газа называют отношение плотности газа при атмосферном
давлении (0,1 МПа) и стандартной температуре (обычно 0 ) к плотности воздуха при тех же
значениях давления и температуры. Для углеводородных газов относительная
плотность по воздуху изменяется в пределах 0,61,1.
Плотность измеряемой среды может быть непосредственно измерена с помощью
поточных плотномеров или плотномеров, предназначенных для анализа отобранных
проб измеряемой среды, а также рассчитана по измеренным параметрам потока,
перечень которых зависит от выбранного метода расчета и вида среды.
Если плотность определяется на основе анализа проб измеряемой среды, то
для обеспечения представительности отобранных проб следует руководствоваться
ГОСТ 18917-82 и ГОСТ 14921-78.
Отобранная проба может быть использована для непосредственного измерения
плотности с последующей корректировкой к условиям перед сужающим устройством
или для анализа состава среды, который используется при расчетных методах
определения плотности.
При измерении многокомпонентных сред, состав которых меняется в процессе
измерений, необходимо учитывать, что применение метода определения плотности на
основе отбора проб требует оценки дополнительной погрешности, вызванной
принятием состава измеряемой среды условно постоянным параметром. Считается,
что снижения данной погрешности можно добиться путем повышения частоты отбора
проб. Однако если компонентный состав меняется существенно и носит случайный
характер, что можно наблюдать при измерениях расхода газового конденсата или
попутного нефтяного газа, предпочтительна установка поточных плотномеров.
В качестве средств измерения используются рассмотренные ранее:
· вибрационные плотномеры и
· пикнометры.
Вибрационные плотномеры необходимы, непосредственно, для измерения газа
под давлением и плотности жидкости.
Измерение плотности газа с применением плотномеров любого типа
допускается в случае, если они не изменяют структуру потока.
Точку отбора пробы газа располагают в верхней части горизонтального
участка трубопровода при условии, что на данном участке:
• скорость потока больше нуля;
• отсутствуют завихрения.
Плотномеры располагают до сужающего устройства и после. Расстояние между
плотномером и сужающим устройством определяется согласно ГОСТ 8.586.5-2005.
Изменение плотности среды отслеживают, создавая поток через
чувствительный элемент плотномера путем ответвления части общего потока. Схемы
установки плотномеров приведены на рис. 6.33.
Значение плотности среды рассчитывают по формуле
 (6.20)
(6.20)
где ρ0
- показатель плотномера;
Рρ - давление газа в чувствительном элементе плотномера, Па;
ΔРρ - разность давления в месте отбора
давления перед сужающим устройством и на чувствительном элементе плотномера,
Па;
Тρ - температура газа в чувствительном
элементе плотномера, К;
ΔТρ - разность температуры в месте
отбора давления перед сужающим устройством и на чувствительном элементе
плотномера, К.
При определении плотности при рабочих условиях косвенным методом
используют значения параметров среды, необходимые для выполнения расчета.
Например, плотность газов при рабочих условиях может быть определена по их
плотности при стандартных условиях давления и температуры (для смесей газов
дополнительно - по компонентному составу, соответствующему ГОСТ 30319.0-96).
Допускается определять плотность при стандартных условиях пикнометрическим
методом в соответствии с ГОСТ 17310-2002 [57-58].
· Пикнометры. Используются для измерения истинной плотности. Для
определения плотности пробу газа из газопровода, аппарата или другой емкости
отбирают непосредственно в пикнометр способом сухой продувки. Допускается
отбирать пробы газа по ГОСТ 18917 в двухвентильные пробоотборники (контейнеры)
[59].
Пробу газа отбирают через штуцер на пробоотборной линии, снабженной
вентилем тонкой регулировки. Пробоотборная линия должна быть по возможности
короткой, изготовленной из стальных, медных или латунных трубок внутренним
диаметром 2-4мм. При отборе пробы температура газа в пробоотборной линии должна
быть не ниже температуры газа в газопроводе. При необходимости линию
теплоизолируют или подогревают. Пробу в пикнометр отбирают из пробоотборной
линии, соединяющей установку для заполнения пикнометра (рисунок) с газопроводом.
Перед отбором пробы пробоотборную линию продувают испытуемым газом через
тройник, соединяющий ее с установкой для заполнения пикнометра с помощью
резиновых или полиэтиленовых трубок. Давление в пробоотборной линии должно
превышать атмосферное примерно на 10 кПа. Пробы в контейнеры отбирают способом
сухой продувки под давлением, соответствующим давлению газа в месте отбора.
Контейнеры должны быть испытаны на давление, превышающее рабочее в 1,25 раза.
Перед отбором пробы газа в контейнер пробоотборную линию продувают газом в
течение 1-2мин для удаления остаточного газа (воздуха).
Пробоотборную линию присоединяют к входному вентилю контейнера,
установленного вертикально или горизонтально.
При закрытых вентилях контейнера открывают вентиль пробоотборной линии и
плавно открывают входной вентиль контейнера, чтобы контейнер заполнялся газом
постепенно. Когда давление газа в контейнере и точке отбора пробы выравняется,
плавно открывают выходной вентиль контейнера и продувают его газом так, чтобы
давление в нем поддерживалось на уровне полного давления газа в газопроводе. В
процессе отбора пробы через контейнер необходимо пропустить газ в объеме, в
10-15 раз превышающем вместимость контейнера. После окончания продувки
контейнера газом закрывают его выходной вентиль, затем - входной и вентиль на
пробоотборной линии. Контейнер отсоединяют от пробоотборной линии и проверяют
на герметичность погружением его в воду или обмыливанием.
Контейнер транспортируют в лабораторию, соблюдая правила безопасности.
Пробы хранят в отапливаемом помещении. Перед отбором пробы газа в пикнометр
контейнер выдерживают в помещении лаборатории не менее 2ч.
. Растворимость углеводородных газов в жидкости при неизменной
температуре определяют по формуле
 , (6.21)
, (6.21)
где S - объем газа, растворенного в единице объема жидкости, приведенной
к стандартным условиям; P - давление газа над жидкостью, α
- коэффициент
растворимости газа в жидкости, характеризующий объем газа (приведенный к
стандартным условиям), растворенный в единице объема жидкости при увеличении
давления на 1МПа; b - показатель,
характеризующий степень отклонения растворимости реального газа от идеального.
Значение α и b
зависят от состава газа и жидкости.
Коэффициент растворимости α для нефтей и газов основных
месторождений России изменяется в пределах 5 11 м3/м3 на
1МПа. Показатель b изменяется в
пределах 0,80,95.
На многих месторождениях природный газ первоначально существует в
растворенном состоянии в нефти и выделяется из раствора только при снижении
давления. Чем больше снижается давление, тем больше выделяется газа из
раствора.
. Температура измеряемой среды необходима для определения ее
плотности и вязкости, а также расчета диаметра отверстия сужающего устройства и
внутреннего диаметра измерительного трубопровода при рабочей температуре. Если
измеряемая среда - газ, то величина температуры используется и для расчета
показателя адиабаты.
В зависимости от определяемых параметров и методов их расчета может
возникнуть необходимость измерения температуры в единицах °С и/или К. При
измерении объема или массы веществ по средним параметрам потока за отчетный
период датчик температуры должен быть оснащен устройствами, позволяющими осуществлять
регистрацию результатов измерений и их интегрирование. Другими словами, для
измерения и регистрации температуры используют комплект, состоящий из
преобразователя температуры и термометра. Средства регистрации, интегрирования
и архивирования, применяемые для температуры, аналогичны указанным для средств
измерения давления.
Для расчета физических свойств среды необходима информация о температуре
потока в сечении трубопровода, предназначенного для отбора перепада давления на
сужающем устройстве. Выполнить измерение температуры в этом сечении
трубопровода практически невозможно, так как размещение в этом сечении
чувствительного элемента термометра привело бы к искажению распределения
скоростей потока, и следовательно к изменению коэффициента истечения.
В связи с отсутствием равенства температур по длине измерительного
трубопровода, удаление точки измерения температуры от сужающего устройства
неизбежно приводит к дополнительной погрешности измерений. Поэтому при выборе
точки измерения температуры следует учитывать необходимость исключения влияния
гильзы термометра на структуру потока перед расходомером и обеспечения малой
разности температур в сечении для отбора давления и сечении, выбранном для ее
измерения. Соблюдение этих требований возможно путем правильного выбора
расстояния от сужающего устройства до точки измерения температуры, которое
зависит в первую очередь от наружного диаметра гильзы термометра, условий
эксплуатации расходомера, теплоизоляции измерительных трубопроводов, режимов
течения и параметров измеряемого вещества. Выбор оптимального места размещения
гильзы термометра с учетом всех вышеперечисленных факторов является весьма
сложной задачей и требует специального анализа. Ниже приведены рекомендации,
которые гарантируют измерение температуры с приемлемой для практики
погрешностью.
Температуру среды измеряют до или после сужающего устройства на
прямолинейном участке измерительного трубопровода при помощи измерительного
преобразователя температуры или термометра, устанавливаемого на трубопроводе
радиально (рис. 6.35). При этом между сужающим устройством и гильзой термометра
должны отсутствовать местные сопротивления. Если температура измеряемой среды
менее 120 °С, то чувствительный элемент термометра погружают на глубину
(0,3-0,7)D.
Согласно ГОСТ 6651-94 [60]:
· длина наружной части термометра - расстояние от опорной плоскости
неподвижного штуцера или фланца до головки;
· длина погружаемой части термометра - расстояние от рабочего
конца защитной арматуры до мест возможной эксплуатации при температуре верхнего
предела измерения;
· диапазон измеряемых температур - интервал температур, в
котором выполняется регламентируемая функция термометра по измерению.
Наилучшим расположением преобразователя температуры и термометра (ПТ) или
его защитной гильзы (при ее наличии) при их установке является радиальное,
схема которого приведена на рис. 6.35, а. Допускается их наклонное
расположение, как приведено на рис. 6.35, б, 6.35, г, или установка за сужающим
устройством в колене, рис. 3.15, в. Указанное направление потока на рис. 6.35,
б, в является рекомендуемым.
Значения угла расширения α, обеспечивающие безотрывное течение
среды в диффузоре, представлены в табл. 3.6.
Таблица 3.6
Значения угла расширения α, обеспечивающие безотрывное течение
среды в диффузоре
|
(Dp/D) 2
|
1,5
|
2
|
2,5
|
3
|
3,5
|
4
|
|
α
|
28°
|
22°
|
16°
|
12°
|
9°
|
6°
|
Если среда - газ, то при наличии больших потерь давления (Δω>1,6·105 Па) на сужающем устройстве необходимо рассчитывать
температуру до сужающего устройства по измеренной температуре, а после
сужающего устройства по формуле
 , (6.22)
, (6.22)
где Т2 - измеренное значение температуры после сужающего
устройства, К,
Δω - потеря давления в сужающем
устройстве,
μЈΤ - коэффициент Джоуля-Томсона, К/Па.
Δω = (1−β 1,9 )ΔP , (6.23)
где ΔР - перепад давления на сужающем устройстве, Па,
β - относительный диаметр отверстия
сужающего устройства.
 или
или  , (6.24)
, (6.24)
где Н - энтальпия, Дж/моль,
М - молярная масса газа, кг/моль,
Р - давление среды, Па,
Ср - удельная теплоемкость при постоянном давлении, Дж/(кг·К),
Т - абсолютная (термодинамическая) температура среды, К,
R -
универсальная газовая постоянная, R = 8,31451, Дж /(моль·К),
Z -
фактор (коэффициент) сжимаемости, Z = 1.
. Вязкость нефтяного газа при давлении 0,1 МПа и температуре 0
обычно не превышает 0,01 мПа·с. С повышением давления и температуры она
незначительно увеличивается. Однако при давлениях выше 3 МПа увеличение
температуры вызывает понижение вязкости газа, причем газы, содержащие более
тяжелые углеводороды, как правило, имеют большую вязкость. Как и в случае с
определением физико-химических свойств нефти, вязкость газа можно определить с
помощью вискозиметров, либо рассчитать эмпирически.
. Теплоемкость газа - количество тепла, необходимое для нагревания
единицы веса или объема этого вещества на 1 . Весовая теплоемкость газа
измеряется в кДж/кг, а объемная - в кДж/м3.
. Теплота сгорания газа какого-либо вещества определяется
количеством тепла, выделяющимся при сжигании единицы веса или единицы объема
данного вещества. Теплота сгорания газов выражается в кДж/кг и кДж/м3и
является основным показателем, характеризующим газ или топливо.
Если при постоянной температуре повышать давление какого-либо газа, то
после достижения определенного значения давления этот газ сконденсируется, т.
е. перейдет в жидкость. Для каждого газа существует определенная предельная
температура, выше которой ни при каком давлении газ нельзя перевести в жидкое
состояние. Наибольшая температура, при которой газ не переходит в жидкое
состояние, как бы велико ни было давление, называется критической температурой.
. Давление, соответствующее критической температуре, называется
критическим давлением. Таким образом, критическое давление - это предельное
давление, при котором и менее которого газ не переходит в жидкое состояние, как
бы ни низка была температура. Так, например, критическое давление для метана
приблизительно равно 4,7 МПа, а критическая температура - 82,5.
Природные газы могут воспламеняться или взрываться, если они смешаны в
определенных соотношениях с воздухом и нагреты до температуры их воспламенения
при наличии открытого огня.
Минимальные и максимальные содержания газа в газовоздушных смесях, при
которых может произойти их воспламенение, называются верхним и нижним пределом
взрываемости. Для метана эти пределы составляют от 5 до 15 %. Эта смесь
называется гремучей и давление при взрыве достигает 0,8 МПа.
Абсолютное давление может быть измерено датчиками абсолютного давления
или рассчитано по результатам измерений барометрического (атмосферного) и
избыточного давлений. Другими словами, абсолютное давление среды - это сумма
избыточного и атмосферного давлений.
С целью расширения диапазона измеряемых расходов и снижения погрешности
измерений к одному сужающему устройству может быть подключено несколько
дифманометров (рис. 6.36).
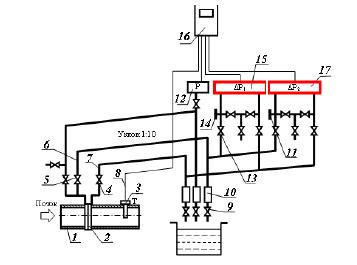
Рис. 6.36. Пример подключения двух дифманометров:
- измерительный трубопровод; 2 - диафрагма; 3 - датчик температуры; 4, 5
- отсечные вентили; 6,7 - соединительные линии; 8 - кабель для соединения датчика
температуры с вычислителем; 9 - дренажные вентили; 10 - конденсатосборники; 11
- заглушка; 12 - датчик давления; 13 - вентильный блок; 14 - штуцер со съемной
резьбой; 15 - основной дифманометр; 16 - вычислитель; 17 - дополнительный
дифманометр.
Диафрагмы с трехрадиусным и фланцевым способами отбора давления
представлены на рис. 6.37, 6.38. Ось отверстия должна быть расположена на
определенном расстоянии от соответствующего торца диафрагмы в зависимости от
способа отбора давления. При размещении отверстий необходимо учитывать толщину.
Для диафрагм с трехрадиусным способом отбора давления расположение
отверстий приведено на рис. 6.37. Расстояния l1 и l2
измеряют от входного торца диафрагмы. Значение l1 должно быть равным
(1 ± 0,1)D, значение l2 должно находиться в следующих пределах:
• (0,5 ± 0,02)D при β ≤ 0,6;
• (0,5 ± 0,01)D при β > 0,6.
Для диафрагм с фланцевым способом отбора давления расположение отверстий
приведено на рис. 6.38. Расстояние l1 измеряют от входного торца
диафрагмы, а расстояние  - от выходного торца диафрагмы. Значения l1 и могут находиться в следующих
пределах:
- от выходного торца диафрагмы. Значения l1 и могут находиться в следующих
пределах:
• (25,4 ± 0,5) мм при β > 0,6 и D< 0,15 м;
• (25,4 ± 1) мм в остальных случаях.
Осевая линия отверстия должна пересекаться с осевой линией измерительного
трубопровода под углом 90° ± 3°.
Диафрагмы с угловым способом отбора давления (рис. 6.39, 6.40).
Отверстия могут представлять собой либо отдельные отверстия, либо
кольцевые щели. Отдельные отверстия для отбора давления могут быть выполнены
как в трубопроводе, так и в его фланцах. Кольцевые щели выполняют в корпусе
камеры усреднения или во фланцах трубопровода, как приведено на рис. 6.39.
Способы отбора давления, используемые для сопел Вентури, приведены на
рис. 6.39. При использовании отдельного отверстия или нескольких взаимно соединенных
отверстий их оси могут быть расположены в любых осевых плоскостях
измерительного трубопровода, равномерно распределенных по периметру
измерительного трубопровода. Для защиты отверстий от загрязнения и попадания в
них жидких капелек или газовых пузырей, недопустимо расположение отверстий в
нижней и верхней частях измерительного трубопровода. Отверстие должно быть
круглым и цилиндрическим на глубине не менее 2,5 диаметров этого отверстия
(рис. 6.40).
Рис. 6.39. Способы отбора давления, используемые для сопел Вентури:
- с кольцевой щелью; 2 - с отдельным отверстием.
Диаметр a отдельных отверстий или ширины кольцевых щелей должен
удовлетворять следующим условиям:
• 0,005D ≤ a ≤ 0,03D при β ≤ 0,65;
• 0,01D ≤ a ≤ 0,02D при β > 0,65.
Если D < 0,1 м, то при любом значении β допускается диаметр a увеличивать до
2 мм. Независимо от значения β диаметр a должен удовлетворять
дополнительным условиям:
• 1 мм ≤ a ≤ 10 мм - для чистого газа;
• 4 мм ≤ a ≤ 10 мм - для сжиженного газа, в случае отдельных
отверстий для отбора давления.
Кольцевые щели выполняют прерывистыми или сплошными по всему периметру
корпуса камеры усреднения. Если отборы выполнены в виде прерывистой щели, то
каждую камеру усреднения соединяют с внутренней полостью трубопровода не менее
чем четырьмя отверстиями, оси которых находятся под равными углами друг к
другу, а площадь каждого отверстия - не менее 12 мм2.
Если используются отдельные отверстия, как приведено на рис. 6.40, то
осевые линии отверстий должны пересекаться с осью трубопровода под углом 90° с
допускаемым отклонением не более 3°.
Если используются несколько отдельных отверстий в каждой из двух групп
отверстий (до и после диафрагмы), то их оси должны образовывать между собой
равные углы.
При применении нескольких взаимно соединенных отверстий для отбора
статического давления до сужающего устройства, после сужающего устройства или в
горловине сужающего устройства их рекомендуется соединять по схеме (на примере
стандартной диафрагмы), представленной на рис. 6.41.
При измерении расхода газа давление среды рекомендуется измерять через
отдельное отверстие в измерительном трубопроводе или в камере усреднения
давления до сужающего устройства при ее наличии. Допускается применение одного
и того же отверстия для отбора статического давления с целью измерения перепада
давления на сужающем устройстве и измерения давления среды.

Рис. 6.40. Схема расположения угловых отверстий для отбора давления:
- камеры усреднения; 2 - отдельные отверстия; 3 - отверстия; 4 - корпус
камеры усреднения; 5 - диафрагма; f - глубина щели; bk, b/k -
внутренний диаметр корпуса камеры усреднения; c, c' - длина корпуса камеры
усреднения; a - ширина кольцевой щели или диаметр отдельного отверстия; s -
расстояние от уступа до камеры усреднения; g, h - размеры корпуса камеры
усреднения; j - диаметр отверстия в камере для передачи давления на систему
измерения.

Рис. 6.41. Схема соединения нескольких отверстий для отбора статического
давления: сечение А-А (до сужающего устройства) и сечение В-В (после сужающего
устройства)
Таблица 6.7
Достоинства и недостатки способов отбора проб давления газа
|
Способ отбора
|
Достоинства
|
Недостатки
|
|
Угловой
|
Удобство монтажа диафрагмы, а также возможность применения
кольцевых камер, обеспечивающих усреднение давления, что позволяет в
некоторых случаях снизить требование к эксцентриситету установки диафрагмы,
уменьшить влияние МС на показание расходомера.
|
Зависимость измеряемого перепада давления от диаметра
отверстий или ширины щели для отбора давления и большая, относительно других
способов отбора давления, вероятность загрязнения отверстий
|
|
Фланцевый и трехрадиусный
|
Меньшая степень засорения отверстий. Имеются данные,
указывающие на некоторое снижение влияния шероховатости стенок трубопровода
на коэффициент истечения диафрагм с фланцевым и трехрадиусным способами
отбора давления
|
Без применения дополни- тельных специальных кон- струкций
статическое дав- ление до и после диафрагмы измеряется без их осреднения по
периметру трубопровода. Кроме того, для трехрадиусного способа отбора
требуется сверление стенки трубопровода
|
Если для изготовления измерительного трубопровода использованы
прямошовные трубы и для отбора статического давления применяют одно отдельное
отверстие, то шов трубы на участке длиной не менее 0,5D, расположенном
непосредственно перед отверстием для отбора давления, не должен располагаться в
секторе поперечного сечения измерительного трубопровода с углом ± 30° от оси
данного отверстия. Если для отбора статического давления используют кольцевую
щель или несколько взаимно соединенных отверстий, то шов может быть расположен
в любом секторе.
При применении труб со спиральным сварным швом должна быть обеспечена
гладкая внутренняя поверхность измерительного трубопровода на длине 10D до
сужающего устройства (или на всем участке между сужающим устройством и
ближайшим до него местным сопротивлением, если длина этого участка не более
10D) и не менее 4D после сужающего устройства (после трубы Вентури - не менее
4d), путем ее механической обработки.
При выборе способа отбора давления на диафрагмах следует учитывать
следующие положения, рассмотренные в табл. 6.7.
Согласно ГОСТ 8.586.2-2005 и ГОСТ 8.586.3-2005 на территории России
распространены три способа отбора давления - трехрадиусный, фланцевый и угловой
[62-63].
. Влагосодержание и гидраты природных газов. Состав гидратов
природных газов. Гидратами углеводородных газов называются кристаллические
вещества, образованные ассоциированными молекулами углеводородов и воды; они
имеют различную кристаллическую структуру.
Свойство гидратов газов позволяет рассматривать их как твердые растворы.
Исследования показывают, что содержание водяного пара в газообразной фазе в
системе газ - гидрат меньше, чем в системе газ - вода.
Возникновение гидрата обусловлено определенными давлением и температурой
при насыщении газа парами воды. Гидраты распадаются после того, как упругость
паров воды будет ниже парциальной упругости паров исследуемого гидрата.
Углеводородные и некоторые другие газы, контактирующие с водой при
определенных давлении и температуре, также могут образовывать кристаллогидраты.
Кристаллогидраты природных газов внешне похожи на мокрый спрессованный снег,
переходящий в лед. Плотность гидратов несколько меньше плотности воды - 980
кг/м3. Образование их сопровождается выделением тепла, разложение -
поглощением. Существует мнение ученых-геологов, что значительные запасы
природного газа связаны с газогидратными залежами, расположенными в зонах вечномерзлотных
пород, и на дне океанов, где, как известно, температура составляет 2 ÷ 3 .
Для определения компонентного состава применяют хроматографы любого типа,
не изменяющие состав среды. Компонентный состав определяют в соответствии с
требованиями ГОСТ 10679-76 [63]. Для определения влажности газа применяют
влагомеры любого типа, измеряющие температуру конденсации паров влаги
(температуру точки росы), массовое и (или) объемное содержание водяных паров в
единице объема газа. Влажность природных газов рассчитывают в соответствии с
требованиями ГОСТ 20060-83 [64].
Глава 7. РЕЛЕЙНЫЕ ЭЛЕМЕНТЫ
В системах автоматики и телемеханики одним из наиболее распространенных
элементов является реле. Реле - это устройство, которое автоматически
осуществляет скачкообразное изменение (переключение) выходного сигнала под
воздействием управляющего сигнала, изменяющегося непрерывно в определенных
пределах.
Электрическое реле является промежуточным элементом, который приводит в
действие одну или несколько управляемых электрических цепей при воздействии на
реле определенных электрических сигналов управляющей цепи (рис. 7.1).
Рис. 7.1. Схема включения реле: X - контролируемая величина; Д - датчик;
Р - реле; ИУ - исполнительные устройства; К - контакт реле (слева) и внешний
вид электромагнитного реле.
Свойства реле характеризуются следующими основными параметрами:
) мощностью срабатывания Рср (Вт) - минимальной электрической
мощностью, которая должна быть подведена к реле от управляющей цепи для его
надежного срабатывания, т. е. приведения в действие управляемой цепи. Эта
мощность определяется общими электрическими и конструкционными параметрами
реле;
) мощностью управления Ру (Вт) - максимальной величиной электрической
мощности в управляемой цепи, при которой контакты реле еще работают надежно.
Мощность управления определяется параметрами контактов реле, переключающих
управляемую цепь. Выбор соответствующего типа реле производится на основании
значений Рср и Ру, так как эти параметры постоянны для
отдельных конструкций реле;
) допустимой разрываемой мощностью Рр (Вт) - мощностью,
разрываемой контактами при определенном токе или напряжении без образования
устойчивой электрической дуги при данном напряжении;
) коэффициентом управления - величиной, характеризующей отношение
управляемой мощности к мощности срабатывания реле: Ку=Ру/Рср≥1;
) временем срабатывания tср (с) - интервалом времени от
момента поступления сигнала из управляющей цепи до момента начала воздействия
реле на управляемую цепь. Допустимая величина tср определяется
необходимой быстротой передачи сигнала в управляемую цепь.
Существующие типы реле можно классифицировать по следующим основным
признакам:
по назначению:
· управления,
· защиты,
· сигнализации;
принципу действия:
· электромеханические;
· электромагнитные нейтральные,
· электромагнитные поляризованные,
· магнитоэлектрические,
· электродинамические,
· индукционные,
· электротермические,
· электронные,
· фотоэлектронные и др.
замеряемой величине:
· электрические (тока, напряжения, мощности, сопротивления, частоты,
коэффициента мощности),
· механические (силы, давления, скорости, перемещения, уровня,
объема и др.)
· тепловые (температуры, количества тепла),
· оптические (силы звука и др.),
· физических величин (времени, вязкости и др.).
мощности управления:
· маломощные с мощностью управления Ру≤1Вт,
· средней мощности с Ру = 1-10 Вт,
· мощные с Ру > 10 Вт.
времени срабатывания:
· безынерционные с tcp<0,001 с,
· быстродействующие tcp = 0,001-0,05 с,
· замедленные tcp =0,15-1 с,
· реле времени tcp >l с.
Наиболее распространенной группой являются электромеханические реле, в
которых изменение входной электрической величины вызывает механическое
перемещение подвижной части реле (якоря), приводящее к замыканию или размыканию
контактов реле.
Следует отметить, что к группе электромеханических относятся реле, в
основе действия которых лежат физические принципы аналогичных по названиям
электроизмерительных приборов. Разница состоит в том, что в электроизмерительных
приборах подвижная часть (стрелка) перемещается плавно и в больших пределах в
зависимости от величины тока или напряжения, а в реле якорь совершает небольшое
и обычно скачкообразное перемещение при определенных значениях входной величины
(тока или напряжения).
7.1 Электромагнитные реле постоянного и
переменного тока
Электромагнитные реле являются наиболее распространенными из группы
электромеханических реле и получили широкое применение в устройствах
автоматики, телемеханики и в вычислительной технике.
Электромагнитные реле по роду используемого тока делятся:
· на реле постоянного тока;
· реле переменного тока.
Реле постоянного тока подразделяются:
· на нейтральные;
· поляризованные.
7.1.1 Электромагнитные реле постоянного
(нейтральные)
Нейтральные реле одинаково реагируют на постоянный ток обоих направлений,
протекающий по его обмотке (т. е. положение якоря не зависит от направления
тока в обмотке реле).
Поляризованное реле реагирует на полярность сигнала.
По характеру движения якоря нейтральные электромагнитные реле
подразделяются на два типа:
· с угловым движением якоря;
· с втяжным якорем.
На рис. 7.2 изображены реле с угловым перемещением якоря (а) и с
втягивающим якорем (б).
При отсутствии управляющего сигнала якорь удален от сердечника на
максимальное расстояние за счет возвратной пружины. В этом случае одна пара
контактов замкнута (размыкающие контакты РК), а другая пара разомкнута
(замыкающие контакты ЗК),
Принцип действия реле, изображенного на рис. 7.2., основан на следующем:
при подаче тока в обмотку (катушку) создается магнитный поток, который, проходя
через сердечник, ярмо, якорь и воздушный зазор δН(0), создает магнитное усилие,
притягивающее якорь к сердечнику. При этом якорь, воздействуя на колодку,
перемещает ее таким образом, что контакты ЗК замыкаются, а РК размыкаются. В
некоторых конструкциях реле якорь при выключении тока под действием
собственного веса возвращается в исходное положение.
Таким образом, электромагнитное реле состоит из трех основных частей:
· контактной системы (контактные пружины выполнены из материала
нейзильбера);
· магнитопровода (ярмо, сердечник, якорь, выполненные из мягкой
стали);
· обмотки (катушки).
Магнитную цепь составляют сердечник, якорь, ярмо и воздушный зазор между
якорем и сердечником.
При детальном рассмотрении работы реле в процессе срабатывания и
отпускания наблюдаются четыре этапа.
Рис 7.2. Разновидности конструктивных схем реле:
- каркас с обмоткой; 2 - ярмо; 3 - выводы обмотки; 4 - колодка; 5 -
контактные пружины; 6 - замыкающий контакт ЗК; 7 - подвижный контакт; 8 -
размыкающий контакт РК; 9 - якорь; 10 - штифт отлипания; 11 - сердечник.
Этап 1 - срабатывание реле. Длительность этого этапа - время полного
срабатывания tcp, т, е. от момента подачи напряжения на катушку реле
до момента надежного замыкания контактов; Imр - величина тока, при котором начинается движение
якоря; tmp - время, за которое ток достигает
это значение, т. е, промежуток, соответствующий началу движения якоря; Iср
- ток, при котором срабатывает реле; tдв - время движения якоря при
срабатывании. Таким образом, время полного срабатывания, отвечающее окончанию
движения якоря.
 . (7.1)
. (7.1)
Этап 2 - работа реле (tраб - время работы реле). После того,
как реле сработает, ток в обмотке продолжит увеличиваться, пока не достигнет
установившегося значения. Впоследствии величина тока в обмотке реле остается
неизменной. Отношение установившегося тока Iуст к величине тока
срабатывания Iср называется коэффициентом запаса реле по
срабатыванию Кзап (т. е. Кзап показывает надежность
работы реле).
 . (7.2)
. (7.2)
Этап 3 - отпускание реле. Этот период начинается от момента прекращения
подачи сигнала до момента, когда ток в обмотке реле уменьшится до значения Iоm. Отношение тока отпускания к току
срабатывания называется коэффициентом возврата.
 . (7.3)
. (7.3)
Обычно Кв=0,4-0,8.
Этап 4 - покой реле. Это отрезок времени от момента размыкания контактов
реле до момента поступления нового сигнала на обмотку реле. При быстром
следовании управляющего сигнала друг за другом работа реле характеризуется
максимальной частотой срабатывания (количество срабатываний реле в единицу
времени).
7.1.2 Электромагнитные реле постоянного тока
(поляризованные)
В отличие от рассмотренных ранее нейтральных электромагнитных реле, у
поляризованного реле направление электромагнитного усилия зависит от полярности
сигнала постоянного тока в обмотке. Поляризация таких реле осуществляется при
помощи постоянного магнита.
Существует много конструктивных разновидностей поляризованных реле,
которые классифицируются по ряду признаков. По конструктивной схеме магнитной
цепи различают реле с последовательной, параллельной (дифференциальной) и
мостовой магнитными цепями, по числу обмоток управления - одно- и
многообмоточные, по способу настройки контактов (по числу устойчивых положений
якоря) различают двух- и трехпозиционные.
Поляризованные реле получили большое распространение в маломощной
автоматике, особенно в следящих системах при управлении реверсивными
двигателями.
К числу достоинств поляризованных реле относятся:
· высокая чувствительность, которая характеризуется мощностью
срабатывания и составляет 10-5 Вт;
· большой коэффициент управления;
· малое время срабатывания (единицы миллисекунд).
К недостаткам по сравнению с нейтральными электромагнитными реле
относятся:
· сложность конструкции;
· большие габариты, вес и стоимость.
В поляризованных реле, как было отмечено, используют дифференциальные и
мостовые схемы магнитных цепей, которые имеют много разновидностей (название
цепей связано с типом электрической схемы замещения электромагнитной системы).
На рис. 7.3, а изображено поляризованное реле с дифференциальной схемой
магнитной цепи.
На якорь реле действуют два не зависимых друг от друга потока: поток Фо(п)
постоянного магнита, не зависящий от рабочего состояния схемы, в которую
включено реле, и рабочий (управляющий) поток Фэ(р), определяемый
намагничивающей силой катушки, т. е. величиной протекающего по обмотке тока.
Электромагнитное усилие, действующее на якорь, определяется, таким образом, в
зависимости от суммарного действия обоих потоков - Фэ(р) и Фо(п).
Изменение направления электромагнитного усилия при изменении полярности тока в
рабочей обмотке происходит вследствие того, что изменяется направление рабочего
потока относительно поляризующего Фо(п).
Рис. 7.3. Поляризованное реле (а) и способы настройки контактов (б, в) :
1, 1’ - намагничивающие катушки; 2 - ярмо; 3 - постоянный магнит; 4 - якорь; 5,
5’ - контакты
Поляризующий поток Фо(п) проходит по якорю и разветвляется на
две части - Ф01 и Ф02 - в соответствии с проводимостями
воздушных зазоров слева и справа от якоря (δл и δпр). В зависимости от полярности
управляющего сигнала рабочий поток Фэ(р) вычитается из потока Ф01
в зазоре слева от якоря и прибавляется к потоку Ф02 справа от якоря
(как показано на рис. 7.3, а), или наоборот.
В данном случае якорь перекинется из левого положения в правое. При
выключении сигнала якорь будет находиться в том положении, которое он занимал
до выключения сигнала. Таким образом, результирующее электромагнитное усилие,
действующее на якорь, будет направлено в сторону того зазора, где магнитные
потоки суммируются.
Если теперь в обмотке 1 и 1' (см. рис. 7.3, а) подать управляющий сигнал
Iср такой величины, чтобы Фэ=∆Ф ( ), то при незначительном возрастании
тока якорь перебросится в правое положение, так как, очевидно, правое усилие
будет больше левого.
), то при незначительном возрастании
тока якорь перебросится в правое положение, так как, очевидно, правое усилие
будет больше левого.
Магнитные потоки до момента переброски якоря будут соответственно равны:
 и
и  . (7.4)
. (7.4)
После переброски якоря в правое положение знаки ∆Ф в указанных
выражениях изменятся: если Фэ=∆Ф, то получим выражения для
потоков при правом положении якоря:
 и
и  . (7.5)
. (7.5)
После перехода якоря за нейтральную линию перераспределяющийся поток Ф0(п)
создает дополнительное усилие, необходимое для перемещения якоря. Этим и
объясняется, что поляризованные реле имеют незначительное время срабатывания, не
превышающее нескольких миллисекунд. Кроме того, дополнительное усилие, сжимая
контакты, позволяет при очень малой величине управляющего сигнала управлять
относительно мощными электрическими цепями, т. е. коэффициент управления имеет
значительную величину (до 5000), чего не достигает ни одно нейтральное реле.
Обычно отклонение якоря от нейтрали составляет 0,05-0,1 мм.
В поляризованном реле с мостовой схемой магнитной цепи (рис. 7.4) силы
притяжения якоря, включенного в одну из диагоналей мостовой схемы, действуют
так же, как и в дифференциальной схеме, т. е. в воздушном зазоре с одной
стороны якоря рабочий поток Фэ(р) направлен согласно с поляризующим
потоком Ф0(п), а с другой - встречно. Мостовые схемы поляризованных
реле имеют более высокую стабильность параметров и устойчивость к внешним
механическим воздействиям.
Рис. 7.4. Поляризованное реле с мостовой схемой магнитной цепи.
Поляризованные реле выпускаются трех видов настройки. Реле, изображенное
на рис. 7.3, а, является двухпозиционным. Если неподвижные контакты 5 и 5'
симметрично расположены относительно нейтральной линии (якорь отрегулирован
симметрично), то при выключении управляющего сигнала якорь реле остается в том
же положении, которое он занимал при наличии управляющего сигнала. Повторное
включение управляющего сигнала прежней полярности не вызовет изменения
положения якоря. Если изменить полярность управляющего сигнала, то якорь
перебросится в другое положение, например в положение 5', и останется в нем после
снятия сигнала. Такая настройка называется нейтральной или двухпозиционной.
Если один из контактных винтов, 5 или 5', выдвинут за нейтральную линию
(рис. 7.3, б), то реле является двухпозиционным с преобладанием к одному из
контактов. При выключенном реле якорь всегда прижат к левому контакту 5 (или к
правому контакту 5', если за нейтральную линию выдвинут левый контакт) и
перебрасывается вправо лишь на время протекания в управляющей обмотке тока
соответствующей полярности.
Трехпозиционное реле имеет симметрично расположенные от нейтральной линии
неподвижные контакты (рис. 7.3, в). Якорь при отсутствии управляющего сигнала
удерживается в среднем положении с помощью специальных пружин (с двух сторон)
или закрепляется на плоской пружине, упругость которой, создает устойчивое
положение равновесия в среднем положении. При подаче сигнала в управляющую
обмотку контакт на якоре замыкается с левым или правым контактом (в зависимости
от полярности сигнала) и возвращается в нейтральное положение после снятия
сигнала.
Поляризованные реле находят широкое применение в схемах автоматики
благодаря своим характерным особенностям. Наличие нескольких обмоток позволяет
использовать их в качестве логических элементов, небольшая мощность
срабатывания - в качестве элементов контроля небольших электрических сигналов,
малое время срабатывания и чувствительность к полярности входных сигналов - в
качестве амплитудных модуляторов и демодуляторов. Благодаря высокой
чувствительности поляризованные реле часто используют в маломощных цепях
переменного тока с включением через выпрямитель.
7.1.2 Электромагнитные реле переменного тока
В тех случаях, когда основным источником энергии является сеть
переменного тока, желательно применять реле, обмотки которых питаются
переменным током. При подаче в обмотку реле переменного тока якорь будет
притягиваться к сердечнику так же, как и при постоянном токе. При одинаковых
конструктивных размерах реле и равных значениях максимальной индукции среднее
значение электромагнитного усилия у реле переменного тока вдвое меньше, чем у
реле постоянного тока.
Электромагнитное усилие меняется (пульсирует) с удвоенной частотой 2ω,
обращаясь в нуль дважды
за период питающего напряжения. Следовательно, якорь реле может вибрировать,
периодически оттягиваться от сердечника возвратной пружиной, что вызывает
дрожание якоря и, как следствие, износ оси якоря.
Реле переменного тока имеют худшие параметры, чем реле постоянного тока,
так как при одинаковых размерах имеют меньшее электромагнитное усилие и менее
чувствительны. Кроме того, они сложнее и дороже, поскольку необходимо иметь
шихтованный магнитопровод (набранный из отдельных листов, а также применять
специальные меры для устранения вибрации якоря - явление, которое нежелательно,
так как может привести к обгоранию контактов, прерыванию электрической цепи и
др. поэтому для ослабления вибрации принимают специальные конструктивные меры.
Рассмотрим три способа устранения вибрации якоря реле переменного тока.
. Применение утяжеленного якоря. Утяжеленный якорь благодаря большой инерции
не может вибрировать с удвоенной частотой (2ω), т. е. он не успевает отходить от
сердечника в те моменты времени, когда ток в обмотке реле переходит через нуль.
Вибрация якоря в этом случае уменьшается. Однако применение утяжеленного якоря
вызывает увеличение его размеров, что приводит к уменьшению чувствительности
реле. Кроме того, габариты, вес и стоимость реле увеличивается. Этот способ
находит применение в том случае, если исполнительный механизм, связанный с
якорем реле, обладает большой инерцией.
. Применение двухфазного реле. Двухфазное реле переменного тока (рис.
7.5) имеет две обмотки, расположенные на двух сердечниках ЭМ1 и ЭМ2, имеющих
общий якорь. Обмотки реле соединены параллельно относительно друг друга. В цепь
одной из обмоток включен конденсатор С, благодаря чему токи в обмотках реле
оказываются сдвинутыми по фазе на угол π/2. Так как токи в обмотках проходят
через нуль в разные моменты времени, то результирующее тяговое усилие,
действующее на якорь, никогда не обращается в нуль и имеет постоянное значение,
т. е. не содержит переменной составляющей (при сдвиге токов в обмотках двух
электромагнитов на угол π/2).
3. Применение короткозамкнутого витка (экрана). Короткозамкнутый виток,
охватывающий часть конца сердечника (расщепленный сердечник), является более
эффективным способом.
На рис. 7.6 изображена схема реле переменного тока с короткозамкнутым
витком. Конец сердечника, обращенный к якорю, расщеплен (пропилен) на две
части, на одну из которых надета короткозамкнутая обмотка - экран Э (один или
несколько витков).
Рис. 7.6. Реле переменного тока с короткозамкнутым витком

Рис. 7.7. Обозначение реле на схемах: 1 - обмотка реле (A1, A2 -
управляющая цепь), 2 - контакт замыкающий, 3 - контакт размыкающий, 4 - контакт
замыкающий с замедлителем при срабатывании, 5 - контакт замыкающий с
замедлителем при возврате, 6 - контакт импульсный замыкающий, 7 - контакт
замыкающий без самовозврата, 8 - контакт размыкающий без самовозврата, 9 -
контакт размыкающий с замедлителем при срабатывании, 10 - контакт размыкающий с
замедлителем при возврате, 11 - общий контакт, 11-12 - нормально замкнутые
контакты, 11-14 - нормально разомкнутые контакты.
Магнитопровод выполнен из отдельных листов для уменьшения потерь.
Принцип работы реле заключается в следующем. Переменный магнитный поток Фосн
основной обмотки ωосн, проходя через разрезанную часть
сердечника, делится на две части. Часть потока Ф2 проходит через
экранированную половину полюса сечением Sδ2, в которой размещается
короткозамкнутая обмотка, а другая часть потока Ф1 проходит через
неэкранированную половину полюса сечением Sδ1. Поток Ф2 наводит в
короткозамкнутом витке эдс (екз), которая создает ток iкз.
При этом возникает еще один магнитный поток Фкз, который
воздействует на магнитный поток Ф2 и вызывает отставание этого
потока по фазе относительно потока Ф1 на угол φ=60-80
градусов. Благодаря
этому результирующее тяговое усилие Fэ никогда не доходит до нуля,
так как оба потока проходят через нуль в разные моменты времени.
7.2 Магнитоуправляемые контакты (герконы)
Геркон - это сокращение от «герметичный контакт» - такое коммутационное
устройство, которое замыкает контакты при воздействии магнитного поля.
Переключение геркона из между состоянием «включен» и «выключен» происходит под
действием магнитного поля постоянного магнита или электромагнита, поэтому
герконы еще называют магнитоуправляемыми контактами.
Геркон представляет собой герметичную стеклянную колбу или трубку, внутри
которой находятся упругие металлические контакты. По длине они перекрывают друг
друга, но между ними есть небольшой зазор. Контакты геркона сделаны из упругого
ферримагнитного сплава, имеют плоскую форму. В разомкнутом состоянии контакты
не соприкасаются, но при появлении магнитного поля достаточной силы контакты
геркона намагничиваются и притягиваются друг к другу, происходит замыкание.
Если магнитное поле исчезает, то контакты размагничиваются и размыкаются под
действием силы упругости, переходят в исходное состояние. Полость геркона
заполнена инертным газом, либо в ней вакуум: это препятствует появлению нагара
на контактах, если в момент замыкания между ними пробегает искра. Концы
контактов, которые непосредственно соприкасаются при замыкании, покрыты
благородным металлом, который уменьшает переходное сопротивление и
предотвращает коррозию. Так продлевается срок службы геркона.
Разновидности герконов.
По устройству работы герконы разделяют на три группы:
· Герконы, работающие на замыкание (рис.7.8).
В нормальном состоянии (без воздействия магнитного поля) такие герконы
находятся в разомкнутом состоянии, а под действием магнитного поля они
замыкаются.
· Герконы, работающие на размыкание.
Герконы, работающие на размыкание
Без магнитного поля контакты геркона замкнуты, а при намагничивании
отталкиваются друг от друга и размыкаются.
· Герконы, работающие на переключение.
В таком герконе не два, а три контакта: два остаются неподвижными, а
третий переключается между двумя другими. Без магнитного поля замыкается одна
цепь, а при воздействии магнита происходит переключение на другой контакт.
Нормально замкнутый контакт (тот на который переключается геркон без магнитного
поля) выполняется из немагнитного материала, а два других - из магнитного.
Самыми распространёнными являются герконы, работающие на замыкание.
Магнитоуправляемые герметичные контакты можно использовать во влажных и
запылённых условиях, они быстро срабатывают и надёжно работают при самых разных
температурах.
Преимущества.
· Практически отсутствие дребезга контактов. Контакты геркона находятся в
вакууме или в инертном газе и слабо обгорают, даже если при замыкании или
размыкании между контактами возникает искра.
· Долговечность герконов. Считается, что если не бить геркон и
не пропускать очень большие токи, то срок службы геркона бесконечен, (хотя в
технических данных на герконы указаны ограничения, 103-108
и больше срабатываний).
· Меньший размер по сравнению с классическим реле, рассчитанным
на такой же ток.
· Отсутствие необходимости применения тугоплавких и драгоценных
металлов для контактов.
· Герконы почти бесшумны.
· Высокое (относительно классических реле) быстродействие.
· Удобство применения.
Недостатки:
· Больший вес по сравнению с открытыми контактами.
· Необходимость создания магнитного поля.
· Восприимчивость к внешним магнитным полям, необходимость
защиты от них.
· Сложность монтажа.
· Хрупкость - герконы нельзя использовать в условиях сильных
вибраций и ударных нагрузок.
· Ограниченная скорость срабатывания.
· Возможность самопроизвольного размыкания контактов геркона
при больших токах.
· Иногда контакты «залипают» (остаются в замкнутом состоянии) -
такой геркон подлежит замене.
Применение герконов
Герконы широко применяются в различных датчиках, цель которых фиксировать
какое-то положение предметов: открывание и закрывание дверей, крышки ноутбука и
т.п. В частности герконы используются в поплавковых датчиках уровня жидкости в
резервуарах [65].
Глава 8. ПЕРЕДАЧА ИНФОРМАЦИИ В СИСТЕМАХ
АВТОМАТИЗАЦИИ
8.1 Основные сведения о
системах телемеханики
Телемеханика - область науки и техники, предметом которой является
разработка методов и технических средств передачи и приема информации
(сигналов) с целью управления и контроля на расстоянии.
Специфическими особенностями телемеханики являются:
) удаленность объектов контроля и управления;
) необходимость высокой точности передачи измеряемых величин;
) недопустимость большого запаздывания сигналов;
) высокая надежность передачи команд управления;
) высокая степень автоматизации процессов сбора информации.
Телемеханизация применяется тогда, когда необходимо объединить разобщенные или
территориально рассредоточенные объекты управления в единый производственный
комплекс (например, при управлении газо- и нефтепроводом) либо когда
присутствие человека на объекте управления нежелательно (например, в атомной
промышленности, на химических предприятиях) или невозможно (например, при
управлении непилотируемой ракетой).
Особое значение телемеханика приобретает в связи с созданием автоматизированных
систем управления (АСУ). Обработка данных, полученных по каналам телемеханики,
на ЭВМ позволяет значительно улучшить контроль за технологическим процессом и
упростить управление.
Поэтому в настоящее время понятия «телемеханика» и АСУ ТП становятся
синонимами. Разница между этими понятиями заключается не столько в технической
сути, сколько в традициях использования в определенной области промышленности.
Например, в трубопроводном транспорте предпочитают использовать слово
«телемеханика», на промышленных предприятиях - АСУ ТП.
В англоязычных источниках аналогом понятия «телемеханика» является
сокращение SCADA - Supervisory Control And Data Acquisition -диспетчерское
управление и сбор данных, в которое вкладывается, по сути, тот же смысл.
Пример построения двухуровневой телемеханической системы, ставшей
классической схемой, показан на рис. 8.1.
Контроль и управление системой осуществляют с пункта управления (ПУ), где
находятся диспетчер, аппаратура телемеханики, ЭВМ, мнемонический щит. Объекты
контроля и управления находятся на одном или нескольких контролируемых пунктах
(КП).
Базовыми функциями системы телемеханики являются телеуправление (ТУ),
телеизмерение (ТИ), телесигнализация (ТС) и телерегулирование (TP).
Телеуправление обеспечивает дистанционное управление объектом контроля.
ТУ представляет собой воздействие на исполнительные органы контролируемых
пунктов, имеющие дискретное состояние, путем подачи также дискретных команд.
Команды ТУ обычно двухпозиционные: включить - отключить.
Телесигнализация используется для дистанционного контроля дискретных
изменений состояния объекта, например, включен/выключен, открыт/закрыт,
норма/авария и т.п. Для получения данных объект оснащают датчиками состояния. В
простейшем случае применяют двухпозиционные контактные переключатели, но могут
использоваться и многопозиционные переключатели.
Телеизмерение используется для получения количественных значений
непрерывных параметров контролируемого процесса, например температуры, давления
и т. п. Для измерения на объекте используют преобразователи, которые
преобразуют эти параметры в нормированные электрические сигналы. Контроллер КП
измеряет значения этих сигналов и по запросам ПУ или периодически передает их
на ПУ в цифровом виде.
Телерегулирование обеспечивает дистанционное задание уровня воздействия
на объект управления. Оно представляет собой телеуправление объектами с
непрерывным множеством состояний. Для реализации телерегулирования используются
функции ТИ-ТУ или ТС-ТУ. Управление начинается с задания оператором величины
воздействия, а затем выдачей команды с ЭВМ.
Пункт управления - это место размещения диспетчерского персонала,
аппаратуры для приема и обработки информации от контролируемых пунктов. Часто
под термином ПУ подразумевают контроллеры, непосредственно выполняющие прием и
первичную обработку данных от КП. В задачи ПУ входят:
) прием данных с КП по каналам связи;
) организация опроса КП при подключении нескольких КП на один канал
связи;
) передача на КП команд управления;
) передача данных и прием команд ЭВМ;
) переадресация, передача данных на верхний уровень и прием команд с
верхнего уровня в многоуровневых системах.
Контролируемый пункт - это место размещения объектов контроля и
управления, а также аппаратура, выполняющая функции контроля и управления, обычно
называемая контроллером КП. Часто под термином КП подразумевают один
контроллер, установленный на контролируемом объекте.
На крупных объектах (таких как нефтеперекачивающие или компрессорные
станции) могут находиться несколько контроллеров КП.
Взаимодействие между ПУ и КП происходит по каналу связи.
Каналом связи называется совокупность технических средств и тракта для
передачи сообщений на расстояние независимо от других каналов. Он образуется в
линии связи - проводной, радиолинии и др.
Линия связи - это физическая среда или тракт, по которым происходит
передача сигналов между КП и ПУ, например проводная или кабельная линия,
оптоволокно, выделенный телефонный канал, радиоканал и т. п.
Способ кодирования данных и порядок обмена посылками обычно называют
протоколом обмена.
Мнемонический щит представляет собой табло с пассивной схемой
контролируемого объекта и активными элементами, отображающими текущее состояние
объекта.
Автоматизированное рабочее место (АРМ) - это рабочее место специалиста в
какой-либо предметной области, оборудованное компьютером и специальным
программным обеспечением, помогающее решать задачи в рамках деятельности этого
специалиста (например, АРМ диспетчера, АРМ технолога и т.п.). АРМ может быть
оснащено дополнительным нестандартным оборудованием
В современных системах телемеханики большое внимание уделяется их
программному обеспечению и интеграции с действующими системами и программными
комплексами. В программном обеспечении наблюдается тенденция к стандартизации
программных интерфейсов систем сбора данных и обрабатывающих программ,
обеспечению возможности экспорта собранных данных в специализированные
программы (расчета режимов, планирования, аналитические, АРМ специалистов).
С технической стороны в системах все чаще используются современные
скоростные каналы связи (оптоволокно, Ethernet) и беспроводные технологии
(например, транкинговая и сотовая связь). К традиционным функциям телемеханики
(телесигнализация, телеизмерение, телеуправление) добавляются функции
различного учета, транспорта данных с локальных автоматических приборов.
При управлении производственным процессом происходит постоянный обмен
различными сообщениями о событиях, происходящих в той или иной точке процесса.
Эти сообщения несут информацию о его состояниях или предназначены для
изменения этих состояний - например, сообщение об изменении давления в
трубопроводе или команда на закрытие задвижки.
Для получателя сообщения, как правило, интерес представляет только его
новая часть - информация, т. е. содержательные сведения (данные), ранее ему
неизвестные. Сообщения передаются с помощью сигналов.
Сигналом называется носитель (переносчик) сообщения.
Процесс передачи сообщений условно показан в виде схемы, показанной на
рис. 8.2. Сообщение от источника поступает в передающее устройство, которое
преобразует его в сигнал, передаваемый по каналу связи. Процесс автоматического
преобразования в сигнал, происходящий в передающем устройстве, включает в себя
одну или несколько из следующих операций: преобразование из одной физической формы
в другую, квантование, модуляцию, кодирование. Канал связи начинается на входе
передающего устройства и кончается на выходе приемного устройства. В процессе
передачи на сигнал накладываются различные помехи. Приемное устройство
отфильтровывает их и восстанавливает по полученному сигналу сообщение для
получателя.
В зависимости от характера изменения во времени сообщения делятся на
четыре группы:
) непрерывные;
) дискретные по времени;
) дискретные по множеству;
) дискретные по времени и по множеству.
Процесс наложения сообщения на переносчик информации называется
модуляцией. Основной смысл модуляции - передача низкочастотного сообщения
высокочастотным сигналом.
Преимущества: значительное уменьшение мощности передатчика и затухания
сигнала; возможность одновременной передачи по одной линии связи разных
сообщений; повышение достоверности передаваемых сообщений вследствие лучшей
помехозащищенности модулированных сигналов.
В зависимости от того, какой параметр переносчика меняется, модуляция
может быть непрерывной (амплитудной, частотной, фазовой) или импульсной
(широтно-импульсной и т. д.). А параметры сигнала, используемые для передачи,
называются импульсными признаками.
К ним относятся:
) полярность - этот признак является наиболее помехозащищенным, но позволяет
формировать только два различных состояния;
) амплитуда импульса - с помощью этого признака можно сформировать любое
число состояний, но амплитуда сигнала наиболее подвержена действию помех; кроме
того, если амплитуды соседних сигналов отличаются незначительно, их трудно
различать на приемной стороне;
) длительность импульса;
) частота импульсов;
) фаза импульса - с помощью этого признака обычно тоже формируется только
два состояния, одному из которых соответствует посылка импульса, синфазного
опорному сигналу, а другому сообщению - импульса, находящегося в противофазе с
опорным сигналом.
Кодирование, - это преобразование по определенному правилу дискретного
сообщения в дискретный сигнал в виде кодовых комбинаций. Обратный процесс
(декодирование) должен однозначно восстановить передаваемое сообщение. Целью
кодирования является эффективное использование каналов связи и увеличение
достоверности передачи информации.
Код - система условных знаков, символов для передачи, обработки и
хранения различной информации.
Конечная последовательность кодовых знаков называется кодовым словом.
Число различных символов, которые используются в словах кода, называется
основанием данного кода, а сами символы составляют так называемый кодовый
алфавит.
Число элементов кода в кодовом слове определяет его длину, или
разрядность, п.
В качестве примера представлена запись чисел от 0 до 9 четырехразрядным
двоичным кодом.

Двоично-десятичный код позволяет записать каждый разряд десятичного числа
в виде четырехразрядного двоичного кода, т. е. в двоичной системе счисления
представляется отдельно каждая цифра. Например, число 8 247 запишется в виде
1000 0010 0100 0111 (8->1000, 2->0010, 4->0100, 7->0111).
Коды, позволяющие обнаружить ошибку, называются обнаруживающими. Коды,
позволяющие обнаружить и исправить ошибки, называются корректирующими.
В цифровых устройствах носителем информации является цифровой двоичный
код. Этот код состоит из множества двоичных разрядов, каждый из которых
принимает только два фиксированных значения - «0» или «1». Двум двоичным цифрам
соответствуют два состояния электронной схемы.
Основанием системы служит число два, а коэффициентами могут быть только
две цифры - ноль (0) и единица (1), которые называют битами (двоичными цифрами).
В любой системе кодирования должно выполняться неравенство
< Sn, (8.1.)
где N - количество кодируемых объектов;- основание кода (основание
системы счисления);- длина кода (количество разрядов в кодовом слове).
Например, для записи числа 14 в двоичной системе счисления необходим
четырехразрядный код: 24 = 16, 14 < 16.
Для хранения и обработки информации в виде текстов, формул и чисел
необходимо с помощью бит закодировать около 150 различных символов (заглавные и
строчные буквы латинского и русского алфавитов, знаки препинания,
математические знаки, десять цифр и т.п.), т.е. N~ 150.
Для этого необходимы 8-разрядные коды (28 = 256).
Восьмиразрядный код называют байтом. Емкость памяти ЭВМ оценивают в
килобайтах (кбайт), мегабайтах (Мбайт) и гигабайтах (Гбайт).
Все цифровые устройства основаны на принципе многократного повторения
относительно простых базовых логических схем. Связи между этими схемами
строятся на основе чисто формальных методов.
Инструментом такого построения служит булева алгебра, названная по имени
одного из ее разработчиков - английского математика Дж. Буля. Применительно к
цифровой технике она называется также алгеброй логики. Логическая переменная
имеет только два значения, которые обычно называются логическим нулем и
логической единицей и обозначаются «0» и «1» или просто 0 и 1.
Существует три основные операции между логическими переменными:
· конъюнкция (логическое И);
· дизъюнкция (логическое ИЛИ);
· инверсия (логическое НЕ).
Конъюнкция называется также логическим умножением,
 . (8.2)
. (8.2)
дизъюнкция - логическим сложением
 , (8.3)
, (8.3)
инверсия - отрицанием

 (8.4)
(8.4)
где F - логическая (булева) функция;
А и В - логические переменные.
Значения этих логических функций для всех возможных значений двух
переменных называются таблицей истинности.
Таблица 8.1.
Таблицы истинности логических операций
|
A
|
B
|
Отрицание Инверсия (НЕ) 
|
Конъюнкция Логическое умножение (И, «&»)
|
Дизъюнкция Логическое сложение (ИЛИ, «1»)
|
Следование Импликация А
|
Тождество А В В
|
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
|
0
|
1
|
1
|
0
|
1
|
1
|
0
|
|
1
|
0
|
0
|
0
|
1
|
0
|
0
|
|
1
|
1
|
0
|
1
|
1
|
1
|
1
|
Операции над логическими переменными выполняются по определенным
правилам. Прежде всего, необходимо учитывать принцип двойственности (теорема де
Моргана), который в общем виде записывается так:

 (8.5)
(8.5)
Для преобразования формул алгебры логики с целью их минимизации, как и в
обычной алгебре, используются скобки, а если их нет, то сначала выполняется
отрицание (инверсия) над отдельными переменными, затем логическое умножение
(конъюнкция) и наконец, логическое сложение (дизъюнкция). Если черта (знак
инверсии) стоит над совокупностью букв и знаков, то она выполняется в последнюю
очередь. Используются также теоремы алгебры логики.
Операции над логическими переменными выполняются по определенным
правилам. Прежде всего, необходимо учитывать принцип двойственности (теорема де
Моргана), который в общем виде записывается так:
Для преобразования формул алгебры логики с целью их минимизации, как и в
обычной алгебре, используются скобки, а если их нет, то сначала выполняется
отрицание (инверсия) над отдельными переменными, затем логическое умножение
(конъюнкция) и наконец, логическое сложение (дизъюнкция). Если черта (знак
инверсии) стоит над совокупностью букв и знаков, то она выполняется в последнюю
очередь. Используются также теоремы алгебры логики.
Логические переменные могут иметь только два дискретных значения, поэтому
они реализуются с помощью схем, которые могут находиться в двух легко
различимых состояниях.
Такими схемами являются электрические переключающие схемы, выполняемые на
основе транзисторных ключей.
Для представления логических переменных в цифровых элементах используется
электрическое напряжение, имеющее два различных уровня: высокий, близкий по
уровню к напряжению питания (транзистор закрыт), и низкий, близкий к потенциалу
корпуса (транзистор открыт).
Этим уровням можно поставить в соответствие состояния логических «1» и
«0». Если высокий уровень напряжения соответствует логической «1», а низкий -
логическому «0», логика называется позитивной, а если наоборот (высокий - «0»,
низкий - «1») - негативной логикой.
Для реализации трех основных операций алгебры логики в схемах цифровых
устройств используются основные логические элементы, входные переменные которых
часто обозначают через х а выходные - через у:
) элемент И (&)- схема логического умножения, конъюнктор;
) элемент ИЛИ (1)- схема логического сложения, дизъюнктор;
) элемент НЕ ( - схема логического отрицания, инвертор.
- схема логического отрицания, инвертор.
Этот набор элементов называют основным базисом или основной функционально
полной системой элементов.
Помимо этих элементов часто применяются логические схемы, выполняющие
операции И-НЕ и ИЛИ-НЕ, каждая из них является функционально полной.
Информация, поступающая в цифровое устройство, представляет дискретный
(т.е. состоящий из нулей и единиц) сигнал (код). На передачу сигнала отводится
конечный отрезок времени, называемый тактом работы устройства. Если за один
такт в устройство передается один из разрядов двоичного числа, то устройство
работает с последовательным кодом, если же за один такт передается все двоичное
число одновременно, то устройство работает с параллельным кодом.
В общем случае на вход цифрового устройства поступает множество двоичных
переменных X (х1, х2, ..., хn), а с выхода снимается множество двоичных переменных Y(у1, у2, ..., уn). При этом устройство реализует
определенную связь (логическую функцию) между входными и выходными переменными.
В зависимости от вида этой связи цифровые устройства делят на:
· комбинационные и
· последовательностные.
В комбинационных устройствах значения Y в течение каждого такта
определяются значениями X только в этот же такт. Такие устройства состоят
только из логических элементов.
В последовательностных устройствах значения Y определяются значениями X как в течение рассматриваемого
такта, так и существовавшими в ряде предыдущих тактов. Поэтому в комбинационных
устройствах при пассивных уровнях входных сигналов выходные возвращаются в
исходное состояние, а в последовательностных хранят предыдущее состояние. Для
этого в последовательностных устройствах кроме логических должны быть еще и
запоминающие элементы. Подобно входным и выходным переменным, переменные,
сохраняемые в памяти устройства, тоже двоичные и зависят от значений входных
переменных в предыдущих тактах.
.2 Интерфейсы передачи данных
Передача цифровой информации производится по различным сетям. Каждая из
сетей имеет свои особенности, назначение и реализуется на определенном типе
кабелей. Для подключения к сети все устройства должны иметь платы с
соответствующим цифровым стандартом (интерфейс). Для каждого типа интерфейса и
вида кабеля существуют ограничения по числу подключаемых устройств, длине
кабеля и скорости передачи.
HART-протокол
как способ передачи цифровой информации разработан фирмой Rosemount и занимает промежуточное положение
между токовым и чисто цифровым сигналами. Он основан на методе передачи данных
с помощью частотной модуляции. На выходной токовый сигнал 4... 20 мА
измерительных преобразователей накладываются импульсы переменного тока, причем
сигнал с частотой 1 200 Гц соответствует логической единице, а 2 200 Г
логическому нулю (рис. 8.3).
Основное достоинство HART-протокола
- возможность одновременного использования аналогового токового и цифрового
сигналов в одной паре проводов, что позволяет подключать к одной линии полевые
устройства с различным выходом.
Интерфейс RS-232 является
наиболее простым среди RS-интерфейсов
(RS означает «рекомендуемый стандарт»).
Это стандарт последовательной синхронной и асинхронной передачи двоичных данных
между терминалом и конечным устройством. В нем источник и приемник сигналов
имеют заземленную точку. Информация передается в инверсном коде двухполярными
потенциальными сигналами, логической единице соответствует-12 В, а логическому
нулю + 12 В.
В отсутствие передачи данных линия находится в состоянии логической
единицы (-12 В). Поток данных передается по одному проводу бит за битом, т.е.
передающая сторона по очереди выдает в линию 0 и 1, а принимающая отслеживает
их и запоминает. Данные передаются пакетами по одному байту (8 бит). Каждый
байт обрамляется стартовым и стоповыми битами. Стартовый бит всегда передается
уровнем логического нуля, а стоповый - единицей. Может также присутствовать бит
паритета. Его состояние определяется настройками: он может дополнять число
единичных битов данных до нечетности, четности. Эта передаваемая
последовательность называется фреймом. Данные могут передаваться как в одну,
так и в другую сторону (дуплексный режим). Скорость передачи данных стандартом
не нормируется и может составлять от 110 до 19 200 бит в секунду.
Недостатком этого стандарта является низкая помехозащищенность, что
ограничивает длину линии связи до 15 м. Линия связи соединяет источник сигнала
с одним приемником. Последней модификацией данного стандарта является
модификация Е, принятая в 1991 г. Как стандарт EIA/TIA-232E.
Интерфейс RS-485, получивший
широкое распространение, обеспечивает передачу информации на расстояние от 120
до 1200 м, при скорости передачи от 100 до 104 бит в секунду (минимальное
расстояние соответствует максимальной скорости передачи). В качестве линий
связи применяется витая экранированная пара с подключением до 32 устройств со
стандартным входным сопротивлением.
Возможно использование оптического кабеля. В основе интерфейса Л5-485
лежит принцип дифференциальной передачи данных (рис. 8.4, б).
Суть его заключается в передаче одного сигнала (импульсы напряжения ± 1,5
В) по двум проводам, причем по одному проводу (условно А) идет оригинальный
сигнал, а по другому (условно В) - его инверсная копия [66].
Глава 9. МИКРОПРОЦЕССОРЫ
.1 Основные сведения о микропроцессорах
Микропроцессор (МП) - это программно-управляемое устройство,
осуществляющее процесс обработки цифровой информации и управление им. Основное
отличие МП от всех ранее рассмотренных цифровых устройств заключается в способе
обработки информации.
В обычных цифровых устройствах - как комбинационных, так и
последовательностных - обработка входных сигналов осуществляется аппаратно, за
счет схемы соединения различных элементарных элементов - И, ИЛИ, НЕ. В МП
процесс обработки информации осуществляется программно, т. е. путем
последовательного выполнения элементарных действий - команд программы, и результат
обработки определяется этой программой.
Микропроцессорная система (МПС) состоит из микроЭВМ и набора устройств
ввода/вывода информации, или внешних устройств (ВУ). ВУ представляют собой
последовательные и параллельные порты, к которым подключаются устройства,
обеспечивающие вычислительный процесс и связь с оператором (монитор,
клавиатура, внешние запоминающие устройства и т.д.).
Структура МПС является магистрально-модульной, т. е. она состоит из
набора модулей, подключенных к общим магистралям, называемым шинами.
Шина - это набор линий связи, по которым передается информация
определенного типа, происходит обмен информацией между различными модулями
системы.
В состав микроЭВМ кроме микропроцессора (центрального процессорного
элемента) входят постоянное запоминающее устройство ПЗУ, оперативное
запоминающее устройство ОЗУ и блок интерфейса.
ПЗУ предусмотрено для хранения управляющих программ, исходных данных,
необходимых для обработки информации, и полученных результатов.
ОЗУ - для хранения информации, которая может изменяться в процессе работы
системы (данные, промежуточные результаты вычислений и программы, исполняемые в
текущий момент времени). Весь обмен информацией МП с ВУ осуществляется через
блок интерфейса. ВУ передают данные из внешней среды в МП или ОЗУ или получают
их из микроЭВМ.
Взаимодействие узлов микроЭВМ между собой осуществляется с помощью трех
шин: шины адреса (ША), шины данных (ШД) и шины управления (ШУ).
Чтобы МП мог однозначно выбрать нужную ячейку памяти или регистр ВУ, они
имеют адреса. Адрес ячейки (регистра) передается от МП в память или
интерфейсный блок по ША.
ШД является двунаправленной, так как передача данных по ней
осуществляется как из МП в память и интерфейс, так и в обратном направлении.
ША и ШД состоят из параллельных линий, передача информации по которым
осуществляется одновременно для всех линий. Число линий ШД определяется
разрядностью МП, а ША - объемом памяти, т.е. разрядностью двоичного кода,
необходимого для адресации всех ячеек.
ШУ состоит из отдельных линий, по которым передаются те или иные
управляющие сигналы. В основном они передаются из МП в остальные узлы.
ВУ в зависимости от способа передачи информации разделяются на две
большие группы: устройства, обменивающиеся параллельными словами данных и
подключенные соответственно к параллельной шине, и устройства, обменивающиеся
информацией в последовательном коде, т.е. последовательно, бит за битом, и
подключенные к однопроводной шине.
Основными узлами МП являются:
устройство управления (УУ);
регистр команд (РК);
дешифратор команд (ДШК);
арифметико-логическое устройство (АЛУ);
регистр флажков (РФ);
набор внутренних регистров, состоящий из адресных регистров (РА) и
регистров данных (РД);
программный счетчик (ПС);
устройство управления шинами (УУШ).
Координация работы всех узлов в соответствии с выполняемой командой
осуществляется тремя узлами: УУ, РК и ДШК. РК обеспечивает хранение команды в
течение всего цикла ее исполнения, а ДШК выполняет расшифровку кода этой
команды.
Программируемые логические контроллеры (ПЛК) - микропроцессорные
устройства, предназначенные для управления технологическим процессом. Они
представляют собой устройства, предназначенные для сбора, преобразования,
обработки, хранения информации и выработки команд управления в реальном времени
в соответствии с набором записанных в них программ.
Работа контроллера заключается в выполнении следующих операций:
) сбор сигналов с датчиков;
) обработка сигналов согласно алгоритму управления;
) выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с
частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение
полного цикла, называется временем (или периодом) сканирования. В большинстве
современных ПЛК сканирование может настраиваться пользователем в диапазоне от
20 до 30 000 миллисекунд.
Для быстрых технологических процессов время сканирования может составлять
20 мс, однако для большинства непрерывных процессов период 100 мс считается
вполне приемлемым.
По функциональным признакам в ПЛК (рис. 9.1) можно выделить следующие
элементы:
) центральный процессор (ЦП), предназначенный для выполнения команд
(инструкций) управляющей программы и обработки данных, размещенных в памяти;
) память контроллера с жестким распределением областей для размещения
различных типов данных;
) модуль самодиагностики (МСД), который осуществляет контроль и
диагностику элементов контроллера в процессе его работы и сигнализирует при
обнаружении неисправностей;
) модуль связи с оператором (МСО), с помощью которого выполняется
программирование контроллера и оперативное управление в процессе эксплуатации;
) модули ввода, обеспечивающие прием и первичное преобразование
информации от датчиков объекта управления;
) модули вывода, предназначенные для выдачи управляющих сигналов на
исполнительные устройства (механизмы) объекта управления.
Модули ввода/вывода также называют устройствами связи с объектом (УСО).
Основными их элементами являются АЦП и ЦАП.
Интерфейс (совокупность технических и программных средств, обеспечивающих
взаимодействие различных устройств) задает параметры, процедуры и
характеристики взаимодействия контроллера с верхним уровнем АСУ ТП или с другим
контроллером в случае распределенной структуры АСУ ТП.
Посредством внутриблочной шины различные блоки ПЛК связываются между
собой через общую магистраль.
В составе с другими вспомогательными устройствами контроллеры выполняют
различные функции: обработка информации, управление, регулирование, мониторинг,
измерение, сигнализация, контроль.
9.2 Аналого-цифровое и цифро-аналоговое
преобразование информации
В основе функционирования любой системы автоматизации лежат
информационные процессы - сбор датчиками информации об объекте, ее
преобразование, передача, обработка и хранение.
Прежде чем информация дойдет от отправителя до получателя, она
подвергается различным преобразованиям. Это связано с тем, что технологические
параметры, характеризующие состояние объекта управления, представляют собой
непрерывные физические величины (температура, давление, уровень, скорость и
т.д.).
Датчик, измеряющий какой-либо параметр, преобразует его также в
непрерывный сигнал, удобный для дальнейшей передачи. Такой сигнал называется
аналоговым - это сигнал, определенный для любого момента времени, т.е. он
представляет собой непрерывную функцию времени. Обработка же полученной
информации посредством микропроцессоров требует представления информации в
цифровой форме. В то же время существует достаточно большое количество
устройств, рассчитанных на унифицированный аналоговый входной сигнал, что
требует обратного преобразования информации в аналоговую форму.
Все параметры подвергаются двум основным преобразованиям:
аналого-цифровому и цифроаналоговому.
Аналого-цифровые преобразователи (АЦП) преобразуют информацию о сигнале в
аналоговой форме, т. е. о напряжении, непрерывном во времени, в информацию о
нем в форме цифрового кода обычно в двоичной системе счисления. Они
используются, например, для ввода информации в управляющую ЭВМ от датчиков
состояния объекта управления.
Основными элементами этого АЦП являются компараторы на базе операционного
усилителя (ОУ), работающего в импульсном режиме.
Опорные напряжения для компараторов АЦП (рис. 9.2, а) задаются источником
постоянной ЭДС Е0 и делителем напряжения на резисторах R.
Цифроаналоговые преобразователи (ЦАП) преобразуют цифровой двоичный код в
аналоговое выходное напряжение (ток). Это позволяет, например, использовать
цифровой двоичный код для управления работой исполнительных механизмов, таких
как электрические двигатели, реле, выключатели и т.д. На рис. 9.1 показана
принципиальная схема четырехразрядного ЦАП с двоичными весами сопротивлений
резисторов в цепях разрядов.
Аналоговый сумматор выполнен на базе операционного усилителя.
Сопротивление цепи старшего разряда равно R; сопротивление каждого предыдущего разряда в два раза
больше, т.е. для четырехразрядного кода сопротивление младшего разряда
составляет 8R. Сопротивление обратной связи - Rос. Ключи St управляются кодом, подаваемым на вход
ЦАП.
Ключами служат транзисторы, обычно полевые, базовые цепи которых
подключаются к источнику цифровых сигналов в двоичной системе счисления.
Кроме АЦП и ЦАП в цифровых устройствах автоматики широко используются еще
несколько элементов - коммутаторы, дешифраторы, счетчики.
Коммутатор (переключатель, мультиплексор) представляет собой устройство с
несколькими информационными и управляющими входами и одним выходом. Эти
устройства применяются в аналоговых и цифровых многоточечных измерительных
приборах, устройствах связи с объектом. Коммутаторы бывают: электромеханические
и электронные. Частота коммутации аналоговых сигналов составляет 1... 100 Гц,
импульсных - десятки кГц.
Счетчик относится к последовательностным устройствам; он предназначен для
хранения двоичного кода числа и выполнения микроопераций счета, заключающихся в
изменении значения числа на +1. В суммирующих счетчиках число возрастает на 1,
а в вычитающих - уменьшается. Если в счетчике выполняются обе операции, он
называется реверсивным.
Основной характеристикой счетчика является модуль счета Кс.
Дешифратор (декодер) представляет собой устройство, которое преобразует
т-разрядный двоичный код на входе в л-разрядный двоичный код на выходе.
Дешифраторы используются в блоках цифровой индикации, цепях логического
управления исполнительными механизмами и т.д. На рис. 9.4, а приведена одна из
наиболее распространенных схем использования дешифратора - для высвечивания
десятичных цифр на светодиодном индикаторе. Все цифры от 0 до 9 представляются
четырехразрядным двоичным кодом, который подается на информационные входы х0,
х1 х2, х3. Светодиодные индикаторы содержат
семь светящихся сегментов А, В, С, D, Е, F, G (рис. 9.4, б), из которых составляются стилизованные
изображения всех десятичных цифр. Соответственно дешифратор имеет семь выходов,
каждый из которых включает свой сегмент.
Таким образом, дешифраторы преобразуют двоичные сигналы на информационных
входах в активные уровни выходных сигналов.
Дешифратор работает при наличии на управляющем входе U сигнала высокого уровня; при наличии
сигнала низкого уровня все выходы дешифратора обнуляются независимо от сигналов
на информационных входах.
ЗАКЛЮЧЕНИЕ
Представленный в учебном пособии материал позволяет ознакомиться с
основами и классификацией методов и средств измерений; получить четкое
представление о технологическом комплексе, о точках съема сигнала параметров
технологического процесса; усвоить принципиальные схемы основных средств
измерений, принципы работы датчиков и реле, технические возможности
микропроцессорной аппаратуры и средств автоматики, правила построения
структурных схем, критерии регулирования, перспективы внедрения ЭВМ в процессе
разработки и эксплуатации скважин, правила технически грамотной эксплуатации
аппаратуры и средств автоматики.
Весь материал разбит по главам, каждая из которых может быть представлена
в виде отдельной лекции с вынесением некоторой части материала на
самостоятельное изучение обучаемыми.
Для приобретения практических навыков работы с измерительной техникой,
основными средствами автоматизации, предусмотрен цикл практических и
лабораторных работ с использованием специальной учебной техники в
специализированных лабораториях.
Дальнейшее изучение средств автоматизации производственных процессов в
нефтегазовой сфере предполагает применение полученных теоретических знаний и
навыков практической работы при эксплуатации специализированного промыслового
оборудования.
Литература
1. <#"888358.files/image180.gif">
Решающий вклад в разработку спиртовой конструкции термометра в 1709 году
внёс
Габриэль Даниэль Фаренгейт
Андерс Цельсий
Мигель Сааведра Сервантес
-градусную шкалу термометра предложил
Габриэль Даниэль Фаренгейт
Андерс Цельсий
Мигель Сааведра Сервантес
Принцип действия биметаллического термометра основан на
использовании в его чувствительном элементе двух металлов с различными
температурными коэффициентами линейного расширения
применении спиртового состава и ртути в равных пропорциях
Принцип действия манометрических термометров основан на изменении
давления жидкости, газа или пара, помещенных в замкнутом объеме,
при нагревании или охлаждении этих веществ
при растворении или выпаривании этих веществ;
термометр
термопара
терморегулятор.
Радиационные пирометры измеряют полную (световую и тепловую) энергию
излучения тела с помощью
телескопа и вторичного прибора
дефектоскопа и первичного прибора
стетоскопа и термометра.
Какие приборы измеряют температуру по отношению интенсивностей
монохроматического излучения тела для двух диапазонов длин волн красного и
сине-зеленого участков видимой части спектра?
цветовые пирометры
монохроматические омметры
ртутные градусники
Поплавковым уровнемером называется уровнемер, основанный на измерении
положения поплавка, частично погруженного в жидкость, причем степень погружения
поплавка (осадка) при неизменной плотности жидкости
не зависит от контролируемого уровня
зависит от контролируемого уровня
зависит от материала поплавка.
Буйковыми уровнемерами называются уровнемеры, основанные на
законе Архимеда
законе Бернулли
законе Гей-Люссака
законе Бойля-Мариотта
Основным принципом действия гидростатических уровнемеров является
измерение
гидростатического давления, оказываемого жидкостью
плотности воды, содержащейся в резервуаре
сопротивления статических характеристик резервуара и калькуляционный
расчет среднего динамического ускорения при движении водяного потока сверху
вниз и обратно в исследуемом резервуаре при стабильной геополитической
обстановке в нефтедобывающих конгломератах
Емкостными уровнемерами называются уровнемеры, основанные на
зависимости электрической емкости конденсаторного преобразователя,
образованного одним или несколькими стержнями, цилиндрами или пластинами,
частично введенными в жидкость, от ее уровня
зависимости электрического сопротивления преобразователя, образованного
одним или несколькими стержнями, цилиндрами или пластинами, частично введенными
в жидкость, от ее уровня.
Действие какого прибора основано на поглощении Y -лучей при прохождении
через слой вещества?
радиационного веществовзвеса
радиоизотопного уровнемера
андронного коллайдера
В уровнемерах поглощения положение уровня определяется по
ослаблению интенсивности ультразвука при прохождении через слои жидкости
и газа
усилению интенсивности ультразвука при прохождении через слои жидкости и
газа
В резонансных уровнемерах измерение уровня производится посредством
измерения частоты собственных колебаний столба газа над уровнем жидкости,
которая зависит
от высоты уровня
температуры насыщения
Измерительный прибор или измерительная установка для измерения давления
или разности давлений с непосредственным отсчетом их значения называется
манометром
давлеметром
акселерометром.
Манометр для измерения атмосферного давления называется
барометром
вакуумметром
дифманометром
U-образный
жидкостной манометр состоит из
двух соединенных между собой вертикальных трубок, наполовину заполненных
жидкостью
трех соединенных между собой вертикальных трубок, наполовину заполненных
жидкостью
двух соединенных между собой вертикальных трубок, одна из которых
заполнена жидкостью, а другая газом.
Чашечный жидкостный манометр состоит из
соединенных между собой чашки и вертикальной трубки, причем площадь
поперечного сечения чашки существенно больше, чем трубки
соединенных между собой чашки и «блюдца», причем площадь поперечного
сечения чашки существенно меньше, чем «блюдца»
соединенных между собой чашки и вертикальной трубки, причем площадь
поперечного сечения чашки существенно меньше, чем трубки
В уравнении равновесия дифференциального манометра типа „кольцевые
весы"
, где R2 это
расстояние от оси вращения до центра тяжести противовеса
радиус стенок манометра типа „кольцевые весы"
расстояние между показанием стрелки манометра и нулевым значением
Поршневой манометр - это манометр, в котором
действующее на поршень измеряемое давление преобразуется в емкость и
определяется по значению емкости, необходимой для ее фиксации.
действующее на поршень измеряемое давление преобразуется в силу и
определяется по значению силы, необходимой для ее уравновешивания.
действующее на поршень измеряемое давление преобразуется в электрический
ток и определяется по его значению, необходимому для точного отображения на
циферблате манометра.
Мембрана упругого чувствительного элемента поршневого манометра
представляет собой
поршень, двигающийся внутри контура, и создающий давление, которое
является эталонным для показаний прибора
упругую пластину в форме диска, жестко закрепленную по наружному контуру,
прогиб которой определяется действующим на нее давлением
упругую пленку в форме диска, свободно двигающуюся по наружному контуру,
движение которой определяется действующим на нее давлением
Сильфон упругого чувствительного элемента манометра это
прибор в форме цилиндра, имеющий специально оборудованное приспособление
для крепления газовых баллонов и предназначенный для создания газо-жидкостной
смеси.
тонкостенный цилиндр, боковая поверхность которого гофрирована с целью
увеличения его прогиба под действием давления.
баллон, боковая поверхность которого прорезинена с целью увеличения его
прогиба под действием давления кулачков стрелки манометра при постоянстве
температуры
Резистивные манометры основаны на
подборе резисторов для получения точных показаний манометра.
поддержании постоянства давления проводников при механическом воздействии
силы Тынчерова
изменении активного электросопротивления проводников при их механической
деформации
Измерительный преобразователь, который преобразует деформации поверхности
твердого тела в изменение его электросопротивления, называется
тензорезистором
электросопротивлятором
активным деформатором
Выражение
pVM= m RT/μ, где VM- молярный объем; Т- абсолютная температура идеального
газа, масса газа; μ - масса одного киломоля газа; R=8,3144621
Дж/(мкмоль ), называется
уравнением
Клайперона-Менделеева
равенством
Мендельштама -Папалекси
уравнением
Тынчерова-Горюновой
Расходомеры постоянного перепада давления, работают по методу
измерения объема
дросселирования потока
пикирования оттока
Падение давления в момент, когда жидкость или газ проходит через суженную
часть трубы называется
эффектом Вентури
фактом суженного падения
принципом Ниагары
Ротаметры предназначены для измерения
максимально раскрытой полости рта в районе окологубного отверстия в
период наивысшего эмоционального напряжения испытуемого
объёмного расхода плавно меняющихся однородных потоков чистых или
слабозагрязнённых жидкостей и газов с дисперсными включениями
Раздел 5. МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ ВИБРАЦИИ
Размах (Пик-Пик) - это разница между
положительным и отрицательным пиками.
нулевой точкой и положением равновесия
Максимальная амплитуда (Пик) - это максимальное отклонение
от нулевой точки, или от положения равновесия
от минимального до максимального значения амплитуды
Демпфирование - это, по существу,
мера поглощения энергии вибраций
способ преобразования частоты в напряжение
мера возрастания энергии вибраций
Интервал времени, который необходим для завершения одного цикла
колебания, то есть это время между двумя последовательными моментами
пересечения нулевой точки в одном направлении, называется
периодом колебаний
временем нулевой точки
временем цикла
Виброскорость обычно измеряют в
м/с или в мм/с
г/м или кг/т
км/ч
Единица измерения энергии и работы в международной системе (СИ)
Джоуль
моль
Кулон
Собственная частота идеальной системы масса-пружина без демпфирования
дается соотношением:
, где k - это
коэффициент упругости (жесткость) пружины
коэффициент Розенблатта
поправочный коэффициент резонанса
Состояние системы, при котором частота возбуждения близка к собственной
частоте конструкции, то есть частоте колебаний, которые будет совершать эта
система, будучи предоставлена самой себе после выведения из состояния
равновесия, называется
резонансом
состоянием покоя
состояние произвольных колебаний
Какое понятие иллюстрирует данный рисунок?
тест-удар
быстрых алгоритмов Фурье
прочности слесарного инструмента
Средство измерения параметров вибраций носит название
виброметр
вибромер
вибратор
Раздел 6. ИЗМЕРЕНИЕ ФИЗИКО-ХИМИЧЕСКИХ СВОЙСТВ ЖИДКОСТЕЙ И ГАЗОВ
Плотность нефти, измеренная при 20°С, отнесенная к плотности воды,
измеренной при 4°С, называется
относительной плотностью нефти
подготовленной плотностью
водонефтяной плотностью
Прибор для определения плотности жидкости по глубине погружения поплавка,
который представляет собой стеклянную полую трубку, зауженную в верхней части и
герметично запаянную с обоих концов, называется
нефтеденсиметром
поплавковым измерителем
ритортой
За единицу динамической вязкости, т. е. вязкости такой жидкости, в
которой на 1 м2 поверхности слоя действует сила, равная одному
ньютону, если скорость между слоями на расстоянии 1 см изменяется на 1 см/с,
принят
паскаль-секунда
кг/м
бар/мин
В уравнении гидродинамики для стационарного течения жидкости, с вязкостью
η
через капилляр
вискозиметра:
, где L - обозначает
длину капилляра капиллярного вискозиметра, м
-расстояние между входом и выходом трубки вискозиметра, см
коэффициент Пуазейля для стационарного течения жидкости
Метод падающего шарика вискозиметрии основан на законе Стокса, согласно
которому скорость свободного падения твердого шарика в вязкой неограниченной
среде можно описать уравнением , где r - это
-радиус шарика
постоянная Больцмана
сопротивление жидкости
Принцип работы какого вискозиметра иллюстрирует рисунок?
ротационного
вибрационного
Стокса
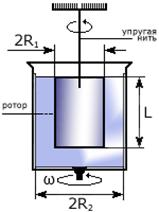
Свойство нефти терять легкие фракции называется
испаряемостью
облегчением
насыщением
На фото изображен

индивидуальный пробоотборник ИП1
пресс-камера ПК - 47
термостат
Отношение объема воды, содержащейся в породе, к объему пор этой же породы
называется коэффициентом
водонасыщенности
объема
породы
Измерение плотности газа с применением плотномеров любого типа
допускается в случае, если они
не изменяют структуру потока
изменяют структуру потока
способно вводить дополнительные реагенты для повышения точности измерений
На рисунке изображен принцип работы
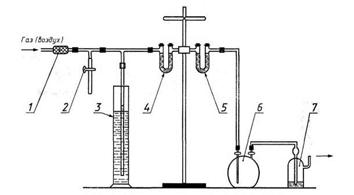
пикнометра
хроматографа
трубки Вентури
Раздел 7. РЕЛЕЙНЫЕ ЭЛЕМЕНТЫ
Реле - это устройство, которое автоматически осуществляет скачкообразное
изменение (переключение) выходного сигнала под воздействием управляющего сигнала,
изменяющегося
непрерывно в определенных пределах
кратковременно в неопределенных пределах
в зависимости от вида материала, используемого для изготовления
контактной группы реле.
Если реле используются для переключения мощных цепей тока, то они
называются
контакторами
переводчиками
коммутаторами
Переключение геркона из между состоянием «включен» и «выключен»
происходит под действием
напряжения
магнитного поля
электрического тока
На рисунке изображена схема работы
поляризационного реле
неполяризованного реле
втягивающего реле
Раздел 8. ПЕРЕДАЧА ИНФОРМАЦИИ В СИСТЕМАХ АВТОМАТИЗАЦИИ
Телеуправление обеспечивает
управление с помощью телевизионных устройств
дистанционное управление объектом контроля
непосредственное управление объектом контроля
Процесс наложения сообщения на переносчик информации называется
модуляцией
мутацией
деформацией
Двум двоичным цифрам соответствуют
одно состояние электронной схемы
два состояния электронной схемы
множество состояний электронной схемы
Восьмиразрядный код называют
разрядом
битом
байтом
Выражение описывает логическую операцию
дизъюнкции
конъюнкции
инверсии
Выражение описывает закон
Моргана
стрелки Пирса
штриха Шеффера
Элемент ИЛИ (1) - это
схема логического умножения, коньюнктор
схема логического сложения, дизъюнктор
схема логического отрицания, инвертор
Если за один такт в устройство передается один из разрядов двоичного
числа, то устройство работает с
параллельным кодом
последовательным кодом
Раздел 9. МИКРОПРОЦЕССОРЫ
Программируемые логические контроллеры (ПЛК) - микропроцессорные
устройства, предназначенные для
управления технологическим процессом
контроля работы арифметико-логического устройства
программного управления оперативной памятью микропроцессора
Коммутатор (переключатель, мультиплексор) представляет собой устройство
с несколькими информационными и управляющими входами и одним выходом
с одним информационным входом и управляющими выходами
с многими управляющими входами и одним информационным выходом
Посредством внутриблочной шины различные блоки программируемого
логического контроллера связываются между собой через
второстепенную шину
общую магистраль
оперативную память
Приложение 2
Перечень практических и лабораторных работ по дисциплине с использованием
лабораторных установок
. Изучение схем сумматоров и интеграторов на основе операционных
усилителей;
2. Исследование сельсинов, работающих в индикаторном и
трансформаторном режимах;
. Исследование потенциометрических измерительных преобразователей;
. Исследование индуктивных и индукционных измерительных
преобразователей;
. Исследование следящей системы на потенциометрах;
. Исследование следящей системы на сельсинах;
. Электрические цепи в релейной схеме;
. Определение сигналов в типовых функциональных узлах техники
автоматики;
. Аналоговое измерение температуры и угла;
. Управление на основе температурной зависимости;
. Оптопара и ее применение в системах автоматизации;
. Переключающий усилитель;
. Сравнение свойств сигнала транзистора и тиристора;
. Исследование реверсивного широтно-импульсного преобразователя на
IGBT транзисторах;
. Исследование схем автоматизированного пуска двигателя
постоянного тока;
. Исследование схем автоматизированного торможения двигателя
постоянного тока;
. Исследование одноконтурной системы автоматического управления
(САУ); стабилизации скорости ДПТ с регулятором скорости;
. Исследование двухконтурной САУ стабилизации скорости ДПТ с
регулятором скорости и тока;
. Исследование одноконтурной САУ стабилизации положения ДПТ с
регулятором положения;
. Исследование двухконтурной САУ стабилизации положения ДПТ с
регуляторами положения и скорости;
. Исследование трехконтурной САУ стабилизации положения ДПТ с
регуляторами положения, скорости и тока;
. Исследование скоростных и механических характеристик двигателя
постоянного тока независимого возбуждения (ДПТ НВ) в разомкнутой системе;
. Исследование скоростных и механических характеристик ДПТ НВ в
замкнутой САР;
. Исследование импульсного датчика положения;
. Составление программ для программируемого логического
контроллера (ПЛК) Mitsubishi Electric ALPHA-2 с помощью среды программирования
ALPCS/WIN-EU на компьютере. Запись программ в память ПЛК;
. Исследование схем автоматизации с применением ПЛК Mitsubishi
Electric ALPHA-2;
. Исследование систем автоматизированного регулирования (САР) с
ПИД-регулятором на основе ПЛК Mitsubishi Electric ALPHA-2;
. Реализация регуляторов САР на операционных усилителях;
. Реализация регуляторов САР на основе программируемого
логического контроллера;
. Изучение бесконтактных конечных выключателей и индуктивного
преобразователя перемещений;
. Изучение датчиков линейного положения;
. Изучение датчиков частоты вращения;
. Изучение датчиков углового положения;
. Изучение датчиков тока и напряжения;
. Изучение датчиков температуры;
. Изучение датчиков магнитного поля;
. Изучение датчика освещённости;
. Датчики скорости вращения;
. Изучение конструкции и динамики подачи установки насосной
винтовой с поверхностным приводом;
. Изучение конструкции и построение рабочей характеристики
установки центробежного насоса;
. Изучение конструкции ключа КМУ и определение момента затяжки для
различных диаметров труб.
. Станция контроля процесса бурения "ЛЕУЗА-2"
Приложение 3
Перечень тем расчетно-графических работ (рефератов)
В реферативном обзоре по теме необходимо осветить поставленные вопросы,
обзор иллюстрировать схемами, рисунками, графиками, оформленными по ГОСТ. Тема
выбирается по номеру в журнале посещений группы.
Внимание! В тексте реферата обязательно указать ссылки на литературу в [
], например [1]. В конце реферата перечислить все эти ссылки в СПИСКЕ
ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ с расшифровкой источников. Материал рефератов сдается в
распечатанном виде + в электронном виде на СD для проверки в системе
«Антиплагиат».
Объем 9-10 листов. Структура работы: анализ темы, постановка задачи,
решение, выводы.
Тема 1. Измерители веса снаряда и осевой нагрузки
. Осевая нагрузка- как важнейший режимный параметр.
. Точки съема сигнала (ТСС) при подаче инструмента со шпинделя и с
лебедки, их анализ.
. Датчики, их характеристика.
. Принципиальная схема, характеристика аппаратуры, достоинства,
недостатки аппаратуры.
. Правила эксплуатации аппаратуры.
. Общий вывод.
Тема 2. Расходомеры промывочной жидкости
. Расход промывочной жидкости- как важнейший режимный параметр.
. Классификация способов и методов измерения расхода жидкости, в том
числе и промывочной.
. Датчики расхода жидкости.
. Точки съема сигнала (ТСС), их анализ, датчики расходомеров промывочной
жидкости, их принцип работы, характеристика.
. Принципиальная схема расходомеров промывочной жидкости, характеристика;
условия и правила эксплуатации.
. Достоинства и недостатки рассматриваемых расходомеров, общий вывод.
Тема 3. Дебитомеры
. Общие вопросы измерения дебита скважин: область применения, решаемые
задачи;способы откачки воды из скважин, характеристика потока.
. Классификация способов и методов измерения расхода жидкости, их анализ
с точки зрения реализации в дебитомерах.
. Датчики дебитомеров, их принцип работы, конструкция, характеристика.
. Аппаратура (дебитомеры), характеристика, описание схемы, работы.
Правила эксплуатации. Достоинства, недостатки.
. Общий вывод.
Тема 4. Измерители и ограничители крутящего момента
Задачи, решаемые с использованием измерителей крутящего момента при
сооружении скважин.
. Классификация способов измерения крутящего момента.
. Точки съема сигнала (ТСС) для датчиков крутящего момента на процесс
бурения, их анализ.
. Датчики крутящего момента, их характеристика.
. Принципиальная схема аппаратуры, характеристика.
. Правила эксплуатации аппаратуры, достоинства, недостатки.
. Общий вывод.
Тема 5. Скважинные манометры и термометры
. Назначение, область применения.
. Датчики, их принцип работы, характеристика.
. Способы получения информации.
. Аппаратура, техническая характеристика.
. Правила эксплуатации.
. Общий вывод.
Тема 6. Скважинные уровнемеры
. Общие вопросы измерения уровня воды в скважинах; решаемые задачи.
. Классификация способов и методов измерения уровня жидкости, их анализ с
точки зрения реализации в скважинных уровнемерах.
. Датчики скважинных уровнемеров, их принцип работы, конструкция,
характеристика.
. Аппаратура (уровнемеры), характеристика, описание схемы, работа.
Правила эксплуатации; достоинства, недостатки.
. Общий вывод.
Тема 7. Комплексная буровая контрольно-измерительная аппаратура
. Область применения.
. Аппаратура, техническая характеристика.
. Комплектация, узлы, датчики, их принцип работы, точки съема сигнала
(ТСС).
. Экономическая эффективность применения аппаратуры.
Тема 8. Аппаратура для измерения и регистрации механической скорости
бурения
. Важность параметра.
. Точки съема сигнала (ТСС) при подаче инструмента со шпинделя и при
подаче с лебедки, их анализ.
. Датчики, их принцип работы, конструкции.
. Принципиальная схема аппаратуры, работа.
. Правила эксплуатации.
. Общий вывод.
Тема 9. Регистраторы в буровой контрольно-измерительной аппаратуре
. Назначение.
. Описание конкретных регистраторов аппаратуры: ГП, ГИВ-6, ИРБ,
МКН, КУРС, РУМБ, самопишущие ваттметры; регистраторы в аппаратуре кафедры
ТР ТПУ: РСГ-ТПУ, РСБ-ТПУ, С-ТПУ, РС-ТПУ,СДУ-ТПУ.
. Скважинные регистраторы.
. Запись параметров при компьютиризации буровх технологических процессов.
. Выводы.
Тема 10. Неразрушающие методы контроля бурового оборудования и
инструмента
. Необходимость контроля, виды контроля (входной, эксплуатационный) и
задачи.
. Сущность неразрушающих методов контроля.
. Разновидности неразрушающих методов контроля, классификация.
. Датчики, их принцип работы и конструкция. Принципиальная электрическая
схема аппаратуры.
. Правила работы, эксплуатация, контроль, выбраковка.
. Общие выводы.
Тема 11. Телеконтроль в бурении скважин
. Решаемые задачи, область применения.
. Конкретные системы телеконтроля, техническая характеристика. Узлы,
датчики, канал связи. Принцип работы датчиков.
. Экономическая эффективность систем. Перспективы развития. Выводы.
Тема 12. Каналы связи забой-устье
. Назначение, классификация.
. Структурная схема канала связи.
. Описание каналов связи, техническая характеристика.
. Перспективы развития. Выводы.
Тема 13. Забойные устройства подачи долота (УПД)
. Назначение, область применения, классификация.
. Описание и анализ конкретных УПД.
. Выводы и предложения.
Тема 14. Автоматизация спуско-подъемных операций
. Цель и задачи автоматизации СПО.
. Пути уменьшения времени на СПО.
. Варианты построения автоматизированных систем.
. Комплексы АСП, СПА-ВИТР: узлы. их работа, временная диаграмма работы
узлов, последовательность, совмещение операций. Другие комплексы.
. Выводы.
Тема 15. Обработка диаграмм записи параметров процесса бурения и
разработка рекомендаций по оптимизации поставленной задачи
Разработать методику отбора и обработки диаграмм записи параметров
процесса бурения в зависимости от поставленной цели; разработать таблицу для
внесения и обработки данных. Перечень регистрируемых параметров: осевая
нагрузка, частота оборотов, интенсивность промывки, механическая скорость
бурения, крутящий момент на шпинделе, затраты мощности на бурение. Привести
возможные рекомендации по рассматриваемым вопросам.
Цели (вариант выдается преподавателем)-
. Оптимизация режимов бурения серийными шарошечными долотами.
. Оптимизация баланса рабочего времени.
. Оптимизация энергозатрат.
. Уточнение геологического разреза.
. Отработка режимов бурения экспериментальными долотами.
. Определение причин аварии с буровыми трубами.
. Сравнительный анализ работы двух буровых бригад.
. Анализ работы передовой бригады.
Приложение 4
Список основной и дополнительной литературы
Основная литература:
. Востриков, А.С. Теория автоматического регулирования [Текст]: учебное
пособие / А.С. Востриков, Г.А. Французова. - Изд. 2-е, стер. - М.: Высшая
школа, 2006. - 365 с.: ил.
. Андреев, Е.Б. Технические средства систем управления технологическими
процессами в нефтяной и газовой промышленности [Текст]: учебное пособие / Е.Б.
Андреев, В.Е. Попадько. - М.: ФГУП Изд-во «Нефть и газ» РГУ нефти и газа им
И.М. Губкина, 2005. - 270 с.3. Тынчеров, К.Т. Автоматизация производственных
процессов в бурении [Текст]: учебное пособие / К.Т. Тынчеров, М.В. Горюнова. -
Уфа: Изд-во УГНТУ, 2013. - 200 с.
. Тынчеров К.Т., Грюнова М.В. Автоматизация производственных процессов и
автоматика [Текст]: Учебно-метод. пособие к выполнению лабораторных и
практических работ по дисциплине Основы автоматизации технологических процессов
нефтегазового производства на лабораторном стенде НТЦ-09.12.1- Уфа: Изд-во
УГНТУ, 2015. - 115 с.
Тынчеров К.Т., Грюнова М.В. Станция контроля процесса бурения
"ЛЕУЗА-2" [Текст]: Учебно-метод. пособие к выполнению лабораторных и
практических работ по дисциплине «Основы автоматизации технологических
процессов нефтегазового производства» - Уфа: Изд-во УГНТУ, 2015. - 27 с.
Дополнительная литература:
. Исакович, Р.А. Автоматизация производственных процессов нефтяной и
газовой промышленности [Текст]: учебник / Р.А. Исаакович, В.И. Логинов, В.Е.
Попадько. - М.: Недра, 1983. - 424 с.
. Исакович, Р.А. Контроль и автоматизация добычи нефти и газа [Текст]:
учебник / Р.А. Исаакович, В.Е. Попадько. - Изд. 2-е, перераб. и доп. - М.:
Недра, 1985. - 351 с.: ил.
УДК 681.5.01
ББК 33.131
Т93
Печатается по решению редакционно-издательского совета ФГБОУ ВПО УГНТУ
Рецензенты:
Заместитель генерального директора ОАО НПП ВНИИгеофизических исследований
скважин (ВНИИГИС), академик РАЕН, д-р техн. наук, профессор Л.Е. Кнеллер;
Начальник департамента добычи нефти и газа ОАО «Татойлгаз», д-р техн.
наук Р.З. Миннигаллимов.
Тынчеров К.Т.
Т93 Основы автоматизации технологических процессов нефтегазового
производства [Текст]: учеб. пособие для студентов / К.Т.Тынчеров; Уфимский
государственный нефтяной технический университет - Уфа: ФГБОУ ВПО «УГНТУ»,
2015. -420 с., 1000 экз. ISBN
Учебное пособие содержит материалы теоретического (лекционного) курса по
учебной дисциплине «Основы автоматизации технологических процессов
нефтегазового производства» в соответствии с Федеральным государственным
образовательным стандартом по направлению 131000 «Нефтегазовое дело». Пособие охватывает
все разделы учебной программы дисциплины. Помимо вводного курса в метрологию,
теорию автоматов и автоматизации особый акцент сделан на изучение конкретных
систем, устройств и приборов, применяемых в настоящее время, а также
рассмотрены перспективные направления процессов автоматизации.
Предназначено для студентов очной и заочной форм обучения по
специальности «Эксплуатация и обслуживание объектов добычи нефти», а также
преподавателей дисциплины.
Табл. 24. Ил. 77. Библиогр.: с. 120-121.
© Уфимский государственный нефтяной технический университет
УДК 681.5.01
ББК 33.131