Проектирование электропривода мощного насоса
Введение
Целью данного курсового проекта является
проектирование электропривода (ЭП) механизма основного и резервного
центробежных водяных насосов.
Отличительной чертой насосов является их широкая
распространённость в народном хозяйстве. Прежде всего насосы используются в
системах водоснабжения - коммунального и промышленного, в ирригационных
системах (оросительных и осушительных). Важное место в энергетическом балансе
страны занимают насосы тепловых электрических станций и судовых установок.
Общая мощность этой группы насосов составляет до 6% от мощности основных
агрегатов. Ответственную роль играют насосы в атомной энергетике. Большое
значение имеют насосы в химической, нефтеперерабатывающей промышленности и в
системах дальнего транспортирования нефтепродуктов. Особенно крупные насосные
агрегаты используются в системах гидроаккумулирования и обслуживания каналов.
Насосы являются одним из наиболее
распространенных родов машин, причем их конструктивное разнообразие
исключительно велико. Наиболее правильно в настоящее время определить насос как
машину для преобразования механической энергии двигателя в энергию
перекачиваемой жидкости. Среди насосов наибольшее распространение получили
осевые и центробежные насосы.
Электроприводы турбомеханизмов в целом (осевые и
центробежные компрессоры, насосы и вентиляторы) потребляют не менее 20-25% всей
вырабатываемой электроэнергии и в большинстве случаев остаются нерегулируемыми,
что не позволяет получить режим рационального энергопотребления и расхода газа,
пара, воды и т.д. при изменении технологических потребностей в широких
пределах. Силовое оборудование выбирается на максимальную производительность,
тогда как действительная среднесуточная загруженность может составлять 50% от
номинальной. Значительное снижение момента нагрузки при уменьшении скорости
вращения приводного двигателя, характерное для рассматриваемых механизмов,
позволяет получить существенную экономию электроэнергии при использовании
регулируемого электропривода. Кроме того, поддержание в системе минимально
необходимого давления приводит к существенному уменьшению непроизводительных
расходов транспортируемого продукта и снижению аварийности гидравлических и
пневматических сетей.
Поэтому внедрение регулируемого электропривода,
особенно для мощных турбомеханизмов, должно являться одной из первостепенных
задач в области промышленности и энергетики.
1.
Выбор
оптимальной системы электропривода
Рассмотрим основные типы регулирования
производительности насосов и системы электропривода получившие наибольшее распространение
при создании регулируемого электропривода таких механизмов.
Под методами регулирования насосов понимают
совокупность приемов изменения характеристики системы насос-сеть с целью
обеспечения заданных параметров используемого потребителем жидкости при
изменении условий работы системы или в соответствии с требованиями
технологического процесса. Причем эффективное решение вопросов регулирования в
значительной степени определяет экономические показатели оборудования насосов,
так как в среднем этот класс машин более половины времени работает на
нерасчётных режимах.
Методы регулирования насосов можно разделить на
две группы:
) регулирование изменением характеристики
системы, например путем дросселирования;
) регулирование путем изменения характеристики
насоса, например путем изменения частоты вращения, изменением формы и размеров
проточной части, путем частичного отбора жидкости из промежуточной системы и т.
п.
Выбор метода регулирования при разработке насоса
определяется многими факторами, основные из которых следующие: необходимая
глубина регулирования, характеристика сети, особенности привода насоса, время
работы на нерасчетных режимах, эффективность метода регулирования, стоимость
системы, особенности условий эксплуатации.
Дроссельное регулирование - это наиболее простой
и надёжный, но наименее экономичный метод регулирования, который сводится к
постановке перед насосом или присоединению к сети за насосом дополнительного
сопротивления (дросселей, задвижек), величину которого можно изменять. При этом
КПД данного способа снижается пропорционально квадрату диапазона регулирования
подачи [3].
Регулирование изменением проточной части насоса
содержит в своей основе использование двух факторов:
) возможности изменения напора ступени при
заданной производительности путем изменения окружных составляющих скоростей на
входе и выходе рабочих элементов;
) возможности снижения газодинамических потерь в
лопаточных аппаратах и других элементах при работе насоса на нерасчетных
режимах путем поддержания оптимальных углов натекания потока на входе в эти
элементы.
Регулирование поворотом направляющих лопаток
осевых насосов или применением специальных радиальных входных регулируемых
аппаратов в центробежных насосах получило в настоящее время достаточно широкое
распространение. Возможны и другие способы изменения геометрии проточной части
(поворот лопаток диффузора, изменение ширины безлопаточного участка перед
диффузором и др.), однако из-за конструктивной сложности их применение в
настоящее время ограничено.
Наибольший экономический эффект в большинстве
случаев дает регулирование насоса путем изменения частоты вращения приводного
двигателя. При этом в качестве двигателей используются в основном надежные и
дешевые асинхронные электродвигатели с короткозамкнутым ротором и только при
мощностях свыше 200 кВт в ряде случаев возможно применение синхронных
электродвигателей. Электроприводы постоянного тока используют редко, в основном
в испытательных установках.
Применение мощных синхронных электродвигателей
оправдано для нерегулируемого электропривода. В этом случае используется
возможность работы электродвигателя в режиме синхронного компенсатора
реактивной энергии. В случае регулируемого электропривода синхронные
электродвигатели требуют наличия системы регулирования тока возбуждения ротора
и также как и асинхронные привода комплектуются преобразователями частоты.
Частотное регулирование асинхронного
электродвигателя является наиболее выгодным и экономичным способом управления.
При этом возможно применение двух типов преобразователей частоты:
преобразователя частоты с непосредственной связью с сетью (НПЧ) и
преобразователя частоты со звеном постоянного тока (инверторного типа).
Невысокие требования к качеству регулирования давления и расхода обусловливают
возможность применения наиболее простых и, следовательно, относительно
недорогих преобразователей частоты, широкий выбор которых имеется на
современном рынке. Преобразователь частоты может быть легко внедрен в уже
существующую систему без сложной реконструкции установки.
Основное преимущество НПЧ - это его более низкая
стоимость по сравнению с ПЧИ. Однако выходная частота НПЧ лежит в диапазоне
5-25 Гц при частоте сети 50 Гц, тогда как ПЧИ позволяет получить частоты до
сетевой и выше. К тому же ПЧИ имеет более благоприятный гармонический состав
выходного напряжения.
В целом применение частотно-регулируемого
электропривода в компрессорных, насосных и вентиляторных установках дает
следующие преимущества:
) экономия электроэнергии (до 50%);
) экономия транспортируемого продукта за счёт
снижения непроизводственных расходов
) снижение аварийности пневматической или
гидравлической сети за счет поддержания минимально необходимого давления;
) снижение аварийности электрической сети и
самого агрегата за счет возможности применения плавного пуска, повышение
надежности электрооборудования;
) снижение уровня шума, создаваемого установкой;
) удобство автоматизации и простота внедрения.
Пониженная частота питания при использовании НПЧ
приводит к необходимости выбора электродвигателя на завышенную приблизительно в
два раза мощность, а также применения повышающего редуктора больших мощностей и
габаритов. В результате стоимость системы снизить не удаётся. Поэтому
применение НПЧ в данном случае является неоправданным.
Таким образом, для решения задач, поставленных в
данном курсовом проекте, необходимо сделать выбор между системами
преобразователь частоты инверторного типа - асинхронный двигатель с
короткозамкнутым ротором (ПЧИ-АДКЗ), преобразователь частоты инверторного типа
- синхронный двигатель (ПЧИ-СД) и АВК.
Рассчитаем мощность на валу электродвигателя
[4]. Для этого введём понятие общей полезной мощности, сообщаемой насосом
подаваемой жидкости:
 ,
,
где ρ - плотность
перекачиваемой жидкости, кг/м3; g - ускорение свободного падения,
м/с2; Q - подача насоса, м3/с.
Не вся мощность, потребляемая
насосом N, передаётся жидкости. В насосе обязательно существуют потери энергии,
которые учитываются коэффициентом полезного действия (КПД) η :
 .
.
Используя эти формулы, определим
мощность насоса N, кВт, необходимую для его привода:
 .
.
Для чистой воды ρ=1000 кг/м3,
g=9.81 м/с2 и формула мощности принимает вид:
Очевидно, что максимальная мощность
на валу будет при максимальном значении подачи жидкости (воды) и максимальном
напоре. Подставляя данные по заданию значения величин, получим:

С учётом возможных скачков
напряжения (по заданию +10%, -15%) примем мощность равной:

Так как асинхронный двигатель с
короткозамкнутым ротором стоит дешевле других типов, им проще управлять, у него
выше надёжность, окончательно выбираем систему ПЧИ-АД.
2. Выбор электродвигателя
Основное условие для выбора электродвигателя -
номинальная мощность должна быть не меньше максимальной рассчитанной (347 кВт),
т.к. продолжительность включения составляет 100%. В этом случае проверки
двигателя по нагреву производить не будем, т.к. при любой мощности нагрузки, не
превышающей максимальную, перегрева двигателя наблюдаться не будет. То есть
выбор двигателя является окончательным.
Выбираем двигатель серии 4АН400М2У3 со
следующими параметрами [5]:
· номинальная мощность 
· номинальное напряжение 
· номинальная частота вращения 
· коэффициент мощности 
· коэффициент полезного действия 
· момент инерции ротора 
· кратность максимального момента 
· кратность пускового момента 
· кратность минимального момента 
· кратность пускового тока 
· номинальное скольжение 
· критическое скольжение 
· класс нагревостойкости 
· номинальный режим работы двигателей 
· исполнение двигателя по степени защиты 
Двигатель рассчитан для работы в режиме S1 от
сети трехфазного переменного тока частотой 50 Гц, напряжением 380/660 В.
Степень защиты электродвигателей IP54,
исполнение по способу монтажа IM1001, класс нагревостойкости изоляции Н.
Рассчитаем необходимые параметры двигателя:
Ø скорость холостого хода:

Ø номинальная угловая скорость:


Ø пусковой момент двигателя:

Ø критический момент двигателя:

Из системы уравнений [6] найдём
значения величин сопротивлений статора, ротора, индуктивных сопротивлений и
критического скольжения:
В номинальном режиме:  ;
; ;
;
При К.З.: 


Перевод в абсолютные величины:




 ,
,
 ,
, 
· сопротивление статора: 
· сопротивление ротора: 
· индуктивные сопротивления статора и ротора:

· критическое скольжение: 
· коэффициент соотношения сопротивлений: 
· мощность двигателя:

· фазный ток статора:

· мощность двигателя при скорости холостого хода  :
:

· номинальный ток ротора:

Принимая значение  равным
единице, будем иметь:
равным
единице, будем иметь:
· ток намагничивания:

· индуктивное сопротивление цепи
намагничивания:

· индуктивность цепи намагничивания:

Пользуясь схемой замещения АД (рис.
2), найдём конечные значения величин сопротивлений статора и ротора:
Рис. 1 Схема замещения асинхронного
двигателя
· индуктивность статора и ротора:

3. Расчёт характеристик насос-сеть
Для расчёта статических характеристик механизма,
приведенных к валу двигателя, необходимо рассчитать зависимость скорости насоса
от давления на его выходе и его производительности.
Зададимся характеристикой насоса, которой он
должен обладать при работе с номинальной скоростью. Характеристику насоса можно
аппроксимировать зависимостью
 (2).
(2).
При регулировании производительности
насоса, давление на его выходе и расход, очевидно, не могут превышать
соответствующие номинальным. От величины A и B зависит максимальная мощность,
которую может развить насоса. Поэтому желательно, с одной стороны взять их как
можно меньше, а с другой стороны они должны такими, чтобы обеспечивалась
нормальная работа насоса при максимальной его загруженности. Для пересчёта
характеристики насоса с номинальной скорости на любую другую используем
следующие зависимости [3]:
Для упрощения расчётов характеристик
и модели в Matlab остановимся на упрощенной модели. Следует отметить, что более
точная модель насоса требует учёта достаточно многих параметров, которые можно
получить только с помощью экспериментов на реальном насосе. Уравнения по такой
модели, учитывающие все особенности насоса, будут иметь очень сложный вид.
Преобразуем вышеприведенные выражения, считая P2=Pе , Q2=Qе
, w2=wе
(естественными).

Таким образом, имея естественную
характеристику насоса (т.е. зная коэффициенты A=1500 и B=250), можно получить
характеристику насоса (зависимость P от Q) при любой заданной скорости w1. (где
Q=0,1…0,4 м3/c)
Следует отметить, что все реальные
характеристики насоса ограничены, как слева, так и справа некоторыми
предельными значениями расходов. При очень больших расходах оказывается
превышена номинальная мощность. Поэтому при моделировании будем предполагать,
что расход воды через насос будет находится в интервале (0,1…0,4) м3/с
(по заданию).
Все реально используемые насосы работают
согласованно с другими насосами на общую сеть. Последнее приводит к тому, что
на выходе насоса уже имеется давление называемое статическим и для облегчения
пуска насоса, а также в целях безопасности на выходе насоса необходима
установка обратного клапана, исключающего протекание жидкости в одну из
составных частей насоса. Так как реальных данных об условиях эксплуатации
насоса и системе водопроводов нет, то зададимся статическим давлением 15 кПа.
Тогда характеристику сети, на которую работает насос можно представить
зависимостью
 (6),
(6),
где KM - коэффициент
сопротивления сети, который зависит от положения задвижек установленных в
водопроводной системе (примем KM =65).
Все расчёты проводились в программе
MathCAD 2000. Результат расчётов представлен на рис. 2. На рис. 2 представлено
семейство характеристик насос-сеть для подач 0.5, 0.4, 0.3, 0.2, 0.1 м3/с
при регулировании изменением скорости вращения приводного электродвигателя.
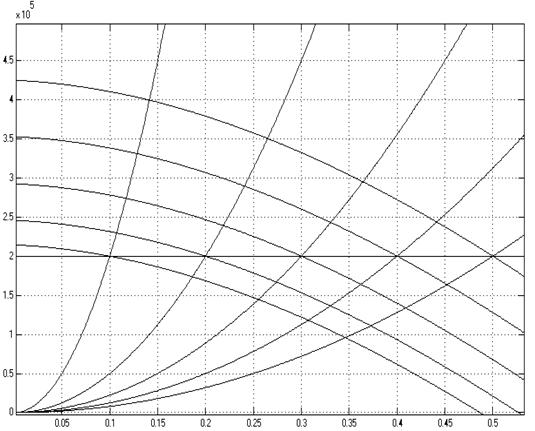
Рис. 2. Семейство характеристик насос-сеть:
-5 - характеристики насоса;
-10 - характеристики сети;
- линия требуемого рабочего режима.
Подача насоса прямо пропорциональна скорости
вращения приводного двигателя:
 .
.
Зная диапазон изменения подачи
насоса, можно рассчитать требуемый диапазон изменения скорости вращения
приводного электродвигателя:
Примем за верхнюю границу диапазона
номинальную скорость вращения двигателя ω=310.08 рад/с. Тогда
ωmin=0.25*310.08=77.52
рад/с.
4. Расчёт статических характеристик
электропривода
Используя выражение (1), получим зависимость
момента сопротивления на валу двигателя в каждой расчётной точке:
 (7)
(7)
Далее, зная момент сопротивления на
валу двигателя, его скорость при этой нагрузке и используя математическую
модель двигателя, найдём скорость холостого хода для каждого расчётного режима,
решив уравнение (9).

В модели двигателя присутствует
фазное напряжение U1. Так как предполагается использовать
регулирование производительности насоса изменением скорости приводного
двигателя посредством изменения частоты и величины питающего напряжения, уже на
этом этапе необходимо определиться с законом частотного регулирования.
В литературе [19] сообщается, что
для двигателей насосов, наиболее рациональным является применение закона
регулирования
 ,
,
что позволяет при низких скоростях
не заботиться о величине критического момента и уменьшить питающее напряжение.
А уменьшение питающего напряжения уменьшает износ изоляции двигателя и потери
электроэнергии. Чтобы осуществить такой закон регулирования, необходима его
поддержка преобразователем частоты. Не все современные преобразователи частоты,
даже предназначенные специально для насосов, поддерживают такой закон
регулирования. Выбранный преобразователь частоты поддерживает только закон
регулирования (рис. 3). Применение такого закона управления означает, что
двигатель будет обладать большой перегрузочной способностью практически во всём
диапазоне регулирования скорости.
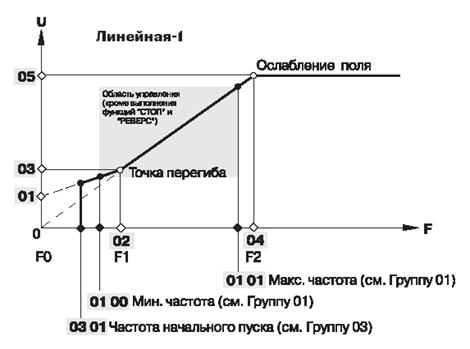
Рис. 3 Программируемые параметры
закона 
Сформируем требования к закону
частотного управления:
- максимальная частота F2=50
Гц. (определяется питающей сетью) - параметр 04, принимаем равным параметру
0101;
- максимальное напряжение (параметр
05) -  В
определяется тем, что питающее напряжение может повышаться на 10% (по заданию);
минимальное (из условия, что напряжение может понижаться на 15%) напряжение
В
определяется тем, что питающее напряжение может повышаться на 10% (по заданию);
минимальное (из условия, что напряжение может понижаться на 15%) напряжение  В;
В;
- значение частоты F1 в
точке перегиба (параметр 02) определяем в соответствии с рекомендациями [9]
(здесь и далее): F1=(0,3…0,4)*f1НОМ. Принимаем F1=0.3·50=15
Гц.
При работе насоса в расчётной точке
1 его скорость близка к максимальной, а частота питающего напряжения - к 50 Гц.
Поэтому при рассчитанном диапазоне регулирования скорости - 4, минимальная
частота будет близка к 50/4=12.5 Гц. Отсюда заключаем, что частота в точке
перегиба (15 Гц) выбрана правильно и в рабочем диапазоне будет поддерживаться
соотношение
 .
.
Теперь можно определить напряжение U1
в формуле (8):
 .
.
После этого становится возможным
решить уравнения (9) и зная MC и ω определить ω0.
Используя программу MathCAD решаем
это уравнение для всех четырёх случаев и строим статические характеристики
двигателя и сети (рис. 4).
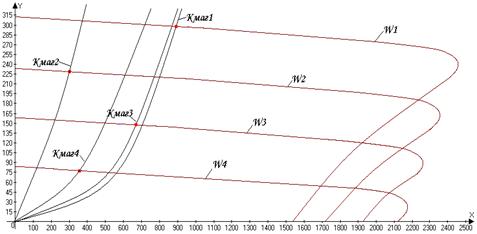
Рис. 4 Статические механические
характеристики двигателя и сети
5. Моделирование процессов
управления в системе
Моделирование будем проводить с
помощью программы Matlab. В основу модели положена классическая одноконтурная
система регулирования давления. Для получения статической точности при
регулировании давления достаточно применение П-регулятора. Однако выбранный
преобразователь частоты, с помощью которого планируется осуществить
регулирование давления, содержит встроенный ПИД-регулятор. Поэтому в данном
случае без каких либо дополнительных аппаратурных затрат возможно применение
ПИ-регулятора, что должно обеспечить астатизм по заданию.
Система электродвигатель-насос
является достаточно сложной и нелинейной, поэтому решить задачу обеспечения
устойчивости аналитически выбором определённых параметров регулятора не
представляется возможным. Поэтому синтезировать регулятор будем проводя
последовательные имитационные эксперименты. Для того чтобы проверить
устойчивость системы и отсутствие автоколебаний, необходимо проверить её работу
как можно в более разнообразных условиях. Для этого будем моделировать
изменение задания во всём возможном диапазоне и изменение расхода (нагрузки).
Изменение нагрузки будем моделировать изменением коэффициента сопротивления
магистрали.
Для того чтобы смоделировать
изменение задания и изменение нагрузки, насос необходимо запустить. Будем
осуществлять “щадящий” вентиляторный пуск. Суть этого метода заключается в том,
что имеется управляемая задвижка, подключённая на выходе насоса. Перед запуском
эта задвижка полностью открыта. Вода из водопроводной сети не выходит, так как
её обратное движение блокируется обратным клапаном. На систему управления
двигателя даётся задание на некоторое малое “вентиляторное” давление. Двигатель
начинает запускаться и через некоторое время выходит на установившийся режим.
Далее, будем считать что в течении
некоторого времени (1.5 сек) закрывается задвижка и одновременно с этим
начинает увеличиваться задание на напор на входе контура регулирования напора.
Как только давление в насосе становится больше статического в сети, открывается
обратный клапан. После завершения переходного процесса будем считать, что насос
вышел на нормальный рабочий режим.
Будем считать, что задвижке
“соответствует” свой коэффициент сопротивления магистрали (принятый ранее KM
=65). При закрытой задвижке значение этого коэффициента будем считать
очень большим, а при открытой значение коэффициента ограничено снизу
максимальной производительностью компрессора (0.4 м3/сек). Схема
модели представлена на рис. 5.
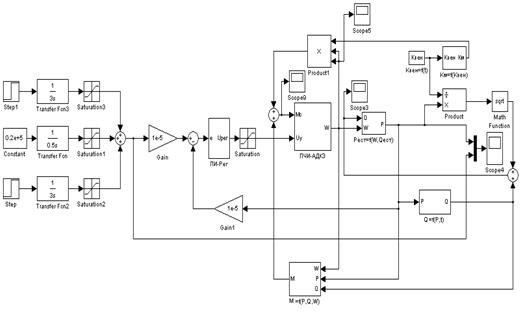
Рис. 5 Схема модели электропривода
насоса
В этой модели (слева) расположены
датчики интенсивности (для ограничения величины токов), на вход которых
поступает сигнал задания.
Далее сигнал задания масштабируется и приводится
к уровню напряжений действующих в системе управления (0-10 В.). На вход
сумматора поступает сигнал обратной связи с датчика давления, приведенный к
уровню напряжений. Далее идёт ПИ-регулятор. Сигнал с выхода ПИ-регулятора
поступает на вход модели преобразователя частоты. С блока преобразователя
частоты выходит сигнал скорости, с помощью которого по уравнениям модели насоса
(приведены в предыдущих разделах) и вентилятора вычисляется общее давление и
составляющие момента сопротивления на валу двигателя.
На следующих рисунках представлены некоторые
(наиболее важные) подсистемы модели.
Рис. 6 Подсистема Q=f(P,t) для расчёта расхода
воды через насос, составленная по формуле (6)
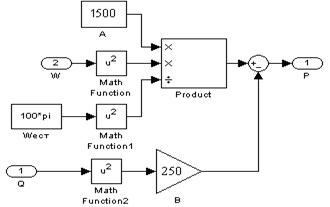
Рис. 7 Подсистема Pест=f(W,Qест)
для расчёта давления на выходе насоса, составленная по формуле (5) (при А=1500
и В=250)

Рис. 8 Подсистема ПЧИ-АДКЗ
Параметры электродвигателя были рассчитаны ранее
в пункте [4] «Выбор электродвигателя». Там же величины были переведены из
относительных в абсолютные, которые и подставлялись в подсистему при
моделировании.
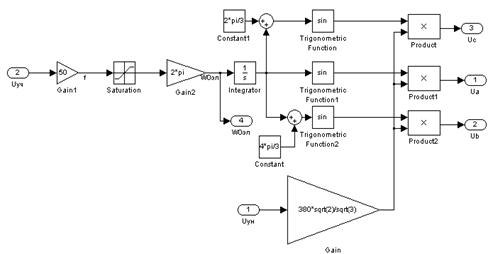
Рис. 9 Подсистема INVERTOR U
Рис. 10 Подсистема Км=f(Квен)
для расчёта момента сопротивления от вентиляторного потока
На рис. 10 представлена подсистема вычисляющая
коэффициент KM с помощью которого можно вычислить момент
сопротивления на валу двигателя. KM зависит только от KВЕН.
Выражение для получения KM можно получить следующим образом:

Далее на рисунках 11-15 представлены
результаты моделирования режимов работы установки в зависимости от изменения
задания во времени.
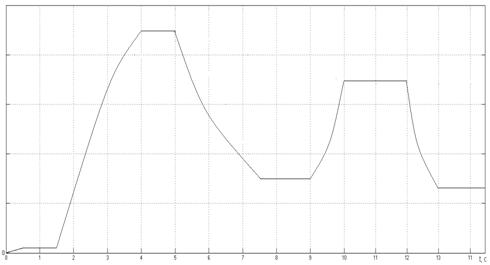
Рис. 11 Изменение момента
сопротивления на валу двигателя от времени

Рис. 12 Давление на выходе насоса в
зависимости от задания (продолжительный режим работы)

Рис. 13 Изменение расхода воды через
насос во времени
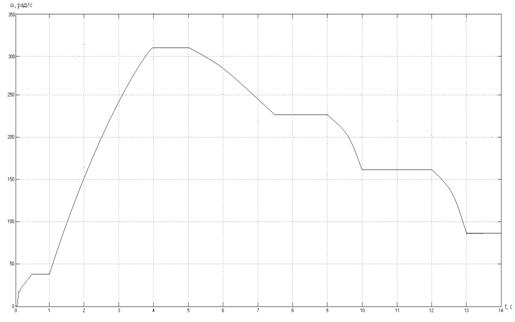
Рис. 14 Изменение скорости двигателя
во времени в зависимости от изменения подачи
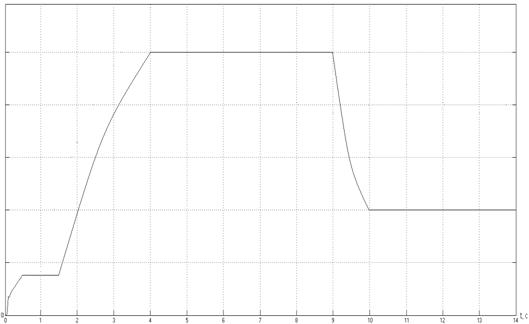
Рис. 15 Изменение задания на напор
6. Разработка электрической схемы
электропривода
.1 Выбор преобразователя частоты
Систему автоматического регулирования давления
осуществим на базе современного интеллектуального преобразователя частоты (ПЧ)
АТ08 отечественной фирмы “Триол”.
Электропривод Триол АТ08 - универсальный
электропривод, предназначенный для автоматического управления частотой вращения
и моментом производственных машин и механизмов с приводными трёхфазными
асинхронными электродвигателями мощностью от 200 кВт до 750 кВт класса
напряжения до 0.4 кВ. Этот электропривод применяется для управления широким
спектром машин, механизмов и технических комплексов с различными режимами
работы и высокими требованиями к статическим и динамическим характеристикам. Электроприводы
АТ08 имеют развитый внешний интерфейс, что позволяет адаптировать их к
существующим системам автоматики, а также создавать на базе электроприводов
АТ08 автоматизированные системы управления различными механизмами. Это возможно
благодаря:
· широким функциональным возможностям
(до 500 программируемых параметров);
· программируемой частоте от 0.4 до 16
кГц;
· встроенному и дистанционному пультам
управления с ЖКИ дисплеем;
· шести программируемым дискретным
входам (10 μА, Rнагр=2
кОм);
· шести программируемым дискретным
(релейным) выходам (250 В, 3 А) и т.д.
В электроприводе Триол АТ08 реализованы
оптимизированные алгоритмы высокочастотного ШИМ-управления, законы частотного
регулирования АД. Это обеспечивает работу АД во всевозможных режимах. Электропривод
Триол АТ08 выгодно отличается от своих аналогов малыми габаритными размерами,
простыми условиями размещения и подключения оборудования на объекте,
надёжностью в эксплуатации, значительно меньшими начальными эксплуатационными
затратами.
Функциональные возможности ПЧ АТ08:
· пуск по заданному алгоритму;
· длительная работа в заданном
диапазоне частот вращения и нагрузок;
· реверс;
· торможение и останов по заданным
алгоритмам;
· регулирование технологического параметра
за счёт встроенного ПИД-регулятора;
· защита ПЧ, АД и механизмов в
аварийных и нештатных режимах;
· дистанционный приём и обработка
сигналов управления, задания параметров и режимов, в том числе по каналу
последовательной связи от управляющих машин и систем высшего уровня;
· сигнализация, отображение и
дистанционная передача информации о параметрах и режимах работы;
· регистрация отказов, нештатных и
аварийных режимов.
Основные параметры и технические характеристики
ПЧ следующие:
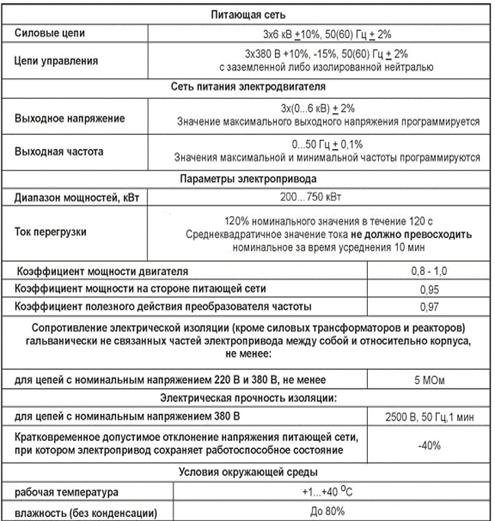
Рис. 16 Габаритно-установочные размеры
электроприводов Триол АТ08
В электроприводе Триол АТ08 реализован ряд
аппаратных и программных защит, что даёт возможность предохранить электропривод
от выхода из строя в аварийных и нештатных ситуациях.
Виды защит:
· от превышения максимального тока
двигателя (от токов недопустимой перегрузки и токов короткого замыкания);
· от недопустимого превышения и
снижения напряжения в звене постоянного тока;
· от межфазного короткого замыкания на
выходе (в обмотках двигателя);
· от пробоя силовых приборов
инвертора;
· от недопустимых отклонений
технологического параметра;
· от недопустимых отклонений и
исчезновения напряжения питающей сети;
· от превышения допустимой
температуры;
· от неисправностей и сбоев системы
управления.
Кроме того, в электроприводе предусмотрены
режимы ограничения минимальной и максимальной мощности, минимальной рабочей
частоты, а также введения запрещённых (резонансных) рабочих частот. Также
предусмотрена возможность ввода дополнительных блокировок с использованием
сигналов существующх у заказчика систем защиты двигателя.
Настройка и просмотр параметров осуществляется с
помощью ЖК-дисплея и клавиатуры на передней панели шкафа системы управления.
Электроприводы Триол АТ08 предусматривают работу
в ручном и автоматическом режимах.
В ручном режиме привод отрабатывает заданное
оператором значение частоты и напряжения и поддерживает соответствующую
скорость двигателя. В автоматическом режиме регулирование частоты вращения электродвигателя
происходит в замкнутой системе. Регулирование осуществляется встроенным
программным ПИД-регулятором по сигналам с датчиков обратной связи.
В особом подрежиме автоматического режима (в
режиме работы по таймеру) регулирование осуществляется на основании
запрограммированных значений интервалов времени и соответствующих им величин
технологического параметра.
Управление может осуществляться с местного
встроенного пульта или с пульта дистанционного управления.
В автоматическом режиме требуемое значение
технологического параметра задаётся:
· потенциометром “задание” системы
управления;
· с помощью клавиатуры пульта
управления;
· с помощью команды по каналу
последовательной связи.
Значение сигнала обратной связи стандартного
типа принимается по соответствующему аналоговому входу.
В ручном режиме задание выходной частоты
производится:
· потенциометром “задание”;
· с помощью клавиатуры пульта
управления;
· с помощью команды по каналу
последовательной связи;
· дистанционно унифицированным
сигналом.
Выбор источника управляющего сигнала
осуществляется путём программирования соответствующих параметров.
Электропривод Триол АТ08 поддерживает обмен
данными с внешними устройствами и с дистанционным пультом управления на
расстоянии до 1000 м. Обмен данными происходит через интерфейс RS485 в
соответствии с протоколом Modbus.
Монтаж (внешние подключения) осуществляется
посредством клеммных зажимов и разъёмных соединений. По функциональному
назначению и электрическим свойствам внешние соединители делятся на 2 группы: клеммные
зажимы для подключения внешних цепей управления, а также клеммные зажимы и
разъёмные соединения для подключения цепей.
Для подключения внешних цепей управления в ПЧ
АТ08 применяются клеммники XT1, XT2, XT3, XT5, XT15 и XT16 (рис. 17).

Рис. 17 Схема подключения внешних цепей
управления к ПЧ АТ08
Для подключения силовых цепей используются
разъёмные (болтовые) соединения:
· XT6 - Сеть A;
· XT7 - Сеть B;
· XT8 - Сеть C;
· XT9 - Нейтраль;
· XT10 - Выход U;
· XT11 - Выход V;
· XT12 - Выход W;
· XT13 - Rd+;
· XT14 - Rd-;
Схема подключения силовых цепей показана на рис.
18
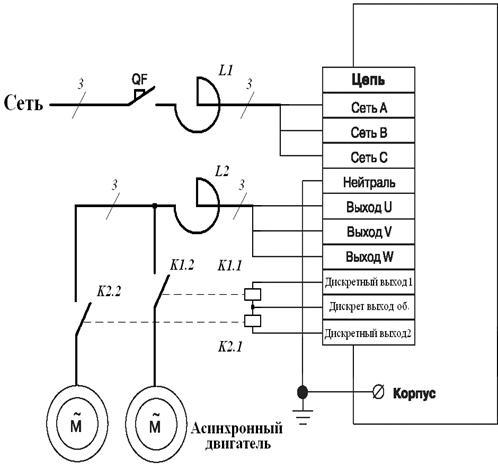
Рис. 18 Схема подключения силовых цепей к ПЧ
Триол АТ08
При реализации системы стабилизации давления
выход с датчика давления будем подключать на аналоговый вход +Р2/-Р2,
запрограммировав его на стандартный сигнал 4-20 мА. В системе будем применять
кнопочный выключатель для аварийного останова типа SPA-101A1 [12]. Для
индикации к дискретному выходу “Электропривод включен” подключим светодиодную
лампу “Пермь LC18x5+12R 110/220В AC/DC” со следующими параметрами:
· рабочее напряжение: Любое АС/DC
85…250;
· потребляемая мощность, не более 8
Вт;
· сила света в горизонтальной
плоскости 360°: не менее 25 кд;
· масса, не более 0,3 кг;
· средний ресурс 100 000 часов;
· габаритные размеры: d60х110 мм;
· цвет свечения: красный;
· температура эксплуатации: -50…+50 С.
Тормозной резистор в данной задаче использовать
не будем, так как режим динамического торможения не требуется.
6.2 Выбор датчиков
Датчики давления Метран-100 предназначены для
работы в системах автоматического контроля, регулирования и управления
технологическими процессами и обеспечивают непрерывное преобразование
измеряемых величин в унифицированный токовый выходной сигнал дистанционной
передачи, цифровой сигнал на базе HART-протокола или сигнал на базе интерфейса
R485.
По климатическим условиям датчики имеют следующие
исполнения по ГОСТ 15150: УХЛ3, У2, Т3, ТС1, УХЛ4.
Датчик состоит из преобразователя давления
(сенсорный блок) и электронного преобразователя. Измеряемая величина подается в
камеру сенсорного блока и преобразуется в деформацию чувствительного элемента
(тензопреобразователя), вызывая при этом изменение электрического сопротивления
его тензорезисторов. Электронный преобразователь преобразует это изменение
сопротивления в токовый выходной сигнал.
Чувствительным элементом тензопреобразователя
является пластина из монокристаллического сапфира с кремниевыми пленочными
тензорезисторами, прочно соединенная с металлической мембраной датчика.
Напряжение питания датчиков 12-42 В,
потребляемая мощность при выходном сигнале 4-20 мА не более 0,8 В*А.
Минимальное сопротивление нагрузки при
напряжении питания не более 36 В составляет 10 Ом.
Выходной сигнал при выборе датчика с линейной
возрастающей характеристикой равен
 ,
,
где Imax - максимальный
выходной ток, Imin - минимальный выходной ток, Pmax, Pmin
- соответственно верхний и нижний пределы измерения, Р - измеряемая величина.
Средний срок службы датчиков - 12 лет, средняя
наработка на отказ - 150000 часов.
Для решения задач измерения давления в
водопроводе в разрабатываемой установке применим взрывозащищенный датчик
избыточного давления Метран-100-Вн-ДГ-1541-02-МП3-t12-015-50кПа-42-М80-С.
Расшифровка условного обозначения:
) метран-100 - тип датчика;
) Вн - взрывозащищенное исполнение вида
«взрывонепроницаемая оболочка»;
) ДГ - датчик гидростатического давления;
) 1541 - модель;
) 02 - код материала датчика;
) МП3 - тип микропроцессорного преобразователя
(с индикаторным устройством с выходным токовым сигналом 4-20 мА с цифровым
сигналом на базе HART-протокола);
) t12 - код климатического исполнения (У4);
) 015 - код предела основной погрешности
(0.15%);
) 50кПа - верхний предел измерения (нижний
предел равен нулю);
) 42 - код выходного сигнала (4-20 мА);
) М80 - код монтажа;
) С - код электрического разъема.
Внешний вид датчика и его габаритные размеры
приведены на рис. 19
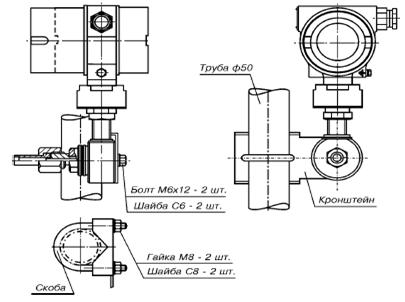
Рис. 19 Датчик давления Метран-100-Вн-ДГ-1153
Схема включения датчика в измерительную цепь
приведена на рис. 19. Под Rн в нашем случае будет подразумеваться
входное сопротивление аналогового входа Р2 преобразователя частоты.

Рис. 20 Схема включения датчика в
измерительную цепь
Для питания датчика необходим
внешний источник питания. Для этой цели применим блок питания
Метран-602-024-120-01.
Питание блока осуществляется от сети переменного
тока напряжением 220 В, частотой 50 Гц. Класс стабилизации напряжения 0,2
(нестабильность напряжения не более 0.1%, пульсации не более 0.1%).
Блок имеет климатическое исполнение УХЛ4, но для
работы при температуре -1…+50°С и относительной влажности 40…80%.
Схема подключения блока питания показана на рис.
21. Общий вид блока питания показан на рис. 22.

Рис. 21 Блок питания Метран-602-024-120-01. Схема
подключения.
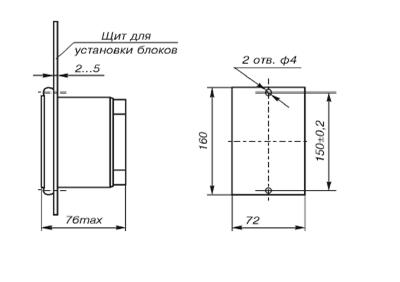
Рис. 22 Блок питания Метран-602-024-120-01. Вид
общий.
Будем предполагать, что для питания устройств
автоматики в силовой шкаф в котором будет смонтировано электрооборудование,
осуществляется ввод напряжения питания 220 В.
На рис. 20 буквой К также показан коммуникатор,
предназначенный для связи с управляющими устройствами. С помощью этого
коммуникатора управляющее устройство может осуществлять настройку датчика,
проводить его диагностику и считывать его показания. В качестве коммуникатора
применим HART-USB модем Метран-682. Модем имеет выходной USB-интерфейс и не
требует питания (питание осуществляется от шины питания USB интерфейса).
Хотя в данной задаче для стабилизации давления
на выходе насоса не требуется знать текущий расход воды, применим датчик
расхода для того, чтобы иметь возможность передать на диспетчерский управляющий
пункт текущее значение расхода воды.
В качестве датчика расхода воды применим датчик
Метран-350-М. Схема его включения представлена на рис. 23 и несколько
отличается от аналогичной схемы на рис. 19. Для связи с верхним управляющим
уровнем применим ещё один HART-USB модем Метран-682.

Рис. 23 Схема подключения датчика
расхода воды Метран-350
Основные технические характеристики
датчика расхода приведены ниже:
· измеряемый объёмный расход - от 4,2
м3/ч до 20853600,0 м3/ч;
· основная относительная погрешность -
±3%;
· унифицированный токовый выходной
сигнал 4-20 мА;
Датчик Метран-350-М по многим своим параметрам
(условиям эксплуатации, размерам т.п.) аналогичен датчику давления Метран-100.
Для питания обоих датчиков будем использовать разные гальванически
изолированные каналы блока питания Метран-602.
электропривод центробежный насос датчик
6.3 Выбор устройств защиты
Для защиты по входу преобразователя частоты от
коротких замыканий поставим автоматический выключатель NM8-630 со следующими
параметрами [13]:
· номинальное рабочее напряжение - 660
В;
· номинальный ток - 630 А;
· номинальное напряжение изоляции -
750 В.
На рис. 24 приведены габаритные и установочные
размеры выключателя.
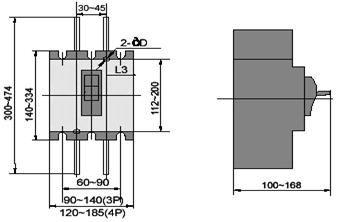
Рис. 24 Автоматический выключатель NM8-630
Для защиты привода достаточно одного
выключателя, т.к. преобразователь частоты содержит достаточно много встроенных
защит.
Для защиты системы автоматики на вводе
напряжения 380 В установим автоматический выключатель NM8-630. Через
выключатель будет питаться блок питания Метран-602. Блок питания Метран-602 будет
питать датчики. Для защиты блока питания Метран-602 применим предохранитель
ВП2-3 (вставку плавкую). В случае сгорания плавкой вставки не будет подаваться
питание на датчики. В этом случае работа привода не имеет смысла, поэтому на
выход блока питания поставим слаботочное реле с нормально-разомкнутыми
контактами, коммутируемые выводы которого включены в цепь аварийного останова
двигателя. В случае пропадания напряжения на реле, двигатель будет остановлен,
сигнальная светодиодная лампа потухнет и информация об этом может поступить на
диспетчерский пункт. В качестве такого реле применим электромагнитное реле
TRR-1A-24-D(исполненное в DIP корпусе) с параметрами:
· номинальное напряжение - 24 В;
· номинальная мощность - 50-268 мВт;
Для подавления помех на входе ПЧ и для
ограничения перенапряжения на выходе ставим фильтры РСТТ-630/0.022
(4EU3052-6UA) с номинальным током Iн=630A.
7. Разработка варианта конструктивного
исполнения электропривода
Основными компонентами, необходимыми к монтажу в
конструкции, являются:
. Автоматический выключатель NM8-630.
. Датчики давления
Метран-100-Вн-ДГ-1541-02-МП3-t12-015-50кПа-42-М80-С
. Фильтры РСТТ-630/0.022 (4EU3052-6UA).
. Блок питания Метран-602-024-120-01.
. Кнопка аварийного останова.
. Модем HART-USB Метран-682.
. Провода для системы управления.
. Датчик расхода воды Метран-350-М
Всю конструкцию расположим в настенном ящике.
Ящик выполнен из листовой оцинкованной стали толщиной 2 мм. Для жесткости
конструкции используется сварной каркас из уголков. Углы ящика зашлифованы, во
избежание травм и порезов. Для крепления шкафа к стене используем крепление
типа «уши». Отверстие для подводки проводов располагается снизу. Т.к.
климатические требования УХЛ4 и все оборудование удовлетворяет этим климатическим
требованиям, то дополнительная герметизация шкафа не требуется. Дверь навесная
крепится на двух петлях к шкафу. Дверь изготовлена из листовой стали 4 мм. По
краю двери крепится резиновый уплотнитель, способствующий надежному прилеганию
двери к ящику. Замки, установленные на двери, держат ее в закрытом состоянии.
Модемы расположены в нижней части шкафа. Автоматические выключатели и блок
питания датчика крепятся на боковой стенке при помощи швеллеров.
8. Выбор силовых и слаботочных
проводов и кабелей
Для снижения излучаемых и воспринимаемых помех
будем применять экранированные провода и кабели перевитые между собой. Выбор
проводов будем производить исходя из области их применения, выдерживаемого
изоляцией напряжения, механической прочности и максимального тока, который
может по ним протекать длительное время, не приводя к их перегреву [9].
Для ввода напряжения 380 В и подключения
двигателя применим кабель ВВГз 5х4 (ож-0.66). Кабель предназначен для прокладки
в промышленных помещениях.
Для ввода напряжения 220 В применим силовой
медный двухжильный кабель сечением 46 мм2 на ток 630 А и напряжение
до 1 кВ с изоляцией пропитанной маслоканифольным составом марки ААГУ.
Для подключения слаботочных цепей управления
применим провода марки КУПР-Пн четырёхжильный, в оплётке со стальными
нержавеющими проволоками в резиновой оболочке, сечением 0,75 мм. Провод
выдерживает напряжение 250 В.
Заключение
В настоящем курсовом проекте спроектирован
электропривод мощного насоса.
Для этого был выбран двигатель, выбран способ и
алгоритм его управления. Алгоритм управления реализован с помощью современного
преобразователя частоты и датчиков. Моделирование на ЭВМ показало адекватность
такой системы управления.
Система электропривода построена на современной
элементной базе, обладающей большой надёжностью и экономичностью, позволяющей
осуществлять плавное регулирование режимов работы приводного двигателя.
Встроенная поддержка современных протоколов связи (ModBus, USB) даёт
возможность осуществлять удалённое управление, контроль, диагностику и
настройку электропривода, т.е. сделать электропривод частью современной
распределённой АСУ ТП.
Для системы управления электродвигателем
разработан силовой шкаф, в котором размещена большая часть оборудования,
применяемого для управления электродвигателем.
Список литературы
1. Справочник
по автоматизированному электроприводу / Под ред. В. А. Елисеева и А. В.
Шинянского -М.: «Энергоатомиздат», 1983
. Черкасский
В. М. Насосы, компрессоры - М.: «Энергия», 1977
. Шлипченко
З. С., Насосы, компрессоры и вентиляторы - Киев, «Технiка», 1976
. Справочник
по электрическим машинам: в 2-х т./ Под общей ред. И. П. Копылова и Б. К.
Клокова. Т. 1 - М.: «Энергоатомиздат», 1988
. Белов
М. П. Автоматизированный электропривод типовых производственных механизмов и
технологических комплексов - М.: «Академия», 2004
. Ключев
В. И., Терехов В. М. Электропривод и автоматизация общепромышленных механизмов
- М.: «Энергия», 1980
. Терехов
В. М. Системы управления электроприводов - М.: «Академия», 2005
. Электрические
кабели, провода и шнуры: Справочник / под ред. Н. И. Белоррусова - М.:
«Энергоатомиздат», 1988
. Каталог
фирмы ПЛАТАН Электронные компоненты - М., 2005.
. Тематический
каталог фирмы МЕТРАН “Датчики давления. Комплектные поставки”
.
Тематический каталог фирмы МЕТРАН “Расходомеры. Счётчики. Комплектные поставки”
.
И. И. Алиев, М. Б. Абрамов Электрические аппараты: Справочник - М.:
«Энергоатомиздат», 2004
.
Ключев В.И. Теория электропривода - М.: «Энергоатомиздат», 2001
.
Онищенко Г. Б. Электрический привод - М.: «РАСХН», 2003
.
Козаченко А. Н., Никишин В. И., Поршаков Б. П. Энергетика трубопроводного
транспорта газов - М.: «Нефть и газ», 2001