Прості ланки
Зміст
1. ПРОСТІ ЛАНКИ
.1 Пропорційна ланка
.2 Інтегруюча ланка
.3 Диференційна ланка
. ЛАНКИ ПЕРШОГО ПОРЯДКУ
.1 Інерційна ланка
.2 Форсуюча ланка
.3 Інерційно-форсуюча ланка
. ЛАНКИ ІІ-ГО ПОРЯДКУ
.1 Коливна ланка
. ОСОБЛИВІ ЛАНКИ ЛІНІЙНИХ
СИСТЕМ АВТОМАТИЧНОГО КЕРУВАННЯ
.1 ОСОБЛИВОСТІ ХАРАКТЕРИСТИК
ДЕЯКИХ ЛІНІЙНИХ ЗВ’ЯЗКІВ
.2 СТІЙКІ НЕМІНІМАЛЬНО-ФАЗОВІ
ЗВЯЗКИ
.3. Нестійкі зв’язки
СПИСОК ВИКОРИСТАНОЇ ЛІТЕРАТУРА
1. ПРОСТІ ЛАНКИ
1.1
Пропорційна ланка
Найбільш простою являється ланка,
вихідна величина котрого прямо пропорційна вхідній величині. Рівняння такої
ланки:

де к - коефіцієнт підсилення ланки.
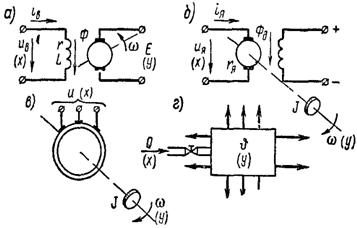
Прикладом такої ланки являються:
дільник напруги (а), підсилювач постійного струму (б), ричажна передача (в),
редукторна передача (г) та інші.
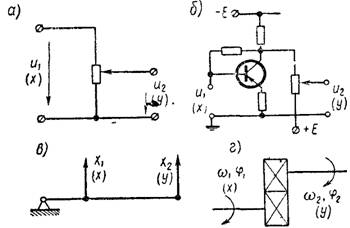
Вважається, що передача сигналу від
входу до виходу проходить миттєво без якої-небудь інерції. Тому пропорційні
ланки називаються безінерційними.
Якщо на вхід пропорційної ланки
подати синусоїдальний сигнал
то на виході появиться сигнал
Де 
В комплексній формі
 або
або
комплексний коефіцієнт
підсилення

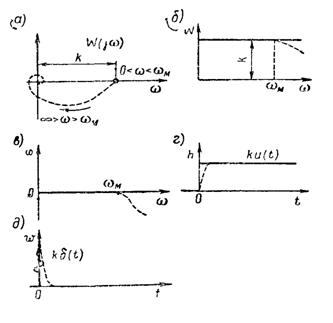
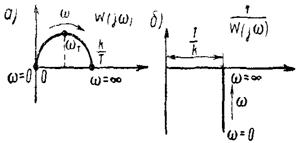
Годограф комплексного
коефіцієнта підсилення W(jω) при  має вид
точки, сдвинутої на відстань к від нуля по дійсній осі (а).
має вид
точки, сдвинутої на відстань к від нуля по дійсній осі (а).
Прийнятий опис зв’язку між
входом і виходом відповідає ідеальній ланці, а для реальної ланки справедливо
тільки при частотах, менших визначеної максимальної величини 
При більш високих частотах
прийнятий математичний опис ланки перестане бути справедливим і коефіцієнт
підсилення, за рахунок малих не врахованих параметрів зменшується до нуля.
Для дільника напруги таким
малим параметром може бути ємність вихідних проводів; для підсилювача -
розподільник ємності і індуктивності кола; для механічної передачі - міцність
ричагів і валів. Тому при збільшенні ω до
безконечності коефіцієнт підсилення любої реальної ланки зменшується до нуля і
годограф коефіцієнта підсилення при  має характер графіка, показаного на
рис (а) пунктиром.
має характер графіка, показаного на
рис (а) пунктиром.
Однак в системах автоматичного
управління зазвичай розглядається діапазон порівняно низьких частот, для котрих
< ω <
 і всі
розглянуті прилади можуть бути віднесені до категорії пропорційних (без
інерційних) ланок, а годограф коефіцієнта підсилення має вигляд точки к.
і всі
розглянуті прилади можуть бути віднесені до категорії пропорційних (без
інерційних) ланок, а годограф коефіцієнта підсилення має вигляд точки к.
Відповідні
амплітудно-частотні і фазочастотні характеристики показані на мал.(6) і (в).
В дальнішому під пропорційною
будемо розуміти таку ідеальну ланку, в якій постійність коефіцієнта підсилення
може бути прийнято в цілому діапазоні частот
Переходячи від коефіцієнта
підсилення до передаточної функції

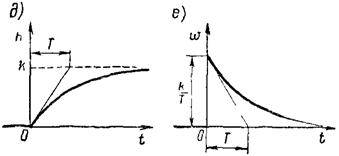
а потім до перехідної і
вагової функціям, отримаємо
Графічне зображення
перехідної і вагової функцій пропорційної ланки показано на мал. (г) і (д). Обі
ці функції відповідають ідеальній пропорційній ланці. Реальні ланки, схеми яких
зображені на рисунку, мають характеристики, які приблизно описуються цими
графіками. Відхилення реальних характеристик від ідеальних на графіках показано
пунктиром.
1.2
Інтегруюча ланка
Існує ряд ланок, в яких
вхідна величина пропорційна або рівна інтегралу по часу від вхідної величини

де k - деякий коефіцієнт
пропорційності.
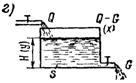
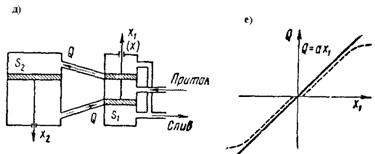
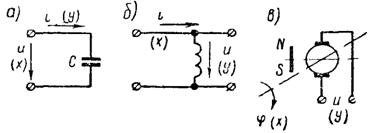
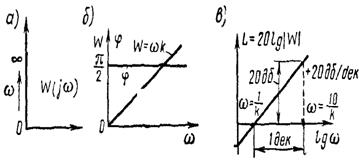
Приклад. Прикладами реальних
елементів, еквівалентні схеми яких зводяться до інтегруючої ланки, являються:
електрична ємність (а), індуктивність (б), обертаючий вал (в), гідравлічний
резервуар (г), гідравлічний підсилювач (мал. 3.5,а).

Напруга на ємності
магнітний потік в
індуктивності
кут повороту вала
рівень води в гідравлічному
резервуарі
де i - струм в ємності С, u -
напруга на котушці з числом витків w, ω - кутова
швидкість обертання вала, Q-G - результуючий приток води в резервуар з
поверхністю S.
Інтегруючою ланкою може бути
приблизно описаний і гідравлічний підсилювач. Переміщення поршня золотника  , приводить
до зміни притока і зливу рідини Q в робочому циліндрі і відповідно - до
переміщення робочого поршня
, приводить
до зміни притока і зливу рідини Q в робочому циліндрі і відповідно - до
переміщення робочого поршня  відносно початкового положення
відносно початкового положення  .
.
Залежність між і Q при
постійності тиску в циліндрах системи представлена графіком, показаним на мал.
(е) пунктиром. Приблизно цей графік може бути замінений прямою  , зображено
на малюнку сполошною лінією.
, зображено
на малюнку сполошною лінією.
Із умови нестикаємості рідини
отримаємо що

де - площа
робочого поршня.
- площа
робочого поршня.
І, відповідно,

або
 і
і 
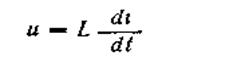
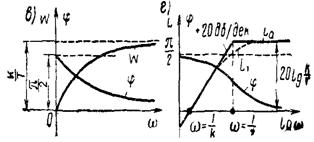
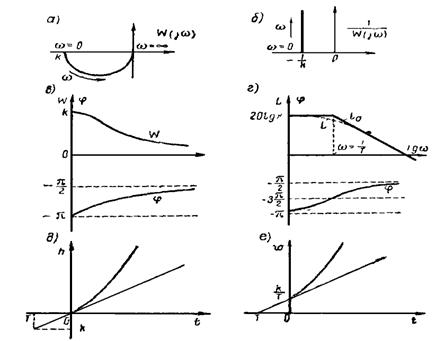
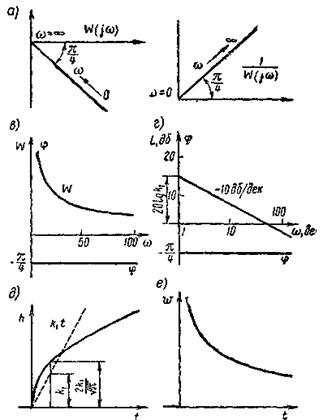
Комплексний коефіцієнт
підсилення інтегруючої ланки
Частотний годограф (а) і частотні
характеристики (б) інтегруючої ланки показані на рисунку
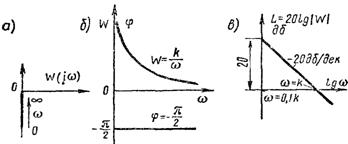

Логарифмічна
амплітудно-частотна характеристика  функції
функції має вид
прямої з нахилом - 20 дб/дек, т. є. при зміни частоти в 10 раз
має вид
прямої з нахилом - 20 дб/дек, т. є. при зміни частоти в 10 раз зменшується
на 20 Дб (мал. в). Графік
зменшується
на 20 Дб (мал. в). Графік для
інтегруючої ланки перетинає вісь абсцис при
для
інтегруючої ланки перетинає вісь абсцис при
Перехід від коефіцієнта
підсилення передаточної функції

а потім - до перехідної і
вагової функціям, отримаємо


рис (г) і (д).
1.3
Диференційна ланка
Не існує такого реального
елемента, в якого на виході точно відтворилася б похідна від любого вхідного
сигналу. Однак при складанні структурної схеми системи її можна так розділити
на ланки, що введені поняття диференційної ланки буде повністю обосновано.
В даному випадку вихідна
величина y залежить від вхідної величини як похідна
як похідна
де - коефіцієнт
пропорційності.
- коефіцієнт
пропорційності.
Приклад Прикладами таких
ланок можуть бути електрична ємність (а), індуктивність (б), електричний
тахометр (в).
Струм в ємності
Напруга на індуктивності
і напруга на за жимах
тахометричного генератора постійного струму

пропорційні похідним від
напруги, струму та кута повороту вала.
Комплексний коефіцієнт
підсилення

Всі частотнї характеристики
ланки показані на рис а, б, в.

Логарифмічна
амплітудно-частотна характеристика має додатній нахил в
Передаточна функція
диференційної ланки

а відповідно перехідна і
вагова функції
рис (г) і (д).
Похідна від  - функції
або
- функції
або  - функція
другого порядку
- функція
другого порядку на мал. (д)
зображена у вигляді двох імпульсів другого порядку, інтервал між якими
на мал. (д)
зображена у вигляді двох імпульсів другого порядку, інтервал між якими  прямує до
нуля.
прямує до
нуля.
2. ЛАНКИ ПЕРШОГО ПОРЯДКУ
2.1
Інерційна ланка
Одним із найбільш поширених ланок
системи автоматичного управління являється інерційна ланка. Вона описується
рівнянням

де і T -
відповідно коефіцієнт підсилення і постійна часу ланки.
і T -
відповідно коефіцієнт підсилення і постійна часу ланки.
Приклад. При лінеаризації
рівнянь прикладами інерційних ланок можуть бути виконуючі механізми (а),
електронні і магнітні підсилювачі (б,в) а також чотирьохполюсники, до складу
яких входять індуктивності або ємності (г).
Аналогічно із рівняння для
печі
Вважаючи що 
 ,
,  і
і  , отримаємо рівняння
, отримаємо рівняння
Розглядаючи схеми
чотирьохполюсників показаних на мал, легко переконатися що для них також
справедливо рівняння ланок.
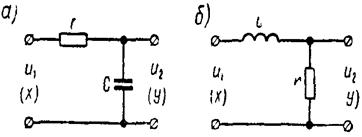
Для них k=1, Т = rC або  , а
, а  і
і  .
.
Перейдемо від миттєвих
значень до частотних спектрів або до гармонічних сигналів

Частотні характеристики для
цієї функції показані на мал а,б,в.
Тут


Поряд з характеристикою інколи буває
зручно користуватися інверсною характеристикою
інколи буває
зручно користуватися інверсною характеристикою 
Для інерційної ланки така
характеристика показана на мал (6).
Якщо характеристика  має вид
типічної кругової діаграми, в четвертім квадранті і опираючися на діаметр
має вид
типічної кругової діаграми, в четвертім квадранті і опираючися на діаметр то інверсна
характеристика має вид прямої, що уходить із точки
то інверсна
характеристика має вид прямої, що уходить із точки  в
безкінечність паралельно уявній осі.
в
безкінечність паралельно уявній осі.
Для побудови логарифмічної
амплітудно-частотної характеристики виразимо її через

Ця залежність показана на
мал. 3.11, г пунктиром і позначена
При побудові логарифмічних
характеристик користуються також їх асимптотними приближеннями. Для інерційної
ланки асимптотне приближене отримується шляхом заміни точної характеристики її
двома асимптотами при  і при
і при  . Перша
асимптота отримується шляхом відкидування
. Перша
асимптота отримується шляхом відкидування  у виразі, а друга - шляхом
відкидування одиниці.
у виразі, а друга - шляхом
відкидування одиниці.
Для ЛАЧХ асимптотна
характеристика описується двома рівняннями:
На мал (г) характеристика показана
суцільною лінією (паралельній осі абсцис при
показана
суцільною лінією (паралельній осі абсцис при 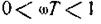 і маючи
нахил 20 дб./,дек. при
і маючи
нахил 20 дб./,дек. при 
Передаточна функція
інерційної ланки відповідно
Відповідно перехідна функція

Вагова функція

Графіки перехідної і вагової
функцій інерційної ланки показані на мал. (д) і (е).
2.2
Форсуюча ланка
Ланка, яка описується
диференціальним рівнянням

називається форсуючою ланкою.
Така ланка отримується в
результаті різних паралельних з'єднань пропорційної і диференціальної або
інерційної ланок.
Для цієї ланки отримаємо:

Частотні характеристики
форсуючої ланки показані на мал.
Як видно із графіка, пряма
амплітудно-фазова характеристика форсуючої ланки аналогічна інверсній
характеристиці інерційної ланки, а інверсна його характеристика відповідає
прямій характеристиці інерційної ланки.


Це відповідно відображається
і на амплітудних і фазових характеристиках.
Передаточна функція форсуючої
ланки

і може бути представлена у
вигляді суми передаточних функцій пропорційної і диференціюючої ланок.
Перехідна і вагова функції
форсуючої ланок мають вид суми відповідних функцій простіших ланок:
2.3
Інерційно-диференціююча ланка
Описується диференціальним
рівнянням

і називається реальною
диференціюючою ланкою.
Прикладом такої ланки
являється механічна система з гнучким гідравлічним зв'язком і
чотирьохполюсники, до яких входять відповідним чином включені активні і
реактивні опори.
ланка
індуктивність функція частотний
Пєреходячи від миттєвих
значень до частотних спектрів, отримаємо

Частотні характеристики для
цієї функції показні на мал.

Асимптотні характеристики
складаються із двох пів прямих:

Передаточна функція
інерційно-диференціюючої ланки відповідно

Проводячи зворотне
перетворення Лапласа, отримаємо

Після диференціювання виразу
маємо

Якщо експериментально
отримані частотні характеристики інерційної або інерційно-диференціюючої ланки,
то по цим характеристикам безпосередньо можуть бути знайдені значення і
і
Із АЧХ інерційної та
інерц.-форсуючої ланки видно, що фазовий здвиг, рівний куту - , між
сигналами входу і виходу має місце при
, між
сигналами входу і виходу має місце при  , коли
, коли .
.
Із цієї умови визначається 
Коефіцієнт знаходиться
по діаметру кола частотної характеристики.
знаходиться
по діаметру кола частотної характеристики.
Значно частіше буває
необхідним знайти параметри ланки по перехідній характеристиці, отриманої
експериментально. В цьому випадку краще шляхом числового або графічного
диференціювання найти  і построїти
криву перехідного процесу в координатах h, ω.
і построїти
криву перехідного процесу в координатах h, ω.
Виходячи із рівняння ланок це
буде пряма, яка проходить через початок координат для інерційно-диференціюючої
ланки (1 на мал.) і через точку  -для інерційної ланки (2 на мал.).
-для інерційної ланки (2 на мал.).
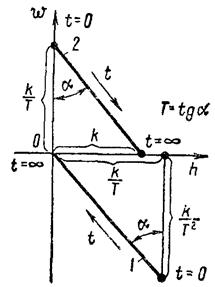
Тангенс кута нахилу прямих
дає Т. Величина k для інерційної ланки знаходиться по значенню h при  , а для
інерційно-диференціюючої - по початковому значенню
, а для
інерційно-диференціюючої - по початковому значенню  .
.
2.3
Інерційно-форсуюча ланка
Інерційно-форсуючою
називається ланка що описується диференціальним рівнянням першого порядку в
найбільш загальному вигляді

Суттєвим параметром
інерційно-форсуючої ланки є коефіцієнт  .
.
Якщо  , то ланка
по своїм властивостям близька до інтегруючої та інерційної ланки. Якщо ж
, то ланка
по своїм властивостям близька до інтегруючої та інерційної ланки. Якщо ж  >1, то
ланка - близька до диференціюючої і інерційно-диференціюючої ланкам.
>1, то
ланка - близька до диференціюючої і інерційно-диференціюючої ланкам.
Комплексний коефіцієнт
підсилення інерційно-форсуючої ланки

а передаточна функція

Приклад електричних схем
інерційно-форсуючої ланки показаний на мал.
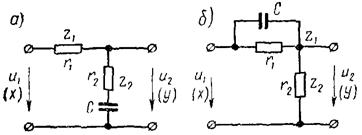
Приклад. Розглядаючи
коефіцієнт підсилення схем, показаних на мал., як коефіцієнт передачі дільника
напруги

отримаємо: для схеми (а)
де  ,
,  і
і  ;
;
для схеми (б)
Де  ,
,  ,
, 
І 
Схема (а) інколи називається
пружним інтегруючим зв’язком, а схема (б) - пружним диференційним.
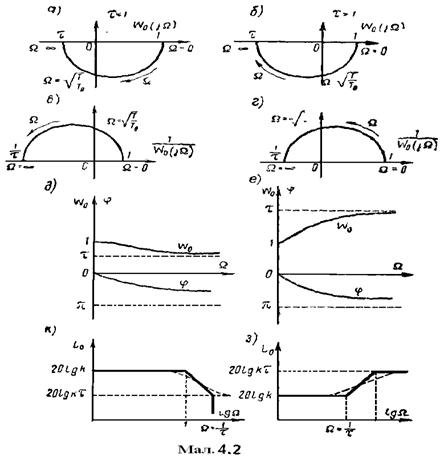
На мал. 3.19 побудовані
частотні характеристики при τ<1 (а, в, д, ж)
і τ>1
(б,
г, е, з). Характеристики побудовані для нормованих значень
в залежності від відносної
безрозмірної частоти Ω=ωT.
Тут
 ;
;
 ;
;
 .
.
Розв’язавши рівняння  , знаходимо,
що максимальний фазовий зсув
, знаходимо,
що максимальний фазовий зсув

має місце при
 .
.
Логарифмічні характеристики
виражаються рівнянням
 .
.
Асимптотичні характеристики в
залежності від величини τ виражаються
по різному:

при τ<1

при τ>1
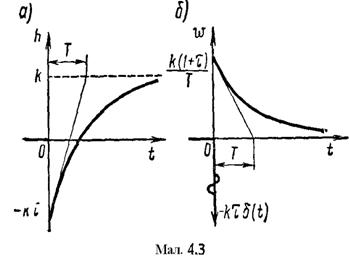
Перехідна функція
визначається із рівняння ланки як

і, відповідає,
 .
.
Перехідні і вагові функції
для інерційно-форсуючих зв’язків показані на мал. [при τ<1(а і
в); при τ>1(б
і г)].

3. ЛАНКИ ІІ-ГО ПОРЯДКУ
3.1
Коливна ланка
Коливаючий зв'язок описується
рівнянням другого порядку

При степені затухання ζ<1,
що
відповідає комплексним кореням характеристичного рівняння
 .
.
Постійна часу Т коливаючого
зв’язку пов’язана з його резонансною частотою  співвідношенням
співвідношенням

і в 2π разів
менше періода резонансних коливань
 .
.
Інколи рівняння записують у
вигляді
 ,
,
де  .
.
Приклад. Прикладами
коливаючого зв’язку може служити пружна механічна система з суттєвим впливом
маси чи електричний коливальний контур.

Дійсно, для пружної
механічної системи показаної на мал (а), рівняння сил, діючих на тіло з масою
М, має вид
 ,
,
Де а і б - коефіцієнти пружини і
заспокоювача. Для коливаючого контура, зображеного на мал. (б).
 .
.
Рівняння механічної системи
при  <1
<1
відповідає коливальному
зв’язку з параметрами k =1,  ,
,  ;
;
рівняння електричного контуру
при  <1
<1
відповідає коливальному
зв’язку з параметрами
 ,
,  , k =1.
, k =1.
Переходячи до гармонічних
сигналів, дістанемо комплексний коефіцієнт підсилення коливального зв’язку
 .
.
Вводячи безрозмірну частоту Ω=ωT,
можна
W  виразити
слідуючим виразом:
виразити
слідуючим виразом:
 .
.
На мал а, б, в, г показані
частотні характеристики коливаючого зв’язку.
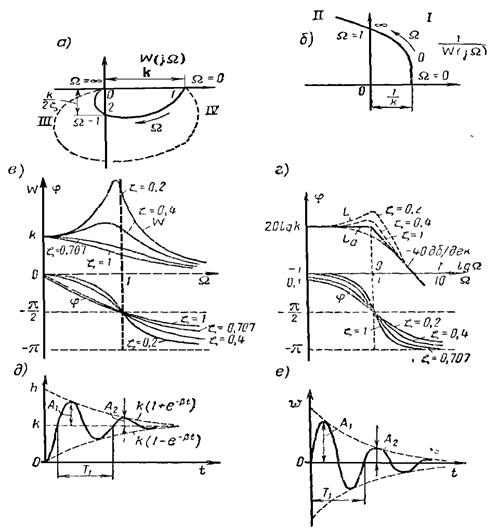
Як бачимо з мал.(а), годограф
частотної характеристики проходить через два квадранта IV i III і пересікає
уявну вісь при Ω=1,
коли
 . При цьому
. При цьому  .
.
Зі зменшенням ζ петля,
охоплена годографом, збільшується (див. пунктир), і при ζ=0 характеристика
перетворюється в дві півпрямі: 1-від W(jΩ)=k до W(jΩ)→∞ при
0<Ω<1
і
II- від W(jΩ)=−∞
до
W(jΩ)=0
при
1<Ω<∞.
Інверсна
характеристика  проходить
через два квадрата І і ІІ і відходить в ∞ паралельно дійсній осі при Ω→∞.
проходить
через два квадрата І і ІІ і відходить в ∞ паралельно дійсній осі при Ω→∞.
Якщо експериментально
одержаний частотний годограф реального зв’язку, близького до коливаючого,
параметри відповідного коливаючого зв’язку можуть бути знайдені за точками
характеристики, прилеглим на дійсній і уявних осях (точки 1 і 2 на мал.,а). На
точці 1 знаходиться k, а на точці 2 знаходиться  і
і  .
.
Амплітудно-частотна і
фазочастотна характеристики виражаються рівняннями:
 ;
;
 ;
;
При  ці
характеристики відповідно проходять через точки
ці
характеристики відповідно проходять через точки  і
і  . При
. При  крива W(Ω) має
максимум
крива W(Ω) має
максимум
при
Логарифмічна
амплітудно-частотна характеристика коливного зв’язку
 .
.
Поблизу точки резонанса  ця
характеристика сильно залежить від степені затухання ζ, однак
на відстані від резонансної частоти характеристики практично не залежать від ζ.
ця
характеристика сильно залежить від степені затухання ζ, однак
на відстані від резонансної частоти характеристики практично не залежать від ζ.
Для коливаючих зв’язків
користуються асимптотичними характеристиками


Передаточна функція
коливаючого зв’язку
 .
.
Коренями характеристичного
рівняння  будуть
будуть
 ,
,
де
 - коефіцієнт затухання;
- коефіцієнт затухання;
 - власна частота коливання зв’язка.
- власна частота коливання зв’язка.
Перехідна функція
 .
.
Вагова функція

Графіки перехідної і вагової
функцій коливаючих зв’язків зображені на мал., д і е. по експериментальним
перехідним характеристикам реального зв’язку можна знайти параметри
відповідного коливаючого зв’язку. По графіку h (t) (див. мал. д) визначають  і
вираховуються всі параметри зв’язку:
і
вираховуються всі параметри зв’язку:
 ;
;
 ;
;
 ;
;
 .
.

Ті ж величини можна знайти по
зображенню перехідного процесу на фазовій площині  , для якого
, для якого  .
.
4. ОСОБЛИВІ ЛАНКИ ЛІНІЙНИХ
СИСТЕМ АВТОМАТИЧНОГО КЕРУВАННЯ
.1 ОСОБЛИВОСТІ ХАРАКТЕРИСТИК
ДЕЯКИХ ЛІНІЙНИХ ЗВ’ЯЗКІВ
Крім розглянутих в
попередньому розділі типових лінійних зв’язків, в системах автоматичного
керування зустрічаються зв’язки, які по характеристикам суттєво відрізняються
від типових.
До числа таких відносяться:
- не мінімально-фазові
зв’язки, передаточні функції яких дробово-раціональні і мають нулі в правій
півплощині
- нестійкі зв’язки, мають
полюси в правій півплощині,
Зв’язки з розділеними параметрами,
які можуть бути розділені на
- ірраціональні зв’язки,
описуємі ірраціональними передаточними функціями,
- трансцендентними, описуючі
трансцендентними передаточними функціями.
В зв’язках з розприділеними
параметрами кількість особливостей передаточних функцій може направлятися до
безкінечності і аналіз динамічних властивостей системи очікує перегляду
допоміжних питань. Це причетне з тим, що зв’язок обписується вже не звичайними
лінійними диференціальними рівняннями, а рівняннями в часних виготівельних.
Розглянемо зв’язки кожної із
перерахованих груп і приклади реальних елементів, відповідних їм.
.2 СТІЙКІ НЕМІНІМАЛЬНО-ФАЗОВІ ЗВЯЗКИ
В ряді приладів, наприклад
при диференціальних або мостових з’єднаннях, зустрічаються зв’язки, описуючі
диференціальними рівняннями, маючі неправильні коефіцієнти в правій частині
рівняння і відповідно нулі в правій півплощині. При цьому фазовий здвиг між
входом і вихідним сигналами може перевищити  .
.
Диференціальне рівняння
стійкого не мінімально-фазового зв’язку першого порядку має вигляд
 .
.
Комплексний коефіцієнт
підсилення такого зв’язку
 ,
,
а передаточна функція
 .
.
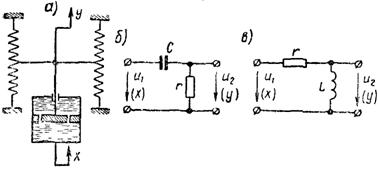
Приклад. Прикладами таких
зв’язків можуть служити мостові схеми, зображені на мал. У випадку (а) рівняння
має вид
 ;
;
а у випадку (б)
 .
.
Тут  =
= +
+ , а
, а  =-. В обох
випадках мається на увазі, що >.
=-. В обох
випадках мається на увазі, що >.
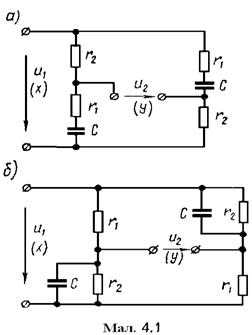
Для схеми(а) k=1,то  =С,
=С,  ,
,  <1.
<1.
Для схеми (б)  <1,
<1,  ,
,  , >1
, >1
На мал. вистроєні частотні
характеристики розглянутого зв’язку.
Вистроювання виконано для
нормування характеристик  і
і  при <1 і >1.
при <1 і >1.
Як видно з побудови, при<1 і >1
частотні годографи лежать в третьому і четвертому квадрантах, маючи вид
півкругів. Відповідно інверсні характеристики представляють собою півкруги
лежачі в першому і другому квадрантах.
При різноманітному
розташуванні годографів W(jΩ) для
інерційно-форсуючого і немінімально-фазового розглянутого зв’язку їх
амплітудно-частотні характеристики аналогічні. Дійсно, в розглянутому випадку
 ,
,
що повністю співпадає з
формулою для інерц.-форсуючої ланки.
Відповідно аналогічні і
логарифмічні амплітудно-частотні характеристики.
Для фазочастотних
характеристик
 ,
,
що суттєво відрізняється від
інерц.-форсуючої ланки.
Таким чином, при спів паданні
амплітудно-частотних характеристик мінімально-фазових і не мінімально-фазових
зв’язків їх фазочастотні характеристики не співпадають.
Це дуже важливе становище
необхідно завжди мати на увазі при визначенні фазочастотної характеристики при
відомій амплітудно-частотній.
По передаточній функції може
бути знайдена перехідна функція (мал, а)
І вагова функція
 .
.
Із малюнка видно, що h(t) в
залежності від часу змінює знак, однак на відміну від аналогічних характеристик
мінімально-фазових зв’язків величина τ не приділяє
такого суттєвого впливу на хід кривих h(t) і ω(t).
4.3
Нестійкі зв’язки
 .
.
Передаточна функція
 .
.
Рівняння і відрізняються від
(3.60) і (3.62) лише знаком при . Всі види зв’язків першого порядку
можна описати одним і тим же рівнянням, якщо врахувати, що при >0 і>0
зв'язок - мінімально-фазове типове; при >0 не залежно від знака зв'язок-
нестійке.
. Всі види зв’язків першого порядку
можна описати одним і тим же рівнянням, якщо врахувати, що при >0 і>0
зв'язок - мінімально-фазове типове; при >0 не залежно від знака зв'язок-
нестійке.
На мал. зображені приклади
нулів і полюсів передаточних функцій зв’язків першого порядку при різних знаках
і в рівнянні.
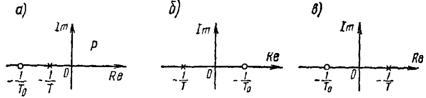
Найбільш поширеним прикладом
нестійкого зв’язку являється квазіінерційний зв'язок, для якого =0. В цьому
випадку, в залежності від випадку позитивних напрямків x і y дістаємо
 . (4.12)
. (4.12)
або
 . (4.13)
. (4.13)
Приклад. Прикладом нестійкого
зв’язку може бути асинхронний двигун в деяких особливих режимах роботи.
Комплексний коефіцієнт
підсилення нестійкого квазі-інерційного зв’язку
 ,
,
а передаточна функція
 ,
,
Годографи амплітудно-фазової
характеристики нестійкого квазиінерційного зв’язку зображений на мал. 4.5,а і
б.
Як видно із побудови, прямої
і інверсної годографи комплексного коефіціента підсилення представляють собою
зеркальні відображення відносно уявної осі годографів, дістаних для інерційного
зв’язку.
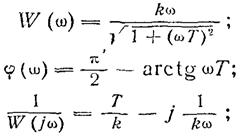
Амплітудно-частотна
характеристика має тот же вираз, що і для типового інерційного зв’язку
 .
.
Таким чином, графіки W
(ω) і
L (lg ω)
розглядуючого
нестійкого зв’язку нічим не відрізняються від аналогічних графіків типового
інерційного зв’язку. Фазочастотна характеристика
 .
.
Ця залежність (мал. (в) і
(г)) представляє собою дзеркальне відображення фазочастотної характеристики
інерційного зв’язку відносно прямої  , відповідно уявній осі.
, відповідно уявній осі.
Із перегляду отриманих
частотних характеристик можна зробити висновок, що нестійкі зв’язки можуть мати
точно такі ж амплітудно-частотні характеристики, як і стійкі зв’язки, однак при
цьому фазо-частотні характеристики суттєво відрізняються
По передаточній функції може
бути знайдена перехідна функція (мал.,д)

і вагова функція (мал. ,е)
Для лінійних нестійких
зв’язків не існує установленого режиму, і з протягом часу при любій вхідній
величині вихідна величина направляється до нескінченності.
Зв’язок з розподіленими
параметрами, описаний одномірним рівнянням теплопровідності Фур’є

де υ =υ
(r, t), - величина,
залежна від просторової координати r і часу t, має ірраціональну передаточну
функцію, вид якої суттєво залежить від граничних умов, враховуючих вхідний
сигнал і місце зняття вихідного сигналу.
Переглядаючи величину v як
синусоїдально змінюючу з частотою ω , тобто υ =
Im V(jωt), фазор
якої
 ,
,
рівняння можна представити
наступним чином:

Це однорідне диференціальне
рівняння, маюче корені характеристичного рівняння 

Рішення рівняння (4.22) має
вигляд

де А і В - коефіціенти,
залежні від граничних умов.
Якщо граничною умовою
являється Vm = 0 при r→∞ , то В = 0 і
Найбільш характерні три
випадки прикладання вхідних і зняття вихідних взаємодій:
а)
що відповідає граничним
умовам першого роду;
б)
що відповідає граничним
умовам другого роду ,
в)
що відповідає граничним
умовам третього роду.
Комплексний коефіціент
підсилення зв’язку W (jω) визначається як  з
урахуванням рівняння. При цьому постійна А скорочується і для трьох
переглянутих прикладів дістаємо:
з
урахуванням рівняння. При цьому постійна А скорочується і для трьох
переглянутих прикладів дістаємо:
у випадку (а)
 ;
;
у випадку (б)
 ,
,
або
 ;
;
у випадку (в)
 ,
,
або
 .
.
В усіх випадках комплексний
коефіцієнт підсилення виражається ірраціональною функцією jω. Прикладами
ірраціональних зв’язків можуть служити різні дифузійні і теплові об’єкти (мал.
а ) і об’єкт радіаційного підігріву; об’єкти індукційного підігріву; телефонний
кабель (мал., б ) з розподіленими опором і ємністю.
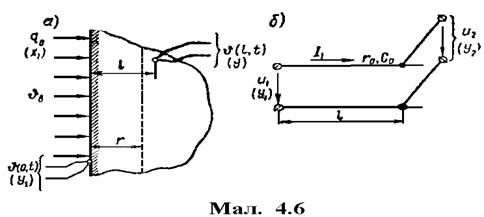
Приклад. 4.3. Нехай тіло
невизначеної товщини (див. мал. ) нагрівається потоком випромінювання при
відсутності тепловіддачі з поверхні  Тоді рівняння набуває виду
Тоді рівняння набуває виду
Ці рівняння співпадають при

Виходячи, для радіаційної
печі

де α - коефіцієнт
теплообміну між поверхнею речовини і повітрям, і температура повітря  приймається
рівним нулю, то комплексний коефіцієнт підсилення виражається рівнянням
приймається
рівним нулю, то комплексний коефіцієнт підсилення виражається рівнянням
 .
.
якщо в якості вхідної
величини розглядати температуру поверхні тіла  , а вихідною - температуру на
глибині l , тобто
, а вихідною - температуру на
глибині l , тобто
 , то
, то
 .
.
Вказавши , вирази
можливо записати слідуючим чином
, вирази
можливо записати слідуючим чином
 ,
,
 ,
,
 ,
,
Передаточними функціями,
відповідно виразам при
 і
і  , будуть:
, будуть:
 ,
,
 ,
,
 .
.
Вирази відрізняються від
передаточних функцій інтегруючого і інерційного зв’язку лише квадратним
коренем. По аналогії з інтегруючими і інерційними, такі зв’язки можна назвати
напівінтегруючими і напівінерційними. Третій вираз не тільки ірраціональний, а
також і трансцендентний.
Розглянемо характеристики
ірраціональних зв’язків, описаних
СПИСОК ВИКОРИСТАНОЇ
ЛІТЕРАТУРА
1. Теорія
автоматичного керування М.Г.Попович О.В.Ковальчук Київ "Либідь" 2007
2. Андрющенко
В.А.Теория систем автоматического управления.2010.
. Анхимюк
В.Л.Теория автоматического управления.2010.
. Бесекерский
В.А.Теория систем автоматического управления.2013.
. Воронов
А.А.Основы теории автоматического регулирования и управления.2007.
. Келим
Ю.М.Типовые элементы систем автоматического управления.2012.
. Ким
Д.П.Теория автоматического управления.Т1.Линейные системы.2013
. Михайлов
В.С.Теория управления.2008
. Олссон
Г.Цифровые системы автоматизации и управления.2011.
. Тюкин
В.Н.Теория управления.2010.Ч1.
. Цыпкин
Я.З.Основы теории автоматических систем.2007.
. Юревич
Е.И.Теория автоматического управления.2005.