Виконавчі пристрої слідкуючих приводів
Реферат
Виконавчі пристрої слідкуючих приводів
Виконавчий пристрій (ВП) -
пристрій, призначений для переміщення ОР у відповідності з заданим законом
управління.
ВП СП працюють в складних динамічних
режимах слідкування за сигналом розходження (рассогласования). Звідси витікають
специфічні вимоги до цих пристроїв:
– забезпечення
необхідних вихідних зусиль у всіх режимах роботи і здатність витримати
короткочасні перевантаження, що виникають у приводі;
– забезпечення
високих швидкостей і прискорень для переміщення ОР;
– плавне
регулювання в широких межах і забезпечення незалежності частоти обертання
вихідного влау від зміни навантаження (достатня жорсткість панічної
характеристики);
– відсутність
„самоходу” (тривалого обертання ротору при знятті сигналу управління(;
– мала
інерційність і здатність працювати в певних температурних діапазонах без
перегріву.
Окрім перерахованих вимог до ВП
пред’являються технічні вимоги:
– мала
маса і габарити;
– висока
надійність при механічних і кліматичних впливах.
У ВП в якості ВП застосовуються
електродвигуни постійного та змінного струму, електромагнітні пристрої (муфти,
перетворювачі, крокові двигуни), гідравлічні пристрої (гідротрансформатори,
гідроциліндри). Класифікація ВП представлена на рис. 1.
Для регулювання частоти обертання ВП
використовують два види управління неперервне та дискретне (імпульсне,
релейне).
Неперервне управління здійснюється з
допомогою змінного за значенням, але неперервного в часі сигналу; дискретне -
шляхом зміни часу, на протязі якого до ВП подається номінальна напруга.
За способом відпрацювання вихідного
валу ВП розділяють на пристрої з неперервним і дискретним відпрацюванням.
Надалі розглядатимуться основні характеристики, схеми і методи управління, які
забезпечують неперервне відпрацювання вихідного вала.
Вибір того чи іншого типу ВП
залежить від багатьох факторів і насамперед від характеру та значення
навантаження, що діє на ОР, і від параметрів руху вихідного валу, які
визначаються заданим законом руху.
Закони руху об’єктів регулювання
(ОР)
Закон руху вихідного вала і ОР
визначається законом зміни керуючої дії, який може носити заданий або
випадковий характер. Для виконання розрахунків використовують один з типових
законів руху ОР (рис. 2):
– гармонічний;
– з
постійною швидкістю;
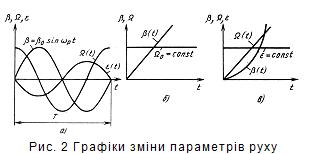
Гармонічна дія (рис 2, а) може
задаватися у вигляді гармонічної функції
|
 (1) (1)
|
|
де  - амплітуда
зміни вхідного сигналу;
- амплітуда
зміни вхідного сигналу;
 - робоча частота сигналу з періодом
- робоча частота сигналу з періодом
 ;
;
|
 (2) (2)
|
|
Визначивши першу та другу похідну
виразу (1):

 ,
,
визначаємо співвідношення, що
пов’язують амплітудні значення кута, швидкості в прискорення вихідного вала:
|
 ;(3) ;(3)
|
|
|
 .(4) .(4)
|
|
Частіше у вихідних даних на
проектування містяться відомості про граничні значення кутової швидкості  та
прискорення
та
прискорення  вихідного
вала. В цьому випадку еквівалентний гармонічний сигнал задають параметрами, які
повинні бути вибрані у відповідності з параметрами руху ОР і можуть бути
визначеними на основі виразів (3), (4):
вихідного
вала. В цьому випадку еквівалентний гармонічний сигнал задають параметрами, які
повинні бути вибрані у відповідності з параметрами руху ОР і можуть бути
визначеними на основі виразів (3), (4):
де і -
параметри, що відповідають режиму роботи СП з максимальним значенням швидкості
та прискорення.
Гармонічний вплив характерний для
систем стабілізації, що встановлюються на рухомій основі (кораблі, літаку), що
підлягає качці; для систем управління рулями літака і т.д.
Рух з постійною швидкістю  (рис. 2, б)
обумовлює лінійну зміну кута повороту
(рис. 2, б)
обумовлює лінійну зміну кута повороту  і характерний, наприклад для
приводу телескопа.
і характерний, наприклад для
приводу телескопа.
Рух з постійним прискоренням  (рис. 2, в)
типовий для режимів розгону і гальмування, визначає наступні закони зміни кута
повороту і швидкості:
(рис. 2, в)
типовий для режимів розгону і гальмування, визначає наступні закони зміни кута
повороту і швидкості:  ;
;  .
.
Задані закони руху можуть
бути відтворені СП тільки у випадку, коли енергетичні можливості ВП будуть
більші за потужність, що необхідна для переміщення ОР.
Навантаження
та енергетичні характеристики
Під навантаженням СП
розуміють суму збурюючи моментів , що діють на ОР:
слідкуючий привід
управління
|
 ,(8) ,(8)
|
|
де  - статичний
момент навантаження;
- статичний
момент навантаження;
 динамічний момент навантаження.
динамічний момент навантаження.
Статичний момент можна представити у
вигляді суми внутрішніх і зовнішніх складових, що діють в встановленому режимі.
(установившемя режиме):
|
 ,(9) ,(9)
|
|
де  - постійна
складова моменту навантаження, зумовлена дебалансом, моментом тертя в
кінематичних парах і контактних пристроях;
- постійна
складова моменту навантаження, зумовлена дебалансом, моментом тертя в
кінематичних парах і контактних пристроях;
 - змінний момент, що залежить від
параметрів руху ОР (кута повороту вихідного вала) або зовнішніх збурень (сили
вітру або віддачі).
- змінний момент, що залежить від
параметрів руху ОР (кута повороту вихідного вала) або зовнішніх збурень (сили
вітру або віддачі).
Під моментом розуміють
момент, що виникає в пружних елементах при закручуванні, або шарнірний момент  , що діє на
кермо літака при їх відхиленні і пропорційний куту відхилення
, що діє на
кермо літака при їх відхиленні і пропорційний куту відхилення  : де
: де  , де
, де  -
коефіцієнт шарнірного моменту.
-
коефіцієнт шарнірного моменту.
Динамічний момент обумовлений
тими складовими навантаження, котрі з’являються в режимі руху при зміні кутової
швидкості:
|
 ,(10) ,(10)
|
|
де  - момент
інерції навантаження;
- момент
інерції навантаження;
- прискорення вихідного вала.
З врахуванням (10) вираз (8)
збурюючого моменту набуває вигляду:
|
 .(11) .(11)
|
|

Складові навантаження, що
діють на ОР, прикладені до вала ВП через понижаючий редуктор  (рис. 3).
Знаючи передаточне число редуктора
(рис. 3).
Знаючи передаточне число редуктора  , зведемо вказані моменти до вала
ВП.
, зведемо вказані моменти до вала
ВП.
Приведений момент інерції
навантаження
|
 .(12) .(12)
|
|
де -
передаточне відношення редуктора.
Повний момент інерції
обертових частин навантаження з врахуванням моменту інерції двигуна 
|
 .(13) .(13)
|
|
Якщо момент інерції редуктора
 спів
розмірний з моментом інерції двигуна , то
спів
розмірний з моментом інерції двигуна , то  .
.
Приведений статичний момент
навантаження
|
 .(14) .(14)
Приведені кутові швидкості і
прискорення вала навантаження
|
 , ,  .(15) .(15)
|
|
Таки чином, приведений до валу ВП
моментнавантаження врахуванням (11) - (15)
|
 .(16) .(16)
|
|
Для забезпечення заданого режиму
роботи СП момент обертання ВП повинен дорівнювати мементу, визначеному з виразу
(16):
|
 .(17) .(17)
|
|
Одержаний момент називають
(на відміну від наявного момента) необхідним. Його позначають  і
використовують при виборі типу ВП. і
використовують при виборі типу ВП.

Про значення наявного моменту
при виборі ВП можна судити по механічній характеристиці, що виражає залежність  встановленої
швидкості валу ВП від моменту навантаження і сигналу керування (рис. 4).
Лінійна механічна характеристика (рис. 4, а) властива електродвигуну постійного
струму з незалежним збудженням і гідроприводу з об’ємним регулюванням;
параболічна характеристика (рис. 4, б) характерна гідроприводу з дросельним
регулюванням і нелінійна характеристика (рис. 4, в) - електромагнітній
порошковій муфті. За механічними характеристиками можна судити про регулювальні
властивості ВП. Оскільки в процесі регулювання момент навантаження непостійний,
то чим менше швидкість ВП буде залежати від моменту, тим кращі регулювальні
властивості пристрою. З цієї точки зору нелінійна характеристика (див. рис. 4,
в) є оптимальною і абсолютно жорсткою в певному діапазоні навантаження. В двох
інших випадках із збільшенням навантаження швидкість вихідного вала падає. встановленої
швидкості валу ВП від моменту навантаження і сигналу керування (рис. 4).
Лінійна механічна характеристика (рис. 4, а) властива електродвигуну постійного
струму з незалежним збудженням і гідроприводу з об’ємним регулюванням;
параболічна характеристика (рис. 4, б) характерна гідроприводу з дросельним
регулюванням і нелінійна характеристика (рис. 4, в) - електромагнітній
порошковій муфті. За механічними характеристиками можна судити про регулювальні
властивості ВП. Оскільки в процесі регулювання момент навантаження непостійний,
то чим менше швидкість ВП буде залежати від моменту, тим кращі регулювальні
властивості пристрою. З цієї точки зору нелінійна характеристика (див. рис. 4,
в) є оптимальною і абсолютно жорсткою в певному діапазоні навантаження. В двох
інших випадках із збільшенням навантаження швидкість вихідного вала падає.
З допомогою механічних
характеристик можна оцінити також енергетичні можливості ВП, тобто потужність,
яка в них наявна. Дійсно, потужність на валі ВП
 , ,
де  - момент і
швидкість ВП. - момент і
швидкість ВП.
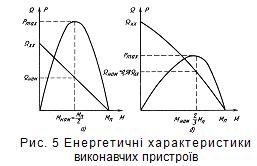
Знаючи механічну
характеристику (рис. 4, а), за значеннями  та та  можна побудувати енергетичну
характеристику можна побудувати енергетичну
характеристику  і визначити
максимальну потужність (рис. 5, б). Представлені на рис. 5 характеристики мають
максимум і визначити
максимальну потужність (рис. 5, б). Представлені на рис. 5 характеристики мають
максимум  в точках,
що визначають номінальні параметри ВП ( в точках,
що визначають номінальні параметри ВП ( ). Звідси номінальна потужність ВП ). Звідси номінальна потужність ВП  . .

При виборі ВП керуються ти
правилом, що його максимальна потужність повинна бути більшою за необхідну.
Іноді при виборі ВП для характеристики навантаження використовують діаграму
навантаження, що представляє залежність необхідних моментів  від
швидкості при заданому законі руху вихідного вала. При гармонічному збуренні
діаграма навантаження (рис. 6)
представляє собою еліпс з півосями від
швидкості при заданому законі руху вихідного вала. При гармонічному збуренні
діаграма навантаження (рис. 6)
представляє собою еліпс з півосями  . Основна умова при виборі ВП
полягає в тому, щоб діаграма навантаження розміщувалась всередині області
моментів і швидкостей, обумовлених механічною характеристикою . Основна умова при виборі ВП
полягає в тому, щоб діаграма навантаження розміщувалась всередині області
моментів і швидкостей, обумовлених механічною характеристикою  ,
доторкалась останньої в точці ,
доторкалась останньої в точці  з максимальним значенням потужності
при з максимальним значенням потужності
при  . .
Електричні
виконавчі пристрої
В якості електричних ВП
використовуються регульовані електродвигуни постійного і змінного струму, а
також нерегульовані електродвигуни в поєднанні з керованими електромагнітними
муфтами. Кожний з перерахованих типів пристроїв володіє певними перевагами і
недоліками, що необхідно враховувати при виборі області їх застосування.
Електричні двигуни постійного струму.
Розгляд електродвигунів як елементів системи управління проводиться в
передбачені, що принцип їх дії і конструкція відомі х курів електричних машин і
елементів автоматики.
В СП застосовують в основному колекторні
двигуни постійного струму з незалежним збудженням серій МИ, ДИ, П, СЛ, СД, Д і
з збудженням від постійного магніту серій ДПР, ДПМ, ДП, МИГ, МРМ, ПЯ. Внаслідок
особливої конструкції якоря електродвигуни серій ДПР (з порожнім немагнітним
якорем), МИГ (з циліндричним гладким якорем), МРМ і ПЯ (з дисковим друкованим
якорем), що відрізняються високою швидкодією, знаходять застосування в
малопотужних СП постійного струму.
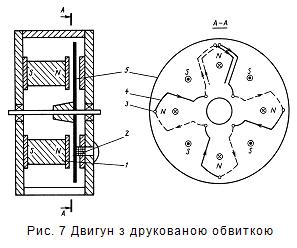
Особливо необхідно виділити двигуни
з дисковим якорем і друкованою обвиткою серій МРМ і ПЯ. ЯК видно з рис. 7, ці
двигуни виконуються не з циліндричним повітряним зазором, а з плоским. На обох
сторонах якоря 5, що є тонким немагнітним диском, друкованим способом нанесені
плоскі обвитки 4, з’єднані між собою гальванічні заклепками 3. Потік збудження
створюється магнітами 1. Роль колектора виконують неізольовані ділянки
провідників, по яких безпосередньо ковзають срібно-графітові щітки Це спрощує
виготовлення двигунів і забезпечує без іскрову комутацію.
Одержання роторних обвиток
методом друкованого монтажу порад із спрощенням технології виготовлення
двигунів дозволяє знизити момент інерції ротора. Завдяки вказаній властивості
ці двигуни володіють постійними часу, на порядок меншими, ніж у двигунів
звичайного виконання, і допускають прискорення до  . .
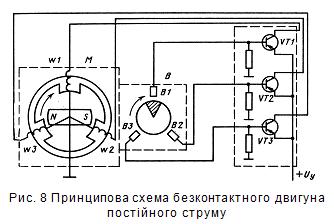
Підвищення вимог до
надійності і питомої потужності ВП привело до створення безконтактних двигунів
постійного струму, що характеризуються відсутністю механічних ковзаючи контактів.
В безконтактному двигуні (рис. 8) комутація секцій  обмотки, що
розташована на статорі двигуна обмотки, що
розташована на статорі двигуна  , здійснюється транзисторними
ключами , здійснюється транзисторними
ключами  комутатора
за сигналами давача положення комутатора
за сигналами давача положення  ротора. В положення, вказаному на
рис. 8, сигнал з чутливого елемента ротора. В положення, вказаному на
рис. 8, сигнал з чутливого елемента  , що знаходиться в полі управляючого
магніту (на рисункові заштрихований), жорстко зв’язаного з ротором, відкриває
ключ , що знаходиться в полі управляючого
магніту (на рисункові заштрихований), жорстко зв’язаного з ротором, відкриває
ключ  . Виводи
обмотки . Виводи
обмотки  виявляються
підключеними до джерела живлення виявляються
підключеними до джерела живлення  . Протікаючи по обмотці, струм
створює магнітний потік, який взаємодіє з полем постійного магніту, і ротор
обертається за годинниковою стрілкою. Ключ закривається, обмотка знеструмлюється,
але одночасно з’являється сигнал з елемента . Протікаючи по обмотці, струм
створює магнітний потік, який взаємодіє з полем постійного магніту, і ротор
обертається за годинниковою стрілкою. Ключ закривається, обмотка знеструмлюється,
але одночасно з’являється сигнал з елемента  , до якого підійде магніт, і
відкривається ключ , до якого підійде магніт, і
відкривається ключ  і т.д. і т.д.
Розглянутий безконтактний
двигун за принципом роботи є аналогом колекторного двигуна завдяки наявності
позиційного ЗЗ, що здійснюється здавачем положення ротора. Але застосування
напівпровідникового комутатора покращує умови комутації і відкриває нові
можливості побудови схем управління і регулювання частоти обертання
безконтактного двигуна порівняно з колекторними двигунами.
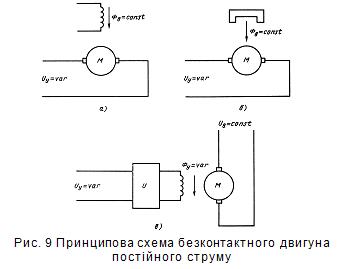
Управління ВД постійного
струму здійснюється подачею регульованої напруги на обмотку якоря (рис. 9, а) -
якірне керування або на обмотку збудження - полюсне управління. ВД з збудженням
від постійного магніту має тільки якірне керування (рис 9, б).
При полюсному управлінні
(рис. 9, в) на обмотку якоря постійно подається номінальна напруга  від
незалежного джерела живлення. Управління частотою обертання ВД здійснюється за
рахунок зміни напруги управління на затискачах обмотки головних
полюсів. Зміна напрямку потоку від
незалежного джерела живлення. Управління частотою обертання ВД здійснюється за
рахунок зміни напруги управління на затискачах обмотки головних
полюсів. Зміна напрямку потоку  в обмотці керування (управління)
відбувається з допомогою перетворювача в обмотці керування (управління)
відбувається з допомогою перетворювача  , в якості якого застосовують
генератори, електромашинні підсилювачі, реверсори (ключові підсилювачі). Але
оскільки при управління по ланцюгу збудження не можна забезпечити необхідних
пускових якостей і достатньої жорсткості механічної характеристики в широкому
діапазоні регулювання, то це управління застосовують рідко. , в якості якого застосовують
генератори, електромашинні підсилювачі, реверсори (ключові підсилювачі). Але
оскільки при управління по ланцюгу збудження не можна забезпечити необхідних
пускових якостей і достатньої жорсткості механічної характеристики в широкому
діапазоні регулювання, то це управління застосовують рідко.
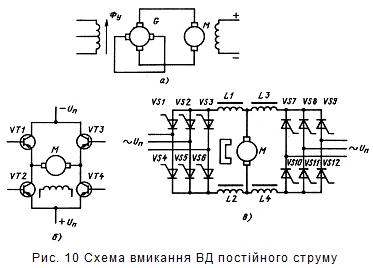
При управлінні по ланцюгу
якоря (див. рис. 9, а) сигнал управління надходить на якірну обмотку ВД с
підсилювача потужності, в якості якого використовують електронні,
електромашинні та тиристорні підсилювачі (рис. 10).
З допомогою схеми ЭМУ-ИД (рис.
10, а) здійснюється
неперервне регулювання швидкості двигуна . Оскільки обмотки управління ЭМУ
ввімкнені диференціально, то при відсутності сигналу розходження різницевий
магнітний потік управління  , ЭМУ не збуджений і двигун
перебуває в стані спокою. Виникнення різницевого потоку призводить до появи
вихідної напруги ЭМУ і
обертанню ВД в бік, що визначається знаком розходження, зі швидкістю, що
залежить від значення помилки розходження. , ЭМУ не збуджений і двигун
перебуває в стані спокою. Виникнення різницевого потоку призводить до появи
вихідної напруги ЭМУ і
обертанню ВД в бік, що визначається знаком розходження, зі швидкістю, що
залежить від значення помилки розходження.
Схема мостового вихідного
каскаду на транзисторах (рис. 10, б) з ввімкненим в діагональ ВД дозволяє
здійснювати як неперервне, так і дискретне управління в залежності від режиму
роботи транзисторів. При неперервному способі транзистори працюють в лінійному
режимі. У вихідному стані схеми транзистори закриті і якір двигуна знеструмлений.
При подачі вхідного сигналу визначеного знаку відкриваються транзистори
протилежних плечей, наприклад та  , і по
ланцюгу , і по
ланцюгу  --якір -- --якір -- почне
протікати струм, що створює момент обертання певного напрямку. При розходженні
протилежного знаку відкриваються транзистори та почне
протікати струм, що створює момент обертання певного напрямку. При розходженні
протилежного знаку відкриваються транзистори та  і обертання
ВД здійснюється в протилежний бік. Схема застосовується для управління
двигунами потужністю до і обертання
ВД здійснюється в протилежний бік. Схема застосовується для управління
двигунами потужністю до  , що
зумовлене великими тепловими втратами, пов’язаними з неперервним режимом роботи
транзисторів. , що
зумовлене великими тепловими втратами, пов’язаними з неперервним режимом роботи
транзисторів.
Імпульсний метод регулювання
дозволяє забезпечити режим роботи транзисторів і підвищити потужність вихідного
каскаду до декількох кіловат. В цьому випадку схема, що розглядалась, працює в
режимі перемикання, видаючи на ВП серію імпульсів, тривалість яких залежить від
сигналу розходження. При дії імпульсу двигун розганяється, в його відсутність -
гальмується. Вал ВД набуває середньої швидкості, що залежить від відношення
тривалостей імпульсу і паузи. Для усунення коливань швидкості (одержання
неперервного обертання вала) частоту перемикань роблять чим більшою. При цьому
двигун як інерційний елемент виконує роль відновлювача неперервного сигналу за
його дискретним значенням. Імпульсне регулювання забезпечує нормальний тепловий
режим роботи ВД, оскільки він нагрівається тільки під час тривалості імпульсу.
Мостова схема на тиристорах
(рис. 10, в) дозволяє здійснювати дискретне регулювання швидкості ВД при
комутації струмів до декількох сотень ампер і напруги до тисячі вольт. Для
забезпечення обертання ВД в один бік управляючі імпульси з виходу підсилювача
подаються на одну із тиристорних груп, Наприклад  - - . Струм від додатної фази напруги
живлення . Струм від додатної фази напруги
живлення  замикається
через ввімкнений в цей момент тиристор групи замикається
через ввімкнений в цей момент тиристор групи  -, якір двигуна, тиристор групи - -, якір двигуна, тиристор групи - на від’ємну
фазу напруги живлення. Регулювання частоти обертання ВД забезпечується за
рахунок зміни часу вмикання тиристорів, тобто часу підключення двигуна до
джерела струму. Реверс ВД здійснюється подачею керуючих імпульсів на тиристори на від’ємну
фазу напруги живлення. Регулювання частоти обертання ВД забезпечується за
рахунок зміни часу вмикання тиристорів, тобто часу підключення двигуна до
джерела струму. Реверс ВД здійснюється подачею керуючих імпульсів на тиристори  - - іншої
групи. Схеми застосовують для управління ВД потужністю до іншої
групи. Схеми застосовують для управління ВД потужністю до  . .
Основні
параметри та характеристики ВД пстійного струму. Момент, що
розвивається двигуном при подачі напруги управління, визначається струмом, який
протікає в ланцюгові якоря:
|
 ,(18) ,(18)
|
|
де  -
коефіцієнт моменту, -
коефіцієнт моменту,  ; ;
 - струм, що протікає по ланцюгові
якоря, - струм, що протікає по ланцюгові
якоря,  . .
Кутову швидкість якоря ВД у
встановленому режимі знаходять з рівняння електричної рівноваги
|
 ,(19) ,(19)
|
|
де  - активний
опір ланцюга якоря, - активний
опір ланцюга якоря,  ; ;
 - противоЕРС, - противоЕРС,  , ; , ;
 - коефіцієнт противоЕРС, - коефіцієнт противоЕРС,  . .
Звідси
|
 .(20) .(20)
|
|
Основними характеристиками ВД
постійного струму є механічна  і регулювальні - за швидкістю і регулювальні - за швидкістю  і по
моменту і по
моменту  . .
Вираз механічної
характеристики можна одержати підстановкою значення з (19) в
(20):
|
 .(21) .(21)
|
|
Позначивши
|
 ;(22) ;(22)
|
|
|
 ,(23) ,(23)
|
|
Одержуємо
|
 ,(24) ,(24)
|
|
де  - момент
пуску двигуна при - момент
пуску двигуна при  ; ;
 - коефіцієнт демферування, що
визначає нахил (жорсткість) механічної характеристики. - коефіцієнт демферування, що
визначає нахил (жорсткість) механічної характеристики.
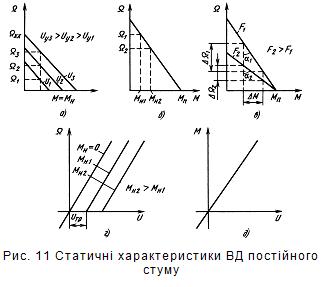
Як витікає з рисунка розгляду
механічних характеристик, представлених на рис. 11, із збільшенням напруги
управління швидкість
ВД зростає (рис. 11, а), при збільшенні моменту навантаження швидкість
падає (рис. 11, б), із збільшенням коефіцієнта демферування (рис. 11,
в) зростає стійкість двигуна, оскільки зменшується залежність кутової швидкості
від зменшення зовнішнього навантаження.
Механічна характеристика є
узагальненою, оскільки залежить від двох параметрів та . Вираз
регулювальної характеристики  може бути одержаним з (21): може бути одержаним з (21):
 . .
Позначивши
|
 .(25) .(25)
|
|
і зробивши заміну  , де , де  - приведена
складова моменту навантаження, одержуємо - приведена
складова моменту навантаження, одержуємо
|
 ,(26) ,(26)
|
|
де  -
коефіцієнт передачі двигуна по швидкості, -
коефіцієнт передачі двигуна по швидкості,  ; ;
Регулювальні характеристики
(рис. 11, г) зміщені відносно початку координат на відстань, що визначається
моментом . Через
початок координат характеристика проходить при умові моменту навантаженні на
валі ВД (ідеальний випадок). Реально навіть при відсутності моменту
навантаження завжди існує момент статичного тертя  , який
визначає зону нечутливості ВД (напруга рушання) і впливає на статичну помилку всього
СП. Напруга рушання , який
визначає зону нечутливості ВД (напруга рушання) і впливає на статичну помилку всього
СП. Напруга рушання
|
 .(27) .(27)
|
|
Регулювальна характеристика
по моменту  при при  представлена
на рис. 11, д. представлена
на рис. 11, д.
Динамічні
властивості двигунів. Поведінка двигуна в перехідних
режимах, пов’язаних із зміною кутової швидкості в процесі слідкування, можна
описати наступною системою рівнянь:
1) рівняння електричної
рівноваги
|
|
де  -
індуктивність обмотки якоря,
-
індуктивність обмотки якоря,  ;
;
) рівняння механічної
рівноваги у відповідності до (17), а також (13) і (14) та при врахування
постійної складової статичного навантаження 
|
 .(29) .(29)
|
|
3) рівняння, що пов’язує кут
повороту вала ВД з кутовою швидкістю:
|
 .(30) .(30)
|
|
В оперативній формі рівняння (28) -
(30) при урахуванні (18) можна представити наступним чином:
Структурні схеми ВД постійного
струму, що відповідають одержаній системі рівнянь (31) - (33), зображені на
рис. 12, а.
Розв’язуючи разом рівняння (31) -
(33), одержуємо:

або
|
 ,(34) ,(34)
|
|
де  -
електромагнітна складова часу, яка характеризує швидкість наростання моменту в
загальмованому двигуні,
-
електромагнітна складова часу, яка характеризує швидкість наростання моменту в
загальмованому двигуні,  ;
;
 - механічна постійна часу, яка
характеризує зростанняшвидкості і визначається механічними параметрами ВД:
- механічна постійна часу, яка
характеризує зростанняшвидкості і визначається механічними параметрами ВД:
|
 .(35) .(35)
|
|

Для двигунів зі звичайним
зубцевим якорем  , при
порожньому немагнітному якорі
, при
порожньому немагнітному якорі  , для двигунів з циліндричним
гладким і печатним якорем
, для двигунів з циліндричним
гладким і печатним якорем  .
.
Структурна схема ВД, що
відповідає виразу (34), представлена на рис. 12, б.
Передаточну функцію двигуна
по керуючій дії можна одержати з виразу (34), вважаючи  (рис. 13,
а):
(рис. 13,
а):
|
 .(36) .(36)
|
|
В залежності від
співвідношення постійних часу і двигун може бути представлений
різними типовими ланками. З невеликою похибкою (рис. 13, б) передаточну функцію
ВД можна записати у вигляді:
|
 .(37) .(37)
|
|
Для більшості ВД вплив індуктивності
якірної обмотки на динамічні властивості не є визначальними, що дає можливість
знехтувати електромагнітною постійною часу (рис. 13, в), тоді
|
 .(38) .(38)
|
|

Якщо в якості вихідної
величини розглядати кут  повороту
вала ВД, то на підставі (33) двигун можна представити послідовним з’єднанням
інтегруючої і аперіодичної ланок (рис. 13. г):
повороту
вала ВД, то на підставі (33) двигун можна представити послідовним з’єднанням
інтегруючої і аперіодичної ланок (рис. 13. г):
|
 .(39) .(39)
|
|
І, на кінець, при незначних
навантаженнях падінням напруги можна знехтувати. В цьому випадку ВД виконує
роль інтегруючої ланки (рис. 13, д):
|
 .(40) .(40)
|
|
Передаточна функція двигуна
по відношенню до збурюючої дії при  може бути одержана із (34):
може бути одержана із (34):
|
 .(41) .(41)
|
|
Вирази передаточних функцій по
управляючій та збурюючій дії відповідають структурній схемі ВД (рис. 13, е),
одержаній еквівалентними структурними перетвореннями (див. рис. 13, б-г)
вихідної схеми (див. рис. 13, а).
Великий діапазон потужностей (від
долі ват до десятків кіловат), лінійність статичних характеристик, плавність
роботи наряду з високими динамічними характеристиками стали причиною широкого
застосування ВД постійного струму в якості виконавчих пристроїв СП. Головний
недолік двигунів постійного струму обумовлений наявністю колектора і щіток, що
створюють момент тертя, який знижує надійність роботи в умовах підвищеної
вологості, ускладнює технічне обслуговування і підвищує рівень шуму при роботі.
Електричні
двигуни змінного струму. З числа двигунів змінного струму
для роботи в СП найпридатніші мало інерційні асинхронні двигуни з хорошими
регулювальними характеристиками. Широке застосування знаходять двохфазні
двигуни типу ДИД, АД, АДП, малогабаритні типу ДМ, а також двигуни-генератори
типу ДГ, АДЕ, ДГМ.
Такі переваги, як відсутність колектора
і щіток, малий момент інерції, простота управління і узгодження з підсилювачами
змінного струму, роблять асинхронні двигуни незамінними в швидкодіючих СП, а
також приводах, що працюють у вибухонебезпечних умовах, в яких важко поводити
профілактичні роботи. Малі розміри двигунів дають можливість використання їх в
пристроях, до яких пред’являються жорсткі вимоги щодо габаритів і масі. Окрім
того, ці двигуни найпростіші та економічні.
Проте розповсюдження
асинхронних двигуні обмежене їх низьким ККД і малою потужністю (до  ), оскільки
подальше збільшення потужності тягне за собою значний ріст габаритів і вимагає
інтенсивного охолодження.
), оскільки
подальше збільшення потужності тягне за собою значний ріст габаритів і вимагає
інтенсивного охолодження.
Розглянемо принцип роботи
асинхронного двигуна. В одну з обмоток статора ввімкнено конденсатор, що
створює необхідний для роботи двигуна зсув фаз на  між
струмами в обмотках управління збудження. Обертове магнітне поле, що
утворюється при цьому, взаємодіє з вихровими струмами, які індукуються в
немагнітному роторі, і створює момент обертання
між
струмами в обмотках управління збудження. Обертове магнітне поле, що
утворюється при цьому, взаємодіє з вихровими струмами, які індукуються в
немагнітному роторі, і створює момент обертання
|
 .(42) .(42)
|
|
де  -
коефіцієнт пропорційності;
-
коефіцієнт пропорційності;
 - напруга збудження і управління, ;
- напруга збудження і управління, ;
 - кут зсуву фаз між напругами.
- кут зсуву фаз між напругами.
При відсутності навантаження ротор
обертається синхронно з полем. При наявності навантаження з’являється
відставання, тому двигун і називається асинхронним.
Розрізняють методи неперервного і
дискретно управління частотою обертання асинхронного ВД. Неперервне управління
частотою досягається зміною амплітуди управляючої напруги, дискретне - зміною
часу підключення обмоток ВД до джерела живлення.
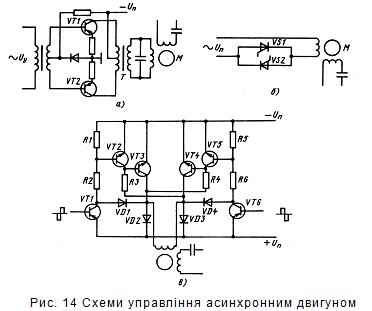
Неперервний метод управління
може бути реалізованим за допомогою схем з використанням електронних
підсилювачів змінного струму. Схема регулювання асинхронного двигуна з
допомогою транзисторного підсилювача, виконаного на транзисторах і , показана
на рис. 14, а. При відсутності вхідного сигналу у первинній обмотці
трансформатора  протікають
початкові колекторі струми, що створюють ефект компенсації в навантажені, в результаті
чого двигун знаходиться у стані спокою. При подачі вхідного сигналу , що
надходить на бази транзисторів в протифазі, колекторний струм одного
транзистора зростає, а іншого зменшується. В сердечнику з’являється
різницевий магнітний потік певного напрямку, а у вихідній обмотці - напруга
відповідної фази. Двигун починає обертатися з частотою, що визначається
амплітудою вхідного сигналу. Для реверса ВД фазу вхідного сигналу слід змінити
на
протікають
початкові колекторі струми, що створюють ефект компенсації в навантажені, в результаті
чого двигун знаходиться у стані спокою. При подачі вхідного сигналу , що
надходить на бази транзисторів в протифазі, колекторний струм одного
транзистора зростає, а іншого зменшується. В сердечнику з’являється
різницевий магнітний потік певного напрямку, а у вихідній обмотці - напруга
відповідної фази. Двигун починає обертатися з частотою, що визначається
амплітудою вхідного сигналу. Для реверса ВД фазу вхідного сигналу слід змінити
на  .
.
Дискретний метод управління
асинхронним ВД можна пояснити з допомогою схеми управління на тиристорах (рис.
14, б). В обмотку управління двигуна ввімкнені зустрічно-паралельно два
тиристори ,  , на керуючі
електроди яких зі схеми управління надходять імпульси. При відсутності сигналу
розузгодження тиристори закриті і обмотка управління ВД знеструмлена. При наявності
сигналу помилки на тиристори надходять імпульси, зсунуті по фазі відносно
напруги живлення на кут, що
залежить від степені розузгодження. В результаті проводячий тиристор, наприклад
, буде
відкритим не весь час, що дорівнює половині періоду, а тільки його частину, і
обмотка управління ВД на такий же час буде підключена до джерела живлення. У
другий півперіод відкривається тиристор . І по обмотці управління протікає
імпульс струму зворотної полярності. Середній за період струм залежить від
ширини імпульсів (фазового зсуву імпульсів) і в кінцевому рахунку від помилки
розузгодження. Частота обертання ВД при цьому буде плавно змінюватися. Реверс
ВД здійснюється одночасною зміною фази вхідного сигналу і подачею дозволяючого
імпульсу на тиристор .
, на керуючі
електроди яких зі схеми управління надходять імпульси. При відсутності сигналу
розузгодження тиристори закриті і обмотка управління ВД знеструмлена. При наявності
сигналу помилки на тиристори надходять імпульси, зсунуті по фазі відносно
напруги живлення на кут, що
залежить від степені розузгодження. В результаті проводячий тиристор, наприклад
, буде
відкритим не весь час, що дорівнює половині періоду, а тільки його частину, і
обмотка управління ВД на такий же час буде підключена до джерела живлення. У
другий півперіод відкривається тиристор . І по обмотці управління протікає
імпульс струму зворотної полярності. Середній за період струм залежить від
ширини імпульсів (фазового зсуву імпульсів) і в кінцевому рахунку від помилки
розузгодження. Частота обертання ВД при цьому буде плавно змінюватися. Реверс
ВД здійснюється одночасною зміною фази вхідного сигналу і подачею дозволяючого
імпульсу на тиристор .
В даний час розроблені силові
ВД, в яких використовуються трифазні асинхронні двигуни з тиристорним
управлінням.
Іншим прикладом дискретного
управління може служити управління з допомогою мостового вихідного каскаду на
транзисторах у ключовому режимі (рис. 14, в). Двоє нижніх печей мосту утворені
вхідними транзисторами ,  . Двоє
верхніх плечей утворені силовими транзисторами , і додатковими ,
. Двоє
верхніх плечей утворені силовими транзисторами , і додатковими ,  , що мають
провідність, зворотну провідності транзисторів нижньої половини мосту.
Колекторне навантаження кожного з управляючих транзисторів виконана з
резисторного подільника
, що мають
провідність, зворотну провідності транзисторів нижньої половини мосту.
Колекторне навантаження кожного з управляючих транзисторів виконана з
резисторного подільника  ,
,  (
( ,
,  ), до
середньої точки якого підключена база додаткового транзистора (). Колектор
транзистора ()
підключений до бази силового транзистора () безпосередньо і через резистор
), до
середньої точки якого підключена база додаткового транзистора (). Колектор
транзистора ()
підключений до бази силового транзистора () безпосередньо і через резистор  (
( ) до
колектора іншого силового транзистора ().
) до
колектора іншого силового транзистора ().
Джерело живлення ввімкнуте в
діагональ мосту, в іншу діагональ ввімкнене навантаження у вигляді обмотки
управління ВД і два діоди  і
і  , призначені
для забезпечення режиму роботи каскаду. Управління мостом здійснюється
двополярними імпульсами, що надходять в протифазі на бази транзисторів , , наприклад,
від’ємний імпульс - на базу і додатній імпульс - на базу .
Транзистори , , на час дії
імпульсу відкриті, а транзистори , , закриті. По ланцюгу - - - обмотка
управління - - тече струм,
і двигун починає обертатися в певному напрямку. В інший півперіод змінюється
полярність імпульсів, відкриваються транзистори , , , а транзистори , , закриваються.
Струм через навантаження потече у зворотному напрямку ланцюгом - - - обмотка
управління - - . При цьому
напрямок обертання ВД залишається попереднім, оскільки одночасно зміниться фаза
напруги збудження. Частота обертанна ВД буде залежати від ширини імпульсів
управління або значення помилки рзузгодження. Знак сигналу рзузгодження
визначає фазу управляючих імпульсів і напрямок обертання ВД.
, призначені
для забезпечення режиму роботи каскаду. Управління мостом здійснюється
двополярними імпульсами, що надходять в протифазі на бази транзисторів , , наприклад,
від’ємний імпульс - на базу і додатній імпульс - на базу .
Транзистори , , на час дії
імпульсу відкриті, а транзистори , , закриті. По ланцюгу - - - обмотка
управління - - тече струм,
і двигун починає обертатися в певному напрямку. В інший півперіод змінюється
полярність імпульсів, відкриваються транзистори , , , а транзистори , , закриваються.
Струм через навантаження потече у зворотному напрямку ланцюгом - - - обмотка
управління - - . При цьому
напрямок обертання ВД залишається попереднім, оскільки одночасно зміниться фаза
напруги збудження. Частота обертанна ВД буде залежати від ширини імпульсів
управління або значення помилки рзузгодження. Знак сигналу рзузгодження
визначає фазу управляючих імпульсів і напрямок обертання ВД.
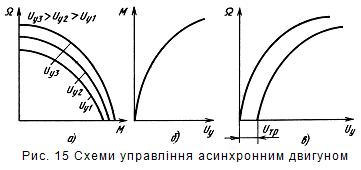
Сатичними характеристиками
асинхронного двигуна, як і двигуна постійного струму, є механічні  (рис. 15,
а) і регулювальні
(рис. 15,
а) і регулювальні  ,
,  (рис. 15,
б) характеристики. В момент вмикання ВД завдяки застосуванню фазозсуваючого
конденсатора кут
(рис. 15,
б) характеристики. В момент вмикання ВД завдяки застосуванню фазозсуваючого
конденсатора кут  , і пусковий
момент з врахуванням напруги збудження буде
, і пусковий
момент з врахуванням напруги збудження буде
|
 .(43) .(43)
|
|
де  -
коефіцієнт передачі по моменту,
-
коефіцієнт передачі по моменту,  ,
,  .
.
Із (43) випливає
|
 .(44) .(44)
|
|
де  -
номінальний пусковий момент;
-
номінальний пусковий момент;
 - номінальна напруга управління.
- номінальна напруга управління.
Залежність  називається
навантажувальною характеристикою. В загальному вигляді статичні характеристики
асинхронного двигуна нелінійні, але з деяким припущенням їх можна замінити
приблизними лінійними залежностями. Вважаючи механічні характеристики лінійними
і паралельними, залежність між кутовою швидкістю ВД і моментом обертання можна
виразити лінійним рівнянням
називається
навантажувальною характеристикою. В загальному вигляді статичні характеристики
асинхронного двигуна нелінійні, але з деяким припущенням їх можна замінити
приблизними лінійними залежностями. Вважаючи механічні характеристики лінійними
і паралельними, залежність між кутовою швидкістю ВД і моментом обертання можна
виразити лінійним рівнянням
|
 (45) (45)
|
|
або
|
.(46)
|
|
Коефіцієнт демпфірування
визначаємо з (46) при умові  ,
,  ,
,  :
:
|
 .(47) .(47)
|
|
Рівняння регулювальної
характеристики може бути одрержаним з виразу (45) при умові  :
:
|
 .(48) .(48)
|
|
Позначивши  , де -
коефіцієнт передачі ВД по швидкості, одержуємо
, де -
коефіцієнт передачі ВД по швидкості, одержуємо
|
 .(49) .(49)
|
|
В динамічному режимі
асинхронний двигун з врахуванням допущеної лінеаризації описується тими ж
диференціальними рівняннями (31) - (33), що і двигун постійного струму. При
дослідженні рівнянь і виводі виразу передаточної функції член, що містить  , без
значних похибок може бути відкинутий і тоді
, без
значних похибок може бути відкинутий і тоді
|
Механічна складова асинхронних
ВД, за звичай, вказується в паспортних даних. В противному випадку її можна
визначити за параметрами двигуна і навантаження:
|
 .(51) .(51)
|
|
де  .
.
Слід мати на увазі, що на ВД
змінного струму надходить управляючий сигнал, модульований по амплітуді і
містить корисну інформацію в згинаючій, на яку і реагує двигун. Тому
передаточну функцію асинхронного ВД визначають за огинаючою управляючого
сигналу.
Електромагнітні муфти.
На відміну від електродвигунів електромагнітні муфти обертового моменту не
створюють і є передаточною ланкою між нерегульованим приводним двигуном і
навантаженням. Конструктивно вони складаються з ведучої частини, що пов’язана з
двигуном, і веденої, пов’язаної з навантаженням. За типом зв’язку між обома
частинами муфти ділять на муфти з механічним зв’язком і електромагнітним (за
рахунок поля).
Муфтою з
механічним зв’язком називається пристрій, в якому
обертовий момент, що створюється приводним двигуном, передається від ведучої
частини до веденої за рахунок механічного тертя або шляхом зачеплення,
керованого магнітним молем електромагніта муфти.
За принципом роботи
електромагнітні муфти з механічним зв’язком ділять на фрикційні (ЕФМ) і
порошкові (ЕПМ). В ЕФМ передача моменту відбувається за рахунок механічного
тертя дисків, які притягуються при подачі управляючого сигналу, в ЕПМ - за
рахунок щеплення феромагнітного порошку в полі, що управляється.

Найбільшого застосування в СП
набули порошкові муфти завдяки хорошим регулювальним властивостям і високій
швидкодії. Вони універсальні, з їх допомогою можна здійснювати як неперервне,
та і дискретну регулювання моменту.
По виконанню муфти бувають
контактні і безконтактні. Одна із конструкцій безконтактної муфти показана на
рис. 16, а. Магнітна система складається із елемента  , що є
ведучою частиною муфти, елемента
, що є
ведучою частиною муфти, елемента  , який утворює ведену частину, і
обмотки
, який утворює ведену частину, і
обмотки  , розміщеної
в кільцевому пазові катушкотримача
, розміщеної
в кільцевому пазові катушкотримача  . Двійний зазор
. Двійний зазор  і
і  заповнений
феромагнітним порошком - виконавчим органом ЕПМ, який безпосередньо здійснює
силовий зв’язок між ведучою і веденою частинами.
заповнений
феромагнітним порошком - виконавчим органом ЕПМ, який безпосередньо здійснює
силовий зв’язок між ведучою і веденою частинами.
Ведена частина виконана у
вигляді стакана і має малий момент інерції. Ведучу частину, що обертається з
постійною швидкістю разом з валом приводного двигуна, навпаки, роблять великою
за розмірами і масою. Це сприяє запасу механічної енергії від двигуна,
прискоренню процесів розгону і гальмування, тобто безінерційності самої муфти.
При відсутності сигналу
управління магнітний порошок знаходиться у вільному стані, щеплення відсутнє і
обертання не передається. При подачі в обмотку електромагніту сигналу
управління виникає потік управління . Під дією потоку порошок
намагнічується і твердне, створюючи між ведучою і веденою частинами моменту
щеплення  , де
, де  -
коефіцієнт пропорційності. Ведена частина починає обертатися, причому момент,
який передається, залежить від струму управління.
-
коефіцієнт пропорційності. Ведена частина починає обертатися, причому момент,
який передається, залежить від струму управління.
Здійснювати реверс
навантаження з допомогою розглянутої муфти не можна, оскільки в якості
приводного двигуна, як було зазначено раніше, застосовується нерегульований
двигун. Для забезпечення реверсу навантаження  служить блок двох паралельно
з’єднаних муфт , (рис. 16,
б), пов’язаних з приводним двигуном з допомогою зубчастої передачі таким
чином, що ведучі частини цих муфт обертаються в протилежні сторони. Для
управління обмотки обох муфт включають по диференціальній схемі як навантаження
вихідного каскаду підсилювача, зібраного на транзисторах , і
працюючого в лінійному або ключовому режимі залежно від вибраного методу
регулювання швидкості ВП. При відсутності сигналу розузгодження і неперервному
регулюванні початкові (нульові) струми, що протікають в обмотках муфт,
створюють рівні, але протилежно направлені моменти обертання, що прикладені до
вихідного валу ВП. В результаті
служить блок двох паралельно
з’єднаних муфт , (рис. 16,
б), пов’язаних з приводним двигуном з допомогою зубчастої передачі таким
чином, що ведучі частини цих муфт обертаються в протилежні сторони. Для
управління обмотки обох муфт включають по диференціальній схемі як навантаження
вихідного каскаду підсилювача, зібраного на транзисторах , і
працюючого в лінійному або ключовому режимі залежно від вибраного методу
регулювання швидкості ВП. При відсутності сигналу розузгодження і неперервному
регулюванні початкові (нульові) струми, що протікають в обмотках муфт,
створюють рівні, але протилежно направлені моменти обертання, що прикладені до
вихідного валу ВП. В результаті  . Поява сигналу розузгодження
. Поява сигналу розузгодження  призводить
до перерозподілу струмів
призводить
до перерозподілу струмів  та
та  в обмотках
муфт, появі моменту і швидкості вихідної ланки муфти певного знаку.
в обмотках
муфт, появі моменту і швидкості вихідної ланки муфти певного знаку.
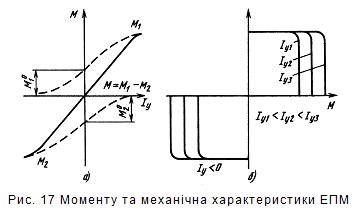
Властивості муфти в
статичному режимі визначаються моментною  і механічною
і механічною  характеристиками.
Моментна (регулювальна) характеристика реверсивної муфти, показана на рис. 17,
а суцільною лінією, є різницею характеристик
(штрихові лінії) двох нереверсивних муфт. Характеристика кожної муфти
нелінійна, але за рахунок диференціальної схеми вмикання при струмі управління
характеристиками.
Моментна (регулювальна) характеристика реверсивної муфти, показана на рис. 17,
а суцільною лінією, є різницею характеристик
(штрихові лінії) двох нереверсивних муфт. Характеристика кожної муфти
нелінійна, але за рахунок диференціальної схеми вмикання при струмі управління  момент
момент  теж
дорівнює нулю, а при зміні струму управління він буде зростати практично
лінійно:
теж
дорівнює нулю, а при зміні струму управління він буде зростати практично
лінійно:  або
або
|
 ,(52) ,(52)
|
|
де  і
і  -
коефіцієнти ЕПМ по моменту,
-
коефіцієнти ЕПМ по моменту,  ;
;
 - опір обмотки управління.
- опір обмотки управління.
Ведена частина синхронно обертається
з ведучою. При навантаженні ЕПМ моментом, більшим за момент муфти, між ведучою
і веденою частинами з’являється ковзання, яке визначається залежністю
 ,
,
де  - кутова
швидкість ведучої частини;
- кутова
швидкість ведучої частини;
 - кутова швидкість вихідного валу
веденої частини.
- кутова швидкість вихідного валу
веденої частини.
Момент, що розвиває ЕПМ при
ковзанні, менший моменту що передається і називається моментом обертання. При  ЕПМ є
навантаженням для приводного двигуна і джерелом потужності для механізму, що
приводиться. При
ЕПМ є
навантаженням для приводного двигуна і джерелом потужності для механізму, що
приводиться. При  муфта є
пасивним з’єднувальним механізмом. Швидкість можна регулювати тільки шляхом зміни
ковзання
муфта є
пасивним з’єднувальним механізмом. Швидкість можна регулювати тільки шляхом зміни
ковзання  .
.
Ковзання супроводжується
виділенням великої кількості тепла. Для підвищення теплопровідності муфти і
запобіганню руйнування феромагнітного порошку в нього додають мінеральні масла,
гас, графіт, які збільшують в’язкість суміші.
Як витікає з розгляду
механічної характеристики (рис. 17,
б) кутова швидкість вихідного
валу ЕПМ не залежить від моменту навантаження при роботі муфти без ковзання.
При деякому значенні моменту
навантаження відбувається миттєве розчеплення ведучої і веденої частин. Чим
більший сигнал управління. Ти при більшому значенні моменту навантаження
відбудеться розщеплення муфти.
Для виводу передаточної
функції блоку муфт скористаємося рівнянням механічної рівноваги (29), звівши
всі параметри до вихідного валу ЕПМ:
|
 ,(53) ,(53)
|
|
де  -
приведений до вихідного валу момент інерції;
-
приведений до вихідного валу момент інерції;
 - момент інерції муфт;
- момент інерції муфт;
 - момент, що передається муфтою;
- момент, що передається муфтою;
- передаточне число редуктора від
веденої частини ЕПМ до навантаження;
- момент сил опору на вихідному
валі муфт.
Підставляючи значення
моменту, що передається, з (52) та (53) і приймаючи для спрощення , одержуємо
 ,
,
звідки передаточна функція
блоку муфт
 або
або  ,
,
де
|
 .(54) .(54)
|
|
Передаточна функція муфт відносно
кута повороту
 .
.
Якщо врахувати швидкість
зростання сумарного магнітного потоку  в робочому зазорі, що залежить від
постійної часу , то
передаточна функція муфти
в робочому зазорі, що залежить від
постійної часу , то
передаточна функція муфти
|
 ,(55) ,(55)
|
|
де  ;
;  , -
індуктивність і опір обмотки управління.
, -
індуктивність і опір обмотки управління.
До переваг ЕПМ
необхідно віднести:
– високе
значення відношення обертового моменту до моменту інерції веденої частини
муфти, що забезпечує велике прискорення - до  (у двигунів постійного струму такої
ж потужності - до
(у двигунів постійного струму такої
ж потужності - до  ;
;
– малу
потужність управління за рахунок високої магнітної провідності виконавчого
органу і, яка наслідок, велике зусилля по потужності;
– лінійну
залежність моменту, що передається, до сигналу управління;
– високу швидкодію
– можливість
застосування простих, дешевих і надійних в роботі нерегульованих двигунів.
Недоліками
муфт є:
– складність
конструкції механічних вузлів муфт;
– значний
нагрів виконавчого органу муфт при ковзанні і необхідність в спеціальних
заходах щодо охолодження;
– нестабільність
моменту, що передається, внаслідок непостійності магнітних властивостей
порошку;
– невисокий
ККД, обумовлений непродуктивними витратами енергії на обертання приводного
двигуна при відсутності сигналу управління  ;
;
– невелика
частота обертання.
Порядок вибору та розрахунку
електричних виконавчих пристроїв
Вибір і
розрахунок електродвигунів. Електродвигуни відносяться до
числа елементів СП, що випускаються промисловістю у вигляді ряду стандартних
серій з певними номінальними даними: потужністю, частотою обертання, моментом. Співвідношення
пускового моменту і кутових
швидкостей  в двигунів
різних серій різне, тому електродвигун вибирають не за моментом або швидкістю,
а за максимальною потужністю. Цей вибір приблизний, оскільки з наявної серії
двигунів вибирають той, який з найменшою похибкою забезпечує необхідну
швидкість і
прискорення навантаження,
а далі перевіряють його на перевантаження і нагрів. Для спрощення задачі вибір
ВД і оцінку його придатності з енергетичної точки зору поведемо, вважаючи, що
середня потужність двигуна не перевищує потужності, яка допустима по нагріву.
в двигунів
різних серій різне, тому електродвигун вибирають не за моментом або швидкістю,
а за максимальною потужністю. Цей вибір приблизний, оскільки з наявної серії
двигунів вибирають той, який з найменшою похибкою забезпечує необхідну
швидкість і
прискорення навантаження,
а далі перевіряють його на перевантаження і нагрів. Для спрощення задачі вибір
ВД і оцінку його придатності з енергетичної точки зору поведемо, вважаючи, що
середня потужність двигуна не перевищує потужності, яка допустима по нагріву.
Необхідну потужність двигуна
(в кіловатах) визначають за формулою
|
 ,(56) ,(56)
|
|
де  -
необхідний момент,
-
необхідний момент,  ;
;
згідно (23)
|
 ,(57) ,(57)
|
|
- задана
максимальна кутова швидкість обертання навантаження,  ;
;
 - ККД редуктора,
- ККД редуктора,  .
.

Складність розрахунку
необхідного моменту полягає в залежності від передаточного числа редуктора,
котре на даному етапі ще не розраховане. Графік залежності  при
постійному значенні прискорення
при
постійному значенні прискорення  і графік залежності
і графік залежності  при
постійному необхідному моменті
при
постійному необхідному моменті  , побудовані згідно виразу (57) для
двигуна
, побудовані згідно виразу (57) для
двигуна  при заданих
параметрах навантаження
при заданих
параметрах навантаження  ;
;  ,
представлені на рис. 18. Як видно з графіків, існує оптимальне передаточне число
,
представлені на рис. 18. Як видно з графіків, існує оптимальне передаточне число
 редуктора,
при якому для створення певного прискорення необхідний найменший момент і,
навпаки, при одному і тому ж двигун розвиває на валу максимальне
прискорення. Для визначення необхідно взяти похідну по від функції
(57) і, розв’язавши рівняння виду
редуктора,
при якому для створення певного прискорення необхідний найменший момент і,
навпаки, при одному і тому ж двигун розвиває на валу максимальне
прискорення. Для визначення необхідно взяти похідну по від функції
(57) і, розв’язавши рівняння виду  , знайти вираз оптимально
передаточного числа редуктора
, знайти вираз оптимально
передаточного числа редуктора
|
 ,(58) ,(58)
|
|
Підставивши вираз з (57) і із (58) у
формулу (56), визначимо потужність ВД, необхідну для переміщення навантаження з
необхідною швидкістю і прискоренням:
|
 ,(59) ,(59)
У відповідності із знайденим
значенням потужності підбираємо по каталогу тип двигуна, керуючись наступними
міркуваннями:
1. Якщо розрахована
потужність менша  , то двигун
вибирають з числа малопотужних асинхронних двигунів типу АДП, ДИД, ДГ (див.
табл. П1 - П3 дод.) або двигунів постійного струму ДПР, МЯ, ПЯ, П (див. табл.
П10 дод.). , то двигун
вибирають з числа малопотужних асинхронних двигунів типу АДП, ДИД, ДГ (див.
табл. П1 - П3 дод.) або двигунів постійного струму ДПР, МЯ, ПЯ, П (див. табл.
П10 дод.).
. При потужності
більшій за  необхідно
вибирати двигуни постійного струму МИ, СЛ, ДПМ, ДИ (див. табл. П4, П11, П12
дод.). необхідно
вибирати двигуни постійного струму МИ, СЛ, ДПМ, ДИ (див. табл. П4, П11, П12
дод.).
. Потужність вибраного
двигуна повинна бути рівною або дещо більшою розрахованої необхідної
потужності: 
По каталогу знаходять основні
номінальні дані двигуна, необхідні для розрахунку передаточних функцій ВД та
інших елементів:  -
номінальну потужність, -
номінальну потужність,  ; ;  -
номінальну частоту обертання двигуна, -
номінальну частоту обертання двигуна,  ; ;  - номінальний момент обертання, ; - момент
інерції двигуна, - номінальний момент обертання, ; - момент
інерції двигуна,  ; - напругу
управління, ; ; - напругу
управління, ;  - струм
якоря, - струм
якоря,  ; ;  - постійну
часу, - постійну
часу,  . .
За одержаним значенням
моменту інерції двигуна ,
підставивши його у вираз (59), визначають оптимальне передаточне число
редуктора . Цим
завершується попередній вибір ВД.
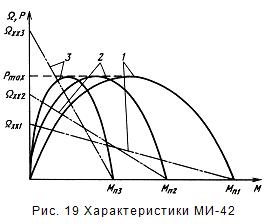
Остаточний вибір двигуна
включає його перевірку на виконання вимог за заданим прискоренням і швидкості
переміщення навантаження, оскільки двигуни однакової потужності володіють
різними запасами по швидкості та прискоренню. На рис. 19. представлені
механічні (штрихпунктирні лінії) і енергетичні (суцільні лінії) характеристики  трьох
різних двигунів, що розвивають однакові максимальні потужності. Враховуючи, що
прискорення переміщення і момент двигуна однозначно пов’язані залежністю трьох
різних двигунів, що розвивають однакові максимальні потужності. Враховуючи, що
прискорення переміщення і момент двигуна однозначно пов’язані залежністю  , про
прискорення можна судити по значенню пускового моменту , а про швидкість
- по значенню . Очевидно,
що перший двигун має значний запас по прискоренню, але мінімальний запас по
швидкості, оскільки , про
прискорення можна судити по значенню пускового моменту , а про швидкість
- по значенню . Очевидно,
що перший двигун має значний запас по прискоренню, але мінімальний запас по
швидкості, оскільки  . Третій
двигун, навпаки, має великий запас по швидкості і мінімальний по прискоренню. І
можливий випадок, коли тільки другий двигун буде спроможний забезпечити
необхідні швидкість та прискорення. . Третій
двигун, навпаки, має великий запас по швидкості і мінімальний по прискоренню. І
можливий випадок, коли тільки другий двигун буде спроможний забезпечити
необхідні швидкість та прискорення.
Перевірку ВД по швидкості і
моменту (прискоренню) проведемо з умови рівності номінальної та необхідної
потужностей:
 , ,
де  ; ;  або або

Одержана рівність виконується
в трьох випадках.
1.  ; ;  . .
Такий випадок можливий, проте
малоймовірний.
|
 ; ;  .(60) .(60)
|
|
Випадок, коли виконується вимога по
заданій швидкості, характерний для двигунів постійного струму. З врахуванням
того, що у двигунів номінальний момент приблизно в 2 рази менший пускового
моменту, вибраний двигун рахується придатним по моменту, якщо виконується
умова:
|
 ;(61) ;(61)
|
|
|
 .(62) .(62)
|
|
В противному випадку двигун
необхідно змінити на більш потужний.
|
3.  ; ;  .(63) .(63)
|
|
Випадок, коли виконується умова по
моменту (прискоренню), характерний для двигунів змінного струму. Очевидно, якщо
двигун, що має запас потужності, не задовольняє вимозі по швидкості, то,
змінюючи передаточне число редуктора, можна узгодити співвідношення між
необхідною і наявною потужностями. Нове передаточне число можна визначити з
виразу
|
 .(64) .(64)
|
|
Якщо при знайденому значенні виконується
умова (61), то вибір ВД можна рахувати закінченим, оскільки цей двигун
задовольняє обидві умови по забезпеченню неохідних швидкості і прискорення
вихідного валу. В противному випадку необхідно вибрати інший двигун.
Таки чином, вибір ВД по
заданих максимальним значенням швидкості і прискорення зводиться до виконання
наступних трьох етапів:
– використовуючи
вираз (56), підраховуємо потужність ВД, необхідну для подолання моменту
навантаження, і по каталогу визначаємо тип двигуна;
– знаходять
оптимальне передаточне число редуктора за формулою (64);
– перевіряють
вибраний двигун на виконання вимог по швидкості і прискоренню згідно (60) -
(63).
Вибір
і розрахунок ЕПМ. Розрахунок виконавчого пристрою з ЕПМ є
складною задачею і часто зводиться до створення нової конструкції муфти, що
визначається спеціальними вимогами. В цьому випадку проводиться розрахунок
конструктивних параметрів, магнітної системи і обмотки управління муфти.
Для підвищення надійності та
технологічності конструкцій муфт промисловістю розроблена і випускається серія
безконтактних муфт серій БПМ і МБП з моментами, що передаються,  і з
частотою обертання ведучої частини і з
частотою обертання ведучої частини  . Це полегшує розрахунок і зводить
його до підбору муфти за потужністю, вибору привідного двигуна і розрахунку
передаточного числа редуктора. . Це полегшує розрахунок і зводить
його до підбору муфти за потужністю, вибору привідного двигуна і розрахунку
передаточного числа редуктора.
При розрахунку ЕПМ муфту слід
розглянути як трансформатор потужності (механічної)  на виході
муфти в потужність на виході
муфти в потужність  на її
виході (рис. 20) при дотримані умов на її
виході (рис. 20) при дотримані умов  , ,  , ,  . .
Силовий редуктор в приводі з
ЕПМ, як видно з рис. 20, складається із ступені від приводного двигуна ПД до
муфти з передаточним числом

|
 .(65) .(65)
|
|
і ступені від муфти до
навантаження  з
передаточним числом з
передаточним числом
|
 .(66) .(66)
|
|
Загальне передаточне число
|
 .(67) .(67)
|
|
При виборі приводного двигуна
необхідно керуватися наступними міркуваннями:
– номінальна
частота обертання двигуна повинна бути вибрана з таким розрахунком, щоб частота
обертання муфти з врахуванням  не перевищувала ; не перевищувала ;
– двигун слід
вибирати з числа нерегульованих надійних і дешевих двигунів з жорсткою
характеристикою. Цим вимогам задовольняють асинхронні трифазні двигуни серій 4А
та ДАТ;
– необхідну
потужність двигуна (в кіловатах) визначають за формулою
|
 ,(68) ,(68)
|
|
де -
необхідний момент,  , ; , ;
 - знаходять в паспортних даних
муфти; - знаходять в паспортних даних
муфти;
– потужність
приводного двигуна повинна бути більшою або дорівнювати необхідній потужності.
Література
1. Инжиниринг электроприводов и
систем автоматизации. - Москва: Академия, 2006. - 368 c.
. Гопал, К. Дюбей Основные
принципы устройства электроприводов / Гопал К. Дюбей. - М.: Техносфера, 2009. -
480 c.
. Попков, С.А. Основы следящего
электропривода / С.А. Попков. - М.: РГГУ, 2015. - 363 c.
. Попов, А. Н. Основы
электромеханики асинхронного частотного электропривода / А.Н. Попов. - Москва:
ЛКИ, 2007. - 264 c.
. Преображенский, В.И. Выбор полупроводниковых
вентилей для электроприводов / В.И. Преображенский. - М.: Высшая школа, 2000. -
289 c.
Похожие работы на - Виконавчі пристрої слідкуючих приводів
|