Автоматизация технологического процесса абсорбционной очистки природного газа на 1У372
Введение
Системы автоматизированного управления стали
неотъемлемой частью
технического
оснащения современного производства, обеспечивая повышение качества продукции и
улучшения экономических показателей производства за счет выбора и поддержания
оптимальных технологических режимов.
Оренбургский газоперерабатывающий завод является
предприятием с высокой степенью автоматизации технологических процессов.
Большинство его объектов и технологических установок оснащено системами
автоматического управления и регулирования, телемеханическими системами и иными
средствами автоматики.
Для достижения целей повышения качества и
конкурентоспособности выпускаемой продукции, улучшения условий управления
технологическими процессами, снижения непроизводительных потерь материально-технических
и топливно-энергетических ресурсов, повышения уровня безопасности производства
на Оренбургском газоперерабатывающем заводе в настоящее время реализуется
комплекс мероприятий по реконструкции и техническому перевооружению
автоматизированных систем управления с применением новейшего
контрольно-измерительного и аналитического оборудования, микропроцессорных
контроллеров, промышленных компьютеров и передового программного обеспечения.
Однако полное переоборудование распределённой системы управления на базе
современных законченных решений оказывается крайне дорогим и трудоёмким
мероприятием. Поэтому подход, базирующийся на замене отдельных устаревших
модулей системы современными компонентами, имеющими открытую архитектуру и
легко программируемыми, является наиболее оправданным и весьма актуальным.
Автоматизация технологических процессов на
газоперерабатывающем заводе главным образом осуществляется на базе
программно-технического комплекса Foxboro (Invensys). В процессе эксплуатации
данный программно-технический комплекс подтвердил все свои достоинства,
удовлетворяющие широкому диапазону требований пользователя, в том числе
специфическим обуславливаемым необходимостью контроля и регламентации
физико-химических свойств веществ и условиями проведения химико-технологических
процессов: высокими давлениями и температурами, агрессивностью перерабатываемых
сред, необходимостью обеспечения безопасности при любых, в частности
потенциально опасных, процессах.
Именно поэтому в качестве основы для реализации
цели дипломного проекта - автоматизация технологического процесса абсорбционной
очистки природного газа на 1У372 выбрана система «I/A Series» фирмы Foxboro
(Invensys). Система «I/A Series» является современной промышленной системой,
работающей под управлением операционных систем Windows XP/NT или Unix.
Масштабируемость системы дает возможность последовательного наращивания и
модернизации АСУ ТП небольшими частями, без остановки технологического процесса
и отключения системы.
Автоматизация 1У372 предусматривает введение
дополнительного контура регулирования с использованием новейших промышленных
газоанализаторов, которые позволяют решить важнейшую на газоперерабатывающем
заводе проблему снижения энергетических затрат (потребление пара) на
регенерацию аминового сорбента.
1. Обоснование необходимости разработки АСУ ТП
У-372
.1 Общая характеристика производственного
процесса
Процесс очистки и осушки сырого газа
поступающего на III очередь Оренбургского ГПЗ реализован на трех идентичных
установках 1,2,3У370 проектной производительностью на номинальном режиме работы
установки 5 млрд. нм3/ год каждая.
Технологическая схема и аппаратное оформление
этих установок одинаковое.
В состав каждой установки входит:
блок смешения и сепарации сырого газа -У371;
блок очистки газа от сероводорода, углекислого
газа и регенерации раствора этаноламинов -У372;
блок осушки, отбензиневания и очистки газа от
меркаптанов, регенерации гликоля и абсорбента -У374;
блок подсобных средств - У379.
Проект на строительство установок выполнен генеральным
проектировщиком - Государственным научно-исследовательским и проектным
институтом «ЮжНИИГипрогаз».
По проекту расчетный фонд рабочего времени
составляет 8000 часов в год. Все технологические процессы производства
непрерывны и автоматизированы.
Объекты основного производственного назначения
построены на базе комплексного импортного оборудования, поставленного
французской фирмой «ТЕКНИП».
Материальный баланс процесса очистки и осушки
сырого газа реализуемый на 1,2,3У-370 представлен в таблице 1.1.
Установки сероочистки и осушки сырого газа III
очереди Оренбургского ГПЗ введены в эксплуатацию 30 сентября 1978 года.
В предложенном дипломном проекте рассматривается
блок очистки природного газа от сероводорода, углекислого газа и регенерации
раствора этаноламинов 1У372.
Назначение блока - очистка сырого газа от
примесей Н2S, СО2 и COS. Извлечение кислых компонентов производится промывкой
газа циркулирующим 20-50 % водным раствором диэтаноламина (ДЭА) или 20-50%
водным раствором метилдиэтаноламина (МДЭА) или их смесью суммарной
концентрацией 20-50 % или абсорбентом «Новамин» с последующей регенерацией.
Таблица 1.1 - Материальный баланс установок
1,2,3У-370 (факт 1996 г)
|
П
Р И Х О Д
|
Р
А С Х О Д
|
|
Наименование
статей
|
Единица.
измерени
|
Количество
|
Наименование
статей
|
Единица.
измерения.
|
Количество
|
|
|
2
|
3
|
4
|
5
|
6
|
7
|
|
|
Сырой
газ
|
млн.м3
|
10220,68
|
Отбензиненный
сухой газ
|
млн.м3
|
9417.7
|
|
|
Газ
регенерации
|
млн.м3
|
1149.5
|
Кислый
газ
|
млн.м3
|
1075.64
|
|
|
|
|
СПБТ
|
млн.м3
|
794.12
(419.3тыс.тн)
|
|
|
ИТОГО
ПРИХОД
|
|
11370,18
|
Топливный
газ
|
млн.м3
|
14.5
|
|
|
|
|
Потери
|
|
68.22
|
|
|
|
|
ИТОГО
РАСХОД
|
|
11370.18
|
|
.2 Описание технологического процесса
Химизм процесса абсорбционной очистки сырого
газа от примесей Н2S, СО2
В основу процесса заложена способность
физического компонента абсорбента (в данном процессе ДЭА, МДЭА) извлекать
сероорганические примеси за счет физической растворимости и образования не
стойких химических комплексов.
В абсорбере протекают следующие реакции:
Для ДЭА - R2 NH где R - C2H4OH
R2 NH + H2S Û
(R2NH2)2 S (мгновенная)
(R2NH2)2S + H2S Û
2RNH2HS (мгновенная)
R2NH + CO2 Û
R2NCOOR2NH2 (быстрая)
СO2 + H2O Û
H2CO3 (медленная)
R2NH + H2CO3 Û
(R2NH2)2CO3 (быстрая)
(R2NH2)2C03 + H2CO3 Û
2R2NH2HCO3 (быстрая)
Для МДЭА
R2CH3N
R2CH3N + H2S Û
(R2CH3NH)2S (мгновенная)
(R2CH3NH)2S + H2S Û
2R2CH3NHHS (мгновенная)
R2CH3N + CO2 Û (прямой реакции
нет)
CO2 + H2O Û
H2CO3 (медленная)
R2CH3N + H2CO3 Û
(R2CH3NH)3CO3 (быстрая)
(R2CH3NH)2CO3 + H2CO3 Û
2R2CH3NHHCO3 (быстрая)
Данные реакции поглощения обратимые,
экзотермические и чувствительные к колебаниям температуры и давления. Реакции
поглощения протекают с выделением тепла, обратимая реакция сопровождается
поглощением тепла. Поглощение кислых компонентов повышается с увеличением
давления и снижения температуры, нижний предел температуры абсорбции ограничивается
вязкостью аминов. Абсорберы работают при повышенном давлении и пониженной
температуре, а регенераторы - при низком давлении и повышенной температуре.
Из приведенных уравнений видно, что ДЭА, МДЭА
реагируют с Н2S одинаковым образом с образованием сульфида и гидросульфида
амина, причем реакция классифицируется, как мгновенная; СО2 могут реагировать с
ДЭА с образованием карбоната диэтаноламмония R2NHCOOR2NH2, а также карбоната
(R2NH2)2CO3 и бикарбоната R2NH2HCO3. Обе реакции классифицируются как быстрые,
но образованию карбоната и бикарбоната предшествует медленная реакция
растворения СО2 в воде образованием угольной кислоты H2CO3.
Из структурной формулы
ДЭА ОН- СН2-СН2 - N -CH2 - CH2 - OH
ç
H
МДЭА OH -
CH2- CH2 - N - CH2 - CH2 - OH
ç
CH3
видно, что у МДЭА отсутствует свободный водород
в аминовой группе, поэтому прямая реакция СО2 с образованием карбоната не
протекает, а взаимодействие протекает через медленную стадию образования
угольной кислоты, конечными продуктами является карбонат бикарбонат. Скорость
реакции СО2 с МДЭА примерно на два порядка меньше, чем с ДЭА.
В связи с этим, при использовании МДЭА можно
достичь определенной избирательности извлечения Н2S в присутствии СО2 , что
позволяет в условиях переработки газа КГКМ получить кислые газы с соединениями
Н2S >50 % при меньшем их объеме. (При ДЭА очистке содержание Н2S@40
%). Сероокись углерода (COS) извлекается из газа после предварительного
разрушения его гидролизом:
СOS + H2O Û CO2 + H2S
Эта реакция идет при температурах более высоких,
чем абсорбция. Для обеспечения условий разрушения сероокиси углерода
предусмотрено повышение температуры в средней части абсорбера до -(750¸90)
0С.
Согласно признаку Ле-Шателье повышение
температуры и понижение давления сдвигают вышеприведенные реакции влево - этим
обусловлен выбор и реакции регенерации насыщенного амина.
.2 Описание технологической схемы
Очистка производится двумя параллельными
потоками на трех установках. Для удобства дано описание одной полулинии.
Процесс очистки осуществляется непрерывно в
абсорбере колонного типа, оснащенном двадцатью пятью ситчатыми тарелками.
Приходящий с блока сепарации неочищенный
сырьевой газ после подогрева в теплообменнике 372 Е01 до температуры не менее +20
0С за счет тепла регенерированного амина подается на очистку в нижнюю часть
абсорбера 372С01.
В абсорбере газ, проходя снизу вверх,
контактирует с встречным потоком раствора амина, освобождается от кислых
компонентов и выводится на блок осушки У-374.
Амин в абсорбер 372 С01 подается в две точки:
на 15 тарелку с температурой -(75 ¸90)
0С
на 25 тарелку с температурой -(35 ¸
50) 0С.
Регенерированный амин подается из емкости
хранения амина 372Т01 подпорными насосами 372Р01А,В,С на охлаждение в
аэрохолодильники 372А02, где охлаждается до температуры -(75¸90)
0С и поступает на прием насосов высокого давления 372Р02 А,С. Дополнительное
охлаждение осуществляется в аэрохолодильниках 372А04,А05, установленных
параллельно 372А02 и водяном холодильнике 372Е08А,В, установленном на выходе с
372А04,А05.
С нагнетания насосов 372P02А,С часть амина с
температурой -(75¸90) 0С и расходом до 260м3/ час
подается на 15 тарелку абсорбера.
Другая часть охлаждается в аэрохолодильниках
372А03, в теплообменнике 372Е01 с температурой до 50 0С и расходом до 240 м3/
час подается на 25 тарелку.
Для предотвращения возможного вспенивания
раствора амина предусмотрена подача антивспенивателя. Из бака 372В05 раствор
подается дозирующим насосом 372Р04 на прием насосов 372Р01А,В,С, в случае
интенсивного вспенивания предусмотрена увеличенная подача антивспенивателя
центробежным насосом 372Р05 на прием насосов 372Р02А,С.
Стекая по тарелкам амин насыщается Н2S и СО2
собирается в кубе колонны и выводится в емкость расширения 372 В01. Емкость
расширения (экспанзер) 372В01 работает под давлением 7 ати и служит для
частичной дегазации насыщенного раствора амина.
Предусмотрена линия сброса газов расширения из
372В01 на факел низкого давления при пуске установки или повышенном давлении.
На случай повышения давления в результате проскока газа из абсорберов емкость
дегазации защищена разрывной мембраной RD02, рассчитанной на 20 ати со сбросом
газа на факел ВД.
Газы расширения, состоящие из легких
углеводородов и кислых газов, проходят колонну 372С05, очищаются амином от
кислых компонентов и выводятся в топливную сеть завода. Колонна 372С05 оснащена
10 клапанными тарелками и расположена на емкости расширения 372В01. Амин
подается на 10 тарелку после теплообменника 372Е01 с температурой до 500С.
Регенерация амина от Н2S и СО2 производится в
отпарной колонне 372С03. Колонна оснащена 33 клапанными тарелками.
Дегазированный от углеводородов амин из емкости
372В01 двумя потоками поступает в теплообменники 372Е02А,В,С, подогревается до
110 0С за счет тепла регенерированного амина и подается на 20 тарелку десорбера
372С03.
Часть богатого амина (около 10 % ) может
подаваться по схеме с «холодным байпасом» минуя теплообменники 372Е02А,В,С на
22 тарелку десорбера, что при нормальной работе теплообменников позволяет
снизить расход тепла подводимого в рибойлера.
Насыщенный амин, поступающий в десорбер 372C03
стекает по тарелкам где из него выделяется сероводород и СО2 за счет тепло- и
массообмена с восходящим паровым потоком.
Окончательная регенерация амина осуществляется в
выносных подогревателях типа рибойлер 372Е04А1,А2. Амин со второй полуглухой
тарелки десорберов сливается в межтрубное пространство рибойлеров 372Е04А1,А2,
подогревается паром низкого давления до -(120-128) 0С и через перегородку
поступает в кубовую часть десорберов.
Паровая фаза из рибойлера подается под вторую
тарелку десорбера. Каждый рибойлер оснащен впрыскным конденсатоотборником.
Паровой поток, состоящий в основном из кислого
газа и паров воды, проходит тарелки отпарной части десорбера, промывную 22
тарелку, полуглухую 23 тарелку и поступает в верхнюю часть десорбера,
оснащенную десятью тарелками. Назначение верхней части - укрепление концентрации
кислого газа за счет его охлаждения и конденсации основного количества водяных
паров.
Охлаждение производится холодной циркуляционной
водой при непосредственном контакте на тарелках. Из верхней части десорбера
охлажденный до Т=(45-65) 0С кислый газ с незначительным содержанием паров воды
потоком поступает в заводской коллектор.
Кислая вода собирается на полуглухой тарелке №
23 и самотеком сливается в емкость 372В02. Из емкости 372В02 кислая вода
поступает на прием насосов 372Р03АВ. С нагнетания насосов 372P03А,В, часть воды
подается на промывочную 22 тарелку десорбера.
Другая часть воды в количестве до 250 т/час на
полулинию охлаждается в аэрохолодильниках 372А01 и подается на 33 тарелку
десорбера для охлаждения кислого газа. Унос воды в виде паров с кислым газом
восполняется подпиткой паровым конденсатом.
Регенерированный амин из кубовой части десорбера
после охлаждения в теплообменниках 372Е02А,В,С насыщенным амином до температуры
+90 0С поступает в емкость хранения 372T01.
.3 Описание действующей системы автоматики
На входной линии сырого газа в теплообменник
372Е01 установлен отсекатель 372RSV01.
При снижении температуры сырого газа,
поступающего в абсорбер 372С01, до 20 0С срабатывает сигнализация поз. 372TAL
07.
Температура по полулинии после теплообменника
372Е01 регистрируется прибором поз.372TR-07.
Расход газа по полулинии регистрируется прибором
поз. 372FR20.
На линии вывода кислых компонентов из абсорбера
372С01 на блок осушки У-374 установлен отсекатель 372RSV03.
Давление очищенного газа по полулинии (до 60
кг/см2) регулируется прибором 372PRC02, который управляет клапаном сброса на
факел высокого давления 372 PCV02.
В емкости хранения амина 372Т01 предусмотрена
сигнализация низкого уровня поз. 372LAL 26 (29%).
Давление на нагнетании насосов 372Р02А,С
контролируется приборами поз.372PI 28,10. При снижении давления на всасе
насосов 372P02А,С до 3.5 кгс/см2 срабатывает блокировка низкого давления
372PALCо07. На насосе 372Р02С при срабатывании блокировки 372PAHS10 (60
кгс/см2) открывается отсекатель ROV13.
При снижение давления на нагнетании насосов
372Р01А,В,С до 5кгс/см2 срабатывает блокировка поз.372PALS16.
Контроль общей температуры амина после 372А02
производится прибором поз. 372ТI-116.
Расход амина поступающего с температурой (75¸90)
0С на 15 тарелку абсорбера 372С01 регулируется и регистрируется прибором поз.
372FRC01, клапан, которого 372FCV01 установлены на линии подачи амина.
Расход амина поступающего с температурой до 50
0С на 25 тарелку абсорбера регулируется и регистрируется прибором поз.
372FRC03. Исполнительный механизм - регулирующий клапан 372FCV03 расположен на
линии подачи амина.
При низком расходе амина (менее 150 м3/час) в
абсорбер 372С01 срабатывает сигнализация 372FAL05, а при расходе менее 100
м3/час, срабатывает блокировка 372FALCo05 при которой происходит остановка
насоса 372 Р02А и закрытие:
RSV05 на выходе амина из куба абсорберов;
RSV01 на входной линии сырого газа;
RSV03 на линии вывода кислых компонентов из
абсорбера 372С01;
RОV07 на линии подачи амина в колонну 372С05 .
Температура амина на 25 тарелку абсорбера 372С01
контролируется термометром сопротивления поз. 372ТI-112. Температура амина
после 372А03 контролируется прибором поз.372TI-130.
Температура по высоте абсорбера 372 С01
контролируется приборами поз. 372TI-110,108. Температура насыщенного амина из
абсорберов контролируется приборами поз.372TI-104.
Перепад давления по колонне 372С01
контролируется прибором поз.372PdR11. При высоком перепаде (0.28кгс/см2)
срабатывает сигнализация поз.372PdAH11.
Регулирование уровня в абсорбере осуществляется
прибором поз. 372LRC-01, который управляет клапаном поз. 372LCV-01A.
Во избежание проскока газа при крайне низком
уровне абсорбер 372С01, оснащен:
блокировкой низкого уровня 372LALCO-04 (15%)
обеспечивающей остановку насоса 372 Р02А и закрытие отсекателей:
RSV05 на выходе амина из куба абсорберов;
RSV01 на входной линии сырого газа;
RSV03 на линии вывода кислых компонентов из
абсорбера 372С01.
специальным поплавковым клапаном в кубе
абсорбера, который закрывает выход амина при низком уровне.
При повышении уровня в абсорбере 372С011 до 97 %
срабатывает сигнализация поз.372LAH06, при снижении уровня до 35 % поз.372LAL
08.
Регулирование расхода амина для очистки газов
расширения в колонне 372С05 осуществляется прибором поз. 372FIC07, управляемым
клапаном 372 FCV07.
Давление в колонне 372С05 и емкости дегазации
372В01 поддерживается прибором 372PRC04, который управляет клапаном 372PCV04 на
линии сброса газа в топливную сеть. Для сброса газов расширения из 372В01 на факел
низкого давления при пуске установки или повышенном давлении установлен
отсекатель 372RSV20. Расход газа в топливную сеть завода на выходе 372С05
регистрируется прибором поз. 372FR09. Температура топливного газа
контролируется прибором поз. 372ТI 107. При повышении давления в 372В01 до 12
кгс/см2 срабатывает сигнализация поз.372РАН21.
На случай повышения давления в результате
проскока газа из абсорберов емкость дегазации защищена разрывной мембраной
RD02, рассчитанной на 20 ати со сбросом газа на факел высокого давления.
Световая и звуковая сигнализация верхнего и
нижнего уровней в 372В01 осуществляется приборами поз.372LAH03(62%), 372LAL11
(7%) соответственно.
От слишком высокого уровня емкость 372В01
защищена блокировкой 372LAHCo10 (превышение уровня 82 %) при которой происходит
остановка насоса 372 Р02А и закрытие отсекателей:
RSV05 на выходе амина из куба абсорберов;
RSV01 на входной линии сырого газа;
RSV03 на линии вывода кислых компонентов из
абсорбера 372С01.
Регулирование уровня в емкости дегазации 372В01
осуществляется прибором поз. 372LRC03
Регулирование расхода амина в 372С03
осуществляется прибором поз. 372 FRС10 с коррекцией по уровню в емкости 372
В01. Регулирующий клапан поз.372FCV10 расположен после теплообменников
372Е02А,В,С, что предотвращает дегазацию насыщенного амина в теплообменниках.
Температура потока амина из емкости 372В01
контролируется прибором 372ТI-106.
Температура питания десорбера 372С03
контролируется прибором поз.372TI-118.
Расход пара в рибойлеры 372Е04А1,А2 для подогрева
амина регулируется прибором поз.372FRC17, клапан которого поз. 372FCV17
установлен на трубопроводе подачи пара в 372Е04А1,А2.
Температура парового потока, состоящего в
основном из кислого газа и паров воды и поступающего в верхнюю часть десорбера,
контролируется прибором поз.372ТI-120.
При необходимости десорбер может быть отключен
от коллектора кислого газа шаровым краном с дистанционным управлением
поз.372ROV17.
Расход кислого газа замеряется и регистрируется
прибором поз.372FR19.
Давление в системе десорбции (не более 1.2 ати)
регулируются и регистрируется прибором поз.372PRC17, клапан которого поз.
372PCV17 установлен на линии кислого газа с установки.
Температура кислого газа на выходе из десорбера
контролируется прибором поз. 372ТI-122.
Контроль температуры кислой воды на выходе из
десорбера осуществляется прибором поз. 372TI-126.
Расход воды на промывочную 22 тарелку десорбера
регулируется прибором поз.372FRC-15, клапан которого установлен на линии подачи
промывочной воды на 22 тарелку десорбера.
Уровень в 372В02 контролируется и регистрируется
прибором поз.372LIC17. При низком уровне в 372В02 (9 %) срабатывает
сигнализация поз.372LAL21 при высоком уровне(91 %) поз.372LAH20.
Расход циркулирующей кислой воды на 33 тарелку
десорбера для охлаждения кислого газа регулируется прибором поз. 372FRC-13,
клапан которого FCV13 установлен на линии подачи воды на 33 тарелку.
Контроль температуры кислой воды после
аэрохолодильника 372А01 осуществляется прибором поз. 372TI-129.
При снижении давления в линии нагнетания кислой
воды до 4.1кгс/см2 срабатывает блокировка 372PALS20 и включаются в работу
другой насос 372Р03 (А или В).
Регулирование расхода парового конденсата для
восполнения уносимой с кислым газом паров воды осуществляется прибором поз.
372FIC-29, клапан которого поз. 372 FCV-29 установлен на линии подачи парового
конденсата в 372В02.
Температура регенерированного амина на выходе из
372С03 контролируется прибором поз.372TI124, после 372Е02 А,В,С прибором
поз.372TI114, и непосредственно в 372Т01 прибором поз.TI117.
Уровень в кубовой части десорбера регулируется
прибором поз.372LRC15 клапан которого поз. 372LCV15 установлен на трубопроводе
входа амина в 372ТО1. Десорбер снабжен блокировкой низкого уровня 372LALCо18,
которая срабатывает при понижении уровня до 25 % и вызывает закрытие клапана
372LCV15.
Дополнительно десорбер 372С03 оборудован
сигнализацией низкого уровня поз.372LAL 15 (40 %).
Предусмотрена защита от вакуума при охлаждении с
помощью блокировок 372PALS49. При понижении давления ниже допустимого
(0.2кгс/см2) открываются отсекатель с пневмоприводом поз. 372RSV30, соединяя
десорбер с системой факела низкого давления.
.4 Недостатки существующей системы управления
В процессе проведения предпроектного
обследования установки установлено, что существующая система управления
технологическими процессами не удовлетворяет современным требованиям по уровню
автоматизации и степени защиты технологического оборудования, а именно:
Используемая система щитового управления,
которая значительно уступает по всем показателям системам управления с
использованием автоматизированных рабочих мест (АРМ) на базе персональных
компьютеров.
Применяемые пневматические
контрольно-измерительные приборы и средства автоматизации устарели как
морально, так и физически, что не позволяет обеспечить необходимые точность
измерений, время принятия решений, скорость управления, а также степень
надежности работы системы управления.
Низкий уровень автоматизации и неэффективная
работа автоматики ведут к неоправданному износу технологического оборудования и
нерациональному расходованию всех видов производственных ресурсов, оказывают
негативное психофизиологическое воздействие на обслуживающий персонал ввиду
того, что основная нагрузка по принятию решений о переключениях регулирующих
органов, исполнительных механизмов, контроля за средствами КИПиА падает на
операторов, что может привести к ошибкам операторов, привести к нарушениям
технологического процесса и выводу оборудования из строя
В соответствии со всем выше сказанным существует
необходимость разработки новой автоматизированной системы управления
технологическими процессами (АСУ ТП) и системы противоаварийной защиты (ПАЗ)
технологического оборудования.
.5 Требования к создаваемой АСУТП
Автоматизированная система управления технологическим
процессом 1У372 ГПЗ (АСУТП 1У372 ГПЗ) предназначена для автоматического сбора
данных, автоматизированного контроля технологических параметров, дистанционного
управления и автоматической защиты оборудования на установке 1У372 III очереди
Оренбургского ГПЗ.
Объектом автоматизации является технологический
процесс абсорбционной очистки сырого газа реализованный на установке 1У372 ГПЗ.
Автоматизируемым пунктом управления является операторная III очереди ГПЗ.
.5.1 Цели создания системы
Целями создания системы являются:
обеспечение безаварийной работы технологического
оборудования установок 1У372 ГПЗ;
повышение уровня экологической безопасности
производства;
снижение непроизводительных потерь
материально-технических и топливно-энергетических ресурсов, сокращение
эксплуатационных расходов;
улучшение условий управления производством за
счет организации автоматизированных рабочих мест оперативного технологического
персонала.
Критериями оценки достижения поставленных целей
являются:
достижение высоких технико-экономических
показателей работы за счет поддержания наиболее рационального режима работы
технологического оборудования;
обеспечение надежной и эффективной работы
производственных объектов за счет повышения качества контроля и оперативности
управления режимами работы в соответствии с требованиями технологических
регламентов, своевременного обнаружения и устранения отклонений;
выполнение установленных производственных
заданий по объемам и качеству товарной продукции;
снижение непроизводительных потерь
материально-технических, топливно-энергетических ресурсов и эксплуатационных
расходов;
повышение экологической безопасности
производства;
увеличение длительности межремонтного пробега
технологического оборудования;
улучшение условий труда оперативного технологического
и диспетчерского персонала;
увеличение объема контролируемой оперативной
информации, повышение оперативности контроля и управления (уменьшение
запаздывания поступления оперативной информации и выдачи управляющих
воздействий).
.5.2 Требования к системе в целом
Система должна состоять из двух подсистем:
информационно-управляющей (АСУТП);
противоаварийной защиты (ПАЗ).
Функции, которые должна реализовывать
информационно-управляющая подсистема АСУТП 1У372, подразделяются на
информационные, управляющие и вспомогательные.
Информационные функции:
сбор информации с аналоговых, дискретных и
интеллектуальных датчиков, ручной ввод данных;
обработка информации и расчет значений
параметров и показателей по измеренным сигналам;
обнаружение, сигнализация и регистрация
отклонений технологических параметров от регламентных норм, изменений состояния
оборудования и локальной автоматики, срабатывании блокировок и защит;
расчет средних и интегральных значений
параметров за каждый астрономический час (сутки);
отображение видеокадров (мнемосхемы, графики,
таблицы) на экране монитора;
протоколирование нарушений заданных режимов
работы оборудования, отклонений технологических параметров от регламентных
норм, срабатываний блокировок и защит;
защита информации от несанкционированного
доступа;- контроль и учет наработки технологического оборудования;
накопление истории протекания технологических
процессов на срок не менее 30 суток;
архивирование информации на сменных носителях;
расчет оперативных материальных балансов;
формирование и печать оперативных и отчетных
документов;
реализация процедур обмена информацией между
уровнями системы.
Управляющие функции:
дистанционное управление технологическим
оборудованием (насосы, запорная арматура, вентиляторы и т.п.);
регулирование технологических параметров;
реализация функций местного управления.
Вспомогательные функции:
диагностика состояния комплекса технических
средств системы;
тестирование программных средств;
протоколирование действий эксплуатационного
персонала;
оперативная параметризация (конфигурирование)
системы при изменении средств автоматизации (градуировки датчиков, алгоритмов
регулирования, управления и др.)
Система ПАЗ должна обеспечивать:
защиту технологического оборудования и персонала
в аварийных ситуациях;
световую и звуковую сигнализацию срабатывания
системы защиты;
фиксирование порядка срабатывания системы
защиты;
возможность ручного инициирования системы
защиты.
ПТК системы должен обеспечивать построение
территориально и функционально распределенной иерархической системы управления.
На нижнем уровне должны быть реализованы все
функции регулирования, автоматического управления и защиты. На верхнем уровне
должны быть реализованы централизованный контроль и дистанционное управление
технологическим процессом, формирование и выдача отчетных документов.
Программно-технические средства нижнего уровня
при потере связи с верхним уровнем управления должны обеспечивать работу в
автономном режиме.
Обмен информацией между верхним и нижним уровнем
каждой подсистемы должен осуществляться автоматически.
Средства вычислительной техники нижнего и
верхнего уровней должны размещаться в операторной III очереди.
Система ПАЗ должна функционировать как
независимая структура, имеющая собственные каналы получения информации и выхода
на исполнительные механизмы.
Нижний уровень АСУТП 1У372 должен быть
реализован на базе программируемых контроллеров. Верхний уровень - уровень
оперативно технического персонала должен быть реализован на базе рабочих
станций оператора (РСО). На основе этих РСО должны быть организованы
автоматизированные рабочие места (АРМ) операторов. Для выполнения инженерных
функций по обслуживанию системы должна быть организована инженерная станция.
Программно-технический комплекс (ПТК) системы
должен допускать расширение на всех уровнях управления при вводе новых
технологических объектов управления, увеличения числа аналоговых и дискретных
сигналов, функциональных задач.
При разработке системы должны выполняться
требования следующих документов:
«Основные положения по автоматизации,
телемеханизации и информационно-управляющим системам газоперерабатывающих
производств»;
ПБ 08-389-00 «Правила безопасности для
газоперерабатывающих заводов и производств»;
«Общие правила взрывобезопасности для
взрывопожароопасных химических, нефтехимических и нефтеперерабатывающих
производств. Утв. Госгортехнадзором России 22.12.97 г.».
Надежность электроснабжения системы должна
соответствовать особой группе I категории. Электропитание должно производиться
от двух независимых взаимно резервируемых источников питания, кроме того,
должен быть предусмотрен третий независимый резервный источник питания.
Математическое обеспечение системы должно
включать в себя методы и алгоритмы обработки аналоговых и дискретных сигналов,
контроля, регулирования, управления, расчета топливно-энергетических
показателей и т.д., необходимые для выполнения функций системы.
Информационное обеспечение системы должно
строиться на основе базы данных (БД). В составе БД системы должны
поддерживаться следующие данные:
оперативные данные, содержащие текущее значение
измеряемых параметров и текущее состояние оборудования;
данные, содержащие изменения состояния
технологического оборудования в хронологическом порядке;
данные, содержащие нарушения регламентных норм
технологического процесса в хронологическом порядке;
данные, содержащие тренды измеряемых параметров.
Системное ПО операторских станций (операционная
система) должно обеспечивать работу в реальном масштабе времени.
Системное ПО программируемых контроллеров должно
иметь в своем составе средства тестирования и диагностики аппаратных средств.
Коммуникационные средства системного ПО программируемых котроллеров должны
поддерживать стандартные интерфейсы и протоколы обмена данными.
Инструментальное ПО операторских станций должно обеспечивать
конфигурирование базы данных, процедур обработки данных, создание видеокадров
(мнемосхем) и других элементов операторского интерфейса.
Функциональное ПО операторских станций должно
обеспечивать реализацию (выполнение) созданного операторского интерфейса и
сконфигурированных функций обработки данных, а также защиту от ошибочных
действий операторов.
На всех уровнях системы в техническом и
программном обеспечении должна быть реализована защита от несанкционированного
доступа к информации и функциям системы с разделением уровней доступа для
различных категорий пользователей. С этой целью должна использоваться
регистрация пользователей по личному идентификатору и паролю и ведение
протоколов регистрации и их наиболее ответственных действий.
.5.3 Требования к техническому обеспечению
КТС системы должен разрабатываться на базе
серийно выпускаемых средств автоматизации и вычислительной техники.
Программируемые контроллеры и ПТК в целом должны
иметь Российский сертификат Госстандарта РФ и разрешения на выпуск и
применение, выданные органами Госгортехнадзора России.
Датчики, исполнительные механизмы,
устанавливаемые на объекте, должны иметь взрыво- или искробезопасное
исполнение. Датчики параметров, по которым производится срабатывание алгоритмов
защиты, должны подключаться только в систему ПАЗ. Разветвление сигнала не
допускается.
Для датчиков, не имеющих блоков питания
(сигнализаторы с выходом на «сухой контакт», термометры сопротивления,
термопары и др.), должны быть предусмотрены индивидуальные барьеры
искробезопасности с питанием от системы.
Сеть связи нижнего и верхнего уровней системы
должна быть резервированной.
Контроллеры АСУТП и ПАЗ должны иметь
резервированные процессорные модули и обеспечивать возможность замены
неисправных модулей без нарушения функционирования системы.
.5.4 Выбор анализатора для определения
концентрации H2S в регенерированном амине
Предпринятые газоперерабатывающим заводом в 90-х
годах попытки внедрения датчиков - анализаторов TRACOR ATLAS модель 722 (США),
использующих фотоколориметрический метод определения содержания H2S, для
решения задачи управления процессом десорбции аминового сорбента оказались
неудачными. Основной причиной этого стало повышенное загрязнение амина
абразивными частицами ржавчины, песка, в результате чего происходило быстрое
засорение устройств отбора пробы. Применение входных фильтров на линиях
пробоотбора также не дало эффекта. Замена фильтров требовалась через каждые 2-3
часа, что в условиях действующего производства было не приемлемым. Кроме того, анализаторы
обладали временем отклика 3,5 мин, что не обеспечивало должного качества
управления процессом.
В результате проведенного поиска информации о
наличии современного аналитического оборудования, обеспечивающего возможность
реализации идеи построения контура автоматического управления процессом
десорбции (регулирования концентрации Н2S в регенерированном амине), выбран
спектрофотометрический поточный анализатор АМЕТЕК модель 4650. При разработке
данного анализатора фирма «АМЕТЕК» (США) учла все конструктивные и технические
недоработки, допущенные ранее производителями подобного оборудования.
Спектрофотометрический анализатор АМЕТЕК 4650 специально создан для
непрерывного измерения концентрации H2S в очищенном амине и решения задачи
минимизации потребления пара на его регенерацию и на сегодняшний день не имеет
аналогов во всем мире. Для предохранения измерительной ячейки от загрязнения
пробоотборная линия анализатора защищена самоочищающимся фильтром, а время
отклика составляет менее 15 секунд.
Краткое техническое описание анализатора АМЕТЕК
4650
Анализатор модели 4650 (рисунок 2.2)
спектрофотометрический поточный анализатор, предназначенный для измерения
концентрации H2S в очищенном амине после десорбера. Контроль максимально
допустимого содержания H2S в этой точке позволяет оптимизировать процесс
регенерации аминового сорбента и значительно сократить энергозатраты на
регенерацию.
В анализаторе 4650 используется фотометрический
метод измерения поглощения излучения в ультрафиолетовой области (УФ) молекулами
газа. Поглощение света H2S измеряется на длине волны 265 нм, и преобразуется в
значение концентрации. Длина волны 365 нм используется в качестве референсной
для отслеживания медленных изменений в оптической системе (загрязнение окошек
ячейки, старение источника света и других оптических элементов). Коррозионная
способность раствора амина приводят к тому, что фоновое поглощение раствора со
временем возрастает. Для коррекции возрастания фонового поглощения и
периодического обнуления базовой линии анализатора часть пробы подается в блок
дегазации, в котором из нее под действием разряжения удаляется практически весь
растворенный сероводород. Получаемый таким образом «нулевой» стандарт,
содержащий менее 50 ррmv H2S используется для автоматической коррекции базовой
линии.
Световой поток, проходящий через измерительную
ячейку с анализируемым веществом, разделяется на два луча с помощью
полупрозрачного зеркала. Один луч фильтруется от всех длин волн, за исключением
той, которая поглощается анализируемым веществом. Второй луч фильтруется от
всех длин волн, кроме тех, которые не поглощаются анализируемым компонентом.
Сигналы фотодиодов, на которые попадают отфильтрованные лучи, обрабатываются
микропроцессором. Такой двухлучевой метод позволяет компенсировать влияние мутности
анализируемой пробы, колебаний интенсивности света, загрязнение и
"старение" оптики.
Для предохранения ячейки от загрязнения и
конденсации проба проходит специальный самоочищающийся фильтр, а ее температура
поддерживается встроенным термостатом на уровне (120±1) °С. Для защиты от
погодных условий и обеспечения требований по взрывобезопасности анализатор
поставляется смонтированным в специальном шкафу, с паровым или электрическим
обогревом.
Таблица 2.2. - Технические характеристики
анализатора АМЕТЕК 4650
|
Диапазон
измерения
|
0-1
г/л (возможны другие диапазоны)
|
|
Погрешность
измерения
|
±
4% от диапазона
|
|
Время
отклика
|
не
более 15 сек для 90 % ступенчатого изменения концентрации
|
|
Температура
анализируемого потока
|
до
130 °С
|
|
Давление
пробы
|
до
13,8 МПа
|
|
Подключение
к точке отбора
|
линии
отбора и сброса пробы ½”
с
парообогревом (в комплекте с прибором)
|
|
Установка
нуля
|
автоматическая
|
|
Аналоговые
выходы
|
два
независимых 4-20 мА
|
|
Интерфейс
|
RS
485
|
|
Управление
устройствами
|
8
релейных выходов
|
|
Питание
|
220
В, 50 Гц Воздух КИП 400-700 к Па, 4 м3/час Вода с давлением, большим на
70-350 к Па, чем в точке возврата пробы, 60 л/час
|
|
Исполнение
|
1ЕхdIICT6
|
|
Наработка
на отказ
|
100000
часов
|
|
Стоимость
комплекта,USD
|
136700
|
.5.5 Структурная схема контура автоматического
регулирования
Показателем эффективности процесса десорбции
является концентрация сероводорода в очищенном амине, а целью управления -
поддержание определенного значения этой концентрации.
Внешние возмущения: изменение расходов раствора
аминового сорбента, пара, кислой воды на орошение колонны, концентрации кислых
компонентов в богатом амине, и других теплофизических параметров оказывают
большое влияние на тепло- и массопередающую способность десорбера.
Десорбер является объектом с большим
запаздыванием, поэтому внешние возмущения успевают существенно изменить режим
всей колонны, прежде чем изменится состав целевых продуктов и в том числе
концентрация H2S в очищенном амине. Таким образом, система одноконтурного
регулирования концентрации Н2S в регенерированном амине (рисунок 2.3а), для
данного технологического процесса, не применима. Управляющее воздействие на
исполнительный механизм (регулирующий клапан), формируемое на основании
сравнения значений измеренной анализатором (позиция QT02 1-ая полулиния, и позиция
QT04 2-ая полулиния) и заданной концентрации H2S в очищенном амине, приводит к
изменению расхода пара подаваемого в рибойлер. При этом, как уже было сказано
ранее, концентрация H2S в потоке регенерированного амина - это параметр,
обладающий большим запаздыванием, и до того момента пока он будет
скомпенсирован, изменится режим всей колонны. К примеру, выход значения
температуры в кубе колонны за пределы, установленные регламентом (более 128
°С), приведет к увеличению потерь аминового сорбента и кислой воды, которые
будут уноситься вместе с потоком кислого газа.
При решении проблемы построения контура
автоматического регулирования концентрации Н2S в регенерированном амине были
использованы рекомендации технологов завода. Улучшение качества управления
процессом достигается введением дополнительного контура и использования системы
каскадно-связанного регулирования. В качестве
вспомогательного параметра, обладающего малым временем запаздывания,
учитывающего все внешние возмущения, воздействующие на объект регулирования и
характеризующего процесс регенерации (выпаривания кислых компонентов) амина
принята температура верха колонны (22 тарелка) позиция TT120 (TT121). Таким
образом, окончательный вариант схемы автоматического регулирования расхода пара
на десорбцию амина, представленный на рисунках 2.23б, 2.23в, обеспечивает
компенсацию внешних возмущений, воздействующих наполучение целевого продукта с
заданной концентрацией кислых компонентов (Н2S).

Рисунок 2.3а - Структурная схема одноконтурного
регулирования концентрации Н2S в регенерированном амине.
Рисунок 2.3б - Структурная схема
каскадно-связанного регулирования концентрации Н2S в регенерированном амине.

Рисунок 2.3в - Схема контура
автоматического регулирования концентрации Н2S в регенерированном амине.
.5.6 Разработка структурной схемы
АСУ ТП
В настоящее время автоматизация
большого количества производственных процессов выполняется с использованием
современных информационных технологий. На нижних уровнях автоматизации
применяются интеллектуальные датчики, объединенные в промышленные
информационные сети, программируемые логические контроллеры (ПЛК) на базе
микропроцессорных компонентов. На верхних уровнях - вычислительные сети
масштабов предприятия, автоматизированные рабочие места операторов, системы
хранения технологической информации (базы данных) и другие
программно-технические средства. Совокупность программно-вычислительных средств
автоматизации технологического производства и их инфраструктура образует
программно-технический комплекс (ПТК) технологического процесса, который
реализует заданные функции контроля, учета, регулирования, последовательного
логического управления и выдает результаты на экран дисплея рабочей станции
оператора и управляющие воздействия на исполнительные механизмы объекта
автоматизации.
Структура АСУ ТП 1У372 (рисунок 2.4)
определена, исходя из характеристик технологического процесса установки,
номенклатуры и характеристик технологического оборудования, а также выполняемых
системой функций. АСУТП 1У372 является 2-х уровневой системой централизованного
контроля и управления технологическими процессом абсорбционной очистки газа с
функционально распределённой, территориально сосредоточенной иерархической
структурой.
Верхний уровень управления АСУ ТП и
системы ПАЗ - уровень оперативного технологического персонала - образован
программно - техническими средствами (ПТС) двух автоматизированных рабочих мест
(АРМ №1,2) оператора-технолога и администратора системы. Верхний уровень
обеспечивает отображение информации о работе установки в удобном для оператора
виде, индикацию предупредительной и аварийной сигнализации, состояния агрегатов
и оборудования, ведение журналов работы системы, протоколирование действий
персонала, ведение архивов технологических параметров, вывод режимных листов по
запросу оператора, реализацию функций дистанционного управления технологическим
процессом и оборудованием.
Реализация функций верхнего уровня
АСУ ТП 1У372 осуществляется с автоматизированных рабочих мест (АРМ)
оператора-технолога и администратора системы, оборудованных операторской
(рабочей) станцией серии AW70 компании Foxboro (Invensys, США).
АРМ оператора-технолога и
администратора системы размещается в операторной III-ей очереди
газоперерабатывающего завода и объединяются в полносвязанную (mesh) локальную
вычислительную сеть.
Нижний уровень управления АСУ ТП и
системы ПАЗ включает в себя контроллер автоматизированной системы управления и
контроллер системы противоаварийной защиты, модули ввода/вывода,
коммуникационные модули, агрегатная автоматика, линии связи и др.
На нижнем уровне АСУ ТП и системы
ПАЗ в автоматическом режиме обеспечивается контроль, регулирование и управление
технологическими процессами, поддержание заданных режимов работы.
Контроллеры нижнего уровня котроллер
АСУ ТП (FCP270) и контроллер ПАЗ (Trident) функционируют полностью автономно,
то есть, каждый контроллер имеет свои независимые информационные каналы и
каналы управления. Отказы в работе одного из контроллеров не оказывают влияния
на работу другого контроллера. Контроллер ПАЗ реализует весь комплекс функций
контроля и управления - сбор, обработка, анализ входной информации и
формирование сигналов управления - выполняет автоматически без участия
оператора - технолога и поэтому независим от рабочей станции верхнего уровня.
Выделение в составе АСУ ТП 1У372
подсистемы ПАЗ обусловлено необходимостью достижения высокой надежности системы
защиты.
Система ПАЗ обеспечивает:
контроль над параметрами,
определяющими взрывобезопасность технологического объекта управления;
контроль работоспособности средств
ПАЗ;
постоянный анализ изменения
параметров в сторону критических значений и предупреждение возможных аварий;
противоаварийное действие средств
ПАЗ, прекращающих развитие опасной ситуации;
выдачу информации о состоянии
установки на верхний уровень системы.
Надежность системы ПАЗ
обеспечивается аппаратным резервированием, временной и функциональной
избыточностью и наличием функции самодиагностики программно-технических
средств.
Рисунок 2.4 - Структурная схема АСУ
ТП 1У372
1.5.7 Описание функционирования
системы
Для функционирования системы
управления выделены следующие типовые каналы измерения и управления.
Канал измерения температуры.
Канал измерения температуры
предназначен для достоверного получения значения измеряемой температуры.
Аналоговый канал измерения давления, состоит:
термопреобразователь Метран ТСПУ 276
Ех;
линия связи;
плата аналогового ввода;
функциональный программный блок.
Термопреобразователь состоит из
первичного преобразователя и измерительного преобразователя встроенного в
головку первичного преобразователя. Измерительный преобразователь (ИП)
преобразует сигнал, поступающий с выхода первичного преобразователя, в
унифицированный токовый выходной сигнал 4-20 мА, что дает возможность
построения АСУ ТП без применения дополнительных нормирующий преобразователей. В
состав ИП входит компенсатор нелинейности входного сигнала и компенсатор
температуры холодного спая.
Искробезопасность электрической цепи
обеспечивается барьером искробезопасности и искробезопасным источником питания.
Питание датчика 12-36В. Подключение
датчика к системе, к плате аналогового ввода, унифицированных токовых сигналов,
производится по двухпроводной схеме, с питанием схемы от системы.
Для получения значения температуры в
системе в физических единиц конфигурируется программный модуль аналогового
ввода, где указываются шкала, ед. измерения, и может проводиться фильтрация
сигнала и проверка на диапазоны сигнализации. Диагностика канала измерения
происходит:
непрерывно на аппаратном уровне -
исправность термопреобразователя и платы ввода;
с частотой опроса
термопреобразователя, при программном обращении к функциональному модулю.
Система может выявлять следующие
виды неисправностей:
неисправность термопреобразователя;
обрыв или короткое замыкание линии
связи;
недостоверность показаний.
Канал измерения давления.
Канал измерения давления
предназначен для достоверного получения значения измеряемого давления.
Аналоговый канал измерения давления,
состоит:
датчик давления Метран 49 ДИ (ДД)
код МП1;
линия связи;
плата аналогового ввода;
функциональный программный блок.
Измеряемое давление подводится к
открытой приемной мембране первичного преобразователя датчика и через шток
передается на измерительную мембрану, вызывая ее прогиб и изменение
электрического сопротивления кремниевых пьезорезисторов мостовой схемы
чувствительного элемента. Электронное устройство датчика преобразует это
изменение электрических сопротивлений в стандартный сигнал постоянного тока. В
памяти сенсорного блока хранятся в цифровом формате результаты калибровки
сенсора во всем диапазоне давлений и температур. Эти данные используются
микропроцессором для расчета коэффициентов коррекции выходного сигнала.
Цифровой сигнал с платы АЦП сенсорного блока с коэффициентами коррекции
поступает на вход электронного преобразователя, микроконтроллер которого
производит коррекцию и линеаризацию характеристики сенсорного блока, вычисляет
скорректированное значение выходного сигнала и передает его в цифро-аналоговый
преобразователь, который преобразует его в унифицированный токовый сигнал 4-20
мА.
Погрешность измерений датчика 0,5 %
при 20 0С.
Питание датчика 12-36В. Подключение
датчика к системе, к плате аналогового ввода, унифицированных токовых сигналов,
производится по двухпроводной схеме, с питанием схемы от системы.
Для получения значения давления в
системе в физических единицах конфигурируется программный модуль аналогового
ввода, где указываются шкала, ед. измерения, и может проводиться фильтрация
сигнала и проверка на диапазоны сигнализации.
Диагностика канала измерения
происходит:
непрерывно на аппаратном уровне -
исправность датчика и платы ввода;
с частотой опроса датчика, при
программном обращении к функциональному модулю.
Система может выявлять следующие
виды неисправностей:
неисправность датчика;
обрыв или короткое замыкание линии
связи;
неисправность платы ввода;
недостоверность показаний.
Канал измерения расхода.
Канал измерения расхода предназначен
для достоверного получения значения измеряемого расхода. Аналоговый канал
измерения расхода, состоит:
датчик расхода Метран 49 ДД код МП1;
линия связи;
плата аналогового ввода;
функциональный программный блок.
Канал измерения уровня
Канал измерения уровня предназначен
для контроля за уровнем жидкости, уровнем поверхности раздела двух
несмешивающихся жидкостей. Аналоговый канал измерения уровня, состоит:
датчик уровня Метран 49 ДД код МП1;
линия связи;
плата аналогового ввода;
функциональный программный блок.
Температура технологической среды от
минус (-20 до + 149) ° С.
Канал измерения концентрации
Канал измерения концентрации
предназначен для достоверного получения значения концентрации сероводорода Н2S
в очищенном газе и регенерированном амине.
Аналоговый канал измерения
концентрации Н2S, состоит:
анализатор концентрации Н2S;
линия связи;
плата аналогового ввода;
функциональный программный блок.
Измерение значения концентрации Н2S
в очищенном газе осуществляется анализатором TRACOR ATLAS (модель 722). Под
воздействием потока газа содержащего сероводород на поверхности ленты,
пропитанной уксуснокислым свинцом, образуется коричневое пятно. Концентрация
Н2S определяется по скорости формирования пятна с помощью оптической системы и
электронного блока, выдающего унифицированный токовый сигнал 4-20 мА.
Измерение значения концентрации Н2S
в регенерированном амине осуществляется спектрофотометрическим поточным
анализатором АМЕТЕК модель 4650 (описание представлено в главе 2.1.2)
Диагностика канала измерения
происходит:
непрерывно на аппаратном уровне -
исправность анализатора и платы ввода;
с частотой опроса анализатора, при
программном обращении к функциональному модулю.
Система может выявлять следующие
виды неисправностей:
неисправность анализатора;
обрыв или короткое замыкание линии
связи;
неисправность платы ввода;
недостоверность показаний.
Аналоговый выходной канал
Аналоговый выходной канал состоит
из:
функционального модуля ПИД
регулирования;
платы аналогового вывода;
электропневмопреобразователя
регулирующего клапана.
Функциональный плата
ПИД-регулирования выдает через плату аналогового вывода системы токовый сигнал
4-20 мА в электропневмопреобразователь, который преобразует его в
пневматический сигнал. Подключение регулирующего клапана к каналу модуля вывода
унифицированных токовых сигналов производится по двухпроводной схеме, с
питанием схемы от системы. Искробезопасность электрической цепи обеспечивается
встроенным барьером искробезопасности и искробезопасным источником питания.
Диагностика канала измерения
происходит непрерывно на аппаратном уровне - определяется исправность платы
вывода.
Дискретный входной канал.
Дискретный входной канал
предназначен для определения состояния исполнительного механизма и имеет два
состояния: замкнут или разомкнут.
Дискретный входной канал, состоит
из:
датчика состояния;
линии связи;
платы дискретного ввода;
функционального программного блока.
Датчиками состояния являются
контакты реле или концевые выключатели. Подключение датчика к системе
производится по двухпроводной схеме, с питанием схемы от системы. При
необходимости, искробезопасность электрической цепи обеспечивается встроенным
барьером искробезопасности и искробезопасным источником питания. Для получения
состояния датчика конфигурируется программный модуль дискретного ввода,
который, как правило, входит в функциональный блок управления исполнительным
механизмом.
Диагностика канала измерения
происходит непрерывно на аппаратном уровне - диагностикой платы ввода.
Дискретный выходной канал.
Дискретный выходной канал
предназначен для управления исполнительными механизмами и имеет два состояния:
замкнут или разомкнут.
промежуточного силового реле;
линии связи;
платы дискретного вывода;
функционального программного блока
Управляющий сигнал, как правило,
выдается сконфигурированным модулем в составе функционального блока управления
исполнительным механизмом. Реле, обеспечивает выдачу выходного сигнала 240В
перем.т. при 5А (внешний источник) с источником напряжения, подаваемым в контур.
Диагностика канала управления
происходит непрерывно на аппаратном уровне - диагностикой платы вывода.
По результатам обработки входной
информации производится формирование и передача информации на верхний уровень
системы и отрабатываются алгоритмы управления.
Аналогичным образом осуществляется
дистанционное управление ИМ или программными регуляторами с рабочих станций
операторов-технологов. Отличием является то, что входной информацией для ПЛК
являются команды в цифровом виде. ПЛК обеспечивают автоматическую
самодиагностику в сети управления, а также выполнение операций по управлению
каналами ввода/вывода, управлению обменом данных в коммуникационной сети.
Работа оператора-технолога с
использованием рабочей станции заключается в интерактивном (диалоговом)
наблюдении за ходом технологического процесса и состоянием оборудования,
дистанционном управлении ИМ (исполнительными механизмами) и контурами
регулирования (при необходимости), получении отчетных документов.
Организация человеко-машинного
интерфейса производится с использованием SCADA-системы I/A Series (FoxView)
компании FOXBORO.
Контроль и управление осуществляется
с использованием следующих форм представления информации:
мнемосхемы;
тренды (графики изменения во времени
аналоговых переменных);
архивные данные;
сигнализации (выдача визуальных и
звуковых сообщений);
протоколы;
отчеты.
2. Описание ПТК
.1 Общее описание системы I/A Series
Возросшая конкуренция на мировых
рынках заставляет компании как можно быстрее автоматизировать свои
производственные мощности и объединять их в единую систему. Системы I/A Series
отвечают этим требованиям и обеспечивают возможность расширения для решения
постоянно усложняющихся прикладных задач. Компания Foxboro постоянно
разрабатывает новые функции для I/A Series, которая является первой в мире
открытой промышленной системой.
Системы промышленной автоматики
должны быть построены на основании такого решения сегодняшних задач, которое
будет способно справляться с проблемами завтрашнего дня. Для систем I/A Series
таким фундаментом является системная архитектура.
Эти системы не только реализуют
гибкое и экономичное решение для современных задач автоматизации, но и
обеспечивают архитектуру, на которой в будущем можно построить информационную и
автоматизированную систему управления масштаба одного или нескольких
предприятий:
Размер системы, от небольших систем,
управляющих локальным оборудованием и до крупных и мощных систем, использующих
локальные и широкомасштабные вычислительные сети.
Модульный принцип объединения
различного оборудования и программного обеспечения в соответствии с задачами и
расположением
Система является распределенной как
на функциональном уровне, так и на физическом
Надежный и удобный интерфейс
пользователя, использующий графические дисплеи высокого разрешения и
многооконный режим работы
Низкая общая стоимость работ по
наладке, обучению персонала, эксплуатации и обслуживанию
Большой срок эксплуатации
промышленных систем и сетей с открытой за счет соответствия международным
стандартам оборудования, программного обеспечения и связи
Интеграция с другим оборудованием с
помощью стандартных сетей связи и объектно - ориентированного
телекоммуникационного программного обеспечения
Совместимость с уже эксплуатируемым
оборудованием, обеспечивающая защиту уже сделанных вложений в системную
интеграцию и прикладные программы
Поддержка прикладных программ
третьих фирм, благодаря чему достигается практически неограниченная гибкость
поддержки дополнительных функций. Система I/A Series разрабатывалась на основе
международных стандартов оборудования, программного обеспечения и связи, за
счет чего обеспечивается большой жизненный цикл системы. Кроме того, компания
Foxboro в своей работе соблюдает такие промышленные стандарты и стандарты
качества, как Factory Mutual, ISA и ISO 9001. Благодаря этому Промышленное
программное обеспечение I/A Series переносимо на современные совместимые
компьютерные платформы, такие как персональные компьютеры и рабочие станции. В
систему I/A Series интегрированы более 100 интеллектуальных полевых устройств и
по мере появления новых устройств они также могут быть включены в систему.
Соблюдение стандартов для
операционных систем, языков программирования и баз данных гарантирует
переносимость программного обеспечения на современные открытые платформы вычислений,
а также сохранение инвестиций в ПО при переходе на новые поколения систем I/A
Series.
Системы I/A Series отличают низкие
расходы на установку, подготовку персонала, эксплуатацию и обслуживание. Все
аппаратные модули I/A Series выполнены как усиленные конструкции, могут
работать в экстремальных климатических условиях и устойчивы к механическим
воздействиям и электромагнитным излучениям.
При использовании системных
компонентов I/А Series размеры системы практически неограниченны. Самая
маленькая система может состоять из одной персональной рабочей станции или
единственного узла с несколькими модулями.
Модульное построение системы I/A
Series обеспечивает ее относительно несложное включение в существующее систему.
Малая система может постепенно наращиваться до уровня интегрированной системы
автоматизации и информации масштаба предприятия. Это обеспечивает гибкость
планирования внедрения начиная с малой системы и позволяет постепенно развивать
ее по мере появления новых задач, не выходя при этом за рамки соответствующей
статьи бюджета предприятия./A Series представляет собой новое поколение
открытых промышленных систем управления, использующих самые передовые
технологии и позволяющих выйти на новый уровень решения задач автоматизации
предприятий.
.1.2 Контроллеры
При выборе моделей и количества
контроллеров учитывались следующие факторы:
число контуров управления;
число входов/выходов аналоговых и
дискретных сигналов;
необходимость аппаратного
резервирования контроллеров;
унификация используемых модулей системы;
возможность расширения небольшой
полнофункциональной системы управления 1У372 до более крупной и мощной
автоматизированной системы, позволяющей управлять всей цепочкой технологических
процессов 1У370.
В АСУ ТП 1У371 в качестве
программируемых логических контроллеров (ПЛК) применены контроллеры серии
FCP270 компании FOXBORO (рисунок 2.5)

Рисунок 2.5 - Внешний вид FCP270
Полевой управляющий процессор FCP270
(см. таблицу 2.3) является факультативно отказоустойчивой станцией, которая
выполняет функции автоматического регулирования, синхронизации, логического и
последовательного управления вместе с подключенными модулями Fieldbus (FBM) и
другими устройствами интерфейса с технологическим процессом. Он также выполняет
сбор данных (с помощью модулей FBM и/или других устройств) и обнаружение и
уведомление об аварийных сигналах.
Таблица 2.5 - Основные
характеристики FCP270
|
Основной
процессор
|
Встроенная
ОС
|
Память
процессора
|
Процессор
ввода/вывода
|
Энергонеза-висимая
память
|
Шина
памяти
|
|
Elan
AMD 520 100 Mhz
|
32-bit
Nucleus Plus
|
16-MB
SDRAM 100 Mhz
|
CommControl
ASIC
|
32-MB
Flash RAM
|
66
Mhz
|
обеспечивает следующие новые и улучшенные
функции по сравнению с традиционными системами:
прямое соединение через волоконно-оптический
кабель 100 Мб/сек Ethernet с сетью управления Mesh;
опция отказоустойчивой работы, которая позволяет
получить улучшенный коэффициент готовности и безопасность, используя уникальное
сравнение сдвоенных контроллеров для всех исходящих сообщений;
надежное управление с помощью полевых устройств
(100Мб/сек волоконно-оптический кабель Ethernet, контроллер, 2Мб/сек шина
Fieldbus, модули FBM серии 200, клеммные сборки и источник питания FPS400-24);
соединение с Ethernet или с последовательными
устройствами через FDSI (модули FBM230, FBM231, FBM232 и FBM233), что позволяет
подключать новые устройства без каких-либо изменений программного обеспечения
контроллера;
факультативная глобальная система
позиционирования позволяет выполнять внешнюю синхронизацию;
факультативный регистратор данных переходных
процессов (TDR) позволяет осуществлять выборку аналоговых данных с временем
выборки 10мсек для последующего анализа событий, используя анализатор данных
переходных процессов (TDA) данные анализатора TDA факультативно имеют отметки
времени с точностью 1 мкс;
интерфейс инфракрасного карманного ПК позволяет
устанавливаться и считывать леттербаг контроллера;
образ, резидентно находящийся в памяти, для
быстрой начальной загрузки станции (время загрузки менее 10 секунд);
улучшенная производительность контроллера,
выполнение команд блока в секунду равно 10 000 для FCP270 по сравнению с 3400
для СР60;
до 4000 блоков могут быть сконфигурированы для
FCP270 (или отказоустойчивой пары FCP270);
расширяемая лицензия позволяет начать с небольшой
полнофункциональной системы управления.
улучшение аварийной сигнализации для
функциональных блоков: повторная сигнализация в случае изменения приоритета
аварийных сигналов, повторная сигнализация, основанная на времени, подавление
аварийных сигналов, основанное на времени.
Отказоустойчивая версия FCP270 состоит из двух
параллельно работающих модулей с двумя отдельными соединениями с сетью
управления Mesh. Два модуля управляющего процессора, связанные друг с другом
как отказоустойчивая пара, обеспечивают непрерывную работу объекта управления в
случае практически любой аппаратной неисправности одного из модулей этой пары.
Оба модуля принимают и обрабатывают информацию
одновременно, и неисправности обнаруживаются самими модулями. Одним из важных
методов обнаружения неисправности является сравнение коммуникационных сообщений
на внешнем интерфейсе модуля.
При обнаружении неисправности, коммуникационное
сообщение прерывается, и выполняется самодиагностика обоих модулей, чтобы
определить, какой из модулей является неисправным. Затем исправный модуль
принимает на себя управление, не оказывая влияния на нормальную работу системы.
После этого сообщение о прерванном коммуникационном сообщении передается
исправным модулем через механизмы повторной передачи коммуникационного
протокола.
При использовании системы с полевым управляющим
процессором FCP270 подсистема, монтируемая на рейку DIN, состоит из следующих
основных функциональных элементов (на рисунке 2.6 показана схема соединений
этих элементов):
полевой управляющий процессор 270 (FCP270);
модульные базовые платы - модульные базовые
платы, монтируемые на рейку DIN, обеспечивают различное количество позиций для
монтажа модулей, которые можно увеличивать на 2, 4 или 8 модулей, при этом они
могут устанавливаться в вертикальном или горизонтальном положении;
модули Fieldbus (FBM) - модули FBM служат в
качестве интерфейса между полевыми устройствами и управляющим процессором
системы I/A Series, они выполняют необходимое преобразование данных,
обеспечивая полную поддержку для аналоговых измерений, считывания дискретных
данных, аналогового или дискретного управления и цифровой связи4
системные интеграторы данных сторонних
поставщиков (FDSI) - эти модули FBM обеспечивают гибкую и расширяемую
платформу, и интерфейс, так что контроллер, такой как FCP270, может
осуществлять связь с любым полевым устройством или системой сторонних
поставщиков, которая поддерживает 10/100Ethernet или последовательную связь
RS-232/RS-422/RS-485;
межмодульная шина Fieldbus - 2Мб/сек HDLC (высокоуровневый
протокол управления каналом) факультативно резервированная последовательная
шина, используемая для соединения всех модулей, монтируемых на базовую плату
(FBM и FCP);
сеть управления Ethernet - 100 Мб/сек
факультативно резервированная сеть Mesh, обеспечивающая обмен данными для
системы I/A Series, использует асинхронный протокол и соответствует общим
требованиям связи Ethernet;
клеммные сборки (ТА) - клеммные сборки являются
модулями соединения с полевыми сигналами, обеспечивающими факультативное
нормирование сигналов и защиту цепей, необходимые для соответствующего модуля
FBM.
Для обеспечения трафика отказоустойчивых FCP270
с верхним уровнем требуется пара разветвителей/объединителей, по одному для
каждого канала сети управления Mesh. Разветвитель/объединитель имеет три
соединения 100Мб/сек: одно с первичным модулем отказоустойчивой пары, одно с
вторичным модулем и одно с сетью Mesh. Один разветвитель/объединитель пары
соединен с одним коммутатором Ethernet, другой соединен с еще одним коммутатором
Ethernet. Разветвитель/объединитель подключается через волоконно-оптические
кабели. Входящий трафик из сети Mesh разделяется и передается на каждый
контроллер FCP270. Исходящий трафик передается от первичного модуля, которым
может быть любой из двух физических модулей, в сеть Mesh.

Рисунок 2.6 - Схема соединений элементов с
использованием FCP270
.1.3 Модули Fieldbus (FBM)
Модули Fieldbus (FBM) являются компактными,
высокопроизводительными модулями распределенного ввода/вывода технологических
сигналов (рисунок 2.7). Они выполняют преобразование сигналов, необходимое для
сопряжения электрических входных сигналов, поступающих на/от полевых датчиков,
с факультативно отказоустойчивой станцией управления системы I/A Series.
Для обеспечения поддержки различных аналоговых
измерений, дискретных измерений и требований по аналоговому или дискретному
управлению существует широкий диапазон типов модулей FBM. Все эти различные
типы модулей FBM являются компактными и конструктивными идентичными модулями,
корпус которых изготовлен из штампованного алюминия. Светодиодные индикаторы,
расположенные на лицевой стороне каждого модуля, обеспечивают визуальную
индикацию состояния модуля FBM.

Рисунок 2.7 - Типичный модуль
Fieldbus
- интерфейсный модуль дискретного
входа обеспечивает 32 входных канала, при этом на каждый канал поступает сигнал
по двухпроводной линии от источника напряжения постоянного тока до 30В
постоянного тока. Соответствующие клеммные сборки (ТА) предусмотрены для
дискретных входных сигналов 30В постоянного тока, 120В переменного тока/125В
постоянного тока или 240В переменного тока. Эти каналы изолируются по группам -
они электрически разделяют модули, но не разделяют каналы на одном и том же
модуле.
Помимо выполнения преобразования
сигналов, необходимого для сопряжения электрических входных сигналов от полевых
датчиков с факультативно резервируемой шиной Fieldbus, данный модуль выполняет
прикладные программы для дискретного входа, многозвенной логики, отсчета
импульсов и последовательности событий с конфигурируемыми опциями времени
фильтрации входа и отказоустойчивой конфигурации.- интерфейсный модуль
дискретного выхода с внешним источником и изолированными каналами имеет 16
выходных каналов дискретных сигналов, которые поступают от внешнего источника,
с номинальным значением 2А для 60В постоянного тока. Соответствующие клеммные
сборки (ТА) предусмотрены для дискретных выходных сигналов для нагрузок до 5А
при 220В переменного или 125 В постоянного тока, для релейных выходов или
релейных выходов с распределением питания и предохранителями. Каждый выход
гальванически изолирован от других каналов и земли.
Помимо выполнения преобразования
сигналов, необходимого для сопряжения электрических выходных сигналов на
полевые датчики от станции управления, данный модуль выполняет прикладную
программу ввода/вывода дискретных сигналов с поддержкой многозвенной логики и
конфигурируемой опцией отказоустойчивой конфигурации для его выходов.-
интерфейсный модуль резервируемого выхода 0-20мА с изолированными каналами
имеет восемь изолированных выходных каналов 0-20мА. Данный модуль может
использоваться без резервирования (один модуль)
или в паре с другим для
резервирования (два модуля FBM 237). Каждый канал гальванически изолирован от
других каналов и земли.
Когда он используется в паре с
другим модулем, эти модули позволяют получить резервируемую конфигурацию на
уровне FBM. Для получения резервируемого выхода, адаптерный модуль
резервирования устанавливается на двух соседних кабельных разъемах базовой
плиты, чтобы получить соединение с помощью одного кабеля. Один кабель
используется для соединения адаптера с резервированием и соответствующей
клеммной сборки (ТА). Каждый модуль независимо пытается зафиксировать выходной
сигнал(ы) на его заданном уровне, и каждый независимо протоколирует наблюдаемое
значение входных сигналов. Резервируемый блок аналогового выхода в программном
обеспечении системы управления проверяет достоверность каждого выхода в
соответствии с информацией, поступающей на/от модуля.- интерфейсный модуль
дифференциального входа 0-20 мА содержит 16 каналов аналогового входа 20 мА
постоянного тока, при этом каждый канал принимает аналоговый входной сигнал по
двухпроводной линии от датчика 4-20мА или источника 20мА с собственным
энергоснабжением. Каналы модуля FBM211 изолируются по группам - они
электрически разделяют модули, но не разделяют каналы на одном и том же модуле.
Помимо выполнения преобразования
сигналов, необходимого для сопряжения электрических входных сигналов от полевых
датчиков с факультативно резервируемой шиной Fieldbus, данный модуль выполняет
прикладную программу аналогового входа с конфигурируемыми опциями пределов
времени интегрирования и скорости изменения.
Полученные от датчиков сигналы
проходят через искробезопасные барьеры и обрабатываются встроенными в платы
ввода аналого-цифровыми преобразователями и затем, поступают на внутреннюю
цифровую шину данных и в контроллер. После проведения контроллером операций
контроля, регистрации и вычислений полученные, в соответствии со стратегией и
алгоритмами управления, выходные сигналы передаются на платы вывода.
В соответствии со сводным перечнем
сигналов ввода/вывода (таблица 2.6) и с учетом обеспечения резерва по каналам в
таблице 2.7 представлены типы и количество модулей для построения АСУ ТП 1У372.
Таблица 2.6 Сводный перечень
сигналов ввода/вывода АСУТП
|
Тип
канала ввода/вывода
|
Требуется
|
|
Аналоговый
вход 4-20мА
|
86
|
|
Аналоговый
выход 4-20мА
|
24
|
|
Дискретный
вход =24В
|
40
|
|
Дискретный
выход
|
24
|
Таблица 2.7 - Модули FBM АСУТП 1У372
|
Модули
ввода/вывода, модель
|
Функция
|
Кол-во,
шт
|
Общее
количество входов
|
Количество
используемых входов
|
Резерв
абс. / отн
|
|
FBM211
|
AI
|
7
|
112
|
86
|
26/
30%
|
|
FBM237
|
AO
|
4
|
32
|
24
|
8
/ 33%
|
|
FBM217
|
DI
|
2
|
64
|
42
|
22
/ 52%
|
|
FBM242
|
DO
|
2
|
32
|
24
|
8
/ 33%
|
- модуль системных интеграторов полевых
устройств (FDSI), позволяет интегрировать протоколы полевых устройств сторонних
поставщиков в систему I/A Series. Модуль FBM233 имеет один медный разъем
(RJ-45) 10/100 Мб/сек Ethernet. Протокол соответствует стандарту 802.3 IEEE
(поддерживает TCP/IP). Модуль FBM233 обеспечивает двойное соединение Ethernet
(рисунок 2.8) с двухпортовыми полевыми устройствами/сетями.
Для подключения нескольких устройств к FBM233
требуется использование концентратора Ethernet или коммутатора Ethernet.
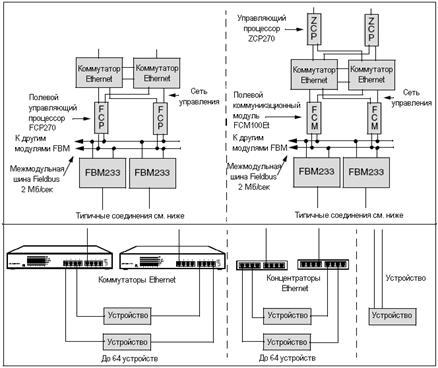
Рисунок 2.8 - Модуль FBM233 в типичных сетевых
конфигурациях
Физически модуль FBM233 устанавливается на
базовую плату вместе с другими модулями, монтируемыми на рейку DIN представляет
собой резервированную версию. Он должен иметь еще один модуль FBM233 в
следующем слоте базовой платы. Для него не требуется клеммная сборка (ТА). Пара
модулей обеспечивает резервирование на уровне модулей Fieldbus (FBM) (см.
рисунок 2.9). В данной конфигурации, один модуль FBM233 является ведущим
(Master), а другой - ведомым модулем (Tracker). Входные точки на управляющей
станции обновляются от входных сигналов устройства, принимаемых в сети,
подключенной к ведущему устройству. Выходные точки устройства записываются как
ведущим, так и ведомым модулями. Переключение ролей выполняется автоматически
при обнаружении фактических проблем.
Модуль FBM233 с использованием дополнительного
драйвера позволяет интегрировать протоколы Tricon/Trident (TSAA) (Ethernet) в
систему I/A Series.

Рисунок 2.9 - Модуль FBM233, монтируемый на
рейку DIN
.1.4 Модульные базовые платы
Модульные базовые платы серии P0926 (рисунок
2.10), монтируемые на рейку DIN, используются для монтажа полевых управляющих
процессоров FCP270, модулей Fieldbus (FBM) и коммуникационных модулей Fieldbus
(FCM). Модульные базовые платы обеспечивают различное количество позиций для
монтажа модулей, которые можно увеличивать на 2, 4 или 8 модулей. Модульные
базовые платы обеспечивают гибкость монтажа, позволяя устанавливать подсистему,
монтируемую на рейку DIN, в разнообразных местах. На базовых платах размещаются
модули FCP, FCM, FBM, комбинация модулей FCP и FBM, или комбинация модулей FBM
и FCM. Модули FCP, FBM и FCM вставляются в базовую плату с помощью своих двух
разъемов, и каждый закрепляется на месте с помощью двух винтов с шестигранной
головкой. Базовые платы также обеспечивают необходимые разъемы для
резервированного питания, резервированной межмодульной шины Fieldbus,
стробирующего импульса и кабелей сигналов ввода/вывода.


Рисунок 2.10 - Модульные базовые платы
(слева - монтируемые на вертикальную рейку DIN,
справа - на горизонтальную)
Все модульные базовые платы поставляются для
двух основных конфигураций монтажа - монтаж на вертикальную рейку DIN или
монтаж на горизонтальную рейку DIN. Каждая из этих конфигураций монтажа может
быть использована внутри или снаружи шкафа.
Базовые платы различных размеров позволяют
наращивать существующие системы или создавать экономичные небольшие системы.
Использование этих базовых плат позволяет устанавливать управляющий процессор
(FCP270) внутри того же шкафа, что и другие модули Fieldbus.
Все соединения между базовыми платами для
межмодульной шины Fieldbus A/B выполняются экранированными кабелями типа витая
пара, чтобы исключить воздействие шума, для соединений между модульными
базовыми платами, кабели могут иметь следующие длины: 0,25м, 1м, 3м, 5м, 10м,
20м, 30м и 60м.
Межмодульные шины Fieldbus могут использовать
резервированные кабели. Чтобы использовать резервированную межмодульную шину
Fieldbus, на каждой базовой плате используется разветвитель/терминатор
межмодульной шины Fieldbus A/B для разветвления межмодульной шины Fieldbus.
Для обеспечения необходимого количества
посадочных мест модулей ввода/вывода АСУ ТП 1У372, в соответствии с таблицей
2.7, необходимо смонтировать две платы P0926JM на 8 позиций и одну плату
P0926HZ на 4 позиции для FCP270 и системных интеграторов FBM233.
.1.5 Сеть управления MESH
Сеть управления Mesh представляет собой
коммутируемую сеть Fast Ethernet, основанную на стандартах IEEE 802.3u (Fast
Ethernet) и IEEE 802.3z (Gigabit Ethernet). Сеть управления Mesh состоит из
ряда коммутаторов Ethernet, соединенных в сеточную конфигурацию.
Архитектура сети управления Mesh интегрирует
мощные станции управления и рабочие станции в сеть 100Мб/1 Гб. Эти станции
управления, рабочие станции и сети образуют масштабируемые системы для
мониторинга технологических процессов, управления технологическими процессами и
интеграции с информационными промышленными системами.
Сеть управления Mesh обеспечивает:
масштабируемость системы путем подключения
коммутаторов Ethernet, каждый из которых имеет 8, 16, 24 или более портов, для
соединения различных станций в линейную, кольцевую, звездообразную или
обращенную древовидную сетевую топологию;
коммутаторы Ethernet, соединенные в ячеистую
конфигурацию;
поддержка Fast Ethernet (100Мбит) и Gigabit
Ethernet (1000Мбит), (только для пересылки на верхний уровень);
модульные каналы выгрузки данных с
высокоскоростными магистралями сети с использованием стандартов 1 Гб
1000Base-T, 1000Base-SX и 1000Base-LX;
работа в дуплексном режиме, основанная на стандартах
IEEE 802.3;
высокоскоростной протокол остовного дерева (RSTP
- IEEE 802.1w), который управляет резервированными путями, предотвращает циклы
и обеспечивает высокую скорость сходимости для сети;
управление сетью и конфигурирование через
локальный порт для управляемых коммутаторов;
программу системного управления (System
Management) для мониторинга за состоянием работоспособности системы управления
и управления оборудованием системы;
программное обеспечение на каждой станции,
которое управляет резервированными портами Ethernet в ответ на отказы сети;
высокоскоростной отклик на неисправности сети и
станций для обеспечения высоконадежной отказоустойчивой сети.
Сеть управления Mesh спроектирована для
обеспечения многочисленных каналов связи между любыми двумя устройствами или
станциями, подключенными к этой сети. Такая архитектура сети обеспечивает очень
высокий коэффициент готовности, при этом уменьшая сложность сети, стоимость и
требования к техническому обслуживанию.
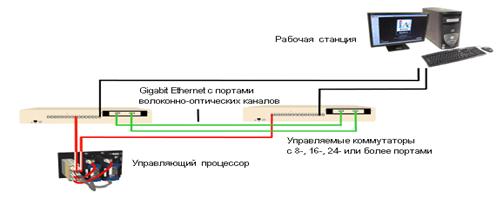
Рисунок 2.11 - Линейная топология сети Mesh
Существует четыре основных топологии для сети
управления Mesh, поддерживаемые системой I/A Series. К ним относятся:
линейная топология, выбранная для построения
сети управления АСУ ТП 1У372 (рисунок 2.11);
кольцо;
звезда;
обращенное (перевернутое) дерево.
Каждая вышеперечисленная топология имеет
уникальные характеристики, и выбор топологии для конкретной сети зависит от
конкретных требований объекта или установки.
Коммутатор является активным многопортовым
сетевым и мостовым устройством, которое обеспечивает отдельный коллизионный
домен для каждого порта и использует уровень протокола управления доступом к
среде передачи
(MAC) для направления сетевых пакетов на
соответствующую станцию или коммутатор. Это позволяет осуществлять
одновременные связи между сетевыми устройствами, подключенными к коммутатору.
Сеть управления Mesh использует стандартные
серийно выпускаемые коммутаторы Ethernet, что позволяет вам сконфигурировать
систему, удовлетворяющую функциональным требованиям объекта управления. Эти
коммутаторы были протестированы и одобрены компанией Invensys для использования
с продуктами системы I/A Series. Были одобрены следующие коммутаторы Ethernet:
-портовый медный управляемый коммутатор
(P0972MF) c встроенным 100 Мб многомодовым волоконно-оптическим (MMF) каналом
выгрузки данных;
-портовый медный управляемый коммутатор
(P0972MG) c встроенным 100 Мб одномодовым волоконно-оптическим (SMF) каналом
выгрузки данных;
-портовый (8 медных и 8 волоконно-оптических
портов) управляемый коммутатор (P0972WG) c двумя факультативными
волоконно-оптическими 1 Гб каналами выгрузки данных;
-портовый управляемый волоконно-оптический
коммутатор (P0972YC) c максимум двумя факультативными волоконно-оптическими 1
Гб каналами выгрузки данных;
-портовый управляемый медный коммутатор
(P0972WP) c максимум двумя факультативными медными или волоконно-оптическими 1
Гб каналами выгрузки данных;
управляемый коммутатор на шасси c максимум 336
портами или до 42 медными или волоконно-оптическими 1 Гб каналами выгрузки
данных.
Для построения масштабируемой автоматизированной
системы управления технологическими процессами 1У372 и обеспечения интеграции с
информационными промышленными системами выбран 16-портовый управляемый
коммутатор P0972WG

Рисунок 2.12 - 16-портовый коммутатор P0972WG
Управляемый коммутатор (P0972WG) обеспечивает
восемь портов 100Base-FX MMF, восемь портов RJ-45 10/100 Мб/сек и два
факультативных волоконно-оптических 1 Гб канала выгрузки данных. Порты выгрузки
данных совместимы с интерфейсами волоконно-оптических портов 1000Base и портов
типа витая пара 1000Base, в зависимости от выбранных факультативных съемных
модулей. Восемь волоконно-оптических портов 100Base-FX имеют разъемы MT-RJ c
максимальным рабочим расстоянием 2 км при работе в дуплексном режиме. Восемь
портов типа витая пара 10/100Base-TX имеют разъемы RJ-45 с максимальным рабочим
расстоянием 100 м.
Быстродействующая коммутация всех портов и
ведущие в отрасли характеристики позволяют интегрировать данный коммутатор в
небольшие сети, а также позволяют использовать его в качестве идеального
краевого коммутатора в больших сетях управления.
Соответствие стандартам IEEE 802.1w и 802.3
обеспечивает совместимость с другими стандартными сетевыми продуктами.
Технология зеркального отражения порта позволяет переадресовать локальный
сетевой трафик на внешний зонд для подробного анализа.
Монтаж в 19-ти дюймовой стойке, настольный
монтаж или монтаж на полку.
2.1.6 Система ПАЗ Trident
Тrident - это новейшая отказоустойчивая система
управления, основанная на архитектуре с тройным модульным резервированием
(Тriр1е-Моdu1аг Redundant, ТМR). ТМR использует три изолированные параллельные
системы управления и экстенсивную диагностику, объединенные в единую систему.
Система, использует принцип мажоритарной выборки “два - из трех”,чтобы
обеспечить высокую надежность, безошибочность и беcперебойное функционирование.
Контроллер Trident использует три идентичных канала. Каждый канал независимо обрабатывает
сигналы, в параллель с двумя другими. Специальные схемы и программное
обеспечение мажоритарной выборки квалифицирует и проверяет все входные и
выходные сигналы, поступающие с объекта управления. Аналоговые входные сигналы
селектируются по принципу выбора среднего значения. Поскольку каналы
изолированы друг от друга, никакая неисправность в любом из каналов не может
повлиять на другие каналы. Если в одном из каналов появляется неисправность,
другие каналы заменяют его. Таким образом, неисправный модуль можно легко
заменить, не отключая контроллер и не останавливая технологический процесс. очистка газ абсорбционный анализатор


Установка и подключение системы Trident
облегчается тем, что хотя в ней и используется тройное резервирование, с точки
зрения пользователя она действует как единая система управления.
Особенности контроллера Trident, обеспечивающие
высочайшую надежность системы:
Способность работать в тяжелых условиях
окружающей среды, существующих на промышленных предприятиях.
Поддерживает до 14 модулей ввода/вывода.
Модули ввода/вывода с горячим резервированием.
Возможность установки и замены модулей на
работающем контроллере, без прерывания процесса управления и нарушения
подключений полевых кабелей.
Система Тrident содержит три главных процессора
для управления тремя каналами системы. Каждый процессор контролирует отдельный
канал и работает в параллель с двумя другими процессорами. Специальный
коммуникационный процессор (IOP) в каждом главном процессоре управляет обменом
данными между главным процессором и модулями ввода/вывода. Тройная шина
ввода/вывода, находящаяся на монтажных платах переходит с одной линейки модулей
ввода/вывода на другую через кабели шины ввода/вывода. IOP процессор,
управляющий вводом/выводом, опрашивает входные модули и передает новые входные
данные в главные процессоры. Главные процессоры организуют входные данные в
виде таблиц, которые хранятся в памяти для использования в процедуре
мажоритарной выборки. Индивидуальная таблица входных данных каждого главного
процессора передается соседнему главному процессору через шину TriBus. После
этого производится мажоритарная выборка. TriBus использует программируемое
устройство с прямым доступом к памяти для синхронизации, передачи и сравнения
данных трех главных процессоров.
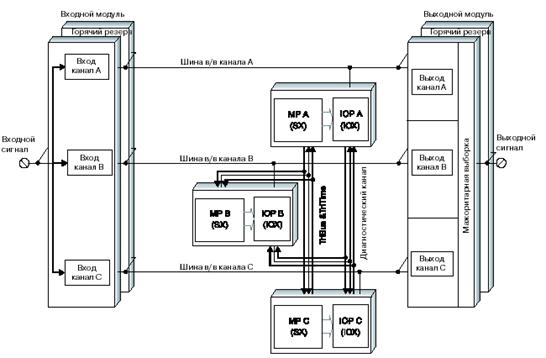
Модуль главного процессора модели 3101.
Система Trident с минимальной конфигурацией
содержит одну монтажную плату МР(2101), на которой находится три главных
процессора (МР). Каждый модуль МР действует как один канал системы Trident.
Модуль МР состоит из процессоров, которые выполняют следующие встроенные программы:
• Прикладной процессор и системная управляющая
программа (SX).
• Процессор ввода/вывода и управляющая программа
ввода/вывода (IOX).
Технические характеристики модуля главного
процессора
Прикладной процессор:
Процессор SX - Motorola MPC860, 32-разрядный, 50
МГц.
Флэш-память PROM (Программируемое ПЗУ) - 6 МБ,
используется для хранения SX, IOX и прикладной программы управления.
DRAM (Динамическое ОЗУ) - 16МБ, используется для
управляющей
программы SX и данных последовательности событий
(SOE).
NVRAM (Энергонезависимое ОЗУ) - 8КБ,
используется для сохраняемых переменных.
Батарея ½ АА
литиевая, расчетный срок службы - 15 лет.
Процессор ввода/вывода:
Процессор IOX - Motorola MPC860, 32-разрядный,
50 МГц.
DRAM (Динамическое ОЗУ) - 16МБ, используется для
управляющей программы IOX.
Совместно используемая память - 128КБ,
используется для осуществления связи с SX.
Шина TriBus, находится на монтажной плате
главного процессора и состоит из трех независимых последовательных линий со
скоростью передачи данных 25мегабит в секунду. Главные процессоры
синхронизируются в начале каждого цикла опроса, затем каждый процессор
пересылает свои данные соседним процессорам. После этого TriBus выполняет
следующие действия:
передает входные данные, диагностическую
информацию и коммуникационные данные;
сравнивает данные и выявляет несоотвествия между
выходными данными и данными предыдущегоцикла опроса, хранящимися в оперативной
памяти программы управления.
Важной особенностью архитектуры системы Trident
является использование одного и того же передатчика для передачи данных
предыдущему и последующему главному процессорам. Это гарантирует, что
процессоры получат одни и те же данные. Каждая линейка модулей должна иметь
отдельное подключение к источнику питания. Подключение полевых сигналов к
каждой монтажной плате осуществляется индивидуально. Передача полевых сигналов
к или от каждого из входных модулей осуществляется через соответствующее
терминальное устройство на монтажной плате. Два слота для модулей ввода/вывода
на монтажной плате связаны как один логический слот. В любом из двух слотов
может стоять активный или резервный модуль ввода/вывода. При подключении
полевых цепей к монтажной плате сигнал поступает как на активный, так и на
пассивный модули ввода/вывода. Следовательно, на оба модуля поступает одна и та
же информация. Тройная шина ввода/вывода между модулями ввода/вывода и главными
процессорами передает данные со cкоростью 2 мегабита в секунду.
Каждая линейка обычно содержит не более восьми
монтажных плат из-за ограничения обоих габаритов по вертикали. Питание к
модулям в линейках подводится с помощью двух независимых шин питания. Каждая
линейка модулей ввода/вывода получает питание от обеих шин питания через
резервированные преобразователи постоянного тока (DC/DC). Соответственно и
каждый канал запитывается независимо от этих резервированных источников. В
модулях ввода/вывода питание полевых цепей и питание модулей изолированы друг
от друга.
Коммуникационный модуль 3201. Используются
одиночная или резервированная конфигурация, без тройного резервирования (TMR).
Коммуникационный модуль (СМ) является факультативным интерфейсом три-к-одному с
главными процессорами. Используя различные методы связи, протоколы и типы
физических сред, коммуникационный модуль позволяет осуществлять связь с:
внешними хост-компьютерами;
распределенными системами управления (DCS);
открытыми сетями;
сетевыми принтерами;
другими системами Trident;
системами Tricon V9.
Один контроллер Trident поддерживает до двух
коммуникационных модулей на монтажной плате СМ (Коммуникационная монтажная
плата 2201). Каждый коммуникационный модуль (СМ) обеспечивает следующие
возможности связи:
Три последовательных порта с оптической
изоляцией RS-232/485, которые конфигурируются пользователем для двухточечныхили
многоточечных (сетевых) соединений Modbus.
Два сетевых порта:
один порт 10Мб Ethernet с двумя разъемами
10BaseT, интерфейс AUI для 10Мб устройства подключения к среде (MAU).
один порт 100Мб Ethernet с двумя разъемами
100BaseTХ, интерфейс,
независящий от среды, для 100Мб MAU.
Поддержка протоколов:
Мodbus ведущий или Modbus ведомый на
последовательных портах.
сетевые протоколы TCP/IP, TSAA и TriStation на
обоих сетевых портах для SOE, Wonderware HMI и других TSAA- или DDE-совместимых
прикладных программ.
протокол сетевого принтера JetDirect Network
Printer Server DLC/LLC на обоих сетевых портах.
одноранговая связь Triconex в рамках нескольких
систем Trident или комбинации систем Trident и Tricon.
временная синхронизация сетевых портов в рамках
нескольких систем Trident или комбинации систем Trident и Tricon.
Модуль аналогового ввода 4-20мА 3351 (AI).
Устанавливается на монтажную плату аналогового ввода 2351. Измерение до 32
входных сигналов. В модуле аналогового ввода (AI) каждый канал измеряет входной
сигнал асинхронно и заносит результаты измерений в таблицу. Каждая из таблиц
входных значений через шину ввода/вывода передается в соответствующий главный
процессор. Из главного процессора эта таблица передается соседним процессорам
по шине TriBus. В режиме TMR программа управления использует среднее из трех
значений. В дуплексном режиме используется среднее арифметическое двух
значений. Все AI модули непрерывно диагностируются. Каждый AI модуль
гарантированно сохраняет калибровку в течение всей жизни контроллера. Никакой
периодической ручной калибровки модулей не требуется.
Модуль цифрового ввода 3301 (DI). До 32 точек
подключения. Устанавливается на монтажную плату цифрового ввода 2301. Модуль
цифрового ввода (DI) содержит три идентичных канала (А, В и С). Хотя каналы
размещены в одном модуле, они полностью изолированы друг от друга и
функционируют независимо. Каждый канал обрабатывает сигналы независимо. Ошибка,
возникшая в одном из каналов, не влияет на другие каналы. В каждом канале
имеется собственный спецпроцессор (ASIC), который обеспечивает коммуникацию с
соответствующим главным процессором, а также динамическую диагностику. Каждый
из трех входных каналов модуля DI асинхронно измеряет входные сигналы,
определяет их относительные состояния и помещает их значения в таблицы входных
значений А, В и С соответственно. Каждая из этих таблиц через определенные
интервалы времени считывается через шину ввода/вывода коммуникационным
процессором соответствующего главного процессора. Например, главный процессор А
опрашивает таблицу входных значений А через шину ввода/вывода А. В модулях DI
непрерывно выполняется диагностика по предельным значениям (Forced Value
Diagnostics - FVD). Процедура диагностики DI модулей разработана специально для
контроля устройств, сигнал которых сохраняет одно и то же состояние в течение
длительного времени. Диагностика гарантирует выявление неисправностей каждой
входной цепи, даже если состояние входного сигнала никогда не изменяется.
Модуль цифрового вывода 3401 (DO) . До 16 точек
подключения. Устанавливается на монтажную плату цифрового вывода. В каждом
канале модуля DO имеется собственный спецпроцессор (ASIC), который принимает
таблицу выходных значений от коммуникационного процессора ввода/вывода (IOP)
соответствующего главного процессора. В модулях DO используется патентованная
четырехвариантная схема мажоритарной выборки (QuadVoter) для выбора одного
индивидуального сигнала, который затем подается на выходную нагрузку. Эта схема
выборки основана на параллельно-последовательных цепях, которые пропускают сигнал
если два из трех каналов (А и В или В и С, или А и С) выдают им команду на
замыкание. Четырехвариантная схема выборки имеет многократное резервирование
всех критических путей прохождения сигналов, гарантируя тем самым безопасность
и максимальную готовность. В процессе выполнения диагностики схемы выборки
выходных сигналов (Оutput Voter Diagnostics - OVD) состояние каждой точки
кратковременно фиксируется на одном из выходных драйверов, последовательно,
одна за другой. Цепи обратной связи обратной связи в модуле позволяют каждому
микропроцессору считывать выходные значения для точки, чтобы определить
присутствие скрытой неисправности или ошибки в выходной цепи. Прерывания
выходного сигнала при диагностике OVD не превышают 2 миллисекунд и они не
влияют на большинство полевых устройств. Для устройств, не допускающих любых
прерываний сигнала, OVD можно выборочно заблокировать при программировании
системы с помощью TriStation. Диагностика модулей DO разработана специально для
контроля выходов, которые сохраняют неизменное состояние в течение длительных
периодов времени. Диагностика OVD гарантирует полный контроль отказов каждой
выходной цепи, даже если реальное состояние этого выхода никогда не меняется.
В соответствии со сводным перечнем сигналов
ввода/вывода системы противоаварийной защиты (таблица 2.6) и с учетом
обеспечения резерва в таблице 2.9 представлены типы и количество модулей
Trident .
Таблица 2.8 Сводный перечень сигналов
ввода/вывода системы ПАЗ
|
Тип
канала ввода/вывода
|
Требуется
|
|
Аналоговый
вход 4-20мА
|
16
|
|
Аналоговый
выход 4-20мА
|
-
|
|
Дискретный
вход =24В
|
48
|
|
Дискретный
выход
|
34
|
Таблица 2.9 - модули ввода/вывода системы ПАЗ
1У372
|
Модули
ввода/вывода, модель
|
Функция
|
Кол-во,
шт
|
Общее
количество входов
|
Количество
используемых входов
|
Резерв
абс. / отн
|
|
3351
|
AI
|
1
|
32
|
16
|
16/
100%
|
|
3301
|
DI
|
2
|
64
|
16
/ 33%
|
|
3401
|
DO
|
3
|
48
|
34
|
14
/ 41%
|
.1.7 Барьеры искробезопасности HID 2000 Elcon
Instruments и терминальные панели дискретных выходов2026 - повторитель
источника питания, совместимый с интеллектуальными датчиками, обеспечивает
полностью изолированный от земли источник питания для 2-х проводных датчиков в
опасной зоне, повторяет токовый сигнал от датчика на нагрузке в безопасной
зоне. Также обеспечивает двухстороннюю коммуникацию для интеллектуальных
датчиков, которые используют модуляцию тока для передачи данных и модуляцию
напряжения для приема данных.

Выходы изолированы от входов и соединены с общим
(минусовым) проводом источника питания.
Потребляемый ток: 50 мА при 24 В и выходном
сигнале 20 мА (на канал).
Сигнал опасной зоны (вход): диапазон входного
сигнала: 4-20 мА (перегрузка ограничена 26 мА). Напряжение, подаваемое на
датчик и линию: 15.5 В мин. при токе 20 мА (уровень переменной составляющей 10
мВ эфф.).
Сигнал безопасной зоны (выход): выбирается
пользователем: 4-20 мА или 1-5 В (на внутреннем шунте 250 Ом). Уровень
переменной составляющей: 10 мВ эфф. на нагрузке 250 Ом, необходимой для
передачи данных. Нагрузка: 0-650 Ом.
Частотная характеристика коммуникационного
канала: (от датчика к выходу и от выхода к датчику) 0.5 кГц - 40 кГц в пределах
3 дБ (-6 дБ на 100 кГц).
Пригоден для использования с интеллектуальными
датчиками, использующими HART® или подобный протокол. Время реакции: 40 мсек,
при скачке уровня сигнала с 10 % до 90 %.2824 - повторитель состояния
контактного датчика/проксимитора, с релейным выходом, повторяет состояние
«сухого» контакта или искробезопасного проксимитора, находящихся в опасной
зоне, на релейном выходе(ах) в безопасной зоне.
Система обнаружения неисправностей линии
(используется в основном с проксимиторами) обесточивает выходное реле (реле
индикации статуса выходов и реле аварийной сигнализации в HiD 2821), включает
светодиодный индикатор аварии и выдает сигнал на шину аварийной сигнализации
объединительной платы. Система обнаружения может использоваться и с контактными
датчиками. В этом случае к датчику подключается дополнительная цепь, состоящая
из параллельного и последовательного резисторов.
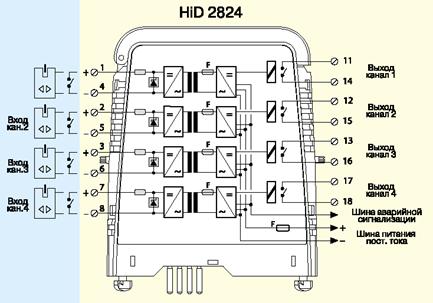
Потребляемый ток: 15 мА при 24 В и включенном
выходном реле (на канал).
Сигнал опасной зоны (вход): «Сухой» контакт или
проксимитор, соответствующий стандарту DIN 19234(NAMUR).
Пороговые величины:
От 0 до 0.2 мА = обрыв линии (отказ
проксимитора).
От 6.5 мА до макс. мА= короткое замыкание линии
(отказ проксимитора).
От 0.2 до 1.2 мА= контакт разомкнут/ проксимитор
с объектом.
От 2.1 до 6.5 мА= контакт замкнут/ проксимитор
без объекта.
Сигнал безопасной зоны (выход): DPST
(двухполюсное реле на одно положение) на канал (2822). SPST (однополюсное реле
на одно положение) на канал (2824). DPST на каждый выход статуса (2821).
Нормально включенное реле DPST на аварийном
выходе, с одним нормально разомкнутым и одним нормально замкнутым контактами
(2821). Максимальная нагрузка контактов: 50 В пост., ток 0.5 А, неиндуктивная
нагрузка. Время реакции: 20 мсек. Выбирается переключателями: Реле нормально
включено/ нормально выключено (фаза). Система обнаружения повреждений линии
включена/выключена.2034 - драйвер ЭПП, с питанием от сигнального контура,
передает сигнал 4-20 мА, поступающий из безопасной зоны от управляющей системы,
в опасную зону для управления находящимися там ЭПП, электроприводами клапанов и
дисплеями.
Разработан для применений, требующих высокой
надежности. Каждый канал питается от сигнального контура с низким падением
напряжения, и позволяет системе управления контролировать состояние линии.
Разомкнутый полевой контур представляет собой высокое входное сопротивление на
входе управляющего устройства, это используется в качестве признака аварии.

Потребляемый ток: 35 мА при 24 В и выходном
сигнале 20 (на канал).
Сигнал опасной зоны (выход): 4-20 мА на нагрузке
от 0 до 500 Ом макс, влияние нагрузки: <0.2 % от полной шкалы при изменении
нагрузки от 0 до 500 Ом, переменная составляющая выходного сигнала: 40 мкА
пик-пик, время реакции: 50 мсек при скачке уровня сигнала с 10 до 90 %.
Сигнал безопасной зоны (вход): Питание от
сигнального контура, от 7 до 30 В макс. (защита от неправильного включения
полярности). Входной ток: питание от сигнального контура, 4-20 мА (падение
напряжения 7 В при токе 20 мА и нагрузке 500 Ом). Потребление при разомкнутой
цепи < 0.8 мА при 24 В. NG - терминальная панель дискретных выходов модуля FBM242.
Данная терминальная панель содержит 16 встроенных реле обеспечивающих выдачу
выходного сигнала 30В пост.т. при 5А или 125В пост.т. при 600мА с резистивной
нагрузкой, или 125В пост.т. при 250мА с индуктивной нагрузкой, или 120В
перем.тока при 5А или 120В перем. тока при 5А, или 240В перем.т. при 5А
(внешний источник) с источником напряжения, подаваемым в контур . Терминальные
панели, используемые с модулем FBM242 обеспечивают: точки подключения выходных
сигналов, точку подключения внешнего питания.
.1.7 Блоки питания АСУ ТП 1У372
Блок питания фирмы Foxboro (FPS400-24) -
сертифицированный блок питания фирмы Foxboro (см. рис.3-1), монтируемый на
рейку DIN, имеет следующие характеристики: 400Вт, 24В постоянного тока,
предназначен для установки в зоне со степенью 2 (номер P0917LY). Этикетка
удобна расположена на лицевой стороне блока питания, и на ней можно указавать
тип питания блока питания: Primary (Первичный) или Secondary (Вторичный).

Рисунок 2.18 - Блок питания оборудования базовых
плат.
Для обеспечения гарантированного питания базовых
плат (Base plate), на которых располагаются модули ввода/вывода (FBM) и
контроллеры подсистем АСУ ТП и ПАЗ выбраны 4 блока питания P0917LY. Блоки
питания монтируется на рейку DIN
Резервированный источник питания P0972XЕ
16-портового волоконно-оптического коммутатора
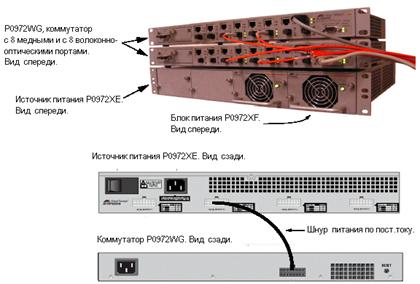
Рисунок 2.19 - Резервированный источник питания
P0972XЕ 16-портового волоконно-оптического коммутатора
Резервированный источник питания (P0972XE) может
обеспечивает резервированное питание максимум четырех 16-портовых (с 8 медными
и 8 волоконно-оптическими портами) управляемых коммутаторов (P0972WG). Он
обеспечивает внешнее питание для коммутатора(ов), если первичный (внутренний)
источник питания выйдет из строя. Первоначально он содержит один заранее
установленный модуль питания. Каждый модуль питания (P0972XF) может
поддерживать один коммутатор. Три дополнительных модуля питания могут быть
установлены на шасси одного резервированного источника питания (P0972XE). -
отказоустойчивый источник питания барьеров искрозащиты.
Напряжение =24 В, ток 36 А или 30 А при одном
резервном модуле.
Резервирование по входным линиям, резервирование
силовых модулей и вентиляторов охлаждения.
Возможность замены модулей «на ходу», без
отключения питания.
Полный контроль всех критичных параметров.

Блок, монтируемый в стойку или на панель,
шириной 19 дюймов (483 мм) и высотой 4 U (176.6 мм) с встроенными вентиляторами
охлаждения. Три варианта выходных клемм, 2 входных линейных модуля (1550/LM) и
до 6 силовых модулей (1550/РМ), на ток 6 А каждый.
Для шкафов подсистем АСУ ТП и ПАЗ выбраны два
источника питания барьеров искрозащиты PS1550 с четырьмя силовыми модулями
каждый.
.1.7 Рабочие станции
Прикладная рабочая станция (АР) выполняет
интенсивные вычисления функции. Она обладает вычислительными возможностями,
чтобы выполнять:
системное программное обеспечение, написанное
фирмой Foxboro;
прикладные программные пакеты, написанные фирмой
Foxboro;
программы, написанные пользователем, и программы
сторонних поставщиков.
Кроме того, станция АР выступает в роли
файлового сервера или хоста (ведущего компьютера) для других станций в сети.
Файловый сервер обеспечивает сервис загрузки образа для этих станций и хранит
информацию, полученную от этих станций, чтобы её можно было использовать в
других прикладных программах.
Станция оператора (WР) - это графический
терминал, с помощью которого оператор взаимодействует с дисплеями системы (I/A)
Series, чтобы:
выполнять мониторинг и управление параметрами
технологического процесса;
принимать уведомления об аварийных сигналах
технологического процесса;
выполнять действия с аварийными сигналами
технологического процесса;
выполнять мониторинг состояния аппаратных
средств системы;
отображать заархивированные данные
технологического процесса.
Монитор станции оператора (WР) используют для
взаимодействия с дисплеями системы (I/A) Series, чтобы работать с некоторыми
конфигураторами системы (I/A) Series, создавать и выполнять программы и отчёты.
Станция оператора (WР) также обеспечивает функции накопителей данных большой
ёмкости для хранения графических дисплеев и других файлов рабочей станции.
Основная функция станции оператора (WР) состоит
в выполнении роли интерфейса между пользователем и технологическим процессом,
обеспечивая программы, необходимые для работы с устройствами пользовательского
интерфейса.
Инженерная рабочая станция (AW) является
комбинацией прикладной рабочей станции (АР) и станции оператора (WР). Поэтому
она может выполнять такие функции прикладной рабочей станции, как сбор данных
предыстории и загрузку базы данных управления. Она также действует как
графический интерфейс, аналогично станции оператора. Доступ ко всем
конфигураторам возможен через эту станцию. Существуют различные версии
инженерных рабочих станций, одна версия использует операционную систему SUN, а
другая версия использует операционную систему Windows. Последней является
инженерная рабочая станция АW-70, являющейся автономной станцией, которая
моделирует станцию АW в сети. С помощью этой станции всё конфигурирование может
быть выполнено и протестировано в автономном режиме.
.1.8 Полевое оборудование КИП
Выключатель путевой типа ВПВ-1А21
предназначенный для сигнализации конечного положения исполнительного механизма
и используемый в цепях переменного или постоянного тока. Коммутационное
устройство выключателя имеет «механическо-мгновенное действие», обеспечивающее
включение или переключение контактов, а также контактное давление не зависящее
от положения привода.
Условия эксплуатации:
климатическое исполнение УХЛ-1 по ГОСТ 15150-69;
степень защиты IP-65;
взрывозащищённого исполнения 1ExdIAT6;
рабочие значения температуры воздуха от -50 °С
до +45 °С;
относительная влажность окружающей среды до 100
% при температуре 35 °С с конденсацией влаги.
Коррозионностойкие датчики давления
"Метран-49" код МП1
Датчики давления Метран 49 МП1 (рисунок 2.22)
предназначены для работы в системах автоматического контроля, регулирования,
управления технологическими процессами и обеспечивают непрерывное
преобразование значения измеряемого параметра в унифицированный токовый
выходной сигнал.
Рисунок 2.21. - Внешний вид датчика давления
Метран 49
Датчики работают со вторичной регистрирующей и
показывающей аппаратурой, регуляторами и другими устройствами автоматики,
машинами централизованного контроля и системами управления, работающими от
стандартного выходного сигнала.
В датчиках давления "Метран-49" за
счет реализации схемы трехмембранного приемника давления достигнуто сочетание
высокой точности и стабильности измерений с высокой коррозионной стойкостью.
Измеряемые среды: агрессивные среды с высокой
химической активностью (газ с содержанием сероводорода, кислоты, щелочи,
нефтепродукты, сырая нефть, морская вода), исполнения: обыкновенное,
взрывозащищенное Ех, Вн, выходной сигнал: 0-5, 0-20, 4-20, 5-0, 20-0, 20-4 мА,
степень защиты датчиков от воздействия пыли и воды IP65, внесены в Госреестр
средств измерений под №19396-00, сертификат №7633/1.
Средняя наработка на отказ 100000 часов.
Датчики разработаны по техническому заданию ОАО
"Газпром".
По заказу поставляются в исполнении по
материалам для рабочей среды содержащей водород (Оренбургское и Астраханское
месторождения).
Датчики-реле уровня РОС 101И предназначены для
контроля уровня электропроводных и неэлектропроводных жидкостей, твердых сред,
нефтепродуктов, сжиженных углеводородных газов. Относятся к классу емкостных
сигнализаторов уровня. Принцип действия основан на высокоточном методе преобразования
изменения электрической емкости чувствительного элемента, вызванного изменением
уровня контролируемой среды в «релейный» выходной сигнал.
В состав прибора входит первичный
преобразователь и передающий преобразователь.
Исполнение первичного преобразователя по
маркировке взрывозащиты 0ЕxiaIICT6, передающий преобразователь ЕxiaIIC.
Диапазон температур окружающего воздуха при
эксплуатации от -50 до +60оС.
Питание от сети переменного тока с напряжением
220 ± 15 % В.
Сертификат соответствия № РОСС.RU.ГБ05.В00747.
Разрешение Федеральной службы по экологическому,
техническому и атомному надзору №РРС 04-9163.
Клапан электромагнитный ММММ.306577.001-02
предназначен для обеспечения управления пневматическими исполнительными
механизмами в автоматизированных системах управления технологическими
процессами и машинами взрывоопасных производств. Клапаны предназначены для
работы во взрывоопасных зонах помещений и наружных установок в соответствии с
главой 7.3 ПУЭ, в которых возможно образование газа и паровоздушных смесей
категорий IIA, IIB, IIC, групп T1 - Т6 по ГОСТ 12.1.011.
Технические характеристики:
питание 24 В постоянного тока;
управление работой в сети сжатого воздуха с
давлением до 0.6 МПа;
взрывозащищённого исполнения 1ExdIICT6 по ГОСТ
12.2.020;
рабочие значения температуры воздуха от (-50 до
+40) °С.
Электропневматический позиционер(ЭПП) фирмы
SAMSON (тип 3767)
Позиционеры обеспечивают заданное согласование
положения исполнительного блока и управляющего сигнала. Эти приборы
сопоставляют управляющий сигнал управляющего или регулирующего устройства с
положением исполнительного блока и управляют пневматическим давлением
сервопривода (Pst) в качестве выходной величины.
Эти позиционеры обладают рядом специфических
свойств: любое монтажное положение, возможность использования как в нормальном
режиме. Так и в режиме разделенного диапазона, выгодные динамические
характеристики, пренебрежительно малое влияние вспомогательной энергии,
регулируемый диапазон Р, адаптируемая подача воздуха, малый расход
вспомогательной энергии, особо малое влияние тряски, компактное исполнение, не
требующее больших усилий для техобслуживания.
Исполнение для взрывоопасных производств с
взрывозащитой типа «искробезопасность EEx ia II T6».
Таблица 2.8 - Технические характеристики ЭПП
SAMSON 3767
|
Характеристика
|
Значения
|
|
Диапазон
хода при монтаже согласно DIN IEC 534
|
7,5-150
мм
|
|
Задающая
величина
|
4-20
мА, 0-20 мА, 1-5 мА
|
|
Воздух
питания
|
1,4
-6 бар
|
|
Давление
исполнительного импульса pst (выходной сигнал)
|
0
-6 бар
|
|
Характеристика
|
линейная
|
|
Гистерезис
|
<
0,3 %
|
|
Зона
нечувствительности
|
<
0,1 %
|
|
Направление
действия
|
обратимое
|
|
Пропорциональная
зона
|
0,5
- 2,5 %
|
|
Допустимая
температура окружающей среды
|
-40
+80 °C
|
|
Влияние
вибрации
|
от
10 до 150 Гц и 1,5 и при 4 г влияния нет
|
|
Род
защиты
|
IP
54 (при специальном исполнении IP 65)
|
Термоэлектрический преобразователь Метран ТСПУ
276 - Ех (см. рисунок 2.23). ТСПУ развивает электродвижущую силу при изменении
температуры рабочего спая. Встроенный в голову датчика измерительный
преобразователь преобразует э.д.с. в унифицированный выходной сигнал 4-20 мА,
что дает возможность построения АСУ без применения дополнительных нормирующих
преобразователей.

Рисунок 2.22 - Внешний вид термоэлектриразователей
Метран ТСПУ 276
Внесены в Госреестр средств измерений под
№21968-01, сертификат №10993.
Термопреобразователи ТСПУ-276 Ех могут
эксплуатироваться во взрывоопасных зонах, в которых возможно образование
взрывоопасных смесей газов, паров, горючих жидкостей с воздухом категорий IIA,
IIB и IIC, групп T1- Т6 по ГОСТ 12.1.011.
Модельный ряд термоэлектрических
преобразователей выбранных для построения АСУ ТП 1У372 представлен в приложении
№1.
Сигнализаторы загазованности Monitors модель
2602А - одноканальный контрольный модуль детекции сероводорода. Принцип
действия основан на изменении сопротивления метало-оксидной пленки MOS,
расположенной между двумя электродами полевого датчика при поглощении ее
поверхностью (адсорбции) сероводорода.
Диапазон рабочих температур от (-40 до +60) оС.
Сигнализаторы СТМ10 - предназначены для
непрерывного контроля довзрывоопасных концентраций в воздухе помещений и
открытых пространств горючих газов, паров и их смесей.
Диапазон рабочих температур от (-60 до +50) оС.
Сигнализаторы General Monitors и СТМ10 являются
автоматическими стационарными приборами, состоящими из блока сигнализации и
питания и выносных датчиков.
Блоки сигнализации и питания выполнены в
обыкновенном исполнении по ГОСТ 12997-84 и должны быть установлены за пределами
взрывоопасной зоны.
Датчики газосигнализаторов General Monitors и
СТМ10 выполнены взрывозащищенными с маркировкой iExdIICT4 по ГОСТ 12.2.020-76.
Степень прочности оболочки датчика высокая по ГОСТ 22782.0-81.
Датчики могут эксплуатироваться во взрывоопасных
зонах, в которых возможно образование взрывоопасных смесей газов, паров,
горючих жидкостей с воздухом категорий IIA, IIB и IIC, групп T1- Т4 по ГОСТ
12.1.011.
Питание сигнализаторов от сети переменного тока
с напряжением 220 ± 15 % В.
Средняя наработка на отказ по каждому каналу
сигнализаторов 60000 часов.
.5 Расчет надежности ПТК
.5.1 Методика расчета
Надежность - свойство системы сохранять во
времени в восстановленных пределах значения всех параметров, характеризующих
способность системы выполнять требуемые функции в заданных режимах и условиях
эксплуатации.
Объектом расчета надежности является
автоматизированная система управления технологическими процессами 1У372
Оренбургского ГПЗ.
Оцениваемыми показателями надежности являются:
показатель безотказности;
показатель ремонтопригодности.
Система является восстанавливаемой в процессе
применения.
Неработоспособным состоянием системы считается:
прекращение сбора, обработки, передачи,
представления информации, выход погрешности измерения технологических
параметров за допустимые пределы, искажение информации или не предоставление ее
оперативному персоналу (информационная функция системы);
прекращение формирования или передачи команд
управления, выдача ложных команд (функция управления системы);
отсутствие любой команды управления, формируемой
системой САУ или ПАЗ при наличии аварийной ситуации на объекте управления, либо
выдача любой команды управления при отсутствии аварийной ситуации на объекте
(функция защиты системы).
Показатель ремонтопригодности опущен, т.к. на
восстановление работоспособности АСУ ТП из-за вышедшего из строя элемента
программно-технического комплекса уйдет не больше 0,5 часа.
Для расчета свойств, составляющих надежность, и
комплексных показателей надежности используем структурный метод расчета -
основанный на представлении объекта в виде логической
(структурно-функциональной) схемы (в соответствии с ГОСТ 27.301-95).
Предполагаем, что как вся система, так и любой
ее элемент могут находиться только в одном из двух возможных состояний -
работоспособном и неработоспособном и отказы элементов независимы друг от
друга. Состояние системы определяется состоянием элементов и их сочетанием.
Поэтому теоретически возможно расчет безотказности свести к перебору всех
возможных комбинаций состояний элементов, определению вероятности каждого из
них и сложению вероятностей работоспособных состояний системы.
Системой с последовательным соединением
элементов называется система, в которой отказ любого элемента приводит к отказу
всей системы. Такое соединение элементов в технике встречается наиболее часто,
поэтому его называют основным соединением. Считая отказы элементов
независимыми, вероятность одновременно безотказной работы n элементов
определяется по теореме умножения вероятностей:
|
 .(2.1) .(2.1)
|
|
Очевидно, что даже при высокой надежности
элементов надежность системы при последовательном соединении оказывается тем
более низкой, чем больше число элементов.
Если все элементы системы работают в периоде
нормальной эксплуатации и имеет место простейший поток отказов, наработки
элементов и системы подчиняются экспоненциальному распределению, т.е. можно
записать:
|
 (2.2) (2.2)
|
|
Системой с параллельным соединением элементов
называется система, отказ которой происходит только в случае отказа всех ее
элементов. Такие схемы надежности характерны для систем, в которых элементы
дублируются или резервируются, т.е. параллельное соединение используется как
метод повышения надежности.
2.1.9 Расчет показателей надежности
Для расчета показателей надежности по функциям
выполняемым АСУ ТП исходим из того, что система состоит из последовательно
соединенных элементов (т.е. отказ хотя бы одного из них приводит к отказу всего
соединения в целом).
Для информационной функции интенсивность отказа
системы определяется по формуле:
|
 ,(2.3) ,(2.3)
|
|
где  - интенсивность отказов датчиков,
- интенсивность отказов датчиков, 
 ;
;
 - интенсивность отказов линии
связи,
- интенсивность отказов линии
связи,  ;
;
 - интенсивность отказов УСО,
- интенсивность отказов УСО,  ;
;
 - интенсивность отказов ПЛК,
- интенсивность отказов ПЛК,  ;
;
 - интенсивность отказов АРМ
оператора,
- интенсивность отказов АРМ
оператора,  .
.
 .
.
Следовательно, среднее время
безотказной работы системы:
 года.
года.
Значение коэффициента надежности
определяется по формуле:
|
 .(2.4) .(2.4)
|
|
Т.е. коэффициент надежности для времени в один
год будет:
 .
.
Вероятность безотказной работы в
течении года:
 .
.
Коэффициент готовности системы
определяется по формуле:
|
 ,(2.5) ,(2.5)
|
|
где  - время восстановления элементов
системы,
- время восстановления элементов
системы,  .
.
 .
.
Для управляющей функции
интенсивность отказа системы определяется по формуле:
|
 ,(2.6) ,(2.6)
|
|
где  - интенсивность отказов
исполнительных механизмов, .
- интенсивность отказов
исполнительных механизмов, .
 .
.
Следовательно, среднее время
безотказной работы системы:
 года.
года.
Коэффициент надежности для времени в
один год будет:
 .
.
Вероятность безотказной работы в
течении года:
 .
.
Для функции защиты интенсивность
отказа системы определяется по формуле:
|
 .(2.7) .(2.7)
|
|
 .
.
Следовательно, среднее время
безотказной работы системы:
 лет.
лет.
Коэффициент надежности для времени в
один год будет:
 .
.
Вероятность безотказной работы в
течении года:
 .
.
. Разработка программного
обеспечения
.1 Структура программного
обеспечения
Программное обеспечение (ПО) АСУ ТП
1У372 ГПЗ включает в себя следующие составные части:
Системное ПО - операционная система
Windows XP SP2;
Фирменное ПО - пакет программ «I/A
Series»;
Прикладное ПО - ПО созданное на
основе пакета программ «I/A Series».
Пакет I/A Series включает в свой
состав:- это графический редактор для создания и обслуживания дисплеев
графического отображения динамики управления технологическим процессом. - это
интерфейс пользователя системы серии I/A, то есть интерфейс между вами и
технологическим процессом. FoxView позволяет вызвать другие прикладные
программы;Historian - это прикладная программа с архитектурой клиент/сервер,
которая позволяет выполнять процессы сбора, обработки и хранения данных
предыстории;
Программа FoxCAE представляет
мощную, работающую под Windows ХР систему, которая полностью автоматизирует
процесс разработки баз данных для станций управления системы I/A Series.
Функции частей программного
обеспечения
ПО системы позволяет реализовать
следующие основные функции:
сбор и обработку входных аналоговых
и дискретных параметров, формирование сигналов нарушения технологического
регламента и аварийных ситуаций;
формирование на запоминающем
устройстве архивов параметров;
формирование расчетных параметров;
выдача управляющих воздействий на
исполнительные механизмы и запорную арматуру;
реализация контуров регулирования;
выполнение алгоритмов
противоаварийной защиты и блокировок;
выполнение алгоритмов управления
технологическим процессом;
организация информационного обмена
со станциями операторов, а также другими подсистемами.
Операторский интерфейс интегрирован
в системе управления I/A Series и позволяет выполнять широкий круг операций,
как по конфигурированию системы, так и по управлению процессом.
Конфигурированные функции дают
возможность как начальной настройки рабочей станции на текущую конфигурацию
объекта управления, так и оперативной ее корректировки в режиме «on-line».
К данной группе функций относятся
также формирование архивных копий базы данных станций, восстановление БД при ее
нарушении.
В режиме конфигурирования
осуществляется формирование списков оперативного персонала и определение прав
доступа каждого работника. Дополнительные функции включают в себя функции
начальной загрузки контроллеров.
К функциям интерфейса оператора
относятся:
получение информации о протекании
процессов и состоянии оборудования от управляющих контроллеров I/A Series, либо
от смежных систем управления;
формирование архива исторических
данных;
отображение текущего состояния
технологического процесса и оборудования в виде мнемосхем, диаграмм, таблиц и
т.д. на основе многооконного интерфейса;
отображение исторических трендов
параметров;
формирование команд управления,
изменения установок регуляторов с контролем достоверности вводимой информации;
расчет обобщенных показателей работы
установок и агрегатов;
сигнализации нарушений
технологического регламента и возникновения аварийных ситуаций, введение и
отображение журнала нарушений регламента и событий, произошедших в системе;
прием от подсистем верхнего уровня
иерархии заданий и ограничений по ведению технологического процесса, выдача
информации в подсистемы верхнего уровня и в смежные подсистемы;
обеспечение безопасности путем
контроля прав доступа оператора, а также анализа вводимой информации;
контроль и диагностика
работоспособности программно-технических средств.
В состав фирменного программного
обеспечения входят также инструментальные (сервисные) средства для разработки
отладки и документирования прикладного программного обеспечения, проведения
наладочных работ.
Алгоритмы управления
В процессе функционирования системы
алгоритмы обрабатывают команды оператора, сигналы об изменении технологических
параметров, поступающие от устройств ввода/вывода и выдают управляющие
воздействия на исполнительные механизмы.
Алгоритмы для каждого
исполнительного механизма составлены с учетом их подключения к устройствам
ввода/вывода, подвода питания, а также функциональных задач, реализацию которых
обеспечивает данный исполнительный механизм. При отработке алгоритма
учитываются: возможный запрет по блокировке, время отработки каждой стадии,
появление отказа.
Выдача команд управления на
исполнительные механизмы производится с последующим контролем их выполнения,
для чего запускается таймер на время, отведенное на выполнение команды. Если
подтверждение приходит раньше установленного времени, то команда считается
отработанной. Если после времени задержки подтверждение не пришло, то выдается
сообщение об ошибке.
Согласно РД50-34.698-90, условия,
при которых прекращается решение комплекса задач автоматизированным способом и
оператору необходимо обеспечить безаварийный останов технологического процесса
(возможен также перевод процесса на управление по месту), следующие:
пропадание питания на рабочем месте
оператора-технолога;
обрыв линий связи между
контроллерами и шкафами АСУТП и ПАЗ.
В системе I/A Series используется
модульный принцип при разработке стратегии управления. Управляющие модули
являются уникальными поименованными управляющими единицами в системе I/A
Series. Функциональный блок - это основной компонент управляющего модуля, то
есть, это блок, из которых строится управляющий модуль. Каждый функциональный
блок содержит в себе управляющий алгоритм (такой, как ПИД, Аналоговый Выход или
Аналоговый Вход). Алгоритмы Усовершенствованного Управления процессом также
включены в функциональные блоки, например, регулирование с функцией Нечеткой
логики. Будучи соединенными, вместе в определенной последовательности,
несколько функциональных блоков образуют управляющий модуль.
ПО I/A Series поддерживает несколько
языков управления для разработки конфигураций: функциональные блоки и язык
релейной логики. В пределах одного управляющего модуля можно смешивать эти
управляющие языки.
Функциональный блок представляет
собой конструктивный элемент для создания алгоритмов, выполняющих управление
технологическим процессом или его мониторинг. Каждый функциональный блок
включает в себя алгоритм и параметры, которые позволяют настраивать этот
алгоритм. Алгоритмы функциональных блоков варьируются от простого
преобразования входного сигнала до сложных управляющих стратегий.
Функциональный блок использует
данные параметров, полученные от пользователя, от самого функционального блока
или от других функциональных блоков для выполнения своих вычислительных и
логических функций и для передачи выходного значения в другие функциональные
блоки или в полевые приборы. Некоторые функциональные блоки могут также
определять условия алармов.
Язык релейной логики позволяет
создавать модульные логические схемы управления в удобных, простых для
использования релейных символах. Программы релейной логики определяют простые
релейные операции. Программы релейной логики, вместе с непрерывными и
последовательными блоками управления управляющего процессора, может
использоваться для реализации сложных стратегий управления. На основе функций
обмена данными и наличия сети управления выполнение программ релейной логики в
одном модуле Полевой шины может быть скоординировано с другими логическими,
непрерывными и периодическими функциями в любом сетевом управляющем процессоре.
Алгоритмы контроля и сигнализации
Для отображения сигнализации
параметра состояния на экране станции оператора используется смена цвета:
зеленый - нормальное состояние
параметра или оборудования;
желтый - предупредительная
сигнализация;
красный - аварийная сигнализация.
Отклонения и отключения
сопровождаются на мнемосхеме мигающим светом и дополнительно подачей звукового
сигнала.
Система снабжена алгоритмами
диагностики исправности технических средств системы и устройств, которые она
обслуживает (датчики, исполнительные механизмы и т.д.).
Отображение на экране монитора
контуров регулирования обеспечивает возможность контроля текущего состояния
параметра, уставки и состояния исполнительного механизма, график изменения
параметра во времени, возможность выбора режима работы регулятора
(автоматический/ручной), изменение уставки или состояния исполнительного
механизма.
Отображение на экране монитора
исполнительных механизмов с дискретным управлением (краны, отсечные клапана,
электрозадвижки, насосы и т.д.), обеспечивает возможность контроля текущего
состояния механизмы и управления этим механизмом.
Алгоритмы управления отсекателями.
Алгоритмы предназначены для
управления пневмоприводом отсекателей через пилотный клапан и контроля над их
состоянием (рисунки 2.23 - 2.24).
Для контроля состояния отсекателей
установлены сигнализаторы крайних положений.
Схема управления предусматривает:
два дискретных выходных сигнала
(ОТКРЫТЬ, ЗАКРЫТЬ);
два дискретных входных сигнала
(ОТКРЫТ, ЗАКРЫТ);
команды управления оператора или
алгоритмов управления.
Сигнализация «Превышено время
открытия/закрытия» выдается в случае, если после времени выделенного на
отработку команды состояние отсекателя не соответствует команде алгоритма.
По команде управления - выдается
соответствующий дискретный выходной сигнал и запускается таймер для проверки
реакции крана на команду управления, по размыканию конечных выключателей
текущего состояния. После чего запускается таймер на время полного срабатывания
крана.
Рисунок 2.23 - Алгоритм открытия отсекателя
Рисунок 2.24 - Алгоритм закрытия отсекателя
При появлении сигнала неисправности производится
сброс таймера и вырабатывается сообщение об отказе, с последующим выходом из
алгоритма, либо неисправность снимается оператором для продолжения алгоритма
управления.
Алгоритмы аналогового управления.
Модули аналогового управления реализованы с
учетом того обстоятельства, что для 1У372, как и для всего
газоперерабатывающего завода, характерно медленное протекание технологических
процессов. Поэтому в контурах аналогового управления применен закон
ПИД-регулирования, реализованный по стандартной схеме с использованием
функционального блока PIDХE и AO. В зависимости от вида клапана, которым
управляет модуль (НО или НЗ), меняется структура модуля и его параметры.
Значения настроечных коэффициентов регуляторов (коэффициент пропорциональности,
постоянные времени интегрирования и дифференцирования) будут определены при
наладке системы на объекте.
Выработку предупреждающих и аварийных сигналов
(алармов) производят модули аналогового ввода. По данным этих модулей
контроллер осуществляет выработку дискретных сигналов, по которым производится
автоматическая блокировка или пуск назначенных устройств.
Алгоритмы управления электрическим приводом
вентиляционных систем и насосов.
Схема управления предусматривает:
три дискретных выходных сигнала (ПУСК, ОСТАНОВ,
ЗАПРЕТ ПУСКА ПО МЕСТУ);
дискретный входной сигнал состояния (РАБОТАЕТ);
команды управления, выдаваемые оператором или
алгоритмом управления (ПУСК, ОСТАНОВ).
Электрическая цепь, которая управляет реле
включения электропривода, состоит:
кнопки включения;
параллельных контактов самоблокировки цепи,
контактов пуска по команде оператора или контроллера и кнопки выключения;
контактов размыкания цепи для останова
электропривода по команде оператора или контроллера;
реле включения привода.
Контакт пуска последовательно соединен с
контактом запрета пуска по месту.
После выдачи управляющего сигнала, например ПУСК
(рисунок 2.25), и замыкания контактов контроллера срабатывает реле включения
привода и одновременно самоблокируется цепь управления.
По команде ОСТАНОВ (рисунок 2.26) вся цепь
кратковременно размыкается - электропривод выключается, контакты самоблокировки
размыкаются.
Алгоритм управления отрабатывается по командам
оператора или автоматически.

Рисунок 2.25 - Алгоритм запуска
Рисунок 2.26 - Алгоритм останова
Первоначально отображается текущее состояние
привода.
По команде управления ПУСК или ОСТАНОВ
запускается таймер (1-2сек.) для проверки реакции на команду управления, при
совпадении сигнала РАБОТАЕТ с состоянием выданной команды оператора до
истечения времени отработки таймера, алгоритм заканчивается. Если же состояние
входного сигнала не соответствует команде, то появляется сообщение об отказе.
В случае срабатывания алгоритмов блокировок
электропривод отключается
Средства проектирования
Основные средства проектирования - это FoxDraw,
FoxCAE.- это графический редактор для создания и обслуживания дисплеев
графического отображения динамики управления технологическим процессом. На
дисплеях могут отображаться технологическая установка, технологическая зона,
или подробное изображение части технологического процесса. Дисплейные объекты
могут быть динамически связаны с выбранными переменными или с выборами
оператора.позволяет создавать анимированные сенсорные окна (графические объекты
динамически изменяют свои свойства в зависимости от состояния переменных к
которым они присоединены). Такие оконные панели могут быть связаны с реальными
технологическими процессами через датчики, исполнительные устройства, модули
ввода/вывода промышленных контроллеров. Графический интерфейс FoxDraw
соответствует стандартам интерфейса, поддерживает перемещение, закрепление
панелей инструментов, открытие правой кнопкой мыши контекстного меню с часто
используемыми командами.
С помощью FoxDraw можно рисовать основные
объекты, используя при этом мышь вместе с панелями инструментов, позициями меню
и быстрыми клавишами. Есть возможность присваивать графические атрибуты
объектам и конфигурировать объекты, чтобы отображать изменения технологических
параметров или действия оператора. имеет многочисленные палитры объектов, такие
как насосы, резервуары, трубы, электрические двигатели, клапаны и символы ISA.
Также можно создавать собственные палитры для хранения сложных объектов и
стандартных символов компании. На рисунках 2.24 и 2.25 представлены мнемосхемы
технологических процессов абсорбционной очистки природного газа и регенерации
аминового сорбента на 1У372.
Каждая мнемосхема представляет собой графическое
отображение фрагмента технологического процесса с текущей информацией. При этом
показывается текущее значение параметров процесса, текущее состояние
оборудования, состояние сигнализаций, реперы точек контроля и др. Обновление
текущей информации на мнемосхеме выполняется автоматически с периодичностью
опроса датчиков устройствами ввода/вывода. Такая форма представления информации
наглядна и удобна.
Представленные мнемосхемы предназначены для
визуализации на экране монитора состояния технологического оборудования и
отображения текущих значений, контролируемых параметров 1У372 и используются
операторами-технологами в качестве основного средства контроля и управления
технологическим процессом.
Для облегчения работы оператора и обеспечения
хорошего восприятия фактического состояния технологического процесса на
мнемосхемах отображены объемные элементы мнемосхемы, максимально приближенные к
виду реальных конструкций оборудования. Мнемосхемы повторяют с некоторыми особенностями
функциональную схему автоматизации, содержат основное технологическое
оборудование и направления движения материальных потоков, отражают
принципиальную схему КИПиА с одновременной индикацией в цифровой форме:
значений контролируемых и регулируемых
технологических параметров;
значений сигналов, характеризующих
действительное состояние двухпозиционных, исполнительных механизмов
(отсекателей);
состояния (ВКЛ/ВЫКЛ) различного
электротехнического оборудования;
состояние технологического параметра относительно
технологических и аварийных регламентных значений.

Рисунок 2.27 - Мнемосхема «Очистка природного
газа»

Рисунок 2.28 - Мнемосхема«Регенерация аминового
сорбента»
Программа FoxCAE представляет мощную работающую
под Windows систему, которая полностью автоматизирует процесс разработки баз
данных для станций управления системы I/A Series. FoxCAE повышает эффективность
процесса разработки, позволяя создавать и документировать программы управления
в графической среде. FoxCAE также обеспечивает такой же удобный для
пользователя доступ к существующим базам данных процессоров управления (СР),
упрощая обслуживание и документирование.
Программное обеспечение FoxCAE
(Control Application Engineering) полностью использует графический интерфейс
пользователя Microsoft Windows, оно организует процесс разработки базы данных
управления в ряд окон для каждой из главных задач или в рабочие области. Когда
вы открываете базу данных проекта, система открывает окно рабочих областей, в
котором представлены функции системы (рисунок
<file:///C:\Documents%20and%20Settings\User\Рабочий%20стол\Информация%20для%20диплома\Foxboro\FoxDocRus\Applications\FoxCae\mr_01.htm>
2.29).позволяет перемещаться от одной функции к другой, не закрывая первую
задачу и возвращаясь в главное меню или окно. Каждое окно рабочей области
обеспечивает набор пиктограмм, позволяющих переходить от задачи к задаче.

Рисунок 2.29 - Окно рабочих областей
FoxCAE
обеспечивает графическую среду для
создания контуров управления, которые, в свою очередь, генерируют базу данных
(БД) компаундов и блоков, которые нужно загрузить на станцию управления системы
I/A Series.
Контуры создаются с помощью
редактора контуров управления путем выбора блоков управления и идентификации
входов и выходов технологического процесса. Чтобы автоматизировать данный
процесс, FoxCAE обеспечивает оперативные библиотеки с заранее
сконфигурированными данными управления, которые можно выбрать, чтобы создать
контур управления. Технологические объекты системы описываются в базе данных
как совокупность элементов контроля и управления.
Каждый элемент контроля и управления
описывается определенной структурой данных в зависимости от управляющего
комплекса, в состав которого он входит. Элементами контроля и управления
являются: аналоговые и дискретные входы и выходы, двигатели, задвижки, насосы.
В базе данных АСУ ТП 1У372
сконфигурированы следующие типы блоков ввода/вывода:
блок Аналогового Ввода;
блок Аналогового Вывода;
блок Дискретного Ввода;
блок Дискретного Вывода;
блок ПИД регулятора;
основной блок управления дискретными
устройствами.
Блок аналогового ввода (AIN)
принимает входной сигнал от одной точки (объекта управления), который может быть
аналоговым, частотно-импульсным или от интеллектуального типа полевого
устройства модуля Fieldbus (FBM) или Fieldbus (FBC), или от другого блока, и
преобразует его в подходящую форму для применения в стратегии управления
системы I/A Series. Входной сигнал, поступающий на данный блок, представляет
оцифрованные данные из блока управления оборудованием (ЕСВ) модуля FBM, а
выходной сигнал представляет значение, выраженное в соответствующих физических
единицах измерений.
Блок аналогового вывода (AOUT)
обеспечивает возможность вывода одного аналогового значения, направленного в
любой модуль Fieldbus (FBM) или модуль (FBC), способный управлять аналоговыми
выходными сигналами, для применения в стратегии управления системы I/A Series.
Данный блок поддерживает автоматический и ручной режимы работы, преобразование
(нормирование) сигнала, смещение диапазона и балансировку выходного сигнала.
Также данным блоком поддерживается каскадная инициализация и возможность
диспетчерского управления.
Блок дискретного (контактного) ввода
(CIN) обеспечивает стратегию управления с возможностью ввода одного дискретного
входного сигнала или вывода одного дискретного выходного сигнала в любом модуле
Fieldbus (FBM) или модуле FBC, содержащих такие сигналы. Данный блок также
обеспечивает функции обработки аварийных сигналов, касающиеся такого ввода.
Блок дискретного (контактного)
вывода (COUT) обеспечивает возможность вывода одного дискретного состояния,
направленного в любой модуль Fieldbus (FBM) или модуль (FBC), способный
управлять дискретными выходными сигналами, для применения в стратегии
управления системы I/A Series. Выполняет хранение выходного дискретного сигнала
и его адресацию и, в случае инвертирования, обеспечивает инвертирование
сигнала.
Блок расширенного ПИД регулирования
(Extended PID - PIDE) - Пропорциональный интегральный дифференциальный
регулятор со встроенной функцией самонастройки. Блок принимает входное значение
от аналогового ввода или другого ПИД-регулятора и вырабатывает управляющее
воздействие на исполнительный механизм в соответствии с выбранными
коэффициентами. Коэффициенты могут выбираться вручную или с помощью механизма
самонастройки. Блок позволяет работать в ручном, автоматическом, дистанционном
и местном режимах.
Основной блок управления дискретными
устройствами (General Device - GDEV) обеспечивает двухпозиционное управление
(Открыть/Закрыть) электрическими и пневматическими клапанами, а также
двухпозиционное
управление (Пуск/Останов)
электродвигателями с двухпроводными или трехпроводными схемами. Блок поддерживает
двухпроводную конфигурацию, используя один постоянный (sustained) выход, или
трехпроводную конфигурацию, используя два импульсных выхода, позволяет работать
с устройствами в ручном и автоматическом режимах.
На рисунках 2.27,2.28 представлены
контура управления, разработанные на языке функциональных блоков (Function
Block Diagrams, согласно стандарту IEC 61131-3).
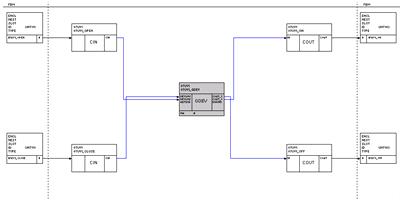
Рисунок 2.30 - Контур управления
отсекателем
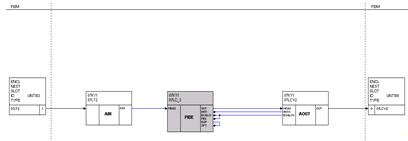
Рисунок 2.31 - Контур регулирования
уровня
Операторские средства
Операторские средства используются в
ходе повседневной эксплуатации системы управления технологическим процессом.
Основные
инструменты
оператора - FoxView,
AIM Historian, Alarm Manager, AIM Explorer.
FoxView - это «окно» в ПО системы
I/A Series, обеспечивающее удобный пользовательский интерфейс для доступа к
данным технологического процесса. Пользователь может взаимодействовать в
реальном времени с любыми данными установки, полевого оборудования и процесса.
FoxView обеспечивает:
вход в конфигурируемую пользователем
операционную среду, настроенную для конкретной категории пользователей -
инженеров-технологов, операторов и программистов;
просмотр встроенных трендов
реального времени и архивных трендов;
непосредственный доступ к
динамическим дисплеям процесса;
доступ к четырем последним по
времени использования дисплеям;
обслуживание и отображение алармов
процесса с помощью Администратора алармов;
обзор компаундов и блоков в базе
данных управления и доступ к детальным дисплеям блоков по умолчанию;
доступ к другим программам через
FoxSelect:Historian - это прикладная программа, которая выполняет сбор,
хранение, обработку и архивацию данных системы управления, необходимых для
построения трендов, графиков статического управления процессами (SPC), ведения
журналов регистрации, отчетов, таблиц и прикладных программ. Программа AIM
Historian принимает данные, поступающие от системы I/A Series фирмы Foxboro и
других систем автоматизации и управления, включая распределенные системы
управления (DCS), программируемые логические контроллеры и системы
диспетчерского управления и сбора данных (SCADA). Данные предыстории могут
включать в себя значения точек в реальном времени (RTP), сообщения о событиях,
таких как аварийные сигналы технологического процесса, и сообщения об описаниях
периодических процессов.
Экземпляр AIM Historian содержит
определяемую пользователем конфигурацию, которая задает собираемые данные и
определяет, где хранить заархивированные данные.
Пользователь может использовать
Historian для сбора данных, необходимых для выполнения следующих функций
контроля технологического процесса:
учет затрат;
анализ производительности
оборудования;
извлечение информации;
управление учетом ресурсов;
анализ простоев оборудования;
составление отчетов об обслуживании;
учет материалов;
анализ хода технологического
процесса;
контроль качества.- это
администратор алармов, обеспечивающий удобный пользовательский интерфейс для
просмотра заранее сконфигурированных дисплеев алармов и быстрых ответных
действий на алармы технологического процесса. В окне дисплея алармов выводятся
аларменные сообщения, инициированные управляющими блоками и относящиеся к
дискретному вводу, изменениям состояния, абсолютным аналоговым значениям,
отклонениям, скорости изменений, несоответствиям состояний устройств и другим
аларменным условиям.
Вызываемое из любой среды I/A
Series, окно дисплеев администратора алармов обеспечивает:
простой и быстрый доступ к последним
аларменным сообщениям через дисплей последних алармов и текущего аларма;
динамическое обновление статуса
алармов и значений параметров;
цветная кодировка приоритетов и
индикаторов статуса, что позволяет выделять наиболее важные алармы;
сводные дисплеи базы данных алармов
с определенным статусом;
ведение истории алармов;
возможность просмотра набора
алармов, отвечающих заданным пользователем критериям;
возможность отключения или
временного уменьшения громкости динамиков рабочей станции и клавиатуры
аварийной сигнализации;
защищенный доступ к аларменным
функциям в зависимости от полномочий пользователя или системы.Explorer - это
прикладная программа для архитектуры типа клиент/сервер фирмы Foxboro,
позволяющая пользователям отображать поступающие в реальном времени или
архивные технологические данные на рабочем столе Windows.Explorer позволяет
персоналу:
интерактивно выбирать объекты
данных, для которых надо построить тренд;
извлекать данные из приложений
Historians, FoxHistory или
AIM Historian системы
I/A Series;
отображать данные в нескольких
графических форматах;
осуществлять доступ к статистическим
данным;
вставлять данные в прикладные
программные пакеты, работающие в среде Windows.
Операционная система
В качестве операционной среды для
всех операторских станций используется операционная система Windows ХР Service
Pack 2.ХР - это надежная, современная, высокооперативная, мощная и
высокопроизводительная операционная система, позволяющая естественным образом
реализовать решения на базе архитектуры клиент-сервер. Windows NT сохраняет
преемственность интерфейса Windows.
Высокая надежность Windows ХР
определяется:
модульностью архитектуры Windows ХР,
обеспечивающей защиту памяти процессов и вытесняющую многозадачность,
предохраняющей прикладные задачи и саму операционную систему от некорректно
работающих приложений;
системой защиты доступа Windows ХР,
предотвращающей несанкционированный доступ к приложениям и данным;
отказоустойчивой файловой системой
ХР, в которой все файловые операции основаны на транзакциях, обеспечивающих
возможность возврата к нормальному состоянию в случае сбоя.
Вытесняющая многозадачность,
многопроцессорность и многопоточность, страничная организация виртуальной
памяти, поддержка симметричной многопроцессорной обработки (SMP), встроенные
сетевые возможности обеспечивают высокую производительность Windows ХР.ХР
обеспечивает ключевые технологии: DDE (Обмен динамическими данными), OLE
(Связывание и встраивание объемов), OPC - OLE для управления процессами и ODBC
(подключение открытых баз данных).
4. Расчет технико-экономических
показателей
Система автоматизированного
управления технологическим процессом предназначена для автоматического сбора
данных и автоматизированного контроля, управления, защиты в реальном масштабе
времени технологических процессов на установке абсорбционной очистки природного
газа 1У372.
Автоматизируемым пунктом управления
является операторная третьей очереди Оренбургского ГПЗ. Характер протекания
технологических процессов во времени на установке непрерывный.
.1 Экономические показатели
предлагаемой АСУТП
.1.1 Расчет сметной стоимости
предлагаемой системы
В сметную стоимость проекта
включаются все затраты, связанные с его выполнением. Определение затрат
производится путем составления калькуляции себестоимости.
Расчет затрат на покупные изделия и
полуфабрикаты.
При построении системы АСУТП 1У372
используются готовые к работе модули и приборы, перечень которых приведен в
приложении 1 к дипломному проекту, их общая стоимость определяется по формуле:
|
 ;(3.1) ;(3.1)
|
|
где  - затраты на покупные изделия и
полуфабрикаты, рубли;- норма расхода j-го комплектующего изделия,
полуфабриката, штуки;
- затраты на покупные изделия и
полуфабрикаты, рубли;- норма расхода j-го комплектующего изделия,
полуфабриката, штуки;
Цj - цена единицы j-го
комплектующего изделия, полуфабриката, рубли/штуки;=1..m - перечень покупных изделий
и полуфабрикатов на единицу изделия.
Таблица 3.1 - Затраты на покупные
изделия и полуфабрикаты.
|
Наименование
изделия
|
Стоимость,
руб
|
|
Стоимость
оборудования АСУ ТП 1У372, рассчитанная по формуле 5.1 в соответствии с
приложением 1 к дипломному проету
|
14.189.065
|
|
Разработка
алгоритмов управления, мнемосхем процесса, написание контуров управления (два
программиста работают в течении двух месяцев)  60.000 60.000
|
|
|
Обучение
работников участка АСУ III очереди Оренбургского ГПЗ (инженера-электроника,
инженера-программиста)  132.000 132.000
|
|
Расчет затрат на заработную плату.
Затраты на сборочно-монтажные работы. Сборочную
(80 часов) и монтажную (180 часов) работу ведут два инженера-электронщика I
категории (оклад 11640 рублей в месяц) и шесть слесарей КИПиА 6-го разряда
(оклад 7450 рублей в месяц).
Затраты на пуско-наладочные работы. Работу
выполняют два слесаря КИПиА 6-го разряда, один инженер-электронщик I категории,
два инженера-программиста I категории (оклад 11400 рублей в месяц). Время
пуско-наладочных работ 120 часов.
Основная заработная плата работников
определяется по формуле:
|
 ;(3.2) ;(3.2)
|
|
где  - основная заработная плата
разработчика, руб; пп - трудоемкость, чел/ч;
- основная заработная плата
разработчика, руб; пп - трудоемкость, чел/ч;
Ом - месячный оклад разработчика,
руб.;
Др - количество рабочих дней в
месяце, дни; - длительность рабочего дня, часы.
Тогда, на сборочно-монтажные и
пуско-наладочные работы основная заработанная плата составит:



Дополнительная заработная плата
работников рассчитывается по формуле:
|
 ;(3.3) ;(3.3)
|
|
где  - дополнительная заработная плата
разработчика, руб.;
- дополнительная заработная плата
разработчика, руб.;
Нд - норматив дополнительной
заработной платы, %.
Норма дополнительной заработной
платы для инженеров составляет 45%, для слесарей КИПиА 18 %. Следовательно,
дополнительная заработанная плата составит:

Отчисления на социальные нужды
рассчитываются по формуле:
|
 ;(3.4) ;(3.4)
|
|
где Ссн - отчисления на социальные нужды, рубли;
Кр - районный коэффициент (15 %);
Нсн - норматив отчислений на социальные нужды
(26 %), %,
Подставив значения в формулу 5.4, получим:

Затраты на электроэнергию при
проведении пуско-наладочных работ составят:
|
 ;3.5) ;3.5)
|
|
где Сэл - затраты на электроэнергию на
технологические цели, рубли;
Цэл - тариф на электроэнергию (1.15 руб/кВт×ч),
руб/кВт×ч;
Мi - потребляемая мощность i-го вида
оборудования (5.3 кВт наладка оборудования производится поочередно для каждой
установки), кВт;дФ - действительный фонд времени (120 ч), машино-часы.
Следовательно, затраты на электроэнергию
составят:

Сметная стоимость рассчитывается по
формуле:
|
 ;(3.6) ;(3.6)
|
|
где  - сметная стоимость, руб.
- сметная стоимость, руб.
Таким образом, сметная стоимость
(капитальные затраты) на внедрение системы АСУТП 1У372, будет составлять:

Согласно Общероссийскому
классификатору основных фондов предлагаемую систему АСУТП можно отнести к
категории оборудования для контроля технологических процессов (четвертая группа
со сроком использования свыше 5 лет до 7 лет включительно), следовательно,
амортизационные отчисления составят 2066727,62 рублей в год.
.1.2 Расчет годовых издержек ГПЗ при
эксплуатации предлагаемой АСУТП
Расчет годовых эксплуатационных
издержек предприятия проводится методом прямого счета по формуле:
|
 ;(3.7) ;(3.7)
|
|
где  - годовые текущие издержки
потребителя, руб.;
- годовые текущие издержки
потребителя, руб.;
 - заработная плата обслуживающего
персонала, руб.;
- заработная плата обслуживающего
персонала, руб.;
 - затраты на ремонт, руб;
- затраты на ремонт, руб;
 - затраты на потребляемую
электроэнергию, руб.;
- затраты на потребляемую
электроэнергию, руб.;
- амортизационные отчисления, руб.;
За оборудованием на двух установках
планируется закрепить двух прибористов (оклад 7690 руб.) и двух
операторов-технологов (пятибригадный круглосуточный режим работы по 8 часов,
оклад 9780 руб.). Инженер-электронщик I категории (оклад 11650 руб.) и
инженер-программист II категории (оклад 9430 руб.) обслуживают оборудование в
моменты плановой остановки установок (за исключением в не штатных ситуаций
связанных с отказом оборудования АСУТП, но с учетом высокой надежности
проектируемой системы время простоя установок по причине неисправности системы
АСУТП сведено к минимуму), что составляет около 80 часов в год. Технологическое
оборудование не входит в состав АСУТП, поэтому машинисты, в рамках дипломного
проекта, не рассматриваются в качестве обслуживающего персонала.
Заработная плата обслуживающего
персонала определяется по формуле:
|
 ;(3.8) ;(3.8)
|
|
где Чобс - численность обслуживающего персонала,
чел.;обс - время затрачиваемое на обслуживание, ч/год;
Нсн - норматив отчислений на социальные нужды;
НД - норматив отчислений на дополнительную
заработную плату;ч - часовая тарифная ставка, руб/час.
С учетом начисления оплаты труда в виде
должностных окладов получим:



Накладные расходы рассчитываются по
формуле:
|
 ;(3.9) ;(3.9)
|
|
где Сн - накладные расходы, рубли;
Нр - норматив накладных расходов (10 %), %.
Подставив значения в формулу (5.9) получим:

Затраты на потребляемую
электроэнергию рассчитываются по формуле:
|
 ;(3.10) ;(3.10)
|
|
где Цэл - тариф на электроэнергию (1.15 руб/кВт×ч),
руб/кВт×ч;
Мi - потребляемая мощность i-го вида оборудования
(5.3 кВт наладка оборудования производится поочередно для каждой установки),
кВт;дФ - действительный фонд времени (358 дней), машино-часы.
Подставив значения в формулу 5.10, получим:

Затраты на ремонт оборудования
рассчитываются по формуле:
|
 ;(3.11) ;(3.11)
|
|
где НРУ - норматив затрат на ремонт (2.5 %), %.

Подставив полученные значения в
формулу (3.7) получим годовые эксплутационные издержки потребителя:

Рассчитанные значения экономических
характеристик предлагаемой АСУТП сведем в таблицу 3.2.
Таблица 3.2 - Затраты на
предлагаемую АСУТП
|
Наименование
затрат
|
Сумма,
руб.
|
|
Сметная
стоимость
|
14
467 094
|
|
Амортизационные
отчисления, руб/год
|
2
066 728
|
|
Годовые
эксплуатационные издержки предприятия
|
4
651 200
|
.2 Экономические показатели существующей АСУТП
.2.1 Расчет сметной стоимости существующей
системы
Существующая система управления технологическими
процессами на 1У372 построена на базе комплексного импортного оборудования,
поставленного французской фирмой «ТЕКНИП» и введена в эксплуатацию 30 сентября
1978 года. За время эксплуатации дважды в 1987 и 1996 годах была произведена ее
частичная реконструкция с проведением замены оборудования КИП и А.
Средний срок службы подобной системы 8 лет, т.е.
оборудование не только морально, но и физически устарело. Ниже следующие
расчеты применимы для существующей системы так, как если бы ее внедряли в
настоящее время, с учетом цен на подобные системы с аналогичными техническими
характеристиками.
Расчет затрат на покупные изделия и
полуфабрикаты.
Согласно формуле 3.1 и технической документации
на существующую систему АСУТП.
Таблица 3.3 -Затраты на покупные изделия и
полуфабрикаты.
|
Наименование
изделия
|
Коли-чество
|
Стоимость
единицы изделия, руб.
|
Суммарная
стоимость, руб.
|
|
Преобразователь
уровня MASONEILAN
|
2шт.
|
26147
|
52294
|
|
Уровнемер
буйковый пневматический типа УБ-П
|
3
шт.
|
19560
|
58680
|
|
Датчик
перепада давления сильфонный с пневматическим вых. сигналом ДС-П3
|
1
шт.
|
13500
|
13500
|
|
Преобразователь
измерительный избыточного давления МП-П2-9112
|
8
шт.
|
12500
|
100000
|
|
Преобразователь
измерительный разности давления 13ДД11-720
|
9
шт.
|
13100
|
117900
|
|
Преобразователь
измерительный разности давления TPN5.1PDH1
|
7
шт.
|
28510
|
199500
|
|
Преобразователь
измерительный разности давления ДПП-2-12
|
16
шт.
|
11400
|
182400
|
|
Термоэлектрический
преобразователь (ТХА) фирмы Berger (Франция), цена усредненная
|
30шт.
|
6450
|
193500
|
|
Устройство
контроля и регистрации теплофизических и температурных измерений HONEYWELL
|
1шт.
|
179885
|
179885
|
|
Прибор
вторичный самопишущий типа ПВ-2.3
|
4шт.
|
15100
|
60400
|
|
Прибор
контроля пневматический показывающий и регулирующий ПВ-3.2
|
3шт.
|
19250
|
57750
|
|
Прибор
контроля пневматический показывающий ПВ-1.3
|
4шт.
|
9215
|
36860
|
|
Прибор
контроля пневматический самопишущий ПВ10.1Э
|
10шт.
|
16880
|
168800
|
|
Прибор
контроля пневматический самопишущий ПВ10.2Э
|
13шт.
|
17210
|
223730
|
|
Электро-контактный
манометр типа ЭКМ-1У
|
26шт.
|
12500
|
325000
|
|
Вторичный
прибор типа ПВ-4.4Э
|
2шт.
|
16100
|
32200
|
|
Редуктор
воздушный типа РДФ-3
|
25шт.
|
2215
|
55375
|
|
Пневмокабель
ТПВБб 7´8´1,6
|
1000м.
|
54765
|
54765
|
|
Пневмотрубка
аллюминевая 8´1
|
500м.
|
5920
|
5920
|
|
Реле
типа ПЭ-21Э
|
20шт.
|
60
|
1200
|
|
Реле
типа РМУГ
|
160шт.
|
60
|
9600
|
|
Провод
монтажный
|
500м.
|
2065
|
10325
|
|
Итого:
|
|
|
2
139 584
|

Расчет затрат на заработную плату.
Затраты на сборочно-монтажные
работы. Сборочную (80 часов) и монтажную (180 часов) работу ведут два
инженера-электронщика I категории (оклад 11640 рублей в месяц) и шесть слесарей
КИПиА 6-го разряда (оклад 7450 рублей в месяц).
Затраты на пуско-наладочные работы.
Работу выполняют два слесаря КИПиА 6-го разряда, один инженер-электронщик I
категории, два инженера-программиста I категории (оклад 11400 рублей в месяц).
Время пуско-наладочных работ 120 часов.
Основная заработная плата работников
определяется по формуле 3.2:

Дополнительная заработная плата
работников рассчитывается
по формуле 3.3:
Отчисления на социальные нужды
рассчитываются по формуле 3.4:

Затраты на электроэнергию при
проведении пуско-наладочных работ согласно формуле 3.5:

Сметная стоимость рассчитывается по
формуле 3.6:
Таким образом, сметная стоимость
(капитальные затраты) на реконструкцию системы управления, будет составлять:

Согласно Общероссийскому
классификатору основных фондов предлагаемую систему АСУТП можно отнести к
категории оборудования для контроля технологических процессов (четвертая группа
со сроком использования свыше 5 лет до 7 лет включительно), следовательно,
амортизационные отчисления составят 338031,8 рублей в год.
.1.2 Расчет годовых издержек ГПЗ при
эксплуатации существующей системы
В настоящий момент установки
обслуживают два прибориста (оклад 7690 руб.) и два оператора-технолога
(пятибригадный круглосуточный режим работы по 8 часов, оклад 9780 руб.).
Инженер-электронщик I категории (оклад 11650 руб.) и инженер-программист II
категории (оклад 9430 руб.) обслуживают оборудование в моменты плановой
остановки установок, а так же участвуют в профилактическом обслуживании АСУТП,
что составляет около 320 часов в год.
С учетом начисления оплаты труда в
виде должностных окладов получим:


Накладные расходы рассчитываются по
формуле 3.9:

Затраты на потребляемую
электроэнергию рассчитываются по формуле 3.10:

Затраты на ремонт оборудования
рассчитываются по формуле 3.11:

Годовые эксплуатационные издержки
предприятия определяются по формуле 3.7:

Таблица 3.4 - Затраты на
существующую АСУТП
|
Наименование
затрат
|
Сумма,
руб.
|
|
Сметная
стоимость
|
2
366 223
|
|
Амортизационные
отчисления, руб/год
|
338
032
|
|
Годовые
эксплуатационные издержки предприятия
|
2
695 952
|
.3 Определение срока окупаемости предлагаемой
АСУТП
На основании анализа таблиц 3.2 и 3.4 можно
сделать предварительный вывод, что предлагаемая система АСУ ТП 1 У372 гораздо
дороже существующей системы управления ( ≈ в 7 раз);
Для дальнейшего анализа срока окупаемости
внедряемой АСУТП необходимо принять к сведению, что существующая система
управления технологическими процессами не удовлетворяет современным требованиям
уровню автоматизации и степени защиты технологического оборудования, а именно:
используемая система щитового управления
значительно уступает по всем показателям системам управления с использованием
автоматизированных рабочих мест (АРМ) на базе персональных компьютеров.
применяемые пневматические
контрольно-измерительные приборы и средства автоматизации устарели как
морально, так и физически, что не позволяет обеспечить необходимые точность
измерений, время принятия решений, скорость управления, а также степень
надежности работы системы управления, причём серийного выпуска некоторого
оборудования для базовой системы промышленностью уже не производится;
среднее время безотказной работы для управляющей
функции существующей системы составляет около 2503 часа с вероятностью
безотказной работы равной 0.7, а для внедряемой - 34843 часов с вероятностью -
0.77;
предлагаемая система автоматизированного
управления усовершенствует противоаварийную защиту объекта автоматизации
учитывая человеческий фактор, тем самым, сохраняя работоспособным дорогостоящее
оборудование при реализации.
Вопрос экономической эффективности внедрения
автоматизированной системы управления технологическими процессами, в условиях
постоянного сокращения добычи газа ОГКМ и постепенного перехода на давальческое
сырье, на газоперерабатывающем заводе актуален как никогда.
Основной экономический эффект, предлагаемой АСУ
ТП 1У372, достигается за счет внедрения контуров регулирования концентрации Н2S
в регенерированном амине. Данные контура регулирования реализованы с
применением новейших спектрофотометрических газоанализаторов АМЕТЕК 4650 и
позволяют, в соответствии с расчетом, проведенным в разделе 2.1., сократить
непроизводительные потери пара низкого давления до 46302 Гкал в год. Тарифы на
энергоносители, а в частности пар низкого давления, в последние годы неуклонно
растут.
Это видно из представленной ниже таблицы 3.5.
Таблица 3.5 - Тарифы на пар низкого давления.
|
Тариф
за 1 Гкал, руб.
|
|
2001г.
|
2002г.
|
2003г.
|
2004г.
|
2005г.
|
2006г.
|
|
Пар
низкого давления
|
160,7
|
209,79
|
270,3
|
310,14
|
350,58
|
360,3
|
Таким образом, сокращение расходов предприятия
на теплоноситель, с учетом тарифа 2006 года составит:
П = 46302х360,3=16 682 610,6 руб
При этом для оценки экономической эффективности
внедряемой АСУ ТП необходимо учесть изменение годовых эксплуатационных издержек
предприятия. Тогда годовой экономический эффект внедряемой системы составит:
Э = П - (Ивнедр - Исущ)= 16 682 610,6 - (4 651
200-2 695 952) =14 727 362,6 руб
Тогда, срок окупаемости внедряемой системы будет
равен:
 .
.
Результаты расчетов сведены в
таблицу 3.5, которая также представлена на плакате № 6.
Таблица 3.5 -Показатели
экономической эффективности АСУ ТП 1У372
|
№
п/п
|
Показатели
|
Единицы
измерения
|
Значение
(+/-)
|
|
1
|
Технологические
показатели проекта: - увеличение продолжительности безотказной работы с 2503
до 34843 часов; - сокращение времени на обслуживание системы
высококвалифицированными специалистами - снижение расхода теплоносителя на
регенерацию аминового сорбента за счет внедрения контуров регулирования
|
час. чел/час. Гкал/год
|
+32340 - 480 - 46 302
|
|
2
|
Изменение
эксплуатационных расходов, в том числе за счет: - увеличение амортизационных
отчислений; - снижение потребляемой электроэнергии; - рост затрат на текущий
ремонт; - снижение накладных расходов; - фонд заработной платы обслуживающего
персонала; - снижение расходов на теплоноситель (пар низкого давления)
|
руб/год руб/год руб/год руб/год руб/год руб/год
|
+ 1 728 696 - 16 904 + 301 237 - 5 253 - 52 528 - 16 682 610
|
|
3
|
Показатели
эффективности внедряемой системы: - капитальные затраты; - годовой
экономический эффект; - период окупаемости.
|
руб.
руб/год. мес.
|
14
467 094 14 727 363 12
|
5. Безопасность труда
Государственный стандарт определяет условия
труда как «совокупность факторов производственной среды, оказывающих влияние на
здоровье и работоспособность человека в процессе труда».
Данный раздел посвящен оценке условий труда и
выработке мероприятий по их улучшению.
.1 Анализ и обеспечение безопасных условий труда
Организация и оценка рабочего места диспетчера с
ПЭВМ в помещении диспетчерского пункта осуществляется в соответствии с
требованиями СанПиН 2.2.2/2.4.1340-03 «Гигиенические требования к персональным
электронно-вычислительным машинам и организации работы».
Персональный компьютер расположен в помещении
площадью 12 м2. Рабочее место имеет следующие параметры: высота рабочего стола
составляет 725 мм, ширина 1200 мм и глубина 1000 мм; рабочий стол имеет пространство
для ног высотой 650 мм, шириной 600 мм, глубиной 650 мм. Конструкция рабочего
стола обеспечивает оптимальное размещение на рабочей поверхности стола
используемого оборудования с учетом его количества и конструктивных
особенностей, характера выполняемой работы. Рабочий стул (кресло) является
подъемно-поворотным и регулируемым по высоте и углам наклона сиденья и спинки.
А также расстоянию спинки от переднего края сиденья. Конструкция его
обеспечивает:
ширину и глубину поверхности сиденья не менее
400 мм;
поверхность сиденья с закругленными передним
краем;
регулировку высоты сиденья в пределах 350 - 600
мм;
высоту опорной поверхности спинки около 400 мм,
ширину - 350 мм;
угол наклона спинки в пределах (0 - 30) °;
стационарные подлокотники длиной 300 мм;
поддержание рациональной рабочей позы.
Поверхность сиденья и спинки стула полумягкая, с
неэлектризующимся и воздухонепроницаемым покрытием, обеспечивающим легкую
очистку от загрязнений. Основные параметры стола и стула для оператора ЭВМ
полностью удовлетворяют стандартам. Экран монитора находится от глаз
пользователя на расстоянии 600 мм.
Компьютер в полной мере удовлетворяет
требованиям, предъявляемым к электронно-вычислительной машине.
Жидкокристаллический монитор фиксирован в заданном положении для обеспечения
фронтального наблюдения. Корпус ПЭВМ, клавиатура и другие устройства ПЭВМ имеют
матовую поверхность одного цвета и не имеют блестящих деталей, способных
создавать блики. Частота обновления изображения должна составляет не менее 60
Гц для дискретных экранов. Клавиатура располагается на поверхности стола на
расстоянии (100-300) мм от края.
Поверхность пола в помещении удобная для очистки
и влажной уборки, которая проводится ежедневно. Для внутренней отделки
помещения использованы диффузно-отражающие или полимерные материалы,
разрешенные для применения органами и учреждениями Государственного
санитарно-эпидемиологического надзора.
В помещении предусмотрено естественное и
искусственное освещение в соответствии с СанПиН 2.2.2/2.4.1340-03. Естественное
освещение осуществляется через два окна. Площадь оконного проема 2,5 кв. м.
Естественный свет от световых проемов падает слева, ен = 1 % и еф = 0,8 % .
Оконные проемы в помещении оборудованы жалюзи. Искусственное освещение
представляет собой четыре люминесцентные лампы типа ЛБ по 65 Вт при этом Ен =
300 лк и Еф = 360 лк. Для обеспечения нормируемых значений освещенности следует
проводить чистку стекол оконных рам и светильников не реже двух раз в год и
проводить своевременную замену перегоревших ламп.
Первичные средства пожаротушения (огнетушитель
ОП-10, ящик с песком) размещены в местах, согласованных с местной пожарной
охраной. К ним обеспечен свободный доступ.
В холодный период года температура воздуха равна
20 °С, относительная влажность составляет (40-50) %, скорость движения воздуха
не более 0,2 м/с. В теплый период года температура воздуха в помещение равна 29
°С относительная влажность - 45 %, скорость движения воздуха 0,3 м/с.
Содержание вредных химических веществ в воздухе не превышает среднесуточной концентрации
для атмосферного воздуха. Микроклимат помещения в теплый период не
удовлетворяет оптимальным нормам микроклимата для помещений с видео дисплейными
терминалами и ПЭВМ в соответствии с СанПиН 2.2.2/2.4.1340-03.
При выполнении основной работы на ПЭВМ уровень
шума на рабочем месте составляет не более 20 дБА (при допустимой норме 50 дБА).
Уровень вибрации в помещении не превышает допустимых норм.
Данное помещение не удовлетворяет требованиям
СанПиН 2.2.2/2.4.1340-03. Поэтому в помещении необходимо установить
Сплит-систему для кондиционирования помещения, как эффективное средство
улучшений условий труда. С ее помощью из помещения удаляется загрязненный пылью
воздух, а также избытки тепла, паров воды. Взамен загрязненного воздуха в
помещение подается чистый наружный воздух.
Величина физической нагрузки: общая, выполняемая
мышцами корпуса и ног за смену (работа диспетчера не предусматривает большой
физической нагрузки) до 42000 кгс/м; региональная, выполняемая мышцами
плечевого пояса за смену до 21000 кгс/м; рабочая поза, рабочее место (поза
несвободная (сидя) до 25 % рабочего времени рабочий находится в наклонном
положении под углом до 30º). Величина
нервно - психической нагрузки: длительность сосредоточенного наблюдения
снизилась с 30 до 20 % от рабочего времени за смену; число важных объектов
наблюдения уменьшилось с 8 до 4; количество движений в час до 250; количество
сигналов в час до 75. Напряжение зрения: размер объекта, различения более 5,0
мм; точность зрительных работ малой точности; разряд зрительных работ VI.
Монотонность: число приёмов (элементов и операций) более 10; длительность
повторяющихся операций (31 - 100) минут.
Продолжительность обеденного перерыва составляет
60 минут. Продолжительность непрерывной работы без регламентированного перерыва
не превышает 2 часов. Время регламентированного перерыва составляет 15 мин
после 2 часов непрерывной работы при норме не менее 15 мин после 2 часов
непрерывной работы.
.2 Расчет тяжести труда диспетчера и ее
интегральная оценка
Расчет тяжести труда проводится для наиболее
неблагоприятных условий. Для этого проводим оценку условий труда в баллах до и
после внедрения мероприятий. Результаты оценки целесообразно привести в виде
таблицы.
Определяем интегральную оценку тяжести до и
после внедрения мероприятий по формуле [17]:
UТ = , (5)
, (5)
где UТ - интегральный
показатель категории тяжести в баллах;
 - сумма количественной оценки в
баллах значимых элементов условий труда без Хmax- количество элементов условий
труда;
- сумма количественной оценки в
баллах значимых элементов условий труда без Хmax- количество элементов условий
труда;
- число, введённое для удобства
расчётов.
В таблице 4.1 приведены значения
условий труда диспетчера
Таблица 4.1 - Значение условий труда
диспетчера в баллах
|
Факторы
|
Оценка
факторов
|
|
До
внедрения
|
После
внедрения
|
|
значение
|
балл
|
значение
|
балл
|
|
1
|
2
|
3
|
4
|
5
|
|
Санитарно-гигиенические:
- температура воздуха на рабочем месте: в холодный период года, о С в теплый
период года, о С - относительная влажность воздуха, %
|
20 29 45
|
1 4 1
|
22 20 45
|
1 1 1
|
|
-
скорость движения воздуха: в холодный период года, м/с в теплый период года
м/с - уровень вибрации, дБ - уровень шума, дБА - освещение: естественное, %
искусственное, лк
|
0,2
0,3 ниже 0,1 20 0,8 360
|
2
2 1 1 2 1
|
0,2
0,2 ниже 0,1 20 0,8 360
|
2
2 1 1 2 1
|
|
Психофизиологические:
- величина физической нагрузки: общая, выполняемая мышцами корпуса и ног,
кгс-м региональная, выполняемая мышцами плечевого пояса, кгс-м рабочая поза,
рабочее место - величина нервно - психической нагрузки: длительность
сосредоточенного наблюдения, % число важных объектов наблюдения количество
движений в час количество сигналов в час - напряжение зрения: размер объекта,
различения, мм
|
до 42000 до 21000 до 25 % рабочего времени под углом 30 0 30 8 до 250 до
75 более 0,5
|
1 1 3 2 2 1 1 1
|
до 42000 до 21000 до 25 % рабочего времени под углом 30 0 20 4 до 250 до
75 Более 0,5
|
1 1 3 1 1 1 1 1
|
|
точность
зрительных работ разряд зрительных работ - монотонность: число приёмов
(элементов и операций) длительность повторяющихся операций
|
малой
точности 5 5 (31-100)
|
2
2 3 2
|
малой
точности 5 5 (31-100)
|
2
2 3 2
|
Расчет до внедрения мероприятий:
= ·10 = 45,71
Что соответствует четвертой категории тяжести
труда.
После внедрения мероприятий:
U1 = ·
·
·10 = 37,38
Что соответствует третей
категории тяжести труда.
Прогнозирование изменения
травматизма определяем по формуле [17]:
К =  , (6)
, (6)
где К - рост производственного
травматизма, количество раз;Т - интегральный показатель категории тяжести труда
в баллах.
В реальных условиях эксплуатации до
внедрения мероприятий оцениваем по формуле:
К =  = 2,2
= 2,2
Возможен рост травматизма в 2,2 раза
из-за четвертой категории тяжести труда.
После внедрения мероприятий
категория тяжести труда снизилась до третей, что соответствует росту
травматизма в 1,64 раз по сравнению с рациональными условиями труда:
К =  = 1,64
= 1,64
Для того чтобы выяснить, как
изменилась работоспособность после внедрения мероприятий по ее повышению,
необходимо определить показатели ее уровня.
Показатель утомления:
У =  , (7)
, (7)
где У - показатель утомления в
условных единицах;
,6 и 0,64 - коэффициенты регрессии;-
интегральный показатель категории тяжести в баллах.
Зная степень утомления, можно
определить уровень работоспособности:
= 100 - y, (8)
где R - уровень работоспособности в
условных единицах до внедрения комплекса мероприятий.
Показатель утомления определяется по
формуле:
У =  = 47,1
= 47,1
Уровень работоспособности
определяется по формуле:
= 100 - 47,1 = 52,9
После внедрения мероприятий:
показатель утомления:
У =  = 34,03;
= 34,03;
уровень работоспособности:
= 100 - 34,03 = 65,97
Изменения производительности труда
за счет изменения работоспособности по формуле [17]:
ППТ =  , (9)
, (9)
где ППТ - прирост производительности
труда;и R2 - работоспособность в условных единицах до и после внедрения
мероприятий;
,2 - поправочный коэффициент.
ППТ =  = 4,94
= 4,94
.3 Возможные чрезвычайные ситуации
Чрезвычайная ситуация (ЧС) - это
обстановка на определенной территории, сложившаяся в результате аварии,
опасного природного явления, катастрофы, стихийного или иного бедствия, которые
повлекли за собой человеческие жертвы, ущерб здоровью людей и окружающей
природной среде, значительные материальные потери и нарушение условий
жизнедеятельности людей. В зависимости от сферы возникновения ЧС бывают
антропогенные (связанные с жизнедеятельностью человека), техногенные (аварии,
катастрофы), стихийные (вызванные стихийными природными явлениями).
ЧС в своем развитии проходят пять
условных фаз:
накопление отклонений;
инициирование чрезвычайного события;
процесс чрезвычайного события;
выход аварии за пределы объекта;
ликвидация последствий аварии.
Кроме того, ЧС классифицируются по
ведомственной принадлежности и по масштабу и границе распространения поражающих
факторов.
Рабочее место оператора ПЭВМ
(диспетчера) и производственные здания могут стать как источником локальной ЧС
техногенного происхождения, так и оказаться под воздействием ЧС масштаба здания
или предприятия, местной или территориальной ЧС. Без своевременной ликвидации
локальная ЧС может разрастись до масштабов здания и даже предприятия.
Опасными факторами, воздействующими
на людей и материальные ценности, являются:
пламя и искры;
повышенная температура окружающей
среды;
токсичные продукты горения и
термического разложения;
дым;
пониженная концентрация кислорода.
К вторичным проявлениям опасных
факторов пожара, воздействующим на людей и материальные ценности, относятся:
осколки, части разрушившихся
аппаратов, агрегатов, установок, конструкций;
радиоактивные и токсичные вещества и
материалы, вышедшие из разрушенных аппаратов и установок;
электрический ток, возникший в
результате выноса высокого напряжения на токопроводящие части конструкций,
аппаратов, агрегатов;
опасные факторы взрыва по ГОСТ
12.1.010, происшедшего вследствие пожара;
огнетушащие вещества.
Наиболее вероятно возможной
чрезвычайной ситуацией является пожар в производственном здании УКПГ-8.
Для обеспечения противопожарной
защиты проводятся организационные и технические мероприятия.
Организационные мероприятия:
организация ведомственных служб
пожарной безопасности в соответствии с законодательством;
организация обучения работающих
правилам пожарной безопасности на предприятии;
разработка и реализация норм и
правил пожарной безопасности, инструкций о порядке обращения с пожароопасными
веществами и материалами, о соблюдении противопожарного режима и действиях
людей при возникновении пожара;
изготовление и применение средств
наглядной агитации по обеспечению пожарной безопасности;
паспортизация материалов, изделий,
зданий и сооружений объектов в части обеспечения пожарной безопасности;
нормирование численности людей на
объекте по условиям безопасности их при пожаре;
разработка мероприятий по действиям
администрации, рабочих, служащих и населения на случай возникновения пожара и
организация эвакуации людей.
Технические мероприятия:
применение основных видов,
требуемого количества пожарной техники, ее размещение и обслуживание по ГОСТ
12.4.009; применяемая пожарная техника обеспечивает эффективное тушение пожара
(загорания) и безопасна для природы и людей;
применение средств своевременного
оповещения людей, таких как пожарная сигнализация;
применение основных строительных
конструкций и материалов, в том числе используемых для облицовок конструкций, с
нормированными показателями пожарной опасности;
применение пропитки конструкций объектов
антипиренами и нанесением на их поверхности огнезащитных красок (составов);
применение устройств и средств,
обеспечивающих ограничение распространения пожара.
.3.1 Расчет эвакуационных путей и
выходов
В соответствии с требованиями СНиП
II-2-80 объект должен иметь такое объемно-планировочное и техническое
исполнение, чтобы эвакуация людей из него была завершена до наступления
предельно допустимых значений опасных факторов пожара. Для обеспечения
эвакуации необходимо:
установить количество, размеры, и
соответствующее конструктивное исполнение эвакуационных путей и выходов;
обеспечить возможность
беспрепятственного движения людей по эвакуационным путям;
организовать при необходимости
управление движением людей по эвакуационным путям (световые указатели, звуковое
и речевое оповещение и тому подобное).
Для обеспечения безопасной эвакуации
людей из помещения расчетное время эвакуации должно быть меньше необходимого
времени эвакуации людей. Расчетное время эвакуации определяется исходя из
протяженности эвакуационных путей и скорости движения людских потоков на всех
участках пути от наиболее удаленных мест до эвакуационных выходов. При этом
весь путь движения людского потока делится на участки, имеющие определенную
исходя из плана помещения длину и ширину.
Эвакуация производится из
диспетчерского пункта, в котором находится два человека.
Расчетное время эвакуации людей tр
определяется как сумма времени движения людского потока по отдельным участкам
пути ti по формуле [18]:
 (10)
(10)
где t1 - время движения людского
потока на первом (начальном) участке, мин;, t3,..., ti - время движения
людского потока на каждом из следующих после первого участка пути, мин;
Плотность людского потока D1 на
первом участке пути, м2/м2, вычисляют по формуле [18]:
 (11)
(11)
где N1 - число людей на первом
участке, чел;- средняя площадь горизонтальной проекции человека, принимаемая
равной 0,1 м2 (для взрослого человека в домашней одежде);
d1,
- ширина первого участка пути, м.
Рассчитываем плотность людского
потока D1 на первом участке пути, м2/м2,
 м2/м2.
м2/м2.
Значение D должно быть не более 0,92
м2/м2.
Время движения людского
потока по первому участку пути вычисляется по формуле [18]:
 (12)
(12)
где l1 - длина первого участка пути,
м;- значение скорости движения людского потока по горизонтальному пути на
первом участке, м/мин.
Рассчитываем время движения людского
потока на первом участке пути, мин.
 мин.
мин.
Значение скорости v1 движения
людского потока на участках пути, следующих после первого, принимается в
зависимости от значения интенсивности qi движения людского потока по каждому из
участков пути (согласно [18]).
 , (13)
, (13)
Если полученное значение qi меньше
qмах то время движения по i-тому участку пути определяется по формуле [18]:
=li/vi (14)
где li - длина i-го участка пути,
м;- значение скорости движения людского потока по горизонтальному пути на i-том
участке, м/мин.
Для горизонтального пути qмах равно
16,5 м/мин.
Рассчитываем интенсивность движения
людского потока на втором участке пути, м/мин,
 м/мин.
м/мин.
Рассчитываем время движения людского
потока на втором участке пути:
 мин.
мин.
Рассчитываем время эвакуации людей:
 мин.
мин.
Допустимое время эвакуации из
производственного здания II степени огнестойкости с категорией производства В и
объемом помещения до 15 тыс. м3 составляет t = 1,25 мин. [18]. То есть, для
данного помещения расчетное время эвакуации не превышает необходимое. На
рисунке 5.1 представлен план эвакуации рабочего персонала.
Рисунок 4.1 - План эвакуации
рабочего персонала
Разработанные мероприятия по
улучшению условий труда диспетчера позволяют снизить тяжесть труда с четвертой
категории до третьей. Наиболее вероятной чрезвычайной ситуацией является пожар
в производственном здании. Предусмотрено применение средств пожаротушения,
пожарной техники и пожарная сигнализация, а также разработан план эвакуации
людей. Время эвакуации из диспетчерского пункта равно 0,07 мин. и не превышает
необходимое.
Заключение
В результате выполнения дипломного
проекта разработана система автоматизации процесса абсорбционной очистки
природного газа У372 Оренбургского газоперерабатывающего завода (АСУ ТП 1У372).
В ходе разработки проекта, выполнены
следующие этапы работ:
проведено предпроектное обследование
установки 1У372 и сбор исходных данных;
на основании анализа технологических
процессов выработаны решения направленные на обеспечение эффективности
внедряемой системы и снижение непроизводительных потерь;
определена структура и
функционирование программно-технического комплекса;
выбраны программные и технические
средства для реализации автоматизированной системы.
Использование современного
программно-технического комплекса I/A Series фирмы «Foxboro», системы
противоаварийной защиты TRIDENT, современных интеллектуальных контрольно -
измерительных приборов и исполнительных механизмов позволило создать систему с
высокими эксплуатационными характеристиками.
Практическая реализация данного
проекта позволит получить следующие результаты:
достижение высоких
технико-экономических показателей работы за счет поддержания наиболее
рационального режима работы технологического оборудования;
обеспечение надежной и эффективной
работы производственных объектов за счет повышения качества контроля и
оперативности управления режимами работы в соответствии с требованиями
технологических регламентов, своевременного обнаружения и устранения
отклонений;
выполнение установленных
производственных заданий по объемам и качеству товарной продукции;
снижение непроизводительных потерь
материально-технических, топливно-энергетических ресурсов и эксплуатационных
расходов, в том числе за счет рационального управления процессом регенерации
аминового сорбента;
увеличение длительности
межремонтного пробега технологического оборудования;
улучшение условий труда оперативного
технологического и диспетчерского персонала;
увеличение объема контролируемой
оперативной информации, повышение оперативности контроля и управления
(уменьшение запаздывания поступления оперативной информации и выдачи
управляющих воздействий).
Список использованных источников
ГОСТ
2.104-68. ЕСКД. Основные надписи.
ГОСТ
2.105-95. ЕСКД. Общие требования к текстовым документам.
ГОСТ
2.106-68. ЕСКД. Текстовые документы.
ГОСТ
2.304-81. ЕСКД. Шрифты чертежные.
ГОСТ
2.701-84. ЕСКД. Схемы. Виды и типы. Общие требования к выполнению.
ГОСТ
12.0.003-74. Опасные и вредные производственные факторы.
ГОСТ
19.701-90. Схемы алгоритмов, программ, данных и систем. Обозначения условные и
правила выполнения.
ГОСТ
27.002-83. Надежность в технике. Термины и определения.
ГОСТ
12.1.004-91 ССБТ «Пожарная безопасность. Общие требования».
РТМ
25.445-81, справочник «Надежность изделий электронной техники для устройств
народно-хозяйственного значения», ВНИИЭ, 1987 г.
Бусыгина
Н.В., Бусыгин И.Г. Технология переработки природного газа и газового
конденсата. - Оренбург: ИПК «Газпромпечать», 2002.
Временные
методические указания по определению коммерческой эффективности новой техники в
ОАО «Газпром». М.: 2001.
Горшков
А.В. Промышленные анализаторы АМЕТЕК на предприятиях СНГ. Химическое и
нефтегазовое машиностроение, №6, 1998, с 18-24.