Проектирование электропривода переменного тока перемещения стола продольно-строгального станка с усилием резания 50 кН
Курсовая
работа
по
дисциплине: «Электрический привод»
Тема:
Проектирование
электропривода переменного тока перемещения стола продольно-строгального станка
с усилием резания 50 кН
СОДЕРЖАНИЕ
Реферат
Введение
.
Задание и исходные данные к проекту
.
Выбор типа электропривода
.
Выбор и проверка электродвигателя
.1
Расчёт мощности двигателя
.2
Предварительный выбор двигателя
.3
Расчет передаточного числа редуктора
.4
Расчет и построение нагрузочной диаграммы двигателя
.5
Проверка двигателя по нагреву
4.
Выбор основных узлов силовой части электропривода
4.1
Выбор тиристорного преобразователя
4.2
Выбор силового трансформатора
.3
Выбор сглаживающего реактора
4.4
Разработка принципиальной электрической схемы силовой части электропривода
5.
Расчет параметров математической модели силовой части электропривода
.1
Расчет параметров силовой чисти электропривода в абсолютных единицах
.2
Выбор базисных величин системы относительных единиц
.3
Расчет параметров силовой части электропривода в относительных единицах
.4
Расчет коэффициентов передачи датчиков
.
Разработка системы управления электроприводом
.1
Выбор типа системы управления электроприводом
.2
Расчет регулирующей части контура тока якоря
.2.1
Расчет параметров математической модели контура тока
.2.2
Конструктивный расчет регулятора тока
.3
Расчет регулирующей части контура скорости
.3.1
Расчет параметров математической модели контура скорости
.3.2
Конструктивный расчет регулирующей части контура скорости
.4
Расчет задатчика интенсивности
.4.1
Расчет параметров математической модели задатчика интенсивности
.4.2
Конструктивный расчет задатчика интенсивности
.
Основы теории систем подчиненного регулирования
.1
Обобщенная схема многоконтурной системы подчиненного регулирования
.2
Синтез регуляторов
.2.1
Синтез регулятора первого контура и его свойства
.
Системы регулирования тока якоря
.1
Функциональная схема САР тока якоря
.2
Синтез регуляторов тока якоря
.3
Анализ свойств САР тока якоря
Заключение
Список
использованных источников
РЕФЕРАТ
Курсовой проект содержит 84 листов печатного
текста, 47 рисунков, 3 таблицы, 10 использованных источников.
Произведен расчет силовой части системы:
«Частотный преобразователь ― двигатель»,
включающий в себя:
· предварительный выбор двигателя;
· расчет и построение нагрузочной
диаграммы и проверка двигателя на нагрев;
· выбор частотного преобразователя;
· моделирование электропривода в MATLAB.
ВВЕДЕНИЕ
Строгальные станки предназначены для обработки
резцами плоскостей и фасонных линейчатых поверхностей. Они делятся на поперечно-строгальные,
продольно-строгальные и долбежные. Первые применяются при изготовлении мелких и
средних по размерам деталей, вторые сравнительно крупных или для одновременного
строгания нескольких деталей среднего размерам. Долбежные станки используют для
обработки шпоночных пазов, канавок фасонных поверхностей небольшой длины.
Станки имеют рабочий ход, во время которого происходит резание, и обратный ход,
когда инструмент возвращается в исходное положение.
Размерной характеристикой продольно-строгальных
станков являются наибольшие размеры обрабатываемых деталей (ширина, длина,
высота). Промышленность Советского Союза выпускает, станки от 630×2000×550
до
5000×125000×1250
мм
включительно выпускаются в одностоечном исполнении.
У продольно-строгальных станков подвижной частью
является стол с закрепленной на нем заготовкой. В зависимости от устройства
поперчены, различают одностоечные и двустоечные станки. Первые применяют для
обработки крупных деталей, ширина которых выходит за пределы расстояния между
колоннами станков двустоечного исполнения.
На рис. 1 показан продольно-строгальный станок
7212. На нем можно строгать детали с наибольшими размерами 1250×4000×1120
мм.
На направляющих 1 станины 2 размещен стол 3, на котором закрепляются
обрабатываемые детали. Он получает возвратно-поступательное движение. На двух
порталах (стойках) 4 и 5 установлена траверса, несущая два вертикальных
суппорта 8. В направляющих правого портала может иметь вертикальные
перемещения боковой суппорт. В коробке 10 расположен привод главного движения,
в коробках 7 и 9 - приводы вертикальных и боковых суппортов.
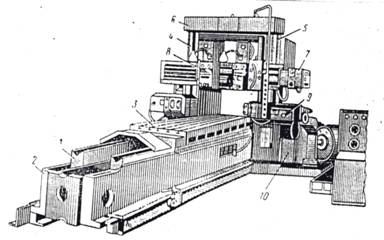
Рис. 1. Продольно-строгальный станок 7212
Главное движение осуществляется от регулируемого
электродвигателя переменного тока. Рабочий ход передается через двухступенчатую
коробку скоростей на передачу червяка - рейка по следующему циклу: медленное
перемещение стола при врезании резца в заготовку, разгон стола до рабочей
скорости перед выходом резца из заготовки, возврат стола в исходное положение.
Для изменения скоростей имеется специальный механизм, смонтированный на коробке
скоростей. Реверсирование осуществляется электродвигателем.
Движение подачи осуществляется реверсивным
электродвигателем, от которого вращение передачи червячной парой на вал коробки
подач. На этом валу на шпонке смонтирован диск, на котором установлен фрикцион,
связанный пальцем с диском, несущем собачку храпового механизма. Собачка
вращает храповое колесо и связанное с ним колесо. От него вращение передается
на раздаточный вал и далее через зубчатые колеса на колеса, связанные с
полумуфтами. Верхний и нижний валы служат для горизонтального перемещения
суппортов, а средние валы для вертикального перемещения.
Периодическая подача суппортов осуществляется
следующим образом. В момент реверсирования стола с обратного хода на рабочий
подается команда электродвигателя. Вращение его происходит до тех пор, пока
разжимная планка фрикциона не упрется в неподвижный упор и не разожмет
фрикцион. При нажатии кулачка наконечник реверса стола в начале рабочего хода
электродвигатель отключается. Механизм подачи бокового суппорта устроен
аналогичным образом. Установка подачи осуществляется храповым колесом. При его
вращении приводится в движение подвижный упор. При этом изменяется угол между подвижным
и не подвижным упорами тем самым величина подачи.
Установочные перемещения заимствуют движение от
электродвигателя, который вращается в направлении рабочей подачи. Одновременно
включается электромагнит, который сцепляет червячное колесо с храповым колесом
при помощи кулачковой муфты. Далее движение следует по предыдущему. Кнопка
установочного перемещения находится на подвесной станции, на которой
располагаются и другие кнопки управления. Кроме кнопок управления, на станке
имеются средства ручного управления и наладочного перемещения суппортов.
1. ЗАДАНИЕ И ИСХОДНЫЕ ДАННЫЕ К ПРОЕКТУ
Рис. 2. Кинематическая схема
продольно-строгального станка
Исходные данные для расчёта
электропривода продольно-строгального станка приведены в табл. 1.
Таблица 1
Исходные данные
|
Исходные
данные
|
Условные
обозначения
|
Значение
|
|
Усилие
резания
|
Fz
|
50к Н
|
|
Скорость
прямого хода
|
Vпр
|
0,3
м/с
|
|
Кратность
обратной скорости и рабочей скорости прямого хода
|
Кобр
|
2
м/с
|
|
Масса
стола
|
mc
|
3500
кг
|
|
Масса
детали
|
mд
|
8000
кг
|
|
Радиус
ведущей шестерни
|
rш
|
0,25
м
|
|
Длина
детали
|
Lд
|
4,5
м
|
|
Путь
подхода детали к резцу
|
Lп
|
0,2
м
|
|
Путь
после выхода резца из детали
|
Lв
|
0,15
м
|
|
Коэффициент
трения стола о направляющие
|
μ
|
0,07
|
|
КПД
механической передачи при рабочей нагрузке
|
ηпN
|
0,95
|
|
КПД
механических передач при перемещении стола на холостом ходу
|
ηпхх
|
0,5
|
|
Отношение
пониженной скорости к рабочей скорости
|
Кпон
|
0,4
|
Металлорежущие станки являются весьма
распространенной, многочисленной группой машин и орудий, предназначенных для
механической обработки изделий из металла при помощи одного или нескольких
инструментов. Продольно-строгальные станки применяются в основном для обработки
резцами плоских горизонтальных и вертикальных поверхностей у крупных деталей
большой длины. На станках можно производить прорезание продольно-прямоугольных
канавок различного профиля, Т-образных пазов и множество других операций.
Главное движение - это перемещение стола, за
счет которого инструмент производит резание металла и движение подачи, которое
обуславливает перемещение инструмента для снятия нового слоя металла.
Основными величинами, характеризующими размеры и
технологические возможности различных продольно-строгальных станков, являются:
длина строгания, ход стола (1,5-12 м), ширина обработки (0,7-4 м), наибольшее
тяговое усилие (30-150 кН).
Процесс обработки изделия на продольно-строгальном
станке состоит из последовательно повторяющихся циклов. Каждый из них включает
в себя прямой, то есть рабочий ход и обратный, когда стол возвращается в
исходное положение и осуществляется подача резцов во время реверса стола с
обратного хода на прямой. Нормативная скорость прямого хода, скорость резания
определяется твердостью обрабатываемого материала, свойствами режущего
инструмента и видом обработки (черновое, чистовое).
Поскольку при строгании резец испытывает ударную
нагрузку, то значение максимальных скоростей строгания не превосходит 75-120
м/мин. При этом скорость вхождения резца в металл, в сравнении со скоростью
резания ограничивается до 40% и меньше, в зависимости от обрабатываемого
материала, чтобы избежать крошки.
Указанные обстоятельства ограничивают
производительность и для ее повышения необходимо сократить непроизводительное
время движения. Обратный ход осуществляется на повышенной скорости, а
пуско-тормозные режимы при реверсе принимают допустимо минимальной
продолжительности. Привод должен быть управляемым по скорости, поскольку для
различных материалов используются различные оптимальные и максимально
допустимые скорости строгания; кроме того, движение характеризуется различными
скоростями на разных интервалах времени рабочего цикла, высокой частотой
реверсирования с большим пуско-тормозным моментом.
Для механизма перемещения стола
продольно-строгального станка выбрать тип электропривода, выполнить выбор
электродвигателя и его проверку по нагреву и перегрузке, выбрать силовой преобразовательный
агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы
автоматического управления электроприводом, выполнить компьютерное
моделирование системы автоматизированного электропривода в типовых режимах.
Требования к электроприводу:
1. Обеспечение работы механизма по следующему
циклу:
• подход детали к резцу с пониженной скоростью;
• врезание на пониженной скорости;
• разгон до рабочей скорости прямого хода;
• резание на скорости прямого хода;
• замедление до пониженной скорости перед
выходом резца;
• выход резца из детали;
• замедление до остановки;
• разгон в обратном направлении до рабочей
скорости обратного хода;
• возврат стола на холостом ходу со скоростью
обратного хода;
• замедление до остановки (стол возвращается в
исходное положение). Пониженную скорость принять 40 % от скорости прямого хода.
2. Обеспечение рекуперации энергии в тормозных
режимах.
3. Разгоны и замедления должны проходить с
постоянством ускорения. Обеспечение максимально возможных ускорений в переходных
режимах.
. Статическая ошибка по скорости при
резании не должна превышать 10 %.
. Ограничение момента электропривода при
механических перегрузках.
2. ВЫБОР ТИПА
ЭЛЕКТРОПРИВОДА
При выборе типа электропривода, прежде всего,
учитывается условие работы производственного механизма. Высокая
производительность и качество выпускаемой продукции могут быть обеспечены лишь
при правильном учёте статических и динамических характеристик привода и рабочей
машины. Кинематика, и даже конструкция рабочей машины в значительной степени
определяются типом применяемого ЭП, и, наоборот, в зависимости от
конструктивных особенностей исполнительного механизма привод претерпевает
значительные изменения.
При выборе типа ЭП должны быть учтены: характер
статического момента, необходимые пределы регулирования скорости, плавности
регулирования, требуемых механических характеристик, условий пуска и
торможения, числа включений в час, качества окружающей среды и т.п.
Первоначально решается вопрос о выборе
регулируемого или нерегулируемого типа ЭП. В последнем случае задача
значительно упрощается. Все сводится к выбору двигателя переменного тока
(асинхронные двигатели). В случае с регулированием по скорости решается вопрос
о выборе рода тока привода.
Применение постоянного тока может быть оправдано
лишь в тех случаях, когда привод должен обеспечивать повышенные требования к
плавности регулирования скорости. Приводы постоянного тока используются в
механизмах, работающих в повторно-кратковременном режиме: краны, подъёмные
механизмы, вспомогательные механизмы металлургической промышленности (шлепперы,
рольганги, нажимные устройства).
В случае приводов повторно-кратковременного
режима тип двигателя определяется из условий получения минимальной деятельности
переходного процесса, минимальных динамических моментов. С этой целью либо
используют специальные двигатели с минимальным моментом инерции, либо переходят
к двухдвигательному приводу (суммарный момент инерции двух двигателей той же
мощности, что и однодвигательный привод меньше на 20 - 40%).
Для электропривода продольно-строгального станка
возможно использование следующих ЭП:
«ТПЧ-АД» (тиристорный или транзисторный
преобразователь частоты - асинхронный двигатель);
«Г-Д» (генератор - двигатель);
«ТП-Д» (тиристорный преобразователь -
двигатель).
Система «ТПЧ-АД» в принципе, позволяет получить
характеристики, аналогичные «ТП-Д», но стоимость частотного преобразователя
гораздо выше управляемого выпрямителя.
К недостаткам системы «Г-Д» относят:
необходимость в двукратном преобразовании
энергии, что приводит к значительному снижению КПД;
наличие двух машин в преобразовательном
агрегате;
значительные габариты установки;
высокие эксплуатационные расходы.
Для электропривода главного движения
продольно-строгального станка принимаем систему «ПЧ-АД».
3. ВЫБОР И ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ
.1 Расчёт мощности двигателя
Для выбора двигателя необходимо рассчитать его
требуемую номинальную мощность, исходя из нагрузочной диаграммы механизма (т.е.
временной диаграммы моментов или сил статического сопротивления механизма на
его рабочем органе). По рассчитанной мощности затем выполняется предварительный
выбор двигателя.
Построим нагрузочную диаграмму механизма (график
статических нагрузок механизма). Расчет времени участков цикла на этапе
предварительного выбора двигателя выполняем приблизительно, т.к. пока нельзя
определить время разгона и замедления (суммарный момент инерции привода до
выбора двигателя неизвестен).
Пониженная скорость прямого хода стола:
пон
= Кпон ∙ Vпр = 0,4 ∙ 0,3 = 0,12 м/с, (1)
где Vпон - пониженная скорость прямого хода
стола, м/с;
Кпон - кратность пониженной и рабочей скоростей
прямого хода;пр - скорость прямого хода, м/с.
Скорость обратного хода стола:
обр
= Кобр ∙ Vпр = 2 ∙ 0,3 = 0,6 м/с, (2)
где Кобр - кратность обратной скорости и рабочей
скорости прямого хода.
Усилие перемещения стола на холостом ходу:
хх
= (mc + mд) ∙ g ∙
μ = (3500 + 8000) ∙ 9,81 ∙ 0,07 = 7,9 кН,
(3)
где Fхх - усилие перемещения стола на
холостом ходу, кН;c - масса стола, кг;д - масса детали,
кг;- ускорение свободного падения (g=9,81 м/с2);
μ - коэффициент трения
стола о направляющие.
Усилие перемещения стола при резании:
р
= Fz + Fхх = 50 + 7,9 = 57,9 кН, (4)
где Fр - усилие перемещения стола при
резании, кН;z - усилие резания, кН.
Время резания (приблизительно):
p =
Lд / Vпр = 4,5 / 0,3 = 15 с, (5)
где tp - время резания, с;д
- длина детали, м.
Время подхода детали к резцу (приблизительно):
п
= Lп / Vпон = 0,2 / 0,12 = 1,67 с, (6)
где tп - время подхода детали к
резцу, с;п - путь подхода детали к резцу, м.
Время прямого хода после выхода резца из детали
(приблизительно):
в
= Lв / Vпон = 0,15 / 0,12 = 1,25 с, (7)
где tв - время прямого хода после
выхода резца из детали, с;в - путь после выхода резца из металла, м.
Время возврата стола (приблизительно):обр
=( Lп + Lд + Lв) / Vобр = (0,2 +
4,5 + 0,15) / 0,6 = 8,08 с, (8)
где tобр - время возврата стола, с.
Время цикла (приблизительно):
ц
= tп + tp + tв + tобр = 1,67 + 15+
1,25 + 8,08 = 26 с, (9)
где tц - время цикла, с.
Исходя из расчетов строится нагрузочная
диаграмма, рис. 3.
Рис. 3. Нагрузочная диаграмма механизма
Эквивалентное статическое усилие за время работы
в цикле:

где Fэкв - эквивалентное
статическое усилие за время работы в цикле, кН.
При расчете требуемой номинальной
мощности двигателя предполагаем, что будет выбран двигатель, номинальные данные
которого определены для повторно-кратковременного режима работы и стандартного
значения продолжительности включения ПВN = 40%. Номинальной скорости двигателя
должна соответствовать скорость обратного хода штанг, которая является
максимальной скоростью в заданном рабочем цикле. Такое соответствие объясняется
тем, что принято однозонное регулирование скорости, осуществляемое вниз от
номинальной скорости двигателя.
Расчетная мощность двигателя:
 (11)
(11)
где Ррас - расчетная
мощность двигателя, кВт;з - коэффициент запаса (примем Kз = 1,1).
.2 Предварительный выбор двигателя
Выбираем двигатель серии Д. Для
продольно-строгального станка выбираем двигатель с естественным охлаждением,
номинальные данные которого определены для продолжительного режима работы с продолжительностью
включения ПВN = 40 %. Номинальные данные двигателя приведены в табл. 2.
Таблица 2
Данные выбранного двигателя
4А250М6У3
|
Параметр
|
Обозначение
|
Значение
|
|
Номинальная
мощность двигателя, кВт
|
РN
|
38
|
|
Номинальное
напряжение якоря, В
|
UяN
|
220
|
|
Номинальный
ток якоря, А
|
IяN
|
192
|
|
Номинальная
частота вращения, об/мин
|
nN
|
565
|
|
Максимальный
допустимый момент, мН
|
Mmax
|
2795
|
|
Cопротивление обмотки якоря,
Ом
|
Rяо
|
0,014
|
|
Сопротивление
обмотки добавочных полюсов, Ом
|
Rдп
|
0,009
|
|
Момент
инерции якоря, кг∙м2
|
Jд
|
7
|
|
Число
пар полюсов
|
рп
|
2
|
|
Максимально
допустимый коэффициент пульсаций тока якоря
|
KI(доп)
|
0,15
|
Для дальнейших расчетов потребуется ряд данных
двигателей, которые не приведены в справочнике. Выполним расчет недостающих
данных двигателя:
Сопротивление цепи якоря двигателя, приведенное
к рабочей температуре:
 Ом (12)
Ом (12)
где Кш - коэффициент увеличения
сопротивления при нагреве до рабочей температуры (кш = 1,38 для
изоляции класса Н при пересчете от 20‘С).
Номинальная ЭДС якоря:
 В (13)
В (13)
Номинальная угловая скорость:
ΩN = nN ∙  = 565 ∙
= 565 ∙
 = 59,14
рад/с, (14)
= 59,14
рад/с, (14)
где ΩN -
номинальная угловая скорость, рад/с;- номинальная частота вращения, об/мин.
Конструктивная постоянная двигателя,
умноженная на номинальный магнитный поток:
 Вб (15)
Вб (15)
Номинальный момент двигателя:
 Нм(16)
Нм(16)
где МN -
номинальный момент двигателя, Нм;
Момент холостого хода двигателя:
∆М = МN -  = 774,3 -
= 774,3 -  = 131,8 Нм,
(17)
= 131,8 Нм,
(17)
где ∆М - момент холостого хода двигателя,
Нм;
 - номинальная мощность двигателя,
Вт.
- номинальная мощность двигателя,
Вт.
Индуктивность цепи якоря двигателя:
 Гн (18)
Гн (18)
.3 Расчет передаточного числа
редуктора
Расчет передаточного числа редуктора
iр выполняется так, чтобы максимальной скорости рабочего органа механизма
соответствовала номинальная скорость двигателя.
Передаточное число редуктора:
р =  (19)
(19)
где iр - передаточное число редуктора;
 - радиус ведущей шестерни, м.
- радиус ведущей шестерни, м.
.4 Расчет и построение нагрузочной диаграммы
двигателя
Для проверки предварительно выбранного двигателя
по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е.
временной диаграммы момента двигателя без учета электромагнитных переходных
процессов). Для ее построения произведем расчёт передаточного числа редуктора,
приведение моментов статического сопротивления и рабочих скоростей к валу
двигателя, определим суммарный момент инерции привода и зададимся динамическим
моментом при разгоне и замедлении привода. По результатам расчета строится
нагрузочная диаграмма, а также тахограмма двигателя.
Момент статического сопротивления при резании,
приведенный к валу двигателя:
 Нм, (20)
Нм, (20)
где  - момент статического сопротивления
при резании, приведенный к валу двигателя, Нм;
- момент статического сопротивления
при резании, приведенный к валу двигателя, Нм;
 - КПД механической передачи при
рабочей нагрузке.
- КПД механической передачи при
рабочей нагрузке.
Момент статического сопротивления при
перемещении стола на холостом ходу, приведенный к валу двигателя:
 Нм, (21)
Нм, (21)
где  - момент статического сопротивления
при перемещении стола на холстом ходу, приведенный к валу двигателя, Нм;
- момент статического сопротивления
при перемещении стола на холстом ходу, приведенный к валу двигателя, Нм;
 - КПД механической передачи при
перемещении стола на холостом ходу.
- КПД механической передачи при
перемещении стола на холостом ходу.
Пониженная скорость, приведенная к валу
двигателя:
 рад/с, (22)
рад/с, (22)
где  - пониженная скорость, приведенная
к валу двигателя, рад/с.
- пониженная скорость, приведенная
к валу двигателя, рад/с.
Скорость прямого хода, приведенная к
валу двигателя:
 рад/с, (23)
рад/с, (23)
где  - скорость прямого хода,
приведенная к валу двигателя, рад/с.
- скорость прямого хода,
приведенная к валу двигателя, рад/с.
Скорость обратного хода, приведенная
к валу двигателя:
 рад/с, (24)
рад/с, (24)
где  - скорость обратного хода,
приведенная к валу двигателя, рад/с.
- скорость обратного хода,
приведенная к валу двигателя, рад/с.
Суммарный момент инерции
механической части привода:
 кг∙м2, (25)
кг∙м2, (25)
где  - суммарный момент инерции
механической части привода, кг∙м2;
- суммарный момент инерции
механической части привода, кг∙м2;
δ - коэффициент, учитывающий
моменты инерции полумуфт, ведущей шестерни и редуктора (принимаем δ = 1,2);
 - момент инерции двигателя, кг∙м2.
- момент инерции двигателя, кг∙м2.
Модуль динамического момента
двигателя по условию максимального использования двигателя по перегрузочной
способности:
Мдин = k∙(Мmax - Мср )
= 0,95∙(2795 - 750,2) = 1942,56 Нм, (26)
k -
коэффициент, учитывающий увеличение максимального момента на уточненной
нагрузочной диаграмме; k = 0,95.
Ускорение вала двигателя в
переходных режимах:
 рад/с2, (27)
рад/с2, (27)
где ε - ускорение
вала двигателя в переходных режимах, рад/с2.
Ускорение стола в переходных
режимах:
 м/с2, (28)
м/с2, (28)
где а - ускорение стола в переходных
режимах, рад/с2.
Разбиваем нагрузочную диаграмму на
12 интервалов. Сначала рассчитываем интервалы разгона и замедления
электропривода, затем интервалы работы с постоянной скоростью.
Интервал 1. Разгон до пониженной
скорости.
Продолжительность интервала 1:
 с, (29)
с, (29)
где t1 -
продолжительность интервала 1, с.
Путь, пройденный столом на интервале
1:
 м, (30)
м, (30)
где L1 - путь,
пройденный столом на интервале 1, м.
Момент двигателя на интервале 1:
М1 = Мс.хх +
|Мдин| = 330,9 +1942,56 = 2273,46 Нм, (31)
где М1 - момент двигателя
на интервале 1, Нм.
Интервал 4. Разгон от пониженной
скорости до скорости прямого хода.
Продолжительность интервала 4:
 с, (32)
с, (32)
где t4 -
продолжительность интервала 4, с.
Путь, пройденный столом на интервале
4:
 м, (33)
м, (33)
где L4 - путь,
пройденный столом на интервале 4, м.
Момент двигателя на интервале 4:
М4 = Мср + Мдин
= 750,5 + 1942,56 = 2693 Нм, (34)
где М4 - момент двигателя на
интервале 4, Нм.
Интервал 6. Замедление от скорости прямого хода
до пониженной скорости. Продолжительность интервала 6:
 с, (35)
с, (35)
где t6 -
продолжительность интервала 6, с.
Путь, пройденный столом на интервале
6:
 м, (36)
м, (36)
где L6 - путь,
пройденный столом на интервале 6, м.
Момент двигателя на интервале 6:
М6 = Мср - Мдин
= 750,5 - 1942,56 = - 1192 Нм, (37)
где М6 - момент двигателя
на интервале 6, Нм.
Интервал 9. Замедление от пониженной
скорости до остановки.
Продолжительность интервала 9:
 с, (38)
с, (38)
где t9 -
продолжительность интервала 9, с.
Путь, пройденный столом на интервале
9:
 м, (39)
м, (39)
где L9 - путь,
пройденный столом на интервале 9, м.
Момент двигателя на интервале 9:
М9 = Мс.хх - Мдин
= 330,9 - 1942,56 = -1611,66 Нм, (40)
где М9 - момент двигателя
на интервале 9, Нм.
Интервал 10. Разгон до пониженной
скорости обратного хода.
Продолжительность интервала 10:
 с, (41)
с, (41)
где t10 -
продолжительность интервала 10, с.
Путь, пройденный столом на интервале
10:
 м, (42)
м, (42)
где L10 - путь,
пройденный столом на интервале 10, м.
Момент двигателя на интервале 10:
М10 = - Мс.хх
- Мдин = - 330,9 - 1942,56 = - 2273,46 Нм, (43)
где М10 - момент
двигателя на интервале 10, Нм.
Интервал 12. Замедление от скорости
обратного хода до остановки.
Продолжительность интервала 12:
 с, (44)
с, (44)
где t12
- продолжительность интервала 12, с.
Путь, пройденный столом на интервале 12:
 м, (45)
м, (45)
где L12 - путь,
пройденный столом на интервале 12, м.
Момент двигателя на интервале 12:
М12 = - Мс.хх
+ |Мдин| = - 330,9 + 1942,56 = 1611,66 Нм, (46)
где М12 - момент
двигателя на интервале 12, Нм.
Продолжительность интервала 2:
 с, (47)
с, (47)
где t2 -
продолжительность интервала 2, с.
Путь, пройденный столом на интервале
2:
 м, (48)
м, (48)
где L2 - путь,
пройденный столом на интервале 2, м.
Момент двигателя на интервале 2:
М2 = Мс.хх =
330,9 Нм, (49)
где М2 - момент двигателя
на интервале 2, Нм.
Интервал 8. Движение с пониженной
скоростью после выхода резца из детали. Продолжительность интервала 8:
 с, (50)
с, (50)
где t8 -
продолжительность интервала 8, с.
Путь, пройденный столом на интервале
8:
 м, (51)
м, (51)
где L8 - путь,
пройденный столом на интервале 8, м.
Момент двигателя на интервале 8:
М8 = Мс.хх =
330,9 Нм, (52)
где М8 - момент двигателя
на интервале 8, Нм.
Интервал 3. Резание на пониженной
скорости (после врезания).
Продолжительность интервала 3:
 с, (53)
с, (53)
где t3 -
продолжительность интервала 3, с.
Путь, пройденный столом на интервале
3:
 м, (54)
м, (54)
где L3 - путь,
пройденный столом на интервале 3, м.
Момент двигателя на интервале 3:
М3 = Мср =
728,6 Нм, (55)
где М3 - момент двигателя
на интервале 3, Нм.
Интервал 7. Резание на пониженной
скорости (перед выходом резца).
Продолжительность интервала 2:
 с, (56)
с, (56)
где t7 -
продолжительность интервала 7, с.
Путь, пройденный столом на интервале
7:
 м, (57)
м, (57)
где L7 - путь,
пройденный столом на интервале 7, м.
Момент двигателя на интервале 7:
М7 = Мср =
750,2 Нм, (58)
где М7 - момент двигателя
на интервале 7, Нм.
Интервал 5. Резание на скорости
прямого хода.
Продолжительность интервала 5:
 с, (59)
с, (59)
где t5 -
продолжительность интервала 5, с.
Путь, пройденный столом на интервале
5:
 м
м
где L5 - путь,
пройденный столом на интервале 5, м.
Момент двигателя на интервале 5:
М5 = Мср =
750,2 Нм, (61)
где М5 - момент двигателя
на интервале 5, Нм.
Интервал 11. Возврат стола со
скоростью обратного хода.
Продолжительность интервала 11:
 с, (62)
с, (62)
где t11 -
продолжительность интервала 11, с.
Путь, пройденный столом на интервале
11:
 м, (63)
м, (63)
где L11 - путь,
пройденный столом на интервале 11, м.
Момент двигателя на интервале 11:
М11 = - Мс.хх
= - 330.9 Нм, (64)
где М11 - момент
двигателя на интервале 11, Нм.
По приведенным выше расчетам строим
упрощенную нагрузочную диаграмму и тахограмму двигателя, рис. 4.
Рис. 4. Тахограмма и нагрузочная диаграмма
электропривода механизма перемещения стола продольно-строгального станка
.5 Проверка двигателя по нагреву
Для проверки выбранного двигателя по нагреву
используем метод эквивалентного момента. Используя нагрузочную диаграмму,
находим эквивалентный по нагреву момент за цикл работы привода. Для нормального
теплового состояния двигателя необходимо, чтобы эквивалентный момент был не
больше номинального момента двигателя.
Эквивалентный момент за цикл работы (по
нагрузочной диаграмме):
 Нм, (65)
Нм, (65)
где Мэкв - эквивалентный момент за
цикл работы, Нм.
Условие Мэкв ≤ МN выполняется,
следовательно, выбранный двигатель проходит по нагреву.
Запас по нагреву:
 %, (66)
%, (66)
где D - запас по нагреву, %.
Запас должен быть не менее 5%.
4. ВЫБОР ОСНОВНЫХ УЗЛОВ СИЛОВОЙ ЧАСТИ
ЭЛЕКТРОПРИВОДА
.1 Выбор тиристорного преобразователя
Для обеспечения реверса двигателя и рекуперации
энергии в тормозных режимах выбираем двухкомплектный реверсивный
преобразователь для питания цепи якоря. Принимаем встречно-параллельную схему
соединения комплектов и раздельное управление комплектами. Выбираем трехфазную
мостовую схему тиристорного преобразователя. Проектирование самого тиристорного
преобразователя не входит в задачи курсового проекта. Поэтому выбираем
стандартный преобразователь, входящий в состав комплектного тиристорного электропривода
КТЭУ. Подробные сведения о комплектных электроприводах КТЭУ приведены в
справочнике (1).
Номинальные значения напряжения и тока
преобразователя выбираются по табл. З. Номинальное напряжение преобразователя UdN
выбирается так, чтобы оно соответствовало номинальному напряжению якоря
двигателя (UdN должно быть больше номинального напряжения якоря
двигателя на 5-15%). Номинальный ток преобразователя IdN выбирается
из ряда стандартных значении (см. табл. 3). Его значение должно быть равным или
ближайшим по отношению к номинальному току якоря двигателя.
Таблица 3
Стандартные значения номинального напряжения и
номинального тока тиристорного преобразователя
|
UяN
|
220
|
440
|
|
UdN
|
230
|
460
|
|
IdN
|
25,50,100,200,320,500
800,1000,1600,2500
|
25,50,100,200,320,500,
800,1000,1600,2500,3200,4000
|
Выберем преобразователь с параметрами (Uя
N
= 220; UdN
= 230В, IdN
= 200A)
Выберем способ связи тиристорного преобразователя с сетью.
Если IdN
<200 А, то питание цепи возбуждения в электроприводе КТЭУ выполняется од
однофазной сети переменного тока с напряжением 380 В через мостовой
выпрямитель. При больших номинальных токах - от трехфазной сети с напряжением
380 В через нереверсивный мостовой тиристорный преобразователь..
.2 Выбор силового трансформатора
При трансформаторном варианте связи с сетью
следует выбрать трансформатор типа ТСП-трехфазный двухообмоточный сухой с
естественным воздушным охлаждением открытого исполнения (или ТСЗП - защищенного
исполнения). Справочные данные о трансформаторах этого типа приведены в прил. 2.
Номинальный вторичный ток трансформатора I2n должен соответствовать
номинальному току тиристорного преобразователя IdN - Эти токи для
трехфазной мостовой схемы преобразователя связаны по формуле:
I2N = 0,816 • IdN
= 0,816 200 = 163,2 А
200 = 163,2 А
Выбираем трансформатор
ТСП-63/0,7-УХЛ4
Выпишем данные выбранного
трансформатора:
· тип трансформатора: трёхфазный
двухобмоточный сухой с естественным воздушным охлаждением открытого исполнения;
· схему соединения первичных и
вторичных обмоток У/Л;
· номинальную мощность St - 58 кВА;
· номинальное линейное напряжение
первичных обмоток U1N=380 В;
· номинальное линейное напряжение
вторичных обмоток U2n=205 В;
· номинальный линейный ток вторичных
обмоток I2n=164
А;
· мощность потерь короткого замыкания
Рk
= 1900Вт
· относительное напряжение короткого
замыкания Uk=5,5%.
Рассчитаем параметры трансформатора.
Коэффициент трансформации:

Номинальный линейный ток первичных
обмоток:
 А
А
Активное сопротивление обмоток одной
фазы трансформатора:
 Ом
Ом
Активная составляющая напряжения
короткого замыкания:

Реактивная составляющая напряжения
короткого замыкания:

Индуктивное сопротивление обмоток
одной фазы трансформатора:
 Ом
Ом
Индуктивность обмоток одной фазы
трансформатора:
 Гн
Гн
где Qc -угловая
частота сети (при частоте питающей сети 50 Гц Qc= 314
рад/с).
.3 Выбор сглаживающего реактора
Сглаживающий реактор включается в
цепь выпрямленного тока преобразователя с целью уменьшения переменной составляющей
тока (пульсаций). Пульсация выпрямленного тока должны быть ограничены на уровне
допустимого значения для выбранного двигателя. Максимально допустимый
коэффициент пульсации KI(доп) задается в
числе данных двигателя и представляет собой отношение действующего значения
переменной составляющей тока якоря к его номинальному значению. Для расчета
индуктивности сглаживающего реактора определим требуемую индуктивность всей
главной цепи системы «тиристорный преобразователь-двигатель» по условию ограничения
пульсаций.
ЭДС преобразователя при угле
управления  :
:

где Ке - коэффициент, зависящий от
схемы преобразователя (для трехфазной мостовой схемы Ке = 1,35).
Максимальная эквивалентная
индуктивность главной цепи по условию ограничения пульсаций выпрямленного тока:
 Гн
Гн
Расчетная индуктивность
сглаживающего реактора:
 Гн
Гн
.4 Разработка принципиальной
электрической схемы силовой части электропривода
На рис. 6 приведена функциональная
схема реверсивного электропривода серии КТЭУ на ток до 200 А. Тиристорный
преобразователь ТП, состоящий из двух встречно включенных мостов VSF, VSB,
получает питание от сети 380 В через автоматический выключатель QF1 и анодный
реактор LF (первый вариант) или трансформатор TM (второй вариант). На стороне
постоянного тока защита автоматическим выключателем QF2. Линейным
контактор КМ служит для частой коммутации якорной цепи (при необходимости),
торможение электродвигателя М осуществляется через контактор KV и резистор HV. Отметим,
что в первых поставках электроприводов цепь динамического торможения замыкалась
через тиристоры. Трансформатор 77 и диодный мост V служат для питания обмотки
возбуждения двигателя LM. Тахогенератор JBR
возбуждается от отдельного узла А - BR:имеется
также узел питания электромагнитного тормоза YВ. Система
управления СУ по сигналам оператора с пульта управления ПУ, сигналам о
состоянии коммутационных и защитных аппаратов получаемым из узлов управления
этими аппаратами и сигнализации УУКиС, сигналам из обшей схемы управления
технологическим агрегатом СУТА. сигналам о токе якоря двигателя и токе
возбуждения, получаемый с шунтов RS1, RS2. сигналам
о напряжении на якоре электродвигателя, снимаемым с потенциометра RP1, сигналам
о скорости, формируемым тахогенератором BR, выдает
сигналы управления в СИФУ, УУКиС и на пульт управления ПУ. Узел управления
коммутационной аппаратурой и сигнализации УУКиС по командам оператора и
сигналам от СУ включает или выключает аппараты QF1-QF3, КМ, KV, а также
осуществляет сигнализацию о состоянии этих и других защитных аппаратов.
Сигналы задания и обратных связей в
СУ гальванически разделяются от внешних протяженных цепей или цепей с высоким
потенциалом. Система управления СУ через гальванические разделители выдает в
СУТА значения необходимых регулируемых параметров (скорости тока и др.).
Устройство УУКиС получает сигналы от ПУ, датчиков; СУТА через двухпозиционные
гальванические разделители и преобразователи напряжения высокого уровня в
напряжение низкого уровня, используемое в системе. Устройство УУКиС выдает на
пульт управления и в СУТА двухпозиционные логические или контактные сигналы: о
готовности электропривода к работе, состоянии аварийной и предупреждающей
сигнализации нулевой скорости или достижении некоторой заданной скорости и т.п.
Логические сигналы подаются через гальванические разделители и преобразователи
напряжения низкого уровня в напряжение высокого уровня.
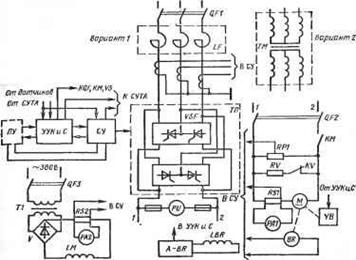
Рисунок 6. Функциональная схема
однодвигательного электропривода серии КТЭУ, Iном<200А
. РАСЧЕТ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ
МОДЕЛИ СИЛОВОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
.1 Расчет параметров силовой чисти
электропривода в абсолютных единицах
Главную цепь системы «тиристорный
преобразователь-двигатель» можно представить в виде схемы замещения (рис. 7). В
главной цепи действуют ЭДС преобразователя Ед и ЭДС якоря двигателя
Ея.
На схеме замещения показаны активные
сопротивления якорной цепи двигателя Rя сглаживающего реактора Rс
двух фаз трансформатора 2Rm а также фиктивное сопротивление Ry,
обусловленное коммутацией тиристоров. Кроме того, представлены индуктивности
якорной цепи двигателя Lя сглаживающего реактора Lc и двух фаз
трансформатора 2Lm.
Направления тока и ЭДС соответствуют
двигательному режиму электропривода (см. рис. 7).
Рисунок 7. Схема замещения главной цепи
От исходной схемы замещения переходим к
эквивалентной схеме (рис. 8), где все индуктивности объединяются в одну
эквивалентную индуктивность Lэ а все активные сопротивления в одно
эквивалентное сопротивление Rэ

Рисунок 8. Эквивалентная схема замещения главной
цепи
Определим параметры силовой части в абсолютных
единицах.
Фиктивное сопротивление преобразователя,
обусловленное коммутацией тиристоров:
 Ом
Ом
Эквивалентное сопротивление главное
цепи:
 Ом
Ом
Эквивалентная индуктивность главной
цепи:
 Гн
Гн
Электромагнитная постоянная времени
главной цепи:
 с
с
Электромагнитная постоянная времени
цепи якоря двигателя:
 с
с
Коэффициент передачи
преобразователя:
Где Uy(max) - напряжение на входе
импульсно-фазового управления тиристорного преобразователя, при котором угол
управления равен нулю и ЭДС преобразователя в режиме непрерывного тока
максимальна. В проекте примем Uy(max) =10В.
.2 Выбор базисных величин системы
относительных единиц
При рассмотрении модели силовой
части электропривода как объекта управления параметры и переменные
электропривода удобно перевести в систему относительных единиц. Переход к
относительным единицам осуществляется по формуле:

где Y- значение в абсолютных
(физических) единицах,б- базисное значение (также в абсолютных единицах);
у - значение в относительных
единицах.
Принимаем следующие основные
базисные величины силовой части электропривода:
Базисное напряжение:= ЕяN = 213,9 В
Базисный ток:б =IяN = 192 А
Базисную скорость:
 =
=  = 59,14 рад/с
= 59,14 рад/с
Базисный момент:
Мб =МN =774,3 Нм
Базисный магнитный поток:
Фб =ФN = 3,62 Вб
Базисный ток и базисное напряжение
регулирующей части электропривода выбираются так, чтобы они были соизмеримы с
реальными уровнями токов и напряжений в регулирующей части.
В проекте принимаем:
Базисное напряжение системы
регулирования:p = 10 В;
Базисный ток системы
регулирования:бр = 0,5 мА.
Рассчитаем производные базисные
величины:
базисное сопротивление для силовых
цепей:
 Ом
Ом
базисное сопротивление для системы
регулирования:
 Ом
Ом
Механическая постоянная времени
электропривода зависит от суммарного момента инерции и принятых базисных
значений скорости и момента:
 с
с
.3 Расчет параметров силовой части
электропривода в относительных единицах
На рис.9 показана структурная схема
модели силовой части электропривода как объект управления. Переменные модели
выражены в относительных единицах. В модель входят следующие звенья:
тиристорный преобразователь (ТП) -
пропорциональное звено с коэффициентом передачи kп
главная цепь (ГЦ) - апериодическое
звено с электромагнитной постоянной времени Тэ и коэффициентом
передачи, равным rэ-1 т.е.
эквивалентной проводимости главной цепи в относительных единицах;
механическая часть (МЧ)-
интегрирующее звено с механической постоянной времени Тj,
звенья умножения на магнитный поток  (поток
рассматривается в модели как постоянный параметр).
(поток
рассматривается в модели как постоянный параметр).
Входные величины модели представляют
собой управляющее воздействие иу (сигнал управления на входе преобразователя) и
возмущающие воздействие тc (момент статического сопротивления на валу
двигателя). Переменными модели являются:
· ЭДС преобразователя ed;
· ЭДС якоря двигателя ея;
· ток якоря двигателя iя;
· электромагнитный момент двигателя m;
· угловая скорость двигателя со.

Рисунок 9. Структурная схема объекта управления
Определим параметры электропривода в
относительных единицах:
коэффициент передачи преобразователя:
эквивалентное сопротивление главной
цепи:
 Ом
Ом
сопротивление цепи якоря двигателя:
 Ом
Ом
магнитный поток двигателя:

.4 Расчет коэффициентов передачи
датчиков
Рассчитаем коэффициенты передачи
датчиков в абсолютных единицах так, чтобы при максимальном значении величины,
измеряемой датчиком, напряжение на выходе датчика было равно базисному
напряжению регулирующей части.
Коэффициент передачи датчика тока:
Где Iя(max) -
максимальный ток якоря по перегрузочной способности двигателя. Максимальный ток
определяется по формуле:
 А
А
Коэффициент передачи датчика
напряжения:
Коэффициент передачи датчика
скорости:
Рассчитаем коэффициенты датчиков в
относительных единицах.
Коэффициент передачи датчика тока:
Коэффициент передачи датчика
напряжения:
Коэффициент передачи датчика
скорости:
. РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОМ
.1 Выбор типа системы управления
электроприводом
В методических указаниях
рассматривается типовой вариант курсового проекта, в котором проектируется
аналоговая система управления электроприводом. Система управления строится по
принципу подчиненного регулирования координат.
Рассмотрим функциональную схему
системы управления электроприводом (рис. 10). Система управления
электроприводом представляет собой двухконтурную систему автоматического
регулирования (САР) скорости. Внутренним контуром системы является контур
регулирования тока якоря, внешним и главным контуром - контур регулирования
скорости.
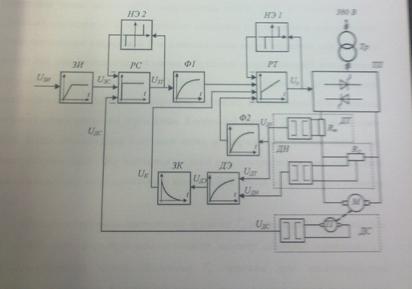
Рисунок 10. Функциональная схема
системы управления, электроприводом
Управляющим воздействием на объект
управления (силовую часть электропривода) является напряжение Управления Uy,
напряжение управления подается на вход системы импульсно-фазового управления
тиристорного преобразователя, которая регулирует угол управления, т.е. фазу
подачи управляющих импульсов на тиристоры.
Нелинейные элементы НЭ1 и НЭ2
предназначены для ограничения координат системы. Элемент НЭ1 ограничивает
выходной сигнал регулятора тока, а следовательно, напряжение управления
преобразователя и его выходную ЭДС. Элемент НЭ2 ограничивает выходной сигнал
регулятора скорости, тем самым ограничивается сигнал задания тока и сам ток
якоря.
.2 Расчет регулирующей части контура
тока якоря
.2.1 Расчет параметров
математической модели контура тока.
Рассмотрим структуру и выполним
расчет параметров модели контура тока, используя систему относительных единиц.
Структурная схема контура тока представлена на puс.11. В контуре тока находятся
звенья регулятора тока (РТ), фильтра (Ф), тиристорного преобразователя (ТП) и
главной цепи (ГЦ). На структурной схеме фильтр показан внутри контура, что
эквивалентно наличию фильтра в цепи задания и обратной связи (см. рис.9). Обратная
связь по току при рассмотрении относительных величин принимается единичной. Па
процессы в контуре тока влияет ЭДС якоря двигателя, которую можно считать
возмущающим воздействием. При отсутствии ЭДС якоря (якорь неподвижен) в контуре
тока можно рассматривать одно звено объекта управления с передаточной функцией:

Рисунок 11 Структурная схема контура
регулирования тока якоря
Некомпенсируемую постоянную времени Т
рекомендуется принять в пределах 0,004 - 0,01с.
При синтезе регулятора тока влияние ЭДС якоря не
учитывается, Передаточная функция регулятора тока находится по условию
настройки контура на модульный оптимум:
Получаем передаточную функцию
ПИ-регулятора. Из этих формул следует, что параметры регулятора тока находятся
по следующим формулам:
Ti1=0,056
Ti2=0,135
Контур регулирования тока при
настройке на модульный оптимум описывается передаточной функцией фильтра
Баттерворта 2-го порядка:
Влияние ЭДС якоря приводит к
появлению статической ошибки по току, что ухудшает качество системы. Для
компенсации данного влияния вводится положительная обратная связь по ЭДС якоря.
Структурная схема контура тока с компенсацией ЭДС представлена на рис. 12. При
выносе фильтра из контура он должен оказаться в цепи задания на ток (Ф1) в цепи
обратной связи по току (Ф2) и в цепи обратной связи по ЭДС, где его удобно
объединить с датчиком ЭДС. Таким образом, датчик ЭДС имеет небольшую
инерционность, что является необходимым, т.к. безынерционный датчик ЭДС
реализовать невозможно.
Рисунок 12. Структурная схема контура тока с
компенсацией ЭДС
Компенсирующий сигнал УК подается на вход
регулятора тока. а не непосредственно в точку действия ЭДС якоря (между
звеньями ТП м ГЦ). Поэтому влияние звеньев регулятора тока преобразователя на
прохождение компенсирующего сигнала необходимо устранить. Это достигается за
счет включения в цепь обратной связи по ЭДС звена компенсации. Передаточная
функция звена компенсации определяется по формуле:
Таким образом, звено компенсации
является реальным дифференцирующим звеном. Параметры компенсации находятся по
следующим формулам:

В результате компенсации ЭДС
статическая ошибка по току устраняется.
ЭДС якоря двигателя недоступна для
прямого измерения. Косвенный датчик ЭДС якоря использует сигналы тока и
напряжения якоря. Связь между током, напряжением и ЭДС якоря следует из
уравнения электрического равновесия для якорной цепи. В области изображений по
Лапласу это уравнение имеет вид:

Реализовать датчик ЭДС в полном
соответствии с формулой невозможно, т.к. требуется идеальное форсирующее звено.
Поэтому внесем в датчик инерционное звено с постоянной времени  . В
результате уравнение датчика ЭДС принимает вид:
. В
результате уравнение датчика ЭДС принимает вид:

В статическом режиме формулы дают
одинаковый результат. Уравнению  соответствует структурная схема
датчика ЭДС, показанная на рис. 13. Также на рис. 13 показано звено
компенсации.
соответствует структурная схема
датчика ЭДС, показанная на рис. 13. Также на рис. 13 показано звено
компенсации.
Рисунок 13. Структурная схема датчика ЭДС и
звена компенсации
В аналоговых системах автоматического управления
электроприводами реализация регуляторов и других преобразователей сигналов
осуществляется на базе операционных усилителей.
Принципиальная схема датчика ЭДС и звена
компенсации тока показана на рис. 13. Фильтр в канале напряжения реализуется на
элементах R12, R13, C6 . Форсирующее звено в
канале тока реализуется на элементах R10, R11, С3.
Операционный усилитель DA 3 предназначен для суммирования сигналов в датчике
ЭДС, что осуществляется путем суммирования токов I1 и I3.
Звено компенсации выполнено на операционном усилителе DA 2, Элементы входной
цепи и цепи обратной связи усилителя DA 2 R8,.R7,С4
обеспечивают реализацию свойств реального дифференцирующего звена.
Рисунок 14. Принципиальная схема датчика ЭДС и
звена компенсации
На рис. 15 представлена структурная схема для
абсолютных величин токов и напряжений, которая соответствует принципиальной
схеме, показанной на рис. 14. При ее составлении было принято, что
сопротивления R12 и R13 одинаковы.

Рис. 15. Структурная схема датчика ЭДС и звена
компенсации для абсолютных величин
От структурной схемы для абсолютных величин
перейдем к структурной схеме для относительных величин (рис. 16).
Рисунок 16. Структурная схема датчика ЭДС
компенсации для относительных величин
На данной схеме показаны относительные
коэффициенты датчиков напряжения и тока. При переходе от абсолютных величин к
относительным величинам в передаточных функциях входных цепей операционных
усилителей появляется сопротивление Rбр В передаточных функциях цепей обратной
связи операционных усилителей появляются обратные величины 1/Rбp
Сопоставляя структурные схемы, показанные на
рис. 13 и 16, получим соотношения между параметрами математической модели
датчика ЭДС и звена компенсации в относительных единицах и параметрами
элементов принципиальной схемы.
Необходимые коэффициенты передачи обеспечиваются
при выполнении условий:
Требуемые значения постоянных
времени обеспечиваются при выполнении условий:

Из записанных соотношений выразим и
рассчитаем параметры элементов принципиальной схемы (сопротивления и емкости).
силовой конструктивный
автоматизированный электропривод

.2.2 Конструктивный расчет
регулятора тока
На рис. 17 показана принципиальная
схема регулятора тока и его входных цепей. Регулятор тока выполнен на
операционном усилителе DA1.Прдварительное включение в цепь обратной связи DA 1
сопротивления R1 и емкости С1 обеспечивает пропорционально-интегральный тип
регулятора.
На входе усилителя DA 1 суммируются
три сигнала приходящие по каналам задания на ток, обратной связи по току и по
каналу компенсации ЭДС, путем суммирования токов I1 I2 и 13. В цепи задания на
ток и в цепи Обратной связи по току установлены фильтры на элементах R2.R3.C2 и
R4.R5 и С3 соответственно. Нелинейный элемент НЭ1 реализуется на стабилизаторах
VD1 и VD 2.
На рис. 18. представлена структурная
схема для абсолютных величин токов и напряжений, которая соответствует
принципиальной схеме, показанной на рис.17. При составлении структурной схемы
предполагалось, что сопротивления R2 и R3 а также R4 и R5 одинаковы. От
структурной схемы для абсолютных величин перейдем к структурной схеме для
относительных величин (рис. 19)

Рисунок 17. Принципиальная схема регулятора тока
и его входных цепей.

Рисунок 18. Структурная схема регулятора тока и
его входных цепей для абсолютных величин
Составляя структурные схемы (см. рис. 12 и 19),
получим, между параметрами математической модели регулирующей части контура
тока в относительных единицах и параметрами принципиальной схемы.

Рис. 19. Структурная схема регулятора тока и его
входных цепей для относительных величин
Для обеспечения единичных коэффициентов передачи
в каналах задания тока обратной связи по току и компенсации ЭДС должны
выполняться условия:

Требуемые значения постоянных
времени обеспечиваются при выполнении условий:
Из записанных соотношений выразим и
рассчитаем параметры элементов принципиальной схемы (сопротивления и емкости).
.3 Расчет регулирующей части контура скорости
.3.1 Расчет параметров математической модели
контура скорости
Однократная система автоматического
регулирования скорости: анализ его свойств, методика синтеза регулятора скорости
подробно рассмотрено в учебном пособии (5).
Рассмотрим структуру и выполним расчет
параметров модели контура скорости, используя систему относительных единиц.
Структурная схема контура регулирования скорости представлена на рис.20. Контур
регулирования тока якоря при его настройке на модульный оптимум рассматриваем
как одно звено с передаточной функцией (5). Контур скорости включает в себя
звено регулятора скорости (РС), звено контура тока якоря (КТ), звено умножения
на поток и звено механической части привода. Обратная связь по скорость при
рассмотрении оптимальных величин принимаем единичной. На объект управления
действует возмущающие воздействие - момент статического сопротивления,
создаваемый нагрузкой на валу двигателя.
При синтезе регулятора скорости считаем, что
момент статического сопротивления равен нулю (режим идеального холостого хода
двигателя).

Рисунок. 20 Структурная схема контура
регулирования скорости
При условии mc = 0 объект управления
в контуре скорости

Передаточная функция регулятора
скорости находится по условию настройки контура на модульный оптимум:

Получаем передаточную функцию
П-регулятора. Коэффициент передачи регулятора скорости согласно (14)-(15)
находится по формуле:
Однократная САР скорости является
статической по возмущающему воздействию, поэтому в результате появления
нагрузки на валу двигателя появляется статическая ошибка по скорости. Определим
величину максимальной статической ошибки по скорости:

где mc -
максимальный по модулю статический момент на валу двигателя в относительных
единицах (см. нагрузочную диаграмму двигателя).

.3.2 Конструктивный расчет
регулирующей части контура скорости
Принципиальная схема регулирующей
части контура скорости представлена на рис.21. Регулятор скорости выполнен на
операционном усилителе DA 4. Суммирование сигнала задания на скорость и сигнала
обратной связи по скорости осуществляется путем суммирования токов I1
и I2. Включение в цепь обратной связи усилителя DA 4 сопротивления R16
обеспечивает пропорциональный тип регулятора. Стабилитроны VD
3, VD 4 регулируют
нелинейный элемент НЭ2.
Рисунок 21. Принципиальная схема регулирующей
части контура скорости
На рис. 22 показана структурная схема для
абсолютных величин токов и напряжений, соответствующая принципиальная схема на
рис. 21.
Рисунок 22. Структурная схема регулирующей части
контура скорости для абсолютных величин
От структурной схемы для абсолютных величин
перейдем к структурной схеме для относительных величин (рис. 23).
Рисунок 23. Структурная схема регулирующей части
контура скорости для относительных единиц
Сопоставляя структурные схемы (20 и 23), получим
соотношения между параметрами математической модели регулирующей части контура скорости
в относительных единицах и параметрами элементов принципиальной схемы.
Для обеспечения единичных коэффициентов передачи
в каналах задания скорости и обратной связи по скорости должны выполняться
условия:

Для обеспечения требуемого
коэффициента передачи регулятора скорости должно выполняться условие:

Из записанных соотношений выразим и
рассчитаем сопротивления R14, R15 и R16.

.4 Расчет задатчика интенсивности
.4.1 Расчет параметров
математической модели задатчика интенсивности
Задатчик интенсивности предназначен
для формирования линейно изменяющегося во времени сигнала задания на скорость с
определенным темпом. Структурная схема задатчика представлена на рис.24. Темп
изменения выходного сигнала задатчика определяется уровнем ограничения Q
нелинейного элемента (НЭ) и постоянной времени  и интегратора (И).
и интегратора (И).
Рис. 24. Структурная схема задатчика
интенсивности
Определим параметры математической модели
задатчика интенсивности в относительных единицах.
Темп задатчика:
Уровень ограничения нелинейного
элемента (принимается): Q = 0,9
Постоянная времени интегрирующего
звена ЗИ:
Коэффициент передачи в линейного
зоне нелинейного элемента (принимается): Кл=100
.4.2 Конструктивный расчет задатчика
интенсивности
Принципиальная схема задатчика
интенсивности представлена на рис. 25. Нелинейный элемент реализуется на
операционном усилителе DA 7.
Ограничение выходного сигнала
обеспечивается за счет включения в цепь обратной связи усилителя DA 7,
стабилитронов VD 5 и VD 6.
Интегратор базируется на операционном усилителе DA 6. Емкость C7 в цепи в
обратной связи операционного усилителя DA 6
определяет постоянную времени интегратора. Усилитель DA 5
предназначен для инвертирования сигнала, чтобы обеспечить отрицательную
обратную связь, охватывающую нелинейный момент и интегратор (рис.24).
Рис 25. Принципиальная схема задатчика
интенсивности
На рис. 26 показана структурная схема для
абсолютных величин токов опережений, соответствующая принципиальной схеме на
рис. 25.

Рисунок 26. Структурная схема задатчика
интенсивности для абсолютных величин
От структурной схемы задатчика интенсивности для
абсолютных величин перейдем к структурной схеме для относительных величин (рис.
27).
Рисунок 27. Структурная схема задатчика
интенсивности для относительных величин

Для обеспечения требуемого
коэффициента передачи в линейной зоне нелинейного элемента должно выполняться
условие:

Остальные сопротивления в схеме
задатчика должны быть таковы, чтобы обеспечить единичные коэффициенты передачи.
Для этого должно выполняться следующие условие:
7. ОСНОВЫ ТЕОРИИ СИСТЕМ ПОДЧИНЕННОГО
РЕГУЛИРОВАНИЯ
Современные системы управления электроприводами
строятся в большинстве случаев в виде многоконтурных систем подчиненного
регулирования.
Рассмотрим теоретические положения, лежащие в
основе синтеза структур, методов расчета и анализа свойств таких систем.
7.1 Обобщенная схема многоконтурной системы
подчиненного регулирования
В основе построения систем подчиненного
регулирования (СПР) лежит определенное структурное представление объекта регулирования,
т.е. силовой части электропривода. Обобщенная структурная схема многоконтурной
СПР представлена на рис. 2.1.
Регулирующая часть| Силовая часть
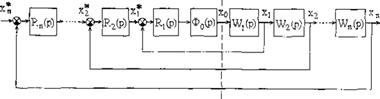
Рис. 2.1 Обобщенная структурная схема
многоконтурной системы подчиненного регулирования
Объект регулирования представлен в виде цепи
последовательно соединенных звеньев направленного действия, передаточные
функции которых обозначены как
 i=1,……n
i=1,……n
где n -
количество звеньев модели объекта.
Разбиение модели объекта на звенья
производится с таким расчетом, чтобы выходными величинами звеньев X1, ... Хn оказались
физические величины, представляющие интерес с точки зрения регулирования и
контроля (ток якоря, скорость вращения двигателя, угол поворота вала и т.д.).
Регулирующая часть системы
починенного регулирования строится следующим образом.
1. На входе
объекта регулирования (или же на выходе регулирующей части) устанавливается
фильтр, ограничивающий полосу пропускания системы и обеспечивающий ее
помехозащищенность. Передаточная функция этого фильтра обычно представляется в
виде:

Где - называется базовой или некомпенсируемой
постоянной времени системы подчиненного регулирования.
2. Для каждой из регулируемых величин X1,...Xn
предусматривается
замкнутая САР с регулированием по отклонению. Каждая САР снабжена
индивидуальным регулятором, передаточная функция которого обозначается как
Таким образом, количество
регуляторов СПР равно количеству регулируемых величин объекта.
Для формирования сигнала обратной
связи в каждой из САР предусматривается датчик соответствующей регулируемой
величины, передаточную функцию которого обозначим как 
В первом рассмотрении примем  =1, т.е.
будем рассматривать систему с идеализированными датчиками, обеспечивающими
безынерционные единичные обратные связи. Вопросы учета не идеальности датчиков
будут служить предметом отдельного анализа, развивающего исходные
принципиальные положения теории построения СПР.
=1, т.е.
будем рассматривать систему с идеализированными датчиками, обеспечивающими
безынерционные единичные обратные связи. Вопросы учета не идеальности датчиков
будут служить предметом отдельного анализа, развивающего исходные
принципиальные положения теории построения СПР.
3. Подобно звеньям объекта регуляторы
соединяются между собой последовательно, но в обратном порядке по отношению к
порядку связи звеньев объекта. Сигналы задания для каждой из регулируемых
величин Х1...,Xn
обозначены соответственно X1*……Xn*.
Каждый последующий (по мере возрастания номера) регулятор вырабатывает задание
для предыдущего регулятора. Так как в структуре САР можно выделить ряд
последовательно вложенных друг в друга контуров, то общее название этих систем
- многоконтурныс системы подчиненного регулирования .
Вследствие последовательной подчиненности
регуляторов и образуемых с их помощью локальных САР регулируемые величины не
равноценны между собой. Основной (главной) из них является величина х„,
процессу регулирования которой подчиняются процессы регулирования всех
остальных величин.
.2 Синтез регуляторов
Задача синтеза заключается в определении
структуры и параметров контурных регуляторов. Синтез осуществляется по так
называемой стандартной методике и заключается в следующем.
1) Синтез регуляторов производится
последовательно, начиная с регулятора внутреннего контура (т.е. регулятора
величины X1). После этого синтезируются регуляторы промежуточных
контуров и, наконец, регулятор внешнего контура (регулятор величины Xn).
2) Каждый контурный регулятор выполняется в виде
последовательного корректирующего устройства, обеспечивающего желаемые свойства
данной локальной системы регулирования. Регулятор строится с таким расчетом,
чтобы своим действием он:) компенсировал действие (и прежде всего,
проявление инерционности ) звена объекта, попадающего в данный контур ;
b) обеспечивал астатизм системы по
управляющему воздействию (т, е. равенство нулю установившейся ошибки САР при
определенном типе управляющего воздействия).
c) обеспечивал оптимизацию процессов регулирования
по выбранному критерию.
Рассмотрим более конкретно методику синтеза
регуляторов и свойства контуров системы подчиненного регулирования.
7.2.1 Синтез регулятора первого контура и его
свойства
Основой синтеза регулятора является расчетная
схема САР величины X], изображенная на рис. 2.2.
Регулятор Фильтр Звено объекта
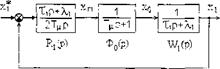
Рис. 2.2 Расчетная схема системы регулирования
величины X1
Здесь показана замкнутая система с
регулированием по отклонению, элементами которой являются регулятор , фильтр и
звено объекта. Передаточные функции этих элементов обозначаются соответственно
как R1(p),
Ф0(р) и W1(p).
Датчик регулируемой величины X1
обеспечивает единичную обратную связь замкнутой САР.
В задаче синтеза регулятора заданной частью
системы являются фильтр и звено объекта с передаточными функциями вида:
где Тμ - нскомпенсируемая
постоянная времени, выбираемая исходя из требуемого быстродействия и
помехоустойчивости системы регулирования;
Т1p
- параметры звена объекта, попадающего в первый контур регулирования.
Последняя формула описывает при основных типа
звеньев объекта регулирования.
Если τ1>0
и λ1=0
то звено является апериодическим. В этом случае параметры звена объекта
определяются как
λ1-1
- коэффициент усиления
τ1
λ1-1
- постоянная времени

.
Если τ1>0, λ1=0, то  т.е звено
является интегрирующим
т.е звено
является интегрирующим
Если τ1=0, λ1>0, то  т.е звено
является усилительным
т.е звено
является усилительным
К числу элементов САР с известными
параметрами отнесем также датчик регулируемой величины. Напомним, что нами
принято Di(p) = 1, т.е.
рассматривается система с безынерционной единичной обратной связью по величине
X1.
Структура и параметры регулятора
величины X1 выбираются исходя из решения трех перечисленных выше
основных задач.
Для решения первой задачи
(компенсации действия звена объекта методом последовательной коррекции) в
структуру регулятора вводится звено, передаточная функция которого обратна по
отношению к передаточной функции компенсируемого звена:
RK1(p)
= [W1(p)]-1
Для решения второй задачи (обеспечения
аетатизма) в структуру регулятора последовательно вводится интегрирующее звено:
Ru1(p)
=
В соответствии с изложенными принципами общий
вид передаточной функции регулятора определяется формулой:
R1(p) = [W1(p)]-1
Итак, в структурном отношении регулятор состоит
из двух частей: компенсирующей и интегрирующей.
Следующий этап синтеза регулятора заключается в
определении его параметров, оптимизирующих процессы регулирования по некоторому
критерию. Параметры компенсирующей части регулятора полностью определяются
параметрами объекта. Поэтому единственным варьируемым параметром регулятора,
который может быть использован для оптимизации процесса, является постоянная
времени его интегрирующего звена Т1. Эту величину удобно выражать в
долях от некомпенсируемой постоянной времени Tμ,
используя коэффициент α1
Т1 = α1
Tμ
На рис. 2.3. показаны реакции САР на ступенчатое
задающее воздействие при различных соотношениях постоянной времени
интегрирующего звена регулятора и некомпенсируемой постоянной времени. При
выборе коэффициента α1
<<l т.е. при Т1
<<Tμ
реакция системы на типовое задающее воздействие протекает относительно быстро,
но имеет сильно колебательный характер (кривая 1). При выборе α1>>1
, т.е. Т1 >>Tμ
переходный процесс протекает гораздо медленнее и носит апериодический характер
(кривая 3). Оптимальным вариантом настройки регулятора считается такой, при
котором α1
=2 , то есть Т1= Tμ,
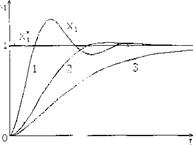
Рис. 2.3 Реакции САР на ступенчатое задающее
воздействие при различных вариантах настройки регулятора
Этот вариант настройки регулятора по существу
является компромиссным, удачно сочетающим достаточно высокую скорость протекания
процесса с одной стороны и небольшое перерегулирование с другой (кривая 2 рис.
2..4). Такой вариант настройки системы носит специальное название; настройка
на технический или модульный оптимум. Рассмотрим подробнее основные
свойства системы, настроенной на модульный оптимум. С этой целью проведем
эксперимент, схема которого изображена на рис. 2.4.
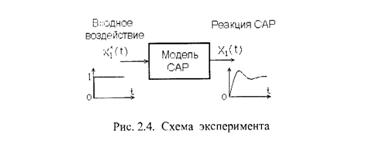
Математически эксперимент описывается следующим
образом. Пусть входной сигнал представляет собой единичную ступенчатую функцию
времени: X1*(t)
=1(t)
Тогда при нулевых начальных условиях реакция САР
описывается следующим выражением:

График переходного процесса, характеризующего
реакцию САР на скачок управляющего воздействия, изображен на рис. 2.5.
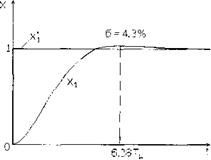
Рис. 2.5 График переходного процесса при
настройке первой САР на модульный оптимум
Основные показатели переходного процесса при
настройке системы на модульный оптимум следующие:
· время первого согласования 4.7T
μ
· время достижения максимума6. 28 T
μ
· время достижения зоны 5% 4.1 T
μ
· отклонения время достижения зоны 1%8
T μ
· отклонения перерегулирование 4.3 T
μ
На практике эти показатели служат определенным
стандартом, которому должна удовлетворять оптимально настроенная система.
Таким образом, оптимальная настройка регулятора
обеспечивает переходный процесс с незначительным перерегулированием σ
= 4.3% и реальной длительностью отработки задания (оцениваемой по времени
достижения максимума) порядка 6.28 T
μ.
Отсюда следует важный вывод о том, что благодаря
компенсирующему действию регулятора быстродействие системы не зависит от
параметров объекта регулирования и полностью определяется выбранной величиной
базовой (некомпенсируемой) постоянной времени T
μ. Поэтому величина T
μ может быть
использована в качестве инструмента для достижения необходимого быстродействия
САР при сохранении стандартного перерегулирования.
Для синтеза последующих регуляторов необходимо
определение передаточной функции замкнутой системы регулирования величины как
элемента, подчиненного следующему регулятору. Сначала найдем передаточную
функцию разомкнутой системы:

В итоге получаем выражение, характеризующее
стандартную передаточную функцию разомкнутой системы, настроенной на модульный
оптимум:

Пользуясь известной из теории автоматического
регулирования [5] формулой замыкания системы единичной отрицательной обратной
связью найдем передаточную функцию замкнутой системы, настроенной на модульный
оптимум:
Это выражение можно представить в так называемой
канонической форме
Она характеризует рассмотренную САР,
как оптимально демпфированную систему второго порядка с постоянной времени Θ1 =  и
коэффициентом демпфирования
и
коэффициентом демпфирования 
8. СИСТЕМЫ РЕГУЛИРОВАНИЯ ТОКА ЯКОРЯ
.1 Функциональная схема САР тока якоря
В структуре многоконтурной системы подчиненного
регулирования система регулирования тока якоря является внутренней САР,
непосредственно воздействующей на силовую часть электропривода как объект
регулирования.
Рассмотрим сначала простейшую систему
регулирования тока якоря двигателя, функциональная схема которой приведена на
рис. 3.1.
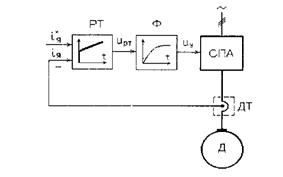
Рис. 3.1 Функциональная схема САР тока якоря
Здесь приняты следующие условные обозначения
основных элементов системы:
РТ - регулятор тока якоря;
Ф - фильтр, ограничивающий полосу пропускания
САР;
СПА - силовой преобразовательный агрегат;
ДТ - датчик тока якоря;
Д - двигатель постоянного тока независимого
возбуждения.
Условные обозначения сигналов:
iя*
- заданный ток якоря:
ia
-
фактический гок якоря;
uy
- управляющее воздействие на входе СПА .
.2 Синтез регуляторов тока якоря
Для синтеза регулятора воспользуемся
математической моделью системы регулирования тока якоря, изображенной на рис.
3.2.

Типовая методика синтеза ориентирована на
трехзвенную структуру прямого тракта САР. Поэтому для данной системы звено
объекта имеет следующую передаточную функцию по управлению:

Особенность звена объекта состоит в том, что оно
подвержено действию не только прямой связи
с регулятором тока, но и внутренней обратной связи объекта по ЭДС якоря
двигателя. Иными словами, структура объекта в данном случае не полностью
соответствует идеализированной структурной схеме рис. 2.1. В первом приближении
пренебрежем влиянием внутренней обратной связи по ЭДС. Кроме того, будем
считать, что в цепи обратной связи но току используется безынерционный датчик с
коэффициентом передачи Кдт = 1.
Согласно типовой методике передаточная функция
регулятора тока якоря

где Тi=2Тμ,
что соответствует условию настойки САР на модульный оптимум.
В итоге получаем регулятор тока со следующей
передаточной функцией:
Данной передаточной функции соответствует
следующая структурная схема регулятора:

Таким образом, в результате применения
стандартной методики получен регулятор тока ПИ - типа .
Использованная стандартная методика не учитывает
влияния ЭДС двигателя на процессы регулирования тока. Однако в действительности
такое влияние объективно существует, поскольку ток в цепи якоря зависит не
только от ЭДС силового преобразовательного агрегата, но и от противо-ЭДС
двигателя. В структуре математической модели силовой части это влияние
отражается внутренней обратной связью по ЭДС двигателя. Рассмотрим подробнее
вопросы учета внутренней обратной связи по ЭДС при синтезе САР тока якоря.
.3 Анализ свойств САР тока якоря
Предположим сначала, что вал двигателя
заторможен, то есть ω
= 0. Очевидно, что при этом ЭДС якоря двигателя ед = φ.
Пусть на вход САР тока якоря подается ступенчатый сигнал задания
Наблюдение ведется за фактическими значениями
тока iя.
Для
определения реакции САР на данное воздействие найдем сначала передаточную
функцию разомкнутой, а затем замкнутой системы.

Полученные выражения совпадают с выражениями
рассмотренных ранее стандартных передаточных функций первого (внутреннего)
контура обобщенной структурной схемы СПР.
Следовательно, можно утверждать, что реакция САР
тока на внешние воздействия должна соответствовать стандартам, принятым для
первой системы, настроенной на модульный оптимум.
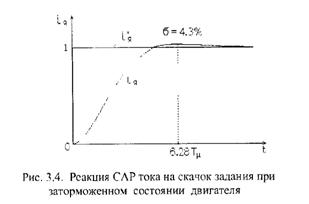
Такой результат мы действительно получим в том
случае, если вал двигателя заторможен. При незаторможенном состоянии двигателя
реакция САР тока на скачок задания вызывает разгон двигателя под действием
развиваемого им электромагнитного момента, который пропорционален току якоря. С
ростом скорости пропорционально увеличивается ЭДС двигателя. Вследствие влияния
ЭДС реакция САР тока будет отличаться от стандартной (кривая 1 рис, 3.5.).
Здесь же для сравнения приведена кривая 2 изменения тока при заторможенном
состоянии двигателя, которая соответствует принятому стандарту.
Анализ реакции системы с учетом влияния ЭДС
показывает, что установившееся значение тока якоря определяется формулой [8]:

Из формулы (3.6) видно, что установившееся
значение тока меньше, чем установившееся значение задания. Таким образом,
вследствие влияния ЭДС двигателя система регулирования тока со стандартным
ПИ-регулятором, синтезированным без учета влияния ЭДС, теряет астатизм по
управляющему воздействию.
Данное явление объясняется (см. рис. 3.5)
непрерывным увеличением скорости и соответственно величины противо-ЭДС
незаторможенного двигателя. Ток якоря зависит как от ЭДС преобразователя, так и
от ЭДС двигателя. Поэтому компенсация влияния на ток якоря непрерывно растущей
величины ЭДС двигателя в принципе возможна лишь путем соответствующего
непрерывного увеличения ЭДС преобразователя. Для этого требуется непрерывное
увеличение выходного сигнала регулятора тока. Такое увеличение сигнала
регулятора тока в установившемся режиме в принципе возможно лишь за счет
действия его интегральной части при наличии ненулевой установившейся ошибки на
его входе.
Именно поэтому, несмотря на наличие в структуре
регулятора интегральной компоненты, возникает определенное установившееся
рассогласование между заданным и фактическим значениями тока якоря. Иными
словами, в условиях непрерывного изменения ЭДС двигателя ресурсы интегральной
части регулятора полностью расходуются на поддержание постоянства тока. На
полную ликвидацию установившейся ошибки по току их уже не достаточно.
Установившаяся ошибка САР тока зависит от
соотношения параметров Тм и Tj.
Как следует из формулы (3.6), при одном и том же значении Тм ошибка
будет тем меньше, чем меньше Tj.
Поэтому повышение быстродействия регулятора тока обеспечивает улучшение
точности САР.
При одном и том же значении Tj
ошибка будет тем меньше, чем больше Тм, т.е. чем более инерционна
электромеханическая система, медленнее изменяется во времени скорость и
соответственно ЭДС.
При благоприятном соотношении параметров (при Тм>>
Tj ) переходный
процесс незначительно отличается от стандартного и поэтому типовой
ПИ-регулятор тока оказывается приемлемым.
При неблагоприятных соотношениях параметров
различие процессов регулирования тока при заторможенном и незаторможенном
состояниях двигателя может оказаться недопустимо большим. В этом случае
применяют усовершенствованные САР тока, реализующие принцип комбинированного
регулирования.
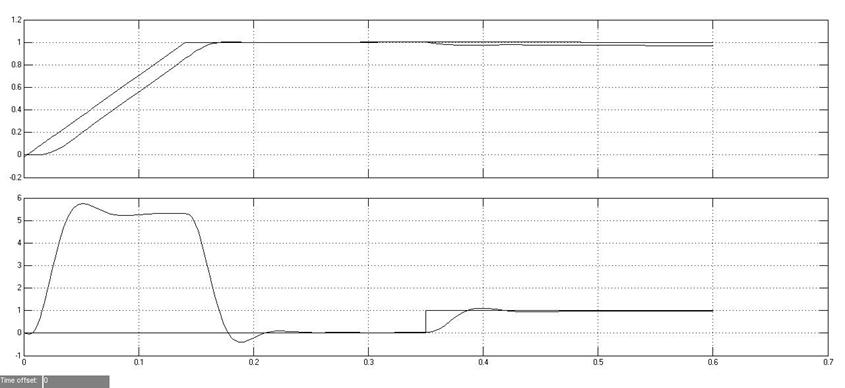





ЗАКЛЮЧЕНИЕ
В данном проекте спроектирован автоматизированный
электропривод главного движения продольно-строгального станка с частотным
управлением. В процессе проектирования был выполнен расчет нагрузок на шкиве,
приведение их к валу двигателя, на основе чего выбран двигатель. выбранный
двигатель проверен по нагреву и перегрузке. Рассчитана нагрузочная диаграмма
механизма и двигателя. Выполнен выбор и расчет параметров силовой части
электропривода и системы управления силовым преобразователем частоты.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
Основная
1. Шрейнер
Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах
частотного управления. Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008.
361 с.
2. Поляков
В.Н., Шрейнер Р.Т. Энергоэффективные режимы регулируемых электроприводов
переменного тока: монография. Екатеринбург: ФГАОУ ВПО «Уральский федеральный
университет имени первого Президента России Б.Н. Ельцина», ФГАОУ ВПО
«Российский государственный профессионально-педагогический университет», 2012,
222 с.
. Шрейнер
Р.Т. Электроприводы переменного тока на базе непосредственных преобразователей
частоты с ШИМ: монография. Екатеринбург: ФГАОУ ВПО «Российский государственный
профессионально-педагогический университет», 2012, 223 с.
. Шрейнер
Р.Т. Ситемы подчиненного регулирования электроприводов: Учеб. пособие: Изд-во
ГОУ ВПО «Ро. Гос. Проф.-пед. ун-т», 2008. 279 с.
5. Емельянов
А.А., Клишин А.В., Медведев А.В. Математическая модель АД в неподвижной системе
координат с переменными  [Текст] /
Молодой ученый. - 2010. -№4. - С. 8-24.
[Текст] /
Молодой ученый. - 2010. -№4. - С. 8-24.
. Емельянов
А.А., Медведев А.В., Кобзев А.В. Математическая модель асинхронного двигателя
во вращающейся системе координат с переменными  [Текст] / Молодой ученый. - 2011.
-№5. - С. 7-15.
[Текст] / Молодой ученый. - 2011.
-№5. - С. 7-15.
Дополнительная
7. Шрейнер
Р.Т. Математическое моделирование электроприводов переменного тока с
полупроводниковыми преобразователями частоты. Екатеринбург: УРО РАН, 2000. 654
с.
8. Справочник
по автоматизированному электроприводу / Под ред. В.А Елисеева, А.В. Шинянского.
- М.: Энергоатомиздат, 1983.
. Соколовский
Г.Г. Электроприводы переменного тока с частотным регулированием: учеб. пособие
для студ. высш. учеб. заведений
. Г.Г.
Соколовский. - М.: Издательский центр «Академия», 2006. - 272 с.