Рычажный механизм
МИНИСТЕРСТВО
СЕЛЬСКОГО ХОЗЯЙСТВА РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО
ОБРАЗОВАНИЯ
УРАЛЬСКАЯ
ГОСУДАРСТВЕННАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ АКАДЕМИЯ
Кафедра
графики и деталей машин
ПОЯСНИТЕЛЬНАЯ
ЗАПИСКА
к курсовой
работе
по
теории механизмов и машин
Екатеринбург
2015 г.
1. Исходные данные
Схема механизма

Рис. 1
Дано:
ОА = 0,75 м;
АВ = 1,8 м;
у = 0 м;
ω = 9 с-1;
2.
Структурный
анализ рычажного механизма
Дана структурная схема механизма.
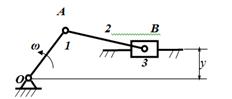
Рис. 2
Механизм предназначен для преобразования
вращательного движения кривошипа - 1 в возвратно-поступательное движение
ползуна 3.
2.1 Наименование звеньев
Таблица 2.1
- Звенья механизма
|
№
п/п Обознач. звена Название звена Вид дв-ния звена 0. О стойка неподвижная
ОА кривошип вращательное АВ шатун плоское В ползун поступательное
|
Вывод: Механизм кривошипно-ползунный. Число
подвижных звеньев n=3.
2.2. Кинематические пары и их
модификация
Таблица 2.2 - Кинематические пары механизма
|
Обозначение
К.П.
|
Звенья
составляющие К.П.
|
Вид
относительно движения в паре
|
Число
условных связей, (класс)
|
|
|
1
|
2
|
3
|
4
|
|
|
О
|
0-1
|
вращательное
|
5
(V кл.)
|
|
|
А
|
1-2
|
вращательное
|
5
(V кл.)
|
|
|
В
|
2-3
|
вращательное
|
5
(V кл.)
|
|
|
В
|
3-0
|
поступательное
|
5
(V кл.)
|
|
|
|
|
|
|
Вывод: Одноподвижных кинематических пар V кл. р5
= 4
2.3 Степень подвижности механизма
W = 3n - 2р5 = 3 ×
3 - 2 ×
4 = 1
где n = 3 - число подвижных звеньев; р5 = 4 -
число кинемат. пар V класса.
Вывод: так как W = 1, механизм имеет одно
ведущее звено - 1.
2.4 Разделение механизма на
структурные группы (группы Ассура)
Таблица 2.3 - Структурные группы механизма
|
Группа
|
Эскиз
группы
|
Звенья,
составляющие группу
|
Пары,
входящие в группу
|
Класс,
и вид группы
|
|
Ведущая
(нач. мех.)
|

|
0-1
|
вр.
|
1
кл.
|
|
2
группа Ассура
|
 2-3 2-3
|
2
кл. 2 вид
|
|
Вывод: механизм - 2-го класса.
2.5 Структурная формула механизма
(порядок сборки)
Структурная формула составляется, начиная
сведущего звена и присоединением последующих групп Ассура по порядку. Вывод:1
кл. (нач. мех.) ® 2 кл. 2в. (2-3). Механизм
последовательный.
3.
Построение
плана положений
Кривошип ОА вращается с постоянной скоростью w,
поэтому положение точки А известно для любого момента времени (любого угла
поворота звена ОА).
Дано: ОА = 0,75м; АВ = 1,8 м; у = 0 м;
Выбираем масштаб длин по формуле (1)
ml
=  =
=  = 0,03 м/мм
= 0,03 м/мм
Заполняем таблицу длин звеньев:
Таблица длин звеньев.
|
№
п/п
|
Название
и обозначение звена
|
Действительная
длина звена [м]
|
Длина
отрезка на чертеже [мм]
|
|
1
|
ОА
|
0,75
|
25
мм
|
|
2
|
АВ
|
1,8
|
60мм
|
|
3
|
у
|
0
|
0
мм
|
На чертеже произвольно выбирается точка О и от
нее строится направляющая ползуна В по размеру «у»;
Из точки О строится окружность
радиуса  - это
траектория движения точки А;
- это
траектория движения точки А;
Задаемся крайним положением
кривошипа (кривошип и шатун вытягиваются в одну линию).
Для точки В это происходит в двух
положениях:
мертвое положение: звенья ОА и АВ
вытянутся в одну линию.
 +
+  = 25 мм + 60 мм = 85 мм - правая
мертвая точка (ПМТ);
= 25 мм + 60 мм = 85 мм - правая
мертвая точка (ПМТ);
2 мертвое положение: звенья ОА и АВ
сложатся в одну линию
- ОА = 60мм - 25мм = 35 мм - левая
мертвая точка (ЛМТ).
Построим 1-е мертвое положение точки
В0:
Из точки О1 раствором циркуля 85мм
сделаем засечку на траектории движения точки В - получим ПМТ - В0.
Соединяем точки В0 и О, при этом на
окружности точки А образуются точка А0. Таким образом, построено положение
кривошипа ОА и шатуна АВ в крайнем мертвом положении.
. Делим окружность траектории
движения точки. А радиуса ОА на равные части, например на 6. Деление окружности
начинается от точки А0 по ходу вращения кривошипа, указанному в исходных
данных. Получаем точки А1, А2, А3, и т.д.;
.Затем строятся все точки В.Точка В,
принадлежащая ползуну, движется всегда вдоль направляющей, поэтому из точек
деления (А1, А2...) делаем засечки на траектории движения ползуна радиусом,
равным длине отрезка шатуна в масштабе -  .В результате получаем точки В1, В2
и т.д.
.В результате получаем точки В1, В2
и т.д.
Найденные положения точки В
определяют положение поршня (ползуна) на рабочем ходу - В1, В2, В3; на холостом
ходу - В4, В5. Соединив одноименные точки (А1 и В1, А2 и В2...) получим
положения шатуна АВ за один оборот кривошипа.
План положений механизма построен,
т.к. определены положения всех точек и звеньев механизма за один оборот
кривошипа (цикл механизма).
4. Построение
кинематических диаграмм для точки В
4.1 Построение
диаграммы перемещений «S - t»
звено рычажный механизм
скорость
Рассчитываем период вращения
кривошипа:
 ;
;
Для построения на чертеже выбираем
длину временной линии  =120 мм.
=120 мм.
Рассчитаем масштаб времени:
µt= ;
;
Масштаб перемещений µS возьмем
равным масштабу плана положений µl:
µS= µl=0,03 м/мм
Разделим временную линию на 6 частей
и обозначим номера положений кривошипа.
Размер перемещения ползуна в каждом
положении кривошипа будем замерять на плане положений механизма всегда от
крайней точки В0.. Затем переносить этот замер на диаграмму в соответствующем
положении и откладывать его по вертикали от временной линии.
Получившиеся точки соединим плавной
кривой и получим диаграмму перемещений «S - t».
4.2 Построение диаграммы скоростей
«V -t»
Построение выполняется методом графического
дифференцирования.
Межполюсное расстояние возьмём равное Н=40 мм.
Рассчитаем масштаб диаграммы скоростей:
 ;
;
5. Построение
планов скоростей
5.1 Размеры
звеньев механизма
ОА = 0,75 м; АВ = 1,8 м;
3. Угловая скорость ведущего звена ω = 9 с-1.
5.2 Виды
движений звеньев механизма
звено 0А (кривошип) - вращательное
движение;
звено АВ (шатун) - плоское движение;
звено В (ползун) - поступательное
движение.
5.3 Структурные
группы Асура
Механизм состоит из следующих
структурных групп:

Рис. 3
Составление уравнения скорости для группы Ассура
1кл.1вида.
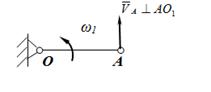
Рис. 4
Так как звено ОА совершает вращательное
движение, составляем уравнение скорости А по формуле:
 (1)
(1)
В данной группе Ассура известна
скорость точки О, которая равна нулю:
 .
.
Находим скорость вращения точки А
вокруг точки О1 -  , которая
перпендикулярна звену О1А (
, которая
перпендикулярна звену О1А ( ):
):

 .
.
Нахождение масштабного коэффициента
скоростей μV.
Производится по формуле (1):
 (6)
(6)
где: VА -
величина скорости (∙) А в м/сек;
рV а - отрезок, изображающий
скорость на чертеже в
мм.
Подбираем масштабный коэффициент
скорости μV
по
формуле (6):
 (7)
(7)
Построение векторного уравнения группы 1класса
1вида.
Построение векторного уравнения (1)производится
на чертеже, следующим образом.
Из произвольно выбранной точки РV
(полюса плана скоростей) строим вектор скорости , который на чертеже будет
изображаться отрезком РVа равным 60 мм.
Скоростьоткладывается
из (∙)РV, так как скорость точки  в уравнении (1) равна нулю.
в уравнении (1) равна нулю.
Отрезок (РV а) откладывается
перпендикулярно направлению звена ОА на плане положений - РVа  ОА, так как ОА. Таким образом, построен вектор
скорости
ОА, так как ОА. Таким образом, построен вектор
скорости
Конец вектора обозначаем
строчной буквой «а».
Составление векторных уравнений для
группы 2класса2вида.
В данной группе Ассура векторные
уравнения составляются для точки, являющейся внутренней парой группы - это (∙)В.
Уравнения составляются для звеньев:
шатуна АВ;
ползуна Д.

Рис. 5
Звено АВ совершает
плоскопараллельное движение и у него известна скорость точки А - , поэтому
составим векторное уравнение для скорости точки В по формуле:
 (2);
(2);
Ползун В совершает поступательное
прямолинейное движение и известна скорость направляющей ползуна - скорость
стойки  , поэтому
составим векторное уравнение для скорости точки В по формуле:
, поэтому
составим векторное уравнение для скорости точки В по формуле:
 (3);
(3);
Чтобы получить  необходимо
решить графически уравнения (2) и (3) совместно.
необходимо
решить графически уравнения (2) и (3) совместно.
Графическое решение уравнений для
группы 2класса 2вида.
Решение уравнения (2) начинаем от а
плана скоростей, согласно правилу сложения скоростей - правилу многоугольника.
Из (∙)а откладываем АВ - это
направление скорости  .
.
Решение уравнения (3) начинаем из РV, т.к.
скорость . Из РV
откладываем линию параллельную направляющей ползуна, т.к.  (рис.11).
(рис.11).
На пересечении перпендикуляра к
звену АВ и линии параллельной направляющей ползуна находится (∙)b плана
скоростей, а отрезок (РVb) - есть изображение скорости .
Определение абсолютных скоростей
точек механизма.
Абсолютные скорости точек на плане
скоростей изображаются отрезками между точкой полюса РV и соответствующей
буквой плана скоростей, например, РVа, РVb, и т.д.
Действительные величины абсолютных
скоростей определяются с помощью масштабного коэффициента скоростей по
формулам:
 ,
,
 ,
,
Отрезки (РVа), (РVb) берутся с плана
скоростей в миллиметрах.
Определение относительных скоростей
точек механизма.
Относительные скорости точек на
плане скоростей изображаются отрезками между точками плана скоростей:- скорость ;
;
Направление относительных скоростей
точек определяется от точки, обозначающей внешнюю пару группы Ассура к точке
обозначающей внутреннюю пару.
Действительная величина
относительных скоростей определяется по формулам:
 ,
,
Отрезок аb берётся с плана скоростей
в миллиметрах.
Определение угловых скоростей
звеньев.
Производится по следующим формулам:
при плоскопараллельном движении
звена
 .
.
|
Таблица
расчёта скоростей точек и звеньев механизма
|
|
Скорости
|
Размерность
|
Положения
механизма
|
|
|
0
|
1
|
2
|
3
|
4
|
5
|
|
Данные
для расчёта
|
|
|
|
|
|
|
|
|
ω
|
рад/сек
|
9
|
9
|
9
|
9
|
9
|
|
ОА
|
м
|
0,75
|
0,75
|
0,75
|
0,75
|
0,75
|
0,75
|
|
АВ
|
м
|
1,8
|
1,8
|
1,8
|
1,8
|
1,8
|
1,8
|
|
Pva
|
мм
|
32,17
|
32,17
|
32,2
|
32,2
|
32,2
|
32,17
|
|
Pvb
(замерить на плане скоростей для каждого положения мех-ма)
|
мм
|
0
|
63,57
|
40,4
|
0
|
40,4
|
63,57
|
|
ab
(замерить на плане скоростей для каждого положения мех-ма)
|
мм
|
|
|
|
|
|
|
|
Линейные,
абсолютные скорости точек
|
|
|
|
|
|
|
|
|
VA
= ω·OA
|
м/с
|
6,75
|
6,75
|
6,75
|
6,75
|
6,75
|
6,75
|
|
Расчёт
масштаба скоростей
|
|
|
|
|
|
|
|
|
µV
= VA/Pva
|
м/с/мм
|
0,21
|
0,21
|
0,21
|
0,21
|
0,21
|
0,21
|
|
VВ
=Pvb·µV
|
м/с
|
0
|
13,34
|
8,47
|
0
|
8,47
|
13,34
|
|
Относительная
скорость
|
|
|
|
|
|
|
|
|
VAВ=ab·µV
|
м/с
|
|
|
|
|
|
|
|
Угловая
скорость
|
|
|
|
|
|
|
|
|
ωАВ=VAB/AB
|
рад/сек
Похожие работы на - Рычажный механизм
|