|
ПІД-регулятор по куту швидкості, поперечної
швидкості та поперечному зсуву.
|
Район плавання - підхід до Одеського порту, тип
судна - танкер, тип вантажу - баласт, метеорологічні умови плавання -
швидкість вітру до 10 м/с, видимість - 2000-3700 м. Час безперервної роботи
екіпажу - 1 міс. Кількість суден назустріч - 2.
|
2. математична модель системи управління рухом судна
в горизонтальній площини з урахуванням компенсації вітрового збурення на основі
закону управління
судно математичний моделювання
Імітаційна динамічна модель руху судна в горизонтальній
площини описується системою диференційних рівнянь, приведених до безрозмірної
форми та з урахуванням допустимих спрощень:

де - малий кут
дрейфу;, L - рекомендована повздовжня швидкість та довжина судна;
- малий кут
дрейфу;, L - рекомендована повздовжня швидкість та довжина судна;
α - керуємий кут повороту пера руля;
y , ψ - поперечний зсув та курс судна;
 -
приведена кутова швидкість судна;β , mω - проекції приведених вітро - хвильових збурюючих сил
та моментів;11, q21, r11, r21, s11,
s21, h1, b1, b2 - приведенні аеро-
та гідродинамічні коефіцієнти судна.
-
приведена кутова швидкість судна;β , mω - проекції приведених вітро - хвильових збурюючих сил
та моментів;11, q21, r11, r21, s11,
s21, h1, b1, b2 - приведенні аеро-
та гідродинамічні коефіцієнти судна.

Управління рухом судна по координатам поперечного зсуву та
курсу судна здійснюється двоканальними ПІД-регулятором, що керує кутом
швидкості, поперечної швидкості та поперечному зсуву. [3]:



де k1-9 - коефіцієнти ПІД-регулятора, що налагоджуються;
φ - кут швидкості судна,
Vy -
поперечна швидкість,
y - поперечний зсув.
Для моделювання й розрахунку параметрів руху судна біля Одеського
порту, основні рівняння запишуться як:
1. Управління по куту дрейфу β:
 ;
(3.3)
;
(3.3)
2. управління по кутовій швидкості ω,:
 ;
(3.4)
;
(3.4)
3. управління за курсом ψ:
 ;
;
4. управління за кутом швидкості:
 ,
,
5. Визначення швидкості VX й VY:
 ,
,
 .
.
Рівняння для регулятора руху судна записується враховуючи вид
закону регулювання, який використовуються в системі управління.
В даній курсовій роботі було використано ПІД-регулятор по
куту швидкості, поперечної швидкості та поперечному зсуву. Рівняння має вигляд:





k1-9- коефіцієнти підсилення для
регулятора.
. Рекурентна форма математичної моделі руху судна (за
методом кінцевих різниць) та сформувати початкові та граничні умови
Метод різницевої апроксимації є ітераційним, тобто
покроковим. Сутність його полягає в тому, що диференційне рівняння замінюється
різницевим.
Для цього  - представляємо у вигляді відрізків (а тобто
яких-небудь значень). Розіб’ємо ці відрізки на N
рівних частин точками
- представляємо у вигляді відрізків (а тобто
яких-небудь значень). Розіб’ємо ці відрізки на N
рівних частин точками 
 -
кроки.
-
кроки.
Будуємо сіточну область з просторовим кроками:  , та часовим
, та часовим  .
.

Похідна  замінюється різницевим аналогом:
замінюється різницевим аналогом:
 -
висхідна різниця;
-
висхідна різниця;
 -
низхідна різниця;
-
низхідна різниця;
 -
центральна різниця,
-
центральна різниця,
де  .
.
Друга похідна  замінюється:
замінюється:

Якщо прийняти  =1, отримаємо для різниці , n -
го порядку
=1, отримаємо для різниці , n -
го порядку

чи безпосередньо через значення різницевої функції [1]

де  - біноміальні коефіцієнти.
- біноміальні коефіцієнти.
При дослідженні неперервних систем n - порядку
використовують рівняння, які визначаються зв’язком між безперервною
функцією та її похідними.
При переході до різницевих рівнянь будемо мати
 ,
,
де  - відома функція;
- відома функція;
 -
розв’язок різницевого рівняння.
-
розв’язок різницевого рівняння.
Різницеве рівняння n-го порядку відповідає безперервному
диференційному рівнянню n-го порядку. Диференційне рівняння
можливо розглядати як граничне для різницевого, якщо прийняти період
дискретності  прямує до нуля.
прямує до нуля.
Будуємо рекурентну форму математичної моделі руху судна у
середовищі MATLAB за висхідною різницею.
(i+1)=(r11*w(i)+q11*b(i)+s11*vx(i)*a(i))*dt+b(i);
w(i+1)=(r21*vx(i)*w(i)+q21*vx(i)*b(i)+s21*vx(i)^2*a(i))
*dt+w(i); (i+1)=w(i)*dt+psi(i);(i+1)=(psi(i+1)-psi(i))-(b(i+1)-b(i))+fi(i);(i+1)=v*sin(fi(i+1));(i+1)=v*cos(fi(i+1));(i+1)=x(i)+vx(i+1)*dt;(i+1)=y(i)+vy(i+1)*dt;(i+1)=k1*(w(i+1)-w(i))+k2*(w(i+1)-w(i))/dt+k3*(sum(w(i+1)-w(i))*dt+k4*(Vy(i+1)-Vy(i))+k5(Vy(i+1)-Vy(i))/dt+k6*(sum(Vy(i+1)-Vy(i))*dt+k7*(y(i+1)-y(i))+k8*(y(i+1)-y(i))/dt+k9(sum(y(i+1)-y(i)))*dt;
Моделювання руху судна в звичайних (безаварійних) умовах за
допомогою ЕОМ.
Моделюємо рух судна в звичайних умовах у середовищі MATLAB.
clc;all;all;
· Прирощення часу=0.01;
· Кількість проходів по циклу=1000;
· Аеро- та гідродинамічні параметри
судна=-0.0341;=0.000232;=0.465;=0.00109;=0.00194;=0.000189;
· Швидкість судна=15;
· Коефіцієнти підсилення регулятору=20;========
· Початкові умови
w(1)=0.00001;(1)=50;(1)=0;(1)=0.002;=15;(1)=0.000001(1)=0.0001;(1)=5;(1)=0;(1)=0.0001;
· Цикл розв’язку задачіi=1:n-1
· Кут дрейфу
b(i+1)=(r11*w(i)+q11*b(i)+s11*vx(i)*a(i))*dt+b(i);
· Кутова швидкість судна
w(i+1)=(r21*vx(i)*w(i)+q21*vx(i)*b(i)+s21*vx(i)^2*a(i))*dt+w(i);
· Курс
psi(i+1)=w(i)*dt+psi(i);
· Кут швидкості
fi(i+1)=(psi(i+1)-psi(i))-(b(i+1)-b(i))+fi(i);
· Продольна та поперечна швидкість
vx(i+1)=v*sin(fi(i+1));(i+1)=v*cos(fi(i+1));
· Продольний та поперечний зсув
x(i+1)=x(i)+vx(i+1)*dt;
y(i+1)=y(i)+vy(i+1)*dt;
· Умови повороту судна
if (0<175.3)
psiz= 3.9095;
end;
if (175.3>291)
psiz=3.8921;
end;
if (291>370)
psiz=3.3336;
end;
· Кут дрейфу
a(i+1)=k1*(w(i+1)-w(i))+k2*(w(i+1)-w(i))/dt+k3*(sum(w(i+1)-w(i))*dt+k4*(Vy(i+1)-Vy(i))+k5(Vy(i+1)-Vy(i))/dt+k6*(sum(Vy(i+1)-Vy(i))*dt+k7*(y(i+1)-y(i))+k8*(y(i+1)-y(i))/dt+k9(sum(y(i+1)-y(i)))*dt;;
k=1:n;(1);(2,2,1);(k,psi);('курс');on;(2,2,2);(k,b);('угол
дрейфа');on;(2,2,3);(k,a);('угол поворота пера
руля');on;(2,2,4);(k,w);('угловая скорость');on;(2);(x,y);on;
Для моделювання руху судна було створено умови руху, за якими
судно у відповідний час змінювала курс, бо за проходженням по каналу біля міста
Очаків нам потрібно зробити поворот. Щоб цей поворот відповідав дійсності нам
потрібно хоч 2 разу змінити початковий курс. Так в програмі на відрізку часу
від 0 до 175,3 був встановлений курс 3,91, на відрізку часу від 175,3 до 291
був встановлений курс 3,89, на відрізку від 291 до 370 -3,33, що і дозволило
виконати плавний поворот.
4. графіки зміни всіх параметрів руху судна з часом.
Побудова траєкторії руху судна
Підбір коефіцієнтів


Рис.1. Перехідні характеристики першого набору коефіцієнтів

Рис.2. Траєкторія руху при першому наборі коефіцієнтів

Рис.3. Перехідні характеристики при другому наборі
коефіцієнтів

Рис.4. Траєкторія руху при другому наборі коефіцієнтів
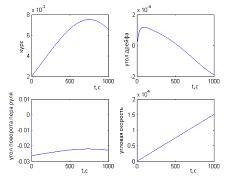
Рис.5. Перехідні характеристики при третьому наборі коефіцієнтів
Рис.6. Траєкторія руху при третьому наборі коефіцієнтів
Третій варіант коефіцієнта (k1=2.5, k2=2.3, k3=1.5, k4=4.1, k5=3.2, k6=1.6, k7=4.5, k8=3.7, k9=3.8) є найбільш оптимальними для перехідних
процесів.
Висновок
В даній курсовій роботі розглянуто основні теоретичні
відомості про системи управління судна, методи управління судном та математичну
модель управління рухом судна. В якості моделі обрано динамічну модель руху
судна в горизонтальній площині, що записується у вигляді системи диференційних
рівнянь, які приведені до безрозмірної форми з урахуванням допустимих спрощень.
Отримали модель руху судна за допомогою ПІД-регулятора за
кутом швидкості, поперечної швидкості та поперечному зсуву в програмному
середовищі MatLAB. Результатом роботи
розробленої програми є кут дрейфу судна в каналі та графіки перехідних процесів
основних показників руху судна (кута перекладки руля, кута дрейфу, курсу та
кутової швидкості). У результаті моделювання коефіцієнтами для ПІД-регулятора
обрали k1=2.5, k2=2.3, k3=1.5,
k4=4.1, k5=3.2, k6=1.6,
k7=4.5, k8=3.7, k9=3.8.
Було розроблено математичну модель системи управління рухом
судна в горизонтальній площини з урахуванням компенсації вітрового збурення на
основі закону управління.
ЛІТЕРАТУРА
1. Тимченко В.Л. Линеаризация уравнения динамики
заякоренного судна// Межведом. сб. научн. трудов «Судостроение» №37,
Киев-1988., СС.77-81.
2. Ткаченко А.Н. Судовые системы автоматического
управления и регулирования. - Л.: Судостроение, 1984. - 288с.
. Судовые устройства: Справочник / Под ред.
М.Н. Александрова. - Л.: Судостроение, 1987. - 656с.
. Катханов М.Н. Теория судових
автоматических систем. - Л.: Судостроение, 1985. - 375с.
. Матеріали попередньо виконаних лабораторних
робіт.