Современные и перспективные электронные системы автомобилей
МИНЕСТЕРСТВО ОБРАЗОВАНИЕ МОСКОВСКОЙ ОБЛАСТИ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ОБРАЗОВАНИЯ «МОСКОВСКИЙ ОБЛАСТНОЙ
ГОСУДАРСТВЕННЫЙ СОЦИАЛЬНО-ГУМАНИТАРНЫЙ
УНИВЕРСИТЕТ»
КОНТРОЛЬНАЯ РАБОТА
ПО ДИСЦИПЛИНЕ КВС
«Современные и перспективные электронные системы
автомобилей»
Выполнил:
Носков А.В.
Проверил:
Петкевич Г.М.
Коломна 2016 год.
Содержание
1. Архитектура
микропроцессоров и микроконтроллеров автомобиля. Преобразователи аналоговых и
дискретных устройств. АЦП, ЦАП
. Управление
системами двигателя. Электронная система впрыскивания и зажигания. Электронная
система подачи топлива
Список
литературы
1. Архитектура микропроцессоров и
микроконтроллеров автомобиля. Преобразователи аналоговых и дискретных
устройств. АЦП, ЦАП
Микроконтроллер - это специализированное
микроэлектронное программируемое устройство, предназначенное для использования
в управляющих узлах всевозможных технических изделий, системах передачи данных
и системах управления технологическими процессами.
Микроконтроллеры применяют в бытовой технике,
медицинских приборах, системах управления лифтами, телефонах, рациях и прочих
средствах связи, электронных музыкальных инструментах и автомагнитолах,
компьютерной периферии (клавиатурах, джойстиках, принтерах и т. п.), светофорах,
автоматических воротах и шлагбаумах, интерактивных детских игрушках,
автомобилях, локомотивах и самолетах, роботах и промышленных станках.

Рис. 1. Сферы применения микроконтроллеров.
Микроконтроллеры также широко используются в
автомобильной электронике. Например, автомобиль «Peugeot 206» имеет на борту 27
микроконтроллеров, а в автомобилях высокого класса, таких как, например, «BMW»
седьмой серии, используется более 60 микроконтроллеров. Они регулируют жесткость
адаптивной подвески, управляют впрыском топлива, светотехникой, двигателями
дворников, стеклоподъемников и зеркал заднего вида и т. п.
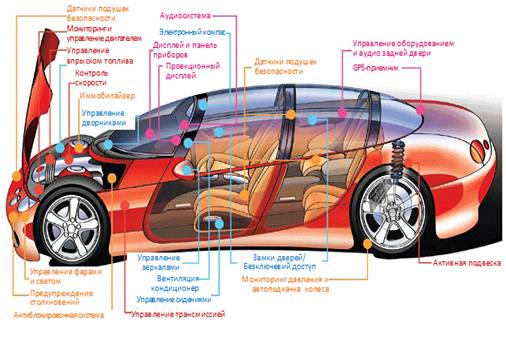
Рис. 2. Использование микроконтроллеров в
автомобильной электронике (по материалам Microchip Technology).
Микроконтроллер, в отличие от микропроцессора,
обычно имеет небольшую разрядность (8 - 16 бит) и богатый набор команд
манипулирования отдельными битами. Битовые команды дают возможность управлять
дискретным оборудованием (поднять/опустить шлагбаум, включить/выключить лампу,
нагреватель, запустить/остановить двигатель, открыть/закрыть клапан, и проч.)
Средства, обеспечивающие возможность оперировать отдельными битами, вводить и
выводить дискретные сигналы называют «битовым процессором».
Еще одно из основных отличий микроконтроллера от
микропроцессора заключается в том, что в составе микросхемы контроллера
наличествуют все необходимые элементы для построения простой (а иногда - и
достаточно сложной) системы управления. Так, внутри микроконтроллера есть
память данных (оперативная память), память программ (постоянная память),
генератор тактовых импульсов, таймеры, счетчики, параллельные и
последовательные порты. Поэтому система минимальной конфигурации на основе
микроконтроллера может состоять из блока питания, непосредственно микросхемы
контроллера и нескольких пассивных элементов (резисторов, конденсаторов и
кварцевого резонатора).
И это фактически есть ничто иное, как
одноплатный мини-компьютер на основе одной микросхемы, подходящий для
встраивания в объект управления. Средняя стоимость системы минимальной
конфигурации составляет несколько десятков долларов (сравните со средней
стоимостью персонального компьютера).
Типовая архитектура микроконтроллера (рис. 3)
содержит систем систему синхронизации и управления (1), арифметико-логическое
устройство (2), регистры общего назначения (3), память данных (4) и память
программ (5), порты (6), функциональные устройства (таймеры, счетчики,
широтно-импульсные модуляторы, интерфейсы) и регистры для их настройки (7),
рис. 4.
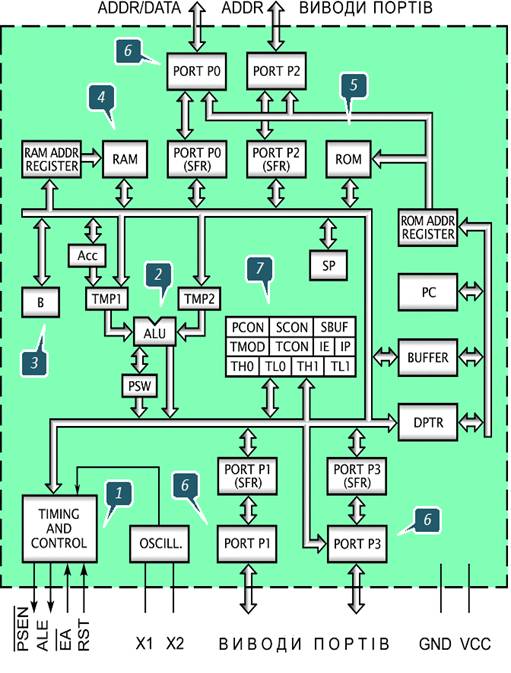
Рис. 3. Архитектура типичного микроконтроллера.
Программы для микроконтроллеров создают в
специальных интегрованных инструментальных средах (англ.: Integrated
Development Environment, IDE) языками Асемблера (машинных команд) или C++.
Остается добавить, что ежегодно в мире продаются
миллиарды микроконтроллеров, а обычный житель развитой страны в течение дня
десятки раз соприкасается с микроконтроллерами, являющимися неотъемлемой частью
современной технологичной окружающей среды.
Кроме микропроцессоров общего назначения и
микроконтроллеров на рынке предлагаются так называемые сигнальные процессоры,
специально предназначенные для обработки сигналов в режиме реального времени.
Они используются в измерительных приборах, средствах связи, передачи и
воспроизведения аудио- и видеопотоков, системах локации, космической и военной
технике.
Сигнальные процессоры (англ.: Digital Signal
Processor, DSP) характеризуются высокой разрядностью и быстродействием, имеют в
системе команд специальные инструкции для реализации типовых алгоритмов
цифровой обработки сигналов (ЦОС). Также на одном кристалле, кроме собственно
процессорной части, реализуются аналогово-цифровые и цифро-аналоговые
преобразователи. Аналого-Цифровой Преобразователь (АЦП) заменяет непрерывный
входной сигнал соответствующим потоком цифровых данных (отсчетов). Далее эти
данные обрабатываются процессорной частью, после чего с помощью
Цифро-Аналогового Преобразователя (ЦАП) обработанные цифровые данные снова
воспроизводятся в аналоговый сигнал. Таким способом сигнальный процессор может
углублять четкость изображения, или, наоборот, размывать его, шифровать и
дешифровать аудио- и видеопотоки, воспроизводить на экране виртуальную или
дополненную реальность, отслеживать движущиеся объекты даже в условиях
значительных помех и неполной входной информации.
ТИПЫ МИКРОПРОЦЕССОРОВ
|
Микропроцессоры
общего назначения
|
Микроконтроллеры
|
Сигнальные
процессоры
|
Другие
(нейрочипы, секционные и гибридные процессоры)
|
|
Применяются:
для построения персональных компьютеров, серверов и многопроцессорных систем.
|
Применяются:
для реализации несложных функций управления и автоматизации.
|
Применяются:
для реализации сложных алгоритмов потоковой обработки данных в режиме
реального времени.
|
Применяются:
для построения уникальных экспериментальных или специфических систем.
|
|
Особенности:
• высокая вычислительная производительность, • высокая разрядность, •
универсальная архитектура.
|
Особенности:
• встроенная память программ и память данных, • битовый процессор, • таймеры,
счетчики, порты, интерфейсы.
|
Особенности:
• высокая вычислительная производительность, • команды для реализации типовых
алгоритмов обработки сигналов, • встроенные АЦП, ЦАП или медиа-интерфейсы.
|
Особенности:
• построение одного процессора на нескольких микросхемах, • комбинация
нескольких видов процессоров в одном изделии, • специфическая архитектура
|
|

|

|

|

|
Еще один тип микропроцессорных устройств,
которые за последние 30 - 40 лет заняли свою рыночную нишу - так называемые
программируемые логические контроллеры.
Программируемый Логический Контроллер (ПЛК;
англ.: Programmable Logic Controller или PLC) - это специализированная
микропроцессорная система, которая используется для автоматизации
технологических процессов и общепромышленных установок и комплексов
(конвейеров, рольгангов, подъемных кранов, дробилок, мельниц, классификаторов,
смесителей, прессов, упаковочных машин, робототехнических и гибких
производственных комплексов, и т. п.)
Т. е. основная сфера применения ПЛК - это сфера
промышленного производства. Однако они также используются для автоматизации
зданий (контроль доступа в помещение, управление освещением, обогревом,
вентиляцией и кондиционированием воздуха, управление лифтами, эскалаторами и т.
п.) Также ПЛК могут применяться для создания микроклимата в тепличном
хозяйстве, на птицефабриках, животноводческих фермах. В общем случае ПЛК - это
одноплатный мини-компьютер, построенный на основе однокристального
микроконтроллера и расположенный в типовом корпусе размерами с кирпич. Также
существуют модульные контроллеры (рис. 4). Ко входам ПЛК можно подсоединить
кнопки, контакты джойстика, переключатели (т. е. органы управления), датчики и
исполнительные механизмы (двигатели, лампы, нагревательные элементы, клапаны,
вентили, актуаторы и т. п.) ПЛК циклически опрашивает входные сигналы (органы
управления и датчики), выполняет программу пользователя (пересчитывает значения
переменных) и выдает полученные выходные значения на исполнительные механизмы.
Т. е. ПЛК циклически, раз за разом выполняет одну и ту же программу (программу
пользователя).

Рис. 4. Программируемые логические контроллеры.
Кроме аппаратной унификации (использования
стандартных размеров, уровней напряжений, видов сигналов), прорывному
распространению ПЛК поспособствовало то, что для них были разработаны
интуитивные «общеинженерные» языки программирования. Теперь для разработки
программы пользователя не обязательно приглашать программиста высокого класса.
С этим может справиться (иногда - и лучше) и технолог, и электрик, и химик, и,
конечно, специалист по автоматизации. А в случае сложных задач эти языки
программирования стирают грань недопонимания между программистом и инженером.
Они одинаково понятны и заказчику (инженеру) и исполнителю (программисту).
Таких языков программирования - 6 (5
стандартизированных), причем 4 из них - визуальные (т. е. программа вводится не
в виде текста, а как набор соединенных друг с другом графических элементов
(блоков), (рис. 5).
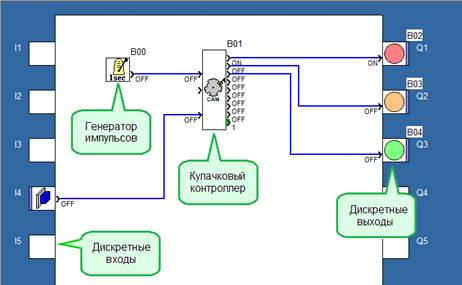
Рис. 5. Пример программы для ПЛК
(анимация
<#"872825.files/image010.gif">
Рисунок 6 - Схема цифро-аналогового
преобразователя
Упрощенная схема реализации ЦАП представлена на
рис1. В схеме i - й ключ замкнут при Qi=1, при Qi=0 -
разомкнут. Регистры подобраны таким образом, что R>>Rн.
Эквивалентное сопротивление обведенного
пунктиром двухполюсника Rэк и сопротивление нагрузки Rн образуют делитель
напряжения, тогда
вых = E Rн / Rэк + Rн » E*Rн / Rэк (2)
Проводимость двухполюсника 1 / Rэк равна сумме
проводимостей ветвей (при Qi=1 i - ветвь включена, при Qi=0
- отключена):
/ Rэк = Q1 / 8R + Q2 / 4R + Q3 / 2R + Q4 / R (3)
Подставив (3) в (2), получаем выражение,
идентичное (1)вых = (8Е Rн / R)*( Q1*1 + Q2*2 + Q3*4
+ Q4*8 )
Очевидно, что е = 8Е Rн / R. Выбором е можно
установить требуемый масштаб аналоговой величины.
. Аналогово-цифровые преобразователи. В
информационных и управляющих системах часть (или вся) информация от датчиков
бывает представлена в аналоговой форме. Для ее ввода в цифровые ЭВМ и цифровое
управляющее устройство широко применяются аналогово-цифровые преобразователи
(АЦП). В большинстве случаев АЦП выполняют преобразование входного напряжения
или тока в двоичный цифровой код.
Существуют различные типы АЦП. Мы остановимся
лишь на тех типах, которые получили в настоящее время наибольшее
распространение.
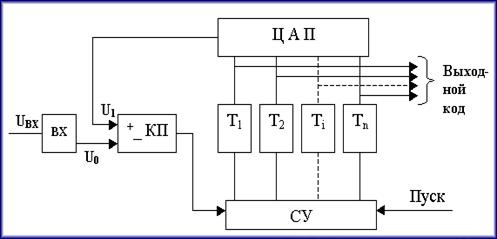
Рисунок 7 - Схема АЦП последовательного
приближения
АЦП последовательного приближения (АЦППП).
Структурная схема АЦППП приведена на рисунке 7. Схема работает следующим
образом. Входной аналоговый сигнал Uвх перед началом преобразования
запоминается схемой выборки - хранения ВХ, что необходимо, так как в процессе
преобразования необходимо изменение аналогового сигнала. Далее по команде
“Пуск” с помощью сдвигового регистра последовательно во времени каждый триггер
Ti, начиная со старшего разряда, переводит в положение 1 соответствующий разряд
ЦАП. Напряжение U1 (или ток) с выхода ЦАП сравнивается с входным аналоговым
сигналом с помощью компаратора КП. Если U0 > U1, на выходе компаратора
сохраняется низкий уровень и в триггере сохраняется единица, при U0 < U1
срабатывает компаратор и переводит триггер в положение 0. После окончания цикла
на выходах триггеров получается двоичный код, соответствующий (при идеальных
элементах) U0 с точностью до половины младшего разряда. Погрешность АЦППП
определяется неточностью ЦАП, зоной нечувствительности и смещением нуля
компаратора, а также погрешностью схемы выборки - хранения.
пр=tвх+n(tз,к+tу+tц)+tcб,
где tвх - время, необходимое для фиксации Uвх
схемой ВХ; n - число разрядов; tз,к - время задержки, вносимое компаратором; tу
- время установления U1 на входе ЦАП; tц - время задержки цифровых элементов в
схеме управления и срабатывания триггера; tсб - время, необходимое для сброса
ЦАП в исходное состояние, включая время, необходимое для синхронизации с
началом такта.
Наибольшую долю в tпр обычно вносит tу,
наибольшая величина которого может быть оценена следующим образом:
у=(1+n)Тэln2,
где Tэ - эквивалентная постоянная времени на
входе ЦАП. Если на его выходе включен ОУ, который полезен для уменьшения
выходного сопротивления и ускорения тем самым переходного процесса, то Tэ» 1/2p
fср (fср - частота среза ОУ по контуру обратной свази). При 12 - разрядном АЦП
и использовании быстродействующего ЦАП с tу=100 нс время tпр близко к 1,5 мкс.
В большинстве случаев tпр такого преобразователя достигает 10 - 100 мкс. АЦП
параллельного типа (АЦПП). Существенное уменьшение tпр удается получить в АЦП
параллельного типа. Его структурная схема приведена на рис3. Здесь входная
аналоговая величина U0 с выхода схемы ВХ сравнивается с помощью 2n+1
- 1 компараторов с 2(2n-1) эталонными уровнями, образованными
делителями из резисторов равного сопротивления. При этом срабатывают m младших
компараторов, образующих на выходах схем И-НЕ нормальный единичный код, затем
который с помощью специального дешифратора ДШ преобразуется в двоичный выходной
сигнал.
Погрешность АЦПП определяется неточностью и нестабильностью
эталонного напряжения, резистивного делителя и погрешностями компараторов.
Значительную роль могут играть входные токи компараторов, если делитель
недостаточно низкоомный. На рисунке 8 приведена структурная схема АЦП
параллельного типа.
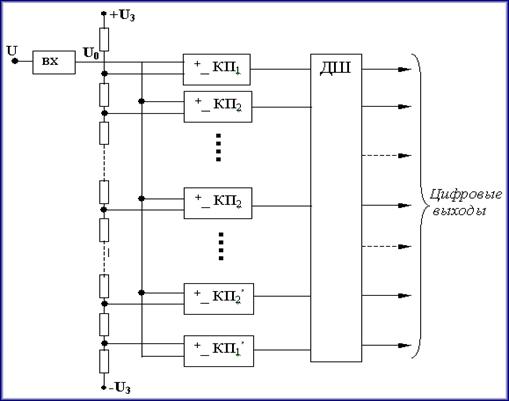
Рисунок 8 - Схема АЦП параллельного типа.
Время преобразования складывается из следующих
составляющих:
пр = tвх
+ tз,к + a tл,сi ,
где tл,сi - Время задержки логических
схем; k - число последовательно включенных логических схем.
При использовании компараторов со стробированием
АЦПП может быть без схемы ВХ. При этом он обеспечивает наибольшее
быстродействие по сравнению с любыми другими АЦП.
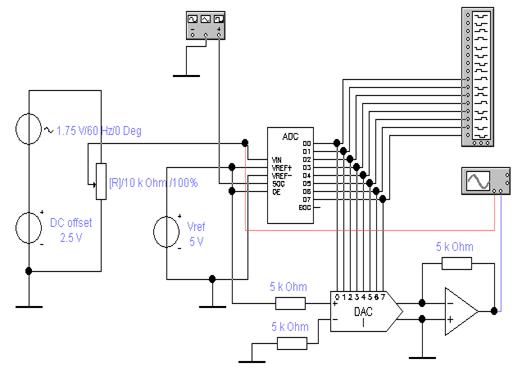
Рисунок 9 - АЦП и ЦАП.
На рисунке 9, показана схема для преобразование
аналоговой величины (напряжения) в цифровой код и обратное проебразование
цифрового кода в аналоговую величину. Процесс работы схемы показан на временной
диаграмме. Временная диаграмма, иллюстрирующая работу АЦП и ЦАП, приведена на
рисунке 10.
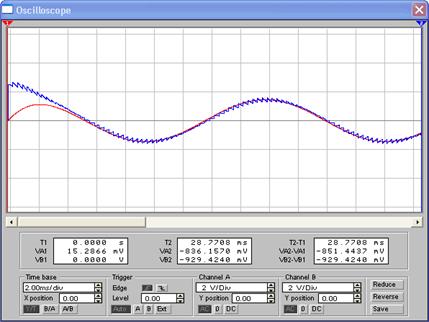
Рисунок 10 - Диаграмма работы АЦП и ЦАП.
. Управление системами двигателя. Электронная
система впрыскивания и зажигания. Электронная система подачи топлива
Электронные системы автоматического управления
широко применяют в управлении большинством механизмов и агрегатов автомобиля:
двигателем, трансмиссией, подвеской, рулевым управлением, а также процессами
торможения, предотвращения столкновений, развертывания средств пассивной
защиты.
Системы топливоподачи бензиновых двигателей
подразделяют на две основные группы:
карбюраторные системы с электронным управлением,
в которых подачей топлива управляют путем изменения проходного сечения главного
топливного жиклера;
системы впрыска топлива во впускной трубопровод
или непосредственно в цилиндр двигателя (непосредственный впрыск в цилиндр
из-за сложности реализации практически не применяют). Электронное управление
карбюратором на современных автомобилях предусматривает в основном управление
экономайзером принудительного холостого хода ЭПХХ. Это объясняется тем, что у
автомобиля, особенно в городских условиях, часто используется режим движения
накатом без отключения двигателя от трансмиссии.

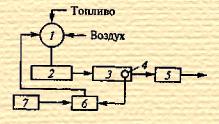
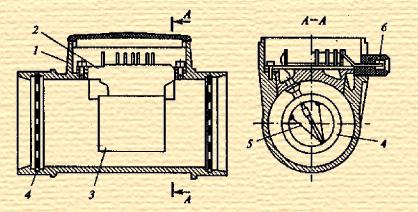
Система автоматического управления экономайзером
принудительного холостого хода: 1- датчик частоты вращения вала, 2 - датчик
положения дросселя, 3 - двигатель, 4 - электромагнитный клапан; 5 - карбюратор,
6 - блок управления ЭПХХ
На легковых автомобилях устанавливают два
клапана. Один из них, управляющий проходным сечением канала холостого хода,
имеет вакуумный привод. Второй, соединяющий вакуумную камеру этого привода с
впускным коллектором двигателя, - электромагнитный. Двухклапанная схема
управления применена на автомобилях ВАЗ-2108.
Управление впрыском топлива. Системы впрыска
топлива для бензиновых двигателей подразделяют на две группы:
системы распределенного впрыска, когда форсунки
устанавливают в зоне впускных клапанов каждого цилиндра;
системы центрального впрыска, когда имеется одна
(реже две) форсунка на весь двигатель, и подача (впрыск) топлива осуществляется
(аналогично карбюратору) в одном месте впускного трубопровода; в этой зоне
формируется смесительная камера, а из нее топливная смесь распределяется на
тактах всасывания по каждому цилиндру в порядке их работы.
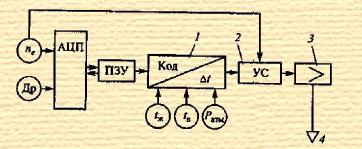
Система электронного впрыска топлива: 1 -
преобразователь кода; 2 - устройство синхронизации; 3 - усилитель мощности; 4 -
форсунки; nе, Др, tж, tв и Paтм
- датчики.
В большинстве систем электронного впрыска
используется синхронный режим, т. е. на один оборот коленчатого вала двигателя
- один впрыск. На разгонном режиме для повышения мощности двигателя
используется не только синхронный, но и асинхронный впрыск. Как карбюраторные
системы с электронным управлением, так и системы впрыска топлива
предусматривают наличие на автомобиле электронной системы зажигания с цифровым
управлением утлом опережения зажигания. Попыткой удовлетворить современные
требования к экологическим характеристикам автомобилей является внедрение
программно-адаптивных систем топливоподачи, когда обратная связь осуществляется
путем контроля химического состава отработавших газов.
Следящая система автоматического регулирования
топливоподачи: 1 - дозирующее устройство; 2-двигатель; 3 - выпускной тракт;
4-датчик кислорода, 5 - нейтрализатор; 6- схема сравнения; 7 - задатчик
опорного напряжения
Электронная система управления двигателем фирмы
«Тойота»: 1 - замок зажигания, 2 - электронный микропроцессорный
блокуйравления, 3 - воздушный фильтр; 4-датчик температуры поступающего в
двшатель воздуха; 5-датчик расхода воздуха; 6- регулятор давления; 7 - клапан
холостого хода; 8 - форсунка холодного пуска; 9 - датчик угла открытия
дроссельной заслонки, 10 - редукционный клапан; 11 - форсунка; 12 - топливный
фильтр, 13 - топливный насос; 14 - топливный бак; 15 - таймер прогрева; 16 -
датчик детонации, 17-датчик температуры в системе охлаждения, 18- дагчик
падения давления масла; 19 - датчик кислорода; 20 - катушка зажигания, 21 -
распределитель зажигания; 22- реле включения; 23 -датчик скорости
Управление топливоподачей дизелей. Электронные
системы управления топливоподачей дизелей используют для снижения токсичности и
дымности отработавших газов, акустических излучений, а также для стабилизации
работы двигателя на холостом ходу. Они выполняют следующие функции:
количественное управление топливоподачей;
управление моментом начала впрыска;
управление частотой вращения коленчатого вала на
холостом ходу и защитой двигателя от превышения допустимой частоты;
управление свечами накаливания.
Как и для карбюраторных двигателей, используют
три типа электронных систем управления дизелями: аналоговые, цифровые и
микропроцессорные. Из-за некоторых специфических недостатков аналоговые и
цифровые системы управления распространены в основном на стационарных
двигателях, работающих в установившихся режимах.
Микропроцессор на основе информации о режимных
параметрах формирует предварительные коды для исполнительных механизмов,
которыми задается режим работы двигателя.
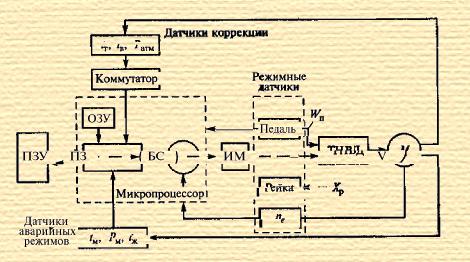
Микропроцессорная система управления дизелем
ПЗУ - постоянное запоминающее устройство; ОЗУ -
оперативное запоминающее устройство, ПЗ - программный задатчик, БС - блок
сравнения; ИМ - исполнительный механизм; ТНВД - топливный насос высокого
давления; М- дизель, Wn - датчик положения педали топливоподачи; Ар
- датчик реального текущего положения рейки топливного насоса, nе -
частота вращения коленчатого вала двигателя; tм и Рм -
температура и давление масла; tж, tт и tв -
температура соответственно охлаждающей жидкости, топлива и воздуха; Д1М -
атмосферное давление
Информационное обеспечение микропроцессорных
систем управления двигателем.
Комплекс датчиков, с помощью которых
представляется исходная информация для электронных систем управления
автомобилем, состоит из датчиков частоты вращения, линейного и углового
перемещения, температуры, давления (в том числе детонации), расхода воздуха и
химического состава газа. Датчик частоты вращения формирует информацию о
частоте вращений коленчатого вала двигателя и о моментах прохождения поршнем
ВМТ.
Применяют датчики индуктивные или основанные на
эффекте Холла. Датчики угла поворота дроссельной заслонки: а - реостатный; б -
потенциометрический; в - дискретный; 1 - резистивный элемент; 2 - корпус; 3, 4
и 6- ползунки; 5 - кабельный разъем; 7 - контактная пластина; 8 и 11 -
контактные группы; 9 - привод; 10 - кулачок
Датчики для измерения температурного режима
двигателя и передачи информации в электронные блоки управления используют в
основном аналогового типа.
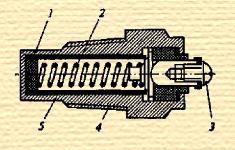
Датчик температуры двигателя с терморезисторным
чувствительным элементом: 1 - терморезистор; 2 - пружина; 3 - вывод; 4 -
корпус; 5 - втулка
автомобиль микропроцессор зажигание двигатель
Датчик давления - также аналогового
(непрерывного) действия - подобен датчику для измерения давления в системе
смазывания двигателя.
Давление воспринимается мембраной, которая
перемещает движок потенциометра (резистивный датчик) или магнитный сердечник
внутри катушки индуктивности. Перспективными считаются датчики, в которых
используется пьезоэффект или пьезорезистивный эффект. В первом случае давление
рабочей среды передается на кристалл из цирконата-титаната свинца, на
поверхности которого под действием давления образуются электрические заряды,
пропорциональные давлению. Во втором случае полупроводниковый кремниевый
кристалл выполнен в виде мостовой резистивной схемы .
Под действием давления пропорционально изменяется
сопротивление резисторов, а следовательно, и сила тока, проходящего через них.
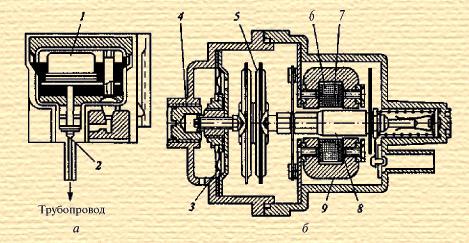
Датчики давления: а - полупроводниковый; б -
индуктивный; 1- полупроводниковый тензорезистор; 2 - фильтр; 3 - мембрана
камеры компенсации изменения атмосферного давления; 4- пробка; 5 - анероидная
коробка; 6 и 7 - катушки индуктивности; 8 - сердечник; 9 - ярмо
Датчик детонации - это тот же датчик давления
пьезоэлектрического типа, по существу работающий подобно микрофону. Возникновение
детонации в цилиндрах двигателя сопровождается колебаниями давления
определенной частоты.
Датчик детонации: а - конструкция; б-
характеристика датчика детонации при постоянной частоте вращения коленчатого
вала двигателя; в - графики обработки сигнала датчика при компьютерном
распознавании возникновения детонации; 1 - пьезоэлемент; 2 - мембрана; Uвых
- выходное напряжение; t - время
Для создания датчиков расхода воздуха могут быть
использованы несколько физических принципов. Например, расход воздуха измеряют
по частоте вращения турбинки, помещенной в движущийся воздушный поток, по углу
отклонения (под воздушным напором) свободно поворачивающейся заслонки в
трубопроводе или по перепаду давлений перед дросселем и за ним в трубопроводе.
Наиболее распространен термоанемометрический метод измерения скорости (расхода)
воздуха. Принцип действия такого датчика заключается в том, что если нагретый
электрическим током проводник, у которого сопротивление зависит от температуры,
поместить в воздушный поток, то этим потоком проводник будет охлаждаться и,
следовательно, менять свое сопротивление. Изменение сопротивления
пропорционально скорости потока. Поэтому по изменению сопротивления судят о
скорости потока, а при известном сечении трубопровода - и о расходе воздуха
через этот трубопровод.
Обычно используют два проводника: один - в среде
с движущимся воздушным потоком, другой - в среде с неподвижным воздухом. Этим
компенсируется влияние температуры окружающей среды.
Датчик расхода воздуха на базе термоанемометра:
1- корпус; 2 - электронный модуль; 3 - формирователь воздушного потока; 4-
сетка; 5 - платиновая нить; 6- штекерный разъем
К датчикам, реагирующим на химический состав
газа (в частности, на содержание кислорода), относится лямбда-зонд.
Чувствительные элементы датчика выполнены из двуокиси циркония или титана.
Циркониевый датчик представляет собой гальванический элемент с пористыми
платиновыми электродами. Промежуток между электродами заполнен двуокисью
циркония, который является электролитом. Такому гальваническому элементу путем
прессования придается форма колпачка.
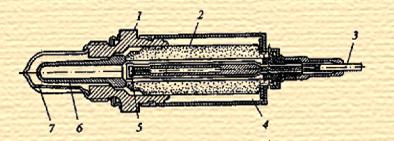
Датчик кислорода: 1 и 2 соответственно
металлический и керамический корпуса; 3 - выходной кабель; 4 - внешний кожух; 5
- контактный наконечник; 6 - активный элемент (колпачок); 7 - защитный кожух с
прорезями
Список литературы
1. http://elprivod.nmu.org.ua/ru/interesting/what_is_mp_mc_plc.php
2. <http://autocxema.ucoz.ru/index/ehlektronika_dvigatelja/0-20>