Разработка системы управления движением гибридного автомобиля
УДК 681.51
Аннотация
В проекте представлена разработка системы управления режимами движения
гибридного автомобиля на базе последовательно-параллельной схеме. Разработана и
смоделирована в программной среде MATLAB SIMULINK. Выбраны устройства питания,
элементы и датчики системы. Разработаны структурная и электрическая
принципиальная схемы, алгоритм режимов движения. Рассмотрены режимы движения
гибридной установки. В экономической части определяется обоснование выбора
аналога, сравнивается стоимость оценки аналога, расчеты цены разработки, расчет
технико-экономических показателей разработки. Рассматриваются вопросы по
безопасности жизнедеятельности.
summary
The project presents the development of the system mode
control the hybrid vehicle based on the series-parallel circuit. Designed and modeled in the software
environment MATLAB SIMULINK. Selected power devices, sensors and system
elements. The structural and electrical schematics, algorithm modes of
movement. Considered regimes of hybrid installation. In an economic part the
cost a wage fund of personnel, price system and also calculation point capital
by method CVP-analyze are performed. Questions on safety of ability to live are
considered.
Содержание
Введение
. Обзор по теме и определение структурной схемы
.1 Обзор существующих аналогов гибридных схем
.2 Выбор датчиков
.3 Двигатель внутреннего сгорания
.4 Мотор-генератор
.5 Выбор преобразователя напряжения
.6 Высоковольтная батарея
.7 Устройство распределения мощности
.8 Линейный график работы планетарной передачи
.9 Система управления гибридной установкой
. Разработка системы управления движением гибридного
автомобиля
.1 Принципиальная схема
.2 Режимы движения гибридного автомобиля
.3 Алгоритм режимов движения
. Моделирование гибридной установки в SIMULINK
. Технико-экономическое обоснование проекта
.1 Анализ соотношения затрат и прибыли
.2 Расчет затрат на этапе проектирования
.3 Расчет стоимости материалов и комплектующих системы
.4 Расчет себестоимости и рыночной цены
.5 Графический метод CVP-анализа
. Безопасность и экологичность проекта
.1 Системный анализ надёжности и безопасности системы
.2 Разработка мероприятий по повышению надежности и безопасности.
.3 Пожарная безопасность при производстве и монтаже
устройства
.4 Защита окружающей среды
Заключение
Список литературы
Введение
Дипломный проект на тему “Разработка системы управления движения
гибридным автомобилем” по специальности 140607 электрооборудование автомобилей
и тракторов выполнена на кафедре электротехники и мехатроники в соответствии с
приказом ректора ЮФУ № 4290 от 08.05.2014г.
Ухудшение экологической обстановки, обусловленное вредным воздействием
автотранспорта, в городах носит катастрофический характер, в первую очередь в
связи с загрязнением воздушного бассейна выбросами вредных веществ
автомобильных двигателей, поэтому приоритетной задачей проектирования городских
автомобилей является снижение количества выбросов вредных веществ и улучшение
топливно-экономических показателей проектируемых автомобилей.
Гибридный автомобиль - высокоэкономичный автомобиль, движимый системой
«электродвигатель - двигатель внутреннего сгорания» (далее двигатель), питаемой
как горючим, так и зарядом электрического аккумулятора. Главное преимущество
гибридного автомобиля - снижение расхода топлива и вредных выхлопов. Это
достигается полным автоматическим управлением режима работы системы двигателей
с помощью бортового компьютера, начиная от своевременного отключения двигателя
во время остановки в транспортном потоке, с возможностью продолжения движения
без его запуска, исключительно на энергии аккумуляторной батареи, и заканчивая
более сложным механизмом рекуперации - использования электродвигателя как генератора
электрического тока для пополнения заряда аккумуляторов.
В свете изложенной проблемы следует вывод, что тема дипломного проекта
“Разработка системы управления движения гибридного автомобиля” актуальна для
настоящего времени.
Объектом исследований является электрооборудование автомобиля.
Предмет исследований - система управления движения гибридным автомобилем.
Целью дипломного проекта является разработка такой системы управления
движения гибридным автомобилем, которая обеспечит наилучшее распределение
энергии в гибридной силовой установке, при наименьших затратах и обеспечением
безопасности и экологии.
Для достижения поставленной цели необходимо решить следующие задачи:
привести обзор современных датчиков;
привести обзор существующих гибридных схем;
разработать общий алгоритм работы системы;
разработать схему электрическую принципиальную устройства и элементов
питания;
разработать алгоритм режимов движения;
рассчитать себестоимость системы ее рыночную цену;
выбрать метод для определения безубыточности реализации системы, в
которой наступает окупаемость издержек и есть прибыль;
провести системный анализ надежности и безопасности;
разработать мероприятия по безопасности, дерево причин отказов;
определить опасные факторы для окружающей среды и мероприятия по защите.
Практическая ценность работа состоит в том, что представленная система
может более рационально распределять как электрическую, так и механическую
энергию.
Методическим обеспечением дипломной работы является научно техническая,
периодическая литература, справочники, нормативные документы - ГОСТ, ПУЭ,
интернет.
. Обзор по
теме и определение структурной схемы
.1 Обзор
существующих аналогов гибридных схем
Известны три варианта гибридных силовых установок:
Последовательная схема.
Рисунок 1.1 - Схема гибридной установки последовательного типа
ДВС работает только на генератор, при этом выбирается режим минимального
расхода топлива. Энергия, вырабатываемая генератором, подается либо на тяговый
электродвигатель, либо в накопитель энергии и на тяговый электродвигатель, либо
только в накопитель энергии. Тяговый электродвигатель обеспечивает весь
необходимый силовой и скоростной диапазоны транспортного средства и при его
замедлении работает в режиме генератора, обеспечивая рекуперацию энергии
торможения.
Достоинствами последовательной схемы являются: возможность работы
первичного двигателя (ДВС) в постоянном режиме минимального расхода топлива,
простота управления силовой установкой, отсутствие специальных узлов трансмиссии.
К недостаткам следует отнести слишком малый КПД системы превращения энергии от
двигателя внутреннего сгорания до приводных колес. Такая схема применяется на
Toyota Coaster Hybrid и различных автобусах, оснащенных гибридными силовыми
установками.
Параллельная схема.

Рисунок 1.2 - Схема гибридной установки параллельного типа
ДВС и тяговый электродвигатель (ТЭД), питаемый от аккумуляторной батареи
(АБ) через трансмиссию, связаны с ведущими колесами. Преимуществом параллельной
схемы является более высокий КПД передачи энергии от первичного двигателя к
ведущим колесам, в сравнении с последовательной схемой, и возможность
применения одной электромашины вместо двух.
Недостаток - обязательное усложнение трансмиссии для обеспечения отбора (подвода)
мощности электрической машины, отход первичного двигателя от режима
минимального расхода топлива при регулировании скорости движения транспортной
машины и определенное усложнение системы управления трансмиссией.
Возможен вариант и параллельной схемы, при которой обратимая
электромашина устанавливается в приводе другого ведущего моста, чем ведущий
мост трансмиссии первичного ДВС. Например, при переднеприводной схеме
трансмиссии первичного двигателя обратимый электрический мотор устанавливается
в приводе заднего моста. Достоинством такого варианта следует считать
определенное упрощение трансмиссии первичного двигателя, недостатком -
использование колесного движителя в качестве элемента системы превращения
энергии. Эта схема применяется на Honda Civic Hybrid.
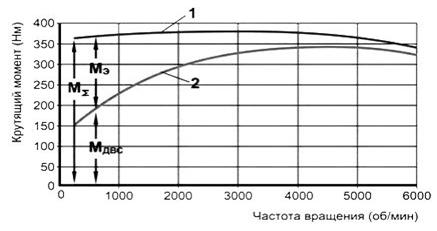
Рисунок 1.3 - Увеличение крутящего момента при совместной работе ДВС и
электродвигателя в параллельной схеме
На рисунке 3 1 - кривая суммарного момента; 2 - кривая момента ДВС; M∑
- суммарная величина момента ДВС (МДВС) и момента электродвигателя
(MЭ).
В обычных условиях частичных нагрузок вполне достаточно ДВС уменьшенного
объема, а в случае необходимости большей мощности (чаще дополнительного
крутящего момента) на помощь ДВС приходит электрический двигатель. Особенно
важно отметить, что технические характеристики двигателя внутреннего сгорания и
электрического двигателя сильно отличаются. Двигатель внутреннего сгорания
имеет максимальный крутящий момент только при достаточно высоких оборотах, а
электрический двигатель развивает максимальный крутящий момент на самых низких
оборотах вращения. Совместная работа ДВС и электродвигателя обеспечивает
необходимые динамические качества автомобиля, даже при применении ДВС меньшей
мощности.
Последовательно-параллельная схема.
Рисунок 1.4 - схема последовательно-параллельной гибридной установки
Эта система сочетает в себе последовательную гибридную систему с
параллельной для получения максимальных преимуществ от обеих систем. Она имеет
два двигателя, и в зависимости от условий движения использует только
электромотор или приводится в движение совместно с ДВС для достижения высокого
уровня эффективности. В дальнейшем, когда это необходимо, система приводит в
движение колёса, одновременно вырабатывая электричество, задействовав
генератор. Такая система используется на Toyota Prius, Estima Hybrid и Lexus
RX400h. В последовательно-параллельном гибриде (Toyota Hybrid System),
планетарный делитель мощности разделяет силовой поток, идущий от двигателя так,
что соотношение мощности, поступающей непосредственно на колёса, и идущей на
генератор может плавно изменяться. Поскольку электродвигатель может работать на
вырабатываемой электроэнергии, то он используется больше, чем при параллельной
схеме.
Система HSD устанавливается на хэтчбеке Toyota Prius, седане бизнес
-класса Camry, всех дорожниках Lexus RX400h, Toyota Highlander Hybrid, Harrier
Hybrid, спортивном седане Lexus GS 450h и автомобиле люкс-класса - Lexus LS
600h. Ноу-хау компании Тойота куплено компаниями Форд и Ниссан и использовано
при создании Ford Escape Hybrid и Nissan Altima Hybrid. Toyota Prius лидирует
по продажам среди всех гибридов. Расход бензина в городе составляет 4 л на 100
км пробега. Это первый автомобиль, у которого потребление топлива при движении
в городе меньше, чем на шоссе. На Парижском автосалоне 2008 была представлена
модель Приус plug-in hybrid.
Из всего сказанного можно сделать вывод, что, наверное, нет смысла
считать гибридные автомобили решением всех проблем. Это скорее промежуточный
этап на пути к будущей машине с нулевым выбросом вредных веществ. Гибридные
технологии дают возможность отработать ее ключевые технические компоненты -
емкие компактные аккумуляторы, оптимизированные системы «повторного
использования» энергии, технологию быстрой зарядки от внешних источников, новые
электродвигатели, облегченные кузова. Только массовое производство этих узлов
сможет приблизить то время, когда вместо поездки на заправку достаточно будет
подключить железного коня на часок к обычной домашней электросети - а потом
ездить целый день без подзарядки.
1.2 Выбор
датчиков
Высокоточный датчик тока.
Проблемы окружающей среды, такие как глобальное потепление, загрязнение
воздуха и проч., находятся под пристальным вниманием ученых. Разработаны
гибридные автомобили, позволяющие снизить нагрузку на экологию благодаря
уменьшенному выбросу отработанных газов и потребляющие меньше топлива. По мере
снижения стоимости производства гибридных автомобилей спрос на них неуклонно
растет. Помимо этого осуществляются попытки популяризировать электромобили и
автомобили на топливных элементах, которые имеют нулевые выбросы вредных
веществ в атмосферу.
Требования к автомобильным датчикам тока.
Для гибридов, электромобилей и авто на топливных элементах, вносящих
ощутимый вклад в борьбу за чистоту окружающей среды, а также для двигателей со
встроенным источником питания необходима такая функция, как способность системы
отслеживать и точно контролировать ток электромотора в режиме движения и токи
заряда/разряда аккумуляторной батареи. Количество датчиков как ключевых
компонентов, служащих «глазами» системы мониторинга, на борту таких автомобилей
значительно выросло. В таблице 1.1 представлено сравнение самых
распространенных на рынке датчиков тока. Каждый из них имеет свои преимущества
и недостатки в точности, изоляционных свойствах, типе измеряемого тока,
количестве компонентов, потреблении тока и стоимости. Выбор типа датчика
обусловлен конкретным применением и специфическими требованиями.
Таблица 1.1 - Основные типы датчиков тока
|
Метод измерения
|
Метод резисторного шунта
|
Метод токового трансформатора
|
Магнито-пропорциональный метод
|
Метод магнитного баланса
|
|
Чувствительный элемент
|
Резисторный шунт
|
-
|
Датчик Холла
|
Датчик холла
|
|
Точность
|
Низкая
|
Очень низкая
|
Высокая
|
Очень высокая
|
|
Изоляция
|
Очень низкая
|
Высокая
|
Высокая
|
Высокая
|
|
Измеряемый ток
|
AC/DC
|
AC
|
AC/DC
|
AC/DC
|
|
Количество компонентов
|
Большое
|
Среднее
|
Среднее
|
Низкое
|
|
Потребление тока
|
Среднее
|
Низкое
|
Низкое
|
Среднее
|
|
Стоимость
|
Низкая
|
Низкая
|
Средняя
|
Высокая
|
гибридный автомобиль передача движение
Требования, предъявляемые к автомобильным датчикам.
Аккумуляторные батареи автомобиля обеспечивают питание постоянным током,
но в транспортных средствах также используется и переменный ток. Поэтому есть
необходимость измерять оба типа тока и, следовательно, токовый трансформатор,
который не может измерять постоянный ток, не пригоден для использования.
Высокая точность.
Контроль токов инвертора и ЭД гибридного автомобиля, особенно токов
заряда/разряда аккумулятора, производится методом расчета на основании данных
от нескольких датчиков. Погрешности измерений всех датчиков суммируются, а это
значит, что в данном применении к точности показаний предъявляются высокие
требования. Более того, датчик тока должен обладать высокой точностью измерения
в широком температурном диапазоне. Это требование делает непригодными в данных
условиях токовый трансформатор и резисторный шунт.
Высокие изоляционные свойства.
В большинстве случаев на автомобилях используются высоковольтные
аккумуляторные батареи (АБ) напряжением в несколько сотен вольт. Это означает,
что есть необходимость полностью изолировать АБ от низковольтных электрических
цепей и блоков управления, а значит, датчик тока, который разделяет высоко- и
низковольтную часть, должен быть бесконтактным и низкоиндуктивным.
Неизолированный резисторный шунт в таких случаях можно использовать, только
если его дополнить трансформатором или оптопарой, а это приведет к ненужному
усложнению схемы.
Высокая надежность.
Автомобильные стандарты устанавливают жесткие требования к оборудованию в
условиях воздействия электростатического электричества, импульсных помех,
резких перепадов температуры, вибрации и ударных нагрузок. Японская компания
TDK разработала датчик тока SAA-200, первый в одноименной серии. Он был
установлен на многие автомобили и получил высокую оценку за свою стабильную
работу в составе системы.
Особенность датчика SAA-200.
Для достижения необходимой точности наиболее подходящими являются
магнитопропорциональный метод и метод магнитного баланса. Компания TDK в своих
датчиках использовала метод магнитного баланса, так как он позволяет достичь
максимальной точности.
Принцип работы данного метода заключается в следующем. В воздушный зазор
сердечника из магнитомягкого материала с высокой проницаемостью помещается
датчик Холла. Магнитный поток В1, пронизывающий датчик Холла, увеличивается или
уменьшается пропорционально измеряемому току (кабеля, токовой шины и т. д.),
проходящему сквозь сердечник. Сигнал от датчика Холла подается на операционный усилитель,
выход которого соединен с катушкой обратной связи, по которой течет ток
обратной связи, вызывающий встречный магнитный поток В2. Обмотка обратной связи
сделана так, чтобы магнитный поток В2 был равен В1.
Пример.
×N1 = I2×N2.
Если I1 = 200 A, N1 = 1 виток, N2 = 4000 витков, то имеем: 200×1 = I2×4000 = 200 A. Отсюда получаем I2 =
0,05 A.
Это означает, что через измерительный резистор протекает ток 0,05 A.
Таким образом, измеряемый ток I1 определяется путем измерения напряжения на резисторе.
Этот общепринятый метод обеспечивает отличную стабильность и точность.
Линейность выходной характеристики.
При использовании магнито - пропорционального метода магнитный поток в
сердечнике возрастает пропорционально увеличению измеряемого тока, и предел
измерения тока определяется уровнем, при котором происходит насыщение
сердечника
Рисунок 1.7 - Пример выходной характеристики
В отличие от этого при использовании метода магнитного баланса магнитный
поток внутри сердечника равен нулю - благодаря уравнивающему магнитному потоку,
вызванному действием катушки обратной связи, как описано выше.
Таблица 1.2 Сравнение датчиков текущего и нового поколения
|
Параметры
|
Текущее поколение датчиков
|
Новое поколение датчиков тока
|
|
Метод
|
Магнитный баланс
|
Магнитный баланс
|
|
Напряжение ИП
|
± 12В
|
+ 5В
|
|
Выходной параметр
|
Выходной ток
|
Выходное напряжение
|
|
Примеры
|
+ 200А "+50мА
|
+ 200А" +4.5В
|
|
0А "0мА
|
0А "+2.5В
|
|
-200А "-50мА
|
-200А "+0.5В
|
Магнитное насыщение отсутствует даже при измерении больших токов, и
линейность выходной характеристики всегда очень хорошая и не зависит от
линейности характеристики датчика Холла.
Температурная стабильность.
Коэффициент усиления датчика Холла в сильном магнитном поле зависит от
окружающей температуры, поэтому и точность измерения тока также зависит от
температуры. Однако на датчик тока, сделанный по методу магнитного баланса,
влияет только температурный сдвиг, а в целом температурная характеристика
близка к идеальной и обеспечивает высокую точность измерения в широком
температурном диапазоне.
Дальнейшее развитие.
Напряжение источников питания в 5 В становится общепринятым для
последнего поколения электронных блоков управления. Кроме того, дабы
соответствовать требованиям рынка, вместо источников тока все чаще используют
источники напряжения - из-за простоты их использования. В то же время диапазон
измерения тока планируется расширить с ±200 до ±300 A. Особенности датчиков
SAA-200.
выходная характеристика с отличной помехоустойчивостью;
высокая точность измерений, не зависящая от величины измеряемого тока и
окружающей температуры;
бесконтактный метод, обеспечивающий полную изоляцию от токоведущих шин
(электрических проводов).
Будучи установленным на транспортные средства, датчик успешно прошел
тесты на надежность.
.3 Двигатель
внутреннего сгорания
За основу был взят двигатель 1NZ-FXE.
Двигатель 1NZ-FXE был произведен самым первым во всей серии. Его
производство было начато в Японии. Диаметр цилиндра составляет 75 мм, а ход
поршня 84,7 мм. На него устанавливались кованные шатуны и алюминиевый впускной
коллектор. Степень сжатия очень высока и составляет 13:1. Вместе с высокой
степенью сжатия впускные клапана закрываются с запаздыванием, чем симулируется
цикл Аткинсона, а не обычный цикл Отто. Что в свою очередь положительно
сказывается на эффективности двигателя.
Из-за того, что впускной клапан закрывается с опозданием во впускной
коллектор возвращается часть смеси из цилиндра, это отрицательно сказывается на
мощности, но положительно на эффективности и экологичности. Такая комбинация
1NZ-FXE отлично подходит для использования на так называемых
"гибридных" автомобилях HSD (Hybrid Synergy Drive), на которых пик
крутящего момента и мощности имеют меньшее значение. Мощность сего агрегата
составляет 76 л.с. при 5000 оборотах в минуту и 115 Н · м при 4000 оборотах в
минуту.
Таблица 1.3 - Технические характеристики 1NZ-FXE
|
Количество цилиндров
|
4
|
|
Расположение цилиндров
|
Рядное
|
|
Клапаны
|
VVT-i, DOHC 16V
|
|
Объем двигателя, л(куб. см)
|
1,5 л(1497)
|
|
Мощность, л.с.(Н · м)
|
76(115)
|
|
Система впрыска
|
EFI, Распределенная
|
|
Система зажигания
|
DIS-4
|
Двигатель работает по циклу Аткинсона.
В первом небольшом двигателе такого типа, запущенном в коммерческое
производство, революционная технология EXlink от компании будет характеризоваться
более длинным тактом расширения по сравнению с тактом сжатия, чтобы степень
расширения была больше степени сжатия.
По сравнению со стандартным двигателем Отто, в котором длины хода поршней
имеют практически одинаковое значение, EXlink характеризуется тем, что ход
расширения и выпуска оказывается больше, чем ход впуска и сжатия. В результате
степень расширения более чем в 1,4 раза превышает степень сжатия EXlink,
обеспечивая меньшие насосные потери и значительно более высокий термический КПД
по сравнению со стандартным двигателем.
В XIX столетии двигатель Аткинсона отличался исключительной экономией
топлива, однако из-за своей сложной архитектуры он был непрост в изготовлении в
небольшом масштабе и поэтому исчез из рядов разрабатываемых двигателей.
Говоря о моторе Аткинсона имеют ввиду «цикл Аткинсона» - модифицированный
цикл Отто четырехтактного двигателя внутреннего сгорания, предложенный
английским инженером Джеймсом Аткинсоном в 1886 году. Аткинсон изменил
соотношение времен тактов цикла Николауса Отто.
В двигателе Аткинсона рабочий ход (3-й такт цикла Отто) был увеличен за
счет усложнения кривошипно-шатунного механизма, тогда, в XIX веке, двигатель
распространения не получил из-за сложной механики. В нынешнем веке двигатель
Аткинсона с компьютерным регулированием времен тактов применяется на
автомобилях Toyota Prius, Lexus HS 250h, Lexus CT 200h, американском Ford
Fusion, хотя примененный там принцип больше напоминает цикл Миллера.
Цикл Аткинсона позволяет получить лучшие экологические показатели и экономичность,
но требует высоких оборотов. На малых оборотах мотор выдает сравнительно малый
момент и может заглохнуть.
Бензиновый двигатель Toyota Prius работает по циклу Аткинсона со сжатием
13:1 на обычном бензине (АИ-95). Время закрытия впускного клапана, обороты и
нагрузку на двигатель контролирует бортовой компьютер. На этой машине
применение двигателя Аткинсона особенно выгодно, так как на малых оборотах он
не нагружается.
Фактически на данном автомобиле применен не двигатель Аткинсона, а его
упрощенный аналог, построенный по принципу цикла Миллера. Prius разгоняется
электромотором, который выдает полный момент в широком диапазоне оборотов.
Эти двигатели данной модели обладают переменной степенью сжатия.
Этот параметр специалисты считают одним из главных в двигателе. Ведь чем
выше степень сжатия, тем больше мощность, КПД мотора и лучше его экономичность.
Поэтому, чем современнее становились ДВС, тем больше у них становилась степень
сжатия. Но в последнее время такая тенденция практически прекратилась. Дело в
том, что бесконечно увеличивать этот параметр тоже нельзя, иначе в цилиндрах
будет происходить взрывное, неконтролируемое сгорания рабочей смеси. Иными
словами - детонация, которая может привести даже к разрушению мотора.
Причем особенно чувствительны к увеличению степени сжатия моторы с
наддувом. Ведь у них нагрузка на детали больше, они сильнее нагреваются и риск
появления детонации соответственно выше. Так что степень сжатия приходится
снижать. При этом соответственно падает и эффективность двигателя.
Таким образом, в идеальном случае степень сжатия должна плавно меняться в
зависимости от режима работы и нагрузки на мотор. Об этом задумались еще в
середине прошлого века. Появилось множество проектов весьма оригинальных
конструкций, у которых, по сути, была одна общая черта - сложность, дороговизна
и как следствие, непригодность к серийному производству.
.4
Мотор-генератор
В качестве электрического мотора был выбран мотор-генератор с автомобиля
Toyota Prius, данный выбор является удачным решением.
В трансмиссии автомобиля Prius используются две электрические машины,
чаще называемые мотор-генераторами. По конструкции мотор-генераторы практически
не отличаются друг от друга, но они отличаются по размерам. Оба
мотор-генератора являются электрическими синхронными трёхфазными
электромашинами переменного тока с возбуждением от постоянных магнитов. Звучит
немного запутанно, на самом деле всё значительно проще. Ротор мотор-генератора
(вращающаяся деталь, соединённая с валом), по существу является постоянным магнитом
и не имеет никаких обмоток или электрических соединений. А в статор
(неподвижная часть мотор-генератора) встроено три комплекта обмоток. При
движении тока в одном направлении через один комплект обмоток ротор
перемещается в определённое положение. При направлении тока поочерёдно через
все три комплекта обмоток сначала в одном направлении, а потом в
противоположном, заставляет ротор перемещаться из одного положения в другое,
совершая вращательное движение. Разумеется, это описание работы синхронного
трёхфазного двигателя очень примитивно, но оно позволяет иметь некоторое
представление о работе мотор-генератора.
Но мотор-генератор может работать не только в режиме электродвигателя, но
и в режиме генератора. При вращении вала мотор-генератора от постороннего
источника механической энергии в комплектах обмоток статора индуктируется
электрический ток, который можно использовать, как для зарядки высоковольтной
аккумуляторной батареи, так и для питания другого электрического двигателя.
Мотор-генератор 1 (MG1) соединён с солнечной шестернёй делителя мощности
(планетарный механизм). Мотор-генератор (MG1) являющимся меньшим из двух имеет
максимальную мощность 18 кВт. Мотор-генератор MG1 обычно применяется для
запуска ДВС или для регулирования скорости вращения двигателя внутреннего
сгорания за счёт изменения электрической нагрузки (количества вырабатываемой
электрической энергии) на этот генератор. Мотор генератор 2 (MG2) соединён с
корончатой шестернёй делителя мощности и, следовательно, имеет механическое соединение
через одноступенчатый механический редуктор с ведущими колёсами автомобиля.
Поэтому MG2 имеет возможность приводить в движение автомобиль. Максимальная
мощность MG2 больше максимальной мощности MG1 и равна 50 кВт. Иногда MG2
называют тяговым электродвигателем, предназначение которого привод автомобиля
или регенерация энергии при торможении автомобиля. Разумеется, в этом случае
MG2 переключается в режим работы генератора. Оба мотор-генератора имеют
жидкостное охлаждение.
1.5 Выбор
преобразователя напряжения
Инвертор сложное электронное устройство, предназначенное для:
преобразования постоянного тока высоковольтной батареи (HV battery) в
трехфазный ток для работы мотор-генераторов MG 1 и MG 2 и обратно
обратного преобразования энергии (рекуперация,- от лат. recuperatio -
обратное получение, возвращение части материала или энергии, расходуемых при
проведении того или иного технологического процесса, для повторного
использования в том же процессе. Применительно к рассматриваемому вопросу
преобразование механической энергии в электрическую. За это в блоке инвертора
отвечает прибор называемый «конвертором»)
регулирования и распределения энергии, получаемой от MG 1
электронного управления мотор-генераторами MG 1 и MG 2 в зависимости от
режимов работы двигателя внутреннего сгорания на основании согласованных
действий с остальными электронными устройствами автомобиля.
Поскольку моторы/генераторы работают от переменного трехфазного тока, а
батарея, как и все батареи, производит постоянный ток, необходимо некое устройство,
чтобы преобразовать один вид тока в другой. Каждый MG имеет
"инвертор", который выполняет эту функцию. Инвертор узнает положение
ротора от датчика на валу MG и управляет током в обмотках мотора так, чтобы
поддерживать вращение мотора на требуемой скорости и с необходимым вращающим
моментом. Инвертор изменяет ток в обмотке, когда магнитный полюс ротора
проходит мимо этой обмотки и переходит к следующей. Кроме того, инвертор
подключает напряжение батареи на обмотки и затем выключает снова очень быстро
(с высокой частотой), чтобы изменить среднее значение тока и, следовательно,
крутящий момент.
Используя "самоиндуктивность" моторных обмоток (свойство
электрических катушек, которые сопротивляются изменению тока), инвертор может
фактически пропустить больший ток через обмотку, чем поступает от батареи. Он
работает только когда напряжение на обмотках меньше напряжения батареи,
следовательно, энергия сохраняется. Однако, поскольку значение тока через
обмотку определяет крутящий момент, этот ток позволяет достигнуть очень
большого крутящего момента на малых оборотах. Приблизительно до 11 км/ч, MG2
способен создать крутящий момент 350 Нм (400 Нм для Prius NHW-20) на редукторе.
Именно поэтому автомобиль может начать движение с приемлемым ускорением без
использования коробки передач, которая обычно увеличивает крутящий момент ДВС.
При коротком замыкании или перегреве инвертор отключает высоковольтную часть
машины. В одном блоке с инвертором расположен и конвертер, который предназначен
для обратного преобразования переменного напряжения в постоянное - 13,8 вольт.
Система охлаждения инвертора.
Инвертор при работе сильно нагревается и, если бы не имел своего
охлаждения, то после перегрева вышел бы из строя. В 10-м и 11-м кузовах
Inverter имеет отдельные контура охлаждения и отдельный радиатор. В 20-м кузове
радиатор инвертора совместили с радиатором двигателя.
Для локального охлаждения инвертор имеет «ребра» и «плиту» охлаждения.
Система охлаждения инвертора включает в себя:
радиатор;
водяную помпу (водяной электрический насос);
расширительный бачок;
соеденительные патрубки.
Работу каскада управления модулем IGBT приведу для модуля из трёх
транзисторов. Заключается она в следующем. Сигнал управления ключами поступает
на вход драйвера (1) (на плате это микросхемки ВМ122). Далее сигнал через
усилитель мощности (2) поступает на входы управляющих затворов самих
транзисторов. В схеме предусмотрено ограничение пиковых токов, проходящих через
каждый транзистор. Данная функция возложена на схемы токовой защиты (3),
которые предусмотрены для каждого транзистора индивидуально. Информация о токе
с каждого транзистора поступает на вход соответствующей ему схеме токовой
защиты, и в случае появления бросков тока схема должна «прикрывать»
соответствующий ключ, т.е. она работает как регулятор. Правда, на картинке я
указал выключатели. Кроме того, в случае возникновения подобной ситуации со
средним транзистором, то тут происходит полное отключение всего модуля.
1.6
Высоковольтная батарея
Высоковольтная батарея в 20-м Приусе (Toyota Prius Gibrid) состоит из 28
модулей, в каждом из которых находится 7 элементов номинальным напряжением 1,2
В. Это позволило увеличить мощность с 320 В (в 10 кузове) до 500 В. Повышению
напряжения способствовало также применение специального устройства booster.
Увеличение номинального напряжения позволило увеличить мощность MG2 до 50 КВт.
Никель-металлогидридные аккумуляторы для Приуса производит компания
Panasonic EV Energy (PEVE), на 60% принадлежащая Тойоте. Батареи типа NiMH
стремительно уходят в прошлое, и идущее им на замену новое поколение
литиево-ионных аккумуляторов Тойоты уже проходит испытания по всему миру.
Скорее всего, автомобили с этими батареями станут дороже, но их можно будет
заряжать от бытовой электросети.
Максимальный ток батареи - 80 А при разряде и 50 А при заряде.
Номинальная емкость батареи - 6,5 Ач, однако, электроника автомобиля позволяет
использовать только 40% этой емкости, чтобы продлить срок службы аккумулятора.
Состояние заряда может изменяться только между 35% и 90% полного номинального
заряда. Перемножив напряжение батареи и ее емкость, получим номинальный запас
энергии - 6,4 МДж (мегаджоулей), а используемый запас - 2,56 МДж. Этой энергии
достаточно, чтобы ускорить автомобиль, водителя и пассажира до 108 км/ч (без
помощи ДВС) четыре раза. Чтобы произвести такое количество энергии, ДВС
потребовалось бы приблизительно 230 миллилитров бензина. (Эти цифры приводятся
только для того, чтобы Вы представляли количество накопленной энергии в
батарее.)
Автомобилем нельзя управлять без топлива, даже если стартовать с 90%
полного номинального заряда с длинного спуска. Большую часть времени у вас есть
приблизительно 1 МДж пригодной к употреблению энергии батареи. Очень много ВВБ
попадает в ремонт именно после того, как у владельца заканчивается бензин (при
этом на табло загорится пиктограмма "Check Engine" ("Проверь
двигатель") и треугольник с восклицательным знаком), но владелец пытается
"дотянуть" до заправки. После падения напряжения на элементах ниже 3
В - они "умирают". На 20 кузове японские инженеры для увеличения
мощности пошли другим путем: они снизили количество элементов до 168, т.е.
оставили 28 модулей. Но для использования в инверторе напряжение батареи
повышается до 500 В с помощью специального устройства - booster. Увеличение номинального
напряжения MG2 в кузове NHW-20 позволило повысить его мощность до 50 КВт без
изменения габаритов.
.7 Устройство
распределения мощности
А качестве трансмиссии был выбран Делитель мощности (Power Split Device
(PSD). Основным компонентом трансмиссии автомобиля Prius является планетарный
механизм, который Toyota использует как Делитель мощности "Power Split
Device" (PSD).
Планетарный механизм, иногда называемый планетарным рядом, в
автомобилестроении устройство очень распространённое. В любую автоматическую
коробку передач встроено несколько планетарных механизмов.
В зависимости от требуемой нагрузки шестерни вращаются с определенной
частотой и в определенном направлении.
Потери в данной коробке минимальны, как и ее габариты, что позволяет
более рационально использовать мощность.
Этот механизм называется планетарным, поскольку имеет несколько
расположенных по кругу (сателитных) шестерней, вращающихся вокруг центральной
шестерни, называемой солнечной. Сателитные шестерни свободно вращаются на осях,
закреплённых на водиле сателитных шестерней, которое также вращается вокруг
общей оси планетарного механизма, вокруг которой вращается и солнечная
шестерня. Но в отличии действительных планет, все сателитные шестерни имеют
одинаковые размеры и расположены на одинаковом расстоянии от общей оси вращения
всего механизма.
Вокруг сателитных шестерней расположена наружная кольцевая (коронная)
шестерня, находящаяся в зацеплении, при помощи внутренних зубцов, со всеми
сателитными шестернями и также вращающаяся, как и все детали планетарного
механизма вокруг общей оси вращения.
Коленчатый вал двигателя внутреннего сгорания соединён с водилом
планетарного механизма. Поскольку сателитные шестерни имеют зацепление как с
солнечной шестернёй, со стороны центра механизма, так и с кольцевой шестернёй,
с наружной стороны сателитных шестерней при вращении водила сателитные шестерни
стараются повернуть и солнечную, и наружную кольцевую шестерни в сторону
вращения водила.
Благодаря точному подбору размеров солнечной и наружной кольцевой
шестерней (точнее количества их зубьев) 72% крутящего момента передаётся на
наружную шестерню (к ведущим колёсам), а оставшиеся 28% крутящего момента
передаётся на солнечную шестерню (к мотор-генератору MG1). Обратите внимание,
не мощности, а крутящего момента.
1.8 Линейный
график работы планетарной передачи
Графики зависимости работы ДВС, генератора и электрического мотора.
Автомобиль не заведен.
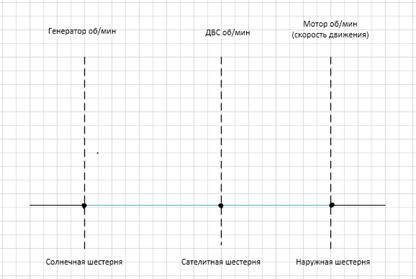
Рисунок 1.27 - график зависимости крутящего момента в незаведенном
состоянии
Двигатель внутреннего сгорания, генератор и электромотор не работают.
Во время запуска.

Рисунок 1.28- график зависимости крутящего момента во время запуска
Автомобиль при старте движения использует только электрический мотор.
Во время разгона со старта.
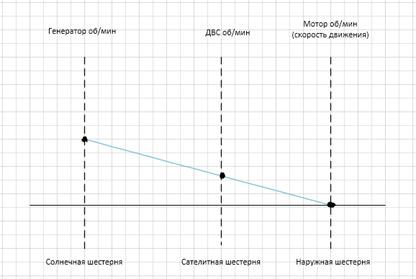
Рисунок 1.29 - график зависимости крутящего момента во время разгона
Генератор, который так же обладает функцией стартера, вращает солнечную
шестерню и запускает двигатель. Когда двигатель запустился, генератор начинает
вырабатывать электричество, которое заряжает батарею и помогает электрическому
мотору работать.
Во время нормального движения.
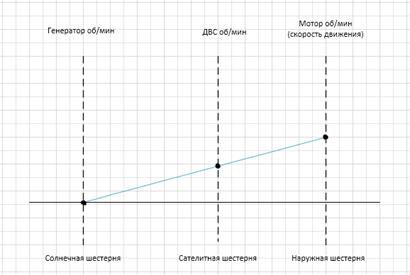
Рисунок 1.30 - график зависимости крутящего момента во время нормального
движения
По большей части, двигатель внутреннего сгорания используется для
движения. Производство энергии в данном режимы не нужно.
Во время разгона.
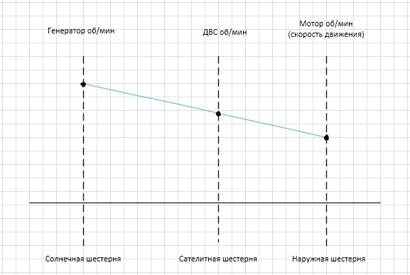
Рисунок 1.32 - график зависимости крутящего момента во время ускорения
Во время ускорения с нормальном режиме движения, обороты двигателя
внутреннего сгорания увеличиваются, в тоже время генератор начинает
вырабатывать электричество. Используется это электричество и электричество с
высоковольтной батареи, двигатель внутреннего сгорания добавляет своей мощности
для увеличения ускорения.
1.9 Система
управления гибридной установкой
Система управления THS II поддерживает автомобиль на максимальной
эффективности за счет управления энергии, используемой транспортным средством,
в которую входит энергия используемая для движения, а также энергия,
используемая для вспомогательных устройств, таких как кондиционера,
нагреватели, фар и навигационная система. Система управления контролирует
требования и рабочие состояния компонентов гибридной системы, таких как
двигатель, который является источником энергии для всей гибридного автомобиля;
генератор , который выступает в качестве стартера для двигателя и преобразует
энергию механическую в электрическую; электрический двигатель, который приводит
в движение транспортное средство с использованием электрической энергии от
батареи; аккумулятор , который сохраняет электрическую энергию генерируется
электроэнергию двигателем во время торможения.
Иными словами, система управления THS II отслеживает различные режимы
потребления энергии транспортного средства в реальном времени и обеспечивает
точный и быстрый контроль над транспортным средством, для того, чтобы
транспортное средство эксплуатировалось безопасно и комфортно на самом высоком
КПД.
Рисунок 1.33 - Блок схема системы управления
. Разработка системы управления движением гибридного автомобиля
.1
Принципиальная схема
Для данной гибридной установки была разработана и сделана в MS Office
Visio принципиальная схема.
Рисунок 2.1 - принципиальная схема системы управления силовой гибридной
установки
На рисунке показаны: HV ECU - блок управления; DC-DC конвертор; A/C
инвертор; преобразующее устройство для электрических двигателей MG1/MG2;
высоковольтная батарея.
.2 Режимы
движения гибридного автомобиля
Работа автомобиля в различных условиях движения.
Запуск двигателя.
Чтобы запустить двигатель, MG1 (связанный с солнечной шестерней)
вращается вперед, используя электроэнергию высоковольтной батареи. Если
автомобиль стоит, то коронная шестерня планетарного механизма будет также
оставаться неподвижной. Вращение солнечной шестерни поэтому вынуждает водило
сателлитов вращаться. Оно связано с двигателем внутреннего сгорания (ДВС) и
проворачивает его в 1/3,6 скорости вращения MG1. В отличие от обычного
автомобиля, который подает топливо и зажигание в ДВС, как только стартер
начинает его вращать, Prius ждет, пока MG1 не разгонит ДВС приблизительно до
1000 оборотов в минуту. Это случается меньше чем через секунду. MG1 значительно
более мощный, чем обычный двигатель стартера. Чтобы вращать ДВС с этой
скоростью, он сам должен вращаться со скоростью 3600 оборотов в минуту. Старт
ДВС на 1000 оборотов в минуту не создает почти никакого напряжения для него,
потому что это - скорость, на которой ДВС был бы счастлив работать от своей
собственной энергии. Кроме того, Prius запускается, зажигая только пару
цилиндров. Результат - очень гладкий запуск, свободный от шума и дергания,
который устраняет изнашивание, связанное с запусками двигателя обычных
автомобилей. При этом сразу обращу внимание на распространенную ошибку
ремонтников и владельцев: часто мне звонят и спрашивают, что мешает ДВС
продолжать работать, почему он заводится секунд на 40 и глохнет. На самом деле,
пока мигает рамочка READY - ДВС НЕ РАБОТАЕТ! Это его крутит MG1! Хотя зрительно
- полное ощущение запуска ДВС, т.е. ДВС шумит, из выхлопной трубы идет дым.
Как только ДВС начал работать от своей собственной энергии, компьютер
управляет открытием дросселя, чтобы получить подходящие холостые обороты в
течение разогрева. Электричество больше не питает MG1 и, фактически, если
батарея разряжена, MG1 может производить электричество и заряжать батарею.
Компьютер просто формирует MG1 как генератор вместо мотора, открывает дроссель
ДВС немного больше, (примерно до 1200 оборотов) и получает электричество.
Холодный запуск.
Когда Вы запускаете Prius с холодным двигателем, его главный приоритет
состоит в том, чтобы нагреть двигатель и каталитический нейтрализатор, чтобы
заработала система управления токсичностью выхлопа. Двигатель будет работать в
течение нескольких минут, пока это не случится (как долго - зависит от
фактической температуры двигателя и катализатора). В это время принимаются
специальные меры, чтобы управлять выхлопом во время прогрева, включая
сохранение выхлопных углеводородов в поглотителе, который будет очищен позже и
работой двигателя в специальном режиме.
Теплый запуск.
Когда Вы запускаете Prius с теплым двигателем, он будет работать в
течение короткого времени и затем останавливаться. Холостые обороты будут в
пределах 1000 об/мин.
К сожалению, невозможно препятствовать запуску ДВС, когда Вы включаете
автомобиль, даже если все, что Вы хотите сделать - переехать на соседний
подъемник. Это относится только к 10 и 11 кузовам. На 20 кузове применен другой
алгоритм запуска: нажимаете на тормоз и на кнопку "START". Если в ВВБ
достаточно энергии, и Вы не включите отопитель на обогрев салона или стекла -
ДВС не запустится. Просто загорится надпись
"READY"("Готов"), т.е. автомобиль ПОЛНОСТЬЮ готов к
движению. Достаточно переключить джойстик (а выбор режимов на 20 кузове
производится именно джойстиком) в положение D или R и отпустить тормоз, Вы
поедете!
Трогание с места Prius находится всегда на прямой передаче. Это означает,
что двигатель не может в одиночку выдать весь крутящий момент, чтобы автомобиль
энергично тронулся с места. Крутящий момент для начального ускорения
добавляется мотором MG2, вращающим непосредственно коронную шестерню
планетарного механизма, связанную с входом редуктора, выход которого связан с
колесами. Электрические двигатели развивают лучший крутящий момент на низкой
скорости вращения, поэтому идеально подходят для начала движения автомобиля.
Представим, что ДВС работает и автомобиль неподвижен, значит, мотор MG1
вращается вперед. Управляющая электроника начинает отбирать энергию с генератора
MG1 и передает ее на мотор MG2. Теперь, когда Вы отбираете энергию от
генератора, эта энергия должна откуда-нибудь взяться. Появляется некоторая
сила, которая замедляет вращение вала и нечто, вращающее вал, должно
сопротивляться этой силе, чтобы сохранить скорость. Сопротивляясь этой
"генераторной нагрузке", компьютер увеличивает обороты ДВС, чтобы
добавить дополнительной энергии. Итак, ДВС крутит водило сателлитов
планетарного механизма более сильно, а генератор MG1 пытается замедлить вращение
солнечной шестерни. Результат - сила на коронной шестерне, которая заставляет
ее вращаться и начинать двигаться автомобиль.
Вспомните, что в планетарном механизме крутящий момент ДВС делится в
соотношении 72% к 28% между короной и солнцем. Пока мы не нажали педаль
акселератора, ДВС только бездельничал и не производил никакого выходного
крутящего момента. Теперь, однако, обороты добавились и 28% крутящего момента
вращают MG1 как генератор. Другие 72% крутящего момента передаются механически
на коронную шестерню и, следовательно, на колеса. Одновременно с тем, что
большая часть крутящего момента поступает от мотора MG2, ДВС действительно
передает крутящий момент к колесам таким образом.
Теперь мы должны выяснить, как 28% крутящего момента ДВС, который
передается к генератору MG1, могут по возможности усилить старт автомобиля с
помощью мотора MG2. Чтобы сделать это, мы должны ясно различать крутящий момент
и энергию. Крутящий момент - это вращающая сила, и так же, как в случае с
прямолинейной силой, не требуется расходовать энергию на поддержание силы.
Предположим, что Вы тянете ведро воды с помощью лебедки. Она берет энергию.
Если лебедка вращается электромотором, вы должны были бы снабдить его
электроэнергией. Но, когда Вы подняли ведро наверх, Вы можете зацепить его
каким-нибудь крюком или стержнем или чем-нибудь еще, чтобы удержать его
наверху. Сила (вес ведра), которая приложена к веревке, и крутящий момент,
передаваемый веревкой барабану лебедки, не исчезла. Но потому, что сила не
перемещается, нет никакой передачи энергии, и ситуация устойчива без энергии.
Аналогично, когда автомобиль неподвижен, даже при том, что 72% крутящего
момента ДВС передают на колеса, нет никаких потоков энергии в этом направлении,
так как коронная шестерня не вращается. Солнечная шестерня, однако, вращается
быстро, и хотя она получает только 28% вращающего момента, это позволяет
произвести много электроэнергии. Подобная цепь рассуждений показывает, что
задача MG2 состоит в применении крутящего момента к входу механического
редуктора, не требующего большой мощности. Много тока должно пройти через
обмотки мотора, преодолевая электрическое сопротивление, и эта энергия теряется
в виде тепла. Но, когда автомобиль перемещается медленно, эта энергия идет от
MG1. Поскольку автомобиль начинает перемещаться и набирает скорость, генератор
MG1 вращается медленнее и производит меньше энергии. Однако компьютер может
немного прибавить обороты ДВС. Теперь больше крутящего момента прибывает от ДВС
и, поскольку больше крутящего момента должно также пройти через солнечную
шестерню, MG1 может поддержать генерирование энергии на высоком уровне.
Уменьшенная скорость вращения компенсируется увеличением момента.
Мы избегали упоминания о батарее до этого места, чтобы стало ясно, как
она не обязательна для приведения автомобиля в движение. Однако, большинство
троганий с места - результат действий компьютера, передающего энергию от
батареи непосредственно к мотору MG2.
Существуют предельные обороты ДВС, когда автомобиль движется медленно.
Они обусловлены необходимостью предотвратить повреждение MG1, которому придется
вращаться очень быстро. Это ограничивает количество энергии, производимой ДВС.
Кроме того, это было бы неприятным для водителя услышать, что ДВС слишком
увеличивает обороты для плавного трогания. Чем сильнее Вы нажимаете
акселератор, тем больше ДВС увеличит обороты, но также и больше энергии
поступит от батареи. Если утопить педаль в пол, приблизительно 40% энергии
поступают от батареи и 60% от ДВС при скорости около 40 км/ч. Поскольку
автомобиль ускоряется и одновременно обороты ДВС растут, он дает большую часть
энергии, достигая приблизительно 75% при 96 км/ч, если Вы все еще давите педаль
в пол. Как мы помним, энергия ДВС включает и то, что снято генератором MG1 и
передано в виде электричества к мотору MG2. При 96 км/ч MG2 фактически дает
больше крутящего момента, и, следовательно, больше мощности к колесам, чем
поставляется через планетарный механизм от ДВС. Но большая часть
электроэнергии, которую он использует, идет от MG1 и, следовательно, косвенно от
ДВС, а не от батареи.
Ускорение и езда в гору.
Когда требуется большая мощность, ДВС и MG2 совместно создают крутящий
момент, чтобы вести автомобиль почти таким же способом, как описано выше для
начала движения. Когда скорость автомобиля растет, уменьшается крутящий момент,
который MG2 в состоянии выдать, так как он начинает работать на пределе своей
мощности в 33 кВт. Чем быстрее он вращается, тем меньше крутящий момент он
может выдать на этой мощности. К счастью, это совместимо с ожиданиями водителя.
Когда обычный автомобиль ускоряется, ступенчатая коробка переключается на более
высокую передачу и вращающий момент на оси уменьшается так, чтобы двигатель мог
понизить свои обороты до безопасного значения. Хотя это делается с
использованием абсолютно разных механизмов, Prius дает такое же общее ощущение,
как и ускорение на обычном автомобиле. Главное различие - полное отсутствие
"дерганий" при переключении передач, потому что просто нет никакой
коробки передач.
Итак, ДВС вращает водило сателлитов планетарного механизма. 72% его
крутящего момента поступает механически через коронную шестерню к колесам. 28%
его крутящего момента поступают в генератор MG1 через солнечную шестерню, где
он превращается в электричество. Эта электрическая энергия питает мотор MG2, который
добавляет некоторый дополнительный крутящий момент на коронной шестерне. Чем
больше Вы нажимаете акселератор, тем больше крутящего момента производит ДВС.
Он увеличивает как механический крутящий момент через корону, так и количество
электроэнергии, произведенной генератором MG1 для мотора MG2, используемой,
чтобы добавить еще больше крутящего момента. В зависимости от различных
факторов - таких, как состояние заряда батареи, уклона дороги и особенно от
того, как сильно Вы нажимаете педаль, компьютер может направлять дополнительную
энергию от батареи к MG2, чтобы повысить его вклад. Вот так достигается
ускорение, достаточное для движения по шоссе такого большого автомобиля с ДВС
мощностью 78 л. с.
С другой стороны, если необходимая мощность не так высока, то часть
электричества, производимого MG1, может использоваться для зарядки батареи даже
при наборе скорости! Важно помнить, что ДВС и крутит колеса механически и
крутит генератор MG1, заставляя его производить электричество. Что происходит с
этим электричеством и добавляется ли еще электричество от батареи, зависит от
комплекса причин, которые мы не можем все учесть. Этим занимается контроллер
гибридной системы автомобиля.
Движение на умеренной скорости.
Как только Вы достигли устойчивой скорости на плоской дороге, мощность,
которая должна поставляться двигателем, расходуется на преодоление
аэродинамического сопротивления и трения качения. Это намного меньше, чем
мощность, необходимая для езды в гору или разгона автомобиля. Чтобы работать
эффективно на низкой мощности (и также не создавать много шума), ДВС работает с
низкими оборотами.
Следующая таблица показывает, какая мощность нужна для перемещения
автомобиля на различных скоростях на горизонтальной дороге и приблизительные
обороты.
Таблица 2.1 Распределение мощности на различных скоростях
|
Скорость автомобиля, км/ч
|
Необходимая для движени мощность, кВт
|
Обороты ДВС, об/мин
|
Обороты генератора MG1, об/мин
|
|
64
|
3,6
|
1300
|
-1470
|
|
80
|
5,9
|
1500
|
-2300
|
|
96
|
9,2
|
2250
|
-3600
|
Высокая скорость автомобиля и низкие обороты ДВС ставят устройство
распределения мощности в интересное положение: генератор MG1 должен теперь
вращаться назад, как видно из таблицы. Вращаясь назад, он заставляет сателлиты
вращаться вперед. Вращение сателлитов складывается с вращением водила (от ДВС)
и заставляет коронную шестерню вращаться намного быстрее. Еще раз отмечу, что
различие состоит в том, что в более раннем случае мы были рады с помощью
высоких оборотов ДВС получить большую мощность, даже передвигаясь с меньшей
скоростью. В новом случае мы хотим, чтобы ДВС остался на низких оборотах, даже
если мы разогнались до приличной скорости, чтобы установить более низкое
потребление мощности с высокой эффективностью.
Мы знаем из раздела про устройства распределения мощности, что генератор
MG1 должен проявить обратный крутящий момент на солнечной шестерне. Это как бы
точка опоры рычага, с помощью которого ДВС вращает коронную шестерню (а значит,
колеса). Без сопротивления MG1 ДВС просто вращал бы MG1 вместо того, чтобы
приводить в движение автомобиль. Когда MG1 вращался вперед, было легко видеть,
что этот обратный вращающий момент мог создаваться генераторной нагрузкой.
Следовательно, электроника инвертора должна была забирать энергию от MG1, и
тогда появлялся обратный крутящий момент. Но теперь MG1 вращается назад, и как
же нам добиться, чтобы он создавал этот обратный крутящий момент? Хорошо, как
мы сделали бы, чтобы MG1 вращался вперед и производил прямой крутящий момент?
Если бы работал как мотор! Все наоборот: если MG1 вращается назад, и мы хотим получить
крутящий момент в том же самом направлении, MG1 должен быть двигателем и
вращаться, используя электроэнергию, поставляемую инвертором.
Движение накатом.
Когда Вы снимаете ногу с педали акселератора, можно сказать, что Вы
движетесь "накатом". Двигатель не пытается толкать автомобиль вперед.
Автомобиль постепенно замедляется вследствие трения качения и аэродинамического
сопротивления. В обычном автомобиле двигатель все еще связан с колесами
трансмиссией. Двигатель проворачивается без топлива и поэтому также замедляет
автомобиль. Это называют "торможение двигателем". Хотя нет никакой
причины для того, чтобы это происходило в Prius, Toyota решила дать автомобилю
такие же ощущения, как на обычном автомобиле, имитируя торможение двигателем.
Когда Вы движетесь накатом, автомобиль замедляется быстрее, чем если бы на него
действовали только сопротивление качения и аэродинамическое сопротивление.
Чтобы производить эту дополнительную замедляющую силу, MG2 включается как
генератор и заряжает батарею. Его генераторная нагрузка имитирует торможение
двигателем.
Поскольку двигатель не нужен, чтобы автомобиль ехал, он может
остановиться. Водило сателлитов остановлено, а коронная шестерня все еще
вращается. MG2, помните, соединен непосредственно с коронной шестерней. Сателлиты
вращаются вперед, и MG1 вращается назад. Энергия не производится и не
потребляется MG1; он просто свободно вращается.
Однако мы знаем, что MG1 вращается назад в 2,6 раза быстрее, чем коронная
шестерня и MG2 вращаются вперед. Эта ситуация не безопасна, когда автомобиль
едет на высокой скорости. При скорости 67 км/ч и выше, если оставить водило
сателлитов неподвижным, то MG1 будет вращаться назад более 6500 об/мин.
Поэтому, чтобы так не случилось, компьютер включает MG1 как генератор и
начинает снимать энергию. Генераторная нагрузка предотвращает превышение
оборотов MG1, и вместо этого водило сателлитов начинает вращаться вперед. При
вращении водила сателлитов и ДВС на 1000 об/мин MG1 защищен на скоростях до 104
км/ч. На более высоких скоростях водило сателлитов и ДВС должны вращаться
быстрее. Электроэнергия, произведенная MG1 в этом режиме, может использоваться,
чтобы зарядить батарею.
Торможение.
Когда Вы хотите замедлить автомобиль более быстро, чем при свободном
выбеге (движении накатом) - от сопротивления качения, аэродинамического
сопротивления и торможения двигателем, Вы нажимаете на педаль тормоза. В
обычном автомобиле это давление передается гидравлическим контуром на
фрикционные тормоза в колесах. Тормозные колодки прижимаются к металлическим дискам
или барабанам, и энергия движения автомобиля преобразовывается в тепло и
автомобиль замедляется. Prius имеет точно такие же тормоза, но он имеет кое-что
еще - регенеративное торможение. Принимая во внимание, что обычно двигатель
остановлен в режиме торможения, в режиме "B" компьютер и
моторы/генераторы устраивают так, чтобы вращать ДВС без топлива и с почти
закрытым дросселем. Сопротивление, которое он создает, замедляет автомобиль,
уменьшая нагрев тормозов, и позволяет Вам ослабить нажатие на педаль тормоза.
Режим электромобиля и старт на электричестве.
Обычный автомобиль с автоматической передачей тронется с места, если Вы
снимете ногу с педали тормоза. Это побочный эффект работы гидротрансформатора,
но он выгодно препятствует автомобилю катиться назад на подъеме, в то время как
Вы переносите вашу ногу на педаль акселератора. Говорят, что машина
"ползет". Как и с торможением двигателем, нет никакой причины, почему
Prius должен вести себя таким образом, за исключением того, что Toyota хочет,
чтобы водители испытывали знакомые ощущения. Поэтому "ползание" также
имитируется. Небольшое количество энергии из батареи передается мотору MG2,
когда Вы отпускаете тормоз. Она мягко отправляет автомобиль вперед.
Если Вы немного нажмете на акселератор, поступающая к мотору MG2 энергия
будет увеличена, и автомобиль продвинется более резво. Так как MG2 весьма мощен
и имеет высокий крутящий момент, Вы можете стартовать только на электроэнергии
до порядочной скорости, пока дорожное движение позволяет Вам мягко ускоряться.
Чем больше вы придавливаете акселератор, тем скорее ДВС запустится и начнет
помогать Вам своим крутящим моментом и электричеством, произведенным
генератором MG1.
Если Вы нажмете педаль до пола, то ДВС заведется сразу же, хотя Вы
покинете линию прежде, чем он поможет ускорению и внесет большую энергию. Но,
для большинства стартов внутри города, Вы отъедете от линии почти в полной
тишине, используя только мотор MG2, запитанный от батареи. ДВС остается
выключенным, и MG1 свободно вращается назад.
Медленное движение и "режим электромобиля" ("режим
EV").
Выше я описал, как автомобиль поедет с использованием только
электроэнергии и мотора MG2, если Вы не будете нажимать сильно на педаль
акселератора. Если Вы достигаете желаемой скорости прежде, чем ДВС заведется,
можете продолжить езду, используя только электроэнергию. Это называют
"режимом электромобиля" ("EV mode"), так как автомобиль
питается точно тем же самым способом, как настоящий электромобиль EV. Вращается
коронная шестерня, поскольку MG2 приводит автомобиль в действие, водило
сателлитов и ДВС остановились, солнечная шестерня и MG1 свободно вращаются
назад.
Даже если ДВС запустился во время ускорения, когда Вы достигли скорости и
уменьшили давление на педаль, энергия, необходимая для поддержания движения,
может упасть до уровня, который может легко обеспечить мотор MG2. ДВС тогда
выключится, и Вы окажетесь в режиме электромобиля. Трудно предсказать, когда
это случится, поскольку это зависит от различных факторов - насколько заряжена
батарея и других обстоятельств движения. Способ, которым ДВС запускается в
режиме электромобиля, когда это становится необходимым, подобен теплому
запуску, но корона и солнечная шестерня в этом случае не неподвижны. Солнечная
шестерня вращается назад и должна сначала замедлиться. Этого может быть
достаточно, чтобы разогнать ДВС до стартовой скорости в зависимости от скорости
автомобиля, а солнцу, возможно, придется изменить направление и начать
вращаться вперед. Чтобы замедлить солнечную шестерню, MG1 сначала работает в
режиме генератора, и энергия снимается. Однако, поскольку скорость MG1
понижается близко к нулю, он должен быть включен как мотор для вращения вперед
и запитан энергией так, чтобы быстро сменить направление вращения, пройти
нулевую точку и начать вращаться вперед. В результате, как и в случае старта
двигателя в стоящем автомобиле, водило сателлитов, а с ним и ДВС, вращаются
вперед. Коронная шестерня планетарного механизма, вращающаяся вперед в
автомобиле, получающем энергию от MG2, помогает разогнать ДВС до стартовой
скорости при более низкой скорости MG1. Однако старт ДВС создает сопротивление
свободному вращению коронной шестерни. Чтобы этот рывок не почувствовали
водитель и пассажиры, не говоря уже о кофе в держателе чашки, на MG2 подается
дополнительный импульс энергии для получения дополнительного крутящего момента,
необходимого для запуска ДВС.
Замедление и движение под уклон.
Когда Вы мягко замедляетесь или спускаетесь под уклон, необходимая для
движения энергия уменьшается, потому что инерция или гравитация помогает Вам
двигаться вперед. Поэтому Вы немного уменьшаете давление на педаль
акселератора. Если Вы немного замедляетесь или быстро спускаетесь с небольшой
горки, мощность ДВС и обороты несколько уменьшаются, но это трудно заметить.
Для большего замедления или на более крутом спуске, в зависимости от скорости,
ДВС может прекратить давать энергию вообще, если MG2 может поставлять то, что
необходимо. Я уже описывал, как при медленном движении мотор MG2 может
поставлять всю необходимую энергию при остановленном ДВС. Ускоряясь и двигаясь
на постоянной скорости горизонтально, режим электромобиля вряд ли возможен на
скоростях выше 64 км/ч, потому что потребности в мощности, необходимой для
преодоления аэродинамического сопротивления, достаточно, чтобы заставить ДВС
включиться. Режим EV на более высоких скоростях может произойти, однако, при
некоторых условиях и, весьма вероятно, произойдет при замедлении или быстрого
спуска под гору. Чтобы работать в режиме электромобиля на скорости 67 км/ч и
выше, автомобиль должен защитить MG1 от очень высоких оборотов так же, как при
движении накатом. Единственное различие состоит в том, что коронная шестерня
приводится в движение не движением автомобиля, а мотором MG2.
Задний ход.не имеет никаких шестерен заднего хода, который позволил бы
автомобилю двигаться задним ходом с помощью ДВС. Поэтому он может перемещаться
назад только с помощью электромотора MG2.
ДВС не может помочь напрямую. В большинстве случаев автомобиль остановит
ДВС, когда Вы установите рычаг выбора режима в положение "R".
Поскольку MG2 вращает вход редуктора назад, коронная шестерня планетарного
механизма также будет вращаться назад. ДВС неподвижен, значит, и водило
сателлитов также неподвижно. Это просто означает, что MG1 будет вращаться
вперед. Он вращается свободно, не потребляя или не производя энергию. Это
похоже на режим EV, но наоборот. Компьютер не позволит ехать назад с такой
скоростью, чтобы MG1 вращался слишком быстро.
Если ДВС продолжает работать, когда рычаг выбора режима находится в
положении R, например, если величина заряда батареи низка, то MG2 все еще
просто ведет автомобиль назад как прежде. Единственное различие - водило
сателлитов вращается вперед, солнечная шестерня и MG1 вращаются более быстро
вперед, и компьютер должен ограничить заднюю скорость автомобиля на более
низком значении, чтобы защитить MG1 от слишком большой скорости вращения.
Энергия может быть взята от генератора MG1, чтобы питать MG2 и заряжать
батарею.
.3 Алгоритм
режимов движения
Рисунок
2.16 - Алгоритм режимов движения
.
Моделирование гибридной установки в SIMULINK
Для моделирования последовательно-параллельной гибридной схема была
выбрана программа SIMULINK пакета MATLAB.
В состав модели гибридной установки входят:
ДВС;
электрический двигатель
планетарная передача;
контролер;
генератор;
высоковольтная батарея
DC-DC конвертер;
динамика автомобиля.
Двигатель внутреннего сгорания.
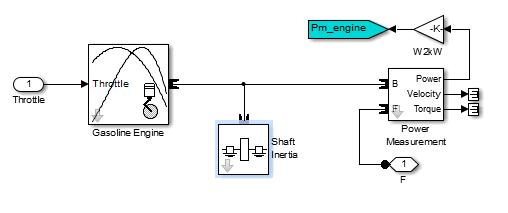
Рисунок - 3.1 Модель двигателя внутреннего сгорания
Для модели был выбран четырех цилиндровый двигатель объемом 1.5 л. и
мощностью 76 л.с.. работающий по принципу Аткинсона.
Электрический мотор MG2.

Рисунок 3.2 - Модель электрического двигателя MG2
Электрический двигатель - трехфазный, переменного тока, обладает
мощностью 50 кВ. Он является основным тяговым электромотором в данной модели.
Планетарная передача.

Рисунок 3.3 - Модель планетарной передачи
А качестве трансмиссии был выбран Делитель мощности (Power Split Device
(PSD). Основным компонентом трансмиссии автомобиля является планетарный
механизм, который используется как делитель мощности "Power Split
Device".
Этот механизм называется планетарным, поскольку имеет несколько
расположенных по кругу (сателитных) шестерней, вращающихся вокруг центральной
шестерни, называемой солнечной. Сателитные шестерни свободно вращаются на осях,
закреплённых на водиле сателитных шестерней, которое также вращается вокруг
общей оси планетарного механизма, вокруг которой вращается и солнечная
шестерня.
Контроллер.
Рисунок 3.4 - модель контроллера
Представляет из себя систему распределения мощности. Состоит из
контроллера скорости электродвигателя и контроллера заряда батареи.
Генератор.

Рисунок 3.5 - модель генератора MG1
В качестве модели выл выбран генератор мощностью 18 кВ. Генератор MG1
используется так же в качестве стартера. Во время работы двигателя, контроллер
генератора используется для управления зарядом высоковольтной батареи.
Генератор может рекуперировать энергию во время торможения.
Высоковольтная батарея.

Рисунок 3.6 - Модель высоковольтной батареи
Емкость аккумулятора составляет 200 Ач, напряжение 200 В, максимальный
ток 80 А. Для использования в инверторе напряжение батареи повышается до 500 В
с помощью специального устройства - booster.DC конвертер.

Рисунок 3.7 - Модель конвертера DC-DC
В качестве преобразователя был выбран DC-DC конвертер, который
преобразует с 200 В в 12 В.
Была собрана итоговая модель гибридной последовательно-параллельной
установки. Были внесены данные соответствующие нашим компонентам.

Рисунок 3.8 - Модель последовательно-параллельной гибридной установки
Для наглядной демонстрации распределения мощности была задействована
команда Scopes
Через операцию Scopes выводится два графика. На первом графике выводится
скорость автомобиля в км/ч. На второй выводится кривая мощности выдаваемой
высоковольтной батареей.
Выводимые результаты показывают зависимость вырабатываемой мощности от
скорости автомобиля. Тестируются режимы ускорения, крейсерской скорости и
замедления.

Рисунок 3.9 - Графики выводимые командой scopes
Из рисунка 3.9 видно какую мощность выдает высоковольтная батарея в
зависимости от режима движения.
. Технико-экономическое обоснование проекта
Данная система управления движением гибридного автомобиля в значительной
мере снижает вредные выбросы углекислого газа и позволяет более рационально
использовать запас хода автомобиля. Современные гибридные автомобили оснащены
современными системами управления движением, но все равно расходуют много
полезной энергии в пустую. Данная система управления гибридного автомобиля
позволяет максимально экономить энергию, а так же рекуперировать энергию
обратно в систему.
.1 Анализ соотношения затрат и прибыли
Предпринимателю в процессе деятельности постоянно приходиться принимать
решения о цене, по которой продукция будет реализована, о переменных и
постоянных издержках, о приобретении и использовании ресурсов. Для этого
необходимо точно и достоверно организовать уровни затрат и прибыли.
Все предпринимаемые в условиях рынка управленческие модели основаны на
изучении взаимосвязи затрат, объема производства и прибыли. Специальный анализ
помогает понять взаимоотношения между ценой изделия, объемом производства,
переменными и постоянными затратами. Он позволяет сравнить различные варианты
цен на продукцию и получение прибыли, а также отыскать наиболее выгодное
соотношение между переменными, постоянными затратами, ценой и объемом производства
продукции. Достичь этого можно разными способами:
снизить цену продаж и соответственно увеличить объем реализации;
увеличить постоянные затраты и увеличить объем;
пропорционально изменять переменные, постоянные затраты, и объем выпуска
продукции. Иногда анализ соотношения затрат, объема производства и прибыли
(CVP- анализ, Cost-Volume-Profit) трактуют более узко, как анализ критической
точки.
Под критической понимается та точка объема производства, в которой
затраты равны выручке от реализации всей продукции, т.е. где нет ни прибыли ни
убытков. Эту точку называют также «мертвой», или точкой безубыточности.
Для ее вычисления можно использовать три метода: уравнения, маржинальной
прибыли и графического изображения.
Метод уравнения.
В качестве исходного уравнения для анализа принимают следующее
соотношение выручки, издержек и прибыли:
Выручка - переменные затраты - постоянные затраты - прибыль.
Если выручку представить как произведение цены продажи единицы изделия и
количества проданных единиц, а затраты пересчитать на единицу изделия, то в
точке критического объема производства будем иметь:

Где
QKP- объем производства продукции в критической точке (количество единиц);
Р
- цена единицы продукции;удельные переменные затраты на единицу
продукции;постоянные расходы.
Из
формулы (6.1) определяем количество единиц продукции, которое необходимо
продать, чтобы достигнуть критической точки:
Метод
маржинальной прибыли представляет собой модификацию метода уравнений.
Маржинальная
прибыль - это разность между выручкой от реализации продукции и переменными
затратами, т.е. это определенная сумма средств, необходимая, в первую очередь,
для покрытия постоянных затрат и получения прибыли предприятия. Маржинальная
прибыль, приходящаяся на единицу продукции, представляет вклад каждой проданной
единицы в покрытие постоянных затрат.
Преобразование
формулы раскрывает связь объема продукции и относительного маржинального
дохода:
Где
d- относительный уровень удельных переменных расходов в цене продукта (d =
VC/P);
(1
- d) - относительная маржинальная прибыль на единицу объема реализации.
.2
Расчет затрат на этапе проектирования
Предпринимателю
в процессе деятельности постоянно приходиться принимать решения о цене, по
которой изделие будет реализовано, о переменных и постоянных издержках, о
приобретении и использовании ресурсов. Для этого необходимо точно и достоверно
определить затраты и прибыль и объем производства.
Под
проектированием будем понимать совокупность работ, которые необходимо
выполнить, чтобы спроектировать блок управления движением гибридного
автомобиля.
Для
расчета затрат на этапе проектирования необходимо определить продолжительность
каждой работы. Продолжительность работ определяется либо по нормативам (при
этом пользуются специальными справочниками), либо рассчитывают их по экспертным
оценкам по формуле:
= =
=
Где,
tmin , tmax- наименьшая и наибольшая, соответственно, по мнению экспертов,
длительность работ. Все расчёты сводим в таблицу 4.1
Таблица
4.1 Список выполняемых работ
|
Наименование работы
|
Длительность работ, часов
|
|
tmin
|
Tmax
|
T0
|
|
1. Разработка ТЗ
|
2
|
3
|
2,5
|
|
2. Анализ ТЗ
|
2
|
4
|
3
|
|
3. Разработка алгоритма работы
|
4
|
7
|
5,5
|
|
4. Разработка схем
|
8
|
9
|
8,5
|
|
5. Разработка программного продукта
|
5
|
8
|
6,5
|
|
6. Отладка программы
|
2
|
4
|
3
|
|
7. Разработка конструкции
|
3
|
4
|
3,4
|
|
8. Испытание
|
4
|
6
|
4,8
|
|
9.Корректировка
|
3
|
5
|
3,8
|
|
10. Разработка сопроводительной документации
|
4
|
6
|
4,8
|
|
11. Оценка безопасности и экологичности проекта
|
3
|
5
|
3,8
|
|
12. Технико - экономическое обоснование проекта
|
4
|
6
|
4,8
|
|
13.Оформление пояснительной записки
|
6
|
8
|
6,5
|
|
Суммарное количество времени, ч.
|
70
|
75
|
74
|
На основании таблицы можно построить ленточный график выполнения работ
(рисунок 4.1):

Рисунок 4.1 - Ленточный график выполнения работ
Для расчета стоимости проекта необходимо определить:
) затраты на оборудование;
) основную заработную плату;
) дополнительную заработную плату;
) налоги;
) накладные расходы.
Основная заработная плата производственных рабочих на одно изделие
исчисляется исходя из трудоемкости изготовления, применяемой тарифной сетки и
часовых тарифных ставок (таблица 4.1).
Из таблицы 4.1 видно, что основная заработная плата, то есть сумма
расходов на этапе подготовки производства составит 5952рубля.
Рассчитаем сумму дополнительной заработной платы из расчета 15,2% от
основной заработной платы, получим:
Здоп=0,152*5952=892,8руб.
Отчисления на социальные нужды - 30% от суммы основной и дополнительной
заработных плат
Зс.нуж=0,30*5952= 1785,6 руб.
Таблица 4.2 - Расчет основной заработной платы на проектирование нового
устройства
|
Наименование работ
|
Разряд, должность
|
Время (час)
|
Ставка (в час, руб.)
|
Сумма, руб.
|
|
Разработка ТЗ
|
Ведущий инженер
|
18
|
27
|
486
|
|
Анализ ТЗ
|
Ст. инженер
|
21
|
21
|
441
|
|
Разработка структуры устройства
|
Инженер
|
46
|
16
|
736
|
|
Разработка схем
|
Инженер
|
55
|
16
|
880
|
|
Разработка схем монтажных
|
Инженер
|
42
|
16
|
672
|
|
Разработка ТД
|
Инженер
|
37
|
16
|
592
|
|
Разработка КД
|
Инженер
|
34
|
16
|
544
|
|
Согласование с заказчиком
|
Инженер
|
31
|
16
|
496
|
|
Корректировка
|
Инженер
|
36
|
16
|
576
|
|
Разработка ЭД
|
Инженер
|
23
|
23
|
529
|
|
Итого 5952
|
Рассчитаем накладные расходы (таблица 5). Норматив на накладные расходы
составляет от 100 до 200% от суммы основной заработной платы разработчиков.
Допустим, что накладные расходы составят 108%.
Инак=1.08*5952=7142,4 руб.
Таблица 4.3- Калькуляция на проектирование
|
Вид затрат
|
Сумма, руб.
|
|
Основная заработная плата (ОЗП)
|
5952,0
|
|
Дополнительная ЗП (ДЗП) разработчиков -10% от ОЗП
|
892,8
|
|
Отчисления на социальные нужды - 30% от ОЗП
|
1785,6
|
|
Накладные расходы (Н) - 108% от ОЗП
|
6451,4
|
|
ИТОГО ( ):15081,8 ):15081,8
|
|
Как
видно из таблицы 5, затраты на проектирование составляют
=15081,8 рублей.
.3 Расчет
стоимости материалов и комплектующих системы
В таблице 6 представлены материалы и комплектующие для изготовления
устройства.
Таблица 4.4 - Материалы и комплектующие
|
Наименование статьи калькуляции
|
Сумма, руб.
|
|
1 Сырье и материалы
|
100,00
|
|
2 Кабель коаксиальный
|
50,00
|
|
3 Комплектующие (диоды 45х3=135,00руб, плата50,00руб,
конденсаторы 3х30руб=90 руб, резисторы 9х2руб=18 руб, разъемы
3х20,33руб=60,99руб)
|
232
|
|
4 Микросхема UC3845
|
50
|
|
5 Микроконтроллер Atmega8
|
80,00
|
|
6 Трансформатор
|
300,00
|
|
7 Микросхема (стабилизатор напряжения)
|
30,00
|
|
8 Конденсаторы электролитические 8х100
|
800,00
|
|
Итого, прямые материальные затраты:
|
1642,00
|
4.4 Расчет
себестоимости и рыночной цены
Исходя из назначения и области применения разработки, определим величину
закладываемой прибыли в размере 70 % к сумме основной и дополнительной
заработной плате (таблица 4.2).
Таблица 4.5 - Калькуляция себестоимости
|
Статья расходов
|
Сумма тыс. руб.
|
|
1 Материалы и оборудование
|
22000,00
|
|
2 Основная зарплата (ОЗ)
|
19000,00
|
|
3 Дополнительная зарплата (ДЗ) 15,4 %
|
2926,00
|
|
4 Социальное страхование (ОЗ) × 30 % : 100 %
|
6460,00
|
|
5 Накладные расходы 55,86 % (ОЗ)
|
10614,00
|
|
6 Себестоимость
|
61000,00
|
|
7 Прибыль 10 % × (ОЗ) :
|
1900,00
|
|
8 Цена
|
62900,00
|
|
9 НДС (18 %* цену)
|
11322,00
|
|
Стоимость
|
74222,00
|
Так как в стоимость системы входят покупные изделия и по ним платиться
НДС 3960,00, фактический НДС к оплате определяем в цене за вычетом уже
уплаченного НДС по приобретенным материалам и комплектующим.
В таблице 4.6 представлена калькуляция возможной рыночной цены.
Полученное расчетное значение рыночной цены (таблица 4.6) соответствует оценкам
экспертов, так же структура цены разработки аналогична усредненной по отрасли.
Таблица 4.6 -Рыночная цена системы
|
Наименование статьи калькуляции
|
Сумма, руб.
|
|
Полная себестоимость
|
61000,00
|
|
Закладываемая прибыль
|
1900,00
|
|
Итого, продажная цена без НДС
|
62900,00
|
|
НДС, (11322,00- 3960,00) за вычетом уплаченного НДС по
приобретенным материалам и комплектующим табл. (18%)
|
7362,00
|
|
Итого, рыночная цена с НДС
|
70262,00
|
4.5
Графический метод CVP-анализа
Графический метод дает наглядное представление о
CVP-анализе.
В прямоугольной системе координат строится график
зависимости затрат и дохода от количества единиц произведенной продукции
(рисунок 4.2).
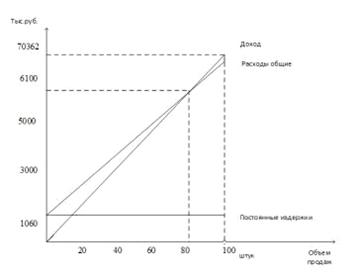
Рисунок 4.2 - График затрат, прибыли и объема продаж
По вертикали откладываются данные об издержках и доходе, по горизонтали -
количество единиц продукции. Порядок построения графика следующий:
Что бы нанести на график линию переменных расходов, выбираем любой объем,
предположим, 100 ед. и находим точку расходов, соответствующую этому объему:
61000,00•100 =6,10 млн.руб. проводим линию переменных расходов через точки 0 и
А;
) Что бы нанести линию постоянных расходов, отметим на оси ординат точку
соответствующую 10614,00х100=1,06 млнруб., а от точки 0 вверх отложим 1,06млн.
руб. Проводим линию расходов параллельно линии переменных расходов. Эта линия
показывает общую сумму затрат.
Чтобы
нанести на график линию выручки, возьмем тот же условный объем продаж (100
ед.). Отметим точку, полученную от умножения цены единицы продукции на объем
(70262,00руб • 100шт = 7,03млн.руб). Проводим линию выручки через точки 0 и
7036тыс. руб.
Критическая
точка (точка перелома) образуется в месте пересечения линии выручки ОД и линии
валовых (совокупных) издержек ВС. В точке критического объема производства К
нет прибыли и нет убытка.
Слева
от критической точки заштрихована область чистых убытков, которая образуется в
результате превышения величины постоянных издержек над величиной маржинальной
прибыли. Справа от нее заштрихована область чистых прибылей. Для каждого
значения количества единиц продукции чистая прибыль определяется как разность между
величиной маржинальной прибыли и постоянных издержек.
Проекция
точки К на ось абсцисс дает критический объем производства в физических
единицах измерения (80шт.). Проекция точки К на ось ординат дает критический
объем производства в стоимостном измерении (6млн. руб).
Приведенная
графическая зависимость затрат, прибыли и объема продаж позволяет сделать
важные для предприятия выводы:
предприятие
может получить прибыль (выручка за минусом постоянных и переменных издержек)
лишь при условии реализации продукции большего объема, чем критическая точка
К=80 штук;
точка
К, находящаяся на пересечении кривой валовых издержек и кривой выручки от
реализации, называется критической точкой, при переходе через которую наступает
окупаемость всех издержек и предприятие начинает получать прибыль;
точка
пересечения кривой постоянных издержек и кривой маржинального дохода показывает
тот объем производства, после прохождения, которого наступает окупаемость
постоянных затрат;
с
повышением цен на производимую продукцию минимальный объем производства,
который соответствует критической точке, уменьшается, а при снижении цены -
возрастает;
с
увеличением постоянных расходов минимальный объем производства, соответствующий
точке безубыточности, повышается;
сохранение
безубыточного объема производства при росте переменных расходов возможно при
прочих равных условиях за счет увеличения минимального объема производства.
При
проведении CVP-анализа условно принимается целый ряд допусков, которые
ограничивают точность и надежность результатов анализа: объем производства
равен объему продаж; цена за единицу продаваемого товара, а также доли
переменных и постоянных издержек остаются неизменными; производится
единственный вид изделия.
В
заключении следует отметить, что СVР - анализ (анализ критической точки)
отражает взаимосвязь затрат, объёма производства и прибыли, позволяющий
сравнить различные варианты цен на продукцию и получение прибыли
.
Безопасность и экологичность проекта
.1 Системный
анализ надёжности и безопасности системы
Для повышения безопасности и надёжности (безотказности) работы
разрабатываемого устройства необходимо эффективным образом проанализировать
возможные аварийные ситуации и причины их вызывающие. И, как следствие, принять
меры по предотвращению таковых.
Отказы разрабатываемого устройства носят стохастический характер, т.е.
они могут проявиться или не проявиться. Поэтому в качестве адекватной оценки
риска можно применять вероятность наступления нежелательного события,
определяемую статистически.
Как пример ситуации отказа устройства управления УБП, возьмем случай
выхода его из строя при использовании в системе обработки сигналов. При отказе
устройства необходимая информация не будет поступать на микропроцессор, что в
свою очередь приведет к необходимости повтора эксперимента.
Поскольку данная система представляет собой устройство обработки сигнала,
очевидно, что наиболее неблагоприятной с точки зрения работоспособности будет
ситуация отсутствия или искаженности информации. Причинами такого события могут
быть как внешние, мало зависящие от нас, так и неисправности электрических схем
самого устройства. Эти группы событий выделены ввиду резкого отличия причин,
приводящих к их возникновению.
Исходя из вышеизложенного, в качестве головного события для анализа
надёжности и безопасности разрабатываемого проекта рассмотрим событие «не
работает блок управления гибридного автомобиля». Причины отказа блока
управления гибридным автомобилем:
нет напряжения питания
повреждение платы устройства
сбой работы микроконтроллера
Отсутствие напряжения питания может произойти по нескольким причинам.
) Если сгорел предохранитель, в таком случае нужно его заменить,
предварительно устранив причину выхода из строя предохранителя, которой может
быть короткое замыкание электропроводки или неисправность стабилизатора
напряжения.
) Если предохранитель находится в рабочем состоянии, а питания всё равно
нет, тогда возможен обрыв токоведущих проводов, который может быть вызван
химическим воздействием (окисление проводов), термическим или механическим
воздействием. В данном случае нужно восстановить целостность проводки путём
пайки, при этом нужно также восстановить изоляцию в случае её разрушения во
избежание короткого замыкания, либо замены оборванных проводов.
) Если с проводкой всё в порядке, а устройство не включается, значит,
имеются повреждения платы блока управления. Это может произойти при
механическом воздействие на элементы, или выход из строя самих элементов платы
при нарушениях правил эксплуатации прибора, перегрев элементов из-за
естественного старения или нарушения температурного режима. Необходимо заменить
вышедшие из строя детали на новые.
Повреждение платы устройства может произойти по причинам.
) Если было механическое воздействие на плату, в таком случае назначается
осмотр и дальнейшее выявление проблемы.
) Если механического воздействия не было, а плата находится в нерабочем
состоянии, тогда возможен выход из строя элементов платы вызванный или
механическим воздействием, или перегревом.
) Если механическое воздействие отсутствовало, то причиной отказа
устройство является перегрев, вызванный либо нарушением температурного режима,
либо естественным старением элементов схемы.
Сбой работы микроконтроллера может произойти:
) микроконтроллер может выйти из строя, если два или более вывода «ножки»
каким-либо образом замкнуть (при условии, что эти выводы «ножки», программно
задействованы как входы, либо на них подан сигнал от датчиков, или питание);
) еще одной причиной может служить механическое воздействие на сам
микроконтроллер. Чтобы не допустить этого, нужно располагать микроконтроллер в
отдаленных от нагрузок местах.
) микроконтроллер может выйти из строя если на него подать питающее
напряжение больше положенного напряжения, это может произойти в случае
замыкания проводов, а также при подключении программатора, в том случае, когда
прибор подключён к бортовой сети автомобиля. Чтобы не допустить этого
рекомендуется отключать устройство от бортовой сети.

Рисунок 5.1 - Дерево причин отказов
К дефектам, которые могут возникнуть в процессе сборки, относятся: удар,
перегрев, обрыв, электрический пробой статическим электричеством и другие. К
нарушениям правил эксплуатации относятся: несоответствие температурного режима,
несоответствие климатической зоне, неноминальное питающее напряжение и т.п.
Необходимо также добавить сюда отсутствие сигнала на входе устройства
парковкой автомобиля, что в свою очередь может быть вызвано, к примеру,
отсутствием объекта наблюдения, то есть отказом датчика.
Результаты анализа возможных источников отказа устройства представлены в
виде "дерева причин отказов" на рисунке 5.1
5.2
Разработка мероприятий по повышению надежности и безопасности
На основе выше изложенного при разработке, установке и эксплуатации
устройства необходимо выполнять следующие мероприятия по повышению надежности
разрабатываемой системы.
Рассматривая опасность выхода из строя элементов УБП из-за их перегрева,
надо предусмотреть не только охлаждение устройства в условиях естественной
конвекции и применением теплоотводов на функциональных узлах, но и выбрать
такую элементную базу, которая бы выдерживала значительные перепады температур,
особенно с ее повышением в более жарких регионах.
Для защиты от перепада напряжения необходимо воспользоваться сетевым
фильтром и стабилизатором питающего напряжения с защитой от короткого
замыкания, также необходимо предусмотреть наличие плавкого или
самовосстанавливающегося предохранителя в цепи питания.
Неисправности, причинами которых является обрыв сетевого кабеля можно
устранить путем прокладки данного кабеля в местах, где может присутствовать
механическое воздействие местах таким образом, чтобы минимизировать возможность
механических повреждений (изгиб, натяжение), например в полу автомобиля.
Такая ситуация как отсутствие питающего напряжения предотвращается
регулярной проверкой состояния проводов питания, проведением технического
осмотра УБП, а также слежением за исправностью электропроводки.
Организационные мероприятия. Персонал для работы над сборкой, монтажом и
наладкой блока управления готовится специально. К работе могут быть допущены
лица, достигшие 18-летнего возраста, прошедшие медицинскую комиссию и имеющие
удостоверение на право производства работ. Для персонала, непосредственно
работающего в электроустановках, производится повторная проверка знаний раз в
год.
Для безопасности работ в электроустановках осуществляются организационные
мероприятия. Организационными мероприятиями являются:
допуск рабочих, квалификационная группа которых не ниже 3;
инструктаж по технике безопасности;
оформление перерывов в работе, переводов на другое рабочее место,
окончания работы.
Гигиенические мероприятия. На рабочих местах большое значение отводится
созданию комфортных условий труда, которые обеспечиваются параметрами
микроклимата и степенью запыленности воздуха.
Местная вытяжная вентиляция предназначена для удаления воздуха
непосредственно от мест образования или выхода вредных выделений, приточная -
для подачи воздуха на определенные рабочие места или участки
Светотехнические условия являются важнейшим фактором при работах,
требующих зрительного напряжения. Выполняемые в лаборатории работы относятся к
III разряду зрительных работ (размер объекта 2-4 мм). Согласно требованиям СНиП
23-05-95 необходимая освещенность рабочего места для III разряда зрительных
работ должна составлять не менее 300 лк. При работе в дневное время суток
используется естественное боковое освещение, т.е. через светопроёмы (окна) в
наружных стенах. Свет в лаборатории проникает через оконные проемы общей
площадью 6м2. В
В вечернее время используется система общего искусственного освещения,
состоящая из шести светильников типа ШОД с лампами ЛБ-80 и ЛДЦ-80, размещенных
в два ряда группами по четыре лампы на высоте 3,5 м от пола.
Так как работы производятся в основном в светлое время суток, то
рассмотрим естественное освещение помещения лаборатории.
Естественное освещение характеризуется коэффициентом естественной
освещенности (КЕО) (е), который представляет собой отношение освещенности
естественным светом какой-нибудь точки внутри помещения к значению наружной
освещенности горизонтальной поверхности, освещаемой светом полностью открытого
небосвода и выражается в процентах:
е = (Евн/Енар)*100 %;
где Евн - освещенность какой-либо точки внутри помещения;
Енар - освещенность точки вне помещения.
Чтобы снизить утомление глаз рекомендуется после каждого часа работы
делать десятиминутный перерыв.
5.3 Пожарная
безопасность при производстве и монтаже устройства
При монтаже и настройке устройств используются различные электрические
приборы. При их не правильной эксплуатации появляется опасность возникновения
чрезвычайной ситуации. В процессе работы с устройством существует опасность
возникновения пожара. Причины пожара могут быть электрического и
неэлектрического характера. К причинам электрического характера относятся:
) искрение в электрических устройствах;
) токи коротких замыканий, нагревающие проводники до высокой
температуры, при которой может возникнуть воспламенение их изоляции, а также
значительные электрические перегрузки проводов и обмоток электрических
приборов;
) плохие контакты в местах соединения проводов, когда вследствие
большого переходного сопротивления выделяется большое количество тепла;
) электрическая дуга, возникающая в результате ошибочных операций;
Причинами пожаров неэлектрического характера могут быть:
Неисправность отопительных приборов и нарушение режимов их работы;
Неисправность производственного оборудования и нарушение технологического
процесса, в результате которого возможно выделение горючих газов, паров пли пыли
в воздушную среду;
Курение в пожароопасных помещениях;
Самовоспламенение некоторых материалов.
Основными причинами пожара в устройстве является:
нарушение технологического режима работы;
неисправность электропроводки (старении или повреждение изоляции).
для исключения появления короткого замыкания и перегрузки по току в блоке
питания устройства предусмотрены:
плавкий предохранитель в цепи питания 12 в;
микросхема с автоматической защитой от перегрузок kp142eh5a(5 b).
Данное помещение по пожарной опасности согласно НПБ105-03 должно иметь
категорию В- производства, связанные с обработкой сгораемых веществ в холодном
состоянии. Степень огнестойкости основных строительных конструкций по СНиП
2.27-07-97* равна 3.
Защита сети от короткого замыкания обеспечивается реле и установочными
автоматами. Необходимо также предусмотреть выключатели для отключения питания
всех приборов в лаборатории. При перегрузке наиболее эффективными являются
автоматические схемы защиты, теплое реле и плавкие предохранители.
Технологические операции (например, пайка, лужение горячим припоем,
обжигание концов монтажного провода) проводятся с использованием ЛВЖ (этилового
спирта, ацетона, скипидара) и при повышенной температуре.
Во избежание пожара электрические паяльники должны обеспечиваться
специальными термостойкими подставками. Обжигание изоляции концов проводов
должно производиться в несгораемом вытяжном шкафу. ЛВЖ следует хранить в посуде
с герметичными крышками (пробками). Посуду открывают только в момент
пользования. Количество ЛВЖ не должно превышать суточную потребность.
Вентиляция рабочего места позволяет уменьшить концентрацию в воздухе
легковоспламеняющихся веществ. Вентиляционная система должна иметь устройства,
преграждающие при возникновении пожара возможность распространения огня из
одного этажа в другой или из одного помещения в другое.
Готовая продукция, оборудование, тара и другое имущество должно
находиться на определенных местах.
В лаборатории должна быть вывешена табличка с указанием фамилий и
должности лиц, ответственных за пожарную безопасность.
Коридоры, проходы, основные и запасные выходы, тамбуры, лестничные клетки
должны постоянно содержаться в исправном состоянии, ничем не загроможденные, а
в ночное время освещаться.
Энергоснабжение помещений осуществляется от трансформаторной станции. На
трансформаторных подстанциях особую опасность представляют трансформаторы с
масляным охлаждением. В связи с этим предпочтение следует отдавать сухим
трансформаторам.
Для быстрого вызова городской пожарной части, в случае возникновения
пожара, в лаборатории должны быть средства связи. Весь пожарный инвентарь,
противопожарное оборудование и первичные средства пожаротушения должны
содержаться в исправном состоянии, находиться на видном месте и к ним в любое
время суток должен быть обеспечен беспрепятственный доступ. Все стационарные и
переносные средства пожаротушения должны периодически проверяться и
испытываться.
Для тушения пожара в лаборатории имеется огнетушитель ОУ-2 ТУ27-4563-79,
который предназначен для тушения небольших очагов пожара. Огнетушители
подвергаются периодической проверке и перезарядке.
При возникновении пожара в необходимо немедленно выключить электропитание
лаборатории рубильником и воспользоваться огнетушителем. Также используются ряд
других первичных средств пожаротушения, таких как песок, багры, ведра,
находящиеся на пожарных щитах или возле них.
Организационные мероприятия по пожарной профилактике проводят с целью
обеспечения правильной эксплуатации и проведения противопожарного инструктажа
среди оперативно - ремонтного персонала.
При возникновении пожара, помимо принятия мер по его ликвидации,
необходимо осуществить эвакуацию рабочего персонала из опасной зоны.
Основными причинами возгораний в работающем приборе УБП являются
перегрузка проводов, короткое замыкание, искрение.
5.4 Защита
окружающей среды
При изготовлении устройства применяются следующие технологические процессы:
обработка фольгированного стеклотекстолита и металлов, изготовление печатных
плат, (фотолитография, травление), покрытие лаком печатных плат, монтаж
электрических соединений блока методом пайки.
Все эти процессы влияют на состояние окружающей среды, тем или иным
способом загрязняя ее. Так при механической обработке в почву могут попадать
стружки куски текстолита и другие твердые частицы.
При изготовлении печатных плат используется сильно дейсвующие ядовитые
вещества (хлорное железо), различные растворители для очистки уже готовых плат.
А так как большинство веществ находится в жидком состоянии, то вероятность
попадания этих веществ в воду, водопровод, канализацию и соответственно в
какие-то водоемы, подземные источники, достаточно велика. Покрытие печатных
плат различными лаками приводит к выделению в атмосферу вредных веществ.
Основным загрязнением при этом производстве являются пары свинца,
выделяющиеся при пайке деталей. Для уменьшения этого фактора используем припой
ПОС-60, который содержит 60% олова, остальные 40% свинец.
При разработке и эксплуатации данной системы опасности загрязнения
экосистемы не возникает. Это возможно в силу того, что сопроцессорный модуль не
выделяет вредных веществ, при своей работе не радиоактивен, уровень
электромагнитного излучения не опасен для человека и природы.
На всех этапах изготовления изделия существует опасность загрязнения
литосферы, т.к. данное производство не безотходное. При нарезке, пайке,
травлении печатных плат, изготовление по покраске корпуса остаются отходы,
содержащие свинец, олово и их соединения, органические горючие (обтирочные
материалы, ветошь, обрезки пластмасс, оргстекла, остатки лакокрасочных
материалов), которые необходимо складировать в определенном месте и в
дальнейшем отправлять на переработку на полигон. Переработку промышленных
отходов производят в соответствии с требованиями СНиП 2.01.28-85 и
предназначенных для централизованного сбора, обезвреживания и захоронения
токсичных отходов.
Вывод. При рассмотрении влияния разрабатываемого прибора на окружающую
среду были приняты следующие меры:
При изготовлении прибора:
отстаивание, нейтрализация, фильтрация жидких растворов;
использование фильтров Петрянова;
при эксплуатации прибора:
нет вредных воздействий на окружающую среду;
при утилизации
переплавка
пиролиз.
Заключение
Тема дипломного проекта связана с разработкой системы управления режимами
движения гибридного автомобиля, предназначенной для более рационального
использования затрачиваемой энергии в разных режимах движения, что приводит к
экономии топлива, а так же повышению экологичности автомобиля.
В ходе выполнения дипломного проекта были рассмотрены существующие
гибридные схемы, выделены основные компоненты и принцип работы. Был проведен
анализ в ходе которого предложена последовательно-параллельная гибридная схема.
На основе анализа технического задания произведен выбор основных силовых
агрегатов для гибридной силовой установки. Разработана структурная и
принципиальная электрическая схемы системы управления. Составлен алгоритм режимов
движения гибридного автомобиля. Сделана модель в программе SIMULINK
последовательно-параллельной схемы гибридного автомобиля.
Рассмотрены вопросы технико-экономического обоснования проекта, вопросы
безопасности и экологичности проекта.
Список литературы
1 Разработка
гибридной силовой установки// [Электронный ресурс].
URL:
<http://www.turbo-electric.com>
2 Гибридная силовая установка
автомобиля как объект управления// [Электронный ресурс]. URL:
<http://cyberleninka.ru>
Схемы подключения силовых агрегатов//
[Электронный ресурс]. URL: <http://systemsauto.ru>
Системы управления гибридными
силовыми установками// [Электронный ресурс]. URL: <http://www.hcars.ru>
Исследование устройства и
принципа работы последовательно-параллельной гибридной силовой установки//
[Электронный ресурс]. URL: <http://www.rae.ru>
Бахмутов С.В., Селифонов В.В.
Экологически чистый городской автомобиль с гибридной силовой установкой. НТП
«Вираж-центр», 2001, №
Карунин А.Л., Бахмутов С.В.,
Селифонов В.В., Круташов А.В., Баулина Е.Е., Капухин К.Е., «Экспериментальный
многоцелевой гибридный автомобиль», 2006г, №3.
Сериков С.А., Бороденко Ю.Н..
«Синтез системы управления силовой установкой гибридного автомобиля», 2007г,
Вып. 36.
Сериков С.А. «Оптимизация
управления перераспределением мощности между агрегатами гибридной силовой
установки», 2008г, с. 525 - 528.
Лобов Н.В., «Концепция стенда
гибридной силовой установки», Вестник ПГТУ, 2010, №1, с. 59-65.
Реферативный журнал
«Потребитель. АвтоДела», 2009г, с. 68-75.
ГОСТ 2.102-68. Виды и комплектность
конструкторских документов
ГОСТ 2.104-68. Основные
надписи.
ГОСТ 2.105-95. Общие
требования к текстовым документам
ГОСТ 2.109-73. Основные
требования к чертежам.
ГОСТ 2.316-68. Правила
нанесения на чертежах надписей.
ГОСТ 2.321-84. Обозначения буквенные.
ГОСТ 2.414-75. Правила
выполнения чертежей жгутов, кабелей.
ГОСТ 2.601-95.
Эксплуатационные документы.
ГОСТ 2.417-91. Платы
печатные. Правила выполнения чертежей.
ГОСТ 2.701-84. Схемы. Виды и
типы. Общие требования.
ГОСТ 2.702-75. Правила
выполнения электрических схем.
ГОСТ 2.705-70. Правила
выполнения электрических схем обмоток и изделий с обмотками.
ГОСТ 2.710-81. Обозначения
буквенно-цифровые в электрических схемах.
Мукосеев В.В., Сидоров И.Н.
Маркировка и обозначение радиоэлементов. - М.: МРБ. 2003.
Прянишников В.А. Электроника.
Курс лекций. - Спб.: КОРОНА. 1998.
Цифровые интегральные
микросхемы: Справ. / М. И. Богданович, И. Н. Грель, В. А. Прохоренко, В. В.
Шалимов. - Мн.: Беларусь, 1991.- 493с.
Методические указания по
выполнению технико-экономического обоснования разработок квалификационных
работ. Маркетинговый подход. - Таганрог: Изд-во ТРТУ, 2005. - 36 с.
Автомобильный справочник.
Перевод с англ. - М.:Издательство «За рулем», 2000. - 896 с.
Соснин Д. А. Автотроника.
Электрооборудование и системы бортовой автоматики современных легковых
автомобилей. СОЛОН-Р, 2003.-272 с.