)+1500·0)=-(-62,5-20)=82,5 (н·м).
Определение
момента Мдин (φ)
для преодоления сил динамического сопротивления
Силы динамического
сопротивления, действующие в механизме, также как и силы статического
сопротивления могут быть приведены к кривошипу. Динамический момент найдём по
формуле:
Мдин= ω1²/2·dIпр/dφ+ε1·Iпр , (5)
где ω1 – угловая скорость кривошипа;
ε1 – угловое ускорение кривошипа;
φ – угол поворота кривошипа;
Iпр – приведённый момент инерции механизма.
Т.к. угловая скорость
кривошипа ω1 постоянная, то ε1=0. Значит формулу (5) можно записать в виде:
Мдин= ω1²/2·dIпр/dφ , (6)
где величина ω1²/2=const, а ω1=2π·n1/60=2·3,14·140/60=14,65 рад,
следовательно, ω1²/2=107,3113 рад².
Параметр Iпр определяется формулой
Iпр=∑(mi·(Vi/ω1)²+ Ii·(ωi/ω1)²) , (7)
где mi – масса i-ого звена, mi= Gi/g;
Ii – момент инерции i-ого звена относительно полюса;
Vi/ω1 и ωi/ω1 – кинематические передаточные функции;
n – количество весомых звеньев.
Рассчитаем значения
момента инерции (Iпр) для каждого из положений механизма. Для
нашего случая формулу (7) можно записать в следующем виде:
Iпр=(m2·(VB2/ω1)²+ (m2·(l2)²/12)·(ω2/ω1)²)+(
(m5·(l5)²/3)
· (ω5/ω1)²)+m4· ·(VB4/ω1)²+ m3·(VB2/ω1)² , (8)
где m2=G2/g=2500/9,8=255,1 (кг) – масса шатуна;
m3=G3/g=800/9,8=81,6 (кг) – масса ползуна;
m4=G4/g=1000/9,8=102 (кг) – масса пуансона;
m5=G5/g=1500/9,8=153,1 (кг) – масса кулисы;
I2=m2·(l2)²/12=255,1·(0,6)²/12=7,653
(кг·м²) – момент инерции шатуна;
I5=m5·(l5)²/3=153,1·(0,21)²/3=2,251 (кг·м²) –
момент инерции кулисы.
Подставив найденные значения
m2, m3, m4, I2, I5 (эти величины постоянные) в формулу (8), получим:
Iпр=255,1·(VB2/ω1)²+7,653·(ω2/ω1)²+2,251·(ω5/ω1)²+102·(VB4/ω1)²+ 81,6·
·(VB2/ω1)² , (9)
Iпр=336,7·(VB2/ω1)²+7,653·(ω2/ω1)²+2,251·(ω5/ω1)²+102·(VB4/ω1)² , (9)
Проведём расчёт Iпр для всех выбранных положений механизма по формуле
(9):
Iпр1=336,7·(0,025)²+7,653·(0,083)²+2,251·(0)²+102·(0)²=0,21+0,053=0,263
(кг·м²);
Iпр2=336,7·(0,032)²+7,653·(0,082)²+2,251·(0,115)²+102·(0,025)²=0,345+0,052+0,030+
+0,064=0,491 (кг·м²);
Iпр3=336,7·(0,046)²+7,653·(0,05)²+2,251·(0,22)²+102·(0,044)²=0,712+0,019+0,109+
+0,197=1,037 (кг·м²);
Iпр4=336,7·(0,05)²+7,653·(0)²+2,251·(0,238)²+102·(0,05)²=0,842+0+0,128+0,255=1,225
(кг·м²);
Iпр5=336,7·(0,043)²+7,653·(0,051)²+2,251·(0,193)²+102·(0,042)²=0,623+0,02+0,084+
+0,180=0,907 (кг·м²);
Iпр6=336,7·(0,031)²+7,653·(0,079)²+2,251·(0,107)²+102·(0,024)²=0,324+0,048+0,026+
+0,059=0,457 (кг·м²);
Iпр7=336,7·(0,025)²+7,653·(0,083)²+2,251·(0)²+102·(0)²=0,210+0,053+0+0=0,263
(кг·м²);
Iпр8=336,7·(0,037)²+7,653·(0,068)²+2,251·(0,129)²+102·(0,028)²=0,461+0,035+0,037+
+0,08=0,613 (кг·м²);
Iпр9=336,7·(0,045)²+7,653·(0,035)²+2,251·(0,197)²+102·(0,042)²=0,682+0,01+0,087+
+0,18=0,959 (кг·м²);
Iпр10=336,7·(0,05)²+7,653·(0)²+2,251·(0,238)²+102·(0,05)²=0,842+0+0,126+0,255=1,223
(кг·м²);
Iпр11=336,7·(0,046)²+7,653·(0,035)²+2,251·(0,21)²+102·(0,043)²=0,712+0,01+0,099+
+0,189=1,01 (кг·м²);
Iпр12=336,7·(0,036)²+7,653·(0,062)²+2,251·(0,133)²+102·(0,027)²=0,436+0,029+0,04+
+0,074=0,579 (кг·м²);
Значение первой
производной приведённого момента инерции по углу поворота кривошипа определим,
используя аппроксимацию первой производной конечными разностями:
I´прi=(dIпрi/dφi)=(Iпр(i+1) -Iпрi)/(φ(i+1) -φi) , (10)
где Iпр(i+1), Iпрi – значения
приведённого момента инерции для i+1 и i-го положений кривошипа,
соответственно;
φ(i+1) и φi – значения угла поворота кривошипа для i+1 и i-го положений кривошипа, соответственно.
Для вычисления первой
производной I´пр(φ) по формуле (10) необходимо
дополнительно разбить график Iпр(φ) на
интервалы, т.к. стандартных двенадцати положений явно недостаточно.
В положениях 8, 15, 22
функция Iпр(φ) имеет экстремумы, поэтому первая
производная I´пр(φ)
в этих точках равна
нулю. Проведём расчёт I´пр(φ) по формуле (10):
I´пр1= =
= =0,371 (кг·м²/рад);
=0,371 (кг·м²/рад);
I´пр2= =
= =0,5 (кг·м²/рад);
=0,5 (кг·м²/рад);
I´пр3= =
= =1,104 (кг·м²/рад);
=1,104 (кг·м²/рад);
I´пр4= =
= =0,982 (кг·м²/рад);
=0,982 (кг·м²/рад);
I´пр5= =
= =0,546 (кг·м²/рад);
=0,546 (кг·м²/рад);
I´пр6= =
= =0,306 (кг·м²/рад);
=0,306 (кг·м²/рад);
I´пр7= =
= =0,076 (кг·м²/рад);
=0,076 (кг·м²/рад);
I´пр8= =
= =-0,076 (кг·м²/рад);
=-0,076 (кг·м²/рад);
I´пр9= =
= =-0,458 (кг·м²/рад);
=-0,458 (кг·м²/рад);
I´пр10= =
= =-0,756 (кг·м²/рад);
=-0,756 (кг·м²/рад);
I´пр11= =
= =-0,867 (кг·м²/рад);
=-0,867 (кг·м²/рад);
I´пр12= =
= =-0,852 (кг·м²/рад);
=-0,852 (кг·м²/рад);
I´пр13= =
= =-0,562 (кг·м²/рад);
=-0,562 (кг·м²/рад);
I´пр14= =
= =-0,31 (кг·м²/рад);
=-0,31 (кг·м²/рад);
I´пр15= =
= =-0,054 (кг·м²/рад);
=-0,054 (кг·м²/рад);
I´пр16= =
= =0,523 (кг·м²/рад);
=0,523 (кг·м²/рад);
I´пр17= =
= =0,814 (кг·м²/рад);
=0,814 (кг·м²/рад);
I´пр18= =
= =0,676 (кг·м²/рад);
=0,676 (кг·м²/рад);
I´пр19= =
= =0,646 (кг·м²/рад);
=0,646 (кг·м²/рад);
I´пр20= =
= =0,615 (кг·м²/рад);
=0,615 (кг·м²/рад);
I´пр21= =
= =0,535 (кг·м²/рад);
=0,535 (кг·м²/рад);
I´пр22= =
= =-0,008 (кг·м²/рад);
=-0,008 (кг·м²/рад);
I´пр23= =
= =-0,241 (кг·м²/рад);
=-0,241 (кг·м²/рад);
I´пр24= =
= =-0,573 (кг·м²/рад);
=-0,573 (кг·м²/рад);
I´пр25= =
= =-0,802 (кг·м²/рад);
=-0,802 (кг·м²/рад);
I´пр26= =
= =-0,844 (кг·м²/рад);
=-0,844 (кг·м²/рад);
I´пр27= =
= =-0,646 (кг·м²/рад);
=-0,646 (кг·м²/рад);
По результатам вычислений
I´пр(φ) строим график зависимости первой
производной Iпр от угла поворота кривошипа. Значения I´пр(φ) в выбранных положениях (в таблицу
занесены только основные положения) приведены в Таблице 4. Экстремумы функции в
точках 8, 22 смещены в положения 4, 10, соответственно.
По формуле 6 рассчитаем
момент движущих сил для преодоления сил динамического сопротивления во всех
выбранных положениях механизма:
Мдин=107,3113·dIпр/dφ ;
Мдин1=107,3113·0=0 (н·м);
Мдин2=107,3113·0,5=53,656
(н·м);
Мдин3=107,3113·0,982=105,38 (н·м);
Мдин4=107,3113·(-0,08)=-8,585
(н·м);
Мдин5=107,3113·(-0,76)=-81,557
(н·м);
Мдин6=107,3113·(-0,85)=-91,215
(н·м);
Мдин7=107,3113·(-0,05)=-5,366
(н·м);
Мдин8=107,3113·0,814=87,351
(н·м);
Мдин9=107,3113·0,646=69,323
(н·м);
Мдин10=107,3113·(-0,01)=-1,073
(н·м);
Мдин11=107,3113·(-0,57)=-61,167
(н·м);
Мдин12=107,3113·(-0,84)=-90,142
(н·м).
Полученные значения Мдин приведены в Таблице 4.
График зависимости Мдин(φ)
показан на Рисунке 13.
Рисунок 12. Зависимости
приведённого момента инерции Iпр и его
первой производной I´пр от
угла поворота кривошипа.
Расчёт КПД механизма
Момент движущих сил Мдв,
в соответствии с зависимостью (1), был определён в предположении, что
кинематические пары механизма идеальны.
Влияние сил трения
учитывают с помощью коэффициента полезного действия η.
При последовательном
соединении кинематических пар их общий КПД определяется следующим выражением:
η=η1·η2·……·ηк
, где к-число
кинематических пар.
При параллельном
соединении кинематических пар КПД определяется как среднее арифметическое КПД
отдельных пар, при условии, что поток мощности распределяется равномерно между
кинематическими парами:
η=(η1+η2+…+ηк)/к
, где к-число
кинематических пар.
Суммарный КПД для нашего
механизма (Рисунок 14) равен:
η∑=
[(ηс+ηс)/2]·ηс·ηк·ηпн2·ηпн4·ηк·[(ηс+ηс)/2]=
ηс·ηс·ηк·ηпн2·ηпн4·ηк·ηс=
= η3с·
η2к·ηпн2·ηпн4 , (11)
где ηс=0,98
– КПД подшипника скольжения;
ηк=0,99 – КПД подшипника качения;
ηпн2=0,86 – КПД кинематической пары
«ползун по направляющей»;
ηпн4=0,86 – КПД кинематической пары
«пуансон по направляющей»;
Т.к. сила, определяющая в
направляющих потери на трение, была учтена явным образом при подсчёте
статического момента, то в формулу вычисления КПД она не входит.
η∑=(0,98)3·(0,99)2·0,86·0,86=0,68.
Расчёт движущего
момента М∑(φ)
По формуле (1) мы
определяем момент движущих сил, считая, что кинематические пары идеальны.
Однако силы трения присутствуют всегда, и их обычно учитывают с помощью
коэффициента полезного действия – КПД.
Выражение для суммарного
момента движущих сил М∑ с учётом потерь на трение примет вид:
М∑=k·(Мст+Мдин) , (12)
где k – коэффициент, учитывающий
присутствие сил трения в кинематических парах, равный: k=η , если (Мдв<0) –
соответствуетработе привода в режиме генератора (когда привод играет роль
тормоза);
k=1/η , если (Мдв>0) – соответствует
работе привода в режиме двигателя.
Используя данные Таблицы
4, рассчитаем суммарный момент движущих сил М∑ для всех
выбранных положений механизма:
М∑1=Мдв1/η=82,5/0,68=121,32
(н·м);
М∑2=Мдв2/η=115,2/0,68=169,41
(н·м);
М∑3=Мдв3/η=138,8/0,68=204,12
(н·м);
М∑4=Мдв4/η=78,91/0,68=116,04
(н·м);
М∑5=Мдв5/η=123,6/0,68=181,76
(н·м);
М∑6=Мдв6·η=-151·0,68=-102,68
(н·м);
М∑7=Мдв7·η=-87,9·0,68=-59,77
(н·м);
М∑8=Мдв8·η=-1,85·0,68=-1,26
(н·м);
М∑9=Мдв9/η=12,92/0,68=19
(н·м);
М∑10=Мдв10·η=-1,07·0,68=-0,73
(н·м);
М∑11=Мдв11·η=-13,3·0,68=-9,04
(н·м);
М∑12=Мдв12·η=-14,6·0,68=-9,93
(н·м);
М∑13=Мдв13/η=82,5/0,68=121,32
(н·м);
Полученные данные
приведены в Таблице 4.
Зависимость М∑(φ)
представлена на Рисунке 13.
Таблица 4.
Результаты расчёта
момента движущих сил и его составляющих.
|
№
положения
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
1
|
|
φ,
рад
|
0
|
π/6
|
π/3
|
π/2
|
2π/3
|
5π/6
|
π
|
7π/6
|
4π/3
|
3π/2
|
5π/3
|
11π/6
|
2π
|
|
Мст,
н•м
|
82,5
|
61,58
|
33,41
|
87,5
|
205,2
|
-59,6
|
-82,5
|
-89,2
|
-56,4
|
0
|
47,9
|
75,48
|
82,5
|
|
Q
, кН
|
0
|
0
|
0
|
1,75
|
5,54
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
Iпр,
кг•м²
|
0,263
|
0,491
|
1,037
|
1,225
|
0,907
|
0,457
|
0,263
|
0,613
|
0,959
|
1,223
|
1,01
|
0,579
|
0,263
|
|
I´пр,
кг•м²/рад
|
0
|
0,5
|
0,982
|
-0,08
|
-0,76
|
-0,85
|
-0,05
|
0,814
|
0,646
|
-0,01
|
-0,57
|
-0,84
|
0
|
|
Мдин,
н•м
|
0
|
53,66
|
105,4
|
-8,59
|
-81,6
|
-91,2
|
-5,37
|
87,35
|
69,32
|
-1,07
|
-61,2
|
-90,1
|
0
|
|
Мдв,
н•м
|
82,5
|
115,2
|
138,8
|
78,91
|
123,6
|
-151
|
-87,9
|
-1,85
|
12,92
|
-1,07
|
-13,3
|
-14,6
|
82,5
|
|
М∑,
н•м
|
121,3
|
169,4
|
204,1
|
116
|
181,8
|
-103
|
-59,8
|
-1,26
|
19
|
-0,73
|
-9,04
|
-9,93
|
121,3
|
Рисунок 13. Изменение
суммарного момента движущих сил и его составляющих от угла поворота кривошипа.
ВЫБОР РЕДУКТОРА (*)
Для выбора редуктора
необходимо определить передаточное число редуктора, характер нагрузки, число
оборотов быстроходного вала редуктора и расчётный момент Мрасч, который
определяется по формуле:
Мрасч=k1·k2·Мн , (13)
где k1=1 (т.к. nдв≤1500 об/мин) – коэффициент,
который отражает влияние повышенной частоты вращения вала электродвигателя;
k2 – коэффициент, отражающий влияние характера
нагрузки;
Мн – такой
постоянный по величине момент, который совершает за один технологический цикл
ту же работу, что и реальный суммарный момент М∑(φ).
Формула для определения номинального момента имеет вид:
Мн= ·∫ М∑(φ)dφ , (14)
·∫ М∑(φ)dφ , (14)
Для определения Мн
подсчитаем площадь под графиком суммарного момента М∑(φ)
(Рисунок 13), которая равна S=498,9
(н·м/с) и затем найдём номинальный момент Мн по формуле (14):
Мн=·498,9=79,4 (н·м).
По графику суммарного
момента М∑(φ) (Рисунок 13) определим характер
нагрузки – сильные толчки. Следовательно, коэффициент k2=2,8.
По формуле (13) найдём Мрасч:
Мрасч=1·2,8·79,4=222,32 (н·м).
Найдём передаточное
отношение зубчатой передачи:
i=nдв/n1=480/140=3,4 ,
где nдв – частота вращения вала двигателя;
n1 – число оборотов кривошипа.
По расчётному моменту Мрасч
и пердаточному числу i из
каталога [3] выбираем мотор-редуктор цилиндрический одноступенчатый МЦ-100. Допускаемый
крутящий момент T на выходном
валу равен 230 н·м.
Для выбранного редуктора
найдём передаточное число iф=3,57, и
определим погрешность по передаточному числу δi и по допускаемому крутящему моменту δТ:
δi=(iф-i)/i=[(3,57-3,4)/3,4]·100%=5%;
δТ=(T-Мрасч)/Мрасч=[(230-222,32)/222,32]·100%=3,45%.
Параметры редуктора
приведены в Таблице 5.
Характеристики подшипника
качения приведены в Таблице 6.
Схема подшипника качения
показана на Рисунке 14.
Таблица 5. Значение
эксплуатационных и конструктивных параметров цилиндрического одноступенчатого
мотор-редуктора МЦ-100 [3]
|
Обозначение
|
Единица
измерения
|
Наименование параметра
|
Значение
параметра
|
|
H1
|
мм
|
высота редуктора
|
426
|
|
B1
|
мм
|
ширина редуктора
|
305
|
|
L
|
мм
|
длина редуктора
|
675
|
|
aw
|
мм
|
межосевое расстояние
|
100
|
|
m
|
мм
|
нормальный модуль зубчатого
зацепления
|
1,5
|
|
tk
|
мм
|
ширина венца зубчатого
колеса
|
25
|
|
z1
|
-
|
число зубьев шестерни
|
28
|
|
z2
|
-
|
число зубьев колеса
|
100
|
|
iф
|
-
|
фактическое передаточное
число редуктора
|
3,57
|
|
β
|
град.
|
угол наклона линии зуба
|
16˚15΄37˝
|
|
dТ
|
мм
|
посадочный диаметр
хвостовой части тихоходного вала
|
40
|
|
dБ
|
мм
|
посадочный диаметр
хвостовой части быстроходного вала
|
-
|
|
-
|
-
|
номер подшипника на
тихоходном валу редуктора
|
7308
|
|
-
|
-
|
материал и термообработка
колеса и шестерни редуктора
|
|
-
|
-
|
материал и термообработка
тихоходного вала редуктора
|
Ст. 40Х, улучшение
|
Таблица 6. Характеристики
подшипника качения № 7308
|
Обозначение
|
Единица
измерения
|
Наименование параметра
|
Значение
параметра
|
|
D
|
мм
|
наружный диаметр подшипника
|
90
|
|
d
|
мм
|
внутренний диаметр
подшипника
|
40
|
|
T
|
мм
|
габаритная ширина
подшипника
|
25,25
|
|
c
|
мм
|
ширина наружного кольца
подшипника
|
20
|
|
C
|
кН
|
динамическая
грузоподъёмность
|
66
|
|
X
|
-
|
коэффициент радиальной
нагрузки
|
0,4
|
|
Y
|
-
|
коэффициент осевой нагрузки
|
2,16
|
|
e
|
-
|
величина, характеризующая
критическое отношение радиальной и осевой нагрузок
|
0,28
|
|
α
|
град.
|
Угол между осями подшипника
и телом качения
|
12˚
|
Характеристики подшипника
качения № 7308 взяты из справочника [4].
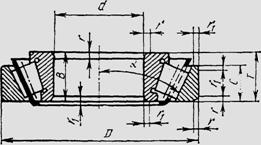
Рисунок 14. Схема
конического подшипника качения.
Формула для определения
диаметра делительной окружности колеса d1 имеет вид:
d1= z2 , (15)
z2 , (15)
где m – нормальный модуль зубчатого зацепления;
β – угол наклона линии зуба;
z2 – число зубьев колеса;
d1=1,5·100/cos16˚15΄37˝=150/0,96=156,25 (мм);
Окружную силу определим
по формуле:
Ft=2·М∑max/d1, (16)
где М∑max – максимальный момент на тихоходном
валу;
dк=d1 – диаметр начальной окружности;
Ft=2·216/156,25·10-3=432/156,25·10-3=2764,8
Н .
Осевую составляющую Fa определим по формуле:
Fa=Ft·tgβ , (17)
Fa=2764,8·tg16˚15΄37˝=805,87 Н.
Радиальную силу определим
по формуле:
Fr=(Ft·tgαw)/cosβ , (18)
где αw – угол зацепления косозубой передачи
в нормальном сечении (αw≈20˚);
Fr= =1048,032
Н .
=1048,032
Н .
РАСЧЁТ ТИХОХОДНОГО
ВАЛА НА ПРОЧНОСТЬ
Расчёт состоит из
нескольких этапов:
1. формирование расчётной
схемы вала;
2. расчёт вала на
статическую прочность;
3. проектировочный расчёт
шпоночного или шлицевого соединения;
4. расчёт вала на
выносливость.
Валы в редукторах
выполняют ступенчатыми, т.к. это обеспечивает удобный монтаж, надёжную фиксацию
подшипников и зубчатых колёс.
Расчёт проводится для
тихоходного вала, как наиболее нагруженного.
Формирование расчётной
схемы вала
Будем считать, что сила,
действующая со стороны ролика, на беговую дорожку внутреннего кольца
подшипника, приложена в геометрическом центре конического ролика.
Будем полагать, что
геометрический центр ролика определяется в осевом направлении размером С/2 и
лежит на окружности диаметром dср= =
= =65
(мм).
=65
(мм).
В качестве прототипа был
взят чертёж тихоходного вала мотор-редуктора МЦ-80 (Лист 38) из каталога [3].
Формирование расчётной
схемы тихоходного вала показано на Рисунке 16.
При установке
радиально-упорных конических подшипников враспор наблюдается смещение опор на
расчётной схеме внутрь относительно тел качения на величину 1.
Определим S – смещение опоры относительно
середины наружного кольца подшипника:
S= =
= =
= ·tg12˚=6,91 (мм).
·tg12˚=6,91 (мм).
Определим L=2T+tk+a+b , - расстояние между внешними торцами подшипников,
где T – габаритная ширина подшипника;
tk – ширина венца зубчатого колеса;
a – ширина упорного буртика;
b – размер ступенчатой части колеса.
Формирование расчётной
схемы вала.
Размеры a и b получены масштабированием сборочного чертежа мотор-редуктора
МЦ-80 – [3] и исходя из рекомендаций по выбору данных размеров.
a=6 , b=8
Тогда получим:
L=2·25,25+25+6+8=89,5 (мм).
Определим расчётную длину
вала lрас по формуле:
lрас=L-2·( +1)=89,5-2·(
+1)=89,5-2·( )=67,5 (мм);
)=67,5 (мм);
где с – ширина наружного
кольца подшипника.
Найдём длину lk2, которая определяет положение
срединной плоскости колеса:
lk2=(Т+tk/2)-(+1)=(25,25+25/2)-()=26,75
(мм).
Зная lk2 , определим размер lk1:
lk1=lрас-lk2=67,5-26,75=40,75 (мм).
Расчёт вала на
статическую прочность
Заменим шарнирные опоры
силами реакции, а силы, действующие в зубчатом зацеплении, приведём к оси вала:
Ma=Fa·dw/2=Ft·tgβ·dw/2=(2·М∑max/dw)·tgβ·dw/2=М∑max·tgβ=216·0,292=62,96(Н·м);
Mt=Ft·dw/2=(2·М∑max/dw)·dw/2=М∑max=216 (Н·м);
Разложим реакции опор Ra и Rc на составляющие по осям, и найдём
их.
1. Составляющие по оси X:
∑Mcy=-xa·lрас+Ft·lk2=0;
xa=( Ft·lk2)/lрас=(2764,8·26,75·10-3)/67,5·10-3=1095,68
Н;
∑May= xc·lрас-Ft·lk1=0;
xc=( Ft·lk1)/lрас=(2764,8·40,75·10-3)/67,5·10-3=1669,12
Н;
2. Составляющие по оси Y:
∑Mcx=-ya·lрас+Ma+Fr·lk2=0;
ya=(Ma+Fr·lk2)/lрас=(62,96+1048,032·26,75·10-3)/67,5·10-3=1348,07
Н;
∑Max=yc·lрас+Ma-Fr·lk1=0;
yc=(-Ma+Fr·lk1)/lрас=(-62,96+1048,032·40,75·10-3)/67,5·10-3=-300,04
Н;
3. Составляющие по оси Z:
∑Fz=Fa-zc=0; zc=Fa=805,87 Н.
Допущения:
1) пренебрежём влиянием
на прочность касательных напряжений от поперечной силы.
2) не учитываем
циклический характер нагружения вала, а также влияние на прочность
конструктивных (концентрация напряжения) и технологических факторов.
Расчётная схема вала
показана на Рисунке 17.
По эпюрам внутренних
силовых факторов видно, что опасным сечением является сечение B (под срединной плоскостью колеса
(слева)).
В точке Е реализуется
плоское упрощенное напряжённое состояние. Для определения эквивалентного
напряжения в точке Е воспользуемся третьей теорией прочности.
Запишем условие
прочности:
σЕэкв=[σ], для стали 40Х [σ]=80 МПа; (*)
σІІІэкв=σ1-σ3=((σ/2)+√(σ/2)2+τ2)-((σ/2)-√(σ/2)2+τ2)=√σ2+4τ2 .
Для нашего случая
воспользуемся частной формулой для определения σэкв:
σЕэкв= ·√M2изг+M2∑max .
·√M2изг+M2∑max .
Подставим данное
выражение для σЕэкв в условие прочности и
выразим параметр d:
·√M2изг+M2∑max ≤[σ];
d3≥(32·√M2изг+M2∑max)/[σ]·π; d≥ √(32·√M2изг+M2∑max)/[σ]·π ;
[d]= =
= =3,07·10-2 (м) = 30,7 (мм).
=3,07·10-2 (м) = 30,7 (мм).
По ГОСТ 6636-69
«Нормальные линейные размеры» выбираем размер [d]ГОСТ=31 мм.
Тогда
d=max(dкат ;[d]ГОСТ)=max(0,044 ; 0,031)=0,044 (м) =44 (мм).
Проектировочный расчёт
шпоночного соединения
Таблица 7. Размеры шпонки
по ГОСТ 23360-78.
|
Диаметр вала d, мм
|
Ширина шпонки b, мм
|
Высота шпонки h, мм
|
Глубина паза вала t1,
мм
|
|
44
|
12
|
8
|
5,0
|
Расчёт шпоночного
соединения проводим по напряжениям смятия σсм:
σсм ≤ [σсм] . (19)
Для стали 45, из которой
чаще всего изготавливают шпонки [σсм]=180 МПа, но так как характер нагрузки – сильные
толчки, то это напряжение необходимо понизить на 35%. В результате получим [σсм]=117 МПа.
σсм = Nсм/Sсм ,
где Nсм – сила смятия;
Sсм – площадь смятия.
Sсм=(h-t1)·lраб , lраб=l-b , Sсм=(h-t1)·(l-b).
Nсм определим из условия равновесия:
∑Mz=M∑max-Nсм·d/2=0 , Nсм=2· M∑max/d .
Подставим полученные
выражения для Sсм и Nсм в
условие прочности (19):
2· M∑max/d·(h-t1)·(l-b) ≤ [σсм] . (20)
Из полученного равенства
(20) выразим l:
l ≥ (2· M∑max/[σсм]·d·(h-t1))+b;
[l]= =0,04
(м) = 40 (мм).
=0,04
(м) = 40 (мм).
Т.к. длина шпонки [l]=40 (мм) получилась больше, чем
длина ступицы Lст=33 (мм) (Lст=tk+b=25+8=33 (мм)), то одна шпонка не удовлетворяет условию
прочности. Исходя из этого, необходимо поставить две диаметрально расположенные
шпонки. В этом случае длина шпонки будет определяться неравенством:
l ≥ (M∑max/[σсм]·d·(h-t1))+b;
[l]= =0,026
(м) = 26 (мм).
=0,026
(м) = 26 (мм).
Согласно ГОСТ 23360-78
длину шпонки выбираем l=28 (мм).
Lст-l =33-28=5 (мм), что удовлетворяет
условию выбора шпонок: Lст-l =5…15 (мм).
По результатам
проектировочного расчёта шпоночного соединения назначим две диаметрально
расположенные шпонки 12×8×28 по ГОСТ 23360-78.
Расчёт вала на
выносливость
Все расчётные зависимости
и значения коэффициентов взяты из учебника [5].
Проверочный расчёт вала
на выносливость выполним с учётом формы циклов нормального и касательного
напряжений, конструктивных и технологических факторов. Проверочный расчёт
заключается в определении расчётного фактического коэффициента запаса прочности
и сравнении его со значением нормативного коэффициента.
n ≥ [n] ,
где [n]=2,5 – значение нормативного коэффициента запаса
прочности.
Значение n найдём по формуле:
n= , (21)
, (21)
где nσ – фактический коэффициент запаса
прочности по нормальным напряжениям;
nτ – фактический коэффициент запаса прочности по
касательным напряжениям.
Величину nσ определим по формуле:
nσ=σ-1/[(kσ·β·σa/εσ)+σm·ψσ] , (22)
где σ-1=410 МПа для стали 40Х
(термообработка улучшение) – предел выносливости стали при симметричном изгибе;
kσ=1,77 – (для канавки, полученной
пальцевой фрезой) – эффективный коэффициент концентрации нормальных напряжений
при изгибе;
β=1,2 – коэффициент, отражающий влияние качества
обработки поверхности вала (вид обработки – точение);
εσ=0,81 – коэффициент масштабного
фактора (соответствует диаметру вала равному 44 мм);
ψσ=0,1 – коэффициент, отражающий
влияние асимметрии цикла на усталостную прочность;
σa – амплитуда цикла нормальных
напряжений при изгибе;
σm – среднее напряжение цикла при
изгибе.
При определении
параметров цикла (σm и σa) будем использовать следующие
допущения:
1) максимальные и
минимальные напряжения реализуются в одной и той же опасной точке, положение
которой было определено ранее (пункт 7.2);
2) будем считать, что
изгибающий момент в сечении изменяется пропорционально крутящему моменту.
Значения σa вычисляется по формуле:
σa=(σmax-σmin)/2 .
Значения σm вычисляется по формуле:
σm=(σmax+σmin)/2 .
Найдём величину σmax по формуле:
σmax =Mmaxизг / Wx ,
где Mmaxизг=70,79 Н·м;
Wx=0,1·d3-b·t1·(d-t1)2/d – момент сопротивления сечения вала с двумя шпоночными
канавками.
Wx=0,1·(44·10-3)3 -
 =6,44·10-6 (м3);
=6,44·10-6 (м3);
σmax = =11·106 (Па).
=11·106 (Па).
Из графика зависимости
нормальных напряжений от угла поворота вала (Рисунок 21) видно, что минимальные
нормальные напряжения σmin действуют, когда вал находится в 9 положении.

Схема к определению
нормальных напряжений и график зависимости нормальных напряжений от угла
поворота вала.
Величину σmin вычислим по формуле:
|σmin|=|M∑(9)/M∑max|·σmax·|y(9)/ymax|= ·11·106·sin90˚=1,012·106 (Па).
·11·106·sin90˚=1,012·106 (Па).
В результате расчётов
получим, что σmax= σ3=11 МПа и σmin= σ9=-1,012 МПа.
σа=(σmax -σmin)/2= =6,006 МПа;
=6,006 МПа;
σm=(σmax +σmin)/2= =4,994 МПа.
=4,994 МПа.
Определим значение
коэффициента запаса прочности по нормальным напряжениям nσ по формуле (22):
nσ= =20,53.
=20,53.
Значение nτ определяется по формуле:
nτ= τ-1/[(kτ·β·τa/ετ)+τm·ψτ] , (23)
где τ-1=240 МПа для стали 40Х – предел
выносливости стали при симметричном кручении;
kτ=2,22 – эффективный коэффициент
концентрации напряжений при кручении;
β=1,2 – коэффициент, отражающий
влияние качества обработки поверхности вала;
ετ=0,75 – коэффициент масштабного
фактора;
ψτ=0,05 – коэффициент, отражающий
влияние асимметрии цикла на усталостную прочность вала;
τa – амплитуда цикла касательных
напряжений при кручении;
τm – среднее напряжение цикла при
кручении.
Закон распределения
касательных напряжений τ(φ) совпадает с законом изменения
суммарного момента M∑(φ).
Вычислим значение τmax по формуле:
τmax =M∑max / Wx ,
где M∑max=216 Н·м;
Wx=0,2·d3-b·t1·(d-t1)2/d=0,2·(44·10-3)3 -
 =
=
=14,96·10-6 (м3);
τmax = =14,44·106 (Па).
=14,44·106 (Па).
Аналогично вычислим τmin:
τmin=M∑min / Wx= =
-7,17·106 (Па).
=
-7,17·106 (Па).
Зная τmax и τmin, определим значения τa и τm:
τa=(τmax -τmin)/2= =10,81·106
(Па);
=10,81·106
(Па);
τm=(τmax +τmin)/2= =3,64·106
(Па).
=3,64·106
(Па).

График зависимости
касательных напряжений от угла поворота вала.
Вычислим коэффициент
запаса прочности nτ по формуле (23):
nτ= =6,221.
=6,221.
Найдём значение
расчётного коэффициента запаса прочности по формуле (21):
n= =5,95.
=5,95.
Расчётное значение
фактического коэффициента запаса прочности получилось больше значения
нормативного коэффициента запаса прочности: n ≥ [n], 5,95 > 2,5 - это удовлетворяет расчёту вала на
выносливость.
ПРОВЕРОЧНЫЙ РАСЧЁТ
ЗУБЧАТОЙ ПАРЫ НА ПРОЧНОСТЬ
Все используемые в этом
разделе формулы и расчётные зависимости взяты из конспекта лекций [2].
Определение ресурса
передачи
Ресурс передачи вычислим
по формуле:
Lп=365·Г·Кг·8·C·Кс ,
где Г=7 –
количество лет службы передачи;
Кг= =
= =0,658 – коэффициент годового
использования;
=0,658 – коэффициент годового
использования;
С=2 – количество смен;
8 – продолжительность
рабочей смены в часах;
Кс= =
= =0,875 – коэффициент сменного
использования.
=0,875 – коэффициент сменного
использования.
В результате получим:
Lп=365·7·0,658·2·8·0,875=23536,66 (часов).
Шестерню изготавливают
более твёрдой (твёрдость поверхности зубьев определяется термообработкой), т.к.
число её зубьев меньше, чем у колеса, поэтому она совершает большее число
оборотов и испытывает большее число циклов нагружения.
Следовательно, для
равномерного изнашивания зубъев передачи твёрдость материала шестерни должна
быть выше твёрдости материала колеса на 3…5 единиц по шкале Раквелла.
Характеристики материала
колеса и шестерни приведены в Таблице 8.
Таблица 8. Характеристики
материала зубчатой пары
|
Элемент зубчатого
зацепления
|
марка стали
|
твёрдость HRC
|
технология упрочнения
|
|
колесо
|
40Х
|
50
|
поверхностная закалка
|
|
шестерня
|
40Х
|
54
|
поверхностная закалка
|
Расчёт
поверхности зуба колеса на прочность по контактным напряжениям
Расчёт проводим для
колеса, как наиболее слабого элемента зацепления.
Запишем условие
прочности:
σн ≤ [σн] ,
где σн – действующее напряжение при
циклическом контактном воздействии;
[σн] – допускаемое контактное напряжение.
Значение допускаемого
контактного напряжения [σн]
определяется по формуле:
[σн]=(σно·kHL)/[kH] , (24)
где σно – предел контактной выносливости при базовом числе
циклов нагружения (зависит от материала и термообработки);
σно=17·HRC+200=17·50+200=1050
МПа;
kHL – коэффициент долговечности;
kHL= ,
,
где NHO=4·106 – базовое число
циклов нагружения (взято из конспекта лекций [2]).
NHE=60·c· n1·Lп , - число циклов за весь период
эксплуатации;
где c=1 – число вхождений зуба в
зацепление за один оборот;
NHE=60·140·23536,66=197,71·106
;
kHL= =0,522 , т.к. у нас термообработка
поверхности зубьев - поверхностная закалка, то 1 ≤ kHL ≤ 1,8 и, следовательно, берём kHL=1.
=0,522 , т.к. у нас термообработка
поверхности зубьев - поверхностная закалка, то 1 ≤ kHL ≤ 1,8 и, следовательно, берём kHL=1.
[kH]=1,25 – коэффициент безопасности (выбирается в
зависимости от вида термохимической обработки зубьев: поверхностная закалка).
Вычислим значение [σн] по формуле (24):
[σн]= ·1=840·106 Па.
·1=840·106 Па.
Значение σн вычислим по формуле:
σн= ·
· , (25)
, (25)
где α=340000
Н·м2 – вспомогательный коэффициент, который зависит от материала
колеса и шестерни (сталь – сталь);
kД – коэффициент динамичности, отражающий неравномерность
работы зубчатой передачи (зависит от скорости и точности передачи);
kК – коэффициент концентрации, отражающий неравномерность
распределения напряжений по длине линии контакта;
kД ·kК =1,3 ;
Vк=1,35 – коэффициент, отражающий
повышенную нагрузочную способность косозубых и шевронных колёс;
aw=100·10-3 м – межосевое
расстояние;
iф=3,57 – передаточное число редуктора;
tk=25·10-3 м – ширина венца
зубчатого колеса;
β=16˚15΄37˝ - угол
наклона линии зуба;
M∑max=216 (Н·м) – максимальный суммарный
момент.
Следовательно, σн по формуле (25) получится:
σн= ·
· =831,54·106 Па.
=831,54·106 Па.
Как видно из расчёта,
условие прочности по контактным напряжениям выполняется: 831,54•106
< 840·106. Следовательно, вид термохимической обработки зубьев
выбран верно.
Расчёт зубьев на
прочность при переменном изгибе
Запишем условие
прочности:
σF ≤ [σF] ,
где σF - действующее напряжение при
переменном изгибе;
[σF] – допускаемое напряжение при переменном
изгибе.
Значение [σF] определим по формуле:
[σF]= ·kFL , (26)
·kFL , (26)
где σ-1F = 700 МПа – предел выносливости
материала при симметричном изгибе;
[kF]=1,75 – коэффициент безопасности (зависит от технологии
изготовления зубчатого колеса: заготовка получается штамповкой);
kFL – коэффициент долговечности;
kFL= ,
,
где NFO=4·106 – базовое число
циклов нагружения (взято из конспекта лекций [2]);
NFЕ = NHE =197,71·106 – число
нагружений зуба колеса за весь срок службы передачи;
m=9, т.к. HB>350.
kFL= =0,648.
=0,648.
Т.к. 1 ≤ kFL ≤ 1,63 ,то принимаем kFL = 1.
Вычислим значение [σF] по формуле (26):
[σF]= ·1=400·106
Па.
·1=400·106
Па.
Величину σF определим по формуле:
σF = ·YF , (27)
·YF , (27)
где M∑max=216 (Н·м) – максимальный суммарный
момент;
kД ·kК =1,3 , где kК – коэффициент концентрации, kД – коэффициент динамичности;
m=1,25·10-3 м – нормальный
модуль зубчатого зацепления;
tk=25·10-3 м – ширина венца
зубчатого колеса;
β=16˚15΄37˝ - угол
наклона линии зуба;
zk = z2 = 100 - число зубьев колеса;
Vк=1,35 – коэффициент формы зуба.
YF выбираем по эквивалентному числу
зубьев zv, где zv= =
= =113.
=113.
Соответственно YF = 3,75.
Найдём величину σF по формуле (27):
σF =  =
= =368,05 МПа.
=368,05 МПа.
Получили, что 368,05 МПа
< 400 МПа , а это удовлетворяет условию σF ≤ [σF].
ЗАКЛЮЧЕНИЕ
По заданным
геометрическим, весовым и эксплуатационным параметрам был выполнен синтез
плоского рычажного механизма с одной степенью свободы, в результате которого
были найдены размеры звеньев механизма и межопорные расстояния.
Был произведен
кинематический анализ механизма, основанный на построении ряда последовательных
положений звеньев механизма и соответствующих им планов скоростей, в результате
которого были определены относительные линейные скорости характерных точек и
относительные угловые скорости звеньев.
Далее был проведен
силовой анализ механизма. С целью его упрощения были заменены все звенья и
усилия эквивалентной с точки зрения нагруженности привода динамической моделью.
На основе динамического анализа были определены составляющие момента движущих
сил (Мдв), предназначенные для преодоления сил статистического сопротивления –
статический момент (Мст), и динамического сопротивления – динамический момент
(Мдин). При определении суммарного момента движущих сил (М∑) были учтены
потери на трение (КПД механизма равен 68%).
На основе расчетного
момента Мрасч (Мрасч=k1·k2·Мн=222,32 Н·м, где
величина Мн – есть среднеинтегральное значение функции М∑(φ),
К1 – коэффициент, отражающий повышенную частоту вращения
быстроходного вала редуктора, К2 – коэффициент, отражающий
влияние характера нагрузки) был выбран цилиндрический одноступенчатый
мотор-редуктор МЦ-100 с максимальным крутящим моментом на выходном валу Т=230
Н·м передаточным числом i=3,57 и коническими радиальноупорными
подшипниками №7308 на тихоходном валу, установленными враспор.
Для тихоходного вала
редуктора, который выполнен из стали 40Х (термическая обработка – улучшение), в
результате проектировочного расчёта на статическую прочность был определён
диаметр вала (d=44 мм) в
опасном сечении – под срединной плоскостью зубчатого колеса. По результатам
проектировочного расчёта на прочность при смятии для соединения «вал – колесо»
были выбраны две диаметрально расположенные призматические шпонки 12×8×28
со скруглёнными краями по ГОСТ 23360-78.
Далее был произведён
проверочный расчёт вала на выносливость с учётом конструктивных и
технологических факторов, а также форм циклов нормальных и касательных
напряжений, в результате которого было установлено, что вал удовлетворяет
условию усталостной прочности, т.к. значение фактического коэффициента запаса
прочности n=5,95 больше, чем значение
нормативного коэффициента [n]=2,5.
Проверочный расчёт
зубчатой пары на прочность (в качестве материала колеса и шестерни была выбрана
сталь 40Х с поверхностной закалкой рабочей поверхности зубьев) по контактным и
изгибающим напряжениям подтвердил работоспособность зубчатой пары (действующее
контактное напряжение σн примерно равно допускаемому напряжению [σн], действующее напряжение при переменном изгибе σF примерно равно допускаемому
напряжению [σF]).
Следовательно, можно
сказать, что спроектированный привод пресс-автомата удовлетворяет всем условиям
работоспособности, рассмотренным в расчётно-пояснительной записке.
СПИСОК ИСПОЛЬЗОВАННЫХ
ИСТОЧНИКОВ
1.
Порошин В.Б.,
Худяков А.В. Проектирование привода механического оборудования. : Учебное
пособие по курсовому пректированию – Челябинск: ЮУрГУ, 1997 – 38с.
2.
Порошин В.Б.,
Ребяков Ю.Н., Деккер В.В. Конспект лекций по прикладной механике. – Челябинск:
ЮУрГУ, 2003. – 210 с. (На правах рукописи).
3.
Анфимов М.И. Редукторы.
Конструкции и их расчёт. : Альбом. – М.: Машиностроение, 1993 – 464с.
4.
Перель Л.Я. Подшипники
качения: Расчёт, проектирование и обслуживание опор: Справочник. – М. : Машиностроение,
1983. – 543с.
5.
Иосилевич
Г.Б., Лебедев П.А., Стреляев В.С. Прикладная механика. – М. : Машиностроение,
1985. -576с.
6.
Гузенков П.Г.
Детали машин: учебное пособие для втузов – М. : 1982. – 351с.
ЗАКЛЮЧЕНИЕ
По заданным
геометрическим, весовым и эксплуатационным параметрам был спроектирован привод
пресс-автомата с плавающим ползуном.
Было выполнено следующее:
- произведен
кинематический анализ механизма, основанный на построении ряда последовательных
положений звеньев механизма и соответствующих им планов скоростей, в результате
которого были определены относительные линейные скорости характерных точек и
относительные угловые скорости звеньев.
- проведен силовой анализ
механизма. С целью его упрощения были заменены все звенья и усилия
эквивалентной с точки зрения нагруженности привода динамической моделью. На
основе динамического анализа были определены составляющие момента движущих сил
(Мдв), предназначенные для преодоления сил статистического сопротивления –
статический момент (Мст), и динамического сопротивления – динамический момент
(Мдин). При определении суммарного момента движущих сил (М∑) были учтены
потери на трение (КПД механизма равен 68%).
- На основе расчетного
момента Мрасч (Мрасч=k1·k2·Мн=222,32 Н·м, где
величина Мн – есть среднеинтегральное значение функции М∑(φ),
К1 – коэффициент, отражающий повышенную частоту вращения
быстроходного вала редуктора, К2 – коэффициент, отражающий
влияние характера нагрузки) был выбран цилиндрический одноступенчатый
мотор-редуктор МЦ-100 с максимальным крутящим моментом на выходном валу Т=230
Н·м передаточным числом i=3,57 и коническими радиальноупорными
подшипниками №7308 на тихоходном валу, установленными враспор.
- произведён
проектировочный расчёт тихоходного вала редуктора, который выполнен из стали
40Х (термическая обработка – улучшение), на статическую прочность, в результате
был определён диаметр вала (d=44
мм) в опасном сечении – под срединной плоскостью зубчатого колеса.
- по результатам
проектировочного расчёта на прочность при смятии для соединения «вал – колесо»
были выбраны две диаметрально расположенные призматические
шпонки12×8×28 со скруглёнными краями по ГОСТ 23360-78.
- произведён проверочный
расчёт вала на выносливость с учётом конструктивных и технологических факторов,
а также форм циклов нормальных и касательных напряжений, в результате которого
было установлено, что вал удовлетворяет условию усталостной прочности, т.к.
значение фактического коэффициента запаса прочности n=5,95 больше, чем значение нормативного коэффициента [n]=2,5.
Проверочный расчёт
зубчатой пары на прочность (в качестве материала колеса и шестерни была выбрана
сталь 40Х с поверхностной закалкой рабочей поверхности зубьев) по контактным и
изгибающим напряжениям подтвердил работоспособность зубчатой пары (действующее
контактное напряжение σн примерно равно допускаемому напряжению [σн] (831,54•106 < 840·106), действующее
напряжение при переменном изгибе σF примерно равно допускаемому напряжению [σF] (368,05 МПа < 400 МПа)).
Следовательно, можно
сказать, что спроектированный привод пресс-автомата удовлетворяет всем условиям
работоспособности, рассмотренным в расчётно-пояснительной записке.