Проектирование режима торможения противовключения до полной остановки
Содержание
Введение
Описание
элементов системы
Описание
объекта управления
Описание
микроконтроллера Atmega 128
Описание
системы индикации
Светодиоды
Семисегментный
индикатор
Кнопки
Алгоритм
управления и исследуемого режима работы
Формализация
задачи и кодирование входных и вых сигналов
Заключение
Используемая
литература
Приложение
Программа управления объектом
торможение противовключение
микроконтроллер
Введение
Исследование режима торможения противовключения
до полной остановки.
Объект: «Двигатель постоянного тока с
независимым возбуждением»
Цель: исследовать режим торможения до полной
стадии остановки двигателя постоянного тока с независимым возбуждением; пульт
оператора представляет из себя матричную клавиатуру 3х8 и содержит 1 кнопку на
2 положения, 9 светодиодов и семисегментный индикатоа.
В данной курсовой работе было спроектировано
устройство управления двигателем постоянного тока с независимым возбуждением
содержащее:
Микроконтроллер Атmega128 (Atmel)
кнопка на клавиатуре
светодиодов
Семисегментный индикатор
Объектом управления является двигатель
постоянного тока с независимым возбуждением. Исследуемый режим работы -
торможение противовключения до полной остановки.
Описание элементов системы
Описание объекта управления
Электродвигатель постоянного тока (ДПТ) -
электрическая машина постоянного тока, преобразующая электрическую энергию
постоянного тока в механическую энергию.
Двигатель постоянного тока приводится в движения
за счет взаимодействия магнитных полей неподвижной (обмотка возбуждения) и
подвижной (якорь) частей. На обмотку возбуждения и якорь подается постоянный
электрический ток. В зависимости от схемы подключения различают подключение с
независимым, последовательным и параллельным возбуждением.
В данном курсовом проекте рассматривается только
двигатель постоянного тока с независимым возбуждением. Для запуска двигателя
подают напряжение на обмотку возбуждения и на якорь (замкнуть ключи К1 и К2).
В устройстве преобразования сигналов аналоговые
сигналы к1, к2, к3, V1 преобразовываются в цифровые к11, к22, к33, V11.
Схема подключения двигателя постоянного тока с
независимым возбуждением приведена на рис. 1
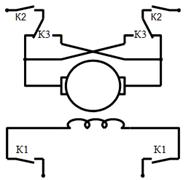
Рисунок 1 - Схема подключения двигателя
Описание исследуемого режима
Как уже говорилось выше, в данной курсовой
работе необходимо исследовать режим торможения противовключения до полной
остановки двигателя постоянного тока с независимым возбуждением.
Существуют два вида торможения противовключением
для ДПТ НВ.
. При активном статическом моменте, когда в цепь
якоря вводят большое добавочное сопротивление R1 . Ток якоря в этом случае
уменьшается, момент двигателя М становится меньше статического момента Мcа и
двигатель начинает снижать обороты, а затем под влиянием Мcа реверсируется и
разгоняется в направлении, противоположном действию момента двигателя (рис.2,
прямая вг).

Рис.2. Механические характеристики ДПТ НВ при
торможении противовключением
Ток в режиме торможения противовключением по
мере снижения оборотов увеличивается, поскольку с изменением направления
вращения ω< 0 э. д. с. изменит
свой знак (участок вг) и будет действовать согласно с напряжением сети,
вследствие чего ток станет равным Iя = (Uн+Е)/Rяц и растет до значения, при
котором тормозной момент достигает величины Мcа. Наступит установившийся режим
торможения при -ωе.
 )
)
. При реактивном статическом моменте
торможение противовключением получают путем изменения полярности напряжения на
зажимах якоря. В этом случае ток Iя = (-Uн-Е)/Rяц меняет свое направление и
момент двигателя становится тормозным. Для ограничения тока при торможении
противовключением по условиям коммутации или допустимым ускорениям включают
добавочное сопротивление в цепь якоря. Тогда уравнение ЭМХ двигателя в режиме
торможения противовключением получим из уравнения () и после
подстановки в него -Uн получим
ω =- ωо-
Iя*Rяц/(К*Фн)
Характеристика проходит через wо и
wс (рис.2).
Если при ω = 0; Мc1
< Мк, то двигатель изменит направление вращения (реверс) и станет вращаться
с частотой ωс1 .
Если при ω = 0, Мc1
> Мк , то якорь двигателя будет обтекаться током, оставаясь в неподвижном
состоянии, поскольку ток якоря Iя меньше Iс.
Сравнение энергетических показателей
динамического торможения и торможения противовключением показывает, что потери
электроэнергии в якорной цепи в режиме противовключением относятся к потерям
при динамическом торможении, как 3:1, а при реверсе - 4:1.
Описание микроконтроллера ATmega 128
К числу особенностей
микроконтроллера относятсяпамять программ объемом 128 Кбайт (число циклов
стирания/записи не менее 1000);
оперативная память (статическое ОЗУ)
объемом 4 Кбайт
память данных на основе ЭСППЗУ
(EEPROM) объемом 4 Кбайт (число циклов стирания/записи не менее 100000);
возможность защиты от чтения и
модификации памяти программ и данных;
возможность программирования
непосредственно в системе через последовательные интерфейсы SPI и JTAG;
возможность самопрограммирования;
возможность внутрисхемной отладки в
соответствии со стандартом IEEE 1149.1 (JTAG);
различные способы синхронизации:
встроенный RC-генератор с внутренней или внешней времязадающей RC-цепочкой или
с внешним резонатором; внешний сигнал синхронизации;
наличие нескольких режимов
пониженного энергопотребления;
наличие детектора снижения
напряжения питания
возможность программного снижения
частоты тактового генератора.
Характеристики процессора
полностью статическая архитектура;
минимальная тактовая частота равна нулю;
АЛУ подключено непосредственно к
регистрам общего назначения;
большинство команд выполняется за
один машинный цикл;
многоуровневая система прерываний;
поддержка очереди прерываний;
наличие програмного стека;
наличие аппаратного умножителя.
Характеристики подсистемы
ввода/вывода
программное конфигурирование и выбор
портов ввода/вывода;
выводы могут быть запрограммированы
как входные или как выходные независимо друг от друга;
возможность подключения ко всем
входам внутренних подтягивающих резисторов;
Периферийные устройства
-разрядные таймеры/счетчики (таймеры
Т0 и Т2)
-разрядные таймеры/счетчики (таймеры
Т1 и Т3)
сторожевой таймер WDT
генераторы сигнала с ШИМ
разрядностью 8 бит (один из режимов работы 8-разрядных таймеров/счетчиков Т0 и
Т2)
одно- двух- и трехканальные
генераторы сигнала с ШИМ регулируемой разрядности (один из режимов работы
16-разрядных таймеров/счетчиков Т1 и Т3)
аналоговый компаратор
многоканальный 10-разрядный АЦП, как
с несимметричными, так и с дифференциальными входами
полнодуплексный универсальный
синхронный/асинхронный приемопередатчик (USART)
последовательный синхронный
интерфейс SPI
последовательный двухпроводный
интерфейс TWI
Архитектура ядра
Ядро микроконтроллера выполнено по
усовершенствованной RISC-архитектуре. Арифметико-логическое устройство,
выполняющее все вычисления, подключено непосредственно к 32 регистрам общего
назначения. Благодаря этому АЛУ выполняет одну операцию за один машинный цикл.
Практически каждая из команд (за исключением команд, у которых одним из
операндов является 16-разрядный адрес) занимает одну ячейку памяти программ.
Для повышения быстродействия в ядре
используется технология конвейеризации. Конвейеризация заключается в том, что
во время исполнения текущей команды производится выборка из памяти и дешифрация
кода следующей команды. На рис3.2 изображен корпус микроконт-ра ATmega128.

Рисунок 3.2 - Расположение выводов
микроконтроллера Atmega128
A (PA7..PA0), Port B (PB7..PB0),
Port C (PC7..PC0), PortD(PD7..PD0). 8-разрядные двунаправленные порты со
встроенными нагрузочными резисторами. Выходные буферы обеспечивают ток 20 мА. .
Вход сброса. Для выполнения сброса необходимо удерживать низкий уровень на
входе более 50 нс., XTAL2. Вход и выход инвертирующего усилителя генератора
тактовой частоты., RD. Стробы записи и чтения внешней памяти данных.. Строб
разрешения фиксации адреса внешней памяти. Строб ALE используется для фиксации
младшего байта адреса с выводов AD0-AD7 в защелке адреса в течение первого
цикла обращения. В течение второго цикла обращения выводы AD0-AD7 используются
для передачи данных.. Напряжение питания аналого-цифрового преобразователя.
Вывод подсоединяется к VCC через низкочастотный фильтр.. Вход опорного
напряжения для аналого-цифрового преобразователя. На этот вывод подается
напряжение в диапазоне между AGND и AVCC.. Это вывод должен быть подсоединен к
отдельной аналоговой земле, если она есть на плате. В ином случае вывод
подсоединяется к общей земле.. Вывод разрешения программирования через
последовательный интерфейс. При удержании сигнала на этом выводе на низком
уровне после включения питания, прибор переходит в режим программирования по
последовательному каналу.СС, GND. Напряжение питания и земля
Организация памяти
В микроконтроллере ATmega 128
реализована Гарвардская архитектура, в соответствии с которой разделены не
только адресные пространства памяти программ и памяти данных, но также и шины
доступа к ним.
Обобщенная карта памяти
микроконтроллера приведена на рис. 3.3
Память программ предназначена для
хранения команд, управляющих функционированием контроллера. Память программ
также часто используется для хранения таблиц констант, не меняющихся во время
работы программы.
Рисунок 3.3 - Обобщенная карта памяти
микроконтроллера
Память программ представляет собой электрически
стираемое ППЗУ (FLASH-ПЗУ). В связи с тем, что длина всех команд кратна одному
слову (16 бит), память программ имеет 16-разрядную организацию. Логически
память программ разделена на две части - область прикладной программы и область
загрузчика. В последней может располагаться специальная программа, позволяющая
микроконтроллеру самостоятельно управлять загрузкой и выгрузкой прикладных
программ.
Для адресации памяти программ используется
счетчик команд (PC - Program Counter). Размер счетчика команд составляет 16
разрядов.
По адресу $0000 памяти программ находится вектор
сброса. После Инициализации микроконтроллера выполнение программы начинается с
этого адреса. Начиная с адреса $0002 памяти программ, располагается таблица
векторов прерываний.
Если прерывания в программе не используются либо
таблица векторов прерываний располагается в области загрузчика, то программа
может начинаться непосредственно с адреса $0001.
Регистр RAMPZ расположен по адресу $3B($5B) в
памяти данных.ПЗУ, используемое в микроконтроллере ATmega, расчитанно как
минимум на 1000 циклов стирания/записи.
Память данных.
Память данных микроконтроллера разделена на три
части: регистровая память оперативная память (статическое ОЗУ) и
энергонезависимое ЭСППЗУ (EEPROM).
Регистровая память включает 32 регистра общего
назначения, объединенных в файл, и служебные регистры ввода/вывода.
В области регистров ввода/вывода располагаются
служебные регистры, а также регистры управления периферийными устройствами,
входящими в состав микроконтроллера.
Регистры общего назначения
В микропроцессоре ATmega 128 все 32 регистра
общего назначения непосредственно доступны АЛУ. Благодаря этому любой регистр
общего назначения может использоваться во всех командах и как операнд источник
и как операнд приемник. Такое решение (в сочетании с конвейерной обработкой)
позволяет АЛУ выполнять одну операцию за один машинный цикл.
Последние шесть регистров общего назначения
могут также объединяться в три 16-разрядных регистра X, Y, и Z, используемых в
качестве указателей при косвенной адресации памяти данных.
Каждый регистр имеет свой собственный адрес в
памяти данных.
Регистры ввода/вывода
Все регистры ввода/вывода можно разделить на две
группы - служебные регистры и регистры, относящиеся к конкретным периферийным
устройствам.