Исследование системы стабилизаций частоты вращения двигателя
Курсовая работа
По дисциплине: Теория автоматического
управления
Исследование системы стабилизаций
частоты вращения двигателя
Оглавление
Введение
. Устройство и описание системы стабилизации
. Исследование системы стабилизаций частоты вращения
двигателя без корректирующей цепи
. Исследование системы стабилизаций частоты вращения
двигателя с корректирующей цепью
Заключение
Библиографический список
Введение
Теория автоматического управления (ТАУ) - научная дисциплина, изучающая
процессы автоматического управления объектами разной физической природы. При
этом при помощи математических средств выявляются свойства систем
автоматического управления и разрабатываются рекомендации по их проектированию.
Развитие теории управления началось в период промышленной революции.
Сначала это направление в науке разрабатывалось механиками для решения задач
регулирования, то есть поддержания заданного значения частоты вращения,
температуры, давления в технических устройствах (например, в паровых машинах).
Отсюда происходит название «теория автоматического регулирования».
Основной целью автоматизации является исключение непосредственного
участия человека в управлении производственными процессами и другими
техническими объектами. В настоящее время автоматизация технологических
процессов представляет собой одно из важнейших средств роста эффективности
производства, интенсификации развития народного хозяйства. Таким образом,
задача изучения дисциплины "Теория автоматического управления"
состоит в освоении основных принципов, построения и функционирования
автоматических систем управления на базе современных математических методов и
технических средств. Для изучения теории автоматического управления должен
применяться системный подход, требующий рассмотрения системы в ее целостности,
а не просто учета факторов, влияющих на состояние отдельных элементов.
1. Устройство и описание системы стабилизации
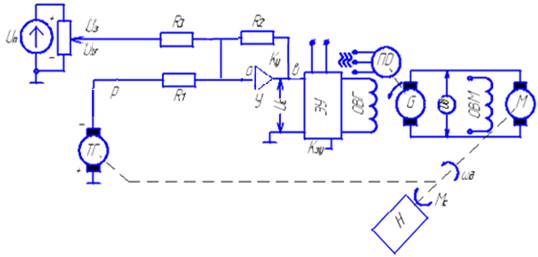
Рисунок 1 - Схема системы стабилизаций
Угловая скорость ω ДПТ (без автоматического регулятора) изменяется с
изменением нагрузки. При увеличении нагрузки ω уменьшается, а при уменьшении
нагрузки ω увеличивается. Количественно эти изменения оцениваются так
называемым возмущающим воздействием  , которое пропорционально моменту
сопротивления
, которое пропорционально моменту
сопротивления  , прикладываемому к валу двигателя.
, прикладываемому к валу двигателя.
 ,
,  ,
,
где  - передаточный коэффициент ДПТ по возмущающему воздействию.
- передаточный коэффициент ДПТ по возмущающему воздействию.
Если по условиям технологии изменение угловой скорости недопустимо, то
нужно использовать замкнутую систему управления - систему стабилизации.
Стабилизация частоты вращения достигается за счёт того, что при изменении
нагрузки автоматически изменяется напряжение  , подаваемое на якорь двигателя. При
увеличении нагрузки напряжение увеличивается, а при уменьшении - уменьшается.
, подаваемое на якорь двигателя. При
увеличении нагрузки напряжение увеличивается, а при уменьшении - уменьшается.
Заданная система является статической, то есть она имеет статическую
ошибку. Это означает, что поставленная задача обеспечения постоянства угловой
скорости при различных нагрузках, решается не полностью. В статических САУ при
изменении нагрузки угловая скорость тоже изменяется и в установившихся режимах
принимает различные значения, зависящие от возмущающего воздействия. Но при
наличии автоматического регулятора угловая скорость будет изменяться в
значительно меньших пределах, чем без регулятора.
При изменении нагрузки на валу двигателя изменяются его обороты. То есть
реальная угловая частота двигателя отличается от заданного значения задатчика.
Тахогенератор измеряет реальную угловую частоту двигателя и подаёт
электрический сигнал на элемент сравнения.
Элементом сравнения является электронный усилитель ЭУ, имеющий два входа.
Операционный усилитель ОУ вычисляет сигнал ошибки  . Сигнал ошибки регулирования
поступает на ЭУ, на котором усиливается по мощности. Усиленный сигнал поступает
на обмотку возбуждения генератора ОВГ (статорная обмотка).
. Сигнал ошибки регулирования
поступает на ЭУ, на котором усиливается по мощности. Усиленный сигнал поступает
на обмотку возбуждения генератора ОВГ (статорная обмотка).
Генератор приводится в движение трёхфазным электродвигателем, который с
постоянной частотой вращает ротор генератора. Генератор выполняет функцию
усилителя мощности. С его роторной обмотки сигнал подаётся на роторную обмотку
двигателя. Статорная обмотка двигателя запитывается от отдельного источника
питания.
Благодаря контуру отрицательной обратной связи формируется сигнал
рассогласования (ошибки регулирования), который после трёхкратного усиления
изменяет обороты двигателя, компенсируя тем самым отрицательное влияние
нагрузки. Ошибка рассогласования стремится к нулю.
2. Исследование системы стабилизаций частоты вращения двигателя без
корректирующей цепи
Составляем функциональную схему системы управления (рисунок 2)
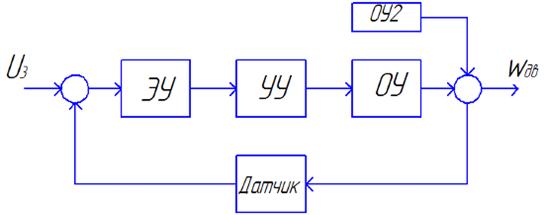
Рисунок 2 - функциональная схема системы управления
Составляем структурную схему замкнутой системы.
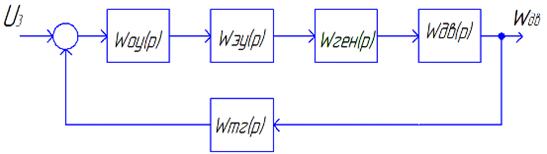
Рисунок 3 - Структурная схема замкнутой системы
Составляем структурную схему разомкнутой системы.

Рисунок 4 - Структурная схема разомкнутой системы
Составляем передаточные функций отдельных звеньев.
Т.к. величина R2 не задана, то передаточную функцию  находят через заданную статическую
ошибку.
находят через заданную статическую
ошибку.
Статическая ошибка  меньше возможного воздействия в (1+Крс ) раз
меньше возможного воздействия в (1+Крс ) раз


 -постоянный момент на валу двигателя.
-постоянный момент на валу двигателя.

 - коэффициент разомкнутой системы
- коэффициент разомкнутой системы
 - коэффициент передачи
разомкнутой системы без учета операционного усилителя.
- коэффициент передачи
разомкнутой системы без учета операционного усилителя.


Составляем передаточную функцию разомкнутой системы.
Передаточная функция разомкнутой системы представляет собой произведение
передаточных функций звеньев прямой ветви на передаточную функцию контура
обратной связи.

Оценка устойчивости системы по критерию Гурвица
Дана передаточная функция разомкнутой системы:

Для получения характеристического уравнения замкнутой системы необходимо
сложить числитель и знаменатель передаточной функции разомкнутой системы.

Составим определитель Гурвица из коэффициентов характеристического
уравнения:
Вывод: по критерию Гурвица данная система неустойчива, так как не
выполняется требование положительности диагональных миноров (Δ2
< 0).
Оценка устойчивости системы по критерию Михайлова
Дана передаточная функция разомкнутой системы:
Для получения характеристического уравнения замкнутой системы необходимо
сложить числитель и знаменатель передаточной функции разомкнутой системы:
От операторной формы перейдём к частотной форме записи
характеристического уравнения, для этого вместо p подставляем jω.

где  - вещественное число, полученное из слагаемых чётных степеней
- вещественное число, полученное из слагаемых чётных степеней
j - мнимая часть, полученная из слагаемых с нечётными степенями
- мнимая часть, полученная из слагаемых с нечётными степенями
Для построения годографа Михайлова необходимо произвести расчёты
вещественной и мнимой частей, изменяя ω от 0 до ∞. Расчёты сведём в
таблицу 1
Таблица 1- Расчет вещественной и мнимой части
|
ω
|
U(w)
|
V(w)
|
|
0
|
44,94
|
0
|
|
15,618
|
7,62
|
0
|
|
17,138
|
0
|
-0,156
|
|
10
|
29,64
|
0,45
|
|
20
|
-16,26
|
-0,488
|
|
+∞
|
-∞
|
-∞
|
По данным таблицы 1 построим годограф Михайлова (рисунок 5)
Рисунок 5- Годограф Михайлова
Вывод: по критерию Михайлова система неустойчива, так как годограф
Михайлова не огибает против часовой стрелки начало координат.
Оценка устойчивости системы по логарифмическим критериям
Суть этого критерия сводится к строению ЛАЧХ и ЛФЧХ и на основе этих
построений делается вывод об устойчивости системы в замкнутом состоянии.
Результирующая ЛАЧХ и ЛФЧХ представляет собой сумму ЛАЧХ и ЛФЧХ отдельных
звеньев системы: 1 апериодического звена первого порядка, 1 апериодического
звена второго порядка и 3 усилительных звеньев.
Wоу=7,30;
Wэу=12; Усилительные
звенья.
Wтг=0,32;
Апериодическое звено первого порядка. 
Апериодическое звено второго порядка. 
У усилительных звеньев горизонтальный участок ЛАЧХ пройдет вдоль оси
абсцисс на уровне 20log(k). Апериодическое звено первого
порядка возьмет начало из точки 20log(k), с одной точкой среза wcр=1/Т под углом 20дБ. Апериодическое
звено второго порядка возьмет начало из точки 20log(k), с
двумя точками среза wcр=1/Т, первый
срез будет под углом 20дБ, а второй под углом 40дБ.
Wоу=20log(7,3)=17,26;
Wэу=20log(12)=21,58;
Wтг=20log(0,32)=-9,89;
Wген=20log(2,34)=7,38;
Wдв=20log(0,67)=-3,47;
Вывод: система неустойчива в замкнутом состоянии, так как при любом
значении φ ЛФЧХ будет положительная.
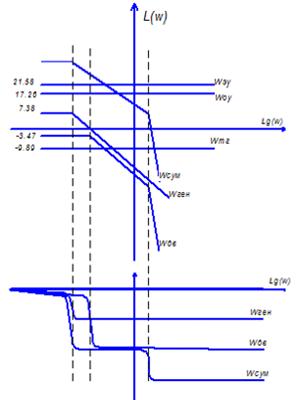
Рисунок-6. ЛАЧХ и ЛФЧХ системы.
Оценка устойчивости системы по критерию Найквиста
Заменяем p на (jw), получаем:

Понижаем степень j,
получаем:

Избавляемся от мнимости в знаменателе, получаем:

Находим корни числителя мнимой и действительной части полинома.
Для построения годографа Найквиста необходимо произвести расчёты
вещественной и мнимой частей.
Расчёты сведём в таблицу 2
Таблица 2- расчет вещественной и мнимой части.
|
w
|
Re
|
jIm
|
|
0
|
43,94
|
0
|
|
2,556
|
0
|
18,046
|
|
7
|
6,751
|
4,434
|
|
15,618
|
4,551
|
0
|
По данным таблицы 2 построим годограф Найквиста (рисунок 7)
Рисунок-7. Годограф Найквиста
Вывод: Данная система не устойчивая, так как ее АФЧХ охватывает точку с
координатами (-1; j0).

Амплитудно-частотная характеристика
Фазовая частотная характеристика
Таблица - 3. Таблица расчетов амплитудно-частотная характеристик и
фазовая частотная характеристика.
|
w
|
A1
|
A2
|
A3
|
A
|
F1
|
F2
|
F3
|
F
|
|
1
|
40,79727
|
0,946773
|
0,999736
|
38,61553
|
-21,8014
|
-18,778
|
-1,31757
|
-41,897
|
|
2
|
34,31138
|
0,826927
|
0,998944
|
28,34301
|
-38,6598
|
-34,2157
|
-2,63375
|
-75,5093
|
|
3
|
28,1297
|
0,700071
|
0,997628
|
19,64609
|
-50,1944
|
-45,5673
|
-3,94715
|
-99,7088
|
|
4
|
23,28815
|
0,59239
|
0,995795
|
13,73766
|
-57,9946
|
-53,6732
|
-5,25641
|
-116,924
|
|
5
|
19,65057
|
0,50702
|
0,993452
|
9,897997
|
-63,4349
|
-59,5345
|
-6,5602
|
-129,53
|
|
6
|
16,9
|
0,440157
|
0,990612
|
7,368822
|
-67,3801
|
-63,8861
|
-7,85719
|
-139,123
|
|
7
|
14,77862
|
0,387364
|
0,987286
|
5,651926
|
-70,3462
|
-67,2094
|
-9,14613
|
-146,702
|
|
8
|
13,1062
|
0,345066
|
0,98349
|
4,447834
|
-72,646
|
-69,8142
|
-10,4258
|
-152,886
|
|
9
|
11,76027
|
0,310631
|
0,97924
|
3,577267
|
-74,4759
|
-71,9027
|
-11,6951
|
-158,074
|
|
10
|
10,65702
|
0,282166
|
0,974555
|
2,930537
|
-75,9638
|
-73,6105
|
-12,9528
|
-162,527
|
|
11
|
9,738031
|
0,258306
|
0,969454
|
2,438555
|
-77,1957
|
-75,0304
|
-14,1979
|
-166,424
|
|
12
|
8,96175
|
0,238052
|
0,963959
|
2,056473
|
-78,2317
|
-76,2284
|
-15,4295
|
-169,89
|
|
13
|
8,297954
|
0,220667
|
0,95809
|
1,754345
|
-79,1145
|
-77,2518
|
-16,6467
|
-173,013
|
|
14
|
7,724241
|
0,205596
|
0,95187
|
1,511639
|
-79,8753
|
-78,1356
|
-17,8486
|
-175,859
|
|
15
|
7,223692
|
0,192414
|
0,945323
|
1,313944
|
-80,5377
|
-78,9063
|
-19,0344
|
-178,478
|
|
16
|
6,78332
|
0,180794
|
0,938471
|
1,150928
|
-81,1193
|
-79,584
|
-20,2036
|
-180,907
|
|
17
|
6,393006
|
0,170478
|
0,931339
|
1,015034
|
-81,6341
|
-80,1844
|
-21,3555
|
-183,174
|
|
18
|
6,044754
|
0,16126
|
0,923949
|
0,900645
|
-82,0928
|
-80,72
|
-22,4896
|
-185,302
|
|
19
|
5,732171
|
0,152977
|
0,916325
|
0,803516
|
-82,5041
|
-81,2005
|
-23,6053
|
-187,31
|
|
20
|
5,450086
|
0,145494
|
0,90849
|
0,720392
|
-82,875
|
-81,6341
|
-24,7024
|
-189,212
|
|
30
|
3,649018
|
0,097571
|
0,82308
|
0,293049
|
-85,2364
|
-34,6057
|
-204,243
|
|
40
|
2,740902
|
0,073331
|
0,735931
|
0,147918
|
-86,4237
|
-85,7946
|
-42,6141
|
-214,832
|
|
50
|
2,194259
|
0,058722
|
0,656179
|
0,084549
|
-87,1376
|
-86,6335
|
-48,9909
|
-222,762
|
|
0
|
43,94
|
1
|
1
|
43,94
|
0
|
0
|
0
|
0
|
По данным таблицы-3 строим АФЧХ (Рисунок 8)
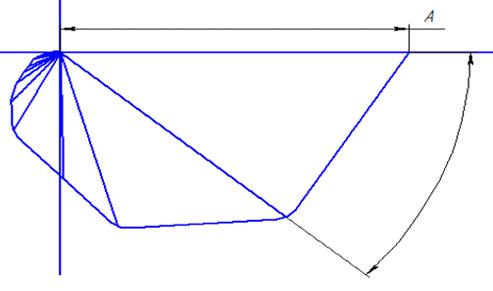
Рисунок-8. АФЧХ системы.
3. Исследование системы стабилизаций частоты вращения
двигателя с корректирующей цепью

Рисунок 9 - Схема системы стабилизаций с корректирующим звеном
Составляем новую структурную схему замкнутой системы.
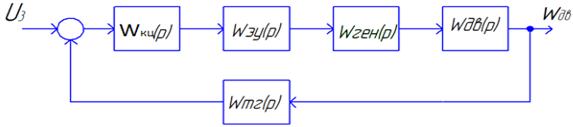
Рисунок 10 - Структурная схема замкнутой системы
Составляем новую структурную схему разомкнутой системы.

Рисунок 11 - Структурная схема разомкнутой системы
Составляем передаточные функций отдельных звеньев.
Составляем передаточную функцию разомкнутой системы.
Передаточная функция разомкнутой системы представляет собой произведение
передаточных функций звеньев прямой ветви на передаточную функцию контура
обратной связи.
Оценка устойчивости системы по критерию Гурвица
Дана передаточная функция разомкнутой системы:

Для получения характеристического уравнения замкнутой системы необходимо
сложить числитель и знаменатель передаточной функции разомкнутой системы.

Составим определитель Гурвица из коэффициентов характеристического
уравнения:
Вывод: по критерию Гурвица данная система устойчива, так как выполняется
требование положительности диагональных миноров (Δi ≥ 0).
Оценка устойчивости системы по критерию Михайлова
Дана передаточная функция разомкнутой системы:
Для получения характеристического уравнения замкнутой системы необходимо
сложить числитель и знаменатель передаточной функции разомкнутой системы:

От операторной формы перейдём к частотной форме записи
характеристического уравнения, для этого вместо p подставляем jω.

где - вещественное число, полученное из слагаемых чётных степеней
j - мнимая часть, полученная из слагаемых с нечётными
степенями
Для построения годографа Михайлова необходимо произвести расчёты
вещественной и мнимой частей, изменяя ω от 0 до ∞. Расчёты сведём в
таблицу 4
Таблица 4- расчет вещественной и мнимой части
|
w
|
U(w)
|
V(w)
|
|
0
|
1
|
0
|
|
2,132
|
0
|
89,971
|
|
8,125
|
0
|
249,001
|
|
15,056
|
113,804
|
0
|
По данным таблицы 4 построим годограф Михайлова (рисунок 12)
Вывод: по критерию Михайлова система устойчива, так как годограф
Михайлова начинается при w=0 на
действительной полуоси, проходит последовательно через три квадранта против
часовой стрелки.
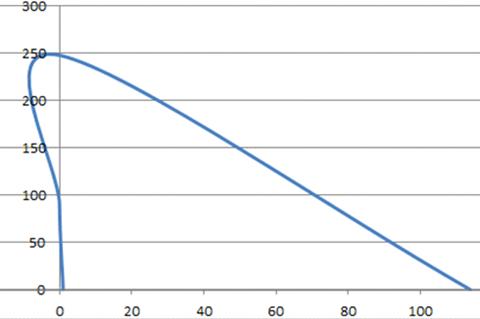
Рисунок 12- Годограф Михайлова
Оценка устойчивости системы по логарифмическим критериям
Суть этого критерия сводится к строению ЛАЧХ и ЛФЧХ и на основе этих
построений делается вывод об устойчивости системы в замкнутом состоянии.
Результирующая ЛАЧХ и ЛФЧХ представляет собой сумму ЛАЧХ и ЛФЧХ отдельных
звеньев системы: 1 апериодического звена первого порядка, 1 апериодического
звена второго порядка и 3 усилительных звеньев.
Wэу=12; Усилительные
звенья.
Wтг=0,32;
Апериодическое звено первого порядка.
Апериодическое звено второго порядка. 
Реально дифференцирующее звено. 
У усилительных звеньев горизонтальный участок ЛАЧХ пройдет вдоль оси
абсцисс на уровне 20log(k). Апериодическое звено первого
порядка возьмет начало из точки 20log(k), с одной точкой среза wcр=1/Т под углом 20дБ. Апериодическое
звено второго порядка возьмет начало из точки 20log(k), с
двумя точками среза wcр=1/Т, первый
срез будет под углом 20дБ, а второй под углом 40дБ.
Wкц=20log(7,008)=16,911;
Wкц.ср=log(7,008/0,1008)=1,84;
Wэу=20log(12)=21,58;
Wтг=20log(0,32)=-9,89;
Wген=20log(2,34)=7,38;
Wдв=20log(0,67)=-3,47;
Вывод: система устойчива в замкнутом состоянии, так как при любом
значении φ ЛАЧХ не пересекает угол -180 .
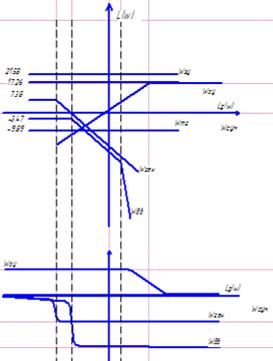
Рисунок-6. ЛАЧХ и ЛФЧХ системы.
Оценка устойчивости системы по критерию Найквиста

Заменяем p на (jw), получаем:

Понижаем степень j,
получаем:
Избавляемся от мнимости в знаменателе, получаем:

Находим корни числителя мнимой и действительной части полинома.

Для построения годографа Найквиста необходимо произвести расчёты
вещественной и мнимой частей.
Расчёты сведём в таблицу 5
Таблица 5 - Расчет вещественной и мнимой части.
|
w
|
Re
|
jIm
|
|
0
|
0
|
0
|
|
0,702
|
0
|
63,206
|
|
2,132
|
4817
|
0
|
|
8,275
|
-4,054
|
0
|
По данным таблицы 2 построим годограф Найквиста (рисунок 7)
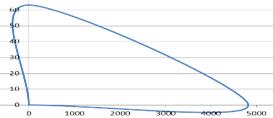
Рисунок-7. Годограф Найквиста
Вывод: Данная система не устойчивая, так как ее АФЧХ охватывает точку с
координатами (-1; j0).

Амплитудно-частотная характеристика
Фазовая частотная характеристика
Таблица - 6. Таблица расчетов амплитудно-частотная характеристик и
фазовая частотная характеристика.
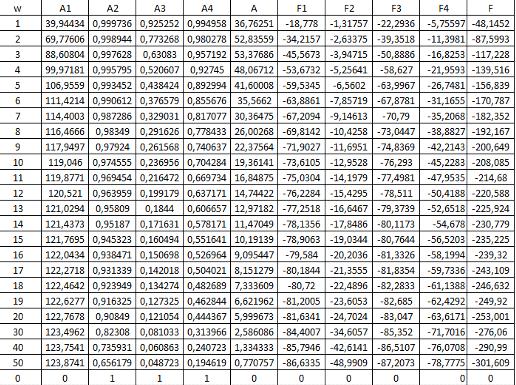
По данным таблицы-3 строим АФЧХ (Рисунок 8)

Рисунок-8. АФЧХ системы.
управление двигатель частотный гурвиц
Заключение
В любой управляемой системе есть два объекта - управляемый и управляющий.
Например, при управлении частотой вращения объект управления - это двигатель
(электромотор, турбина); в задаче поддержания уровня громкости - динамик.
Самый знаменитый из первых механических регуляторов - центробежный
регулятор Уатта, для стабилизации частоты вращения паровой турбины. Регулятор
действует на объект управления не прямо, а через исполнительные механизмы
(приводы), которые могут усиливать и преобразовывать сигнал управления,
например, электрический сигнал может «превращаться» в перемещение клапана,
регулирующего расход топлива, или в поворот руля на некоторый угол. Для
контроля управления необходимы датчики, снимающие характеристики объекта,
которыми необходимо управлять. Качество управления можно улучшить, если
получать дополнительную информацию - измерять внутренние свойства объекта.
Библиографический список
1.
Лихошерст В.И.
Полупроводниковые преобразователи электрической энергии для электроприводов с
двигателями постоянного тока. Свердловск: УПИ, 2007. 80 с.
2.
Лихошерст В.И.
Системы управления полупроводниковыми преобразователями электрической энергии:
Учебное пособие. 2-е изд., испр. Екатеринбург: УГТУ, 2010. 104 с.
3.
Расчет системы
импульсно-фазового управления (СИФУ): Методические указания к курсовому проекту
по дисциплине “Преобразовательные устройства”/ В.И. Лихошерст, А.В. Костылев.
Екатеринбург: УГТУ-УПИ, 2008. 36 с.
4.
Руденко В.С.,
Сенько В.И., Чиженко И.М. Основы преобразовательной техники: Учебник для вузов.
- 2-е изд., перераб. и доп. - М.: Высшая школа, 2010. 42