Проектирование и исследование кривошипно-ползунного механизма рабочей машины
ПОЯСНИТЕЛЬНАЯ
ЗАПИСКА
К курсовой
работе по теории механизмов и машин на тему: «Проектирование и исследование
кривошипно-ползунного механизма рабочей машины»
Автор проекта: Иваницкий А.С.
Группа ПМ-141, направление
“Прикладная Механика ”.
Руководитель работы: Рязанцева И.Л.
В расчетно-пояснительную записку входит: структурный, кинематический,
кинетостатический анализ кривошипно-ползунного механизма рабочей системы и
расчет параметров противовесов, которое обеспечивающее его не полное статическое
уравновешивание. Проведены расчеты уравновешивающих сих двумя способами: по
средствам метода плана и методом
«жесткого рычага» Н.Е. Жуковского.
Записка состоит из 29 листов, содержит 14 рисунков и 4 таблицы.
СОДЕРЖАНИЕ
Введение
. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.1 Структурный анализ механизма
1.2 Разметка механизма
.3 Расчет скоростей методом планов
.4 Расчет ускорений методом планов
. СИЛОВОЙ РАСЧЕТ МЕХАНИЗМА
.1 Силовой расчет структурной группы
методом планов
.2 Силовой расчет ведущего звена методом
планов
.3 Определение уравновешивающей силы
методом «жесткого рычага» Н.Е. Жуковского
.4 Статическое уравновешивание
механизма
2.5 Схема нагружения кривошипа
Заключение
Список литературы
ВЕДЕНИЕ
В данной курсовой работе выполнено кинематическое и
кинетостатическое исследование механизма рабочей машины.
В ходе кинематического исследования были определены:
крайние положения механизма, построена его разметка для 12-ти положений,
методом планов выполнен расчет для 12-ти скоростей и для двух положений
рабочего хода расчет ускорений.
В ходе кинетостатического анализа для двух положений
механизма методом планов определены реакции в кинематических парах и
уравновешивающая сила (уравновешивающий момент сил). Методом рычага Жуковского
был выполнен расчет уравновешивающего момента сил. А так же было выполнено
Статическое уравновешивание механизма.
. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.1 Структурный
анализ механизма
В задачи структурного анализа входит определение
подвижности механизма и его строения.
На рис.1. представлен кривошипно-ползунный механизм
рабочей машины ,который состоит из 4-х звеньев:
0-стойка - неподвижное звено механизма.
-кривошип - звено, связанное со стойкой и поворачивающееся на угол 360◦
;
-шатун - звено, не связанное со стойкой, совершает плоскопараллельное
движение;
-ползун - звено, совершающее возвратно-поступательное движение
относительно стойки.
Звенья образуют 4 кинематические пары пятого класса
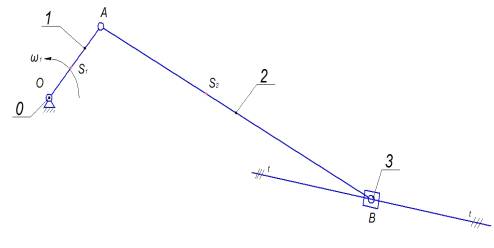
Рис. 1. Кривошипно-ползунный механизм рабочей машины
Подвижность механизма определяется по формуле Чебышева
(1.1)
=3 n-2 P5-P4
, (1.1)
где n -
количество подвижных звеньев;
Р5 - количество кинематических пар 5
класса;
P4- количество кинематических пар 4 класса.
В данном случае W=3*3-2*4-0=1, это доказывает что, в механизме одно звено,
которое должно совершать независимое движение.
Структурная схема механизма приведена на рис. 2.

Рис. 2. Структурная схема механизма рабочей машины.
Формула строения механизма:

Исследуемый
механизм является механизмом II класса.
1.2 Разметка
механизма
Разметка механизма выполняется для определения крайних положений, в
дальнейшем скоростей и ускорений механизма.
Для построения разметки необходимо:
) На свободном поле чертежа выбрать ось вращения точку О.
) Выбрать масштабный коэффициент таким образом что бы он был целым числом
или простой десятичной дробью, необходимо добавить, что в последующих
определениях масштабного коэффициента нужно придерживаться этого правила .
Масштабный коэффициент высчитывается по формуле:
 , (1.2)
, (1.2)
где
 - длина кривошипа , ОА-длина кривошипа используемая на
чертеже, выбранная произвольно
- длина кривошипа , ОА-длина кривошипа используемая на
чертеже, выбранная произвольно

)
Далее определяем величины приведённые в табл. 1
Таблица 1
|
|
e
|

|
lAB
|

|

|
|
кинематический размер
|
м
|
-0,02
|
0,07
|
0,28
|
0,03
|
0,11
|
мм
|
-14,29
|
50
|
200
|
21
|
78
|
) Отрезком ОА проводим окружность
) Полученную окружность необходимо разделить на 12
равных частей.
Полученные отрезки будут изображать промежуточное
положение кривошипа ОА .
) Для того что бы определить одно из крайних положений
механизма складываем длины отрезков ОА и АВ получаем В* и соответственно
отнимая ОА и АВ получим В**. Точками В* и В** ставим засечки на направляющей t-t.
От точки В** проведём прямую проходящую через центр О
и доводим прямую до пересечения с окружностью. Полученную точку обозначим как
А0=А*, так как она является началом рабочего хода механизма. Далее от точки В*
таким же образом проводим прямую до пересечения с центром стойки, где прямая
пересекает окружность обозначим за точку А**, эта точка характеризует собой
конец рабочего хода механизма.
7) Из точек А1-А11 необходимо выполнить засечки на направляющей t-t А1 В1, А2 В2…и т.д. Полученные точки на прямой будут
изображать рабочий ход механизма.
) В каждом из положений механизма необходимо найти
точки центров масс S1 и S2, из полученных данных построить
траектории точек.

Рис. 3. Разметка механизма
1.3 Расчет скоростей методом
планов
Расчёт плана скоростей для 12-ти положений начинается
с определения скорости точки А, для определения скорости воспользуемся формулой
[1-2]:
 .
.
Далее
составим векторное уравнение для нахождения скорости точки В[1-2].
→
→ →
VB=VA+VBA, (1.3.)
Скорость
точки VA направлена
перпендикулярно кривошипу в рассматриваемом его положении, вектор VBA направлен перпендикулярно шатуну в рассматриваемом
положении механизма, а  - вдоль направляющей
- вдоль направляющей  ползуна.
ползуна.
Далее необходимо найти масштабный коэффициент, для
этого выберем графический отрезок  примем его равным 98мм. Тогда,
используя формулу приведенную ниже, получим масштабный коэффициент равный:
примем его равным 98мм. Тогда,
используя формулу приведенную ниже, получим масштабный коэффициент равный:
Для
построения плана скоростей необходимо:
)
На свободном поле чертежа изобразим полюс
плана скоростей, точку 
)
На точке проводим прямую перпендикулярно
направляющей t-t
) От точки проводим
прямую перпендикулярно кривошипу в рассматриваемом его положении и откладываем
на нём отрезок
4) Из полученной точки на плане скоростей проводим луч перпендикулярный
шатуну в рассматриваемом его положении и откладываем на нём отрезок AB.
) От полюса плана скоростей откладываем прямую до пересечения с отрезком
АB. Полученная точка и является искомой
точкой  в рассматриваемом его положении.
Полученные данные изображают скорости VB,
VA, VBA, в масштабном коэффициенте.
в рассматриваемом его положении.
Полученные данные изображают скорости VB,
VA, VBA, в масштабном коэффициенте.
Так
же для построения плана скоростей необходимо найти скорости центров масс  и
и  .
Определения центров масс скоростей составляется по свойству подобия планов
скоростей. Составим пропорции:
.
Определения центров масс скоростей составляется по свойству подобия планов
скоростей. Составим пропорции:
 ;
;
 ;
;
Из
пропорций следует что:
 .
.
 .
.
На
плане скоростей, скорость центра масс кривошипа изображается
в виде прямой  и откладывается на отрезке прямой из полюса плана скоростей, скорость изображается отрезком прямой
и откладывается на отрезке прямой из полюса плана скоростей, скорость изображается отрезком прямой  и откладывается на прямой отрезка
и откладывается на прямой отрезка  , далее из полюса плана скоростей проводится прямая до
пересечения с найденной точкой. Скорости центров масс изображаются на чертеже в
масштабном коэффициенте.
, далее из полюса плана скоростей проводится прямая до
пересечения с найденной точкой. Скорости центров масс изображаются на чертеже в
масштабном коэффициенте.
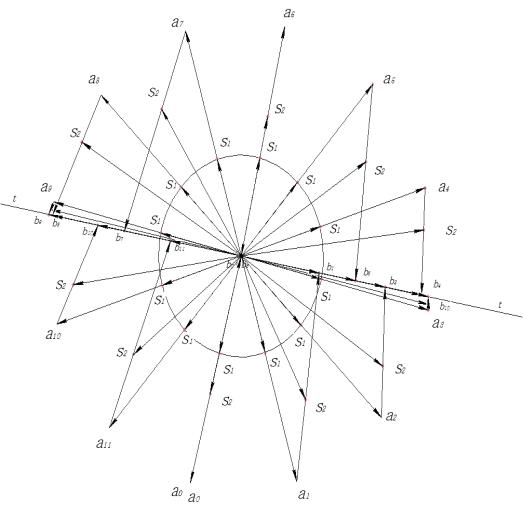
Рис.
4. План скоростей
Выполним
модульный расчёт скоростей и частоты, рассмотрим в качестве примера первое
положение
BA = a1b1∙μv =87,56
мм*0,05 =4,4 м/с;
=4,4 м/с;
VB = pvb1∙μv
=41,18 мм*0,05 =2,1м/с;
VS1
= pvs1∙μv =42
мм*0,05=2,1м/с;
VS2
= pvs2∙μv =68,13
мм*0,05=3,4м/с;
 1/с.
1/с.
Проведём
аналогичные расчёты для остальных 11-ти положений:
Таблица
2.
|
Скорость № п/п
|
VA
|
VBA
|
VB
|
VS1
|
VS2
|
ω2
|
|
м/с
|
1/c
|
|
0
|
4,9
|
4,9
|
0
|
2,1
|
3,0
|
17,5
|
|
1
|
4,9
|
4,4
|
2,1
|
2,1
|
3,4
|
15,7
|
4,9
|
2,7
|
3,8
|
2,1
|
4,3
|
9,6
|
|
3
|
4,9
|
0,3
|
4,9
|
2,1
|
4,9
|
1,1
|
|
4
|
4,9
|
2,2
|
4,8
|
2,1
|
4,7
|
7.9
|
|
5
|
4,9
|
4,1
|
3,0
|
2,1
|
3,7
|
14,6
|
|
6
|
4,9
|
4,9
|
0
|
2,1
|
3,0
|
17,5
|
|
7
|
4,9
|
4,4
|
3,1
|
2,1
|
3,7
|
15,9
|
|
8
|
4,9
|
2,8
|
5,0
|
2,1
|
4,7
|
10,0
|
|
9
|
4,9
|
0,4
|
5,1
|
2,1
|
4,9
|
1,6
|
|
10
|
4,9
|
2,3
|
3,8
|
2,1
|
4,3
|
8,2
|
|
11
|
4,9
|
4,2
|
1,9
|
2,1
|
3,4
|
15,0
|
жесткий рычаг силовой кинематический
Расчёт ускорений методом планов будет проводится для
двух положений механизма рабочего хода 4-5. В качестве примера будет
рассмотрено 4-е положение механизма.
Для начала необходимо определить ускорение точки А, учитывая что кривошип
вращается с постоянной угловой скоростью, тогда воспользуемся формулой[1-2]:
аА = ω12lОА
=(70)2 *0,07м=343 м/с2.
*0,07м=343 м/с2.
Далее
составим векторное уравнение и решим его графически
 , (1.4.1)
, (1.4.1)
Для того что бы решить это уравнение графически, необходимо определится с
направлением ускорений и масштабным коэффициентом, необходимо заметить что для
каждого плана масштабный коэффициент высчитывается свой, с таким же условием,
что бы он был целым числом или простой десятичной дробью.
Переносное
ускорение точки В (аА) направлено параллельно кривошипу в
рассматриваемом положении. Нормальное ускорение  параллельно
шатуну, из точки В в точку А, а тангенциальное ускорение
параллельно
шатуну, из точки В в точку А, а тангенциальное ускорение  направленно перпендикулярно АВ. Ускорение
направленно перпендикулярно АВ. Ускорение  направлено параллельно направляющей ползуна. Определим масштабный коэффициент:
направлено параллельно направляющей ползуна. Определим масштабный коэффициент:

 .
.
Отрезок
 будет одинаковым для всех положений
будет одинаковым для всех положений
Нормальное
ускорение рассчитывается по формуле:
аnВА
= ω22 =(8)2*0,28=17,7/с2
=(8)2*0,28=17,7/с2
При
построении плана ускорений необходимо:
)
На свободном поле чертежа поставить полюс плана ускорений 
)
Из полюса плана ускорений откладываем отрезок ,параллельно
отрезку ОА4.
)
Далее необходимо найти отрезок n4a4 . Для
этого воспользуемся формулой:
n4a4=  .
.
)
Откладываем отрезок n4a4 параллельно
А4В4 из точки a4
5)
Из точки n4 проводим
перпендикуляр до пересечения с прямой t-t ,данный
отрезок является тангенциальной составляющей ускорения
6) Из полюса pa проводим прямую параллельно направляющей t-t до
пересечения с перпендикуляром отрезка тангенциальной составляющей ,найденный
отрезок является точкой b4.
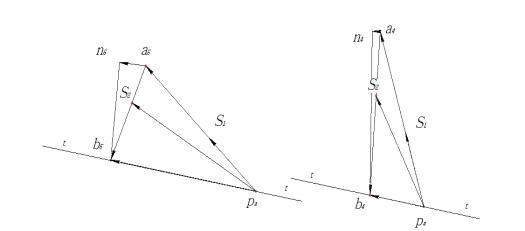
Рис.
5. План ускорений
Так
же необходимо определить положения центров масс ускорений, для этого составим
пропорции:
 ;
;
 ;
;
Отсюда
следует что:
 мм;
мм;
 мм;
мм;
Полученные
отрезки откладываем на плане ускорений. 1)Ускорение центра масс откладываем из
полюса  получим точку S1.2) Ускорение S2 откладывается на отрезке
получим точку S1.2) Ускорение S2 откладывается на отрезке  .
.
Далее
приведём расчёты оставшихся ускорений:
аτBA = n4b4∙μa =
76,78*4= 307,1 м/с2;
aBA = a4b4∙μa =
76,91*4= 307,6м/с2;
aB = pаb4∙μa =
31,17*4= 124,7м/с2;
aS1 = pas1∙μa = 36,75 *4= 147 м/с2.S2 = pas2∙μa = 58,61*4= 234,4 м/с2
 1/с2
1/с2
Таблица
3
|
Ускорение № п/п
|
aA
|
anBA
|
aτBA
|
aBA
|
аS1
|
aS2
|
aB
|
ε2
|
|
м/с2
|
1/с2
|
|
4
|
343
|
17,7
|
307,1
|
307,6
|
147
|
234,4
|
124,7
|
1097
|
|
5
|
343
|
60,3
|
184,2
|
193,8
|
147
|
326,3
|
334,7
|
658
|
2. Силовой расчет механизма
В ходе силового расчёта механизма, так же будут рассмотренны 4-е и 5-е
положения механизма: их схемы нагружения, действующие на них силы,
уравновешивающий моменты и реакции. Так же необходимо отметить что силовой
расчёт выполняется именно для тех положений, которые были рассмотрены в плане
ускорений. Непосредственно сам расчёт выполняется 2-мя методами 1) Методом
планов и 2) Методом рычага Жуковского
Выполним силовой расчёт методом планов, для этого необходимо построить
диаграмму сил полезного действия. Для построения диаграммы сил полезного
действия необходимо:
) Определить масштабный коэффициент.

Где  длина определяемая произвольно (в диапазоне от 40 до 60) мм.
длина определяемая произвольно (в диапазоне от 40 до 60) мм.
)Диаграмма строится над(под) направляющей t-t таким образом
что бы ось абсцисс располагалась параллельно направляющей.
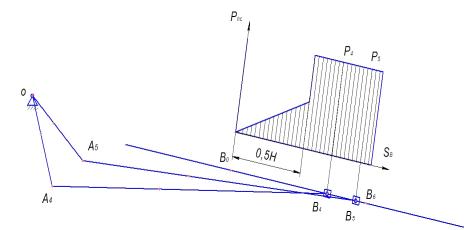
Рис. 6. Диаграмма усилий на ползуне
Н=100,26мм => 0,5Н=50,13мм.
) На диаграмме понятно, что для того что бы определить силы полезного
сопротивления необходимо от точек рассматриваемых положений, перпендикулярно
направляющей t-t провести прямые, длины которых мы ранее определили (РПС=РПС4=РПС5)
Далее необходимо построить схему нагружения структурной группы.
2.1 Силовой расчет
структурной группы методом планов
Для начала определим величины, необходимые в дальнейших расчётах.
Сила притяжения направление на схеме всегда
вертикально вниз
2 = m2g =0,63кг*9,8(м/с2)=6,17Н;
G3 = m3g =0,25 кг*9,8(м/с2)=2,45Н,
где g -
ускорение свободного падения.
Для того что бы определить силы инерции звеньев
необходимо воспользоваться методом замещения точечных масс, для этого шатун
заменим двумя точечными массами mA2,
mB2 расположенные в центре шарниров А и
В, Точечные массы mA2, mB2 находятся по формулам:
 ;
;
 .
.
Определим силы инерции замещающих масс по формулам:
РиА2 = mА2aА =0,38кг*343м/с2=131,81 Н;
РиВ2 = mВ2aВ =0,25 кг* 124,7м/с2= 30,86Н;
Сила инерции ползуна:
Ри3 = m3aB = 0,25 кг* 124,7м/с2=
31,17 Н,
Далее
составим схему нагружения. Для определения сил действующих в кинематических
парах структурной группы, необходимо обозначить все силы и реакции связей
действующие на механизм, а именно: силы тяжести G2 и G3;
силы инерции  ,
,  , и
, и  ; силу полезного сопротивления РПС и
реакции связей реакции связей R12, R03. (R03-сила
с которой стойка действует на шатун).
; силу полезного сопротивления РПС и
реакции связей реакции связей R12, R03. (R03-сила
с которой стойка действует на шатун).
На
схеме нагружения силы изображаются отрезками произвольной длины, но строго
выдерживается их направление.
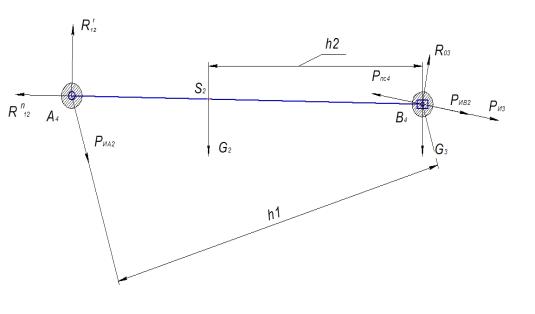
Рис. 7. План сил
На
схеме направление сил тяжести G2 и G3 всегда
перпендикулярно вниз, точками приложения являются, центр масс S2 и точка B (в рассматриваемом положении
точка B4). Линия
действия реакции R03 направлена перпендикулярно направляющей t-t
ползуна. Направление и величина реакции R12 на данном этапе расчёта
не известна. Реакцию R12 раскладываем на составляющие: нормальную  и тангенциальную
и тангенциальную  :
:
→ → →
R12 = Rn12 + Rτ12.
Составляющая
направлена вдоль шатуна, а - перпендикулярно АВ.
Силы
инерции определяются методом замещающих точечных масс. В соответствии с которым
масса шатуна разносится в центре шарниров А и В. Сила инерции РИА2
приложена в точке А шатуна и направлена противоположно ускорению аА
точки А, силы РИВ2 и РИ3 направлены противоположно
ускорению аВ точки В шатуна. Сила РИВ2 приложена в точке
В шатуна, а РИ3 - в точке В ползуна.
Под
действием указанных сил и реакций, рассматриваемая структурная группа находится
в равновесии. Из условия равновесия системы сил действующих на шатун следует,
что сумма моментов сил действующих на шатун относительно точки В равна нулю.
Отсюда следует что 
Из
условия равновесия системы сил действующих на шатун определим рекцию :
 ;
;
Отсюда
следует что:
 ,
,
где
 и
и  - плечи
сил
- плечи
сил  и
и  ,
измеряются в мм на схеме нагружения.
,
измеряются в мм на схеме нагружения.

 (2.1)
(2.1)
Запишем
векторное уравнение(2.1) условия равновесия сил и решим его графически:
Для
этого необходимо:
1) Выбрать масштабный коэффициент:

где
 - длина отрезка, которым сила полезного сопротивления
изображается на плане сил.
- длина отрезка, которым сила полезного сопротивления
изображается на плане сил.
)
Длины отрезков необходимых для изображения в масштабном коэффициенте, находятся
путём деления на масштабный коэффициент. Длины отрезков входящие в диапазон от
0 до 2мм изображаться не будут.
)
Последовательно изобразим реакции: 1), 2) РИА2,
3) РИВ2 параллельно t-t, 4) РИ3 параллельно t-t, 5)
РПС4 параллельно t-t. Далее необходимо с конца отрезка силы полезного
сопротивления отложить перпендикуляр и от начала отрезка тангенциальной
реакции, так же отложить перпендикуляр, пересечением этих 2-х перпендикуляров и
будет точка приложения реакции R03. От
точки R03
проведём 2-е прямые до пересечения с началом и концом отрезка, Полученные прямые являются реакциями и 
Точку
приложения реакции  определяем по условию равновесия системы сил,
действующих на ползун. Линии действия сил РПС4, G2, РИА2,
РИ3 проходят через геометрическую ось шарнира В
определяем по условию равновесия системы сил,
действующих на ползун. Линии действия сил РПС4, G2, РИА2,
РИ3 проходят через геометрическую ось шарнира В
В
связи с этим:

Реакция
не равна нулю, следовательно, размер . Таким образом, при центральном расположении шарнира
В на ползуне линия действия реакции проходит
через его геометрический центр.
. Таким образом, при центральном расположении шарнира
В на ползуне линия действия реакции проходит
через его геометрический центр.
Расчет
модулей искомых реакций:




Рис. 8. План сил для положения 4.
Исходя из данных рисунка можно узнать направление не
известных ранее реакций.
2.2 Силовой расчет кривошипа
методом планов
Расчёт
кривошипа методом планов, очевидно схож с пред идущим расчётом в данном
курсовом проекте. Отличие заключается в том что помимо действующих сил: тяжести
 ; инерции
; инерции  ; реакции
; реакции
 и
и  , система
сил уравновешивается сил парой сил с моментом
, система
сил уравновешивается сил парой сил с моментом  .
.
Определим силу тяжести кривошипа:


Так же как и для расчёта сил инерции шатуна, заменим кривошип двумя
точечными массами mА1 и mО1, расположенными в центрах
шарниров А и О соответственно.



Силы инерции замещающих масс [1-3]:


Так как стойка неподвижна, следовательно:

Реакция
, действующая со стороны шатуна на кривошип, на данном
этапе расчета известна. Она связана с реакцией ,
величина и направление которой определены при силовом расчете структурной
группы, следующим соотношением:
Под действием указанной на схеме нагружения системы сил кривошип
находится в равновесии, следовательно:



Реакция
 определяется в ходе решения векторного уравнения
определяется в ходе решения векторного уравнения


Рис. 9. Схема нагружения кривошипа
План сил, действующих на кривошип, приведен на рис. 10. На плане сил не
отображена сила тяжести  т.к. значение силы не большое, силой можно пренебречь.
т.к. значение силы не большое, силой можно пренебречь.
Масштабный коэффициент плана сил:

Величина
реакции :

Результаты
силового расчета методом планов для рассматриваемых положений механизма
приведены в таблице 3.

Рис. 10. План сил, действующих на кривошип
Таблица 4.
|
Сила №п/п
|
РиА1
|
РиА2
|
РиВ2
|
Ри3
|
  R12R03R01РпсМур R12R03R01РпсМур
|
|
|
|
|
|
|
|
Н
|
Нм
|
|
4
|
30,87
|
131,81
|
30,86
|
31,17
|
1764,60
|
129,18
|
1769,40
|
281,70
|
1667,40
|
1850
|
120,33
|
|
5
|
|
|
82,84
|
83,68
|
1687,05
|
83,26
|
1689,15
|
125,25
|
1665,60
|
|
75,93
|
2.3 Определение
уравновешивающей силы методом «жесткого рычага» Н.Е. Жуковского
Рычаг
Н.Е. Жуковского - повернутый на 90о план скоростей, нагруженный
внешними силами, действующими на звенья механизма, включая силы инерции и
уравновешивающие силы  .
.
Для
построения схемы нагружения рычага Н.Е. Жуковского в рассматриваемом положении
механизма изображаем повернутый на 90о план скоростей (направление
его поворота на результат расчета не влияет). В соответствующие точки плана со
схем нагружения структурной группы (Рис. 7) и кривошипа (Рис. 9) параллельно
самим себе переносятся силы тяжести, инерции, полезного сопротивления и
прикладываются уравновешивающие силы ( ).
).
Для
4-го положения механизма рычаг Н.Е. Жуковского показан на рис. 11. Под
действием указанных сил рычаг находится в равновесии, т.е. сумма моментов сил
относительно точки  его закрепления равна нулю.
его закрепления равна нулю.

Рис. 11. Схема нагружения рычага Н.Е. Жуковского




Расхождение результатов, полученных методом планов и методом рычага Н.Е.
Жуковского:

Аналогичные действия выполним для 5-го положения
Поменяем лишь направление уравновешивающей силы




2.4 Статическое уравновешивание механизма
Цель статического уравновешивания механизма - уменьшение его переменного
силового воздействия на фундамент [1-3].
Силы, действующие на фундамент зависят от сил технологических (или
производственных), сил тяжести и сил инерции.
Задача статического уравновешивания - определение параметров противовесов
(масс противовесов и радиусов их установки).
На практике наиболее часто выполняется неполное статическое
уравновешивание кривошипно-ползунного механизма, при котором на кривошип
устанавливается один противовес массой тП на расстоянии lOC от оси О вращения (рис. 12).
Звено 1 заменим массами тА1 и тО1, звено 2 -
массами тА2 и тВ2. Масса тО1 неподвижна и не
оказывает дополнительного переменного воздействия на корпус. Подвижные массы тА1
и тА2 уравновешиваются противовесом тП. Параметры
противовеса должны удовлетворять условию:

Где:  ;
;  ;
;  ;
;
 ;
;
где
 - радиус установки противовеса, его величина
выбирается конструктивно.
- радиус установки противовеса, его величина
выбирается конструктивно.





Рис.
12. Схема установки противовесов
Для
нахождения реакции R01
Используем уравнение:  . Данное уравнение будет решено графически ниже.
. Данное уравнение будет решено графически ниже.
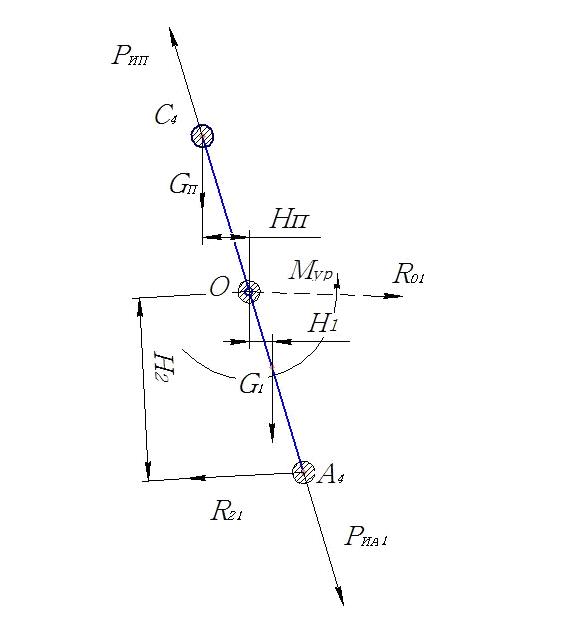
Рис. 13. схема нагружения кривошипа
Обозначим все силы действующие на механизм. Из схемы изображенной на рис.
13 Составим уравнение равновесия и найдём уравновешивающий момент:
 ;
;
 .
.
Для 4-го положения:

Для 5-го положения:

Для
нахождения реакции R01
Используем уравнение: .Данное уравнение будет решено графически.
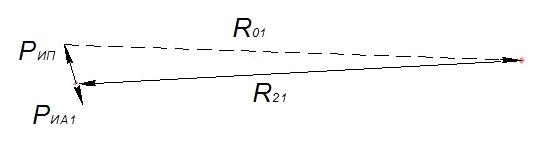
Рис. 14. План сил.
Величина
реакции :

Для
4-го положения  H и для 5-го
положения
H и для 5-го
положения  H
H
Это
позволяет сказать, что для 4-го положения увеличилась
на 8,12%, а для 5-го положения на 8,33 %.
Заключение
Исходя из задания курсовой работы был проведен структурный анализ
механизма по принципу Ассура. Определена его подвижность и составлена формула
его строения.
Методом планов выполнен кинематический расчет механизма. Методом планов
определены скорости звеньев и точек звеньев 12 положений механизма, расчет
линейных и угловых ускорений произведен для двух положений рабочего хода (4 и
5), в которых сила полезного сопротивления больше 0.
В ходе выполнения силового расчета была построена диаграмма изменения
силы полезного сопротивления, определены реакции в кинематических парах и
уравновешивающий момент. Величина последнего определялась методом планов и
методом рычага Н.Е. Жуковского. Расхождение результатов расчета составило 0,86%
и 6,29% соответственно для 4 и 5 положений.
Был
построен кривошипно-ползунковой механизм, при котором на кривошип
устанавливается противовес массой  , в ходе
построения плана сил, графически была получена реакция , которая после установки противовеса уменьшилась на
8,12% для 4-го положения и на 8,33 % для 5-го положения.
, в ходе
построения плана сил, графически была получена реакция , которая после установки противовеса уменьшилась на
8,12% для 4-го положения и на 8,33 % для 5-го положения.
Список литературы
1.
Артоболевский И. И. Теория механизмов и машин / И.И. Артоболевский. - М.:
Наука, 1975.- 640 с.
2. Рязанцева И.Л. Теория механизмов и машин в вопросах и ответах / И.Л.
Рязанцева - Омск: Изд-во ОмГТУ, 2013. - 130с.
. Силовой расчет механизмов: Учебное пособие. Под ред. Н.В. Фролова.
Изд-во МВГТУ, 1991. -78с: ил.
4. Рязанцева
И.Л. Образец составления пояснительной записки курсового проекта.
. Рязанцева
И.Л. Конспект лекций