Моделирование кинематических и динамических характеристик разгона колесного трактора с системой топливоподачи CommonRail
БЕЛОРУССКИЙ
НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Автотракторный
факультет
Кафедра
«Тракторы»
КУРСОВАЯ
РАБОТА
по
дисциплине «Математическое моделирование»
Моделирование
кинематических и динамических характеристик разгона колесного трактора с системой
топливоподачи CommonRail
Минск
2015
38 стр., 12 рис., 1 табл., 9источн.,
Моделирование кинематических и динамических
характеристик разгона колесного трактора с системой топливоподачи CommonRail
Объект исследования -- колесный трактор оснащенный
системой топливоподачи CommonRail
В ходе исследования была изучена конструкция
трактора «Беларус-1025.4», а также методы и приборы, позволяющие
экспериментально определить величину угловых скоростей отдельных частей
трансмиссии трактора. Из нормативных документов найдены параметры, которые
служат критерием и основными данными для исследования разгона.
В результате разработки настоящего курсового
проекта были выведены и построены (в пакете Delphi) существенные параметры
разгона трактора с учетом системы топливоподачи CommonRail».
трактор разгон трансмиссия
топливоподача
1.Введение
Способность тракторного агрегата к троганию с
места и быстрому разгону - существенное динамическое качество, приобретающее
все большее значение в связи с повышением энергонасыщенностей и скоростей
движения и расширением использования тракторов на транспортных работах. В
начальный период движения тракторного агрегата с ускорением он преодолевает
наряду с силами сопротивления движению также дополнительную инерционную нагрузку,
под воздействием которой частота вращения коленчатого вала двигателя может
понизиться настолько, что разгон агрегата окажется невозможным (двигатель
остановится). Поэтому при исследовании процесса разгона тракторного агрегата
необходимо оценить возможность осуществления разгона и продолжительность
разгона до требуемой скорости.
В зависимости от типа трансмиссии разгон
тракторного агрегата до заданной скорости может осуществляться без переключения
передач либо поэтапно, т. е. путем последовательного перехода от низших передач
на более высокие без потерь накопленной агрегатом кинетической энергии в
процессе переключения передач. Трогание с места и разгон тракторного агрегата в
тяжелых условиях осуществляется в такой последовательности. При установке всережимного
регулятора в положение полной подачи топлива и работе двигателя при
максимальной угловой скорости холостого хода водитель включает требуемую
передачу в коробке и плавно отпускает педаль сцепления. По мере увеличения
момента трения в сцеплении двигатель нагружается, уменьшается частота вращения
его вала, регулятор увеличивает подачу топлива в цилиндры, и развиваемый
двигателем крутящий момент возрастает. Трогание с места агрегата определяется
равенством момента трения сцепления и приведенного к коленчатому валу момента
сопротивления движению тракторного агрегата.
Для первого периода разгона тракторного агрегата
характерно буксование сцепления, причем его момент трения является ведущим для
разгоняемых элементов сцепления и тормозным для двигателя. Под воздействием
этого момента увеличивается угловая скорость ведомых элементов сцепления и
скорость поступательного движения тракторного агрегата, а угловая скорость
коленчатого вала снижается.
Второй период разгона начинается в момент
выравнивания угловых скоростей коленчатого вала и ведомого вала сцепления, т.
е. в момент окончания буксования дисков сцепления. В течение этого периода
разгона происходит нарастание общей угловой скорости коленчатого вала и вала
сцепления и, следовательно, поступательной скорости тракторного агрегата.
Разгон агрегата заканчивается тогда, когда будет полное соответствие между
скоростью движения и частотой вращения вала двигателя при моменте двигателя,
равном приведенному моменту сопротивления агрегата.
После достижения крутящим моментом номинального
значения работа двигателя переходит на безрегуляторную ветвь характеристики. На
диаграмме эта ветвь представлена прямой, т. е. принято, что при работе
двигателя без регулятора крутящий момент также изменяется по линейному закону.
Однако на этом участке диаграммы разность между моментом трения сцепления и
крутящим моментом двигателя значительно больше, чем на участке диаграммы,
соответствующей регуляторной ветви характеристики, т. е. увеличение подачи
топлива в цилиндры обусловливается только действием корректора и происходит в
ограниченных пределах.
Объектом исследования является МТА на базе
универсально-пропашного колесного трактора MT3-1025.4 с системой топливоподачи
Commonrail.
2.Цель и задачи моделирования
Целью курсовой работы является исследование
математической модели и проведение расчетов на ЭВМ описывающих процесс трогания
и разгона трактора модели МТЗ-1025.4. Способность машинного агрегата к троганию
с места и быстрому выходу на заданную скорость движения является важнейшим эксплуатационным
качеством. В зависимости от типа трансмиссии трактора разгон агрегата до
заданной скорости может осуществляться без переключения передач либо путем
последовательного перехода от низших передач на более высокие. В курсовом
проекте будет рассмотрена простейшая математическая модель разгона машины.
Исходные данные к работе будут взяты из технических характеристик трактора
МТЗ-1025.4.
Методы проведения испытаний тракторов и
требования к окружающей среде изложены в ГОСТ 22576-90.
Задачами моделирования являются:
. Описание конструктивной схемы объекта
моделирования;
. Создание расчетной схемы объекта
моделирования, описание характеристик объекта;
. Математическое описание объекта моделирования
и задание начальных и граничных условий для моделирования;
. Составление алгоритма реализации задачи;
. Программная реализация задачи;
. Представление результатов расчета и их анализ;
. Исследование характеристик модели.
3.Конструктивная схема и описание объекта
моделирования

(Рисунок 1- МТЗ-1025.4)
Трактор МТЗ-1025.4(Рисунок 1) предназначен для
выполнения различных сельскохозяйственных работ с навесными, полунавесными и
прицепными машинами и орудиями, погрузочно-разгрузочных работ, работ на
транспорте, в растениеводстве, животноводстве и садоводстве.
Отличительные особенности
Обновленный дизайн, передний ведущий мост с
главной передачей, самоблокирующимся дифференциалом, конечными передачами,
дизель по выбросам вредных веществ соответствует экологическим требованиям
ступени StageIIIA.
Комплектация по заказу
Тормоза, работающие в масляной ванне;
Ходоуменьшитель; Комплект для сдваивания задних колес; Кондиционер;
Дополнительное сиденье; Тягово-сцепное устройство лифтового типа; Двухпроводный
пневмопривод; Пневмопривод комбинированный.
|
ДВИГАТЕЛЬ
Тип 4-х цилиндровый дизель с турбонаддувом и электронной системой впрыска
«CommonRail» Модель Д245S3AM/Д245S3A Мощность, л.с (кВт) 110.2(81.0)
Номинальная частота вращения, коленчатого вала, об./мин. 2200 Число
цилиндров, шт. 4 Диаметр цилиндров/ход поршня, мм 110 х 125 Рабочий объем,
л 4,75 Максимальный крутящий момент, Н м 430 Удельный расход топлива при
номинальной мощности, г/кВт•ч 235 Коэффициент запаса крутящего момента, %
25 Емкость топливного бака, л 250
|
РАЗМЕРЫ
И МАССА Общая длина, мм 4600 Ширина, мм 1970 Высота по кабине, мм 2820
Колесная база, мм 2570 Колея, мм: по передним колесам по задним колесам
1420-2000 1530-1800 Дорожный просвет, мм 450 Наименьший радиус поворота, м
4,6 Эксплуатационная масса, кг 4730 Размеры шин: передних колес задних
колес 360/70R24 18,4R34
|
.1Система впрыска CommonRail
Система впрыска CommonRail является современной
системой впрыска топлива дизельного двигателя. Работа системы CommonRail
основана на подаче топлива к форсункам от общего аккумулятора высокого давления
- топливной рампы (CommonRail в переводе общая рампа). Система впрыска
разработана специалистами фирмы Bosch.(Рисунок 2 ).
Если открыть автомобильный англо-русский словарь,
то термин CommonRail можно перевести как "общая магистраль". Она
характеризуется впрыском топлива в цилиндр под высоким атмосферным давлением,
благодаря чему снижается расход топлива на 15 процентов, а мощность двигателя
вырастает почти на 40 процентов.
Это не все достоинства. Было
отмечено уменьшения шума при работе двигателя, притом, что крутящий момент
дизеля был увеличен. Благодаря своему преимуществу, система впрыска CommonRail
приобрела широкую популярность, и на данное время, каждый второй автомобиль с
дизельным двигателем <#"870317.files/image002.jpg">
Рисунок 3)
состоит из трех основных частей:
контура низкого давления, контура высокого давления и системы датчиков.
(Рисунок 3 )
4.Расчетная схема объекта моделирования,
характеристики объекта моделирования и окружающей среды
.1Расчетная
схема объекта моделирования
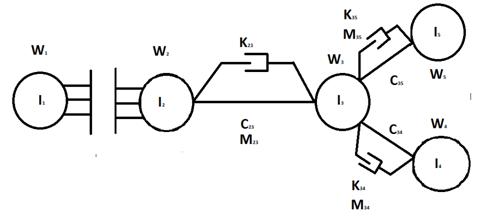
(Рисунок 4)- момент инерции двигателя- момент
инерции коробки передач- момент инерции главной передачи, I5- моменты инерции
ведущих колес
Мдв- крутящий момент двигателя
Мф- фрикционный момент-коэффициент демпфирования
Сii - крутильная жесткость вала
ωi-угловая скорость
Дифференциальные уравнения первого порядка
описывающие работу трансмиссии:

 )
)


 23=C23*(
23=C23*( 2-3)
2-3)
35=C35*(3-5)
34=C34*(3-4) =FK1+FK2-FКР-Ff
=FK1+FK2-FКР-Ff
Методы проведения испытаний
тракторов и требования к окружающей среде:
Трактор, предназначенный для
испытаний, должен быть укомплектованным, заправленным ГСМ в соответствии с
нормативной документацией.
Испытания проводятся на твердом,
гладком чистом участке дороги с хорошим сцеплением. При дорожных испытаниях
трактора должны соблюдаться следующие требования:
Скорость ветра не более 3 м/с. (при
порывах до 5 м/с.)
Плотность воздуха не должна
отличаться более чем 7/5 % от плотности воздуха, определенной при нормальных
атмосферных условиях (атмосферное давление 1000 кПа, температура воздуха 293
К). Плотность воздуха при нормальных условиях составляет 1,189 кг/м3
Температура воздуха 20ºС
5.Математическое описание объекта моделирования,
начальные и граничные условия
(Рисунок 5)
Испытания по оценке тягово-скоростных
свойствпроводятся при номинальной нагрузке и нормальных климатических условиях
на дорогах с асфальтобетонным покрытием.
Определение скоростной
характеристики разгона трактора с места на внешней скоростной характеристике
двигателя и выбега с максимальной скорости до полной остановки завершается
построением графиков зависимостей  .
.
Общее уравнение динамики системы
материальных точек имеет вид:
 (1)
(1)
 (2)
(2)
Исходя из этого получаем (3) и (4):
 ,
,  , (3)
, (3)
 ,
,  , (4)
, (4)
Кинетическая энергия трактора равна
(5):
 , (5)
, (5)
Уравнение Лагранжа 2-го рода запишем
в виде (6) и (7):
 , (6)
, (6)
 ,
,  , (7)
, (7)
В итоге получаем систему
дифференциальных уравнений (8) и (9):
 , (8)
, (8)
 ,
,  , (9)
, (9)
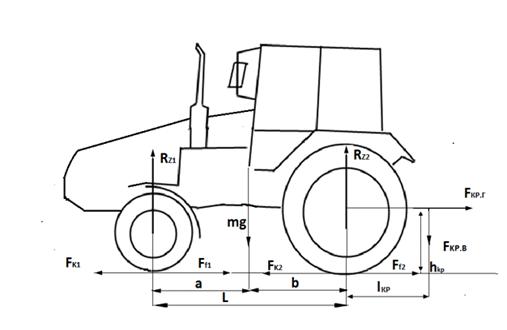
Примем направления и точки
приложения сил, действующие на трактор (рисунок 4.1).
Составим уравнения для реакций (10)
и (11):
 (10)
(10) , (11)
, (11)
Силы сопротивления качению (12) и
(13):
 , где (12)
, где (12)
 - коэффициент сопротивления качению
колеса 1.
- коэффициент сопротивления качению
колеса 1.
 , где (13)
, где (13)
 - коэффициент сопротивления качению
колеса 2.
- коэффициент сопротивления качению
колеса 2.
При разгоне сила сопротивления
воздуха очень мала, ею можно пренебречь.
Силы, приводящие в движение трактор
(14):
 (14)
(14)
φi- коэффициент сцепления колес
 -го моста с
опорной поверхностью;
-го моста с
опорной поверхностью;
 - коэффициент аппроксимации кривой
буксования
- коэффициент аппроксимации кривой
буксования
 -буксование колеса (15):
-буксование колеса (15):
 (15), где
(15), где
 -действительная скорость тракторного
агрегата;
-действительная скорость тракторного
агрегата;
 - угловая скорость ведущего колеса.
- угловая скорость ведущего колеса.
Определение крутящего момента:
Рисунок 5.1 - Скоростная
характеристика дизельного двигателя
При моделировании целесообразно
момент двигателя задавать согласно внешней скоростной характеристики,
представляющей собой графическую зависимость, крутящего момента Mдв от частоты
вращения, математическая модель которой имеет вид (16.1) и (16.2):
регуляторная ветвь, при
 (16.1)
(16.1)
в диапазоне 
 (16.2)
(16.2)
где,
 - минимально возможная угловая
скорость двигателя;
- минимально возможная угловая
скорость двигателя;
 - угловая скорость, соответствующей
максимальному значению крутящего момента двигателя;
- угловая скорость, соответствующей
максимальному значению крутящего момента двигателя;
 - соответствует максимальному
значению эффективной мощностиNe;
- соответствует максимальному
значению эффективной мощностиNe;  - угловая скорость при холостом
ходе;
- угловая скорость при холостом
ходе;
 - крутящий момент, соответствующий
Ne.
- крутящий момент, соответствующий
Ne.
В данных выражениях коэффициенты a,
b и c определяются следующим образом (17.1), (17.2), (17.3):
 (17.1)
(17.1)
 ; (17.2)
; (17.2)
 (17.3)
(17.3)
Значения коэффициентов приспособляемости
выбирают из диапазона kw=1,45...2;
kм=1,1...1,5 на основе экспериментально полученных характеристик.
Дифференциальное уравнение движения
трактора будет иметь вид (18):
, (18)
Для расчетной модели получаем
следующую систему уравнений:
.при пробуксовке сцепления


. при замкнутом сцеплении

 ,
,
Рассмотрим пять наиболее важных
этапов при процессе разгона трактора:
Сцепление выключено, двигатель
работает с постоянной угловой скоростью. Машина неподвижна.
Сцепление включается. Его момент
достигает величины Mсопр. Машина неподвижна; угловая скорость двигателя
снижается.
Момент сцепления Mф выше момента
сопротивленияMсопр. Машина трогается, угловая скорость двигателя снижается.
Момент фрикциона (сцепления) имеет
максимальное значение. Машина разгоняется; угловая скорость двигателя
снижается; угловая скорость колес увеличивается. В конце данной фазы происходит
выравниваниеωдв иωк, то есть
сцепление замыкается.
На данной фазе происходит увеличение
угловой скорости двигателя и машины до некоторого установившегося значения.
Моделирование характеристик
дизельного двигателя с системой топливоподачи CommonRail.
Сцепление выключено, двигатель
работает с постоянной угловой скоростью. Машина неподвижна.
Сцепление включается. Его момент
достигает величины Mсопр. Машина неподвижна; угловая скорость двигателя
снижается.
Момент сцепления Mф выше момента
сопротивленияMсопр. Машина трогается, угловая скорость двигателя снижается.
Момент фрикциона (сцепления) имеет
максимальное значение. Машина разгоняется; угловая скорость двигателя
снижается; угловая скорость колес увеличивается. В конце данной фазы происходит
выравниваниеωдв иωк, то есть
сцепление замыкается.
На данной фазе происходит увеличение
угловой скорости двигателя и машины до некоторого установившегося значения.
6.Алгоритм реализации задачи
ВоспользовавшисьГОСТ 19.701-90 представляю
алгоритм реализации задачи в виде блок-схемы (рисунок 5.1)
Рисунок 5.1- Схема алгоритма главной программы
7.Программная реализация задачи
ВсредеDelphi
{ Private declarations }
{ Public declarations };:
TForm1;Unit2;
{$R *.dfm}=array[1..6] of
extended;=array[1..5] of extended;=array of array of extended;,I2,I3,I4,I5:
extended;,r2,u1,u2,KPD1,KPD2,k23,k36,k34,k35,k,t:extended;,Mf,Fk1,Fk2,mx:extended;,M34,M35,M36,Fkr,Fkr1,Fkr2,Mcpr,f1,f2:extended;,Mdv0,Mdvn,wMdvn,wMdvmax,Mdvmax,wmax,a,d,c,kw,km:extended;,Mfmax,tmax,kfric:extended;,Ff2,Rz1,Rz2,fc1,M,K2,d2,fmax,k1,l1,l2,ht,e23:extended;:
TextFile;MOMENT(w:extended;varMdv:extended);:=1.1;:=2;:=(km*kw*(2-kw)-1)/(kw*(2-kw)-1);:=-(2*kw*(km-1))/(kw*(2-kw)-1);:=((kw*kw)*(km-1))/(kw*(2-kw)-1);(w>=w0)
and (w<wMdvn) then:=Mdvn*(a+(d*(w/wMdvn))+(c*((w/wMdvn)*(w/wMdvn))));(w>=wMdvn)
and (w<=wMdvmax)
then:=Mdvn*((wMdvmax-w)/(wMdvmax-wMdvn));;MOMENT_FRIC(t:extended;varmf:extended);:=MFmax*(1-exp(-kfric*t));;Disel(n:integer;
t1:extended; var x,x1:massiv1);(x[1],Mdv);_fric(t1,Mf);abs(x[1]-x[2])>0.1
then[1]:=(Mdv-Mf)/I1;[2]:=(Mf-M23-k23*(x[2]-x[3]))/I2;[1]:=(Mdv-M23-k23*(x[1]-x[2]))/I1;[2]:=x1[1];;[3]:=(M23+k23*(x[2]-x[3])-M34+k34*(x[3]-x[4])+M36+k36*(x[3]-x[5]))/I3;[4]:=(M34+k34*(x[3]-x[4])-Fk1*r1/(u1*KPD1))/I4;[5]:=(M35+k35*(x[3]-x[5])-Fk2*r2/(u2*KPD2))/I5;x[4]>0
then d2:=1-(x[6]*U1)/(x[4]*R1)d2:=0;d2>1 then d2:=1;d2<0 then
d2:=0;:=(l2*M*9.81-ht*x1[6]-0.8*Fkr1-0.8*Fkr2-Mcpr)/(l1+l2);:=(l1*M*9.81-ht*x1[6]-0.8*Fkr1+(l1+l2+0.8)*Fkr2-Mcpr)/(l1+l2);:=f1*Rz1*r1+f2*Rz2*r2;:=Rz1*fmax*(1-exp(-d2*k1));:=Rz2*fmax*(1-exp(-d2*k1));[6]:=(Fk1+Fk2-Ff1-Ff2)/M;;Rks(n:integer;
var h,t1,th:extended; var y,yh,z,d:massiv1; a:massiv2);,i:integer;i:=1 to n
do:=t1;[i]:=y[i];[i]:=y[i];;j:=1 to 4 do(n,th,d,z);:=t1+a[j];i:=1 to n
do[i]:=yh[i]+a[j+1]*z[i]/3;[i]:=y[i]+a[j]*z[i];;;;
TForm1.BitBtn1Click(Sender:
TObject);,t1,th,s:extended;,i,g:integer;,x1,xh,z,d:massiv1;:massiv2;:=
'.';:=2.5;:=530;:=1500;:=StrToFloat(LabeledEdit1.Text);:=StrToFloat(LabeledEdit2.Text);:=StrToFloat(LabeledEdit3.Text);:=StrToFloat(LabeledEdit4.Text);:=StrToFloat(LabeledEdit5.Text);:=StrToFloat(LabeledEdit6.Text);:=StrToFloat(LabeledEdit7.Text);:=StrToFloat(LabeledEdit8.Text);:=StrToFloat(LabeledEdit9.Text);:=StrToFloat(LabeledEdit10.Text);:=StrToFloat(LabeledEdit11.Text);:=StrToFloat(LabeledEdit12.Text);:=StrToFloat(LabeledEdit13.Text);:=StrToFloat(LabeledEdit14.Text);:=StrToFloat(LabeledEdit15.Text);:=StrToFloat(LabeledEdit16.Text);:=StrToFloat(LabeledEdit17.Text);:=StrToFloat(LabeledEdit18.Text);:=StrToFloat(LabeledEdit19.Text);:=StrToFloat(LabeledEdit20.Text);:=StrToFloat(LabeledEdit21.Text);:=StrToFloat(LabeledEdit22.Text);:=StrToFloat(LabeledEdit23.Text);:=cos(30)*Fkr;:=cos(60)*Fkr;:=3.5;:=4.3;:=5.2;:=5.4;:=0.82;:=0.9;:=61.45;:=30.73;:=0.05;//целина:=f1;:=0;:=0;:=10;:=6;:=0.001;[1]:=h/2;[2]:=a[1];[3]:=h;[4]:=h;[5]:=a[1];[1]:=wmax;[2]:=0;[3]:=0;[4]:=0;[5]:=0;[6]:=0;.Series1.Clear;.Series2.Clear;.Series3.Clear;.Series4.Clear;.Series5.Clear;.Series2.Title:='Mдвиг';.Series3.Title:='Mфрик';.Series4.Title:='w1';.Series5.Title:='w2';(Fw,'Data.rez');(Fw);:=0;:=g+1;(n,h,t1,th,x,xh,z,d,a);x1[5]<0
then x1[5]:=0;x[6]<0 then x[6]:=0;x[2]<0 then x[2]:=0;x[5]<0 then
x[5]:=0;x[4]<0 then
x[4]:=0;[6]:=x[6]*60;.Series1.AddXY(t1,x[6]);.Series2.AddXY(t1,Mdv);.Series3.AddXY(t1,Mf);.Series4.AddXY(t1,x[1]);.Series5.AddXY(t1,x[2]);.Series6.AddXY(t1,x[1]);.LineSeries1.AddXY(t1,x[2]);.LineSeries2.AddXY(t1,x[3]);.LineSeries3.AddXY(t1,x[4]);.LineSeries4.AddXY(t1,x[5]);.StringGrid1.Cells[0,g]:=FloatToStrf(t1,fffixed,7,4);.StringGrid1.Cells[1,g]:=FloatToStrf(Mdv,fffixed,7,3);.StringGrid1.Cells[2,g]:=FloatToStrf(Mf,fffixed,7,3);.StringGrid1.Cells[3,g]:=FloatToStrf(x[1],fffixed,7,3);.StringGrid1.Cells[4,g]:=FloatToStrf(x[2],fffixed,7,3);.StringGrid1.Cells[5,g]:=FloatToStrf(x[3],fffixed,7,3);.StringGrid1.Cells[6,g]:=FloatToStrf(x[4],fffixed,7,3);.StringGrid1.Cells[7,g]:=FloatToStrf(x[5],fffixed,7,3);.StringGrid1.Cells[8,g]:=FloatToStrf(x[6],fffixed,7,3);.StringGrid1.Cells[9,g]:=FloatToStrf(Fk1,fffixed,7,3);.StringGrid1.Cells[10,g]:=FloatToStrf(Fk2,fffixed,7,3);.StringGrid1.Cells[11,g]:=FloatToStrf(x[6]*t1/2,fffixed,7,3);(Fw,Mdv:7:4,'
',Mf:7:3,' ',x[1]:7:3,' ',x[2]:7:3,' ',[3]:7:3,' ',x[4]:7:3,' ',x[5]:7:3,'
',x[6]:7:3,' ',:7:3,' ',Fk2:7:3,'
',x[6]*t1:7:3);.StringGrid1.RowCount:=g+1;i:=1 to n
do[i]:=xh[i];:=th;(t1>=tmax);
Form2.Label1.Caption:='Максимальная
скорость машины:';
Form2.Label2.Caption:=Form2.StringGrid1.Cells[8,g]+'
км/ч';.ShowModal;;TForm1.BitBtn2Click(Sender:
TObject);
begin;;.
.Исходные
данные для моделирования:
Моменты
инерции: I1=48.54 кг·м2; I2=27.4 кг·м2; I3=104.3 кг·м2;I4=41,3 кг·м2;I5=78,4
кг·м2
Податливость:
e23=3·10-31/Н*м2;
Характеристика
двигателя: ωdv0=104.7 об/с; ωmax=167.5 об/с; ωdvn=230.4 об/с;
Mdv0=370Н·м; Mdvmax=440Н·м;
Радиусы
колес: R1=0,6м R2=0.8 м;
Масса
машины: М= 4730 кг;
Габаритные
размеры (относительно центра тяжести):=2.2 м; l2=2,4 м; h=1.5 м.
Сцепление
колес с дорогой: fc1 = 0.67;
Коэффициент
буксования: k2 = 6.8;
Коэффициенты
полезного действия: КПД1 = 0.82;КПД2=0.9.
Шаг
по времени: h = 0.001 c.
Коэффициент
сопротивления качению: fc =0.1;
Коэффициент
запаса сцепления: β =2;
Передаточные
отношения: u1=61.45; u2=30.73
9.Результаты расчета и их анализ
Согласно ГОСТ 22576-90 максимальную скорость
определяют на передаче, обеспечивающей достижение наибольшей устойчивой
скорости движения. Математическая модель трогания и разгона исследуемой машины
позволила определить по заданным условиям скорость МТЗ-1025.4, которая достигла
10.796 км/ч за 10 с. (рисунок 6).
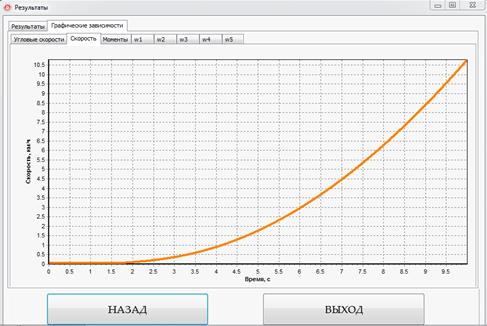
Рисунок 6.1 - График изменения скорости при
трогании и разгоне
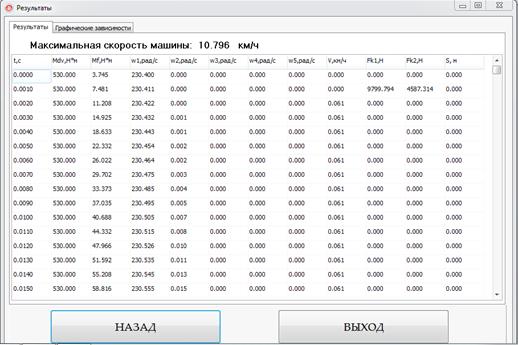
Рисунок 6.2 - Результат вычислений ЭВМ
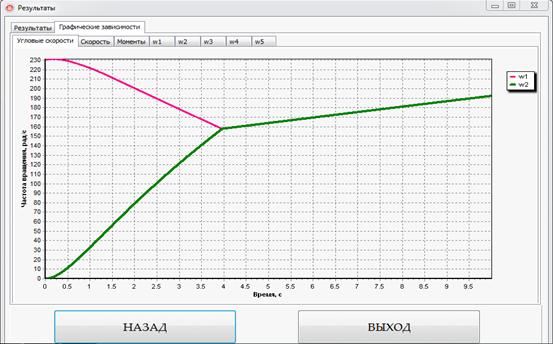
Рисунок 6.3 - График изменения угловой скорости
коленвала двигателя и первичного вала КП
Из графика видно, что замыкание сцепления
начинается через 4,15 секунды с начала старта, т. е. начинается второй период
разгона.

Рисунок 6.4 -Динамика ходовой системы трактора
Из графиков динамики ходовой системы трактора,
которые показаны на рисунке 6.4 видно, что нормальная нагрузка на передний мост
и нормальная нагрузка на задний мост после выхода трактора на установившийся
режим протекают по линейному закону.
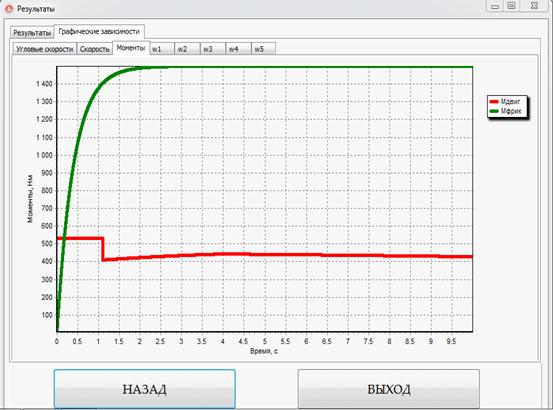
Рисунок 6.4 -График момента сцепления и момента
двигателя

Рисунок 6.5 -Диаграмма троганий и разгона МТА
10.Исследование характеристик модели
Полученная модель имеет достаточную точность для
приближенного исследования, однако значительное количество упрощений не
позволяют говорить о высокой точности модели. С учетом этого следует отметить
незначительные затраты времени на расчет с использованием данной модели.
Источником погрешностей данной математической
модели являются:неточность входных данных, приближенный характер используемых
вычислительных методов, округление при арифметических операциях.
Заключение
)Произведем проверку математической модели на
устойчивость, т.е. на степень нечувствительности мат. модели к изменению
входных параметров. Так, к примеру при изменении некоторых значений моментов
инерции, и принятого радиуса колеса, модель остается работоспособной. Не влияет
на работоспособность модели и изменение иных входных параметров, что говорит о
ее устойчивости.
) С использованием системы топливоподачи
CommonRailудалось добиться повышения крутящего момента двигателя. Атак же
уменьшить удельный расход топлива в 1.5 раза.
Список использованных источников
Тракторы:
Теория: Учебник для студентов вузов по спец. «Автомобили и тракторы» / В.В.
Гуськов, Н.В. Велев, Ю.Е. Атаманов и др.;-М.: Машиностроение, 1988. - 376с.
Моделирование
характеристик дизельного двигателя. Атаманов Ю.А. Плищ В.Н. Поварехо А.С.
Анилович,
В. Я. Конструирование и расчет сельскохозяйственных тракторов/ В.Я. Анилович,
Ю.Т. Володажченко. - 2-ое изд., переработ. и доп. М.: «Машиностроение», 1976. -
456 с.
Математическое
моделирование: Методические указания по выполнению практических и курсовых
робот для студентов специальностей 1-37 01 04 «Многоцелевые гусеничные и
колесные машины», 1-37 01 03 «Тракторостроение», 1-37 01 05 «Городской
электрический транспорт»/ В.П.Бойков, Г.П.Грибко, А.С.Поварехо, А.И.Рахлей;
БНТУ. Минск., 2009.-104с.
ГОСТ
22576-90. Автотранспортные средства. Скоростные свойства. Методы испытаний.
Методические
указания к лабораторным работам по курсу «Математическое моделирование» для
студентов специальностей I-37.01.03 «Тракторостроение», I-37.01.04
«Многоцелевые гусеничные и колесные машины», I-37.01.05 «Городской
электрический транспорт»/БНТУ. Минск., 2004.-37с.
ГОСТ
19.701-90. Схемы алгоритмов, программ, данных и систем. Обозначения условные и
правила выполнения.
Барский,
И.Б. Конструирование и расчёт тракторов / И.Б. Барский, В.Я. Анилович, Г.М.
Кутьков. - М.: «Машиностроение», 1973. - 280 с
Яблонский,
А.А. Курс теоретической механики / Л. М. Матюшина, В. З. Казакевич, М. И.
Козлова. - Москва: «Высшая школа»,1966. - 411с.