|
Параметр
|
Технические требования
|
Определено в данной работе
|
|
Максимально допустимая погрешность стабилизации скорости при
ступенчатом изменении момента нагрузки от нулевого до максимального
|
0
|
|
Время переходного процесса
|
50 мс
|
≈120 мс
|
|
Время восстановления скорости при ступенчатом изменении момента
нагрузки от нулевого до максимального
|
≤1с
|
0
|
|
Перерегулирование скорости
|
≤20%
|
0
|
|
Полная компенсация гармонической составляющей момента
сопротивления
|
да
|
нет
|
Т.к. не все характеристики системы удовлетворяют
техническим требованиям, то целесообразно синтезировать замкнутую САУ.
3. Синтез астатического каскадного регулятора
Рисунок 3.1 - Структурная схема САУ с каскадным
регулятором.
Механическая постоянная времени якорной цепи:

ТМ >> ТСП = 0,0033
с, следовательно, влияние обратной связи по противоЭДС будет незначительным, т.
е. этой связью можно пренебречь
Регулятор тока: выбирается ПИ-регулятор, общий
вид передаточной функции

где τТ
= TЯ,
т.к. необходимо скомпенсировать постоянную времени якоря, постоянной времени
силового преобразователя пренебрегают;
После подстановки числовых значений, получается
передаточная функция регулятора тока следующего вида:

Расчет переходных характеристик:

Рисунок 3.2 - Переходная характеристика контура
тока

Рисунок 3.3 - Переходная характеристика контура
скорости.
Оценивается качество замкнутой САУ:
время регулирования Тр = 0,11 с;
время нарастания ТН = 0,02 с;
относительная погрешность стабилизации скорости ΔМ
= 0%;
время восстановления ТВ ≈ 0,55
с;
- перерегулирование скорости σ = 
 ;
;
относительное отклонение
периодической составляющей от заданного значения ΔМsin = 2,5 %.
Не выполняются требования по быстродействию
и полной компенсации гармонической составляющей момента, но выполняется
требование к точности.
Определяется линейная зона работы:


Рисунок 3.4 - Максимальная амплитуда
тока: а) - при UВХ = 1 В; б) -
при UВХ = 1,15 В
при UВХ = 1 В IMAX = 62,3 А;
для получения IMAX = 3IН = 72 А UВХ должно быть
равным:
UВХ.лин =
(72/62,3)·1 = 1,15 В, следовательно система будет работать в линейной зоне при UВХ от 0 до 1,15
В.
Реализация регуляторов на
операционных усилителях:
Рисунок 3.5 - Реализация
ПИ-регулятора на операционных усилителях.
Регулятор тока:
1) βТ = 0,11 -
следовательно R4/R3 = 0,11.
Принимается R3 = 100 кОм,
тогда R4 = 11 кОм.
2) τТ = 0,0073 с
- следовательно С1R = 0,0073. Принимается С1
= 1 мкФ, тогда R1 = R2 = 7,3 кОм.
Регулятор скорости:
1) βТ = 24,56 -
следовательно R4/R3 = 24,56.
Принимается R3 = 10 кОм,
тогда R4 = 245,6
кОм.
2) τТ = 0,13 с -
следовательно С1R = 0,13. Принимается С1 =
10 мкФ, тогда R1 = R2 = 13 кОм.
. Расчет уставки токоограничения и
ограничения напряжения
Ограничение по току: IMAX = ±3IН = ±72 А,
ограничение по напряжению UMAX = КДТ·IMAX = 0,5·72 =
36 В. По напряжению требуется ограничение UMAX.ТР = ±1,2·10 B = ±12В,
следовательно требуется уменьшить в 3 раза коэффициент датчика тока, но т.к.
величина КДТ используется при расчете параметров регуляторов βС (прямо
пропорционально КДТ) и βТ (обратно
пропорционально КДТ) , то необходимо пересчитать и их.
КДТ = 0,5/3 = 0,166
βС = 24,56/3 =
8,186
βТ =
0,11·3=0,33
Т.к. регуляторы тока и скорости
ПИ-типа, то вводится регулятор следующего вида:
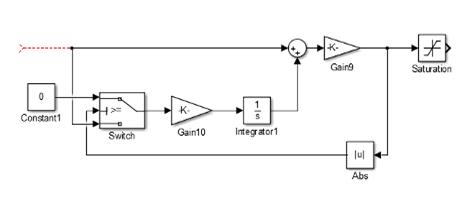
Рисунок 4.1 - Регулятор ПИ-типа с
ограничением.
Рассчитываются переходные
характеристики при UВХ = 10 В:
Рисунок 4.2 - Переходная
характеристика напряжения на выходе силового преобразователя.
Рисунок 4.3 - Переходная
характеристика тока
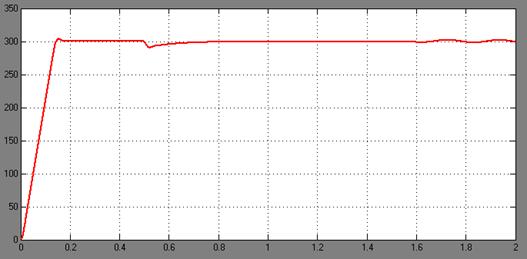
Рисунок 4.4 - Переходная
характеристика скорости.
Как видно из переходных
характеристик, максимальный ток двигателя не превышает 72 А, напряжение на
выходе силового преобразователя не превышает 264 В и уменьшается
перерегулирование, но снижается быстродействие.
5. Синтез астатического
полиномиального регулятора «входа-выхода»
В качестве характеристического
полинома выбирается полином Ньютона. Необходимо определить величину среднего
геометрического корня, исходя из требуемого быстродействия системы (ТП
= 50 мс).
В п.2 было определено, что система
полностью управляема по входу Uy.
Порядки полиномов: degA = 3, degB = 0, degC = 0, degR = 3, degD = 4.
Уравнение синтеза:
sC(s)A(s)+R(s)B(s) = D(s).
Среднегеометрический корень: Ω0 ≥ (4
+ 2√3)/0,05 = 149,28. Выбирается среднегеометрический корень, равный 160.
Для определения коэффициентов
полиномов С и R нужно
составить с помощью уравнения синтеза систему уравнений и решить ее:

где d4 = 1, d3 = 4 Ω0, d2 = 6 Ω02,d1 = 4 Ω03, d0 = Ω04.
Было получено следующее решение: c0 = 1; r3 = 7,46·10-6,
r2 = 0,0041 , r1 = =0,582, r0 = 24,445.
Передаточная функция регулятора:
Данный регулятор технически
нереализуем, поэтому необходимо ввести в знаменатель выражение (Ts + 1)3,
где Т - очень малая постоянная времени, не влияющая на работу системы
(принимается Т = 0,0001 с).
Рисунок 5.2 - Структурная схема САУ
с полиномиальным регулятором.
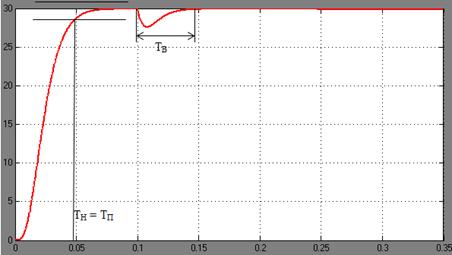
Рисунок 5.3 - Переходная характеристика
скорости САУ с полиномиальным регулятором.
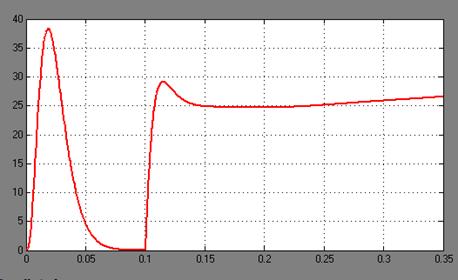
Рисунок 5.4 - Переходная
характеристика тока САУ с полиномиальным регулятором.
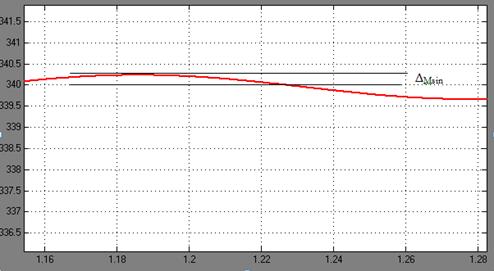
Рисунок 5.5 - Определение отклонения
периодической составляющей скорости от заданного значения.
Оценивается качество замкнутой САУ:
время регулирования Тр =
0,049 с;
время нарастания ТН =
0,049 с;
относительная погрешность
стабилизации скорости ΔМ = 0%;
время восстановления ТВ ≈
0,04 с;
перерегулирование скорости σ = 0;
- относительное отклонение
периодической составляющей от заданного значения ΔМsin = 0,074 %.
Выполняются требования по
быстродействию, точности и практически полностью компенсируется гармоническая
составляющая момента сопротивления.
. Синтез астатического регулятора
состояния
Выбирается первая степень астатизма,
характеристический полином - полином Ньютона.
Рисунок 6.1 - Структурная схема САУ
с регулятором состояния.
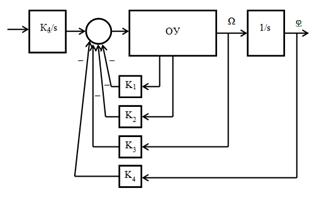
Рисунок 6.2 - Расчетная схема САУ с
астатическим регулятором состояния.
Т.к. появляется дополнительная
переменная состояния φ
- угол
поворота, то необходимо расширить векторно-матричное описание системы.



Определяются матрицы А, В и С:

Вычисляется матрица управляемости:


Определитель матрицы управляемости
не равен нулю, следовательно система полностью управляема.
Характеристический полином:
A(s) = det(sI - A) = s4 + 440,02s3 + 44109,22s2
+787339,65s.
Для вычисления матрицы
преобразования P =  необходимо составить
векторно-матричное описание в форме управляемости:
необходимо составить
векторно-матричное описание в форме управляемости:


Матрица управляемости в форме управляемости:

Матрица преобразования:
Выбирается полином Ньютона 4-го
порядка со среднегеометрическим корнем, равным 160 (как и в предыдущем пункте).
D(s) = d4s4
+ d3s3 + d2s2 + d1s
+ d0,
где d4 = 1, d3 = 4 Ω0 = 640 , d2 = 6 Ω02 = 153600,d1 = 4 Ω03 = 16384000, d0 = Ω04 =
655360000.

Матрица К в естественных
координатах:
К =(К1 К2 К3
К4) = (0,03 0,099 0,56 24,101)
В величины коэффициентов К1,
К2, К3 входят коэффициенты датчика напряжения КДН,
датчика тока КДТ и датчика скорости КДС соответственно.
Расчет переходных характеристик:
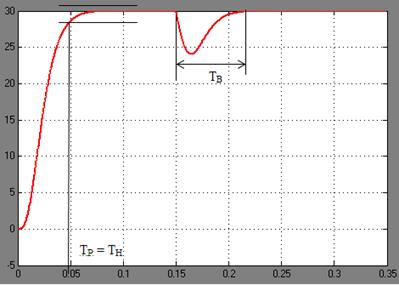
Рисунок 6.3 - Переходная
характеристика скорости.
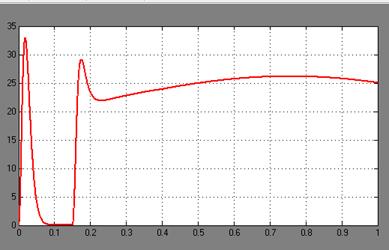
Рисунок 6.4 - Переходная
характеристика тока.
Оценивается качество замкнутой САУ:
время регулирования Тр =
0,049 с;
время нарастания ТН =
0,049 с;
относительная погрешность
стабилизации скорости ΔМ = 0%;
время восстановления ТВ ≈
0,07 с;
перерегулирование скорости σ = 0;
Выполняются требования по
быстродействию, точности и значительно компенсируется гармоническая
составляющая момента сопротивления.
Определяется линейная зона работы:
при UВХ = 1 В IMAX = 33 А,
следовательно для того, чтобы IMAX стал равным
72 А, необходимо подать UВХ = 2,18 В.
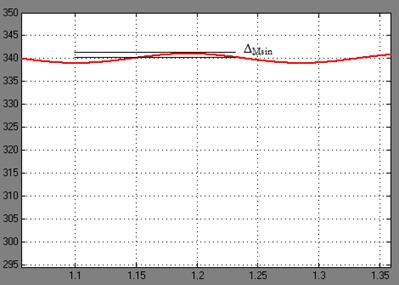
Рисунок 6.5 - Определение отклонения
периодической составляющей скорости от заданного значения.
. Синтез регулятора с внутренней
моделью возмущения
Регулятор с внутренней моделью
возмущения будет синтезирован на основе регуляторов, полученных в п.5 и 6, но с
быстродействием в 7 раз выше требуемого. Для этого нужно изменить
среднегеометрический корень характеристического полинома, т. е. увеличить его в
7 раз, и пересчитать коэффициенты регулятора состояния и полиномиальный
регулятор. Увеличение быстродействия позволит считать внутреннюю подсистему
безынерционным звеном при синтезе внешнего регулятора с моделью возмущения К =
30.
Коэффициенты нового регулятора
состояния: К1 = 0,606; К2 = 8,315; К3 =
208,343; К4 = 58410.

Рисунок 7.1 - Переходная
характеристика САУ с увеличенным быстродействием регулятора состояния
Коэффициенты полинома R(s): r3 = 1,506·10-4;
r2 = 0,279; r1 = 209,583; r0 = 58691,51.
C(s) = 1.

Рисунок 7.2 - Переходная
характеристика САУ с увеличенным быстродействием полиномиального регулятора
Рисунок 7.3 - Структурная схема
регулятора с внутренней моделью возмущения
Записывается уравнение синтеза: A(s)C(s) + B(s)R(s) = D(s). Т.к.
объект управления с быстродействующим регулятором можно представить в виде
безынерционного звена, то A(s) = 1, B(s) = K = 30.
Модель возмущения закладывается в полином С(s) = s2 + ω2 = s2 + 9 (т.к.
расчетный режим: Ω
= 0,1ΩМ = 30 рад/с
и ω
= 0,1Ω = 3 рад/с).
Полином R(s) - 1-го
порядка, полином D(s) - полином
Ньютона 2-го порядка.
Раскрывается уравнение синтеза: 1·( s2 + 9) + 30·(r1s + r0) = s2 + 200s + 10000
Определяются коэффициенты полинома R(s) r1 и r0:
r1 = 200
r0 + 9 = 10000
Отсюда r1 = 6,666; r0 = 333,033.
Расчет переходных характеристик:
) для внутреннего астатического
полиномиального регулятора с высоким быстродействием и внешнего по отношению к
нему регулятора с моделью возмущения
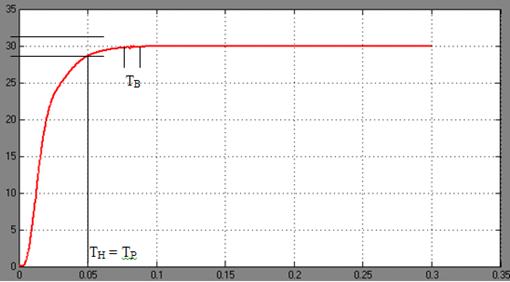
Рисунок 7.4 - Переходная
характеристика скорости.
Рисунок 7.5 - Переходная
характеристика тока.
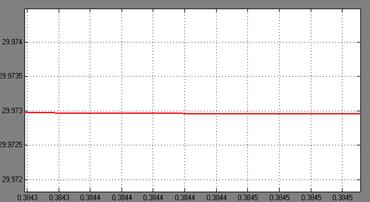
Рисунок 7.6 - Определение отклонения
периодической составляющей скорости от заданного значения
Оценивается качество замкнутой САУ:
время регулирования Тр =
0,05 с;
время нарастания ТН =
0,05 с;
относительная погрешность
стабилизации скорости ΔМ = 0%;
время восстановления ТВ ≈
0,01 с;
перерегулирование скорости σ = 0;
- относительное отклонение
периодической составляющей от заданного значения ΔМsin ≈ 0 %.
Выполняются все технические
требования.
Определяется линейная зона работы:
при UВХ = 1 В IMAX = 57 А,
следовательно для того, чтобы IMAX стал равным
72 А, необходимо подать UВХ =1,26 В.
) для внутреннего астатического
регулятора состояния с высоким быстродействием и внешнего по отношению к нему
регулятора с моделью возмущения

Рисунок 7.7 - Переходная характеристика скорости.

Рисунок 7.8 - Переходная характеристика тока.
Оценивается качество замкнутой САУ:
время регулирования Тр = 0,05 с;
время нарастания ТН = 0,05 с;
относительная погрешность стабилизации скорости ΔМ
= 0%;
время восстановления ТВ ≈ 0,03
с;
перерегулирование скорости σ
= 0;
- относительное отклонение периодической
составляющей от заданного значения ΔМsin
= 0 %.
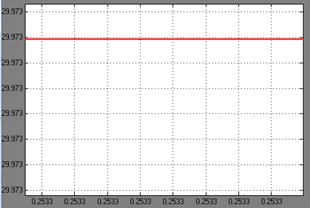
Рисунок 7.9 - Определение отклонения
периодической составляющей скорости от заданного значения.
Выполняются все технические требования.
Определяется линейная зона работы: при UВХ
= 1 В IMAX
= 50,3 А, следовательно для того, чтобы IMAX
стал равным 72 А, необходимо подать UВХ
= =1,43 В.
. Синтез задатчика интенсивности (ЗИ) и токовой
отсечки
Необходимо выбрать одну из двух систем
управления, полученных в пункте 7. Выбирается система с внутренним регулятором
состояния и с внешним регулятором с моделью возмущения.

Рисунок 8.1 - Структурная схема задатчика
интенсивности
ЗИ должен ограничивать ток при формировании
переходных процессов в «большом», но не должен снижать быстродействие системы в
«малом» в пределах тока 3·IH.
Чтобы влияние ЗИ на быстродействие системы было
незначительным, выбирается К = 1000. (ТЗИ = 1/К = 1 мс << ТПП
= 50 мс).
Для того, чтобы максимальный ток не превышал 3·IH,
нужно подобрать параметр нелинейности типа «ограничение» ε
при
помощи моделирования. Пуск двигателя следует осуществлять на максимальную
скорость в наихудшем режиме, т.е. при одновременной подаче управляющего Uy
и возмущаещего МС воздействий. Получено значение ε
= 40.
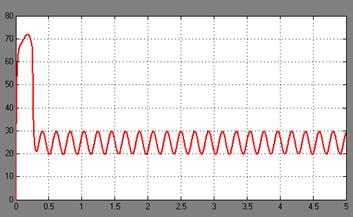
Рисунок 8.2 - Переходная характеристика САУ с ЗИ
по току при пуске двигателя на максимальную скорость

Рисунок 8.3 - Переходная характеристика САУ с ЗИ
по скорости при пуске двигателя на максимальную скорость
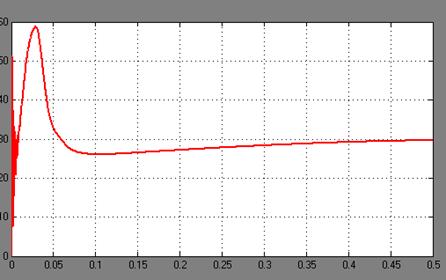
Рисунок 8.4 - Переходная характеристика САУ с ЗИ
по току в линейной зоне работы
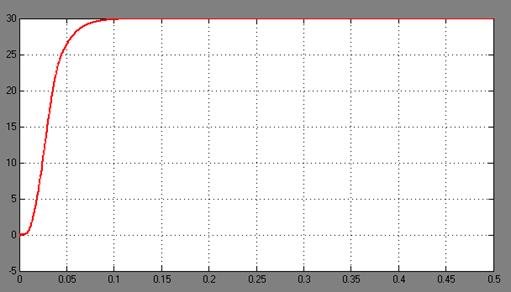
Рисунок 8.5 - Переходная характеристика САУ с ЗИ
по скорости в линейной зоне работы
Как видно из переходных характеристик САУ, ЗИ
ограничивает ток при выходе из линейной зоны работы до 72 А (3IH)
и двигатель разгонятся при этом токе до максимальной скорости, но при работе в
линейной зоне несколько снижает быстродействие.

Задатчик интенсивности позволяет защитить
двигатель по управляющему воздействию, но не по воздействию МС.
Для защиты двигателя при воздействии со стороны
вала двигателя нужно ввести в систему задержанную обратную связь по току
(токовую отсечку).
Токовая отсечка состоит из нелинейности типа
«зона нечувствительности», коэффициента усиления обратной связи (для
преодоления влияния других контуров он должен быть достаточно большим, например
1000) и корректирующего звена.

Рисунок 8.7 - Структурная схема токовой отсечки
Границы зоны нечувствительности: ±3Iном
= ±72 А, коэффициент усиления К = 1000. Необходимо определить передаточную
функцию корректирующего звена, для этого нужно использовать метод
гармонического баланса: нелинейная часть системы - зона нечувствительности,
линейная часть - вся остальная схема относительно зажимов нелинейности.
Уравнения линеаризованного нелинейного элемента:
 , при |а| ≥ 72
, при |а| ≥ 72
 , при |а| < 72
, при |а| < 72
Характеристика зоны
нечувствительности -1/НН(а) лежит на действительной оси: начинается
в точке -∞ и стремится к -1. АФЧХ линейной части системы не должна
пересекать характеристику -1/НН(а), чтобы в системе не возникали
колебания.

Рисунок 8.8 - Нескорректированная
АФЧХ линейной части системы

Рисунок 8.9 - Переходные
характеристики САУ по току и скорости при нескорректированной АФЧХ
Передаточная функция линейной части
без коррекции:

Из рисунков 8.8 и 8.9 видно, что
АФЧХ линейной части системы будет пересекать характеристику -1/НН(а),
система теряет устойчивость, следовательно нужна ее коррекция. В качестве
корректирующего звена экспериментально был выбран ПИ-регулятор 3-го порядка с
передаточной функцией 
 .
.
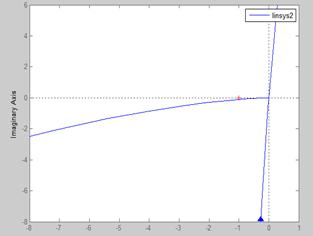
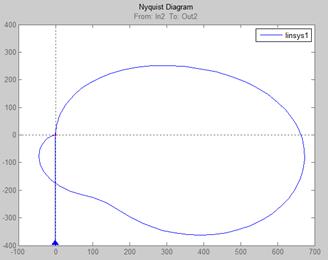
Рисунок 8.10 - Скорректированная
АФЧХ линейной части системы

Рисунок 8.11 - Переходные
характеристики по току и скорости при подаче момента, равного 4Мном
Как видно из рисунка 8.9, токовая
отсечка обеспечивает защиту двигателя от перегрузки по моменту.
Передаточная функция линейной части
с коррекцией:

. Цифровая реализация по аналоговому
прототипу полиномиального регулятора с внешним регулятором с моделью возмущения
Синтез регулятора выполняется
методом цифрового перепроектирования, т.е. в передаточную функцию аналогового
регулятора подставляется упрощенная z-форма s = (z - 1)/zT0, что
соответствует интегрированию по методу Эйлера. Передаточная функция регулятора
не будет эквивалентна передаточной функции, полученной z-преобразованием
с помощью таблиц, но при малом такте квантования Т0 они окажутся
близкими. Такт квантования Т0 принимается равным 0,1 мс.
Полученная передаточная функция
интегратора внутреннего астатического регулятора состояния:
Коэффициенты обратных связей
регулятора не изменяются, только дополнительно включаются экстраполяторы
нулевого порядка.
Полученная передаточная функция
внешнего регулятора с моделью возмущения:

Расчет переходных характеристик при
различных тактах квантования:
) Т0 = 0,1 мс
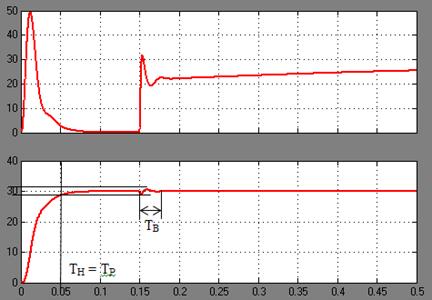
Рисунок 9.1 - Переходные
характеристики по току и скорости при Т0 = 0,1 мс
Оценивается качество замкнутой САУ:
время регулирования Тр =
0,05 с;
время нарастания ТН =
0,05 с;
относительная погрешность
стабилизации скорости ΔМ = 0%;
время восстановления ТВ ≈
0,03 с;
перерегулирование скорости σ = 0;
- относительное отклонение
периодической составляющей от заданного значения ΔМsin = 0 %.
Выполняются все технические
требования.
) Т0 = 0,5 мс
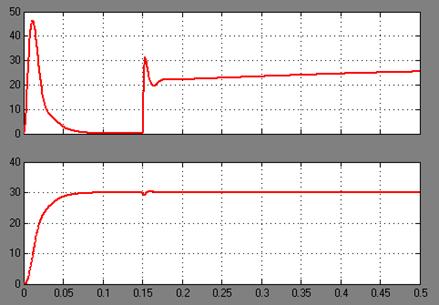
Рисунок 9.2 - Переходные
характеристики по току и скорости при Т0 = 0,5 мс
) Т0 = 0,505 мс
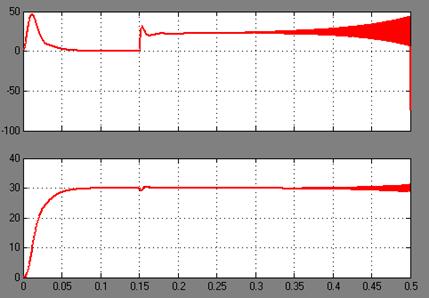
Рисунок 9.3 - Переходные
характеристики по току и скорости при Т0 = 0,505 мс
Как видно из рисунка 9.4 при такте
квантования Т0 = 0,505 мс переходные процессы в системе значительно
ухудшаются.
Необходимо составить разностные
уравнения синтезированного регулятора:
) интегратор внутреннего
астатического регулятора состояния:

2) внешний регулятор с моделью
возмущения:


 .
.
. Синтез регулятора в дискретном
виде по дискретной модели объекта
При такте квантования Т0
= 0,505 мс наблюдается существенное расхождение переходных процессов аналоговой
и цифровой систем. Для устранения этого необходимо синтезировать регуляторы по
дискретной модели объекта.
С помощью программы Satellite были
получены коэффициенты астатического регулятора состояния:
Коэффициенты: К1 = 0,323; К2
= 3,336; К3 = 67,963; К4 = 15758,961.
Т.к. внутренний РС очень быстрый, то при расчете
внешнего регулятора с моделью возмущения объект с РС можно принять
безынерционным звеном К = 30.
Уравнение синтеза: C(z)
+ К·R(z)
= D(z),
где C(z)
- модель возмущения,2 порядка; R(z)
- 1 порядка. Желаемый характеристический полином - полином Ньютона 2 порядка с
быстродействием в 50 мс. Отсюда средний геометрический корень равен:
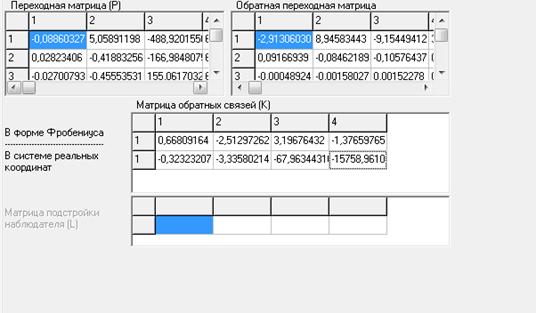
Рисунок 10.1 - Коэффициенты астатического РС,
рассчитанные в Satellite
Принимается 
Необходимо получить полиномы C(z) и D(z) в
дискретной форме. Для этого в программе Satellite нужно
выполнить следующие действия:
) в разделе «Параметры» выбрать тип
регулятора полиномиальный (или наблюдатель состояния) в цифровой форме и модель
объекта управления в виде вход-выходного описания в непрерывной форме:

Рисунок 10.2 - Задание параметров регулятора и
модели
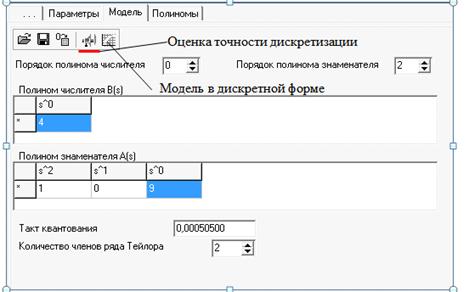
Рисунок 10.3 - Задание дискретизируемого
полинома и точности дискретизации
) выбрать значок «Модель в дискретной форме» и
полином знаменателя A(z)
будет являться дискретной формой требуемого полинома при заданном такте квантования:
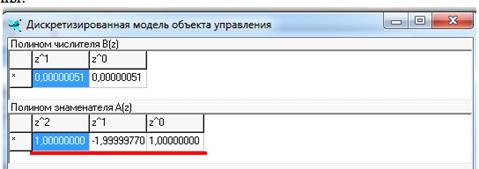
Рисунок 10.4 - Получение требуемого полинома в
дискретной форме
Модель возмущения в дискретной форме: C(z)
= 1 - 1,9999977z-1
+
z-2.
Желаемый характеристический полином:
D(z)
= 1 - 1,90155025z-1
+ +0,90397334z-2.
Раскрывается уравнение синтеза:
(1 - 1,9999977z-1
+
z-2)
+ 30·(r1z-1
+ r0z-2)
= 1 - 1,90155025z-1
+ 0,90397334z-2
Определяются коэффициенты полинома R(z)
r1
и r0:
r1
- 1,9999977 = -1,90155025
r0
+ 1 = 0,90397334
Отсюда r1
= 0,00328; r0
= -0,0032.
Необходимо записать разностные уравнения
регуляторов:
) внутренний астатический РС: обратные связи -
рассчитанные коэффициенты с экстраполяторами нулевого порядка, интегратор -

2) внешний регулятор с моделью возмущения:


 .
.
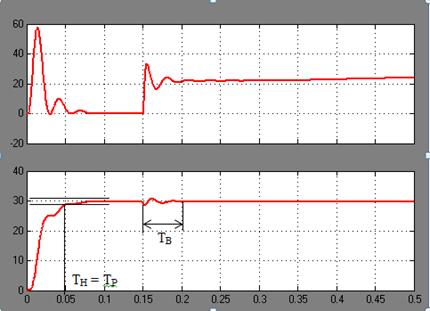
Рисунок 10.5 - Переходные
характеристики САУ по току и скорости при Т0 = 0,505 мс
При такте квантования Т0
= 0,505 мс регулятор, синтезированный по дискретной модели объекта,
обеспечивает необходимое качество переходных процессов в отличие от регулятора,
синтезированного по аналоговому прототипу при том же такте квантования.
Оценивается качество замкнутой САУ:
время регулирования Тр =
0,049 с;
время нарастания ТН =
0,049 с;
относительная погрешность
стабилизации скорости ΔМ = 0%;
время восстановления ТВ ≈
0,05 с;
перерегулирование скорости σ = 0;
- относительное отклонение
периодической составляющей от заданного значения ΔМsin = 0 %.
Выполняются все технические
требования.
Выводы
В данной работе были синтезированы:
) в непрерывной форме
каскадный регулятор;
полиномиальный регулятор (ПР);
регулятор состояния (РС);
ПР и РС с моделью возмущения.
) в дискретном виде
РС с моделью возмущения по аналоговому
прототипу при Т0 = 0,1 мс;
РС с моделью возмущения по
дискретной модели объекта при Т0 = 0,505 мс.
Для защиты объекта управления
(двигателя) для каскадного регулятора были синтезированы регуляторы с
ограничениями по току и напряжению, а для РС с моделью возмущения - задатчик
интенсивности и токовая отсечка.
Составляется таблица, обобщающая характеристики
всех регуляторов («+» - выполняется, «-» - не выполняется).
Таблица 2
|
Регулятор
|
Технические требования
|
|
Максимально допустимая погрешность стабилизации скорости ΔМ = 0 %
|
Время переходного процесса по скорости, ТП = 50 мс
|
Время восстановления скорости, ТВ ≤ 1 с
|
Перерегулирование скорости, σ ≤ 20%
|
Полная компенсация в статике гармонической составляющей момента,
ΔМsin = 0%
|
|
Каскадный
|
0 (+)
|
110 мс (-)
|
0,55 с (+)
|
18,5% (+)
|
2,5% (-)
|
|
ПР
|
0 (+)
|
49 мс (+)
|
0,04 с (+)
|
0 (+)
|
0,074% (-)
|
|
РС
|
0 (+)
|
49 мс (+)
|
0 (+)
|
0,29% (-)
|
|
ПР с МВ
|
0 (+)
|
50 мс (+)
|
0,01 с (+)
|
0 (+)
|
0% (+)
|
|
РС с МВ
|
0 (+)
|
50 мс (+)
|
0,03 с (+)
|
0 (+)
|
0% (+)
|
|
РС с МВ в дискретном виде, синтезированный по аналоговому
прототипу (Т0 = 0,1 мс)
|
0 (+)
|
50 мс (+)
|
0,03 с (+)
|
0 (+)
|
0% (+)
|
|
РС с МВ в дискретном виде, синтезированный по дискретной модели
объекта (Т0 = 0,505 мс)
|
0 (+)
|
49 мс (+)
|
0,05 с (+)
|
0 (+)
|
0% (+)
|
Регуляторы с моделью возмущения в непрерывном и
дискретном виде полностью удовлетворяют техническим требованиям. Регулятор,
синтезированный по аналоговому прототипу можно использовать в цифровых
системах, где нет проблемы обеспечения высокого быстродействия, т.е. возможно
задавать малый такт квантования; а регулятор, синтезированный по дискретной
модели объекта можно применять в системах с ограниченным быстродействием.