Управляемость автомобиля и безопасность движения
Содержание
Введение
. Управляемость автомобиля
.1Основные определения
.2 Увод автомобильного колеса
.3 Поворот автомобиля с эластичными колесами
. Управляемость автомобиля и безопасность движения
.1 Значение управляемости автомобиля для безопасного движения
.2 Поворачиваемость автомобиля
.3 Устойчивость переднего и заднего мостов
.4 Оценка управляемости автомобиля ГАЗ-31105
. Управляемость как эксплуатационное качество, обеспечивающее
активную безопасность автомобиля
.1 Влияние технического состояния автомобиля на его
устойчивость и управляемость
.2 Влияние эксплуатационных факторов на управляемость и
устойчивость
.3 Приемы управления автомобилем в аварийных ситуациях
4. Органы управления
. Оценка экономической эффективности
после установления ограничения скорости
6. Экологическое состояние атмосферного воздуха в РК
7. Охрана труда
.1 Общие требования безопасности
8. Пожарная безопасность
.1 Причины пожаров на производственных объектах
.2 Права и обязанности предприятий
.3 Пути эвакуации
. Охрана окружающей среды
.1 Основные направления охраны окружающей среды в
промышленности, энергетике и на транспорте
.2 Экологические требования при проектировании, строительстве
и эксплуатации промышленных объектов
.3 Выводы об охране окружающей среды в Казахстане
Заключение
Список использованной литературы
Введение
Цель; Проведенные в СНГ исследования показывают, что автомобиль является
одним из наиболее опасных транспортных средств.
В большем комплексе мероприятий, по предупреждению ДТП и снижению тяжести
их последствий, одной из важных целей является повышение активной, пассивной и
послеаварийной безопасности транспортных средств. Как свидетельствует
статистика ДТП, около 60 % пострадавших составляет водители и пассажиры
транспортных средств. Именно поэтому мероприятиям, направленным на повышение
активной, пассивной и послеаварийной безопасности автомобилей и снижение
тяжести последствий ДТП, придается большое значение. Следует отметить, что
любое улучшение комфорта автомобилей замедляет появление усталости водителя, что
повышает безопасность движения [1,2,3].
Задачи; Совершенствование эксплуатационных свойств автомобиля,
направленное на предупреждение ДТП и исключение или хотя бы снижение тяжести
травм при ДТП, ведется по нескольким направлениям: улучшения управляемости,
устойчивости и надежности автомобиля, при передачи части задач водителя по
управлению автомобилем автоматическим системам, улучшения условий обитания в
кабине автомобиля, придания элементам салона оптимальных форм и свойств,
исключающих травмы водителя и пассажира при авариях. Поэтому на основе
исследований системы Водитель-Автомобиль и её элементов необходимо придать
автомобилю такие эксплуатационные свойства, которые обеспечивали бы уменьшение
вероятности ДТП, а в случае их возникновения исключение травм водителя и
пассажиров или, хотя бы, снижение их тяжести.
Актуальность; Ввиду того, что основной причиной ДТП является
недостаточная надежность действий человека (водителя), выполняющего функции
управляющего звена системы и неоптимальные по ряду параметров свойства
управляемого звена этой системы - автомобиля, требуется глубокое изучение
вопросов управления автомобилем, особенно в аварийных режимах движения и
практическое обучение водителей действиям в этих условиях. Должны быть изучены
перспективы дальнейшего повышения надежности системы водитель-автомобиль (ВА),
в частности, путем передачи части задач водителя автоматическим системам, за
счет поддержания необходимых комфортных условий в салоне и оснащения автомобиля
достаточным количеством систем бортовой диагностики [4,5,6].
Настоящая дипломная работа выполнена на базе материалов статистики ДТП и учета
движения на дорогах и улицах города Костаная, Костанайского УДП ГДВД Костанайской
области, а также материалов исследования конструктивной безопасности (устойчивости,
управляемости, обитаемости) автомобиля, что довольно актуально.
1. Управляемость автомобиля
.1 Основные определения
Траекторию движения любого автотранспортного средства в общем случае
можно рассматривать как криволинейную с непрерывно изменяющейся кривизной. Если
кривизна траектории близка к нулю, такое движение условно принято считать
прямолинейным [7,8,9].
Криволинейность движения обусловлена необходимостью
совершать повороты в соответствии с задаваемой водителем траекторией, а также
неизбежным отклонением автомобиля от заданной траектории вследствие действия
внешних возмущений [10,11,12].
Криволинейное движение автомобиля характеризуется
изменением во времени положения его продольной и вертикальной осей, а также
наличием продольных и главным образом поперечных ускорений. Способность
автомобиля совершать криволинейное движение оценивается двумя свойствами:
управляемостью и устойчивостью.
Управляемость - свойство управляемого водителем
автомобиля сохранять в определенной дорожно-климатической обстановке заданное
направление движения или изменять его в соответствии с воздействием на рулевое
управление.
Устойчивость - свойство автомобиля, характеризующее
его способность сохранять заданное направление движения при воздействии внешних
сил, стремящихся отклонить его от этого направления. В экстремальных условиях
недостаточная устойчивость автомобиля может привести к его заносу и
опрокидыванию.
Принципиальное различие между понятиями управляемость
и устойчивость заключается в том, что устойчивость охватывает ряд свойств
автомобиля, обеспечивающих его движение по заданной траектории без воздействия
водителя, а управляемость - при его воздействии.
При движении автомобиль может иметь траекторные и
курсовые отклонения. Траекторное отклонение - это отклонение вектора скорости
автомобиля от заданного направления. Курсовое отклонение - отклонение
продольной оси автомобиля от направления траектории движения. В соответствии с
этим принято различать его траекторную и курсовую управляемость и устойчивость.
Криволинейное движение автомобиля может совершаться вследствие воздействия
водителя на рулевое управление или при фиксированных управляемых колесах. В
первом случае управляемость и устойчивость автомобиля условно считаются
динамическими свойствами, а во втором - статическими.
Устойчивость автомобиля по ориентации вертикальной оси
в продольной и поперечной плоскостях, зависит от продольной и поперечной
устойчивости.
Понятия управляемость и устойчивость автомобиля
взаимосвязаны, поскольку они определяются в основном одними и теми же
конструктивными параметрами автомобиля: компоновкой, особенностями рулевого
управления, характеристиками шин, параметрами подвесок. В то же время влияние
параметров автомобиля на его управляемость и устойчивость может быть различным.
Например, с увеличением момента инерции автомобиля относительно вертикальной
оси, проходящей через центр тяжести, улучшается устойчивость автомобиля при
прямолинейном движении и в то же время ухудшается управляемость: для изменения
направления движения к рулевому управлению необходимо приложить большие усилия.
Поэтому выбор параметров автомобиля, обеспечивающих наилучшие характеристики
устойчивости и управляемости, является задачей оптимизации [13,14,15].
Колесные транспортные средства могут поворачиваться за
счет:
) поворота управляемых колес;
) притормаживания неуправляемых колес одного борта
(поворот «по-гусеничному»);
) поворота звеньев машины относительно друг друга
(двухзвенные или многозвенные сочлененные машины).
Для автомобилей наиболее характерен первый способ.
Управляемые колеса при этом поворачиваются вокруг некоторых вертикальных осей
(шкворней).
На рисунке 1.1 изображена схема сил, действующих на
автомобиль с передними ведомыми управляемыми колесами при движении по круговой
траектории с постоянной малой скоростью (инерционные силы отсутствуют).
От
ведущих колес на раму автомобиля передаются силы тяги F и F
и F равнодействующая которых Fт в первом
приближении считается направленной вдоль продольной оси автомобиля. Эта сила
через раму автомобиля передается на передний мост. В точках контакта
управляемых колес с поверхностью дороги возникают реакции, равнодействующая
которых Rx1 также может считаться направленной вдоль продольной
оси автомобиля. Так как отсутствуют другие силы, равнодействующая Rx1
равна Fт.
равнодействующая которых Fт в первом
приближении считается направленной вдоль продольной оси автомобиля. Эта сила
через раму автомобиля передается на передний мост. В точках контакта
управляемых колес с поверхностью дороги возникают реакции, равнодействующая
которых Rx1 также может считаться направленной вдоль продольной
оси автомобиля. Так как отсутствуют другие силы, равнодействующая Rx1
равна Fт.
Реакция
Rx1 может быть разложена на две составляющие Ff и Ry1,
направленные соответственно вдоль и перпендикулярно к плоскости колес.
Составляющая
Ff определяется моментом сопротивления качению
Ff =M/r=f ×Rz.
Соответственно,
сила тяги на ведущем мосту при равномерном повороте автомобиля может быть
найдена по выражению:
Fт= Rx1= Ff /cos θ,
где
θ-
угол поворота управляемых колес.

Рисунок
1.1 Схема поворота автомобиля:
а
- с задними ведущими колесами; б - с передними
Из
рассмотрения суммы моментов относительно точки D, лежащей
посередине заднего моста, видно, что Ff создает момент сопротивления
повороту, a Ry1 - поворачивающий момент,
который при равномерном движении равен моменту сопротивления повороту:
Ry1×L×cos θ=
Ff
×L×sin θ.
Поскольку
значение Rx1 ограничено сцеплением (Rx1max=φ×Rz1), a Ry1= =Rx1×sin
θ, в предельном случае
φ×Rz1×cos θ= Mf /r0, (1.1)
где
Mf - момент сопротивления вращению колес, обусловленный
как сопротивлением качению, так и другими сопротивлениями.
Если
имеет место только сопротивление качению, условие (1.1) записывается в виде:
φ ≥ f /cos θ; φ×cos θ ≥ f . (1.2)
Из выражения (1.2) следует, что поворот автомобиля
будет осуществляться в том случае, если коэффициент сопротивления качению
управляемых колес будет меньше, чем произведение коэффициента сцепления на
косинус угла поворота управляемых колес. Если это условие не будет соблюдено,
управляемые колеса будут двигаться юзом и поворот автомобиля не произойдет.
Максимальные углы поворота управляемых колес
автомобилей обычно не превышают 35...45°. Коэффициент сцепления на твердой и
сухой дороге во много раз превышает коэффициент сопротивления качению. Поэтому
управляемость автомобиля в указанных дорожных условиях обеспечивается всегда.
Однако на мягких и скользких поверхностях различие в коэффициентах φ и f значительно уменьшается, вследствие чего управляемость
автомобиля ухудшается. Это же происходит и при торможении автомобиля: тормозная
сила суммируется с силой сопротивления качению колес. При интенсивном
торможении, когда полностью используются сцепные свойства дороги, поворот
автомобиля становится невозможным [13].
На рисунке 1.1 б показана схема сил при повороте
автомобиля с передними ведущими и управляемыми колесами. В данном случае
поворачивающий момент создается не боковой реакцией, как это имело место в
случае с ведомыми управляемыми колесами, а силой тяги: Мп= Fт ×L×sin
θ. Поэтому у
автомобилей с передними ведущими и управляемыми колесами этот момент всегда
будет создаваться, если ведущие колеса создают силу тяги. Этим и объясняется,
что такие автомобили обладают лучшей управляемостью, чем автомобили с
управляемыми ведомыми колесами, особенно при движении по скользким дорожным
поверхностям, когда боковые реакции дороги ограничиваются сцеплением.
.2 Увод автомобильного колеса
Автомобильное колесо обладает радиальной,
тангенциальной и боковой эластичностью. Управляемость и устойчивость автомобиля
в значительной степени зависят от боковой эластичности автомобильного колеса.
Если на катящееся, жесткое в боковом направлении
колесо действует боковая сила, траектория качения колеса будет оставаться в его
продольной плоскости до тех пор, пока боковая сила не станет больше силы
сцепления колеса с дорогой. После этого начинается скольжение колеса в боковом
направлении. При действии же боковой силы на катящееся эластичное колесо
траектория качения колеса отклонится от плоскости колеса на угол, называемый
углом бокового увода. Сущность происходящих процессов поясним на схеме,
изображенной на рисунке 1.2.
На рисунке 1.2, а показана схема качения эластичного
колеса, когда боковые силы отсутствуют. Линия ОА проходит посередине
протектора. При качении колеса его точки В и С, находящиеся на этой линии,
касаются дороги соответственно в точках В1 и С1, и траектория качения колеса
будет располагаться в плоскости симметрии колеса. При действии на колесо
боковой силы Fy вертикальная плоскость, проходящая
через центр колеса, сместится относительно центра отпечатка на Δ
(рисунок 1.2, б), а
линия ОА, проходящая посередине протектора, будет изогнутой. Вследствие этого
при повороте колеса на некоторый угол точка В войдет в контакт с дорогой в
точке В2, а точка С - в С2. При дальнейшем качении колеса все точки, лежащие на
середине протектора, будут иметь контакт с дорогой на линии ОК, и траектория
колеса (линия ОК) отклонится от плоскости колеса на угол δ.
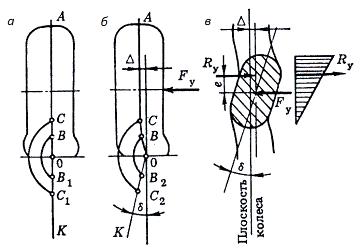
Рисунок 1.2 Схема качения эластичного колеса с уводом
Деформация элементов шины в боковом направлении по
длине контакта разная: впереди элементы шины деформированы в боковом
направлении меньше, чем в задней части, так как входящие в контакт с дорогой
элементы шины в начальный момент практически не воспринимают боковые реакции.
По мере поворота колеса эти точки перемещаются к задней части отпечатка. При
этом увеличивается деформация элементов шины и, соответственно, возрастает доля
боковой силы, воспринимаемой этими элементами. Вследствие этого продольная ось
площадки, по которой шина контактирует с опорной поверхностью, оказывается
повернутой относительно продольной плоскости колеса на некоторый угол (рисунке
1.2, в). Так как боковая деформация элементов, находящихся в задней части
контакта, больше, чем в передней, эпюра боковых давлений будет треугольной
формы. Это приводит к тому, что равнодействующая Ry элементарных поперечных реакций, равная силе Fy, оказывается смещенной от центра
отпечатка назад на расстояние е. В результате этого создается момент Mс= е ×Ry, стремящийся повернуть колесо в
сторону действия боковой силы Fy,
называемый стабилизирующим моментом.
Результаты исследований, проведенных в различных
странах, позволили установить, что угол увода колеса для определенного
состояния шины является функцией боковой силы. В общем случае зависимость между
углами увода и боковыми силами нелинейная.
На рисунке 1.3 показана характерная зависимость угла
увода от боковой силы. На этой зависимости можно отметить три характерных
участка: 0-1 - угол увода зависит линейно от боковой силы; 2-3 - угол увода
неограниченно возрастает без увеличения боковой силы; участок 1-2 - переходной.
На участке 0-1 увод автомобильного колеса происходит
только за счет упругой деформации элементов шины. По мере увеличения боковой
силы элементы шины, расположенные в задней части контакта и являющиеся наиболее
нагруженными в боковом направлении, начинают проскальзывать.

Рисунок 1.3 Зависимость угла увода от боковой силы
Это приводит к нарушению пропорциональной зависимости
между боковой силой и углом увода (участок 1 - 2). При дальнейшем увеличении
боковой силы начинается полное скольжение шины в боковом направлении (участок 2
- 3).
Отношение боковой силы к углу увода, определенное на
линейном участке (0 - 1), называется коэффициентом сопротивления уводу колеса ky:
kу = Fy /δ. (1.3)
Коэффициент сопротивления уводу зависит от ряда
факторов, основными из которых являются: размеры и конструкция колеса, давление
воздуха в шине, тип и состояние дорожного покрытия, нормальная нагрузка колеса
и его окружная сила.
Значения коэффициента ky у шин легковых автомобилей составляют 15...40 кН/рад, а у
шин грузовых автомобилей и автобусов 60...120 кН/рад.
Коэффициенты сопротивления боковому уводу находят
экспериментально путем испытания шин на стендах или определением углов увода
осей автомобилей в процессе их движения. На рисунке 1.4 показана принципиальная
схема стенда для определения зависимости боковой силы от углов увода колеса.
Испытываемое колесо 1 устанавливается на барабан стенда 2 так, что его ось и
ось стенда располагаются под углом δ. При вращении барабана и колеса этот
угол соответствует углу увода, поскольку траектория движения колеса
относительно барабана лежит в плоскости барабана, а плоскость колеса повернута
к плоскости барабана под углом δ.
В процессе испытаний замеряют боковую силу Fy, действующую на колесо, и угол δ.
По этим данным строят
зависимости Fy= f (δ), аналогичные показанным на рисунке
1.3. На стендах колесо может испытываться в ведущем, ведомом, нейтральном и
тормозном режиме в зависимости от того, какой из электрических двигателей
(двигатель барабана 3 или колеса 4) является ведущим. Нагружение колеса
обеспечивается грузом 5. Коэффициенты сопротивления уводу, получаемые при
испытаниях на таком стенде, вследствие кривизны контактной площадки имеют
обычно несколько меньшее значение, чем получаемые при испытаниях на плоских
поверхностях.
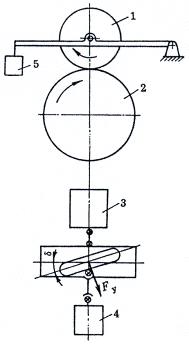
Рисунок 1.4 Принципиальная схема определения
характеристик увода шин на стенде
Ориентировочные значения коэффициентов сопротивления
уводу для шин с диагональным расположением нитей корда могут быть определены по
эмпирической формуле, полученной в НИЦИАМТ:
kу =500×B0×(D0+2×B0×pв+1),
где B0, D0 - ширина и диаметр обода колеса, м;
рв - давление воздуха в шине, МПа.
Устойчивость и управляемость автомобиля в значительной
степени зависят от углов увода мостов, которые определяются уводом шин и
кинематикой подвески. Обычно углы увода мостов определяют экспериментально при
движении автомобиля с различными скоростями по кругу с закрепленным рулевым
колесом. Угол увода моста фиксируется с помощью «пятого колеса» специальной
конструкции (рисунок 1.5). «Пятое колесо» крепится по оси симметрии автомобиля
так, чтобы точка его контакта с дорогой находилась под задним мостом автомобиля
(под осью тележки у трехосного автомобиля). При движении по кругу «пятое
колесо» катится без бокового увода, поскольку инерционные силы, действующие на
него, уравновешиваются противовесом. Поэтому угол между продольной осью
автомобиля и плоскостью, в которой расположено «пятое колесо», является углом
увода. При этом виде испытаний боковыми являются центробежные силы, которые
находятся расчетом по параметрам движения автомобиля или непосредственно
замеряются датчиками ускорений.
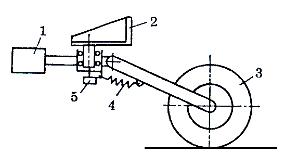
Рисунок 1.5 Прибор «пятое колесо» для определения угла
увода мостов: 1 - противовес; 2 - кронштейн крепления колеса; 3 - колесо; 4 -
прижимная пружина; 5 - потенциометр
.3 Поворот автомобиля с эластичными колесами
При движении автомобиля с жесткими колесами, центр его
поворота определяется точкой 00 (рисунок 1.6) пересечения прямых, являющихся
продолжением осей всех колес, а расстояние от этой точки до продольной
плоскости симметрии автомобиля определяет радиус поворота
R0=L/tg θ (1.4)
где θ - средний угол поворота управляемых
колес
В действительности при повороте автомобиля с
эластичными колесами под действием центробежной силы возникает увод каждого
колеса, что приводит к смещению центра поворота. Центр поворота в этом случае
будет лежать на пересечении перпендикуляров, восстановленных из середины
переднего и заднего мостов к направлениям их движения. Радиус поворота
автомобиля в этом случае можно определить из следующих геометрических
соотношений
BD/OD= tg δ2; AD/OD= tg (θ - δ1);=AD+BD= OD×tg (θ - δ1)+OD×tg δ2;=R=L/(tg δ2+ tg (θ - δ1))≈ L/(θ + δ2 - δ1), (1.5)
где δ2 и δ1 - углы увода задних и передних
колес.
Из уравнения (1.5) следует, что из-за бокового увода
колес действительный радиус R
поворота отличается от радиуса R0 и
что он при постоянном значении угла θ во многом зависит от соотношения
углов увода передней δ1 и задней δ2 осей.
В зависимости от соотношения углов увода δ1 и δ2 различают автомобили с нейтральной,
недостаточной и избыточной поворачиваемостью.
У автомобилей с нейтральной поворачиваемостью, углы
увода δ1= δ2 и радиус поворота согласно
выражению (1.4)
R≈L/θ
= R0,
т.е. он приблизительно равен радиусу поворота
автомобиля с эластичными колесами.
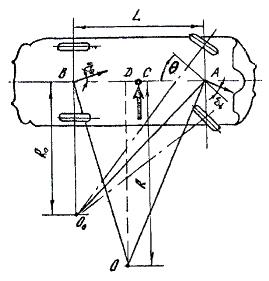
Рисунок 1.6 Схема поворота автомобиля с эластичными
колесами
Автомобили с недостаточной поворачиваемостью имеют
угол увода δ1>δ2. Следовательно, радиус поворота таких автомобилей с
эластичными колесами R>R0, так как
R ≈ L/(θ
+ δ2
- δ1) >L/θ.
Автомобили c излишней поворачиваемостью имеют угол увода
δ1 < δ2 и радиус поворота R<R0, так как
R ≈ L/(θ
+ δ2
- δ1) <L/θ.
Способность сохранять заданное прямолинейное движение
у автомобилей с нейтральной и избыточной поворачиваемостью при воздействии на
них боковой силы различна. Если к автомобилю, обладавшему свойством излишней
поворачиваемостью и движущемуся прямолинейно, приложить боковую силу Fб
(например, составляющую силы тяжести автомобиля), то из-за бокового увода
характер его движения изменится. Автомобиль начнет двигаться по окружности с
центром, расположенным в точке О (рисунок 1.7, a). Но как только прямолинейное
движение перейдет в криволинейное, возникает центробежная сила Fц , которая
будет направлена в ту же сторону, что и боковая сила Fб. Это еще увеличит углы
увода, уменьшит радиус поворота, а следовательно, увеличит центробежную силу,
что снова приведет к увеличению углов увода и т. д. Если при этом водитель не
изменит положения управляемых колес для увеличения радиуса поворота, то может
начаться занос автомобиля.
Рисунок 1.7 Схема движения автомобилей с излишней (а)
и недостаточной (б) поворачиваемостью при действии боковой силы
При действии боковой силы на автомобиль, обладающий
свойством недостаточной поворачиваемости, он также из-за увода колес, начнет
двигаться по окружности (рисунок 1.7, б). Возникающая при этом центробежная
сила Fц будет направлена противоположно
действующей силе Fб что приведет к
уменьшению углов увода и выравниванию направления движения автомобиля.
При повороте автомобиля наличие увода колес также
изменяет характер его движения. В этом случае боковой силой, вызывающей увод
колес, будет центробежная сила
Fц =G×v2/(g×R).
Она распределится по осям обратно пропорционально
расстояниям этих осей от центра тяжести автомобиля. Каждому значению боковой
силы соответствуют определенные углы увода передней и задней осей, а
следовательно, и разность этих углов, т.е. δ2 - δ1=f (Fц). Радиус
поворота R= L/(θ + δ2 - δ1).
Движение автомобиля на повороте характеризуется вполне
определенными соотношениями (связями) между величинами R, θ, v, Fц,
δ2
- δ1. Если две из
этих величин заданы, то остальные три будут иметь строго конкретные значения.
Скорость, луч которой совпадает с направлением
прямолинейного участка зависимости Fц /G =f (δ2 - δ1) (получила название критической по
управляемости), делит все поле графика на две части. В первой, расположенной
под лучом этой скорости, движение автомобиля возможно, во второй - нет.
Даже при движении по прямой при этой критической
скорости (точка начала координат) возможен такой случай, когда внезапно
возникающая боковая сила (порыв ветра, наклон дороги и т. д.) вызывает потерю
управляемости.
Физический смысл явления объясняется тем, что при
кратковременном действии боковой силы из-за увода колес автомобиль начинает
двигаться по кривой. Возникающая боковая сила вызывает уменьшение радиуса
поворота, дальнейшее увеличение центробежной силы и т. д. до тех пор, пока
автомобиль полностью потеряет управляемость.
Величину критической скорости можно определить
аналитически, рассмотрев случай прямолинейного движения автомобиля и момента
когда, это движение нарушено кратковременной боковой силой. Управляемые колеса
находятся в нейтральном положении, т. е. θ =0, следовательно, радиус поворота в
данном случае R= L/(θ + δ2 - δ1) ≈ L/(δ2 - δ1).
Величина центробежной силы, возникающей при
криволинейном движении автомобиля с критической скоростью,
Fц =G×v /(g×R).
/(g×R).
Подставляя
в это выражение значение радиуса поворота, получим
Fц =G×v/(g×L)×(δ2 - δ1).
отсюда
критическая скорость движения:
vкр= .
.
Углы
увода δ2 и δ1 могут
быть определены по формулам:
δ1= Fц1 / kу1= Fц×b /(L×kу1); δ2= Fц2 / kу2= Fц×a /(L×kу2),
где
Fц1 и Fц2 - составляющие центробежной силы, приходящиеся
соответственно на передние и задние колеса автомобиля;
а
и b - расстояния от передней и задней осей до центра
тяжести автомобиля;
kу1 и kу2 -
коэффициенты сопротивления уводу передней и задней осей.
Подставляя
значения углов увода δ1 и δ2 в
выражение для критической скорости, после незначительных преобразований получим
vкр= , (1.6)
, (1.6)
где
G1 и G2 - составляющие веса автомобиля, приходящиеся
соответственно на переднюю и заднюю оси.
Критической
скоростью автомобиля называется такая, при которой автомобиль под влиянием
любой, сколь угодно малой боковой силы при не повернутых управляемых колесах
начинает двигаться по кривой все уменьшающегося радиуса (по опирали), что приводит
к потере управляемости.
Анализ
выражения, полученного для критической скорости, позволяет установить
следующее.
Увеличение
базы автомобиля увеличивает его критическую скорость.
Критическая
скорость изменяется в зависимости от распределения веса автомобиля по осям и
соотношения коэффициентов сопротивления уводу передней и задней осей. При этом
имеют место три возможных случая.
Во-первых,
G2 / kу2 = G1 / kу1 → vкр=∞, т.е. в этом случае
критическая скорость получается весьма большой и в реальных условиях работы
автомобиля невозможна.
Во-вторых,
G2 / kу2 < G1 / kу1. Подсчет по формуле (1.6) приводит к получению
мнимой величины, т. е. при этом условии (недостаточная поворачиваемость)
критическая скорость невозможна вообще.
В-третьих,
G2 / kу2 > G1 / kу1. Критическая скорость может иметь определенное
значение, при котором достаточно появления сколь угодно малой силы, чтобы
автомобиль потерял управляемость.
Таким
образом, для получения хорошей управляемости автомобиля нужно, его
проектировать так, чтобы было выдержано первое или второе условие.
2.
Управляемость автомобиля и безопасность движения
.1 Значение управляемости автомобиля для безопасного движения
Управляемость оценивают по соответствию параметров движения автомобиля
воздействием водителя на рулевое управление. При различных воздействиях степень
соответствия может быть различной, что затрудняет выбор единого критерия для
комплексной оценки управляемости автомобиля в эксплуатационных условиях.
Поворачивая рулевое колесо, водитель задает новое
направление движения автомобиля. При плохой управляемости автомобиля
действительное направление движения не совпадает с желательным и необходимы
дополнительные управляющие воздействия со стороны водителя. Это приводит к
«рысканию» автомобиля по дороге, увеличению динамического коридора и утомлению
водителя. При особенно неблагоприятных условиях плохая управляемость может
явиться причиной столкновения автомобилей, наезда на пешехода или выезда за
пределы дороги.
Подавляющее большинство опасных дорожных ситуаций (до
80...85%) водитель ликвидирует путем своевременного поворота рулевого колеса и
изменения направления движения автомобиля. При этом водитель может, либо,
повернув автомобиль, отвести его от опасной зоны под углом к прежнему
направлению движения, либо выехать в соседний ряд. Первый маневр проще, но его
выполнению может помешать недостаточная ширина проезжей части, деревья, столбы
и другие препятствия, находящиеся за пределами дороги. Второй маневр можно
выполнить на любой двухполосной дороге.
Определим параметры движения автомобиля при первом
маневре, считая шины жесткими в боковом направлении. Это позволит ограничиться
простыми кинематическими зависимостями.
В положении Ι (рисунок 2.1) водитель замечает
впереди на расстоянии S2
препятствие. На пути Sp (за
время tp) он осознает необходимость маневра и
принимает решение о его выполнении. На пути Sр.у (за время tр.у)
водитель поворачивает рулевое колесо, но автомобиль продолжает двигаться
прямолинейно, так как происходит деформация амортизационных пружин, рычагов и
тяг рулевого управления и положение передних колес не меняется (положение II). Время tp.y - время
запаздывания рулевого управления - составляет в среднем 0,15…0,35 с. В
положении III автомобиль начинает двигаться
криволинейно. При этом водитель поворачивает колеса вначале в одну сторону, и
угол θ увеличивается (время Т1). В опасных
ситуациях после поворота колес на угол θ1 водитель сразу поворачивает их
обратно, вследствие чего угол θ уменьшается (время Т2). В положении IV θ=0, и автомобиль движется прямолинейно
под углом γм к прежнему направлению движения. Безопасность поворота
будет обеспечена, если в конце маневра между автомобилем и препятствием
останется некоторый интервал Δ. Согласно рисунку 2.1,а можно
написать:
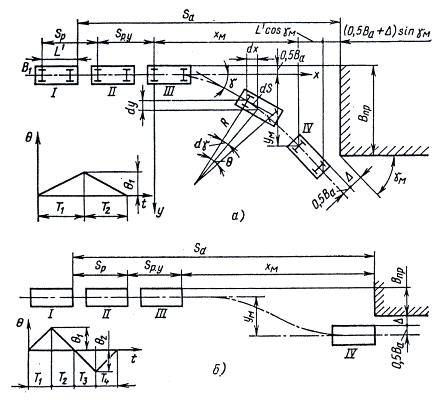
Рисунок 2.1 Схемы для расчета маневра автомобиля:
а - при неограниченной ширине препятствий; б - при
смене полосы движения
Sa = Sp - L' + Sp.у + xм + L' ×cos γм + (0,5×Ba +Δ)×sin γм;
yм + 0,5×Ba+ L'×sin γм = Bпp + (0,5×Ba + Δ)×cos γм,
где L' -
расстояние от заднего моста до передней части автомобиля;
xм и yм -
продольное и поперечное перемещения автомобиля в процессе маневра;
Bпр - ширина препятствия.
Приняв приближенно sin γм ≈ γм и cos γм = 1. получим условия безопасного
маневра:
xм ≤ Sa - Sp - Sp.y + (0,5×Ba+Δ) γм ;
yм ≥ Впр +Δ - L× γм.
Чтобы определить параметры криволинейного движения,
проведем оси координат х и у так, чтобы начало системы координат совпадало с
серединой заднего моста автомобиля в положении III. В некоторый момент времени t автомобиль, двигаясь криволинейно, повернется относительно
оси х на угол γ. После поворота его еще на бесконечно малый угол dγ середина заднего моста опишет дугу dS = R×dγ. При движении автомобиля с
постоянной скоростью v
длина дуги dS = v×dt. Учитывая равенство (1.4), имеем:
dγ = dS/R - v×dt/R = v×θ×dt/L.
Закон
изменения угла γ по
времени зависит от водителя и может быть различным. Примем для простоты, что
угловая скорость поворота передних колес постоянна ( =const) и в первой фазе поворота (время Т1) угол θ изменяется прямо пропорционально времени:
=const) и в первой фазе поворота (время Т1) угол θ изменяется прямо пропорционально времени:
θ = ×t.
При
этом допущении курсовой угол прямо пропорционален квадрату времени:
γ= v××∫ t×dt/L= v××t2 /(2×L).
(2.1)
В
эксплуатационных условиях максимальное значение курсового угла обычно не
превышает 10...15°. Для таких значений γ изменение координат х и у точки B1 за
время dt определяется формулами:
dx=dS×cos γ
≈ dx; dy=
dS×sin γ
≈dS×γ =v×dt×γ.
Следовательно, координаты точки В1, в момент времени t имеют следующие значения:
x=∫
v×dt =
v×t;
(2.2)
y=(v2××∫ t2×dt) /(2×L)= v2××t3/(6×L) (2.3)
Формулы (2.1) - (2.3) позволяют найти γ, х и у и определить положение
автомобиля на дороге в процессе входа в поворот.
Величина
угловой скорости ограничена, с одной стороны, психофизиологическими
возможностями водителя и находится в следующих пределах, рад/с:
Для легковых
автомобилей............................................................0,2 -
0,3
Для грузовых автомобилей и
автобусов.....................................0,15 - 0,3
С
другой стороны, скорость не может быть особенно большой по соображениям
безопасности. Выполняя маневр, водитель должен избегать заноса или опрокидывания.
Потеря
устойчивости автомобилем наиболее вероятна в середине маневра (при θ = θ1), где
кривизна траектории максимальна. Из условия равенства центробежной силы и силы
сцепления на этом участке имеем
M×v2/R= M×v2/L×θ1=G×v2/g×L××T1=G×φy. (2.4)
Отсюда
максимально допустимая угловая скорость поворота передних колес по условиям
сцепления:
= L×G×φy /( v2×T1).
Подставив
значение в формулы (2.1) и (2.2), получим выражения для
определения параметров γ1, х1 и у1 в середине маневра (таблица 2.1). Проведя
аналогичные вычисления для второй фазы маневра - выхода автомобиля из поворота,
получим формулы для параметров γм, хм и ум конца второй фазы - выхода автомобиля из поворота.
Таблица
2.1
Параметры
движения автомобиля при маневрах
|
Маневр
|
γ
|
x
|
y
|
|
Вход в поворот
|
γ1=g×φy×T1/(2×v)
|
x1=v×T1
|
y1=
g×φy×T /6= =g×φy×x/(6×v2) /6= =g×φy×x/(6×v2)
|
|
Выход из поворота
|
γ2=g×φy×T1/v=2×γ1
|
x2=2×v×T1=2×x1
|
y2=g×φy× T=6×y1
|
Смена
полосы движения γм=0 xм=4×v×T1 yм=2× g×φy× T=
|
=g×φy×x /(8×v2) /(8×v2)
|
Выполняя маневр второго типа - смену полосы движения,
водитель должен повернуть рулевое колесо несколько раз (рисунок 2.1, б),
Сначала он поворачивает его на угол θ1 в одну сторону, затем на угол,
равный 2×θ1 в другую сторону и, наконец,
возвращает колеса в нейтральное положение. Весь маневр, состоящий в этом случае
из четырех периодов Т1 - Т4, требует от водителя точного расчета и большего
числа действий на том же пути, чем при маневре первого типа. Зато при
выполнении маневра второго типа автомобиль меньше смещается в поперечном
направлении, и проезжая часть дороги может быть значительно уже. В конце
маневра курсовой угол равен нулю и автомобиль движется параллельно прежнему
направлению движения.
Формулы для расчета параметров маневра второго типа
также даны в таблицу 2.1.
Изложенный выше анализ маневра проведен для
элементарной расчетной схемы, в которой не учитываются многие конструктивные и
эксплуатационные факторы. Параметры движения реального автомобиля могут
значительно отличаться от расчетных данных, поэтому последние обычно используют
лишь для сравнения различных вариантов маневра.
.2 Поворачиваемость автомобиля
Поворачиваемостью называют свойство автомобиля изменять
направление движения без поворота управляемых колес. Есть две основных причины
поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и
поперечный крен кузова, связанный с эластичностью подвески. Соответственно
различают шинную и креновую поворачиваемость автомобиля.
Уводом называют качение колеса под углом к своей
плоскости. При действии на колесо с эластичной шиной поперечной силы Ру вектор
скорости центра колеса отклоняется от плоскости вращения на некоторый угол δ
- угол увода. Сила Ру и
угол увода δ связаны следующей зависимостью:
Pу = kу×δ, (2.5)
где kу -
коэффициент сопротивления уводу (первая производная от поперечной силы по углу
увода), Н/рад.
Величина kу зависит от многих факторов, из которых наибольшее значение имеют величина
угла увода, вертикальная и касательная силы, приложенные к колесу, и наклон
колеса к вертикали. Считая, что эти факторы действуют независимо один от
другого, их влияние на kу
учитывают экспериментальными поправочными коэффициентами. С учетом этих коэффициентов
формула (2.5) принимает следующий вид:
Ру=q1×q2×q3×q4× kу max×δ,
где q1 и q2 - коэффициенты, учитывающие
изменение вертикальной и касательной сил, действующих на колесо;
q3 - коэффициент, учитывающий изменение угла наклона колеса;
q4 - коэффициент, учитывающий влияние угла δ
и характера опорной
поверхности;
kу max - максимальный
коэффициент сопротивления уводу при изменении вертикальной нагрузки и малых
величинах δ.
Экспериментальные зависимости угла δ
от Ру для некоторых шин
показаны на рисунке 2.2. Эти зависимости имеют сложный характер, однако при
малых углах увода их можно приближенно считать линейными, а коэффициент kу постоянным.
При наличии увода центр поворота автомобиля находится
не в точке О, как у автомобиля с жесткими шинами (рисунок 2.3, а в точке О1, т.
е. в месте пересечения перпендикуляров к векторам скоростей v1 и v2.
Для автомобиля с жесткими шинами δ1 = δ2 = 0 и для радиуса получаем формулу
(1.4).
Таким образом, траектория движения автомобиля с
жесткими шинами зависит только от угла θ. У автомобиля c эластичными шинами на нее влияют
углы увода, которые в свою очередь зависят от θ, v и других факторов. При наличии увода
автомобиль может двигаться криволинейно, даже при θ
= 0. Кривизна траектории
зависит от соотношения углов δ1 и δ2. Если δ1= δ2, то шинную поворачиваемость
автомобиля называют нейтральной.

Рисунок 2.2 Зависимости угла увода δ
от поперечной силы Ру
для автомобилей с различными шинами
Рисунок 2.3 Схема движения автомобиля с эластичными
шинами
Хотя при этом согласно формуле (1.4) Rэ = R, но траектория движения автомобиля c жесткими шинами не совпадает с траекторией движения
автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в
этих случаях занимают различные положения.
В случае действия поперечной силы на автомобиль,
имеющий жесткие шины, он сохраняет прежнее направление движения, пока эта сила
по величине не станет равной силе сцепления. Автомобиль, имеющий нейтральную
шинную поворачиваемость, под действием поперечной силы движется под углом δу к прежнему направлению движения.
Если δ1 > δ2, то Rэ > R, и
для движения автомобиля с эластичными шинами по кривой радиусом Rэ управляемые колеса нужно повернуть
на больший угол, чем при жестких шинах. В этом случае шинную поворачиваемость
автомобиля называют недостаточной. Под действием поперечной силы Ру (рисунок
2.4, а) при прямолинейном движении передняя ось автомобиля с недостаточной
поворачиваемостью в результате увода, движется под углом δ1 к прежнему направлению движения, а
задний мост - под углом δ2. Автомобиль поворачивается вокруг центра О1,
вследствие чего возникает центробежная сила Рц, поперечная составляющая Рцу
которой направлена в сторону, противоположную силе Ру, что уменьшает
результирующую поперечную силу и увод колес. Следовательно, автомобиль с
недостаточной шинной поворачиваемостью устойчиво сохраняет прямолинейное
направление движения.
Рисунок 2.4 Схемы движения автомобиля с различной
шинной поворачиваемостью:
а - с недостаточной; б - с излишней
Если угол δ1<δ3, то Rэ<R, и
для движения автомобиля с эластичными шинами по кривой радиусом R управляемые колеса нужно повернуть
на меньший угол, чем при жестких шинах. В этом случае шинную поворачиваемость
автомобиля называют излишней. Если на автомобиль с излишней поворачиваемостью
действует центробежная сила Рц, то он тоже движется криволинейно (рисунок 2.4,
б). Однако составляющая Pцу в
этом случае направлена в ту же сторону, что и сила Ру. В результате увод
возрастает, что увеличивает кривизну траектории и силу Pцу и т. д. Если водитель не повернет управляемые колеса в
нужном направлении, то центробежная сила Рц может возрасти настолько, что
автомобиль потеряет устойчивость. Таким образом, автомобиль с недостаточной
поворачиваемостью более устойчив и лучше сохраняет направление движения, чем
автомобиль с излишней поворачиваемостью.
Для количественной оценки шинной поворачиваемости
автомобиля служит коэффициент поворачиваемости:
ηпов=(G2/kу2)/(G1/kу1)= G2×kу1/ (G1×kу2),
где kу1 и kу2 - коэффициенты сопротивления уводу
переднего и заднего мостов автомобиля.
При излишней шинной поворачиваемости автомобиля ηпов>1,при нейтральной ηпов = 1, а при недостаточной ηпов < 1. Значения ηпов для некоторых отечественных
автомобилей приведены в таблице 2.2, свидетельствующей о том, что большинство
автомобилей имеют недостаточную шинную поворачиваемость в ненагруженном
состоянии. При полной нагрузке, напротив, автомобили имеют излишнюю
поворачиваемость. Показатель ηпов является приближенным, так как в
процессе движения автомобиля коэффициент kу меняется в широких пределах.
Таблица 2.2
Коэффициенты шинной поворачиваемости
|
Автомобиль
|
без нагрузки
|
с полной нагрузкой
|
Автомобиль
|
без нагрузки
|
с полной нагрузкой
|
|
ЗАЗ-969 «Запорожец»
|
1,36
|
1,15
|
ГАЗ-14 «Чайка»
|
0,85
|
1,08
|
|
|
|
ЗИЛ-118
|
0,96
|
1,10
|
|
ВАЗ-2109 «Жигули»
|
0,84
|
1,10
|
УАЗ-452
|
0,78
|
1,38
|
|
|
|
ГАЗ-4509
|
0.61
|
1,26
|
|
«Москвич-2140»
|
0,87
|
1,17
|
ЗИЛ-4331
|
0,51
|
1,35
|
|
ГАЗ-31105
|
0,89
|
1,10
|
МАЗ-5336
|
0,43
|
1,04
|
Креновая поворачиваемость автомобиля связана с
конструкцией его подвески. На рисунке 2.5 показан задний мост с рессорной
подвеской автомобиля, который совершает правый поворот. Передние концы рессор
соединены с кузовом простым шарниром, а задние - с помощью серьги. При прогибах
рессоры задний мост перемещается по дуге mm, причем ось его качания расположена около шарнира. Под
действием поперечной силы Рку кузов автомобиля наклоняется, вызывая сжатие
левых рессор и распрямление правых. Левая рессора, сжимаясь, перемещает задний
мост назад (в точку А), а правая, распрямляясь, перемещает его вперед (в точку
В). В результате задний мост поворачивается в горизонтальной плоскости, как
показано штриховой линией.
Если углы поворота переднего и заднего мостов не
одинаковы по величине или направлению, то автомобиль вследствие крена
поворачивается, хотя передние колеса остаются в нейтральном положении. Так, при
действии одной и той же возмущающей силы Ру автомобиль А (рисунок 2.6)
повернется вправо, а автомобиль Б - влево.
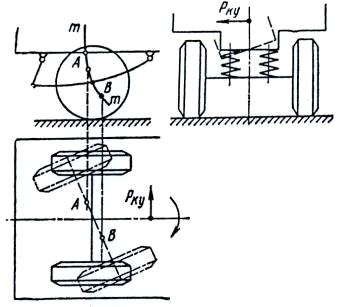
Рисунок 2.5 Поворот заднего моста при крене кузова
Возникающая при повороте центробежная сила Рц у
автомобиля А направлена в противоположную сторону по сравнению с возмущающей
силой Ру, а у автомобиля Б в ту же сторону. Поэтому автомобиль А лучше
сохраняет направление движения под действием поперечных возмущающих сил.

Рисунок 2.6 Схемы движения автомобилей с зависимой
рессорой подвеской, имеющих различную креновую поворачиваемость
По аналогии с шинной поворачиваемостью можно сказать,
что автомобиль А имеет недостаточную, а автомобиль Б излишнюю креновую
поворачиваемость.
У автомобиля с излишней креновой поворачиваемостью, на
который действует поперечная сила, кривизна траектории непрерывно увеличивается.
Это приводит к росту центробежной силы и дальнейшему уменьшению радиуса
поворота. Однако максимальное значение угла поперечного крена обычно ограничено
упорами, предусмотренными в конструкции подвески. Поэтому креновая
поворачиваемость не может увеличиваться беспредельно.
Креновая поворачиваемость автомобиля тесно связана с
шинной поворачиваемостью, так как увод колеса возникает не только под действием
сил и моментов, но и при наклоне колеса к вертикали (развале). Если направление
поперечной силы совпадает с направлением развала колеса, то увод возрастает.
Развал колеса, равный 1°, вызывает увод на угол 10...20'. У автомобилей с
независимой подвеской колес на поперечных рычагах крен кузова вызывает
изменение развала колеса. При двухрычажной подвеске (рисунок 2.7) колеса
наклоняются в сторону крена кузова в направлении действия поперечной силы Ру,
что увеличивает угол увода моста. При однорычажной подвеске (рисунок 2.7,б)
колеса наклоняются в сторону, противоположную крену кузова, навстречу поперечной
силе. В этом случае угол увода моста уменьшается. Таким образом, в зависимости
от конструкции подвески, креновая поворачиваемость может либо усиливать, либо
ослаблять влияние шинной поворачиваемости.
Рисунок 2.7 Схемы движения автомобилей с независимой
рычажной подвеской, имеющих различную креновую поворачиваемость
автомобиль управляемость безопасность
эксплуатационный
Для обеспечения недостаточной поворачиваемости
автомобиля необходимо, чтобы угол увода переднего моста был больше угла увода
заднего моста. Поэтому у легковых автомобилей наиболее распространена передняя
независимая подвеска на двух рычагах. Заднюю подвеску выполняют зависимой или
же независимой на одном поперечном рычаге. Никогда не применяют однорычажную
подвеску для переднего моста и двухрычажную для заднего, так как это приводит к
резкому ухудшению управляемости автомобиля.
Вследствие большого числа факторов, влияющих на
управляемость, фактическая траектория автомобиля может существенно отличаться от
расчетной. Так, например, при смене полосы движения расстояние хм, необходимое
для смещения автомобиля в поперечном направлении на величину ум, больше, чем
определенное по формуле, приведенной в таблице 2.1. Расхождение расчетных и
экспериментальных значений зависит от скорости автомобиля, сцепления шин с
дорогой и других причин. Поскольку расчет траектории с учетом всех факторов
трудоемок, то в практике поперечное смещение автомобиля определяют, считая шины
жесткими, а расстояние хм уточняют, применяя поправочный коэффициент kм. Этот коэффициент показывает, во
сколько раз фактический путь маневра хф больше расчетного:
kм =хф/хм > 1.
Коэффициент маневра определяют по эмпирическим
формулам:
ü для сухого
асфальтобетона……………….......kм =1,12
+ 0,005×v
ü для мокрого…………………………….…..…..kм =1,05 + 0,005×v
ü для гололеда……………….….kм =1,0 +
0,0033×v
В [15] была получена формула, определяющая
максимальную скорость vск1
автомобиля без поперечного скольжения передних колес. Эту скорость называют
критической по условиям управляемости. Если действительная скорость автомобиля
превысит критическую, то, как установлено выше, заноса не произойдет, однако
автомобиль частично утратит управляемость. При постоянной скорости водитель
поворотом рулевого колеса не сможет уменьшить радиуса кривой. При увеличении
скорости автомобиля и неизменном положении передних колес радиус кривой
автоматически возрастает вследствие поперечного проскальзывания шин по дороге.
Критическая скорость автомобиля по управляемости уменьшается при снижении коэффициента
сцепления. Поэтому потеря управляемости наиболее вероятна в случае движения
автомобиля по мокрым и скользким покрытиям.
Автомобиль может также утратить управляемость
вследствие увода шин. Чтобы объяснить это положение, определим из формулы (1.5)
угол поворота управляемых колес (в рад):
θ=(L/Rэ) - (δ2 - δ1). (2.7)
Углы увода δ1 и δ2 пропорциональны поперечным силам
Ру1 и Pу2, которые в свою очередь
пропорциональны квадрату скорости:
δ1=Ру1/kу1=М1×v2/(Rэ×kу1); (2.8)
δ2=Ру2/kу2=М2×v2/(Rэ×kу2). (2.9)
где kу1 и kу2 - коэффициенты сопротивления уводу
соответственно переднего и заднего мостов, Н/рад;
M1 и М2 - массы, отнесенные соответственно к переднему и
заднему мостам, кг.
При повышении скорости автомобиля углы увода также
возрастают. При этом у автомобиля с излишней шинной поворачиваемостью угол δ2 увеличивается быстрее угла δ1. Вследствие этого правая часть
выражения (2.7) уменьшается и при некоторой так называемой критической скорости
vув оказывается равной нулю. При этой
скорости автомобиль начинает двигаться криволинейно, хотя его управляемые
колеса находятся в нейтральном положении. Если скорость автомобиля больше vув, то разность δ2 - δ1 > L/Rэ, и угол θ
становится
отрицательным. Это означает, что для поворота автомобиля вправо передние колеса
нужно повернуть влево. Следовательно, автомобиль с излишней шинной
поворачиваемостью теряет управляемость, если его скорость больше критической vув.
Для определения критической скорости, приняв угол θ
=0, подставим в формулу
(2.7) разность углов δ1 и δ2 полученную из выражений (2.8) и
(2.9), тогда:
δ2 - δ1=( М2 / kу2 - М1 / kу1)×v2/Rэ = L/Rэ
Следовательно, критическая скорость по условиям увода:
vув= . (2.10)
. (2.10)
У
автомобиля с недостаточной или нейтральной шинной поворачиваемостью критическая
скорость отсутствует, так как при δ1
=δ2 подкоренное выражение
отрицательно и скорость vув, является мнимой величиной, а при δ1=δ2 она
равна бесконечности.
Чтобы
обеспечить недостаточную шинную поворачиваемость автомобиля, несколько
уменьшают давление воздуха в шинах передних колес по сравнению с давлением в
шинах задних колес и тем самым снижают коэффициент поворачиваемости (ηпов). Кроме того, центр тяжести автомобиля немного
смещают в сторону переднего моста, что увеличивает часть центробежной силы,
действующую на управляемые колеса.
.3 Устойчивость переднего и заднего мостов
При определении максимально допустимой (критической) скорости, с которой
можно вести автомобиль без поперечного скольжения vск предполагается [7,8,9,10,15], что продольные силы
отсутствуют и оба моста автомобиля скользят в поперечном направлении
одновременно. Такое явление в практике наблюдается редко, обычно раньше
начинают скользить колеса одного из мостов: заднего или переднего. Для качения
колеса без продольного и поперечного проскальзывания необходимы следующие
условия:
Fсц=Rz ×φ≥ ,
,
где
Rx, Ry, Rz,- касательная, поперечная, нормальная реакция дороги
на колесо.
Отсюда:
φ ≥ ,
,
где
χ=
Rx /Rz - удельная касательная реакция, равная для ведущего
колеса Fт /Rz, а для тормозного Fтор /Rz;
для ведомого колеса χ=f.
Поперечная
составляющая центробежной силы Fy определяет поперечную реакцию дороги на колесо
Fy =M×v2×θ/L= G×v2/(g×R). (2.11)
Подставим
вместо поперечной силы её значение по формуле (2.11),тогда:
φ 2=
χ 2 + (G×v2/(g×R×Rz))2.
Не
учитывая динамических нагрузок на колеса, можно приближенно принять Rz= G.
Следовательно, максимальная скорость, с которой автомобиль может двигаться без
скольжения при совместном действии касательных и поперечных сил,
v =
= .
.
Скорость
v меньше скорости vск,
определенной для случая равномерного движения автомобиля и разгона, примерно на
10…20%. При интенсивном торможении χ ≈ φ, при этом v≈ 0, и даже небольшое отклонение может привести
к заносу.
Аналогично
можно получить формулы, определяющие условия устойчивости переднего и заднего
мостов. Соответствующие критические скорости определяют по формулам:
vск1= ; (2.12)
; (2.12)
vск2= .
.
где
m1 и m2 - коэффициенты изменения вертикальных реакций; для
двухосных автомобилей при движении под действием силы тяги m1=0.8…0.9;
m2=1.05…1.1; при торможении m1=1.2…1.3 и m2=0.7…0.8.
При
активных режимах движения у заднеприводных автомобилей χ1˂χ2. При торможении колеса заднего моста разгружаются, а переднего
нагружаются и m1> m2 .Поэтому в обоих случаях vск1> vск2
, т.е. наиболее вероятен занос заднего моста.
На
рисунке 2.8, а показан автомобиль, движущийся криволинейно по дуге радиуса R.
Если скорость автомобиля v превышает критическое значение vск2,
то задний мост будет проскальзывать в поперечном направлении с некоторой
скоростью vу2. В результате сложения скоростей задний мост начнет
перемещаться по направлению вектора v3 и радиус уменьшается до R1.
Уменьшение радиуса вызывает увеличение центробежной силы, что в свою очередь
приведет к дальнейшему уменьшению радиуса. При некотором значении радиуса
начнут проскальзывать колеса переднего моста. Однако скорость поперечного
скольжения заднего моста все время будет расти быстрее, и автомобиль будет
двигаться по дуге непрерывно уменьшающегося радиуса. Такое движение автомобиля
называется заносом. Занос чрезвычайно опасен, так как развивается обычно быстро
и может привести к выходу автомобиля за пределы полосы движения или
опрокидыванию.

Рисунок
2.8 Занос переднего и заднего мостов автомобиля
Если
vск1<vск2, то при v=vск1 начинается
поперечное скольжение переднего моста со скоростью vу1. (рисунок
2.8 б). В этом случае передний мост перемещается по направлению вектора v3. и
радиус увеличивается от R до R1. Увеличение радиуса приводит к уменьшению
центробежной силы, и скорость vу1 понижается. Следовательно, такой автомобиль не
может войти в занос, хотя может частично утратить управляемость.
Чтобы
прервать начавшийся занос, нужно прекратить торможение или подачу топлива,
уменьшив тем самым величину χ. Кроме
того нужно повернуть передние колеса в сторону скольжения заднего моста. Пусть
во время начала заноса передние колеса занимали нейтральное положение и центр
поворота находился в точке O (рисунок 2.8 в). После поворота колес на угол θ центр поворота сместится в точку О1 и радиус поворота
увеличится от от R до R1, а центробежная сила уменьшится.
.4
Оценка управляемости автомобиля ГАЗ-31105
Исходными
данными для расчета характеристик управляемости являются:
.
Размерные параметры автомобиля ГАЗ-31105 [16]
а)
наибольшая ширина ………………Ba=1,846 м;
б)
наибольшая высота………………..Ha=1,476 м;
в)
база автомобиля……………………L=2,8 м;
г)
площадь лобового сопротивления может быть приближенно определена по выражению
[7]
Aв = αв×Ha× Ba =0,78×1,476×1,846=2,125 м2;
где
αв - коэффициент заполнения площади для легковых
автомобилей αв = =0,78…0,8. Принимаем αв = 0,78.
.
Снаряженная и полная масса автомобиля [16].
а)
снаряженная масса
m0=1470 кг;
в
том числе на заднюю ось m02=690 кг;
б)
полная масса
ma=1870 кг;
в
том числе на переднюю ось ma1 = 890 кг;
в
том числе на заднюю ось ma2 = 980 кг.
.
Координаты центра тяжести [17]
а)
высота центра тяжести
hц=0,595 м;
б)
расстояние от центра тяжести:
до
передней оси автомобиля
а
=( ma2/ ma)×L=980/1870×2,8 = 1,476 м;
до
задней оси автомобиля
b = L - a =
2,8 - 1,467 = 1,333 м.
.
Коэффициент полезного действия трансмиссии [7]
ηт= 0,8…0,92;
Принимаем
ηт= 0,92.
.
Коэффициент сопротивления воздуха [7]
kв = 0,15…0,35 H×c2/м4;
Принимаем
kв = 0,2 H×c2/м4
.
Статический радиус колеса. Для шин размером 205/70R14 статический
радиус колеса [16]
r = 0,295 м.
.
Максимальная мощность двигателя.
Ne max =
77,2 кDт при 4750 об/мин;
.
Максимальный крутящий момент двигателя
Ме
мах = 182 Н×м при 2500 - 3000 об/мин.
Определим
курсовой угол автомобиля при выполнении первого маневра (своевременный поворот
рулевого колеса и изменение направления движения). Курсовой угол автомобиля при
входе в поворот (γ1) и при выходе из поворота определяются согласно
формулам, приведенным в таблице 2.1:
γ1 = g×φy×T1 /(2×v) и γ2 = g×φy×T1 /v = 2×γ1.
Результаты
расчетов по этим формулам оформляем в виде таблиц 2.3, 2.4, 2.5, 2.6 и 2.7,
рисунков 2.9, 2.10, 2.11, 2.12 и 2.13 соответственно при времени Т1 поворота
рулевого колеса в одну сторону 0,5; 1; 1,5; 2; 3 с. φу = 0,5.
Таблица
2.3
Зависимость
курсового угла при входе и выходе из поворота от скорости движения автомобиля
при Т = 0.5 с.
|
Скорость движения авт., м/с
|
5
|
10
|
15
|
20
|
25
|
30
|
35
|
40
|
45
|
|
Курсовой угол γ1, рад
|
0.245
|
0.123
|
0.082
|
0.061
|
0.049
|
0.041
|
0.035
|
0.031
|
0.027
|
|
Курсовой угол γ2, рад
|
0.491
|
0.245
|
0.164
|
0.123
|
0.098
|
0.082
|
0.070
|
0.061
|
0.055
|
Таблица 2.4
Зависимость курсового угла при входе и выходе из поворота от скорости
автомобиля при Т = 1 с.
|
Скорость движения авт., м/с
|
5
|
10
|
15
|
20
|
25
|
30
|
35
|
40
|
45
|
|
Курсовой угол γ1, рад
|
0.491
|
0.245
|
0.164
|
0.123
|
0.098
|
0.082
|
0.070
|
0.061
|
0.055
|
|
Курсовой угол γ2, рад
|
0.981
|
0.491
|
0.327
|
0.245
|
0.196
|
0.164
|
0.140
|
0.123
|
0.105
|
Таблица 2.5
Зависимость курсового угла при входе и выходе из поворота от скорости
автомобиля при Т = 1,5 с.
|
Скорость движения авт., м/с
|
5
|
10
|
15
|
20
|
25
|
30
|
35
|
40
|
45
|
|
Курсовой угол γ1, рад
|
0.736
|
0.368
|
0.245
|
0.184
|
0.147
|
0.123
|
0.105
|
0.092
|
0.082
|
|
Курсовой угол γ2, рад
|
1.472
|
0.736
|
0.491
|
0.368
|
0.294
|
0.245
|
0.210
|
0.184
|
0.164
|
Таблица 2.6
Зависимость курсового угла при входе и выходе из поворота от скорости
автомобиля при Т = 2 с.
|
Скорость движения авт., м/с
|
5
|
10
|
15
|
20
|
25
|
30
|
35
|
40
|
45
|
|
Курсовой угол γ1, рад
|
0.981
|
0.491
|
0.327
|
0.245
|
0.196
|
0.164
|
0.140
|
0.123
|
0.105
|
|
Курсовой угол γ2, рад
|
1.962
|
0.981
|
0.654
|
0.491
|
0.392
|
0.327
|
0.280
|
0.245
|
0.218
|
Таблица 2.7
Зависимость курсового угла при входе и выходе из поворота от скорости
автомобиля при Т = 3 с.
|
Скорость движения авт., м/с
|
5
|
10
|
15
|
20
|
25
|
30
|
35
|
40
|
45
|
|
Курсовой угол γ1, рад
|
1.472
|
0.736
|
0.491
|
0.368
|
0.294
|
0.245
|
0.210
|
0.184
|
0.164
|
|
Курсовой угол γ2, рад
|
2.943
|
1.472
|
0.981
|
0.736
|
0.589
|
0.491
|
0.420
|
0.368
|
0.327
|
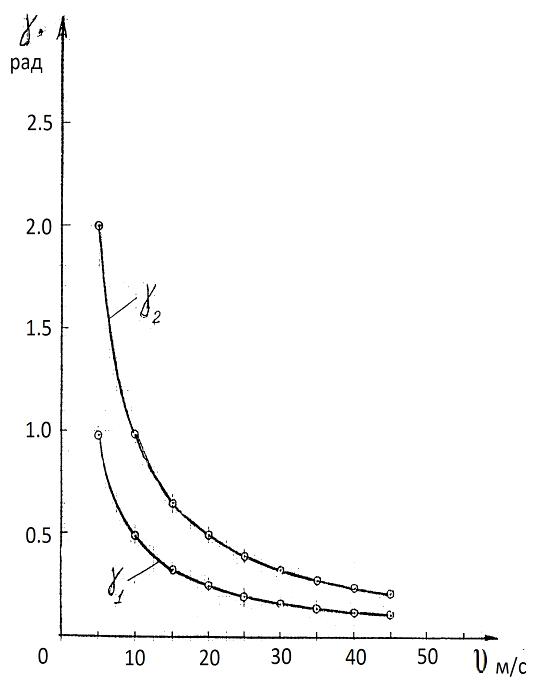
Как видим из рисунков 2.9 - 2.13 курсовой угол при входе и выходе из
поворотов возрастает прямо пропорционально времени Т1 первой фазы поворота
(увеличения угла поворота θ управляемых колес) и обратно
пропорционально скорости движения. Так за время Т1=0,5 с при возрастании
скорости движения с 5 м/с до 20 м/с курсовой угол поворота автомобиля при входе
в поворот увеличивается с 0,245 до 0,61 рад. При увеличение времени Т1 с 0,5 до
3 с при скорости движения 20 м/с курсовой угол γ1 при входе в поворот увеличивается с
0,061 рад до 0,368 рад.

Рисунок 2.9 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=0,5с
Рисунок 2.10 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=1с
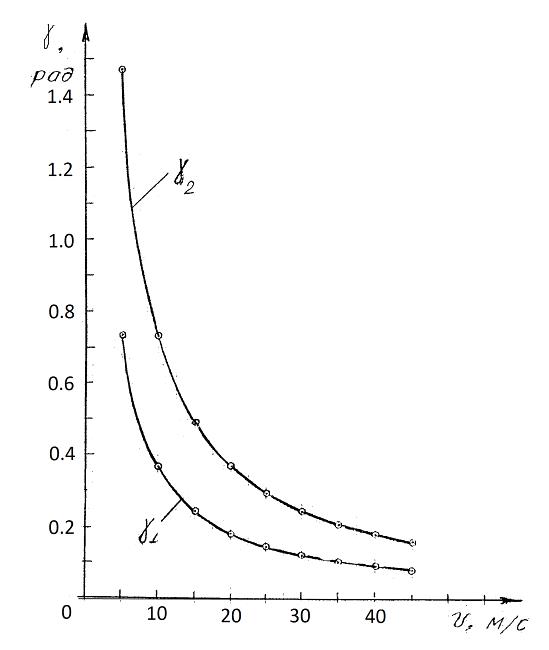
Рисунок 2.11 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=1,5 с
Таким образом, формулы, приведенные в таблице 2.1 позволяют найти γ,
x, y и определить положение автомобиля на дороге в процессе входа
в поворот.
Для оценки непосредственно связанной с управляемостью устойчивости
переднего и заднего мостов автомобиля рассчитаем и построим график зависимости
максимально возможной скорости без скольжения при совместном действии на
автомобиль касательных и поперечных сил от удельной касательной реакции колес.
Максимальная скорость, с которой автомобиль может двигаться без
скольжения при совместном действии касательных и поперечных сил, определяется
по формуле:
v=. (2.13)
где
χ=
Rx /Rz - удельная касательная реакция, равная для ведущего
колеса Fт /Rz, а для тормозного Fтор /Rz;
для ведомого колеса χ=f.
Принимаем R=100 м; φ=0.7.
Результаты
расчетов по формуле (2.13) оформляем таблицей 2.8 и рисунком 2.14.
Рисунок
2.12 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=2,0 с
Как
видно таблицы 2.8 и рисунка 2.14 с возрастанием удельной касательной реакции χ максимально возможная скорость v без
скольжения медленно убывает, а при постоянной касательной реакции возрастает в  раз, при увеличении радиуса поворота в K
раз.
раз, при увеличении радиуса поворота в K
раз.
Рассчитаем
и построим график зависимости критической скорости автомобиля по условиям увода
от отношения массы, приходящийся на заднюю ось к общей массе автомобиля.
Критическая
скорость автомобиля по условиям увода определяется по формуле (2.10).
Таблица
2.8
Максимальная
возможная скорость без скольжения при совместном действии на автомобиль
касательных и поперечных сил
|
χ
|
0,05
|
0,1
|
0,2
|
0,3
|
0,4
|
0,5
|
0,6
|
0,65
|
|
v (R=100м)26,17126,0725,65324,90923,73921,92318,80715,965
|
|
|
|
|
|
|
|
|
|
v (R=200м)37,01236,86936,27935,22633,57231,00326,59722,577
|
|
|
|
|
|
|
|
|
|
v (R=300м)45,33045,15544,43243,14341,11737,97132,57527,652
|
|
|
|
|
|
|
|
|
|
vск (R=400м)
|
52,343
|
52,140
|
51,306
|
49,817
|
47,478
|
43,845
|
37,614
|
31,929
|
|
vск (R=500м)
|
58,521
|
58,295
|
57,362
|
55,697
|
53,082
|
49,020
|
42,054
|
35,698
|
Рисунок
2.14 Зависимость v от удельной касательной реакции χ при радиусе поворота: 1 - 100 м; 2 - 200 м; 3 - 300
м; 4 - 400 м; 5 - 500 м

где
М1 и М2 - массы отнесенные соответственно переднего и заднего мостов, кг;
kув1 и kув2
- коэффициенты сопротивления увода соответственно переднего и заднего мостов,
Н/рад.
Для
мостов легковых автомобилей kув находится в пределах 33700…67500 Н/рад.
Для
переднего моста грузовых автомобилей kув1 = 78700…135000 Н/рад.
Для
заднего моста грузовых автомобилей kув2 = 157400…270000 Н/рад.
Расчет
выполним для 3 вариантов значений kув1 и kув2.
.
kув1 = 50000 Н/рад; kув2 = 40000
Н/рад;
.
kув1 = kув2 = 50000 Н/рад;
.
kув1 = 40000 Н/рад; kув2 = 50000
Н/рад;
Результаты
расчета по формуле (2.10) оформляем в виде таблиц 2.9, 2.10, 2.11 и рисунка
2.15.
Таблица
2.9
Критическая
скорость автомобиля по условиям увода (см. 1 вариант).
|
М2/М
|
0,45
|
0,5
|
0,55
|
0,6
|
0,65
|
0,7
|
0,75
|
|
vув
|
77,391
|
24,473
|
17,755
|
14,625
|
12,723
|
11,411
|
10,435
|
М - общая масса автомобиля.
Таблица 2.10
Критическая скорость автомобиля по условиям увода (см. 2 вариант).
|
М2/М
|
0,45
|
0,5
|
0,55
|
0,6
|
0,65
|
0,7
|
0,75
|
|
vув
|
-
|
∞
|
27,36
|
19,348
|
15,797
|
13,681
|
12,237
|
Таблица 2.11
Критическая скорость автомобиля по условиям увода (см. 3 вариант).
|
М2/М
|
0,45
|
0,5
|
0,55
|
0,6
|
0,65
|
0,7
|
0,75
|
|
vув
|
-
|
-
|
-
|
27,362
|
18,770
|
15,176
|
13,081
|
Как видно из рисунка 2.15 и таблиц 2.9, 2.10, 2.11 критическая скорость
по условиям увода автомобиля ГАЗ - 31105 является очень высокой при М2/М до
0,5, затем она уменьшается достигая значений 10…13 м/с при М2/М = 0,9.
Наибольшее значение vув наблюдается в
третьем варианте, когда kув1 =
40000 Н/рад; kув2 = 50000 Н/рад, то есть наиболее
приемлемым для поворачиваемости автомобиля ГАЗ - 31105 является превышение
коэффициента сопротивления уводу задних колес по сравнению с передними.

Рисунок 2.15 Зависимость критической скорости автомобиля ГАЗ - 31105 по
условиям увода от отношения М2/М:
. kув1 = 50000 Н/рад; kув2 = 40000 Н/рад;
. kув1 = kув2 = 50000 Н/рад;
. kув1 = 40000 Н/рад; kув2 = 50000 Н/рад
3. Управляемость как эксплуатационное качество, обеспечивающее активную
безопасность автомобиля
.1 Влияние технического состояния автомобиля на его
устойчивость и управляемость
На устойчивость и управляемость прежде всего влияет
техническое состояние ходовой части и органов управления автомобиля. Так, по
мере изнашивания и уменьшения высоты выступов протектора шин падает коэффициент
сцепления. На сухих дорогах с твердым покрытием коэффициент сцепления у шин с
полностью изношенным протектором в 1,5…2 раза меньше, чем у новых. Особенно
заметно уменьшение φ при движении автомобиля по мокрому покрытию с большой
скоростью (рисунок 3.1, a).
Уменьшение коэффициента сцепления приводит к увеличению тормозного и
остановочного путей автомобиля и потере им поперечной устойчивости. Поэтому
правила дорожного движения запрещают эксплуатацию автомобилей с шинами, у
которых глубина протектора менее 1...2 мм.
Рисунок 3.1 Влияние износа протектора на
эксплуатационные показатели: а - на коэффициент сцепления φх; б - на коэффициент сопротивления
уводу kув; 1 - сухое покрытие; 2 - мокрое
покрытие; 3 - вертикальная нагрузка 14 кН; 4 - вертикальная нагрузка 9 кН
Если с правой и левой сторон автомобиля установлены
шины с различной степенью износа, то при торможении возникает момент, который
может привести к повороту автомобиля и аварии. Вместе с тем по мере изнашивания
протектора и уменьшения его высоты увеличивается сопротивление шины уводу.
Коэффициент kув у полностью изношенных шин на
50…70% больше, чем у новых (рисунок 3.1, б). Поэтому при установке на передний
мост более изношенных шин автомобиль может приобрести излишнюю поворачиваемость,
что ухудшит его управляемость.
Неправильная регулировка тормозных механизмов и
замасливание фрикционных накладок могут привести к различной величине тормозных
моментов на колесах правой и левой сторон автомобиля и, как следствие, к потере
устойчивости. К таким же результатам приводит неисправность одного из тормозных
механизмов. Неисправность переднего тормозного механизма более опасна, чем
неисправность заднего. Автомобиль с неисправными передними тормозами
отклоняется на больший угол, чем автомобиль, имеющий неисправные задние
тормозные механизмы (рисунок 3.2).
Рисунок 3.2 Угловое отклонение автомобиля при
торможении:
- неисправен один передний тормозной механизм; 2 -
неисправен один задний тормозной механизм
При изнашивании деталей рулевого управления и
переднего моста (рулевого механизма, шаровых шарниров тяг, шкворней и их
втулок) увеличивается свободный ход рулевого колеса, что отрицательно
сказывается на курсовой устойчивости автомобиля. Движение автомобиля становится
трудно контролируемым, резко возрастает частота поворотов рулевого колеса,
необходимых для сохранения прямолинейного движения.
В таблице 3.1 приведены результаты дорожных испытаний
автобуса ПАЗ-672 с различным техническим состоянием рулевого управления и
переднего моста (по данным МАДИ).
Таблица 3.1
Скорость поперечного смещения автобуса, м/с
|
Состояние рулевого
управления и переднего моста
|
Скорость движения, км/ч
|
|
30
|
60
|
|
Рулевое управление
отрегулировано
|
0,033
|
0,14
|
|
Пробки шарниров рулевых тяг
отпущены на 0,5 оборота
|
0,133
|
0,22
|
|
Зазор в подшипниках ступиц
равен 0,12 мм
|
0,086
|
0,21
|
|
Зазор между шкворнем и
втулками равен 0,45 мм
|
0,144
|
0,26
|
|
Нарушена регулировка
рабочей пары
|
0,119
|
0,22
|
При наличии свободного хода нарушается кинематическая
связь между рулевым колесом и передними колесами, что затрудняет выполнение
маневра. На рисунке 3.3 показано, как изменяются углы поворота управляемых
колес и траектории автомобиля при различном свободном ходе рулевого колеса.
Если свободный ход рулевого колеса отсутствует, то при постоянном передаточном
числе рулевого управления законы изменения углов поворота рулевого колеса θрк и передних колес θ
аналогичны. Если
свободный ход рулевого колеса отсутствует, то в конце маневра θрк и θ равны нулю, а автомобиль движется
параллельно прежнему направлению.

Рисунок 3.3 Изменение поворота передних колес и
траектории автомобиля: 1 - при отсутствии свободного хода рулевого колеса; 2 -
при наличии свободного хода рулевого колеса.
При наличии свободного хода рулевого колеса (линия 2)
появляются зоны нечувствительности - горизонтальные участки. При изменении
направления вращения рулевого колеса угол поворота управляемых колес остается
некоторое время неизменным. Эпюра θ = θ(t) и траектория автомобиля утрачивают
симметричность. В конце маневра, когда рулевое колесо возвращено в нейтральное
положение (точка В), передние колеса остаются все еще повернутыми на некоторый
угол θ0. Курсовой угол автомобиля также не
равен нулю, и для выравнивания автомобиля нужны дополнительные действия.
Предельные значения свободного хода, определенные с
помощью динамометра-люфтомера, приведены в таблице 3.2. Для автобусов и
грузовых автомобилей, созданных на базе легковых автомобилей, предельное
значение свободного хода равно 10° при усилии 7,5 Н.
Предельные значения свободного хода рулевого колеса
|
Тип автомобиля
|
Собственная масса
автомобиля, приходящаяся на управляемые колеса, т
|
Усилие по шкале
динамометра, Н
|
Свободный ход, не более
|
|
Легковые
|
До 1,60
|
7,35
|
10°
|
|
Автобусы
|
До 1,60
|
7,35
|
20°
|
|
Св. 1,60 до 3,86
|
9.80
|
|
|
Св. 3,86
|
12,30
|
|
|
Грузовые
|
До 1,60
|
7,35
|
25°
|
|
Св. 1,60 до 3,86
|
9,80
|
|
|
Св. 3,86
|
12,30
|
|
При недоброкачественном ремонте или техническом
обслуживании автомобиля в результате слишком плотной посадки шкворней во втулки
и чрезмерной затяжки гаек рулевых тяг может значительно возрасти усилие,
необходимое для поворота передних колес, что также осложняет работу водителя и
ухудшает управляемость.
Примерные значения предельных усилий приведены в
таблице 3.3.
Резкое увеличение прикладываемого к рулевому колесу
усилия, приводящее к потере управляемости автомобилем, может быть вызвано
заклиниванием рулевого управления вследствие поломки деталей рулевого механизма
(ролика, червяка), заедания сухарей в шаровых шарнирах или неисправности
противоугонного устройства. Заклинивание рулевого управления обычно приводит к
весьма тяжелым последствиям, так как водитель не сразу осознает необходимость
экстренного торможения, а некоторое время пытается повернуть рулевое колесо.
Автомобиль же, утратив управляемость, продолжает двигаться с повернутыми
передними колесами и быстро оказывается на полосе встречного движения или за
пределами дороги.
Если не учитывать увода колес, то автомобиль за время t, двигаясь по дуге постоянного
радиуса R (рисунок 3.4, а), переместится из
положения 1 в положение 2 и повернется на угол γ.
Таблица 3.3
Примерные значения усилий на ободе рулевого колеса.
|
Вид рулевого привода
|
Тип автомобиля
|
Собственная масса
автомобиля, приходящаяся на управляемые колеса, т
|
Предельное усилие. Н
|
|
Механический
|
Все типы То же Грузовые и
автобусы
|
До 0,80 Св. 0,80 до 1,60
Св. 1,60
|
- 140 200
|
|
С усилителем
|
Легковые Грузовые и
автобусы Грузовые и автобусы Грузовые и автобусы Автобусы Грузовые
|
До 1,60 До 2,80 Св. 2,80 до
3,31 Св. 3,31 до 3,86 Св. 3,86 Св. 3,86
|
- 180 250 320 350 450
|
Заменив приближенно дугу АА1, длина которой равна пути
автомобиля S, хордой, получим:
S = v×t = R×γ ≈ γ×L /θ
Отсюда курсовой угол:
γ = v×t×θ
/L.
Треугольник АОА1 равнобедренный, следовательно, углы у
основания равны 90 - γ/2, а угол A1AB равен γ/2.
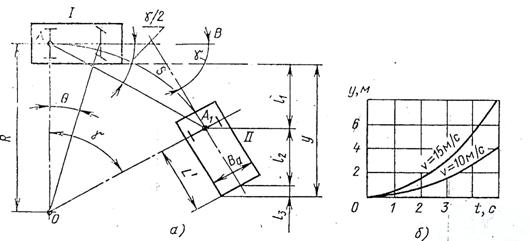
Рисунок 3.4 Движение автомобиля при заклинивании
рулевого управления: а - схема поворота автомобиля; б - изменение поперечного
смешения у автомобиля
Поперечное смещение правого переднего угла автомобиля
в процессе поворота:
у = l1 + l2 + l3 = (S×sin (γ/2) - 0,5×Ba) + L'
×sin γ
+ 0,5×Ba×cos
γ.
На рисунке 3.4, б показана зависимость поперечного
смещения у легкового автомобиля от времени t при θ = 0,01 рад (0,6°) и v = 10 и 15 м/с. Принятые при расчете значения угла поворота и
скорости невелики, однако поперечное смещение нарастает весьма быстро. При v=10 м/с через 5 с оно достигает 4 м,
следовательно, неуправляемый автомобиль, поворачиваясь, полностью перекроет
соседнюю полосу движения, что может привести к серьезной аварии.
В процессе движения автомобиля даже по дороге с
покрытием отличного качества происходят колебания управляемых колес. Эти
колебания увеличивают динамические нагрузки на детали ходовой части и рулевого
управления и при больших размахах могут привести к потере автомобилем
управляемости [18].
Особенно велики угловые колебания при дисбалансе
колес.
На рисунке 3.5 приведены результаты испытаний
грузового автомобиля с различным дисбалансом передних колес. С увеличением
дисбаланса растут амплитуда колебания Аср (рисунок 3.5, а) и усилия в рулевом
приводе Ррп (рисунок 3.5, б).

Рисунок 3.5 Влияние дисбаланса колес на амплитуду Аср
колебаний и усилия Ррп в рулевом приводе: 1 - дисбаланс колес равен 4,5…4,8×Н×м; 2 - дисбаланс колес равен 1,2×Н×м; 3 - сбалансированные колеса
Вертикальные колебания колес и кузова обычно гасятся
амортизаторами. При неисправных амортизаторах колебания затухают медленно. Если
частота ударов от неровностей на дороге близка частоте собственных колебаний,
то возможен резонанс и отрыв колес от дороги. На рисунке 3.6 показано изменение
вертикальных нагрузок на колеса легкового автомобиля с неисправными
амортизаторами при скорости около 20 м/с. Испытания проводили на участке
дороги, где произошло несколько аварий из-за потери автомобилем управляемости.
Как видно из графика, менее чем за 0,5 с вертикальная нагрузка 5 раз была равна
нулю, т. е. колесо отрывалось от дороги. Поскольку каждый вертикальный толчок
обычно связан с боковым ударом, то колеса в момент отрыва могли поворачиваться.
Таким образом, неудовлетворительная плавность хода автомобилей могла быть
причиной повышенной аварийности на данном участке.
Рисунок 3.6 Изменение вертикальных нагрузок Rz на колеса легкового автомобиля на
аварийном участке дороги
.2 Влияние эксплуатационных факторов на управляемость
и устойчивость
Давление воздуха в шинах. Снижение давления воздуха в
шине увеличивает угол увода колеса, а увеличение давления уменьшает его [7, 9].
Поэтому за давлением воздуха нужно следить в целях безопасности. Особенно
опасно снижение давления у колес задней оси, когда угол увода задней оси
становится больше угла увода передней оси и автомобиль приобретает
отрицательный запас устойчивости.
Нагрузка. Повышение нагрузки на ось увеличивает
величину увода колес. Поэтому в инструкциях по эксплуатации некоторых легковых
автомобилей имеется указание об установлении давления воздуха в шинах в
соответствии с нагрузкой. Если после загрузки автомобиля его чувствительность к
повороту рулевого колеса и внешним воздействиям заметно возросла, то независимо
от указаний инструкции необходимо повысить давление в шинах задней оси на
0,02…0,03 МПа против шин передних колес, а при большой нагрузке на заднюю ось
даже выше рекомендуемого инструкцией. Снижение срока службы шины при этом
предотвратит травмы людей и обойдется дешевле ремонта автомобиля и потери груза
в случае аварии.
Необходимо также иметь в виду, что увеличение высоты
расположения центра тяжести нагруженного автомобиля (например, при перевозке
грузов с малой плотностью или при расположении груза на крыше легкового
автомобиля) увеличивает возможность возникновения поперечных колебаний кузова и
автомобиля, которые приводят к перегрузке шин одной стороны автомобиля и
резкому увеличению углов увода, что ухудшает демпфирование курсовых колебаний
автомобиля или даже возбуждает их.
Тяговая и тормозная силы. При действии на ось тяговой
или тормозной силы увод пропорционален величине этих сил. Поэтому у автомобиля
с передним приводом увеличение силы тяги вызывает рост запаса устойчивости во
всех случаях. У автомобиля с задним приводом на дороге с высоким коэффициентом
сцепления, когда сила тяги значительно меньше силы сцепления, увеличение
тягового усилия при движении по кривым малых радиусов (20…30 м) может привести
к увеличению запаса устойчивости. Во всех остальных случаях увеличение тяги на
задней оси уменьшает запас устойчивости.
Изменение запаса устойчивости при торможении зависит
от начала блокировки колес. Если это происходит с колесами переднего моста,
запас устойчивости возрастает. При блокировке задних колес запас устойчивости
становится отрицательным, а в случае одновременной блокировки колес обоих
мостов - нулевым.
При увеличении продольной реакции тормозной или
тяговой силы предельная величина поперечной реакции в контакте колеса с дорогой
уменьшается (рисунок 3.7). При достижении на любой из осей равенства продольной
реакции и силы сцепления эта ось начнет скользить вбок под действием даже
незначительной поперечной силы. Поэтому при достижении предела по сцеплению
увод может возрастать до бесконечности. В этом случае произойдет либо полная
потеря чувствительности автомобиля к повороту рулевого колеса (максимальный
запас устойчивости) при достижении предела по сцеплению на передней оси, либо
занос и потеря управляемости при достижении этого предела на задней оси
(максимальное абсолютное значение отрицательного запаса устойчивости).
Скользкость покрытия. При скользком покрытии резко
снижается коэффициент сцепления шин с дорогой, что уменьшает запас устойчивости
автомобиля с задним приводом. При равенстве сил тяги и сцепления такой
автомобиль будет неустойчивым на любой скорости. Запас устойчивости автомобиля
с передним ведущим мостом возрастает, однако он становится нечувствительным к
повороту рулевого колеса.
Интенсивность приложения управляющего воздействия,
скорость и боковые перегрузки. Результаты испытаний на автополигоне показывают,
что величина запаса устойчивости в значительной степени зависит от характера
приложения управляющих воздействий и режим движения. Если при плавном повороте
рулевого колеса автомобиль обладает положительным запасом устойчивости, то при
его резком повороте запас устойчивости может стать отрицательным. Величина
запаса устойчивости конкретного автомобиля зависит также от скорости движения и
боковой перегрузки. Каждому значению боковой перегрузки в нелинейной области
соответствует критическое значение скорости, которое уменьшается с ее ростом.
Учитывая, что наличие тормозных сил уменьшает величины боковых реакций на
колесах, совершенно ясно, что одним из основных правил управления автомобилем в
режимах движения, приближающихся к пределу использования сил сцепления,
является раздельное применение тормозов и рулевого колеса.
Рисунок 3.7 Влияние тяговой и тормозной силы на
величину поперечной силы сцепления:
- продольные силы; 2 - поперечные силы; Ps - суммарная сила
Тормозить с максимальным замедлением можно только на
прямой. Двигаться по кривой при максимальном боковом ускорении можно только при
отсутствии тормозных сил на колесах. Поэтому, когда автомобиль входит в поворот
с предельной скоростью и при этом необходимо ликвидировать занос, нужно немедленно
отпустить педаль тормоза. В противном случае автомобиль не будет реагировать на
поворот рулевого колеса. Однако реально выполнение этих действий психологически
затруднено, так как они находятся в противоречии с тем, что подсказывает
инстинкт самосохранения.
Изменчивость свойств автомобиля в различных
эксплуатационных условиях делает недостижимым полное использование его
возможностей во всех случаях без специального изучения особенностей управления
конкретным автомобилем и проведения систематических тренировок на этом типе
автомобиля в тех дорожных условиях, в которых он эксплуатируется.
Для получения желаемых характеристик управляемости
необходимо нормировать параметры устойчивости автомобиля. В этом направлении
ведется работа, как в нашей стране, так и за рубежом. В США разработан
Федеральный стандарт на устойчивость легковых автомобилей, предусматривающий
нормирование таких параметров, как чувствительность автомобиля по угловой
скорости к повороту управляемых колес в установившемся режиме движения и характер
ее изменения и зависимости от скорости и боковой перегрузки; чувствительность
автомобиля по угловой скорости к повороту управляемых колес в переходном
процессе при скачкообразном изменении их положения; стабилизация автомобиля
относительно курсового угла при освобождении рулевого колеса и возвращении его
в нейтральное положение; устойчивость автомобиля при действии бокового ветра;
усилие на рулевом колесе.
В СНГ предусмотрено нормирование перечисленных
параметров для автотранспортных средств всех категорий.
.3 Приемы управления автомобилем в аварийных ситуациях
Уверенные действия водителя в аварийных ситуациях
возможны только в том случае, если он понимает, как влияют на поведение
автомобиля различные факторы вообще и знает особенности конкретного автомобиля.
Последнее может быть достигнуто только регулярными тренировками на автомобиле
данного типа.
Торможение и разгон с учетом силы сцепления.
Представим, что, двигаясь с высокой скоростью, водитель поздно увидел крутой
поворот или на дороге неожиданно возникло препятствие. Наиболее правильной
реакцией в большинстве, но не во всех случаях, будет экстренное торможение. Эта
реакция правильна на дороге с ровным сухим покрытием и распределением тормозных
сил по осям пропорционально нагрузке, что обеспечивает сохранение
положительного запаса статической устойчивости. В данном случае автомобиль
будет двигаться прямо и водитель лишь не должен допускать блокировки колес. Для
этого при нажатии па педаль тормоза усилие увеличивается только до начала
блокировки. Затем его необходимо снизить, чтобы колеса разблокировались. После
этого, увеличивая усилие на педаль тормоза, довести колеса до начала блокировки
и отпустить педаль, повторив это несколько раз. Чем выше частота нажатия и
отпускания педали и меньше отклонения от усилия, вызывающего начало блокировки,
тем эффективнее торможение и короче тормозной путь. При тормозах с
гидравлическим приводом без усилителя или с правильно отрегулированным
усилителем момент начала блокировки создает на педали ощущение как при сжатии
пружины до конца, когда нога начала давить в неподвижную опору. Если усилие на
педали тормоза, вызывающее блокировку колес, небольшое, момент появления
блокировки нужно определять по другим признакам. На дороге с высоким
коэффициентом сцепления юз колес вызывает характерный звук, на скользкой дороге
его определить можно, только имея опыт. Если колеса задней оси блокируются
раньше, запас статической устойчивости становится отрицательным, а величина
критической боковой силы - близкой к нулю, что приводит к заносу. Наиболее
часто встречающаяся в этой ситуации ошибка, - попытка вывести автомобиль из
заноса, не прекращая торможения. Поэтому для прекращения заноса, сначала нужно
отпустить педаль тормоза, а затем уже повернуть рулевое колесо в сторону
заноса. Как только занос прекратится, и автомобиль будет двигаться
прямолинейно, можно начинать новое торможение.
Если при торможении передние колеса начинают уводить в
сторону, это бывает при неравномерной работе передних тормозов, чтобы выровнять
автомобиль, необходимо сначала также отпустить педаль тормоза. Попытка в этой
ситуации выровнять автомобиль, не прекращая торможения, опасна. При
заблокированных передних колесах автомобиль не реагирует на поворот рулевого
колеса. Водитель, начиная поворачивать его, ошибочно надеется на то, что это
может заставить автомобиль переместиться в нужном направлении. Однако в этом
случае колеса будут повернуты на угол значительно больший, чем необходимо для
движения в нужном направлении, и если водитель отпустит педаль тормоза, то
автомобиль буквально «прыгнет» в сторону, что может привести к аварии.
Тормозить в гололед даже в аварийной ситуации нужно,
не выключая сцепления до самого последнего момента, так как в этом случае
передние (не ведущие) колеса будут быстро блокироваться, задние же благодаря
подводимому крутящему моменту не заблокируются. Запас устойчивости при этом
останется положительным и опасность заноса автомобиля уменьшится.
Ошибочно считается, что торможение двигателем на
скользкой дороге всегда спасает от заноса. Безусловно, это снижает вероятность
заноса, так как тормозной момент двигателя значительно меньше создаваемого
тормозами и регулируется более плавно. Однако такое торможение безопасно только
до момента, пока тормозная сила, создаваемая двигателем, не превысит силы
сцепления колёс с дорогой. После этого в случае привода на задние колеса
начнется занос, и прекратить его будет можно, только сняв с задних колес
тормозной момент, т. е. выжав сцепление. Теоретически это сделать можно,
увеличив частоту вращения коленчатого вала двигателя. Однако на практике это
может не получиться даже у хорошо подготовленного водителя, так как на поиск
положения педали управления подачей топлива, соответствующего перехода работы
двигателя из режима торможения в режим тяги, отпущены доли секунды. Поэтому
если занос не прекращается, необходимо выключить сцепление. В этом случае
отсутствие продольных сил на колесах будет гарантировано.
Приемы торможения па границе «юза» можно выразить
следующей фразой, если нажимаешь па педаль тормоза, то колеса должны находиться
в прямом положении, если поворачиваешь рулевое колесо, то должна быть отпущена
педаль тормоза.
Умение выполнять разгон с полным использовавшем силы
сцепления необходимо тогда, когда при обгоне обнаружено, что встречный
автомобиль приближается значительно быстрее, чем предполагалось. Однако следует
помнить, что при движении в гололед на заснеженной дороге занос автомобиля
может возникнуть не только в процессе торможения, но и при разгоне.
Техника разгона на границе буксования аналогична
технике торможения на границе «юза». В начальный момент нажатие па педаль
управления подачей топлива осуществляется достаточно быстро (но не резко) до
начала буксования ведущих колес, после чего необходимо начать отпускать педаль.
При прекращении буксования нужно снова плавно нажать на педаль до появления
буксования и затем все повторять снова. Чем раньше будет прекращаться
буксование и чем меньшим будет снижение тяги, необходимое для его устранения,
тем быстрее произойдет разгон.
При разгоне на пределе буксования обычно возникают
заносы автомобиля. Для прекращения их необходимо одновременно с поворотом
рулевого колеса уменьшать тяговую силу. Чем сильнее занос, тем больше придется
отпустить педаль подачи топлива. Однако, если при этом возникнет торможение
двигателем, оно будет способствовать развитию заноса, для устранения которого
может оказаться необходимым выключить сцепление, как в случае торможения
двигателем.
Максимальное ускорение при разгоне на скользком
покрытии определяется силой сцепления колес с дорогой. В этом случае очень
важно вовремя перейти на высшую передачу, чтобы уменьшить силу тяги. Следует
отметить, что на низших передачах значительно труднее уловить границу
сцепления, поэтому точные рекомендации о выборе момента переключения передач в
этих условиях невозможны. Однако следует указать на то, что если даже плавное
нажатие на педаль управления подачей топлива сразу же вызывает занос, то нужно
переходить на более высокую передачу. Правильным действием в этих условиях
можно научиться только на основании опыта.
Если необходим быстрый разгон на дороге с высоким
коэффициентом сцепления, нужно обеспечить полное использование мощности
двигателя и соответственно тяговой силы на передачах, но для этого недостаточно
только переключения передач при максимальных частотах вращения коленчатого
вала. Необходимо также и само переключение передач выполнять как можно быстрее.
Приемы быстрого переключения передач хорошо описаны известным польским гонщиком
Собеславом Засадой. Однако при разгоне всегда следует помнить об ограничении
максимальных скоростей движения, введенном в стране с 01.01.1976 г.
Когда тормозить уже бесполезно. Бывают случаи; когда
скорость движения была слишком велика, а путь торможения мал. В следующее
мгновение автомобиль должен войти в поворот, а скорость значительно выше
допустимой. В этих случаях торможение становится бесполезным, и последний шанс
заключается в способности отпустить педаль тормоза и управлять автомобилем при
помощи рулевого колеса и, в некоторой мере, при помощи педалей управления
подачей топлива и сцепления. Действия водителя в этих случаях определяются
величиной запаса курсовой устойчивости автомобиля, которая, однако, не остается
неизменной. Если такие ситуации возникли на дороге с твердым сухим покрытием,
имеющим высокий коэффициент сцепления, то перед началом поворота необходимо
включить более низкую передачу, на которой двигатель при данной скорости будет
работать с частотой вращения коленчатого вала, близкой к максимальной. Когда
времени достаточно для торможения и дорожная ситуация позволяет, желательно
перед началом поворота оказаться возле внешней по отношению к центру кривой
кромки дороги. Начинать поворот нужно с некоторым опережением, которое можно
определить только па основании опыта. Для компенсации запаздывания реакции
автомобиля, которое всегда увеличивается с ростом скорости, необходим быстрый
опережающий поворот рулевого колеса. Чтобы увеличить радиус поворота, его
следует проходить, направляя автомобиль так, чтобы он двигался от внешней к
внутренней по отношению к центру поворота кромке твердого покрытия дороги и
возвращался на внешнюю сторону, описывая плавную дугу. Однако выезд на полосу
встречного движения для разрядки аварийной ситуации допустим только при
достаточной видимости дороги и отсутствии встречных транспортных средств. При
положительном запасе устойчивости, который, как правило, имеет большинство
автомобилей, с увеличением скорости возрастает необходимый для движения по
криволинейной траектории угол поворота управляемых колес. Для каждого автомобиля
в конкретных условиях движения существуют критические значения скорости и угла
поворота управляемых колес, при достижении которых его передняя ось начнет
скользить и дальнейший поворот рулевого колеса уже не будет уменьшать радиус
поворота. Когда наступает такой момент, дальнейший поворот рулевого колеса
становится не только бесполезным, но даже опасным. Сопротивление движению па
повороте, когда автомобиль достигает предела по сцеплению, резко возрастает и
его скорость начинает уменьшаться. При скольжении передней оси остается только
ждать, что произойдет раньше: уменьшится ли скорость до величины, позволяющей
двигаться по данному повороту, или автомобиль достигнет края дороги. Если
автомобиль к моменту восстановления чувствительности к повороту рулевого колеса
не сойдет с дороги, то при повернутых на больший, чем необходимо угол
управляемых колес он может совершенно неожиданно для водителя устремиться в
сторону поворота рулевого колеса. Это явление аналогично растормаживанию
повернутых колес. Так как уменьшение скорости в данной ситуации является
единственной возможностью предотвращения опасных последствий, торможение
двигателем будет единственно правильным действием.
Увеличение тяги на колесах в данных ситуациях вызовет
более медленное снижение скорости, и поэтому может оказаться полезным только в
том случае, когда это вызовет занос задней оси при хорошем сцеплении передних
колес. При этом радиус поворота будет уменьшаться.
При снижении коэффициента сцепления или вследствие
конструктивных особенностей автомобиля запас устойчивости может иметь
отрицательные значения, при которых величина боковой силы превысит критическое
значение, что вызовет занос. Характер необходимых управляющих действий в этом
случае изменится. Вопрос о том, можно ли тормозить двигателем и с какой
интенсивностью, для этого случая не имеет однозначного решения. Все
определяется скоростью заноса и возможностью его прекращения при наличии
тормозного момента на задних колесах. В большинстве случаев этот вопрос
приходится решать в процессе развития аварийной ситуации. Выключение сцепления
является последней попыткой остановить занос. Нельзя заранее определить,
насколько и как нужно повернуть рулевое колесо. Действия водителя определяются
только поведением автомобиля. Можно лишь сформировать несколько общих
положений.
Имеется критический угол поворота продольной оси
автомобиля, при котором прекращение заноса становится невозможным. Чем позже
водитель начнет поворачивать рулевое колесо и чем ниже будет скорость его
поворота, тем на больший угол успеет повернуться автомобиль. Поэтому поворот
рулевого колеса нужно начинать, как только начнет ощущаться вращение
автомобиля, причем сразу же с наиболее высокой скоростью.
Если рулевое колесо продолжать поворачивать с
постоянной скоростью до момента прекращения заноса, то возникнет занос в
противоположную сторону. Поэтому скорость поворота рулевого колеса необходимо
снижать по мере уменьшения скорости заноса. Обратный поворот рулевого колеса,
как правило, необходимо начинать чуть раньше, чем начнется вращение автомобиля
в противоположную сторону, так как опережение поворота колес относительно угла
поворота автомобиля является основным условном быстрого прекращения и
ликвидации повторного заноса.
Опережающий поворот колес при повторных заносах
возможен в тех случаях, когда водитель знает, где их нейтральное положение. Для
этого необходимо уметь поворачивать рулевое колесо на максимально возможный
угол без изменения точек соприкосновения кистей рук с его ободом. Коррекция
заноса вызывает увеличение радиуса поворота. Поэтому, устранив занос,
необходимо снова повернуть рулевое колесо в сторону поворота, что вызовет новый
занос и все будет повторяться снова, до тех пор, пока скорость автомобиля не
упадет до безопасной для движения по этому повороту или пока автомобиль не
выйдет на прямую. В такой ситуации также лучше сразу выключить сцепление, так
как наличие тяговой или тормозной силы на колесах только ускорит развитие
заноса.
При сносе переднего моста автомобиль сходит с дороги
на наружную сторону, при заносе - на внутреннюю сторону поворота. Однако если
на входе в поворот будет значительно превышена предельная скорость, даже при
возникновении сноса автомобиль, вращаясь, начинает двигаться к наружной кромке
дороги. В этом случае необходимо попытаться остановить его вращение описанными
ранее способами, так как это позволит в некоторой мере самому выбрать место для
съезда с дороги, что поможет снизить тяжесть последствий при дальнейшем
развитии дорожно-транспортного происшествия.
Из всего сказанного никоим образом не следует делать
вывод о том, что на повороте вообще нельзя тормозить. Тормозить на повороте
бывает необходимо довольно часто. Но при этом всегда нужно помнить, что чем
больше скорость и соответственно боковое ускорение автомобиля, тем меньше
величина допустимого при этом замедления.
Когда сумма тормозной и боковой сил станет равной силе
сцепления, начинается снос или занос автомобиля. Поэтому при торможении на
повороте необходимо быть готовым к этому и не забывать, что для ликвидации
сноса или заноса, прежде всего, необходимо растормозить колеса.
Если на пути движения автомобиля на расстоянии,
меньшем, чем остановочный путь, внезапно появляется препятствие, то с помощью
торможения предотвратить наезд будет невозможно. Однако его еще можно избежать,
совершив объезд препятствия. Например, при скорости 80 км/ч минимально
возможный тормозной путь составляет 30 - 35 м, а минимальное расстояние объезда
- 16 - 18 м. При скорости 120 км/ч эта разница становится еще больше: 65 - 90 м
при торможении и 28 - 30 м при объезде. Однако объезд на минимальном расстоянии
может выполнить только хорошо тренированный водитель. Сложность заключается в
том, что при этом маневре заносит практически все автомобили, в том числе и
обладающие на повороте положительным запасом устойчивости. Кроме того, если
скорость заноса высока, возникают курсовые колебания. По данным испытаний
расстояние объезда, при котором возникает занос легковых автомобилей, при
скорости 30 км/ч равно примерно 26 м, при скорости 120 км/ч - примерно 40 м.
Это говорит о том, что когда торможение уже
бесполезно, в ряде случаев может быть выполнен объезд даже не очень опытным
водителем. Однако этому в большинстве случаев мешает боязнь опустить педаль
тормоза при виде неумолимо приближающегося препятствия.
Управление автомобилем при действии внешних
возмущений. Если автомобиль начинает смешаться в сторону под действием бокового
ветра или поперечного наклона дороги, торможение также приводит к
противоположному, чем ожидается, результату. Как и на повороте, в распоряжении
водителя остаются только рулевое колесо, педали управления подачей топлива и
сцепления. При ликвидации отклонений, вызванных внешними силами, очень важно
начать реагировать на их действие раньше, чем начнет отклоняться автомобиль.
Это возможно, когда водитель ощущает действие боковых сил в виде увеличения
усилия на рулевом колесе. Одной из ошибок, часто приводящей к потере
управляемости в этой ситуации, является стремление тут же вернуть автомобиль на
прежнее место при отклонении его к кромке покрытия. Дело в том, что при попытке
быстрее вернуться на середину дороги возникает центробежная сила, направленная
в ту же сторону, что и внешняя сила. Вследствие этого занос возникает раньше,
чем можно было бы ожидать. Поэтому первой задачей при отклонении автомобиля в
сторону под действием внешних сил является прекращение этого отклонения. Только
прекратив его, можно начать плавное возвращение автомобиля к середине дороги.
Если автомобиль попадает колесами одной стороны на
мягкую обочину или в снег, его начинает неудержимо тянуть в кювет. В этом
случае, прежде всего, нужно попытаться удержать автомобиль на прямой и помнить,
что иногда лучше попасть в кювет, чем быть неожиданно выброшенным на встречную
полосу движения при очень энергичных попытках выбраться на дорогу.
4. Органы управления
Органы управления автомобиля по своему функциональному
назначению делятся на две группы. К первой группе относятся органы, с помощью
которых изменяются направление и скорость движения автомобиля: рулевое колесо,
рычаг переключения передач, педаль сцепления, педаль управления дроссельной
заслонкой или подачей топлива, тормозная педаль и рукоятка стояночного тормоза.
Вторая группа включает органы управления вспомогательными устройствами: кнопку
или педаль включения стартера, кнопку управления воздушной заслонкой
карбюратора, включатель зажигания, ручной или ножной переключатель света,
кнопку электрического сигнала, рычаг включения указателей поворота, органы,
управляющие стеклоочистителем, отопителем, вентиляцией, кондиционером, освещением
и др. На автомобилях высокой проходимости, кроме того, имеются рычаг
переключения раздаточной коробки и рычаг включения переднего моста. Специальные
автомобили оборудуются органами для управления дополнительными специальными
механизмами [19,20].
В зависимости от частоты пользования органы управления
можно разделить на постоянные и эпизодические. Рулевое колесо и педаль
управления дроссельной заслонкой или педаль подачи топлива относятся к
постоянным органам управления, а педаль сцепления, тормозная педаль, рычаг
переключения передач, переключатель света, рычаг или кнопка переключателя
указателей поворота, кнопка управления звуковым сигналом и рычаг ручного
тормоза - к эпизодическим. Органы управления могут быть ручными или ножными.
Параметры органов управления автомобиля должны
соответствовать психофизиологическим и анатомическим возможностям водителя и
отвечать эстетическим требованиям. При этом нужно учитывать и принцип,
встречной адаптации, т. е. оптимально возможного приспособления человека к автомобилю.
К конструкции органов управления предъявляются
следующие требования:
ü высокий уровень автоматизации
управления автомобилем;
ü малые время и усилия, необходимые для
выполнения рабочих движений;
ü удобная траектория движения рук и
органов управления;
ü травмобезопасная конструкция органов
управления;
ü обеспечение информативности и удобная
форма рукояток;
ü соответствие эстетическим
требованиям.
Выполнение указанных выше требований достигается путем
автоматизации переключения передач, совмещения нескольких операций в одном
органе управления, применения гидравлических и пневматических приводов,
размещения органов управления в оптимальных зонах рабочих движений водителя,
применения тактильно-гностических и гигиенических форм рукояток.
Рулевое колесо. Рулевое колесо служит для изменения
направления движения автомобиля через рулевой вал, рулевую передачу и рулевой
привод. Тороидный обод колеса смещен относительно оси рулевого вала, вследствие
этого усилие, приложенное к нему, действует на некотором плече, что
обеспечивает небольшие усилия вращения. Кроме обода, рулевое колесо имеет спицы
и ступицу. Размеры и расположение спиц могут быть разнообразными. Конусность
рулевого колеса влияет на величину его смещения вдоль оси вала и зависит от
радиуса рулевого колеса и расчетного усилия.
К рулевому колесу предъявляются два основных
эргономических требования: прилагаемое усилие при его вращении не должно
превышать 30…50 Н для одной руки и 100…110 Н для двух; его угловая скорость
должна обеспечивать надежное управление автомобилем при любой скорости
движения.
Легкость вращения рулевого колеса зависит от
передаточного числа рулевого механизма и диаметра обода. У большинства
современных автомобилей передаточное число рулевых механизмов находится в
пределах 15…40, а диаметр обода - 300…500 мм. Диаметр обода рулевого колеса
тяжелых грузовых автомобилей выбирают ближе к верхнему; пределу, а для легковых
и особенно спортивных - ближе к нижнему пределу.
На некоторых автомобилях устанавливается
гидроусилитель рулевого управления, служащий для уменьшения усилия,
прилагаемого водителем к рулевому колесу, что позволяет точнее управлять
автомобилем и быстрее реагировать на дорожные ситуации, а также уменьшает
утомляемость водителя и повышает безопасность движения. Гидроусилитель частично
гасит колебания кузова, вызываемые неровностями дороги, не мешая водителю
чувствовать ее. При небольших углах поворота рулевого колеса управление
осуществляется без участия гидроусилителя, так как для корректировки движения
требуются небольшие усилия. При возникновении значительных возмущающих внешних
сил, которые действуют на колеса автомобиля, водитель при наличии
гидроусилителя небольшим усилием может удержать ведомые колеса в нужном
положении, что особенно важно при выходе из строя шины одного из передних
колес. Применение гидроусилителя, благодаря которому уменьшается усилие,
прилагаемое к рулевому колесу, дает возможность уменьшить диаметр его обода,
что позволяет улучшить обзорность.
Рычаги и рукоятки. Удобство управления автомобилем во
многом зависит от формы рычагов и рукояток органов управления, их размещения
относительно тела водителя, удаленности друг от друга, направления перемещения,
усилий, которые нужно прикладывать для их перемещения. Учитывая наличие
различных по степени удобства зон в пределах моторных полей водителя, органы
постоянного использования следует размещать в оптимальной рабочей зоне, а
органы эпизодического использования в нормальных и максимальных зонах (рисунок
4.1). На рулевой колонке или рядом с ней располагают рычаги переключения
передач и указатели поворота, кнопку или дужку звукового сигнала. На передней
панели находятся ключ зажигания, рукоятки управления стеклоочистителем и
омывателем стекол, воздушной заслонкой, включателем отопления, вентиляции и т.
п.
Рисунок 4.1 Расположение рычагов и рулевого колеса
грузового автомобиля относительно рабочих зон рук водителя (размеры указаны в
см): а - расположение рычагов управления; б - расположение рулевого колеса; 1 -
оптимальная рабочая зона; 2 - нормальная зона; 3 - максимальная зона
Рисунок 4.2 Зависимость максимального растягивающего
усилия F руки от расстояния S0 между рычагом ручного тормоза и
серединой плеча водителя: 1 - дуга, радиус которой соответствует оптимальному
расстоянию (с физиологической точки зрения) рычага от середины плеча водителя;
2 - дуга, радиус которой соответствует максимальному расстоянию (с
анатомической точки зрения) рычага от середины плеча водителя.
Место расположения рычага переключения передач
зависит, от усилия, необходимого для его перемещения. Вследствие этого рычаг
следует располагать в оптимальной зоне рабочих движений водителя. Рукоятку
стояночного тормоза размещают в этой же зоне с учетом усилия, прикладываемого к
ней. Зависимость развиваемого водителем усилия от места расположения рычага
показана на рисунке 4.2.
Ниже приведены некоторые рекомендации по органам
управления. Полный ход рукоятки ручного тормоза, мм:
ü для легкового автомобиля…………………………….….……..150
ü грузового………………………………….….……..200
Предельные усилия, Н:
ü на тяге рукоятки стояночного
тормоза…………....….……18
ü на рукоятке переключения
передач……………….….….……..6
Основные расстояния, мм:
ü от рукояток рычагов переключения
передач и стояночного тормоза в любом положении до других элементов кабины, не
менее…..….….....40
ü от рукояток прочих рычагов до опорной
поверхности сиденья….…230
ü между рулевым колесом и любыми
деталями кабины, не менее….....100
Указанные выше величины рассчитаны для водителей
среднего роста. Для учета отклонений в росте элементы рабочего места выполняют
регулируемыми (сиденье, педали).
Педали управления. Удобство управления автомобилем и
безопасность движения во многом определяются расположением педалей управления.
При размещении педалей необходимо учитывать частоту и продолжительность
пользования ими, величину прилагаемых усилий, обеспечение безопасности
движения, а также анатомо-физиологические особенности водителя. Усилие,
прокладываемое водителем к педалям, зависит от ее расположения (рисунок 4.3).
Из графика следует, что нога человека развивает наибольшее усилие, если упор
приходится на бедренную часть. Максимальное усилие, равное 1862 Н, достигается
при отклонении упора от вертикального положения на 70°.
Опорная площадка любой педали должна быть расположена
так, чтобы при положении ноги с опорой на пятку углы голеностопного, коленного
и тазобедренного суставов имели оптимальные значения и составляли
соответственно 90…100, 95…135 и 90…120°. Пространственное положение площадки
педали должно соответствовать естественному положению ступни водителя.
Конструкция тормозных механизмов и механизма сцепления
такова, что для воздействия на них требуется приложить большие усилия к педалям
привода; Так, среднее усилие на тормозной педали автомобиля, обеспечивающее
замедление 0,5×g, составляет 294…372,4 Н, максимальное усилие на педали сцепления
достигает 294 Н. Величина усилия зависит от расположения педали по отношению к
сиденью и от смещения площадки педали относительно тела водителя.
Рабочее место, оборудованное регулируемым блоком
педалей при закрепленном сиденье или регулируемым сиденьем с регулируемым
блоком педалей, дает возможность создавать оптимальные условия пользования
педалями для водителей различного роста.

Рисунок 4.3 Зависимость максимального усилия F1, прикладываемого к педали, от
расстояния Sп педали до горизонтальной плоскости
сиденья и угла наклона педали к полу
Травмобезопасность рабочего места водителя. Важнейшая
характеристика рабочего места водителя - его травмобезопасность.
Травмобезопасность обеспечивается применением ряда конструктивных решений,
касающихся компоновки автомобиля, его кузова, сидений, органов рулевого
управления, рычагов, педалей, щитка приборов, ветрового стекла и ряда других
деталей и устройств, составляющих интерьер автомобиля. Кроме того, для
повышения травмобезопасности применяется ряд дополнительных устройств - ремни
безопасности различных типов и конструкций, предохранительные пневматические
подушки, подголовники и другие устройства.
5. Оценка экономической эффективности после
установления ограничения скорости
На улице Аль-Фараби в г. Костанае до установления
предала допустимой скорости было совершено за последние 3 года 36 ДТП (3 чел.
погибло, в том числе один подросток до 16 лет, 30 чел. получили телесные
повреждения, материальный ущерб от повреждения транспортных средств и дорожных
сооружений, порчи и утраты грузов составил 4,2 млн. тенге, а после установления
предела допустимой скорости в течение 1 года было совершено 10 ДТП (6 чел.
получили телесные повреждения, материальный ущерб от повреждения транспортных
средств, дорожных сооружении, порчи и утраты грузов составил 900 тыс. тенге).
Затраты, связанные с установлением предела допустимой
скорости (установка дорожных знаков, дорожный надзор и.т. п.), составили 2 млн.
тенге.
Решение, Для установления верхнего предела допустимой
скорости движения на участке дороги определяем скорость движения 160
автомобилей (рекомендуется брать 150-200 автомобилей). Скорость определяем
приборами. Если отсутствуют приборы, то скорость определяем при помощи
скоростемера или секундомера следующим образом: на участке дороги отмечаем при
помощи вешек, краски или других материалов два створа, расстояние между
которыми 50 или 100 м. Зная расстояние между створами, определяют скорость
каждого автомобиля. [21]
v=3,6×50/t, или v=3,6×100/t,
где t -
время движения автомобиля между створами, с.
Полученные данные скорости 160 автомобилей (исходные
данные) записываем в таблицу 5.1.
В соответствии с графами 1 и 3 строится кривая
распределения (рисунок 5.1), а по данным граф 1 и 4 - кривая накопления
скоростей (рисунок 5.2).
На рисунке 5.1 указано число автомобилей, которые
движутся с указанной в интервалах скоростью.
По рисунку 5.2 можно определить число автомобилей,
скорость которых не превышает 85% автомобилей на данном участке (в нашем
примере v = 60 км/ч).
Народнохозяйственные потери в тыс. тенге.
С = 2160,0×Н1 + 2850,0×Н2+80,8×Н3+М,
где Н1 - число погибших (кроме детей и подростков);
Н2 - число погибших детей и подростков;
Н3 - общее число раненых;
М - материальный ущерб от повреждения транспортных
средств, дорожных сооружений, порчи или утраты грузов.
Таблица 5.1
Распределение автомобилей в интервалах скоростей
|
Интервалы скорости, км/ч
|
Число автомобилей в
интервале скоростей
|
Нарастающий итог, %
|
|
единиц
|
%
|
|
|
40,0…45,0
|
0
|
0
|
0
|
|
45,1…50,0
|
10
|
6,2
|
6,2
|
|
50,1…55,0
|
20
|
12,5
|
18,7
|
|
55,1…60,0
|
65
|
40,7
|
59,4
|
|
60,1…65,0
|
30
|
18,8
|
78,2
|
|
65,1…70,0
|
20
|
12,5
|
90,7
|
|
70,1…75,0
|
10
|
6,2
|
96,9
|
|
75,1…80,0
|
5
|
3,1
|
100,0
|
|
Итого
|
100
|
100
|
|
Рисунок 5.1 Кривая распределения

Рисунок 5.2 Кривая накопления
В нашем примере народнохозяйственные потери от ДТП
определяют в среднем за год:
до введения допустимой скорости движения:
СД =
(21600×3+28500×1+808×30+42000)/3 = 5318,0 тыс. тенге
после введения предела допустимой скорости:
Сп = 80,8×6+900,0=1384,8 тыс. тенге.
Снижение народнохозяйственных потерь после
установления предела скорости:
Эдтп = Сд - Сп = 5318,0-1384,8 = 3933,2 тыс. тенге.
Годовой экономический эффект после введения указанного
мероприятия:
Эг = Эдтп - Ен×K;
Эг = 3933,2 - 0,15×2000,0 =
3633,2 тыс. тенге.
Результаты расчетов сводим в таблицу 5.2.
Таблица 5.2
Экономическая эффективность после установления
ограничения скорости
|
Показатели
|
До установления ограничения
скорости
|
После установления
ограничения скорости
|
|
1. Средние годовые потери
от ДТП, тыс. тенге 2. Снижение потерь после установления предела скорости,
тыс. тенге 3. Капитальные затраты, тыс. тенге (установка дорожных знаков,
дорожный надзор и т. п.) 4. Годовой экономический эффект, тыс. тенге
|
5318 - - -
|
1384.8 3933.2 2000 3633.2
|
6. Экологическое состояние атмосферного воздуха в РК
Из-за низкой
плотности населения природная среда Казахстана, казалось бы, должна быть хорошо
сохранена. Однако это не совсем так. На гигантских, в географическом смысле,
территориях осуществлялась, по сути, волюнтаристская сельскохозяйственная
деятельность, велась нерациональная добыча полезных ископаемых, а вплоть до
начала 90-х гг. проводились испытания различных видов оружия, в том числе и
массового поражения. К сожалению, несмотря на сложность положения, до сих пор
недостаточно остро поднимаются проблемы Восточного Казахстана, Прикаспия, Или-Балхашского,
Каратау-Жамбылского территориально-производственных и Павлодар-Экибастузского
топливно-энергетических комплексов, а также проблемы негативного влияния
автомобильного транспорта на природную среду городов и промышленных регионов.
Ежегодный объем атмосферных загрязнений, производимых в Казахстане,
колеблется в пределах %...7 млн.т, из которых на долю транспортного сектора (в
основном автомобильного транспорта) приходится более одной трети. По данным
национальных природоохранных органов все областные и крупные промышленные
центры РК имеют повышенный уровень загрязнения атмосферного воздуха. Начиная с
80-х гг. для трех городов - Алматы, Тараза и Шымкента - стало характерным
систематическое превышение нормативного показателя индекса загрязнения атмосферы
(ИЗА) более чем в три раза. Доля автомобильного транспорта в загрязнении
атмосферного воздуха городов Казахстана превысила 20…40; городов Актобе,
Атырау, Костанай и Семипалатинск - 50; а города Алматы - 80 % общего. Ежегодное
поступление вредных веществ в атмосферу Алматы оценивается специалистами в
150…250 тыс.т.
К тому же, во-первых, основная деятельность автомобильного транспорта
(АТ) сосредоточена в местах с высокой плотностью населения - городах и
промышленных центрах. Во-вторых, автомобили выбрасывают вредные вещества в
самые нижние, приземные слои атмосферы, туда, где протекает основная
жизнедеятельность человека и где условия для их рассеивания являются
наихудшими. В-третьих, отработавшие газы двигателей внутреннего сгорания (ОГ
ДВС) автомобилей содержат высококонцентрированные токсичные компоненты,
являющиеся основными загрязнителями атмосферы. Время, в течение которого
вредные вещества из ОГ ДВС естественным образом сохраняются в атмосфере,
оценивается от десятка суток до полугода.
ОГ ДВС содержат более 200 токсичных химических соединений, большую часть
из которых составляют различные углеводороды. Ввиду такого многообразия и
сложности идентификации отдельных соединений к рассмотрению обычно принимаются
наиболее представительные компоненты или их группы (таблица 6.1).
Таблица 6.1
Токсичные компоненты ОГ ДВС и их влияние на человека
|
Наименование
|
Воздействие на человека
|
|
Оксид углерода (СО)
|
Препятствует поглощению
кислорода гемоглобином крови. Ослабляет способность к восприятию и мышлению,
замедляет рефлексы. Вызывает сонливость, способствует заболеванию ангиной,
может вызвать потерю сознания и смерть. Пагубно влияет на развитие плода у
беременных и рост соединительных тканей у детей. При совместном с другими
вредными веществами воздействии повышает заболеваемость респираторными и
сосудистыми заболеваниями. Ассоциируется с уменьшением работоспособности и
общим дискомфортом
|
|
Углеводороды (СхНу)
|
Соединения с низким
молекулярным весом вызывают раздражение слизистых оболочек, кашель,
сонливость и симптомы, подобные опьянению. Альдегиды и кетоны раздражают
глаза, вызывают кратковременное раздражение кожи и дыхательных путей, могут
быть канцерогенными. Соединения с высоким молекулярным весом могут
способствовать заболеванию легких, а также оказывать дефекты при рождении,
канцерогенное и мутагенное воздействие
|
|
Оксиды азота (NO2)
|
Могут повысить
восприимчивость к вирусным заболеваниям. Оказывают раздражающее воздействие
на легкие, вызывают бронхиты и пневмонию. Приводят к повышенной
чувствительности аллергетиков и астматиков. Более серьезно воздействуют на
здоровье в сочетании с другими загрязняющими веществами
|
|
Диоксид серы (SO2)
|
Является сильным
раздражителем, обостряет астму, бронхиты и эмфиземы. Вызывает кашель и
ослабление функций легких
|
|
Твердые частицы (РМ)
|
Раздражают слизистые
оболочки и могут быть причиной многих респираторных заболеваний. Мелкие
частицы увеличивают заболеваемость и уровень смертности вследствие дисфункции
дыхательной системы. Существует устойчивая корреляция между содержанием
взвешенных частиц в воздухе и детской смертностью в городах. Взвешенные
частицы имеют способность адсорбировать на своей поверхности канцерогенные
вещества, содержащиеся в отработавших газах двигателей автомобилей
|
|
Соединения свинца
|
Поражают кровеносную,
репродуктивную, нервную и почечную системы Есть подозрения, что они вызывают
повышенную возбудимость и ухудшают способность детей к обучению
|
Помимо прямого негативного воздействия на здоровье человека выбросы от
автотранспорта наносят и ощутимый косвенный ущерб. Так, повышение концентрации
конечного продукта сгорания автомоторного топлива - диоксида углерода (СО2) в
атмосфере приводит к глобальному повышению температуры. По мнению многих
экспертов, это приводит к таким природным катаклизмам последнего времени, как масштабные
пожары в Юго-Восточной Азии, Америке, Сибири, наводнения в Европе и Азии.
Соединения серы и оксиды азота, выбрасываемые в атмосферу с ОГ ДВС,
подвергаются химическим преобразованиям, образуя различные кислоты и соли.
Такие вещества возвращаются на землю в виде «кислотных» дождей. Сейчас уже
доказано, что кислотные осадки наносят чувствительный вред водным экосистемам,
ведут к уничтожению фауны, вызывают повышенную коррозию металлов и разрушение
строительных конструкций. Кроме этого, оксиды азота способствуют окраске
воздуха в коричневый цвет, а в сочетании с различными аэрозолями вызывают
грязевой туман (смог), ухудшая видимость.
Для оценки количества вредных выбросов от автомобилей ЗАО НИИТК
предлагает использовать простейший эмпирический метод расчета, основанный на
количестве израсходованного топлива. В таблице 6.2 представлены удельные
коэффициенты выбросов отдельных токсичных компонентов и их групп (тонн на тонну
израсходованного топлива) в зависимости от вида используемого топлива.
Таблица 6.2
Удельные коэффициенты выбросов вредных веществ ОГ ДВС автомобилей, т/т
|
Вредные вещества
|
Бензин и сжиженный газ
|
Дизельное топливо
|
Природный газ
|
|
Оксид углерода, СО
|
0,42
|
0,047
|
0,09
|
|
Углеводороды, СxНy
|
0,046
|
0,019
|
0,021
|
|
Альдегиды, RCHO
|
0,0012
|
0,0034
|
0,0019
|
|
Твердые частицы (РМ)
|
0,0011
|
0,0092
|
-
|
|
Бензапирен
|
0,1•10-12
|
0,14•10-12
|
0,01•10-12
|
|
Оксиды азота, NOx
|
0,027
|
0,033
|
0,016
|
|
Диоксид серы, SO2
|
0,0015
|
0,022
|
0,0011
|
|
Соединения свинца
|
0,37•10-3
|
-
|
-
|
Главными причинами повышенного загрязнения атмосферного воздуха
автомобильным транспортом являются:
) низкие технико-эксплуатационные показатели парка АТС;
) неудовлетворительное качество автомоторного топлива.
Оба этих фактора влияют на загрязнение атмосферы как непосредственно
(например, из-за неэффективного сжигания топлива), так и косвенно (например,
из-за неоправданно высокого расхода топлива).
Низкие технико-эксплуатационные качества парка АТС в РК складываются из
следующего:
) большой процент в парке транспортных средств грузовых автомобилей и
автобусов, оснащенных бензиновыми двигателями с высоким расходом топлива (в
развитых странах мира соответствующий подвижной состав оснащен дизелями, что
более экономично);
) большой средний срок эксплуатации морально устаревшей автомобильной
техники, разработанной более 30 лет назад;
) неудовлетворительное техническое состояние подвижного состава АТ,
являющееся следствием ослабления государственного регулирования в этой области
(деградация системы технического обслуживания) и нехватки инвестиционных
ресурсов;
) незначительный уровень применения альтернативных, прежде всего,
газовых, топлив, несмотря на то, что в конце 80-х гг. в республике
разворачивалась национальная и региональная программы по их использованию
(природный газ в южных регионах и на северо-западе республики, смесевые
бензометанольные топлива в Карагандинской области);
) неудовлетворительный контроль качества эксплуатационных материалов,
технического состояния и выбросов в атмосферу из-за неадекватности регулирующих
норм, плохой организации работ, отсутствия необходимого
контрольно-измерительного и диагностического оборудования.
7. Охрана труда
.1 Общие требования безопасности
Настоящая инструкция содержит требования по охране труда работников всех
профессий, занятых ремонтом и техническим обслуживанием техники.
Все вновь поступающие на работу работники, независимо от предыдущего
трудового стажа и вида работ, допускаются к работе только после прохождения
медицинского осмотра, вводного и первичного (на рабочем месте) инструктажей с
росписью в журнале регистрации проводимых инструктажей по охране труда. В
дальнейшем работники проходят повторные инструктажи и проверку знаний по охране
труда не реже одного раза в три месяца и периодические медицинские осмотры в
соответствии с приказом Минздрава РК.
Работники, связанные с выполнением работ или обслуживанием объектов
(установок, оборудования) повышенной опасности, а также объектов,
подконтрольных органам государственного надзора, должны ежегодно проходить
курсовое обучение и проверку знаний по безопасности труда.
Работнику, успешно прошедшему проверку знаний, выдается удостоверение на
право самостоятельной работы.
Работники, имеющие перерыв в работе, на которую они нанимаются, более 3-х
лет, а повышенной опасностью - более 12 месяцев, должны пройти обучение и проверку
знаний по безопасности труда до начала самостоятельной работы.
При изменении технологического процесса или модернизации оборудования,
приспособлений, переводе на новую временную или постоянную работу, нарушении
работающим требований безопасности, которое может привести к травме, аварии или
пожару, а также при перерывах в работе более чем на 30 календарных дней,
работник обязан пройти внеплановый инструктаж (с соответствующей записью в
журнале регистрации инструктажей).
К самостоятельной работе допускаются лица, ознакомившиеся с особенностями
и приемами безопасного выполнения работ и прошедшие стажировку в течение 2-14
смен под наблюдением мастера или бригадира (в зависимости от трудового стажа,
опыта и характера работ).
Разрешение на самостоятельное выполнение работ (после проверки полученных
знаний и навыков) дает руководитель работ.
Следует выполнять инструкции по охране труда, правила внутреннего
распорядка, указания руководителя, работников службы охраны труда и техники
безопасности и общественных инспекторов по охране туда,
В процессе производственной деятельности на работников воздействуют
следующие опасные и вредные факторы:
ü движущиеся машины и механизмы;
ü подвижные части производственного оборудования;
ü разрушающиеся материалы конструкции;
ü отлетающие осколки;
ü повышенная или пониженная температура поверхностей
оборудования и материалов;
ü повышенное напряжение электрической сети, при замыкании
которой ток может пройти через тело человека;
ü острые кромки, заусенцы, шероховатая поверхность заготовок,
инструмента и оборудования;
ü расположение рабочего места на высоте относительно
поверхности земли (пола);
ü повышенные запыленность и загазованность рабочей зоны,
ü повышенные уровень шума и вибрации на рабочем месте;
ü повышенная или пониженная влажность воздуха;
ü повышенная или пониженная температура воздуха рабочей зоны;
ü пониженная или повышенная подвижность воздуха;
ü недостаточная освещенность рабочего места;
ü повышенный уровень ультрафиолетового или инфракрасного из
лучения;
ü скользкие поверхности;
ü загрязненные химическими веществами, радиацией и пестицидами
поверхности оборудования, машин и материалов.
Опасные и вредные производственные факторы реализуются в травмы или
заболевания при опасном состоянии машин, оборудования, инструментов, среды и
совершении работниками опасных действий.
Опасное состояние машин, оборудования:
ü открытые вращающиеся и движущиеся части машин и оборудования;
ü скользкие поверхности;
ü захламленность рабочего места посторонними предметами;
ü загрязнение химическими веществами, радиацией и пестицидами
машин, оборудования, инструмента.
Типичные опасные действия работающих, приводящие к травмированию:
использование машин, оборудования, инструмента не по назначению или в
неисправном состоянии;
ü отдых в неустановленных местах;
ü выполнение работ в состоянии алкогольного опьянения;
ü выполнение работ с нарушением правил техники безопасности,
требования инструкций по охране труда и инструкций по эксплуатации
оборудования.
Не допускается техническое обслуживание и ремонт машин и оборудовании,
работающих в зоне радиоактивного, химического загрязнения, загрязнения
пестицидами или другими агрохимикатами, до проведения дезактивации, дегазации и
нейтрализации загрязнения.
Средства индивидуальной защиты следует использовать по назначению и
своевременно ставить в известность администрацию о необходимости их чистки,
стирки, сушки и ремонта. Не допускается их вынос за пределы предприятия
Знайте и соблюдайте правила личной гигиены. Не курите на рабочем месте,
не употребляйте до и во время работы спиртные напитки. Не храните продукты и не
принимайте пищу на рабочих местах.
Выполняйте только ту работу, по которой прошли обучение, инструктаж по
охране труда и к которой допущены руководителем.
На рабочее место не допускаются лица, не имеющие отношения к выполняемой
работе. Не перепоручайте выполнение своей работы другим лицам.
Выполняйте требования знаков безопасности.
Не заходите за ограждения электрооборудования.
Будьте внимательны к предупредительным сигналам, грузоподъемных машин,
автомобилей, тракторов и других видов движущегося транспорта.
Сообщайте руководителю о замеченных неисправностях машин, механизмов,
оборудования, нарушениях требований безопасности и до принятия соответствующих
мер к работе не приступайте.
Если пострадавший сам или с посторонней помощью не может прийти в
лечебное учреждение (потеря сознания, поражение электрические током, тяжелые
ранения и переломы), сообщите руководителю хозяйства (работодателю), который
обязан организовать доставку пострадавшего в лечебное учреждение. До прибытия в
лечебное учреждение окажите пострадавшему первую (доврачебную) помощь и по
возможности успокойте его, так как волнение усиливает кровотечение из ран,
ухудшает защитные функции организма и осложняет процесс лечения.
Работники обязаны знать сигналы оповещения о пожаре, место нахождения
средств для тушения пожара и уметь ими пользоваться. Не допускается
использовать пожарный инвентарь для других целей.
Не загромождайте проходы и доступ к противопожарному оборудованию.
Засыпайте песком пролитые на землю топливо и смазочные материалы.
Пропитанный нефтепродуктами песок немедленно уберите и вывези те в место,
согласованное с санэпидстанцией.
Убирайте использованный обтирочный материал в специальные металлические
ящики с крышками.
Не разводите огонь в секторах хранения с.х. техники на территории
машинного двора и в помещениях.
Не храните на рабочем месте легковоспламеняющиеся и горючие жидкости,
кислоты и щелочи в количествах, превышающих сменную потребность в готовом к
употреблению виде.
При возникновении пожара в самой электроустановке или вблизи нее, в
первую очередь, до прибытия пожарных произведите отключение электроустановки от
сети. Если это невозможно, то попытайтесь перерезать8
провода (последовательно, по одному) инструментом с изолированными
ручками.
При тушении пожара, в первую очередь, гасите очаг воспламенения, При
пользовании пенным огнетушителем направляйте струю под углом 40-45 град, для
избежание разбрызгивания жидкости, тушение начинайте с одного края, после чего
последовательно перемещайтесь к другому краю очага воспламенения.
Для тушения небольших очагов пожара, легковоспламеняющихся и горючих
жидкостей, а также твердых горючих веществ и материалов применяйте пенные
огнетушители; ручные типа ОХП-10, ОП-М, ОП-9МН;
воздушно-пенные типа ОВП-5, ОВП-10; мобильные, перевозимые на специальных
тележках, воздушно-пенные типа ОВП-100, ОВП-250, ОПТ-100. При их отсутствии
забрасывайте очаг возгорания песком, покройте войлоком или тушите каким-либо
другим способом.
Для тушения горючих веществ и материалов, которые нельзя ту шить водой
или пеной, а также электроустановок, находящихся под напряжением, применяйте
углекислотные ручные огнетушители, типа ОУ-2.ОУ-5, УП-2М, ОУ-8, ОУБ-ЗА, ОУБ-7А;
передвижные углекислотные огнетушители типа ОУ-25, ОУ-80, ОУ-100, ОСУ-5;
порошковые огнетушители типа:
ручные - ОП-1, ОП-2, ОП-5, ОП-10. ОПС-6, ОПС-10;передвижные- ОП-100,
ОП-290, СИ-2, СИ-120, СЖБ-50, СЖ5-150, ОПА-50, ОПА-100. Допускается
использовать сухой, без примесей, песок. При пользовании порошковыми
огнетушителями не направляйте струю порошка на раскаленные поверхности -
возможен взрыв.
Не применяйте для тушения пожара в электроустановке, находящейся под
напряжением, химические пенные или химические воздушно- пенные огнетушители.
Рабочий, допустивший нарушение требований инструкций по охране труда,
может быть привлечен к дисциплинарной ответственности согласно правилам
внутреннего распорядка предприятия, а, если эти нарушения связаны с причинением
материального ущерба предприятию, рабочий несет и материальную ответственность
в установленном порядке.
8. Пожарная безопасность
Пожары наносят громадный материальный ущерб и в ряде случаев
сопровождаются гибелью людей. Поэтому защита от пожаров является важнейшей
обязанностью каждого члена общества и проводится в общегосударственном
масштабе.
Противопожарная защита имеет своей целью изыскание наиболее эффективных,
экономически целесообразных и технически обоснованных способов и средств предупреждения
пожаров и их ликвидации с минимальным ущербом при наиболее рациональном
использовании сил и технических средств тушения.
Пожарная безопасность - это состояние объекта, при котором исключается
возможность пожара, а в случае его возникновения используются необходимые меры
по устранению негативного влияния опасных факторов пожара на людей , сооружения
и материальных ценностей
Пожарная безопасность может быть обеспечена мерами пожарной профилактики
и активной пожарной защиты. Пожарная профилактика включает комплекс
мероприятий, направленных на предупреждение пожара или уменьшение его
последствий. Активная пожарная защита - меры, обеспечивающие успешную борьбу с пожарами или
взрывоопасной ситуацией.
Совокупность сил и средств, а также мер правового, организационного,
экономического, социального и научно-технического характера образуют систему
обеспечения пожарной безопасности.
Основными элементами системы обеспечения пожарной безопасности являются
органы государственной власти, органы местного самоуправления, предприятия и
граждане, принимающие участие в обеспечении пожарной безопасности в
соответствии с законодательством Республики Казахстан.
8.1 Причины пожаров на производственных объектах
Производственные объекты отличаются повышенной пожарной опасностью, так
как характеризуется сложностью производственных процессов; наличием
значительных количеств ЛВЖ и ГЖ, сжиженных горючих газов, твердых сгораемых
материалов; большой оснащенностью электрическими установками и другое.
Причины:
) Нарушение технологического режима - 33%.
) Неисправность электрооборудования - 16 %.
) Плохая подготовка к ремонту оборудования - 13%.
) Самовозгорание промасленной ветоши и других материалов - 10%
Источниками воспламенения могут быть открытый огонь технологических
установок, раскаленные или нагретые стенки аппаратов и оборудования, искры
электрооборудования, статическое электричество, искры удара и трения деталей
машин и оборудования и др.
А также нарушение норм и правил хранения пожароопасных материалов,
неосторожное обращение с огнем, использование открытого огня факелов, паяльных
ламп, курение в запрещенных местах , невыполнение противопожарных мероприятий
по оборудованию пожарного водоснабжение, пожарной сигнализации, обеспечение
первичными средствами пожаротушения и др.
Как показывает практика, авария даже одного крупного агрегата,
сопровождающаяся пожаром и взрывом, например, в химической промышленности они
часто сопутствуют один другому, может привести к весьма тяжким последствиям не
только для самого производства и людей его обслуживающих, но и для окружающей
среды. В этой связи чрезвычайно важно правильно оценить уже на стадии
проектирования пожаро- и взрывоопасность технологического процесса, выявить
возможные причины аварий, определить опасные факторы и научно обосновать выбор
способов и средств пожаро- и взрывопредупреждения и защиты.
Немаловажным фактором в проведении этих работ является знание процессов и
условий горения и взрыва, свойств веществ и материалов, применяемых в
технологическом процессе, способов и средств защиты от пожара и взрыва.
Мероприятия по пожарной профилактике разделяются на организационные,
технические, режимные и эксплуатационные.
Организационные мероприятия: предусматривают правильную эксплуатацию
машин и внутризаводского транспорта, правильное содержание зданий, территории,
противопожарный инструктаж.
Технические мероприятия: соблюдение противопожарных правил и норм при
проектировании зданий, при устройстве электропроводов и оборудования,
отопления, вентиляции, освещения, правильное размещение оборудования.
Режимные мероприятия - запрещение курения в неустановленных местах, запрещение сварочных и
других огневых работ в пожароопасных помещениях и тому подобное.
Эксплуатационные мероприятия - своевременная профилактика, осмотры, ремонты и испытание
технологического оборудования.
.2 Права и обязанности предприятий
Законом "О пожарной безопасности" предприятиям предоставлены
следующие права;
создавать, реорганизовывать и ликвидировать в установленном порядке
подразделения пожарной охраны, которые они содержат за счет собственных
средств, в том числе на основе договоров с Государственной противопожарной
службой;
вносить в органы государственной власти и органы местного самоуправления
предложения по обеспечению пожарной безопасности;
проводить работы по установлению причин и обстоятельств пожаров,
происшедших на предприятиях;
устанавливать меры социального и экономического стимулирования
обеспечения пожарной безопасности;
получать информацию по вопросам пожарной безопасности, в том числе в
установленном порядке от органов управления и подразделений пожарной охраны.
На предприятия законом также возлагаются следующие обязанности:
соблюдать требования пожарной безопасности, а также выполнять
предписания, постановления и иные законные требования должностных лиц пожарной
охраны;
разрабатывать и осуществлять меры по обеспечению пожарной безопасности;
проводить противопожарную пропаганду, а также обучать своих работников
мерам пожарной безопасности;
включать в коллективный договор (соглашение) вопросы пожарной
безопасности;
содержать в исправном состоянии системы и средства противопожарной
защиты, включая первичные средства тушения пожаров, не допускать их
использования не по назначению;
создавать и содержать в соответствии с установленными нормами органы управления
и подразделения пожарной охраны, в том числе на основе договоров с
Государственной противопожарной службой;
оказывать содействие пожарной охране при тушении пожаров, установлении
причин и условий их возникновения и развития, а также при выявлении лиц,
виновных в нарушении требований пожарной безопасности и возникновении пожаров;
предоставлять в установленном порядке при тушении пожаров на территориях
предприятий необходимые силы и средства, горюче-смазочные материалы, а также
продукты питания и места отдыха для личного состава пожарной охраны,
участвующего в выполнении боевых действий по тушению пожаров, и привлеченных к
тушению пожаров сил;
обеспечивать доступ должностным лицам пожарной охраны, при осуществлении
ими служебных обязанностей на территории, в здания, сооружения и на иные
объекты предприятий;
предоставлять по требованию должностных лиц Государственной
противопожарной службы сведения и документы о состоянии пожарной безопасности
на предприятиях, в том числе о пожарной опасности производимой ими продукции, а
также о происшедших на их территории пожарах и их последствиях;
незамедлительно сообщать в пожарную охрану о возникших пожарах,
неисправностях имеющихся систем и средств противопожарной защиты, об изменении
состояния дорог и проездов.
Согласно Правилам пожарной безопасности на каждом предприятии приказом
(инструкцией) должен быть установлен соответствующий их пожарной опасности
противопожарный режим в том числе:
определены и оборудованы места для курения;
определены места и допустимое количество единовременно находящихся в
помещениях сырья, полуфабрикатов и готовой продукции;
установлен порядок уборки горючих отходов и пыли, хранения промасленной
спецодежды;
определен порядок обесточивания электрооборудования в случае пожара и по
окончании рабочего дня;
регламентированы:
порядок проведения временных огневых и других пожароопасных работ;
порядок осмотра и закрытия помещений после окончания работы;
действия работников при обнаружении пожара;
определены порядок и сроки прохождения противопожарного инструктажа и
занятий по пожарно-техническому минимуму, а также назначены ответственные за их
проведение.
В зданиях и сооружениях (кроме жилых домов) при единовременном нахождении
на этаже более 10 человек должны быть разработаны и на видных местах вывешены
планы (схемы) эвакуации людей в случае пожара, а также предусмотрена система
(установка) оповещения людей о пожаре.
Руководитель объекта с массовым пребыванием людей (50 человек и более) в
дополнение к схематическому плану эвакуации людей при пожаре обязан разработать
инструкцию, определяющую действия персонала по обеспечению безопасной и быстрой
эвакуации людей, по которой не реже одного раза в полугодие должны проводиться
практические тренировки всех задействованных для эвакуации работников.
Для объектов с ночным пребыванием людей (детские сады, школы-интернаты,
больницы и т.п.) в инструкции должны предусматриваться два варианта действий: в
дневное и в ночное время.
Руководители предприятий, на которых применяются, перерабатываются и
хранятся опасные (взрывоопасные) сильнодействующие ядовитые вещества, обязаны
сообщать подразделениям пожарной охраны данные о них, необходимые для
обеспечения безопасности личного, состава, привлекаемого для тушения пожара и
проведения первоочередных аварийно-спасательных работ на этих предприятиях.
Территория предприятий в пределах противопожарных разрывов между
зданиями, сооружениями и открытыми складами, должна своевременно очищаться от
горючих отходов, мусора, тары, опавших листьев, сухой травы и т.п.
Горючие отходы, мусор и т.п. следует собирать на специально выделенных
площадках в контейнеры или ящики, а затем вывозить.
Противопожарные разрывы между зданиями и сооружениями, штабелями леса,
пиломатериалов, других материалов и оборудования не разрешается использовать
под складирование материалов, оборудования и тары, для стоянки транспорта и
строительства (установки) зданий и сооружений.
Дороги, проезды, подъезды и проходы к зданиям, сооружениям, открытым
складам и водоисточникам, используемые для пожаротушения, подступы к
стационарным пожарным лестницам и пожарному инвентарю должны быть всегда
свободными, содержаться в исправном состоянии, а зимой быть очищенными от снега
и льда.
Для всех производственных и складских помещений должны быть определены
категории взрывопожарной и пожарной опасности, а также класс зоны по Правилам
устройства электроустановок, которые надлежит обозначать на дверях помещений.
Около оборудования, имеющего повышенную пожарную опасность, следует
вывешивать стандартные знаки (аншлаги, таблички) безопасности.
Одно из условий обеспечения пожаро- и взрывобезопасности любого
производственного процесса - ликвидация возможных источников воспламенения.
.3 Пути эвакуации
При проектировании зданий необходимо предусмотреть безопасную эвакуацию
людей на случай возникновения пожара. При возникновении пожара люди должны
покинуть здание в течение минимального времени, которое определяется кратчайшим
расстоянием от места их нахождения до выхода наружу.
Число эвакуационных выходов из зданий, помещений и с каждого этажа зданий
определяется расчетом, но должно составлять не менее двух. Эвакуационные выходы
должны располагаться рассредоточено. При этом лифты и другие механические
средства транспортирования людей при расчетах не учитывают. Ширина участков
путей эвакуации должна быть не менее 1 м, а дверей на путях эвакуации не менее
0.8м. Ширина наружных дверей лестничных клеток должна быть не менее ширины
марша лестницы, высота прохода на путях эвакуации - не менее 2 м. При
проектировании зданий и сооружений для эвакуации людей должны предусматриваться
следующие виды лестничных клеток и лестниц: незадымляемые лестничные клетки
(сообщающиеся с наружной воздушной зоной или оборудованные техническими
устройствами для подпора воздуха); закрытые клетки с естественным освещением
через окна в наружных стенах; закрытые лестничные клетки без естественного
освещения; внутренние открытые лестницы (без ограждающих внутренних стен);
наружные открытые лестницы. Для зданий с перепадами высот следует
предусматривать пожарные лестницы.
9. Охрана окружающей среды
.1 Основные направления охраны окружающей среды в промышленности,
энергетике и на транспорте
век принес человечеству немало благ, связанных с бурным развитием
научно-технического прогресса, и в то же время поставил жизнь на Земле на грани
экологической катастрофы. Рост населения, интенсификация добычи и выбросов,
загрязняющих Землю, приводят к коренным изменениям в природе и отражаются на
самом существовании человека. Часть из таких изменений чрезвычайно сильна и
настолько широко распространена, что возникают глобальные экологические
проблемы. Имеются серьезные проблемы загрязнения (атмосферы, вод, почв),
кислотных дождей, радиационного поражения территории, а также утраты отдельных
видов растений и живых организмов, оскудения биоресурсов, обезлесения и
опустынивания территорий.
Проблемы возникают в результате такого взаимодействия природы и человека,
при котором антропогенная нагрузка на территорию (ее определяют через
техногенную нагрузку и плотность населения) превышает экологические возможности
этой территории, обусловленные главным образом ее природно-ресурсным
потенциалом и общей устойчивостью природных ландшафтов (комплексов, геосистем)
к антропогенным воздействиям.
Основные источники загрязнения атмосферного воздуха территории нашей
страны - машины и установки, использующие серосодержащие угли, нефть, газ.
Значительно загрязняют атмосферу автомобильный транспорт, предприятия черной и
цветной металлургии, нефтегазоперерабатывающей, химической и лесной
промышленности. Большое количество вредных веществ в атмосферу поступает с
выхлопными газами автомобилей, причем их доля в загрязнении воздуха постоянно
растет.
С ростом промышленного производства, его индустриализации, средозащитные
мероприятия, базирующиеся на нормативах ПДК и их производных, становятся
недостаточными для снижения уже образовавшихся загрязнений. Поэтому естественно
обращение к поиску укрупненных характеристик, которые, отражая реальное
состояние сред, помогли бы выбору экологически и экономически оптимального варианта,
а в загрязненных (нарушенных) условиях - определили очередность
восстановительно-оздоровительных мероприятий.
С переходом на путь интенсивного развития экономики важная роль отводится
системе экономических показателей, наделенных важнейшими функциями
хозяйственной деятельности: плановой, учетной, оценочной, контрольной и
стимулирующей. Как всякое системное образование, представляющее собой не
произвольную совокупность, а взаимосвязанные элементы в определенной
целостности, экономические показатели призваны выражать конечный результат с
учетом всех фаз воспроизводственного процесса.
Одной из важных причин увеличения природоемкости экономики стал
превышающий все допустимые нормативы износ оборудования. В условиях
продолжающейся эксплуатации такого оборудования резко увеличивается вероятность
экологических катастроф.
Ущерб, наносимый природе при производстве и потреблении продукции, -
результат нерационального природопользования. Возникла объективная
необходимость установления взаимосвязей между результатами хозяйственной
деятельности и показателями экологичности выпускаемой продукции, технологией ее
производства. Это в соответствии с законодательством требует от трудовых
коллективов дополнительных затрат, которые необходимо учитывать при
планировании. На предприятии целесообразно разграничивать затраты на охрану
окружающей среды, связанные с производством продукции и с доведением продукта
до определенного уровня экологического качества, либо с заменой его другим,
более экологичным. Существует связь между качеством продукции и качеством
окружающей среды: чем выше качество продукции (с учетом экологической оценки
использования отходов и результатов природоохранной деятельности в процессе
производства), тем выше качество окружающей среды.
Преодолением негативных воздействий с помощью обоснованной системы норм и
нормативов, с увязкой расчетных методов и средозащитных мероприятий; разумным
(комплексным, экономичным) использованием природных ресурсов, отвечающим
экологическим особенностям определенной территории; экологической ориентации
хозяйственной деятельности, планирование и обоснование управленческих решений,
выражающихся в прогрессивных направлениях взаимодействия природы и общества,
экологической аттестации рабочих мест, технологии выпускаемой продукции.
Обоснование экологичности представляется неотъемлемой частью системы
управления, влияющей на выбор приоритетов в обеспечении народного хозяйства
природными ресурсами и услугами в пределах намечаемых объемов потребления.
Различие производственных интересов и отраслевых заданий определяет особенности
взглядов специалистов на проблему экологизации производств, применяемой и
создаваемой техники и технологии. Предпринимаются попытки на основе единого
методического подхода, расчетом частных и обобщающих показателей выразить
взаимосвязь натуральных и стоимостных характеристик в принятии экономически
целесообразного и экологически обусловленного (приемлемого) решения.
Приоритетность натуральных параметров, показателей отвечает потребностям
ресурсообеспечения общественного производства. Стоимостные показатели должны
отражать результативность усилий по снижению (или повышению) техногенной
нагрузки на природу. С их помощью производится расчет экологического ущерба и
оценивается эффективность мер по стабилизации режима природопользования.
Надо сказать, что кроме этого принимаются и такие меры, как: -
обеспечение организации производства нового, более совершенного оборудования и
аппаратуры для очистки промышленных выбросов в атмосферу от вредных газов,
пыли, сажи и других веществ; проведение соответствующих научных исследований и
опытно-конструкторской работ по созданию более совершенной аппаратуры и
оборудования для защиты атмосферного воздуха от загрязнения промышленными
выбросами; осуществление на предприятиях и организациях монтажа и наладки
газоочистного и пылеулавливающего оборудования и аппаратуры; осуществление
государственного контроля за работой газоочистных и пылеулавливающих установок
на промышленных предприятиях.
Развитие современного производства, и, прежде всего промышленности,
базируется в значительной степени на использовании ископаемого сырья. Среди
отдельных видов ископаемых ресурсов на одно из первых мест по
народнохозяйственному значению следует поставить источники топлива и
электроэнергии. Особенностью энергетического производства является
непосредственное воздействие на природную среду в процессе извлечения топлива и
его сжигания, причем происходящие изменения природных компонентов являются
весьма наглядными.
Время, когда природа казалась неисчерпаемой, миновало. Грозные симптомы
разрушительной деятельности человека с особой силой проявились пару десятилетий
назад, вызвав в некоторых странах энергетический кризис. Стало ясно, что
ресурсы энергоносителей ограничены. Это также относится и ко всем другим полезным
ископаемым.
Между тем, по официальным оценкам, с прошлого года в нашей стране начался
невиданный прирост производства. Если так будет продолжаться и дальше, то к
2015 году объемы производства увеличатся в 2,8 раза. Уровень энергопотребления
при этом возрастет в полтора раза. При сохранении нынешних объемов поставок
энергоносителей наша энергетическая система от такого прироста производства
просто рухнет. По оценкам специалистов, учитывая нынешние темпы увеличения ВВП,
ситуация в энергетической отрасли резко обострится уже в ближайшее время.
Таким образом, подводя итог, следует отметить, что основными
направлениями государственной политики Республики Казахстан в области охраны
окружающей среды являются:
ü обеспечение прав граждан на благоприятную окружающую среду и
возмещение вреда, причиненного нарушением этого права;
ü совершенствование государственного управления в области
охраны окружающей среды;
ü научное обеспечение охраны окружающей среды;
ü создание правового и экономического механизмов, стимулирующих
рациональное использование природных ресурсов;
ü рациональное использование природных ресурсов;
совершенствование системы охраны окружающей среды и природопользования;
создание сети особо охраняемых природных территорий;
ü обеспечение сохранения биологического и ландшафтного
разнообразия; обеспечение непрерывного функционирования Национальной системы
мониторинга окружающей среды в Республике;
ü проведение государственной экологической экспертизы;
ü информирование граждан о состоянии окружающей среды и мерах
по ее охране;
ü организация и развитие системы образования, воспитания в
области охраны окружающей среды и формирование экологической культуры, а также
подготовка и переподготовка специалистов для деятельности в области охраны
окружающей среды;
ü оказание содействия общественным объединениям, осуществляющим
свою деятельность в области охраны окружающей среды;
ü привлечение граждан, общественных объединений к охране
окружающей среды и контролю за ее состоянием;
ü международное сотрудничество в области охраны окружающей
среды.
.2 Экологические требования при проектировании, строительстве и
эксплуатации промышленных объектов
При размещении зданий, сооружений и иных объектов должно быть обеспечено
выполнение требований в области охраны окружающей среды с учетом ближайших и
отдаленных экологических, экономических, демографических и иных последствий
эксплуатации указанных объектов и соблюдением приоритета сохранения
благоприятной окружающей среды, биологического разнообразия, рационального
использования и воспроизводства природных ресурсов. Выбор мест размещения
зданий, сооружений и иных объектов осуществляется с соблюдением требований
законодательства Республики Казахстан.
При разработке проектов строительства, реконструкции, консервации,
демонтажа и сноса зданий, сооружений и иных объектов должны учитываться
нормативы допустимой антропогенной нагрузки на окружающую среду,
предусматриваться мероприятия по предупреждению и устранению загрязнения
окружающей среды, а также способы обращения с отходами, применяться
ресурсосберегающие, малоотходные, безотходные технологии, способствующие охране
окружающей среды, восстановлению природной среды, рациональному использованию и
воспроизводству природных ресурсов. Уменьшение стоимости либо исключение из
проектных работ и утвержденного проекта планируемых мероприятий по охране
окружающей среды при проектировании строительства, реконструкции, консервации,
демонтажа и сноса зданий, сооружений и иных объектов запрещаются. Проект
строительства, реконструкции, консервации, демонтажа или сноса зданий,
сооружений и иных объектов, подлежащий государственной экологической экспертизе
и не получивший положительного заключения, не подлежит утверждению, и работы по
его реализации не финансируются.
Строительство и реконструкция зданий, сооружений и иных объектов должны
осуществляться по утвержденному проекту при наличии положительного заключения
государственной экологической экспертизы с соблюдением требований в области
охраны окружающей среды, а также санитарных, противопожарных, строительных и
иных требований законодательства Республики Казахстан. Строительство и
реконструкция зданий, сооружений и иных объектов до утверждения проекта и до
отвода земельного участка в натуре, а также изменение утвержденного проекта в
ущерб требованиям в области охраны окружающей среды запрещаются. При
осуществлении строительства и реконструкции зданий, сооружений и иных объектов
принимаются все предусмотренные проектом меры по охране окружающей среды,
благоустройству территории, охране памятников истории и культуры, сбору и иному
обращению с отходами и иные меры по предотвращению вредного воздействия на
окружающую среду.
В ходе строительства и реконструкции зданий, сооружений и иных объектов
осуществляется государственный, ведомственный и производственный контроль в
области охраны окружающей среды в порядке, установленном законодательством
Республики Казахстан. Ввод в эксплуатацию зданий, сооружений и иных объектов
производится при условии выполнения в полном объеме предусмотренных проектом
работ по охране окружающей среды, благоустройству территорий в соответствии с
законодательством Республики Казахстан. Ввод в эксплуатацию зданий, сооружений
и иных объектов, не оснащенных приборами учета и контроля, техническими
средствами по очистке, обезвреживанию выбросов и сбросов загрязняющих веществ,
использованию или обезвреживанию отходов, обеспечивающими выполнение
установленных требований в области охраны окружающей среды, запрещается.
Руководители и члены комиссий по приемке в эксплуатацию зданий, сооружений и иных
объектов несут в соответствии с законодательством Республики Казахстан
ответственность за приемку в эксплуатацию зданий, сооружений и иных объектов,
не соответствующих требованиям в области охраны окружающей среды. Юридические
лица и граждане, осуществляющие эксплуатацию зданий, сооружений и иных
объектов, обязаны соблюдать технологические нормативы и иные требования в
области охраны окружающей среды. Юридические лица и граждане, осуществляющие
эксплуатацию зданий, сооружений и иных объектов, обеспечивают соблюдение
нормативов качества окружающей среды на основе применения технических средств и
технологий обезвреживания и использования отходов производства, обезвреживания
выбросов и сбросов загрязняющих веществ, а также иных технологий,
обеспечивающих выполнение требований в области охраны окружающей среды.
При эксплуатации зданий, сооружений и иных объектов юридические лица и
индивидуальные предприниматели обязаны вести экологический паспорт предприятия.
Под экологическим паспортом предприятия понимается документ, включающий данные
по использованию юридическим лицом или индивидуальным предпринимателем,
осуществляющими хозяйственную и иную деятельность, ресурсов (природных и
вторичных) и определению влияния производства на окружающую среду. Порядок
ведения экологического паспорта предприятия устанавливается Министерством
природных ресурсов и охраны окружающей среды Республики Казахстан.
.3 Выводы об охране окружающей среды в Казахстане
Правовая охрана окружающей человека среды обеспечивается по двум основным
направлениям - в отраслях народного хозяйства (в промышленности сельском
хозяйстве, энергетике, в военной деятельности, на транспорте и др.), а также в
пределах отдельных территорий (городских и сельских поселений и др.). В
отраслях экономики правовая охрана окружающей человека среды осуществляется на
всех стадиях хозяйственного процесса: проектирования, размещения, строительства
и ввода в эксплуатацию предприятий, сооружений и других производственных
объектов; при эксплуатации указанных объектов, включая выпуск готовой
продукции, а также выброс вредных веществ и размещение производственных и
других отходов. На всех этапах производственного процесса важными элементами
правовой охраны окружающей человека среды являются соблюдение требований
экологического законодательства и экологический контроль.
При размещении, технико-экономическом обосновании проекта,
проектировании, строительстве и реконструкции, вводе в эксплуатацию,
эксплуатации предприятий, сооружений в промышленности, сельском хозяйстве, на
транспорте, в энергетике, водном, коммунально-бытовом хозяйстве, прокладке
коммуникаций, линий связи, электропередач, трубопроводов, каналов и других
объектов, оказывающих прямое или косвенное влияние на состояние окружающей
природной среды, должны выполняться требования экологической безопасности и
охраны здоровья населения, предусматриваться мероприятия по охране природы,
рациональному использованию и воспроизводству природных ресурсов и оздоровлению
окружающей среды. Вместе с тем правовая охрана окружающей человека среды имеет
свои характерные направления применительно к отдельным стадиям
производственного процесса.
На стадии размещения, проектирования, строительства и ввода в
эксплуатацию основное значение приобретают следующие направления:
установление нормативов качества окружающей среды: предельно допустимых
концентраций загрязняющих веществ в воздухе, воде и почве; предельно допустимых
уровней вредных физических воздействий: шума, вибрации, вредных излучений,
магнитных полей и др.;
обеспечение производственных объектов очистными сооружениями и
устройствами по охране водоемов, почв, атмосферного воздуха от загрязнения
сточными водами и промышленными выбросами. Запрещается ввод в эксплуатацию
объектов, не обеспеченных современными технологиями, сооружениями и установками
по очистке, обезвреживанию и утилизации вредных отходов, выбросов и сбросов до
уровня установленных нормативов, средствами контроля за загрязнением окружающей
среды, без завершения работ по рекультивации земель, оздоровлению окружающей
среды;
осуществление оценки воздействия на окружающую среду намечаемой
хозяйственной деятельности с целью выявления и предотвращения возможных
неблагоприятных ее последствий - экологических, социальных, демографических,
экономических и других и принятия соответствующих мер по их предупреждению;
проведение государственной, а при необходимости и общественной,
экологической экспертизы проектов размещения, строительства и реконструкции
хозяйственных объектов, внедрения новых технологий, оборудования, материалов,
продукции и т. д.
На стадии эксплуатации производственных объектов основными направлениями
правовой охраны окружающей среды являются:
соблюдение нормативов предельно допустимых выбросов (сбросов)
загрязняющих веществ в окружающую среду и других условий, обеспечивающих охрану
окружающей среды и здоровья населения;
предупреждение и ограничение вредных воздействий производственного шума,
вибрации, магнитных полей и других физических факторов;
предупреждение и устранение загрязнения окружающей среды, снижение,
обезвреживание и очистка вредных выбросов путем обеспечения эффективной работы
очистных сооружений, а также средств контроля за загрязнением;
выброс (сброс) вредных веществ в окружающую среду только в соответствии с
разрешениями, выдаваемыми компетентными государственными органами;
рациональное использование природных ресурсов, соблюдение установленных
лимитов природопользования (водопотребления, добычи полезных ископаемых, лесных
ресурсов и др.), ресурсосбережение, использование альтернативных источников
энергии и материалов, вторичного сырья;
соблюдение правил обращения с химическими, биологическими и
радиоактивными веществами при их производстве, хранении, транспортировке и
применении. Запрещается применение токсичных химических препаратов, не
подвергающихся распаду, активно воздействующих на организм человека и
окружающую природную среду, а также применение и разведение биологических
объектов (микроорганизмов), не свойственных природе данного региона и
полученных искусственным путем, без эффективных мер предупреждения их
неконтролируемого размножения.
Так, правовая охрана окружающей среды на транспорте предполагает
проведение мероприятий по:
рациональному размещению транспортных потоков, вывод их за пределы жилой
зоны, устройство транзитных дорог за чертой города;
установлению и соблюдению нормативов для двигателей, усиление контроля за
их выполнением, техническим состоянием транспортных средств;
снижению токсичности и нейтрализации вредных веществ, содержащихся в
выхлопных газах автомобилей и других транспортных средств;
разработке и внедрению новой технологии, связанной с переводом транспорта
на более экологически чистые виды топлива (железнодорожного - на электрическую
тягу, автомобильного - на газ, электроэнергию, водородное топливо и др.).
Заключение
. Повышение безопасности автомобиля, в том числе его управляемости,
является одной из главных и сложных задач автомобильной промышленности, служб
эксплуатации и регулирования движения. Совершенствование эксплуатационных
свойств автомобиля, направленное на предупреждение или хотя бы снижение тяжести
травм при ДТП, проведено в настоящей дипломной работе по направлению улучшения
управляемости, устойчивости и надежности автомобиля, улучшению условий обитания
в кабине автомобиля.
. Выбор параметров автомобиля, обеспечивающих наилучшие характеристики
управляемости и взаимосвязанной с ней устойчивости является задачей
оптимизации. Исходя из этого:
а) определены силы, действующие на автомобиль при движении по круговой
траектории с постоянной малой скоростью;
б) рассмотрено явление увода автомобильного колеса, связанного с боковой
эластичностью автомобильного колеса, в значительной степени влияющей на
управляемость и устойчивость автомобиля;
в) из рассмотрения схемы поворота автомобиля с эластичными колесами
построен график управляемости автомобиля, связывающий между собой параметры
(радиус поворота и скорость автомобиля, угол поворота управляемых колес,
центробежную силу, разность углов увода задних и передних колес автомобиля)
движения автомобиля по кривой, а также определено выражение для критической
скорости по условиям управляемости , позволяющее определить три случая
возникновения соответственно нейтральной, недостаточной и избыточной
поворачиваемости автомобиля.
. Разработана расчетная схема анализа маневра для оценки управляемости
автомобиля, а также на этой основе определены параметры движения автомобиля для
маневров входа и выхода из поворота и смены полосы движения.
. Для количественной оценки шинной поворачиваемости автомобиля предложен
коэффициент поворачиваемости, значения которого определены для некоторых
автомобилей СНГ, свидетельствующие о том, что большинство автомобилей имеют
недостаточную поворачиваемость в нагруженном состоянии, и избыточную шинную
поворачиваемость при полной нагрузке автомобиля.
. Рассмотрены схемы движения автомобилей с зависимой рессорной и
независимой рычажной подвеской, имеющих избыточную и недостаточную креновую
поворачиваемость, которая соответственно может усиливать или ослаблять влияние
шинной поворачиваемости.
. Приведены эмпирические формулы для определения коэффициента маневра при
смене полосы движения.
. Анализ влияния технического состояния автомобиля на его устойчивость и
управляемость позволил выявить:
а) влияние износа протектора на коэффициент сцепления и коэффициент
сопротивления шины уводу;
б) зависимость углового отклонения автомобиля от скорости при торможении
автомобиля, когда неисправен один передний или один задний тормозной механизм;
в) предельные значения свободного хода рулевого колеса и гримерные
значения усилий на ободе рулевого колеса у различных типов автомобилей;
г) схему поворота и изменение поперечного смещения у автомобиля при
заклинивании рулевого управления;
д) влияние дисбаланса колес на амплитуду колебаний и усилия в рулевом
приводе;
ж) изменение вертикальных нагрузок на колеса легкового автомобиля на
аварийном участке дороги.
. Из рассмотрения устойчивости переднего и заднего мостов определено
выражение критической скорости автомобиля, а также переднего и заднего моста
без скольжения при совместном действии касательных и поперечных сил.
. Оценка управляемости автомобиля ГАЗ-31105 по вышеприведенным критериям
выявила:
а) курсовой угол при входе и выходе из поворота возрастает прямо
пропорционально времени первой фазы поворота (увеличения угла поворота управляемых
колес) и обратно пропорционально скорости движения автомобиля;
б)
критическая скорость без скольжения при совместном действии касательных и
поперечных сил медленно убывает с возрастанием удельной касательной реакции,
однако при постоянной касательной реакции с увеличением радиуса поворота
автомобиля в K раз возрастает в  раз;
раз;
в)
критическая скорость по условиям увода автомобиля ГАЗ-31105 являясь очень
высокой при отношении массы, приходящейся на заднюю ось, к общей массе
автомобиля до 0.5 быстро уменьшается, достигая значений 10…13 м/с при
вышеупомянутом отношении, равном 0.9. Наиболее приемлемым для поворачиваемости
автомобиля является превышение коэффициента сопротивления уводу задних колес по
сравнению с передними.
.
Выполненные оценка управляемости автомобиля ГАЗ-31105, влияние технического
состояния автомобиля на его управляемость и устойчивость, а также влияние
эксплуатационных факторов на управляемость и устойчивость, позволили выработать
приемы управления автомобилем в аварийных ситуациях.
.
Кроме того в дипломном проекте рассмотрены эксплуатационное свойство,
характеризующее рабочее место автомобиля, а именно параметры обитаемости
автомобиля, характеризующее органы управления, а также экологическое состояние атмосферного
воздуха в Республике Казахстан.
.
Экономическая оценка эффективности ограничения скорости на ул. Аль-Фараби
выявила годовой экономический эффект более 3.6 млн. тенге.
Список
использованной литературы
1. Коноплянко В.И. Организация и безопасность
дорожного движения. - М.: Транспорт, 2007 г.- 182 с.
2. Интыков Т.С. Основы организации и
безопасности движения. - Караганда : КарПТИ, 2008 г. - 95 с.
3. Немцов Ю.М., Майборода О.В.
Эксплуатационные качества автомобиля, рекомендованные требованиями безопасности
движения. - М.: Транспорт, 2008 г. - 139 с.
4. Аксенов В.А., Попова Е.П., Дивочкин
О.А. Экономическая эффективность рациональной организации дорожного движения. -
М.: Транспорт, 2006 г. - 128 с.
5. Васильев А.П., Фримштейн М.И.
Управление движением на автомобильных дорогах. - М.: Транспорт, 2008 г. - 296
с.
6. Кременец Ю.А. Технические средства
организации дорожного движения. - М.: Транспорт, 2009 г. - 255 с.
7. Гришкевич А. И. Автомобили: Теория. -
Мн.: Выш. шк., 2007 г. - 208 с.
8. Аубекеров Н.А. Методы анализа
эксплуатационных свойств автомобиля. - Караганда, КарПТИ, 2009 г. - 107 с.
9. Литвинов А. С., Фаробин Я. Е.
Автомобиль: теория эксплуатационных свойств. - М.: Машиностроение, 2008 г. -
240 с.
10.Литвинов А. С.
Управляемость и устойчивость автомобиля. - М.: Машиностроение, 2008 г. - 416 с.
11.Эллис Д. Р.
Управляемость автомобиля. - М.: Машиностроение, 2009 г. - 216 с.
12.Антонов Д.А.
Расчет устойчивости движения многоосных автомобилей. - М.: Машиностроение, 2003
г. - 168 с.
13.Автомобильные
транспортные средства/под ред. Д.П. Великанова. - М.: Транспорт, 2007 г. - 326
с.
14.Фаробин Я.Е.
Теория поворота транспортных машин. - М.: Транспорт, 2006 г. - 326 с.
15.Афанасьев Л.Л.,
Дьяков А Б., Иларионов В.А. Конструктивная безопасность автомобиля. - М.:
Машиностроение, 2005 г. - 212 с.
16.Краткий
автомобильный справочник. - М.: Транспорт, 2008 г. - 220 с.
17.Кисляков Ю.Д.,
Мороз Л.Н. Анализ и инженерное исследование дорожно-транспортных происшествий.
- Алма-Ата, ЦНОТНИТИ, 2007 г. - 68 с.
18.Иларионов В.А.
Эксплуатационные свойства автомобиля. - М.: Машиностроение, 2009 г. - 312 с.
19.Коршаков И.К.
Пассивная безопасность автомобиля. - М.: МАДИ, 2009 г. - 87 с.
20.Проценко В.Б.
Организация рабочего места водителя. - М.: ВНИИТЭ, 2009 г. - 135 с.
21.Сильянов В.В.
Теория транспортных потоков в проектировании дорог и организации движения. -
М.: Транспорт, 2009 г. - 303 с.