Исследование свойств автопилота 'Кремень-40'
Контрольная
работа
Исследование
свойств автопилота "Кремень-40"
1. Назначение автопилота и выполняемые функции
автопилот самолет кремень тангаж
Автопилот (в дальнейшем АП)
"Кремень-40" предназначен для пилотирования самолетов Як-40 и обеспечивает:
стабилизацию углов крена, курса и тангажа;
стабилизацию барометрической высоты полета;
выдерживание заданного компасного курса;
выполнение координированных разворотов;
набор высоты, снижение и выполнение спиралей;
автоматическое триммирование руля высоты с
помощью управляемого стабилизатора самолета.
В АП предусмотрен режим совмещенного управления,
обеспечивающий быстрый переход из режима автоматического управления в режим
штурвального управление самолётом с переводом АП в режим согласования. Схемное
решение и конструкция АП обеспечивают безопасность полета в случае
возникновения в нем неисправностей.
Включение АП не требует предварительной
настройки и может производиться на любом курсе и при любом крене, а по тангажу
- в зоне углов ±15°. При включении сохраняется текущий угол тангажа, а по крену
самолет выводится в горизонт.
В АП предусмотрена возможность отключения канала
тангажа.
2. Основные технические данные
Напряжения питания:
постоянного тока - 27 В;
переменного тока - 36 В 400 Гц.
Потребляемые токи:
постоянный - не более 3А;
переменный (в каждой фазе) - не более 4А.
Время готовности АП к включению - не более 100
сек.
Величина ошибки стабилизации в невозмущенной
атмосфере при постоянной скорости полета:
по курсу - ± 1°;
по тангажу - ± 0,5°;
по крену - ± 0,5°;
по высоте - ± 20 м.
Зона рабочих углов АП:
по курсу - не ограничена;
по крену - 30°;
по тангажу - 15°.
Скорость управления от рукоятки АП по тангажу:
малая скорость - 0,7 град/сек;
большая скорость - 1,9 град/сек.
Моменты, развиваемые рулевыми машинами:
по крену - 1,5 кгм;
по тангажу - 1,2 кгм;
по направлению - 1,5 кгм.
Величина усилий, необходимая для пересиливания
АП:
на штурвал - 11 кг;
на колонку - 12 кг;
на педали - 30 кг.
Минимальная высота использования АП - 300 м.
Вес АП - 24 кг.
3. Комплектность
В комплект АП "Кремень-40" входят (см.
рис. 1):
пульт управления ПУ - 1 шт.;
вычислитель крена ВК - 1 шт.;
вычислитель тангажа ВТ - 1 шт.;
рулевые машины:
·
крена
РД7А-К - 1 шт.
·
тангажа
РД7А-Т - 1 шт.
·
направления
РД7А-Н - 1 шт.
- корректор высоты КВ-11 - 1 шт.;
датчик обратной связи стабилизатора ДОС - 1 шт.;
пульт проверки автопилота ПП - 1 шт.;
реле ТКЕ-52 ПОДГ - 2 шт.;
кнопка отключения автопилота КН3 - 2 шт.;
кнопка "Совмещенное управление" КН3 -
2 шт.
Примечание.
Вместе с приборами АП поставляется
амортизированное основание для вычислителей, запчасти, инструмент и ответные
части штепсельных разъемов.
АП работает совместно с гировертикалью АГБ (или
АГД), гиромагнитным компасом ГМК-1Г, гидрокраном стабилизатора ГА-163/16, с
системой световой и звуковой сигнализации об отказах АП.
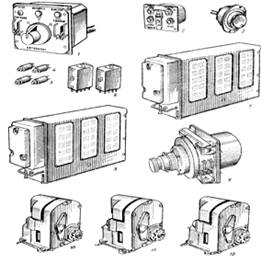
Рис. 1. Комплект автопилота:
- пульт управления;
- пульт проверки;
- ДОС стабилизатора;
- кнопки отключения АП;
- кнопки совмещенного управления;
- реле включения гидрокрана стабилизатора;
- вычислитель тангажа;
- корректор высоты;
- рулевые машины.
Для снятия в проводке РВ усилий, возникающих при
изменении балансировки самолета, служит система автоматического управления
поворотным стабилизатором.
Эта система измеряет установившееся напряжение
на обмотке управления двигателя рулевой машины (РВ) канала тангажа.
Наличие установившегося напряжения
свидетельствует о нагружении рулевой машины шарнирным моментом.
В этом случае автоматически дается команда на
отклонение стабилизатора в сторону разгрузки РВ.
Система контроля АП построена по принципу
непрерывного пропускания контрольного сигнала через тракт усиления сигнала
угла.
4. Блочная схема автопилота
Управление боковым движением самолета
осуществляется через каналы крена и направления, а продольным - через канал
тангажа. На рис. 2 представлена блочная схема АП.

Рис. 2. Блочная схема автопилота
Канал крена состоит из вычислителя крена (ВК) и
рулевой машины крена Д7А-К.
Канал направления состоит из вычислительной
части, конструктивно расположенной в вычислителе крена, и рулевой машины
направления РД7А-Н.
Канал тангажа состоит из вычислителя тангажа
(ВТ), рулевой машины тангажа РД7А-Т, корректора высоты КВ-11 и датчика обратной
связи (ДОС) стабилизатора.
В вычислителях АП сосредоточены усилительные
блоки сервопривода элементы, необходимые для преобразования, суммирования и
усиления управляющих сигналов, а также элементы, обеспечивающие переключение
режимов работы АП. Вычислители содержат элементы, непрерывно контролирующие
работу основных цепей канала и отключающие канал в случае неисправности с
сигнализацией летчику.
Рулевая машина (РМ) автопилота является
исполнительным органом сервопривода и представляет собой электромеханическое
устройство, служащее для управления рулевыми поверхностями самолета. Она
состоит из двигателя с редуктором, датчика позиционной обратной связи, датчика
скоростной обратной связи, муфты сцепления и муфты пересиливания. Выходной вал
рулевой машины механически связан с органами управления самолета.
Пульт управления (ПУ) автопилота представляет
собой электромеханическое устройство, имеющее комбинированную рукоятку
управления по крену и тангажу, выключатели и кнопки-лампочки, обеспечивающие
включение питания АП, переключение режимов его работы с сигнализацией летчику.
Пульт проверки (ПП) автопилота предназначен для
включения наземного контроля АП при предполетной подготовке.
Корректор высоты (КВ-11) представляет собой
электромеханическое устройство, выдающее электрический сигнал, пропорциональный
изменению барометрической высоты полета относительно стабилизируемой.
Датчик обратной связи (ДОС) стабилизатора
предназначен для выдачи электрического сигнала, пропорционального углу
отклонения стабилизатора самолета. Датчик механически связан со стабилизатором
и представляет собой индукционный бесконтактный потенциометр, помещенный в
корпус.
5. Структурные схемы автопилота и реализуемые
законы управления
.1 Продольный канал. Режим стабилизации угла
тангажа и управления по тангажу

Рис. 3. Структурная схема канала тангажа в
режиме стабилизации и управления
Реализуемый закон управления АП по каналу
тангажа в режиме стабилизации и управления:
 ,
,
где:  - постоянная времени изодромной
обратной связи;
- постоянная времени изодромной
обратной связи;
 - угол отклонения руля высоты;
- угол отклонения руля высоты;
 - передаточное число по углу
тангажа;
- передаточное число по углу
тангажа;
 - угол тангажа самолёта;
- угол тангажа самолёта;
 - коэффициент, зависящий от угла
отклонения рукоятки управления по тангажу;
- коэффициент, зависящий от угла
отклонения рукоятки управления по тангажу;
 - постоянная времени форсирующего
звена;
- постоянная времени форсирующего
звена;
 - передаточное число от
стабилизатора на руль высоты;
- передаточное число от
стабилизатора на руль высоты;
 - угол отклонения стабилизатора;
- угол отклонения стабилизатора;
 - коэффициент усиления привода
канала АП.
- коэффициент усиления привода
канала АП.
5.2 Продольный канал. Режим
стабилизации высоты

Рис. 4. Структурная схема канала
тангажа в режиме стабилизации высоты
Реализуемый закон управления по
каналу тангажа в режиме стабилизации высоты:
 ,
,
где:  - передаточная функция
- передаточная функция  при
при  ,
,  при
при  ;
;
 - передаточное число по сигналу
корректора высоты;
- передаточное число по сигналу
корректора высоты;
 - постоянные времени фильтра по
сигналу
- постоянные времени фильтра по
сигналу  ;
;
- отклонение от стабилизируемой
высоты.
.3 Боковой канал. Режим стабилизации
угла крена и курса

Рис. 5. Структурная схема каналов
крена и курса в режиме стабилизации
Реализуемый закон управления по
каналам крена и курса в режиме стабилизации:

где:  - постоянная времени изодромной
обратной связи;
- постоянная времени изодромной
обратной связи;
 - угол отклонения элеронов;
- угол отклонения элеронов;
 - передаточное число по углу крена;
- передаточное число по углу крена;
 - угол крена самолёта;
- угол крена самолёта;
 - передаточное число из канала
курса в канал крена;
- передаточное число из канала
курса в канал крена;
 - сигнал рассогласования по курсу;
- сигнал рассогласования по курсу;
 - постоянная времени форсирующего
звена;
- постоянная времени форсирующего
звена;
 - угол отклонения руля направления;
- угол отклонения руля направления;
 - передаточное число по угловой
скорости курса;
- передаточное число по угловой
скорости курса;
 - постоянная времени фильтра;
- постоянная времени фильтра;
 - угол курса;
- угол курса;
 - коэффициент перекрёстной связи из
канала крена в канал руля направления;
- коэффициент перекрёстной связи из
канала крена в канал руля направления;
 - сигнал рассогласования по крену;
- сигнал рассогласования по крену;
 - коэффициенты предварительного и
оконечного каскадов привода автопилота;
- коэффициенты предварительного и
оконечного каскадов привода автопилота;
 - коэффициент обратной связи.
- коэффициент обратной связи.
5.4 Боковой канал. Режим управления
по крену

Рис. 6. Структурная схема каналов
крена и курса в режиме управления
Реализуемый закон управления по
каналам крена и курса в режиме управления:

 - координата, характеризующая
положение рукоятки "РАЗВОРОТ";
- координата, характеризующая
положение рукоятки "РАЗВОРОТ";
 - передаточная функция, учитывающая
лишь некоторые особенности сервопривода канала курса.
- передаточная функция, учитывающая
лишь некоторые особенности сервопривода канала курса.
Одной из наиболее интересных особенностей АП
является то, что функция стабилизации самолёта по курсу передана каналу
элеронов за счёт наличия перекрёстной связи из канала курса в канал элеронов,
за каналом же РН оставлена практически лишь роль демпфера колебаний самолёта по
курсу. С целью повышения точности стабилизации углового положения самолёта в
каналах элеронов и РВ применены изодромные обратные связи, а канал РН имеет
жёсткую обратную связь.
В законе управления по каналу
тангажа последним слагаемым учитывается воздействие по положению поворотного
стабилизатора  . Данное
воздействие представляет воздействие по возмущению.
. Данное
воздействие представляет воздействие по возмущению.
Его введение способствует повышению
динамической точности стабилизации угла тангажа.
Законами управления по каналам
элеронов и РН предусматриваются перекрёстные воздействия по и соответственно.
При этом воздействие по в канале
элеронов обеспечивает создание крена в сторону выхода на заданный курс (ЗК), а
воздействие по в канале РН
способствует уменьшению скольжения  самолёта при появлении крена (см.
рис. 5).
самолёта при появлении крена (см.
рис. 5).
Сигналы по производным от сигналов , и АП
формируются путём дифференцирования сигналов по отклонению.
В режиме стабилизации высоты полёта
при отклонениях угла тангажа, превышающих по абсолютной величине  , в цепь
сигнала по тангажу вводится изодромное звено. В результате статическая ошибка
стабилизации высоты ограничивается величиной:
, в цепь
сигнала по тангажу вводится изодромное звено. В результате статическая ошибка
стабилизации высоты ограничивается величиной:  .
.
Звено с передаточной функцией  в цепи
сигнала по высоте
в цепи
сигнала по высоте  создаёт
опережение по фазе в некоторой рабочей области частот, в результате чего
повышается устойчивость системы в этом режиме полёта.
создаёт
опережение по фазе в некоторой рабочей области частот, в результате чего
повышается устойчивость системы в этом режиме полёта.
В АП предусмотрена возможность
уменьшения постоянной времени  изодрома в цепи сигнала при выпуске
шасси и закрылков, что повышает динамическую точность стабилизации высоты
полёта при заходе на посадку.
изодрома в цепи сигнала при выпуске
шасси и закрылков, что повышает динамическую точность стабилизации высоты
полёта при заходе на посадку.
В режиме управления сигнал с
рукоятки "СПУСК-ПОДЪЁМ" ПУ пропускается через интегрирующее звено  , в
результате чего реализуется принцип управления "по скорости".
Управление координированным разворотом осуществляется по положению рукоятки.
, в
результате чего реализуется принцип управления "по скорости".
Управление координированным разворотом осуществляется по положению рукоятки.
6. Режимы работы автопилота
В работе АП можно выделить следующие
основные режимы:
а) режим автоматической подготовки
АП к включению (режим согласования);
б) режимы включенного АП:
стабилизация курса, крена и тангажа;
стабилизация барометрической высоты
полета;
управление по крену и стабилизация
крена при развороте;
управление по тангажу;
совмещенное управление;
режим автоматического триммирования
руля высоты.
7. Особенности электрической схемы и
конструкции автопилота
Включение АП "Кремеиъ-40"
может производиться при любом крене самолета в зоне углов тангажа ±15°. После
включения самолет выводится в горизонтальное положение, после чего
автоматически включается стабилизация по курсу. Это объясняется следующими
схемными особенностями. В режиме согласования сигнал текущего крена не
обнуляется и отключен от сервопривода канала элеронов, сигнал же текущего курса
обнуляется механизмом согласования, включаемым в тракты сигналов элеронов и РН.
По окончании процесса согласования (сигнал на выходе механизма согласования при
этом не обязательно равен нулю, но должен быть достаточно малым) происходит
отпускание релейного усилителя, в результате чего подготавливается цепь реле,  и выдается
сигнализация на лампочку ГОТОВ. После включения АП, благодаря отклонению
элеронов, крен уменьшается до нуля, завершается обнуление сигнала курса и АП
переводится в режим стабилизации курса.
и выдается
сигнализация на лампочку ГОТОВ. После включения АП, благодаря отклонению
элеронов, крен уменьшается до нуля, завершается обнуление сигнала курса и АП
переводится в режим стабилизации курса.
В АП "Кремень-40"
предусмотрена схема автоматического "триммирования" РВ, работающая
аналогично соответствующей схеме автопилота АП-28Л1. Поскольку на самолете
Як-40 снятие шарнирного момента РВ производится путем перестановки
стабилизатора, что требует приложения большого усилия, специальная триммерная
машина в комплекте AП отсутствует, а сигнал, снимаемый со схемы автоматического
триммирования, поступает на электроклапаны гидравлической системы управления
стабилизатором.
Следующей особенностью схемы АП
"Кремеаь-40" является наличие встроенного автоматического контроля.
Контроль за работой АП в полете осуществляется путем подачи на выходы каналов
элеронов и РВ дополнительных сигналов, изменяющихся с частотой 13 Гц (в канале
элеронов) и 25 Гц (в канале руля высоты). На выходах каналов эти сигналы
выделяются специальными фильтрами. В случаях, когда произошел обрыв или
короткое замыкание трактов сигнала, пропало напряжение питания, на входе
усилителя сервопривода появился сигнал такой величины, что усилитель перешел в
режим насыщения, или возникла неисправность в самой системе контроля, входное
реле системы контроля с некоторой задержкой времени обесточивается, в
результате чего происходит отключение соответствующего канала с выдачей пилоту
световой (загораются табло "ОТКАЗ АП БОК." или "ОТКАЗ АП
ПРОД.") и звуковой сигнализации. При пропадании контрольного сигнала в
канале элеронов отключается канал РН.
Контроль работы канала РН АП
осуществляется по уровню напряжения на выходе усилителя сервопривода. Схема
контроля срабатывает, когда на выходе усилителя появляется длительный сигнал
определенной величины. Кроме того, если с РМ РВ длительное время (примерно 5 с)
не снимается управляющий сигнал, что свидетельствует о неисправной работе
автотриммера, подводится сигнал на световое табло "УСИЛИЕ. ОТКЛЮЧИ
АП".
Поскольку при пользовании рукоятками
управления АП схема встроенного контроля не должна срабатывать, в ней
предусмотрены логические устройства. Логическое устройство канала элеронов
отключает систему контроля в случае, когда элероны отклоняются в сторону
выполнения заданной команды. Логическое устройство в канале РВ уменьшает
величину сигнала, поступающего на РМ, до величины, соответствующей
действительной скорости вращения самолета. Такое уменьшение осуществляется
реверсированием сигнала, снимаемого о рукоятки, в моменты срабатывания первой
ступени контроля канала.
В АП "Крекень-40"
предусмотрена также специальная схема включения звуковой сигнализации, которая
срабатывает в таких случаях:
при отключении АП пилотом;
при отказах АП по продольному и
боковому каналу;
при отказе системы автотриммера.
Длительность импульса звуковой
сигнализации определяется характером отказа. В частности, длительность
импульса, выдаваемого АП при отключении его пилотом меньше, чем при отказах AП.
В пульте управления АП предусмотрен
тумблер "ТАНГАЖ", с помощью которого можно осуществить режим ручного
управления РВ при работающем боковом канале АП. При отключении тумблера
"ТАНГАЖ" в полете цепь звуковой сигнализации тангажа также
разрывается.
Интересной особенностью АП является
наличие в его комплекте кнопок "СОВМЕЩЕННОЕ УПРАВЛЕНИЕ" (на самолёте
эти кнопки расположены на штурвалах пилотов). При нажатии кнопки
"СОВМЕЩЕННОЕ УПРАВЛЕНИЕ" обесточиваются муфты сцепления РМ, и АП
переводится в режим согласования. Пилот при этом свободно управляет самолетом о
помощью колонки, штурвала и педалей. Для включения режима автоматической
стабилизации достаточно отпустить кнопку.
Еще одной особенностью схемы АП
является простота проведения предполетных и послеполетных проверок. С этой
целью в АП предусмотрен пульт проверки (ПП). Проверка работоспособности АП
производится при включенном тумблере "КОНТР. АП" последовательным
нажатием кнопок "КРЕН", "КУРС" и "ТАНГАЖ". При
этом в соответствующий канал АП подается тест-сигнал. Поскольку изодромные
обратные связи в каналах крена и тангажа при включении тумблера "КОНТР.
АП" переключаются на жесткие, о работоспособности АП можно судить по
отклонению органов управления самолетом. Четвертая кнопка
"KРEH-ТАНГАЖ" на ПП служит для проверки исправности системы
встроенного автоматического контроля. Такая проверка осуществляется при
выключенном тумблере "КОНТР. АП". При нажатии кнопки
"КРЕН-ТАНГАЖ" в цепи каналов элеронов и РВ вводятся
"неисправности" (разрыв или замыкание входной цепи соответственно), в
результате чего должен срабатывать автоматический контроль с выдачей пилоту
световой и звуковой сигнализации. При включении тумблера "КОНТР. АП"
система встроенного автоматического контроля отключается.
Основной особенностью конструкции АП
является наличие всего двух блоков вычислителей (вместо обычных трех),
оформленных в виде самостоятельных кассет, устанавливаемых на общей платформе.
При этом в вычислителе крена сосредоточены все усилительные, преобразующие,
коммутирующие и контролирующие элементы каналов элеронов и РН, в вычислителе
тангажа - все аналогичные элементы канала РВ. Отдельные элементы вычислителей
выполнены в виде обособленных модулей.
8. Контрольно-проверочная аппаратура
"Кремень-1"
Контрольно-проверочная аппаратура
"ПА-Кремень-1" предназначена для проверки и регулировки АП
"Кремень-40" после установки его на самолет, при замене АП или
отдельных агрегатов для проведения регламентных работ и отыскания
неисправностей АП на самолете Як-40.
.1 Контрольно-измерительный пульт
"ПА-Кремень-1"
Контрольно-измерительный пульт
"ПА-Кремень-1" предназначен для проверки, регулировки и отыскания
неисправностей АП на самолете.
Назначение элементов
контрольно-измерительного пульта "ПА-Кремень-1":
- штепсельные разъемы К и Т предназначены для
подключения пульта через одноименные жгуты к вычислителям крена и тангажа;
штепсельные разъемы Ф-К и Ф-Т - для подключения
пульта через одноименные жгуты к разъемам шасси вычислителей на самолете;
гнезда бокового и продольного каналов - для
подключения комбинированного прибора при количественной оценке сигналов АП;
тумблер B1 - для выключения сигналов по углу
крена в боковом канале;
тумблер В2 - для выключения сигналов по
стабилизации курса в боковом канале;
тумблер ВЗ - для выключения сигналов обратной
связи РМ крена;
тумблер В4 - для подключения имитатора системы
траекторного управления (СТУ) пульта или датчика СТУ к входу бокового канала
АП;
тумблер В5 - для выключения сигналов но углу
тангажа в продольном канале;
тумблер В6 - для выключения сигналов обратной
связи РМ тангажа в продольном канале;
переключатель В7 - для подключения имитатора СТУ
пульта или датчика СТУ к входу продольного канала АП.
.2 Пульт проверки РД-7 (6С2.702.091)
Пульт проверки РД-7 (6С2.702.091) предназначен
для проверки момента удержания фрикционной муфта РМ РД-7 (6С3.187.003).
Схема пульта обеспечивает подачу напряжения
питания па электромагнитную муфту, на обмотки возбуждения и управления РМ.
Назначение элементов:
штепсельный разъем Ш1 предназначен для
подсоединения через жгут питания источников питания к пульту;
штепсельный разъем ШРМ - для подсоединения РM к
пульту;
тумблер B1 - для включения напряжения питания;
переменные резисторы R1 и R2 - для регулирования
напряжения соответственно в цепях управления я возбуждения РМ;
вольтметры ИП1 и ИП2 - для количественной оценки
напряжения в цепях управления и возбуждения;
переключатель В2 - для изменения фазы напряжения
на 180° в цепи управления.
.3 Кронштейн для РД-7 (6С4.132.028)
Кронштейн предназначен для проверки момента
удержания муфт пересиливания РМ.
Расчёт моментов удержания (М) по показаниям
динамометров на момент удержания производится по формуле:
 ,
,
где  - показания динамометра, кг,
- показания динамометра, кг,
 - коэффициент передачи кронштейна.
- коэффициент передачи кронштейна.
9. Проверка работы автопилота
.1 Подготовка АП к проверке

Рис. 1. Внешний вид лабораторного стенда.
Установить ручки управления угловым положением
платформы поворотного стола авиагоризонта АГД-1 согласно нулевым показаниям
шкал. Ножками поворотного стола платформы выставить авиагоризонт по уровню в
окошке в нулевое положение.
Шестерни валов РМ установить в среднее
положение, совместив белые риски на шестернях с рисками на корпусах РМ (в
дальнейшем при проведении всевозможных проверок контролировать их положение).
На ПУ рукоятка координированного разворота
должна быть установлена в среднее положение, тумблеры "ПИТАНИЕ" и
"ТАНГАЖ" в положении "ОТКЛ.".
На пульте 6С2.702.145 установить тумблеры в
следующие положения:
·
В1
"УГОЛ КРЕНА" - "ВКЛ.";
·
В2
"СТАБ. КУРСА" - "ВКЛ.";
·
В3
"ОБР. СВ. К." - "ВКЛ";
·
В4
"СТУ. К" - "ОТКЛ.";
·
B5
"УГОЛ ТАНГАЖА" - "ВКЛ";
·
В6
"ОБР. СВ. Т." - "ВКЛ";
·
В7
"СТУ. Т." -"ДАТЧ."
На пульте 6С2.702.145 поставить перемычки между
контрольными гнездами:
·
бокового
канала - 2-2', 30-30', 43-43';
·
продольного
канала - 3О-3О'.
Включить тумблеры питание стенда 36 В 400 Гц и
±27 В. Точнее выставить гировертикаль по крену, для чего поворотом ножек стола
добиться, чтобы показания вольтметра переменного тока, подключенного к
контрольным гнездам 25 и 49 бокового канала пульта 6С2.702. 145, не превышали
0,25 В.
Включить тумблеры "ПИТАНИЕ" и
"ТАНГАЖ" на ПУ и тумблер на пульте проверки АП. (На ПУ должна
загореться лампочка ГОТОВ). Замерить напряжение переменного тока на контрольных
гнездах 15 и I8, 15 и 28, 18 и 28 пульта 6С2.702.145 в боковом и продольном
каналах которое должно соответствовать 36 В 400 Гц.
.2 Проверка правильности установки ДОС
стабилизатора
Подключить вольтметр переменного тока (предел
измерения 60 В) к контрольным гнездам 19 и 37 продольного канала пульта
6С2.702.I45. Вращением подвижной части ДОС стабилизатора установить напряжение
на вольтметре, которое должно быть не более 0,5 В. Для более точного измерения
устанавливаемого напряжения следует изменить предел измерения вольтметра - 3 В.
9.3 Проверка правильности установки валов
рулевых машин крена, тангажа, направления и центровки канала крена
(теоретическое ознакомление)
На ПУ нажать кнопку-лампочку
"ВКЛЮЧЕН". Она должна загореться, а лампочка "ГОТОВ"
погаснуть. Снять крышки, закрывающие доступ к передним панелям с
регулировочными потенциометрами вычислителей АП.
Поочередно подсоединяя вольтметр постоянного
тока к контрольным гнездам ДОС К, ДОС Н вычислителя крена и ДОС вычислителя
тангажа замерить напряжения на клеймах соответствующих каналов которые должны
быть не более 0,5 В. Если напряжение будет больше указанного, то необходимо с
помощью ручек поворотной платформы гировертикали установить по вольтметру
минимально возможное напряжение не более 0,5 В.
Отключить тумблер на пульте проверки и тумблеры
В2 и ВЗ на пульте 6С2.702.145. Если РМ начнут вращаться, то с помощью
потенциометра R20 на лицевой панели вычислителя крена добиться прекращения
движения РМ.
После окончания проверок включить тумблеры В2 и
ВЗ на пульте, отсоединить вольтметр и нажать кнопку "ОТКЛ. АП".
.4 Проверка работы механизма согласования
тангажа
При нейтральных положениях органов управления на
ПУ резко отклонить гировертикаль по тангажу на 5-10° в пределах угла ±14° и
наблюдать за лампочкой "ГОТОВ" которая должна погаснуть на короткое
время. Проверить, погасла ли лампочка "ГОТОВ" при отклонении
гировертикали на угол 14-51°. Нажать кнопку-лампочку "ВКЛОЧЕН"
которая не должна загореться. Вернуть гировертикаль в нулевое положение.
Лампочка ГОТОВ должна загореться.
Повернуть гировертикаль по тангажу на угол 10° и
через 3-5 сек. включить АП. РМ тангажа должна остаться неподвижной. Нажать
кнопку "ОТКЛ. АП".
Вернуть гировертикаль в исходное положение.
Лампочка "ГОТОВ" должна загореться.
.5 Проверка работы кнопок "ВКЛЮЧЕН",
"ОТКЛ. АП", "ВЫСОТА" и "СОВМЕЩЕННОЕ УПРАВЛЕНИЕ"
Установить шестерни валов РМ крена, курса и
тангажа в нейтральное положение (совместить белые риски на шестернях валов с
рисками на корпусах РМ).
Включить тумблер "ТАНГАЖ" и нажать
кнопку-лампочку "ВКЛЮЧЕН". Она должна загореться, а лампочка
"ГОТОВ" погаснуть.
На ПУ нажать кнопку-лампочку "ВЫСОТА",
она должна загореться. Отклонить и быстро отпустить рукоятку управления ПУ на
пикирование (вниз), при этом кнопка-лампочка "ВЫСОТА" должна
погаснуть.
Нажать кнопку-лампочку "ВЫСОТА", она
должна загореться. Отклонить и быстро отпустить рукоятку ПУ на кабрирование
(вниз), при этом кнопка-лампочка "ВЫСОТА" должна погаснуть.
Нажать кнопку-лампочку "ВЫСОТА", она
должна загореться.
Нажать кнопку "ОТКЛ. АП".
Кнопки-лампочки "ВКЛЮЧЕН" и "ВЫСОТА" должны погаснуть, а
лампочка "ГОТОВ" - загореться.
Нажать кнопки-лампочки "ВКЛЮЧЕН" и
"ВЫСОТА", они должны загореться. Нажать и удерживать кнопку
"СОВМЕЩЕННОЕ УПРАВЛЕНИЕ". Кнопки-лампочки "ВКЛЮЧЕН" и
"ВЫСОТА" должны погаснуть, в лампочка "ГОТОВ" загореться.
Удерживая кнопку "СОВМЕЩЕННОЕ
УПРАВЛЕНИЕ", поочерёдно медленно поворачивать шестерни РМ крена и тангажа
на четверть оборота влево и вправо имитируя штурвальное управление (при этом
лампочка "ГОТОВ" может кратковременно гаснуть) и через 3-5 сек. отпустить
кнопку.
Лампочка "ГОТОВ" должна погаснуть,
кнопка-лампочка "ВКЛЮЧЕН" загореться, а шестерни валов РМ крена и
тангажа вернуться в исходное положение.
.6 Проверка действия выключателей "ТАНГАЖ и
"ПИТАНИЕ" на ПУ
Нажать кнопку-лампочку "ВЫСОТА", она должна
загореться. Заметить положение шестерни вала РМ тангажа. На ПУ отключать
выключатель "ТАНГАЖ". Кнопка-лампочка "ВЫСОТА" должна
погаснуть, а шестерня вала РМ тангажа свободно вращаться. Отклонить в любую
стоpoну шестерню вала РМ тангажа на четверть оборота. Отклонить гировертикаль
по тангажу на угол 5° в любую стоpoну. Через 3-5 сек. включить на ПУ тумблер
"ТАНГАЖ", при этом шестерня вала РМ должна оставаться неподвижной.
Отклоняя гировертикаль по тангажу, убедиться, что РМ соответственно отклоняется.
На ПУ отключить тумблер "ПИТАНИЕ". Вернуть гировертикаль в нулевое
положение. Включить тумблер "ПИТАНИЕ". Лампочка "ГОТОВ"
должна загореться.
.7 Проверка работы пульта проверки автопилота
Проверка работы ПП АП производится как при
включённом так и при выключенном положении тумблера ПП. При включённом
положении тумблера ПП изодромные обратные связи каналов крена и тангажа
переключаются на жёсткие, что обеспечивает проведение предполётного тест
контроля сервоприводов АП. При выключенном положении тумблера ПП производится
предполётная проверка системы автоматического контроля работы АП.
Включить тумблер на ПП АП. Включить АП в режим
стабилизации нажатием кнопки-лампочки "ВКЛЮЧЕН". Она должна
загореться, а лампочка "ГОТОВ" погаснуть.
На ПП нажать и удерживать кнопку
"КРЕН", при этом шестерни валов РМ крена и тангажа должны
провернуться на определённый угол. Отпустить кнопку "КРЕН", шестерни
валов РМ крена и тангажа должны вернуться в исходное положение.
На ПП нажать и удерживать кнопку
"ТАНГАЖ", шестерня вала РМ тангажа должна повернуться на некоторый
угол. Отпустить кнопку "ТАНГАЖ", шестерня вала РМ тангажа должна
вернуться в исходное положение.
На ПП нажать и удерживать кнопку
"КУРС", шестерня вала РМ крена должна повернуться на некоторый угол,
а шестерня вала РМ курса отклониться и сразу же вернуться в походное положение.
На ПП нажать и удерживать 2-3 сек. кнопку
"КРЕН-ТАНГАЖ". На стенде лампочки "ОТКАЗ АП БОК" и
"ОТКАЗ АП ПРОД." не должны загораться.
Отключить тумблер на ПП. Нажать и удерживать 2-3
сек. кнопку "КРЕН-ТАНГАЖ", при этом на ПУ лампочка
"ВКЛЮЧЕН" должна погаснуть, а лампочки "ОТКАЗ АП БОК." и
"ОТКАЗ АП ПРОД." на стенде должны загореться.
Нажать кнопку "ОТКЛ. АП.", и отключить
на ПУ тумблеры "ТАНГАЖ" и "ПИТАНИЕ".
Выключить питание лабораторного стенда поставив
тумблеры "36 В 400 Гц" и "±27 В" в нижнее положение.
.8 Определение момента удержания рулевой машины
РД7
Проверку определения момента удержания муфты
пересиливания РМ допускается выполнять отдельно от проверки АП, при этом
питание стенда АП может быть отключено.
Рулевая машина РД7 установлена на кронштейне
6C4.132.028 и работает совместно с блоком 6С2.702.091 обеспечивающим управление
вращением проверяемой РМ.
На блоке 6С2.702.091 потенциометры R1
(управление) и R2 (возбуждение) установить в крайнее левое положение. Тумблер
В2 поставить в положение "ПО ЧАС. СТР." задавая тем самым направление
вращения вала проверяемой РМ по часовой стрелке. При этом измерения производить
по правому динамометру.
Тумблер В1 поставить в положение
"ВКЛ.". Потенциометром R2 (возбуждение) по вольтметру ИП2 установить
напряжение на обмотке возбуждения двигателя РМ равное 36 В. Потенциометром R1
(управление) по вольтметру ИП1 плавно установить напряжение на обмотке
управления двигателя РМ равное 40 В. С помощью показаний правого динамометра,
находящегося на кронштейне 6С4.132.028 вычислить момент удержания муфты
пересиливания.
ПРИМЕЧАНИЕ: Дня вычисления момента удержания
муфты пересиливания необходимо показания динамометра умножить на длину плеча,
равное 0,11 м. При замерах фиксировать значение момента удержания в процессе
проскальзывания муфты. Допускается колебание величины момента удержания в
пределах ±0,2 кгм. В этом случае за фактическую величину момента следует
принимать среднее значение показаний динамометра. Время работы в режиме
проскальзывания муфты РМ не должно превышать 4-5 сек., а повторение этого
режима допускается не ранее, чем через 1 минуту.
На блоке 6С2.702.091 потенциометры R1
(управление) и R2 (возбуждение) установить в крайнее левое положение. Тумблер
В2 установить в положение "ПР. ЧАС. СТР.". Потенциометром R2
(возбуждение) по вольтметру ИП2 установить напряжение на обмотке возбуждения
двигателя РМ равное 36 В. Потенциометром R1 (управление) по вольтметру ИП1
плавно установить напряжение на обмотке управления двигателя РМ равное 40 В. С
помощью показаний левого динамометра, находящегося на кронштейне 6С4.132.028
вычислить момент удержания муфты пересиливания.
Повторить проверку 3-5 раз в каждую сторону.
Моменты удержания муфт пересиливания РМ: для
РД7А-К 1,25 - 1,85 кгм;
для РД7А-Т 1,00 - 1,48 кгм;
для РД7А-Н 1,25 - l,85 кгм.
Если момент удержания не соответствует указанным
величинам, но находится в пределах 1,05 - 2,1б кгм для PД7A-K, РД7А-Н и в
пределах 0,8-1,6 кгм для РД7А-Т, то муфты пересиливания РМ необходимо
регулировать.
По окончании проверки блоке 6С2.702.091
потенциометры R1 (управление) и R2 (возбуждение) установить в крайнее левое
положение, тумблер В1 поставить в положение "ОТКЛ.".
.9 Отключение автопилота
Для отключения питания AП тумблер
"ПИТАНИЕ" на ПУ АП поставить в положение "ОТКЛ.", при этом
лампочка "ГОТОВ" не ПУ погаснет. Выключить питание лабораторного
стенда поставив тумблеры "36 В 400 Гц" и "±27 В" в нижнее
положение.
Литература
1. Ямпурин
Н.П.: Электроника. - М.: Академия, 2011
. Воронков
Э.Н.: Твердотельная электроника. - М.: Академия, 2010
. Гуртов
В.А.: Зарядоперенос в структурах с диэлектрическими слоями. - Петрозаводск:
ПетрГУ, 2010
. Институт
СВЧ полупроводниковой электроники РАН: Наногетероструктуры в
сверхвысокочастотной полупроводниковой электронике. - М.: Техносфера, 2010
. Прянишников
В.А.: Электроника. - СПб.: КОРОНА-Век, 2010
. С.П.
Вихров, О.А. Изумрудов: Твердотельная электроника. - М.: Академия, 2010
. Ямпурин
Н.П.: Основы надежности электронных средств. - М.: Академия, 2010
. Под
ред. А.А. Орликовского; Рец.: А.Ф. Александров, А.А. Горбацевич:
Наноэлектроника. - М.: МГТУ им. Н.Э. Баумана, 2009
. Под
ред.: А.А. Кураева, Д.И. Трубецкого; А.В. Аксенчик и др.: Методы нелинейной
динамики и теории хаоса в задачах электроники сверхвысоких частот. - М.:
ФИЗМАТЛИТ, 2009
. Шишкин
Г.Г.: Электроника. - М.: Дрофа, 2009
. А.Н.
Диденко и др.; Под ред. И.Б. Фёдорова: Вакуумная электроника. - М.: МГТУ им.
Н.Э. Баумана, 2008
. Лебедев
А.И.: Физика полупроводниковых приборов. - М.: Физматлит, 2008
. Шматько
А.А.: Электронно-волновые системы миллиметрвого диапазона. - Харьков: ХНУ им.
В.Н. Каразина, 2008
. Московский
гос. ин-т стали и сплавов, Саратовский гос. ун-т им. Н.Г. Чернышевского; под
ред. Л.В. Кожитова: Оборудование, технологии и аналитические системы для
материаловедения, микро- и наноэлектроники. - М.: МИСиС, 2007
. Федеральное
агентство по образованию, Московский гос. ин-т стали и сплавов (Технологический
ун-т), Саратовский гос. ун-т им. Н.Г. Чернышевского; под ред. Л.В. Кожитова;
авт-сост.: В.П. Менушенков и др.: Оборудование, технологии и аналитические
системы для материаловедения, микро- и наноэлектроники. - М.: МИСиС, 2007