(t) - сигнал
на входе нуль-компаратора НК; tm - положение максимума. t1 - результат
временной привязки. б) устройство временной привязки с дифференцирующим звеном
ДЗ и нуль-компаратором
Метод
фиксации максимума (рис. 2.2) представляет идеальное решение максимум представляет
собой предел в области бесконечно малых приближений, неосуществимых
практически. Это замечание справедливо и по отношению к методу производной
(рис. 2.3), в котором максимум сигнала отмечается в момент времени,
соответствующий нулю его производной. На практике широко применяется метод
пересечения нуля (рис. 2.4), представляющий собой «отступление» от метода нуля
производной тем, что «дифференцирование» сигнала осуществляется путем его
пропускания через дифференцирующее звено (дифцепочку) с ненулевой постоянной
времени, а также тем, что продифференцированный сигнал сравнивается в общем
случае с ненулевым порогом срабатывания компаратора [14].
В
результате возникает ошибка фиксации максимума
Dtm = t1 - tm. Обычно эта ошибка не превышает 2-5 нс,
однако при значительных перегрузках приемного тракта форма сигнала сильно
искажается и эта ошибка может существенно возрастать. Для устранения этого
недостатка вводят автоматическую регулировку усиления принятого сигнала.
Методы
повышения точности временной фиксации массива накопленной информации
Метод
накопления дает не только энергетический выигрыш, но и повышение точности
измерений. Благодаря этому возможно и желательно устанавливать длительность
зондирующего импульса в несколько раз больше длительности периода дискретизации
ИВИ. Согласно известному техническому решению, временная привязка накопленного
массива данных осуществляется как проекция на временную ось точки пересечения
касательных к переднему и заднему «фронтам» накопленного массива (рис. 2.5)
[14,16].
Анализ показал недостаточную эффективность подобных
методов обработки результатов накопления. Во-первых, как видно из рисунка 2.5,
«фронты» массива не поддаются точной интерпретации и положение касательных к
ним устанавливается неоднозначно. Во-вторых, форма огибающей массива
существенно зависит от величины сигнала. В результате временная привязка по
этому методу имеет значительный разброс.
Рисунок 2.5 Метод временной привязки накопленного
массива методом касательных при отношении сигнал/шум = 1
Эти недостатки устранены методом временной привязки массива данных путем
определения положения его первого начального момента (центра тяжести),
вычисляемого по выражению: [6,16]
 з = {(j-p) + ¾¾¾¾¾¾¾ } DT , (2.1)
з = {(j-p) + ¾¾¾¾¾¾¾ } DT , (2.1)

Где j - номер временной дискреты, в
которой накопленная сумма максимальна;
K(a) - накопленная сумма в (a)-й дискрете;
k(a) - весовой коэффициент (a)-й дискреты; при неизвестном
априорно положении сигнала можно принять k(a) = 1;
m = tфр/DT - количество дискрет, соответствующих длительности переднего
фронта лазерного импульса;
tфр -
длительность переднего фронта лазерного импульса;
q = tи/DT - количество дискрет, соответствующих длительности импульса;
tи -
длительность лазерного импульса;
р - поправочное число, характеризующее точку временной привязки сигнала;
DT -
длительность дискреты.
Указанный метод поддерживает высокую точность временной привязки не
только в линейном диапазоне входного сигнала, но и при значительных перегрузках.
.1.2 Метод
некогерентного накопления
Задача о накоплении формулируется так: диапазон измеряемых дальностей DR разбивается на m равных интервалов Δr= DR/m; все интервалы
считаются статистически независимыми и рассматриваются как каналы дальности,
где проводится обработка (накопление) локационной информации; считается, что
измеряемый сигнал находится в одном из таких каналов (j-м канале). Для получения результата измерения проводится N зондирований дальности. На выходе
приемника существует смесь сигнала амплитудой S и шума с эффективным значением σ. При i-м зондировании аналоговая информация с выхода приемника
преобразуется в цифровую путем одноуровневого порогового квантования (ОПК) или
многоуровневого порогового квантования (МПК) сигнала.
ОПК называется бинарным: i-му сигналу j-го канала дальности присваивается
значение kij=0, если
£Uj0
=å kji (i=1…N)
Если Kj>Kj0 - порогового уровня, то принимается решение, что дальность
до цели определяется j-м каналом дальности и равна:
=j×Δr+R0
где R0 - начало диапазона измеряемых дальностей.
Компьютерное моделирование приемного тракта с накоплением
Была разработана компьютерная модель приемного тракта с накоплением.
Модель использует метод Монте-Карло и построена на базе ПО MATLAB 7.0. На выходе линейного тракта
присутствует случайный процесс, представляющий сумму сигнала и шума. Одна из
таких реализаций показана на рисунке 2.6. Сигнал характеризуется относительной
амплитудой S, задаваемой в уровнях эффективного
значения шума σ и представляющей отношение сигнал/шум. Программный параметр
А связан с S соотношением А = 1,85 S. На рисунке S = 1. На рисунках 2.7 и 2.8 приведены результаты
компьютерного моделирования двухпорогового накопителя при вышеприведенных
условиях и количестве циклов накопления (объеме накопления) N = 200. Индекс
внизу показывает положение центра тяжести полученных массивов.
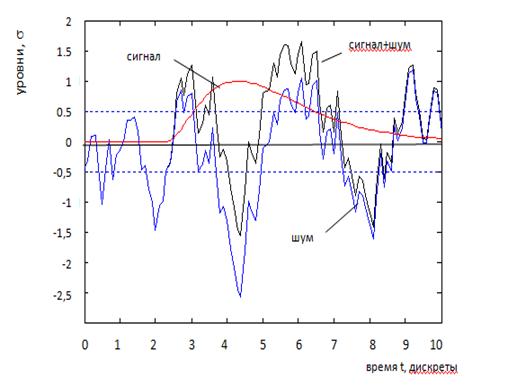
Рисунок 2.6 Реализация случайного процесса сигнал + шум на входе
двухуровневого порогового устройства. Пороговые уровни +0,5 и -0,5 показаны
пунктиром. Отношение сигнал/шум S = 1
Результаты моделирования накопителя

Рисунок 2.7 Реализация результатов накопления при
объеме накопления N = 200 и отношении сигнал/шум на входе S = 1. Рассчитанная дальность R = 205 м. Результат измерения R* = 204,8 м.
Рисунок 2.8 Реализация результатов накопления при
объеме накопления N = 200 и отношении сигнал/шум на входе S = 10 . Рассчитанная дальность R = 5 м. Результат измерения R* = 5,0 м
Данные рисунка 2.7 получены для отношения сигнал/шум
на входе накопителя S/N = 1, а результаты на рисунке 2.8 -
для S/N =10. При дальнейшем увеличении S/N оценка
временного положения сигнала несколько смещается влево к первоначальному
значению. Как видно, при таком построении накопителя и алгоритме оценки
временного положения сигнала по центру тяжести накопленного массива разброс
результатов измерения дальности в неограниченном амплитудном диапазоне сигналов
не превышает 20% от величины дискреты ИВИ. Для рассмотренного примера это
соответствует 0,2 м, что является систематической ошибкой, устраняемой на малых
дистанциях введением поправки.
Несмотря на столь малый разброс оценки дальности при
накоплении, существуют способы его дальнейшего уменьшения. Это возможно
благодаря введению поправки в зависимости от количества переполненных ячеек
накопителя [3, 5, 6] или суммы накопленных сумм в ячейках, соседних с центром
тяжести накопленного массива [3]. Тогда погрешность оценки дальности может быть
снижена до 10% от величины дискреты и менее.
2.1.3
Оптимальный по точности и помехозащищенности метод определения скорости
Оптимальный алгоритм измерения скорости
При наличии ряда измерений дальности можно предложить процедуру измерения
скорости цели путем определения коэффициента rху линии регрессии у = rху х + b
(рис. 2.9) [4].

Рисунок 2.9 Определение скорости как коэффициента рху регрессии ряда
измерений у(х)
При
этом дисперсия оценки рху минимальна, если она оптимизирована по методу
наименьших квадратов. В общем случае при произвольных моментах времени  измерения
дальностей
измерения
дальностей  и объеме
серии измерений n оценка скорости
и объеме
серии измерений n оценка скорости  ,
оптимальная в смысле наименьших квадратов, определяется выражением [14],
справедливым для значений V* от 0 до 5 м/с и выше.
,
оптимальная в смысле наименьших квадратов, определяется выражением [14],
справедливым для значений V* от 0 до 5 м/с и выше.

 (2.4)
(2.4)
В
частности, для равноотстоящих отсчетов Ri с периодом ΔТ:

 (2.5)
(2.5)
или,
после упрощений,
 (2.6)
(2.6)
При
этом среднеквадратическая погрешность оценки скорости [11]:
 (2.7)
(2.7)
где
 -
среднеквадратическая ошибка измерения дальности в каждом из замеров.
-
среднеквадратическая ошибка измерения дальности в каждом из замеров.
В
частности:

 (2.8)
(2.8)
В таблице 2.1 приведены результаты расчетов для нескольких режимов
накопления.
Выбор оптимального режима накопления зависит от полетной задачи ЛА,
высоты и режима пилотирования.
Таблица 2.1 Результаты расчетов ошибки измерения скорости sV при sR ~ 0,41 DR=2.4 м
|
Частота обновления, 1/с
|
Время накопления DТ, с
|
Объем накопления, n
|
Ошибка измерения скорости sV, м/с
|
|
50
|
0,02
|
160
|
41
|
|
10
|
0,1
|
800
|
3,7
|
|
2
|
0,5
|
4000
|
0,33
|
|
1
|
1
|
8000
|
0,12
|
Примечание Расчеты sV
проведены по формуле (2.7)
Выбор оптимального режима накопления зависит от полетной задачи ЛА,
высоты и режима пилотирования.
Необходимо
указать, что в процедурах определения скорости все измерения должны быть
достоверными. Любой ложный отсчет дальности или пропуск измерения ( = 0)
приведет к грубому искажению результата измерения скорости. Поэтому при
разработке алгоритма вычисления должны быть приняты меры по исключению
недостоверных замеров дальности, например, путем исключения замеров,
отличающихся от средней оценки скорости для каждой дальности на величину,
превышающую 3.
= 0)
приведет к грубому искажению результата измерения скорости. Поэтому при
разработке алгоритма вычисления должны быть приняты меры по исключению
недостоверных замеров дальности, например, путем исключения замеров,
отличающихся от средней оценки скорости для каждой дальности на величину,
превышающую 3.
Следовательно,
оптимальный по среднеквадратическому отклонению алгоритм измерения скорости
обеспечивает возможность измерения скорости в заданных пределах от 0 м/с до 5
м/с и выше. Ошибка измерения скорости может быть уменьшена до приемлемых
значений при увеличении времени накопления до 0,5-1 с; при этом частота
обновления данных о скорости может быть той же, что и в режиме измерения высоты
- для этого алгоритм вычисления скорости должен предусматривать сдвиг интервала
накопления с каждым заданным периодом обновления, заданная погрешность 0,2 м/с
обеспечивается при времени накопления DТ = 1 с.
2.2 Работа в
ближней зоне и методы сокращения минимальной измеряемой дальности
Аппаратная функция и теневая зона
При повышенных требованиях к минимальной измеряемой дальности лазерного
дальномера возникает задача формирования его аппаратной функции
(геометрического фактора) [6] таким образом, чтобы протяженность теневой зоны
не превышала заданной минимальной дальности [6]. Схема формирования типовой
аппаратной функции лазерного дальномера с разнесенными передающим и приемным
каналами приведена на рисунке 2.10.
Аппаратная функция А(R)
характеризует степень перекрытия полей излучающего и приемного каналов и
изменяется в ближней зоне диапазона дальностей от 0 до 1.
В теневой зоне А(R) =
0, поэтому проведение измерений дальности в этой зоне невозможно. Обычно при
построении дальномера по приведенной выше схеме теневая зона дальномера R0 составляет 2-20 м в зависимости от
взаимной конфигурации и оптических характеристик излучающего и приемного
каналов.
Величина R1 практически не
влияет на характеристики дальномера в ближней зоне, а R0 определяет минимальную измеряемую дальность, которая не
может быть меньше этой величины. Для уменьшения минимального измеряемого
расстояния высотомером ДЛ-5 до 0,5 м достаточно на внешнюю поверхность
объектива передающего канала со стороны оправки приклеить пластинку из
молочного стекла типа МС21 размером 7х3х0,3 мм.
Рисунок 2.10 Схема формирования аппаратной функции: Dи - диаметр выходного зрачка
излучающего канала; Dп - диаметр
входного зрачка приемного канала; В - расстояние между осями излучающего и
приемного каналов (база); R0 -
дальняя граница ближней (теневой) зоны, где начинается совмещение полей зрения
излучающего и приемного каналов; R1 -
ближняя граница дальней зоны, в которой имеет место полное перекрытие полей
зрения излучающего и приемного каналов; j - угол поля зрения приемного канала; y - угловая расходимость выходного
пучка излучающего канала
Особенности работы дальномера в ближней зоне
Требования к минимальной измеряемой дальности и точности измерений
противоречивы. Первое из указанных требований заставляет уменьшать теневую зону
дальномера, а второе - снижать уровень перегрузок приемного тракта отраженными
сигналами, что предъявляет противоположные требования к аппаратной функции.
Дополнительным фактором, отрицательно влияющим на точность в ближней
зоне, является различная модовая структура лазерного излучения в ближней и
дальней зонах. Эти различия усугубляются влиянием частичного перекрытия полей
излучающего и приемного каналов в ближней зоне. В результате этого в ближней
зоне аппаратной функцией выделяются одни моды и подавляются другие. Разница во
временном положении компонент излучения, соответствующих этим модам может
достигать 0,1-1 нс, что соответствует ошибке измерения дальности 0,01 - 0,2 м.
Таким образом для уменьшения минимальной измеряемой дальности < 2 м
необходимо принять меры по сокращению теневой зоны аппаратной функции и
устранению влияния модовой структуры излучения лазера.
Глава 3. Предложения по оптимальному построению импульсного высотомера на
полупроводниковом лазере
Методы повышения энергии зондирующего сигнала
В настоящее время наметилось несколько направлений повышения энергии
зондирующего излучения дальномеров за счет применения корректора расходимости
излучения выполненного с использованием цилиндрической линзы и путем
объединения пучков излучения нескольких лазеров с помощью специальных
оптических сумматоров. Благодаря этому и при одновременном использовании высокочувствительных
приемников, эффективных методов накопления, средств селекции помех и алгоритмов
временной привязки сигналов удалось повысить дальность действия дальномеров до
2-3, а в отдельных случаях и до 10 км.
.1 Корректор
расходимости излучения с использованием цилиндрической линзы
В исследуемом образце высотомера ДЛ-5 применен лазерный диод SPLPL90-3 размер тела свечения которого
составляет 200х10мкм. В размер 10мкм укладывается три излучающих перехода.
Характеристики дальнего поля применяемого лазерного диода приведены на
рисунке 3.1.


А Б
Рисунок 3.1. Расходимость излучения импульсного диода SPL PL90-3
На подстилающую поверхность передается только часть мощности лазерного
диода, лежащая внутри конуса с углом при вершине Θ равном: [12]
Θ = 2arctg(D/2Fоб)
Где: D=18мм - Световой диаметр объектива.
Fоб
=65мм - Фокусное расстояние объектива.
Для нашего случая Θ ≈ 160
Из рисунка 3.1А видно, что в плоскости параллельной p-n переходу забирается практически вся энергия, а в
перпендикулярной (рис. 3.1Б) примерно по уровню 0.8. Измеренное относительное
значение энергии в этом угле составляет примерно 30% от полной энергии
излучения. В тоже время размер тела свечения в перпендикулярной плоскости к p-n переходу составляет h┴=10мкм и геометрическая расходимость излучения
дальномера в этой плоскости равна:
γ = h┴/Fоб =
0.15х10-3рад
Размер же тела свечения в параллельной плоскости составляет h=200мкм и соответственно расходимость
излучения в этой плоскости равна:
γ =h///Fоб =
3х10-3рад
Отсюда видно, что увеличение мощности излучения можно получить за счет
увеличения расходимости излучения в плоскости перпендикулярной плоскости р-н
перехода.
Схема коррекции излучения цилиндрической линзой поясняется рисунком 3.2.

Рисунок 3.2 Коррекция излучения импульсного диода цилиндрической
микролинзой: n0 = 1 - показатель преломления
воздуха; n > 1 - показатель преломления
материала линзы; r - радиус
кривизны микролинзы; Δ - расстояние от тела свечения до центра кривизны
Параметр Δ определен конструкцией лазерного диода и равен
расстоянию от тела свечения до выходного торца корпуса диода.
Среднестатистическое значение этого параметра для лазера SPL PL90-3 составляет 0.285мм в пределах партии 50шт.
Н - приведенный размер тела свечения в плоскости перпендикулярной p-n
переходу;
h -
размер тела свечения;
В плоскости перпендикулярной р-n переходу изображение смещается на
величину L, а в параллельной на величину L1. В результате такой установки для
выходного объектива источник света становится астигматическим.
Величина S = L1+L - астигматизм источника света.
Θ┴ - угол, в котором забирается
световая энергия в плоскости перпендикулярной p-n переходу.
Для заданных значений:
Δ=0.285мм
Θ= 2b=160
Цилиндрическая линза имеет следующие параметры:
n=1.62,
r=0.5 (радиус линзы)
Расчет дал следующие значения:
S = L1+L=0.62мм. Астигматизм источника света.
Расходимость в перпендикулярной плоскости p-n перехода определяется
выражением 2γ┴ ≈ H/Fоб + S*D/(Fоб)2
Для полученного значения астигматизма источника света расходимость в
перпендикулярной плоскости p-n перехода составит Θ┴ =410.
Коррекция излучения цилиндрической микролинзой позволяет забирать в
плоскости перпендикулярной плоскости p-n перехода энергию примерно по уровню
0.2 против уровня 0.8 без коррекции.
3.2
Оптический сумматор на двулучепреломляющих элементах
Пучки излучения двух полупроводниковых лазеров поляризованы и совмещены с
помощью оптического сумматора, оптический сумматор выполнен в виде
двулучепреломляющей плоскопараллельной пластины, лазерные излучатели
расположены со стороны одной из ее граней так, чтобы их оптические оси были
параллельны, а плоскости поляризации лазерного излучения взаимно
перпендикулярны. Толщина h
двулучепреломляющей пластины определяется по формуле:
h = a/tgb, (3.2)
- расстояние между оптическими осями лазерных излучателей;
b - угол преломления необыкновенного луча.
Лазерные диоды могут быть выполнены в единой кристаллической структуре
или микросборке. В этом случае по технологическим соображениям излучающие
площадки целесообразно располагать параллельно. Для обеспечения взаимной
перпендикулярности направления поляризации излучаемых пучков перед одной из них
необходимо ввести полуволновую пластинку, поворачивающую угол поляризации на
90о.
Тесное взаимное расположение лазерных излучателей позволяет конструктивно
построить передающее устройство практически без увеличения габаритов, что
существенно для портативных приборов. Вместе с тем, благодаря использованию
двух лазерных излучателей вдвое возрастает энергия зондирующего излучения,
обеспечивая существенное повышение дальности
На рисунках 3.3 и 3.4 показаны варианты взаимного расположения лазерных
излучателей и оптических элементов передающего устройства.
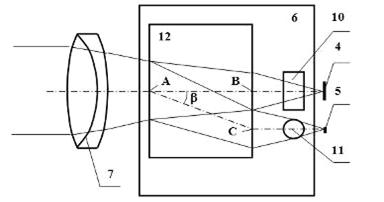
Рисунок 3.3 Вариант перпендикулярного положения излучателей
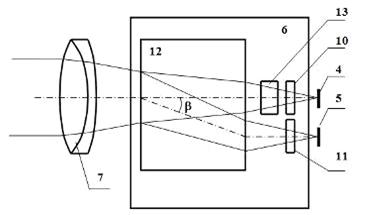
Рисунок 3.4 Вариант параллельного размещения излучателей
Перед излучателями установлены цилиндрические линзы 10 и 11, направляющие
пучки лазерного излучения на двулучепреломляющую плоскопараллельную пластину
12, после которой лазерное излучение поступает на объектив 7 передающего
устройства 1. Для совмещения пучков лазерного излучения толщина AB = h
двулучепреломляющей плоскопараллельной пластины 12 должна обеспечивать
схождение оптических осей лазерных излучателей в точке А выходной грани
пластины 12. Для этого должно соблюдаться условие 3.2.
В другом варианте построения передающего устройства (рис. 3.4) излучающие
площадки расположены параллельно. Перед лазерным излучателем 4 установлена
полуволновая пластина 13. Данное решение требует высокой стабильности
характеристик пластины 13 в диапазоне температур и спектрального разброса
излучения лазерного диода.
Наиболее эффективными методами повышения энергии зондирующего импульса
дальномера являются объединение пучков излучения нескольких лазеров с помощью
оптических сумматоров и установка цилиндрической линзы в передающем канале
дальномера.
Глава 4. Экспериментальное проверка технических предложений по
модернизации высотомера ДЛ-5
.1 Результаты
экспериментальной проверки
.1.1
Результаты измерения энергии передающего канала
В основе проведенных экспериментов находится оптическая схема лазерного
высотомера ДЛ-5 приведенная на рисунке 1.1.
В фотоприемнике используется фотодиод S6045-01 фирмы «HAMAMATSU» с размером светочувствительной площадки 200мкм.
Вариант оптической схемы высотомера ДЛ-5 с корректирующей цилиндрической
микролинзой показан на рисунке 4.1.

Рисунок 4.1 Принципиальная оптическая схема дальномера-высотомера ДЛ-5 с
коррекцией излучения цилиндрической микролинзой: 1 - Лазерный диод SPL PL90-3 фирмы «OSRAM»,
2 - Объектив, , 3 - Цилиндрическая микролинза
Для подтверждения результатов расчета были проведены экспериментальные
работы подтверждающие эффективность коррекции излучения цилиндрической линзой.
Измерения, проведенные в схеме передающего канала, показали рост энергии
в 1,8 .. 2 раза за счет установки цилиндрической линзы.
Среднестатистическое значение составило 1,8 раза по результатам 25
измерений. Измерение относительного значения уровня энергии в угле 3х10-3 Рад
относительно полной энергии на выходе из объектива проводилось по следующей
методике на оптической скамье ОСК-2 с объективом 1600 мм.
Краткое описание методики измерений:
собирается оптический блок дальномера с цилиндрической линзой;
лазерный диод устанавливают в фокальную плоскость объектива;
устанавливают оптический блок напротив объектива скамьи и
подается питание на плату питания излучателя;
в фокальную плоскость объектива скамьи устанавливалась диафрагма
с размером, соответствующим расходимости 3х10-3 Рад, а за ней
светоизмерительная головка подключенная к дисплею NOVA II фирмы «OFIR»
(далее по тексту прибор «OFIR»);
убирают диафрагму и записывают новое показание прибора «OFIR», а затем вычисляют относительное
значение мощности.
Среднее значение относительного уровня энергии составило η=0.83 для пяти образцов лазерных
диодов с наклеенными линзами.
Далее, эксперимент проводился с целью контроля формы светового пятна
излучения на светочувствительной площадке фотоприемника.
.1.2.Результат
визуализации формы световых пятен
Таким образом, применение цилиндрической микролинзы позволило увеличить
коэффициент использования энергии для данной партии лазерных диодов примерно в
1,8 раза, что позволяет увеличить дальность действия лазерного высотомера в 1,3
раза.
4.1.3
Результаты использования оптической схемы с двулучепреломляющим кристаллом
С целью снижения времени измерений и увеличения дальности действия
высотомера ДЛ-5 была проверена схема сложения мощности от двух излучателей с
помощью двулучепреломляющего кристалла. Вариант данной схемы представлен на
рисунке 4.2.

Рисунок 4.2 Принципиальная оптическая схема дальномера-высотомера ДЛ-5 с
коррекцией излучения цилиндрической микролинзой и сложением излучения от двух
лазерных диодов с помощью двулучепреломляющего кристалла с использованием
исландского шпата: 1 - Два лазерных диода 905DISJ08Y
фирмы «LASER COMPONETS», 2 - Объектив, 3 - Цилиндрическая
микролинза, 4 - Призма из исландского шпата
Исландский шпат представляет собой разновидность углекислого кальция
(СаСО3) кристаллизующуюся в виде кристаллов гексагональной системы. Он обладает
выраженным двойным лучепреломлением.
Лучи внутри кристалла расщепляется на два луча. Первый луч называется
обыкновенным о, а второй необыкновенным е (рис. 4.3).
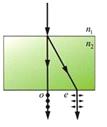
Рисунок 4.3 Обыкновенный и необыкновенный лучи
Пластинка вырезалась из исландского шпата согласно рисунку 4.4.
Рисунок
4.4 Пластинка из исландского шпата
Под
величиной сноса подразумевается расстояние между осями световых пучков на
выходе из кристалла (см. рис. 4.4).
Для
суммирования мощности двух излучателей толщина пластинки
определяется
расстоянием между центрами тел свечения лазерных диодов.
В
данной схеме вместо лазерного диода SPL PL90-3
фирмы «OSRAM» используется два лазерных диода 905DISJ08Y
фирмы «LASER COMPONETS». Данный лазерный диод
является полным аналогом SPL PL90-3, но имеет вариант
исполнения на керамической подложке.
.1.4.
Результаты макетирования передающего канала
Для проверки возможности реализации данного варианта схемы был создан
макет передающего канала. В данном макете использовался объектив и специально
разработанный источник импульсного лазерного излучения с двумя лазерными
диодами 905DISJ08Y.
Общий вид источника импульсного лазерного излучения с двумя лазерными
диодами 905DISJ08Y представлен на рисунке 4.5. Расстояние между телами свечения
двух лазерных диодов равно 1.7 мм и определяется конструктивными ограничениями.
Рисунок 4.5 Плата источника импульсного лазерного излучения с двумя
лазерными диодами
Для данного расстояния была изготовлена призма длиной 17.4 мм.
Каждый лазерный диод подвергался доработке. На него наклеивалась
цилиндрическая микролинза из отрезка оптического волокна диаметром 200 мкм.
При сборке проводились измерения всех важных световых параметров, с точки
зрения применения в оптической схеме дальномера.
. Результаты вклейки микролинзы:
до установки цилиндрических линз мощность излучения каждого лазера
составила по 70 Вт;
после установки линз по 60,2 Вт;
измерения проводились при длительности импульса 100 нс и частоте 8,3 кГц.
. Расходимость излучения после установки микролинзы:
первый лазерный диод а //=110 а┴=130;
второй лазерный диод а//= 100 а┴=120;
суммарный от двух диодов а//=160 а┴=140
. Суммарная мощность излучения на выходе полевого шпата составила
110,4 Вт.
Измерения проводились при длительности импульса 100 нс и частоте 8,3 кГц.
Далее был собран макет передающего канала согласно оптической схемы и
проведены работы по измерению параметров излучения на выходе из объектива
макета:
визуализация формы световых пятен;
измерение энергетики на выходе из объектива макета;
Это объясняется тем, что длина оптического пути для обыкновенного и
необыкновенного лучей в призме различается.
.1.5
Результаты измерения мощности на выходе оптического блока
Измерения проводились при длительности импульса 100 нс и частоте 8,3 кГц
по прибору «OFIR» в фокусе коллиматора 1600 мм.
Амплитудная мощность на выходе макета лазерного высотомера ДЛ-5М
составила 108 Вт. Увеличение мощности излучения по отношению к лазерному
высотомеру ДЛ-5 составило 3,6 раза. Дальность действия высотомера ДЛ-5 при
такой мощности увеличилась в 1,9 раза и составила 1900 м.
В таблице 4.1 приведены технические характеристики лазерного высотомера
ДЛ-5М, полученные по результатам расчетов, исследований и экспериментальных
данных.
Таблица 4.1
Технические характеристики лазерного высотомера ДЛ-5М
|
ДЛ-5М
|
ДЛ-5
|
|
Длина волны излучения
|
905 нм
|
|
Ширина диаграммы
направленности передающего канала
|
не более 0,003х0,001 рад
|
|
Диапазоны измеряемой
дальности при МДВ не менее 5 км
|
0.5-200 м 200-1900 м
|
2-200 м 200-1000 м
|
|
Среднеквадратическое
отклонение значений измеряемой дальности: диапазон 1 диапазон 2
|
не более 0,1 м не более
0,5 м
|
не более 0,5 м не более 2
м
|
|
Измерение скорости снижения
при посадке летательного аппарата
|
2 м/c
|
-
|
|
Среднеквадратическое
отклонение значений скорости при посадке летательного аппарата
|
0,2 м/c
|
-
|
|
Частота выдачи информации о
дальности: диапазон 1 диапазон 2
|
не менее 50 Гц не менее 10
Гц
|
не менее 50 Гц не менее 10
Гц
|
|
Интерфейс связи
|
RS-232
|
|
Габаритные размеры
|
159x140x80 мм
|
88x87x40 мм
|
|
Масса
|
не более 1,4 кг
|
не более 0,2 кг
|
.2
Конструкторско-технологическая часть
.2.1 Описание
конструкции лазерного высотомера ДЛ-5
При создании высотомера ДЛ-5 уделялось особое внимание достижению малых
весов и габаритов при сохранении заданных технических характеристик. На рисунке
4.6 приведен габаритный чертеж высотомера.
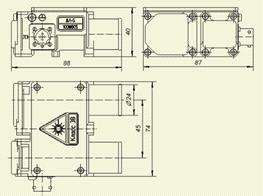
Рисунок 4.6 Габаритный чертеж высотомера ДЛ-5
На рисунке 4.7 представлена структурная схема приемопередатчика.
Рисунок 4.7 Структурная схема приемопередатчика изделия ДЛ-5
В состав высотомера входит оптико-механический блок. Оптико- механический
блок состоит из двух функциональных каналов:
канала излучателя;
канала фотоприемника.
Каналы имеют встроенную светозащиту с помощью двух конусов.
Оптико-механический блок состоит из несущего корпуса, двух объективов
диаметром 20мм, каналов излучателя и фотоприемника, защитной крышки.
Объектив излучающего канала представляет собой склейку диаметром 20 мм и
световым 18 мм. Полупроводниковый лазер SPL-PL90-3
фирмы «OSRAM», расположен в фокальной плоскости
объектива.
Объектив канала фотоприемника формирует отраженный от подстилающей
поверхности световой поток полупроводникового лазера, в световое пятно,
согласованное с размерами светочувствительной площадки лавинного фотодиода S6045-01, фирмы «Hamamatsu».
Светочувствительная площадка фотоприемника размером 200 мкм закрыта
интерференционным светофильтром, предназначенным для уменьшения фоновых шумов.
Полоса пропускания светофильтра по уровню 0,5 составляет 60 нм, и выбирается на
основании температурного дрейфа и технологического разброса лазерных диодов.
В состав лазерного высотомера кроме оптико-механического блока входят
фотоприемник, источник импульсного лазерного излучения, плата управления и
обработки информации. Габаритный чертеж фотоприемника представлен на рисунке
4.8.
Рисунок 4.8 Габаритный чертеж фотоприемника
Интерференционный светофильтр устанавливается на экране над фотодиодом
после проведения юстировочных операций в составе оптико-механического блока.
Габаритный чертеж источника импульсного излучения показан на рисунке 4.9.

Рисунок 4.9 Габаритный чертеж источника импульсного излучения
Излучение полупроводникового лазера ориентируется в двух плоскостях и
визуально контролируется при помощи прибора ночного виденья. Габаритный чертеж
блока управления и обработки информации представлен на рисунке 4.10.

Рисунок 4.10 Габаритный
чертеж источника импульсного излучения
4.2.2
Технологические особенности построения лазерного высотомера ДЛ-5
Все электронные блоки выполнены с использованием поверхностного монтажа.
Платы двухсторонние, ширина проводников и расстояние между проводниками
составляет 0,25 мм.
Используемые в ДЛ-5 материалы не являются остродефицитными, хорошо
обрабатываются на стандартном оборудовании и не требуют специальных
технологических процессов, что позволяет организовать серийное производство на
предприятии, имеющем обычное современное технологическое оснащение
производства.
Изготовление корпуса осуществляется на станке с ЧПУ. Материал корпуса -
Д16Т.
Большинство механических деталей изготавливается методом токарной и
фрезерной обработки.
Печатные платы электронных блоков разрабатываются в системе PCAD-2001 для 3 класса точности в
соответствии с требованиями ГОСТ 23751 и изготавливаются методом металлизации
сквозных отверстий. Для монтажа применяется припой Прв КР2 ПОС61 ГОСТ 21931 с
последующим покрытием мест пайки лаком УР-231.
В оптико-механическом блоке применены объективы изготовленные из
материалов К8 и ТФ1 с просветляющими многослойными покрытиями на длину волны
905 нм и потерями не более 0,5%.
Защитный кожух изделия покрывается эмалью ЭП-525.
Герметизация осуществляется с применением термостойкого силиконового
герметика черного цвета.
Изделие проходит осушку сухим азотом через специальный вентиль.
Надписи и знаки на корпус наносятся лазерной гравировкой с последующей
затиркой гравировки эмалью ПФ-115, белая.
Таким образом увеличение мощности можно получить за счет увеличения
расходимости излучения в плоскости, перпендикулярной плоскости p-n перехода лазерного диода SPL PL90-3. Это достигается установкой цилиндрической микролинзы на
корпус ЛД. В результате в схеме передающего канала рост энергии увеличивается в
1,8 раза, что позволило увеличить дальность действия лазерного высотомера в 1,3
раза, т.е. до 1300 м. С целью снижения числа зондирований и увеличения
дальности действия ДЛ-5, была опробована опытная схема с коррекцией излучения
цилиндрической микролинзой и сложением излучения от двух ЛД с помощью
двулучепреломляющего кристалла из исландского шпата. В результате амплитудная
мощность на выходе передающего канала составила 108 Вт. Увеличение мощности
излучения по отношению к лазерному высотомеру ДЛ-5 составило 3,6 раза.
Дальность действия высотомера ДЛ-5 при такой мощности увеличилась в 1,9 раза и
составила 1900 м.
Глава 5.
Безопасность жизнедеятельности [18]
.1 Опасные и
вредные факторы при работе лазерных установок
При работе с лазерными установками человек может подвергаться воздействию
прямого (коллимированного), рассеянного и отраженного излучения. Энергия
лазерного излучения, поглощенная тканями, преобразуется в другие виды энергии:
тепловую, механическую, энергию фотохимических процессов, что может вызывать
ряд эффектов: тепловой, механический, биологический и др., способных оказывать
негативное действие на организм человека или отдельные его органы и в первую
очередь на глаза и кожу.
.2 Классы
опасности лазеров
К лазерам I класса относят
полностью безопасные лазеры, т. е. такие лазеры, излучение которых не
представляет опасности при воздействии ни на глаза, ни на кожу.
Лазеры II класса - это лазеры, выходное
излучение которых представляет опасность при облучении глаз и (или) кожи прямым
или зеркально отраженным излучением (диффузно отраженное излучение безопасно
как для глаз, так и для кожи).
К лазерам III класса относят
такие лазеры, выходное излучение которых представляет опасность при облучении
глаз прямым, зеркально отраженным, а также диффузно отраженным излучением. Этот
класс распространяется только на лазеры, генерирующие излучение в видимом и
ближнем ИК-диапазонах спектра.
Лазерные изделия должны маркироваться. Знаки должны быть четкими, хорошо
видимыми и надежно укреплены на изделии. Рамки текста и обозначения должны быть
черными на желтом фоне.
5.3 Методы и
средства защиты от лазерного излучения
Способы защиты подразделяются на коллективные и индивидуальные (ГОСТ
12.4.011 - 89), их маркировка по ГОСТ 12.4.115 - 82.
Коллективные средства защиты включают:
защитные экраны, кожухи; систему блокировок и сигнализации, перегородки
из непроницаемого для лазерного излучения материала, экранирование света
импульсных ламп накачки и ультрафиолетового излучения газового разряда, окраску
внутренних поверхностей помещений, а также находящихся в них предметов в с
минимальным коэффициентом отражения.
Индивидуальные средства защиты от лазерного излучения
Средства индивидуальной защиты от лазерного излучения включают в себя средства
защиты глаз и лица: защитные очки, щитки, насадки, средства защиты рук,
специальную одежду.
.4 Расчет
лазерной безопасности лазерного высотомера ДЛ-5
Классификация проводится по ГОСТ Р 50723-94 c учетом СНиП 5804-91:
В высотомере применен излучатель со следующими рабочими характеристиками:
длина волны лазерного излучения (l), нм 905;
максимальная импульсная мощность (Р), Вт, не более 60;
длительность импульса (t) по
уровню 0,5 100*10-9;
частота повторения импульсов (F), с-1 6400
Оценка безопасности в режиме накопления по классу 1 ГОСТ Р 50723:
Pср = W1×F = 10,9×10-7 ×6400 = 7×10-3 Вт,
ДПИ для лазерных изделий класса 1 по таблице А.1 ГОСТ Р 50723 равен:
ДПИ = 1,2×10-4×С4×С6 = 1,2×10-4×2,57×1 = 3,1×10-4 Вт.
Где С4 = 100,002(l-700)
= 100,002(905-700) = 2,57,
С6 =1.
Средняя мощность последовательности импульсов излучения превышает ДПИ,
следовательно, изделие не удовлетворяет по данному критерию требованиям класса
1.
Оценка соответствия классу 3А ГОСТ Р 50723 в режиме накопления:
Средняя мощность последовательности импульсов равна:
Pср = W1×F = 10,9×10-7 ×6400 = 7×10-3 Вт,
ДПИ для лазерных изделий класса 3А по таблице А.3 ГОСТ Р 50723:
ДПИ = 6×10-4×С4×С6 = 6×10-4×2,57×1 = 1,54×10-3 Вт.
Где С4 = 100,002(l-700)
= 100,002(905-700) = 2,57,
С6 =1.
Средняя мощность последовательности импульсов излучения превышает ДПИ,
следовательно, изделие не удовлетворяет по данному критерию требованиям класса
3А.
Оценка соответствия классу 3В ГОСТ Р 50723 в режиме накопления:
Средняя мощность последовательности импульсов равна:
Pср = W1×F = 10,9×10-7 ×6400 = 7×10-3 Вт,
ДПИ для лазерных изделий класса 3В по таблице А.4 ГОСТ Р 50723:
ДПИ = 0,5 Вт.
Средняя мощность последовательности импульсов излучения не превышает ДПИ,
следовательно, изделие удовлетворяет по данному критерию требованиям класса 3В.
Таким образом, изделие может быть отнесено к классу 3В ГОСТ Р 50723-94.
Глава 6.
Экологическая часть [18]
.1
Электромагнитное загрязнение окружающей среды
Интенсивное использование электромагнитной и электрической энергии в
современном информационном обществе привело к тому, что в последней трети XX
века возник и сформировался новый значимый фактор загрязнения окружающей среды
- электромагнитный.
Термин "глобальное электромагнитное загрязнение окружающей
среды" официально введен в 1995 году Всемирной Организацией
Здравоохранения (ВОЗ), включившей эту проблему в перечень приоритетных для
человечества. Живые организмы в процессе эволюции приспособились к
определенному уровню ЭМП, однако, резкое значительное повышение уровня ЭМП
вызывает напряжение адаптационно-компенсаторных возможностей организма.
.2
Воздействие ЭМП малой мощности на биологические объекты
Исследования, проведенные отечественными и зарубежными учеными, привели к
открытию эффекта сверхмалых доз. Так, на кривой зависимости величины
физиологического эффекта от плотности мощности облучения, наблюдаются два
максимума (рис. 6.1). Эти максимумы также разделены "мертвой зоной",
наличие которой объясняется как результат включения в работу активных барьерных
механизмов и компенсирующих систем организма. Когда эти силы перестают
справляться, наблюдается тотальное возбуждение, завершающееся срывом и гибелью
организма.
Рисунок 6.1 Зависимость эффекта (реакции объекта) от плотности мощности
СВЧ-излучения
Экспериментально определены приблизительные резонансные частоты в Гц
некоторых структур живой клетки: соматическая клетка - 2,39× 1012; геном клетки человека - 2,5× 1013; хромосома метафазная - 1,5× 1013; ДНК - (2...9) × 109; клеточные мембраны - 5× 1010; эритроциты - (3,5...4,0) × 1010. При длительном воздействии
низкоэнергетических электромагнитных излучений на резонансной частоте,
появляется вероятность изменения (в том числе и негативного) генетического
аппарата живых клеток.
.3 Зарубежный
и российский опыт нормирования электромагнитных полей
На международном уровне основным органом комплексной координации проблемы
обеспечения безопасности биосистем в условиях воздействия ЭМП является
Всемирная организация здравоохранения. С 1995 года в ВОЗ действует долгосрочная
программа WHO EMF Project. Начиная с 1998 года программа ВОЗ включает в сферу
своих интересов проблему воздействия ЭМП на окружающую среду и элементы
экосистем (ICNIRP, 2000).
В РФ национальным научно-координационным органом в области
электромагнитной безопасности является Российский национальный комитет по
защите от неионизирующих излучений, который проводит оценку состояния знаний о
влиянии неионизирующего излучения на здоровье и благополучие человека, составляет
научно-обоснованные рекомендации по снижению облучения ЭМП.
Критерии экологического нормирования.
В соответствии со статьей 25 Федерального закона "Об охране
окружающей природной среды" от 2 июня 1993 года № 5076-1, нормирование
качества окружающей среды проводится с целью установления предельно допустимых
значений факторов воздействия на окружающую среду, гарантирующих экологическую
безопасность населения.
Основным критерием экологического нормирования ЭМП может служить
положение, в соответствие с которым безопасным для экосистемы считается ЭМП
такой интенсивности, при которой возможна потеря отдельной особи при
обязательном условии сохранения стабильности экосистемы. При экологическом
нормировании ПДУ ЭМП имеет смысл определение верхнего предела устойчивости
организма, при превышении которого ЭМП становится лимитирующим фактором
окружающей среды (рис. 6.2).

Рисунок 6.2 Условная кривая изменений показателей жизнедеятельности
организма от интенсивности воздействующего ЭМП
За ПДУ принимаются биологически обоснованные уровни, установленные в
результате физических, физиологических, клинических, биохимических и других
исследований на биологических объектах.
Таким образом проведенный анализ экспериментальных работ показывает, что
ЭМП является весьма чувствительным фактором для всех элементов биоэкосистем от
человека до простейших. А решение проблемы электромагнитного загрязнения
окружающей среды является комплексной задачей, затрагивающей социальные и
экономические интересы различных отраслей и ведомств, требующей
междисциплинарных подходов и привлечения специалистов разного профиля.
Глава 7. Экономическая часть
.1 Расчет стоимости опытного образца высотомера ДЛ-5М [19]
При экономических расчетах были приняты нормативы действующие в ОАО «НИИ
«Полюс» им. М.Ф. Стельмаха» на 2013г.:
Средняя месячная зарплата 37 750,00 руб.
Накладные расходы 191% от фонда оплаты труда (ФОТ)
Отчисления на социальные
нужды от ФОТ 30,2 %
Стоимость опытного образца лазерного высотомера ДЛ-5 (Соп(ДЛ-5)) без
платы источника импульсного лазерного излучения составила 1 200 000,00 руб.
В таблице 7.1 приведен перечень работ и трудоемкость по доработке изделия
ДЛ-5 с целью улучшения эксплуатационных характеристик.
Таблица 7.1. Трудоемкость работ по доработке высотомера ДЛ-5
|
1
|
2
|
3
|
4
|
|
№
|
Наименование работы
|
Квалификация специалиста
|
Количество чел. * мес.
|
|
1
|
Сборка, монтаж электронных
блоков, юстировка и регулировка образца высотомера.
|
Ведущий инженер-конструктор
Ведущий инженер Техник
|
1х0,25 1х0,25 1х0,25
|
|
2
|
Изготовление оснастки для
сборки излучателя с микроцилиндрической линзой.
|
Техник
|
1х0,25
|
|
3
|
Корректировка программного
обеспечения блока управления высотомера.
|
Инженер-программист
|
1х0,4
|
|
4
|
Разработка и отладка ПО
привязки центра тяжести накопленного массива.
|
Инженер-программист
|
1х0,25
|
|
5
|
Изготовление и настройка
платы источника импульсного лазерного излучения с доработанным лазером.
|
Ведущий инженер
|
1х0,25
|
|
6
|
Разработка ПО для измерения
скорости при посадке БПЛА.
|
Инженер-программист
|
1х1
|
|
7
|
Испытания модернизированного
образца высотомера.
|
Главный конструктор Ведущий
инженер
|
1х0,25 1х0,25
|
Итого: 3,4 чел.*мес.
Трудоемкость (Т) по созданию модернизированного высотомера ДЛ-5М
составляет 3,4 чел.*мес. При средней зарплате (S), установленной в «НИИ «Полюс»
на 2013г. в размере 37 750,00 руб. фонд оплаты труда (Ф) для ДЛ-5М составляет:
Ф = Т * S = 3,4 * 37 750,00 = 128350,00 (руб.)
Доработка высотомера ДЛ-5 по выработанным предложениям осуществляется в
части:
1) Изготовления блока источника импульсного лазерного излучения.
2) Изготовления оснастки и приспособлений для сборки лазеров с
микроцилиндрическими линзами и исландским шпатом.
Для доработки образца потребовались материалы и комплектующие, перечень
которых приведен в таблице 7.2 и таблице 7.3:
Лист Д16Т - 332 руб/кг;
пруток Д16Т - 167 руб/кг;
пруток 12Х18H9Т - 250 руб/кг;
оптический клей ОКТ-1Ф - 100 руб;
герметик ВГО-1 - 250 руб/кг;
герметик «Виксинт У-1-18» - 220 руб/кг;
эластосил 137-180 - 90 руб. за 0.08 кг;
полиамид ПА-6 - 70 руб/кг;
исландский шпат - 700 руб/см^3;
заготовка материала К108 Ø 1 мм х 0,02 м - 400,00 руб;
фольгированный стеклотекстолит - 6500,00 руб/кг;
Таблица 7.2. Перечень радиоэлектронных компонентов для доработки
высотомера ДЛ-5
|
Наименование
|
Кол-во, шт.
|
Стоимость, руб.
|
Стоимость итого с НДС, руб.
|
|
Лазерный диод OSRAM
SPL PL90-3
|
2
|
1000,00
|
2000,00
|
|
Чип конденсатор GRM21BR71A106KE51L
|
1
|
24,00
|
24,00
|
|
Чип конденсатор GRM21BR71H823KA01L
|
1
|
6,50
|
6,50
|
|
Чип конденсатор
GRM216R71H103KA01L
|
1
|
10,60
|
10,60
|
|
Чип конденсатор
GRM216R71H153KA01D
|
1
|
10,60
|
10,60
|
|
Чип конденсатор GRM216R71H223KA01J
|
1
|
10,60
|
10,60
|
|
Микросхема LM5111-2MY/NOPB «National Semiconductor»
|
1
|
54,80
|
54,80
|
|
Резисторы CR
«Bourns»
|
1
|
12,00
|
12,00
|
|
Резисторы LTR10 «ROHM Semiconductor»
|
1
|
10,70
|
10,70
|
|
Резисторы CR0603-JW-104ELF
|
2
|
2,20
|
4,40
|
|
Резистор CR0603-J/-000E
|
1
|
2,20
|
2,20
|
|
Резистор LTR10EVHFLR100
|
1
|
2,20
|
2,20
|
|
Резистор CR0603-J/-000E
|
2
|
2,20
|
4,40
|
|
Резистор CR0603-FX-51R0ELF
|
1
|
2,20
|
2,20
|
|
Резистор CR0603-J/-1R0ELF
|
1
|
2,20
|
2,20
|
|
Резистор CR0603-FX-49R9ELF
|
1
|
2,20
|
2,20
|
Итого: 2159,60 руб.
Стоимость радиоэлектронных компонентов необходимых на доработку
высотомера ДЛ-5, составляет 2159,60 руб.
В таблице 7.3 приведен перечень материалов для изготовления оснастки и
сборки лазерного высотомера ДЛ-5.
Таблица 7.3. Материалы для доработки изделия ДЛ-5
|
Наименование
|
Масса заготовки, кг.
|
Кол-во, шт.
|
Стоимость, руб.
|
Стоимость итого с НДС, руб.
|
|
Клей ОКТ-1Ф
|
0,005
|
1
|
20,00
|
20,00
|
|
Герметик ВГО-1
|
0,003
|
1
|
0,75
|
0,75
|
|
Герметик «Виксинт У-1-18»
|
0,003
|
1
|
1,00
|
1,00
|
|
Эластосил 137-180
|
0,080
|
1
|
90,00
|
90,00
|
|
К108 0,005 м Ø 1 мм
|
0,004
|
2
|
200,00
|
200,00
|
|
Исландский шпат
|
0,010
|
1
|
700,00
|
700,00
|
|
Д16Т - лист
|
0,140
|
1
|
47,00
|
47,00
|
|
Д16Т - пруток
|
0,200
|
1
|
34,00
|
34,00
|
|
12Х18H9Т - пруток
|
0,100
|
1
|
25,00
|
25,00
|
|
Фольгированный
стеклотекстолит
|
0,030
|
1
|
200,00
|
200,00
|
Итого: 1317,75 руб.
Стоимость материалов необходимых для доработки высотомера ДЛ-5,
составляет 1317,75 руб.
Доработка лазерного высотомера ДЛ-5 осуществляется следующими
специалистами:
|
№ п.п.
|
Наименование должности
|
Количество чел.*мес.
|
Месячная Зар.плата (руб.)
|
Сумма зар.платы (руб.)
|
|
1. 2. 3. 4. 5.
|
Главный конструктор Ведущий
инженер-конструктор Ведущий инженер Техник Инженер-программист
|
1*0,25 1*0,25 1*0,75 1*0,50
1*1,65
|
60000,00 48200,00 42800,00
28150,00 33409,09
|
15000,00 12050,00 32100,00
14075,00 55125,00
|
Итого 3,4 чел.*мес. 128 350,00 руб.
Себестоимость изделия складывается из затрат на материалы и
комплектующие, фонда оплаты труда основного производственного персонала,
отчислений на социальные нужды, накладных расходов.
В таблице 7.4. приведена структура цены на доработку высотомера ДЛ-5.
Таблица 7.4 Структура цены доработки высотомера ДЛ-5
|
№ п.п.
|
Наименование статьи
|
Сумма, руб.
|
|
1.
|
Затраты на материалы в т.ч.
|
3477,35
|
|
1.1.
|
сырье и основные материалы
|
1 202,00
|
|
1.2.
|
вспомогательные материалы
|
115,75
|
|
1.3.
|
покупные полуфабрикаты
|
-
|
|
1.4.
|
возвратные
отходы(вычитаются)
|
-
|
|
1.5.
|
комплектующие изделия
|
2159,60
|
|
1.6.
|
транспортно-заготовительные
расходы
|
-
|
|
1.7.
|
тара (невозвратная) и
упаковка
|
-
|
|
2.
|
Работы и услуги сторонних
организаций
|
-
|
|
3.
|
Спецоборудование
|
-
|
|
4.
|
Фонд оплаты труда (ФОТ)
|
128 350,00
|
|
5.
|
Отчисления на социальные
нужды 30,2% от ФОТ
|
38 761,70
|
|
6.
|
Накладные расходы 191% от
ФОТ
|
245 148,50
|
|
7.
|
Прочие
|
-
|
|
8.
|
Себестоимость
|
415 737,55
|
Итого: 415 737,55 руб.
Затраты на доработку высотомера ДЛ-5 с учетом накладных расходов (Здор),
принятых в ОАО «НИИ «Полюс» составляют 415 737,55 рублей.
Трудоемкость работ по доработке опытного образца и проведению испытаний
модернизированного высотомера ДЛ-5М, выполняемых собственными силами,
оценивается в 3,4 чел*мес., тогда стоимость собственных работ при средней
зарплате 37 750,00 руб. (норматив, принятый на 2013г.) составит 128 350,00
рублей (без учета прибыли и стоимости материалов).
Стоимость доработки опытного образца (с учетом прибыли) составит:
Сдор = Здор + Ф * 0,3214;
Сдор=415 737,55 + 128 350,00 * 0,3214 = 456989,24 (руб.)
Стоимость опытного образца высотомера ДЛ-5М составит:
Соп(ДЛ-5М) = Соп(ДЛ-5) + Сдор
Соп(ДЛ-5М) = 1 200 000,00 + 456 989,24 = 1 656 989,24 ( руб.)
.2 Расчет стоимости высотомера ДЛ-5М в серийном производстве
Стоимость изготовления серийного образца определяется из стоимости
опытного образца с учетом понижающих коэффициентов.
Стоимость опытного образца с учетом стоимости комплектующих, трудоемкости
изготовления, как самого образца, так и оснастки составляет Соп(ДЛ-5М)= 1 656
989,24 руб.
Предполагаемый выпуск высотомеров ДЛ-5М составит 500 шт. в год. Стоимость
изделия при серийном выпуске определяется в соответствии с выражением:
Ссер(ДЛ-5М)= Соп(ДЛ-5М) * Кудеш * Кζ * ξ
где : Ссер - стоимость серийного образца;
Соп - стоимость опытного образца;
Кудеш - коэффициент перехода от условий изготовления опытного образца к
условиям освоения серийного производства, учитывающего снижение стоимости
образцов при изменении условий производства, равный 0,71;
Кζ - коэффициент перехода от условий
освоения серийного производства к условиям серийного производства, учитывающего
снижение стоимости образца при освоении производства; в нашем случае 0,82;
ξ - удельный вес затрат на
изготовление опытного образца в полной стоимости разработки, в нашем случае
имеет значение 0,47.
Стоимость серийного образца высотомера ДЛ-5М в ценах 2013г. составит:
Ссер(ДЛ-5М) = 1 656 989,24 * 0,71 * 0,82 * 0,47 = 453408,59 (руб.)
С учетом НДС (18%) 535022,14 руб.
При серийном выпуске высотомера ДЛ-5 объемом 500 шт. в год его стоимость
составляет:
Ссер(ДЛ-5) = 355 724,20 руб.
С учетом НДС (18%) 419 754, 56 руб.
Значения вышеперечисленных коэффициентов взяты в соответствии с
«Методикой определения допустимой стоимости разработки и серийного
производства».


Расчеты
показывают, что предложенные в работе методы увеличения диапазона измеряемой
дальности с 1000 м до 1900 м, приводят к удорожанию высотомера ДЛ-5 на 27,46 %
при серийном производстве.
Заключение
Основные результаты и выводы
. Проведенные в дипломной работе теоретические и экспериментальные
исследования режимов работы серийно выпускаемого импульсного дальномера -
высотомера ДЛ-5 на основе полупроводникового лазера и предложенные новые методы
и способы увеличения диапазонов измерения дальности, повышения точности
измерений, а также измерения скорости и точности скорости при снижении и
посадке БПЛА позволяют за счет названных улучшенных характеристик повысить
качество определения характеристик объектов подстилающей поверхности.
Полученные научные и практические результаты позволяют говорить о
существовании теоретических и технологических основ для создания импульсного
лазерного дальномера-высотомера нового поколения типа ДЛ-5М.
Рассмотренные материалы свидетельствуют о значительных достижениях в
лазерной дальнометрии-высотометрии и широком диапазоне исследований разработок
в этой области.
Для эффективного применения импульсных дальномеров-высотомеро на основе
полупроводниковых лазеров ( в системах беспилотных летательных аппаратов
контроля объектов подстилающей поверхности) необходима их доработка, а именно:
повышение максимальной дальности измерения (> 1000 м) и точности (<
2 м);
снижение минимальной измеряемой дальности (< 2 м) при повышении
точности (< 0,5 м) для обеспечения посадки БПЛА по самолетному принципу;
-
возможность измерения скорости  при
точности ее измерения
при
точности ее измерения  .
.
2. Установлено, что применение некогерентного накопления отсчетов
сигнала существенно улучшает характеристики обнаружения сигнала и в несколько
раз увеличивает дальность действия лазерного локатора.
Энергетический потенциал дальномера в моноимпульсном режиме обеспечивает
измерение промежуточной высоты 200 м. При измерении максимальной дальности 1000
м дефицит энергии составляет 20 раз.
Работа дальномера в режиме накопления компенсирует дефицит энергии, что
позволяет измерять максимальную дальность до 1000 м.
Выполненный в работе расчет точности измерения дальности в режиме
накопления показал, что его энергетический потенциал обеспечивает
среднеквадратическую погрешность измерения ≈ 0,08 м, что существенно ниже
данных в технических условиях, согласованных с заказчиком ДЛ-5: 0,5 м для
измерения 2-200 м и 2 м для диапазона 200-1000 м.
Для увеличения измеряемой max
дальности > 1000 м, уменьшения min измеряемой дальности < 2 м и измерения вертикальной составляющей
скорости < 5 м/с разработаны новые методы увеличения энергетического
потенциала ДЛ-5.
. Экспериментально подтверждена техническая реализуемость
разработанных методов регистрации и обработки локационных сигналов.
1) метод временной привязки массива
данных путем определения положения его первого начального момента (центра
тяжести) поддерживает высокую точность временной привязки как в линейном
диапазоне входного сигнала, так и при значительных перегрузках;
2) среднеквадратическая ошибка по
результатам накопления в 10 каналах дальности 2-уровневого накопителя при
объеме накопления N=200 и отношении
сигнал/шум S на входе до 10 не превышает 0,1 м.
При этом систематическая ошибка измерения дальности при S < 10 не превышает 0, 2 м.
. Увеличение мощности излучения можно получить за счет увеличения
расходимости излучения в плоскости перпендикулярной плоскости p-n перехода. Это достигается установкой цилиндрической
микролинзы непосредственно на корпус лазерного диода SPL PL90-3.
Для подтверждения результатов расчета были проведены экспериментальные
работы подтверждающие эффективность коррекции излучения цилиндрической линзой.
Измерения, проведенные в схеме передающего канала, показали рост энергии
в 1,8 .. 2 раза за счет установки цилиндрической линзы. Среднестатистическое
значение составило 1,8 раза по результатам 25 измерений.
В результате коррекции размер светового пятна увеличился вдоль одной из
координат (в плоскости перпендикулярной плоскости p-n перехода). Таким
образом, применение цилиндрической микролинзы позволило увеличить коэффициент
использования энергии для данной партии лазерных диодов примерно в 1,8 раза,
что позволяет увеличить дальность действия лазерного высотомера в 1,3 раза,
т.е. до 1300 м.
. С целью снижения времени измерений и увеличения дальности
действия высотомера ДЛ-5 была проверена схема сложения мощности от двух
излучателей (с включенными микролинзами) с помощью двулучепреломляющего
кристалла - призмы из исландского шпата.
В результате измерения энергетики при длительности импульса 100 нс и
частоте 8,3 кГц амплитудная мощность на выходе макета лазерного высотомера
ДЛ-5М составила 108 Вт. Увеличение мощности излучения по отношению к лазерному
высотомеру ДЛ-5 составило 3,6 раза. Дальность действия высотомера ДЛ-5 при
такой мощности увеличилась в 1,9 раза и составила 1900 м.
. Получены сравнительные характеристики ДЛ-5 и ДЛ-5М.
Сравнительные технические характеристики
|
ДЛ-5М
|
ДЛ-5
|
|
Длина волны излучения
|
905 нм
|
|
Ширина диаграммы
направленности передающего канала
|
не более 0,003х0,001 рад
|
|
Диапазоны измеряемой
дальности при МДВ не менее 5 км
|
0.5-200 м 200-1900 м
|
2-200 м 200-1000 м
|
|
Среднеквадратическое
отклонение значений измеряемой дальности: диапазон 1 диапазон 2
|
не более 0,1 м не более 0,5
м
|
не более 0,5 м не более 2
м
|
|
Измерение скорости снижения
при посадке летательного аппарата
|
Не менее 2 м/c
|
-
|
|
Среднеквадратическое
отклонение значений скорости при посадке летательного аппарата
|
Не более 0,2
м/c
|
-
|
|
Частота выдачи информации о
дальности: диапазон 1 диапазон 2
|
не менее 50 Гц не менее 10
Гц
|
|
Интерфейс связи
|
RS-232
|
|
Габаритные размеры
|
88x87x40 мм
|
|
Масса
|
не более 0,2 кг
|
. В результате расчетов был определен класс лазерной опасности для
высотомера и определены средства защиты при работе с данным прибором.
. ДЛ-5М не содержит мощных источников электромагнитного излучения,
способных оказывать влияние на экосистемы.
. Предложенные в работе методы увеличения диапазона измеряемой
дальности с 1000 м до 1900 м, приводят к удорожанию высотомера ДЛ-5 на 27,46 %
при серийном производстве.
Список
литературы
1. Балашов
И.Ф. Энергетическая оценка импульсных лазерных дальномеров (Пособие по методике
инженерного расчета). СПбГИТМО, 2000. - 19 с.
. Визнюк
А.С. Кошелев Б.В. Изучение возможности построения малогабаритного лазерного
высотомера-дальномера для БПЛА./5-я международная конференция «Авиация и
космонавтика - 2006» // Тезисы докладов. Секция «Беспилотные летательные
аппараты». М.:2006. - с. 215-224.
. Вильнер
В.Г., Ларюшин А.И., Рудь Е.Л. Оценка возможностей светолокационного импульсного
измерителя с накоплением. М.: Фотоника, 2007, №6. - с. 22-26.
. Вильнер
В.Г., Волобуев В.Г., Казаков А.А. Пути достижения предельной точности лазерного
скоростимера. М.: Мир измерений, 2010, №7. с.17-21.
. Вильнер
В.Г., Ларюшин А.И., Рудь Е.Л. Методы повышения точности импульсных лазерных
дальномеров. М.: Электроника. Наука, технология, бизнес, 2008, №3. - с.118-123.
. Вильнер
В.Г., Ларюшин А.И., Рябокуль А.С. Достоверность измерений импульсного лазерного
дальномера. М.: Фотоника. 2013, №3. - с.42-60.
. Волохатюк
В.А., Кочетков В.М., Красовский Р.Р. Вопросы оптической локации / Под ред. Р.Р.
Красовского. М.: Советское радио, 1971. - 256 с.
. Гмурман
В.Е. Теория вероятности и математическая статистика. - М.: Высшая школа, 1977.
- 480 с.
. Горелик
А.Л., Барабаш Ю.Л., Кривошеев О.В., Эпштейн С.С.; Под ред. А.Л. Горелика.
Селекция и распознавание на основе локационной информации - М.: Радио и связь,
1990. - 240 с.
. Ермаков
Б.А., Возницкий М.В. Получение и обработка информации в импульсных лазерных
дальномерах. Л.: Оптический журнал, №10, 1993. - с. 15-32.
. Козинцев
В.И., Белов М.Л., Орлов В.М. Основы импульсной лазерной локации. Учебное
пособие. М.: МГТУ им. Н.Э.Баумана, 2006. - 512с.
. Ландсберг
Г.С. Оптика. М.: Наука, 1976. - 928 с.
. Ларюшин
А.И. Оптоэлектроника в промышленности и медицине. Казань: Абак, 1997. - 478 с.
. Ларюшин
А.И., Вильнер В.Г., Рудь Е.Л. Модифицированное устройство временной привязки
импульсного лазерного дальномера для летательных аппаратов. М.: Электроника и
электрооборудование транспорта, №2, 2008. - с.23-26.
. Малашин
М.С., Каминский Р.П., Борисов Ю.Б. Основы проектирования лазерных локационных
систем: Учеб. пособие для радиотехн. спец. Вузов. - М.: Высш. Школа, 1983. -
207 с.
. Ширман
Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на
фоне помех. - М.: Радио и связь, 1981.
17. Филачев А.М., Таубкин
И.И., Тришенков М.А. <http://www.livelib.ru/author/203955> Твердотельная
фотоэлектроника. Физические основы. - Издательство: Физматкнига
<http://www.ozon.ru/context/detail/id/2782598/>, 2005.
. Фоньков И.В.
Электромагнитное загрязнение окружающей среды. Современные проблемы технических
наук: сб. тез. докл. Новосиб. межвуз. науч. студ. конф. "Интеллектуальный
потенциал Сибири", Новосибирск, 19-20 мая 2004 г. Ч.2. - Новосибирск:
ИГАСУ, 2004. - 73 c.
. Тюлин А., Астапенко
С., Методика определения допустимой стоимости разработки и серийного
производства, - ВНИИНС 2001 г.