|
j i
|
1
|
2
|
3
|
4
|
5
|
|
1
|
12,3727,61462,60258,22151,082
|
|
|
|
|
|
2
|
46,045
|
61,228
|
80,627
|
72,259
|
61,569
|
|
3
|
52,958
|
68,201
|
84,327
|
75,141
|
63,721
|
|
4
|
54,377
|
69,62
|
75,733
|
64,163
|
По результатам расчета видно, что
двигатель особенно сильно нагревается, если мощность нагрузки превышает его
номинальную мощность.
Усредненная кривая
нагрева строится по результатам аналогичного теплового расчета двигателя,
формула (4.3), только вместо потерь на интервале подставляем среднее значение
потерь в двигателе. Расчет вести до  .
.
Построим кривую нагрева
двигателя, рассчитанную по нагрузочной диаграмме и усредненную кривую нагрева
по результатам расчета средних потерь.

Рисунок 2 - Диаграмма
потерь и кривая нагрева
5. Расчет механических
характеристик двигателя
Механическими
характеристиками АД называют зависимости  и
и  .
.
Аналитически выражения
данных характеристик достаточно сложны, требуют много параметров АД и для
практических целей используются редко. Более простой является формула Клосса,
существенно отличается от реальной, однако на этой части характеристики
асинхронные двигатели не работают, и практического значения для анализа задач
электропривода она не представляет.
Расчет естественных
характеристик двигателя
 (5.1)
(5.1)
 (5.2)
(5.2)
 (5.3)
(5.3)
Номинальная частота вращения по
формуле (6.1):

Номинальный момент на валу по
формуле (5.2)

Критическое скольжение,
соответствующее максимальному моменту по формуле (5.3):

Расчет реостатных механических
характеристик.
Введение добавочного
сопротивления в цепь ротора приводит к увеличению критического скольжения,
максимальный момент при этом не изменяется. Иными словами, механическая
характеристика смещается вниз, а - вправо. Тем самым при
постоянном моменте сопротивления  частота вращения
несколько снижается.
частота вращения
несколько снижается.
 (5.4)
(5.4)
 (5.5)
(5.5)
 (5.6)
(5.6)
 (5.7)
(5.7)
 (5.8)
(5.8)
Определяем сопротивление ротора
двигателя по формуле (5.4):

Номинальная частота вращения
двигателя на реостатной характеристике (с учетом заданного снижения частоты)
рассчитывается по формуле (5.5):

Соответствующее ей скольжение по
формуле (5.6):
Добавочное сопротивление в цепи
ротора находим по формуле (5.7):

Критическое скольжение на реостатной
характеристике находим по формуле (6.8):

Зависимость момента от скольжения
описывается упрощенной формулой Клосса (5.9), а зависимость момента описанная
переведённой формулой Клосса, через обороты, по формуле (5.10) отображена в
формуле (5.11):
 (5.9)
(5.9)
 (5.10)
(5.10)

Рисунок 3 - Зависимость M=f(s) для естественной и реостатной
характеристики
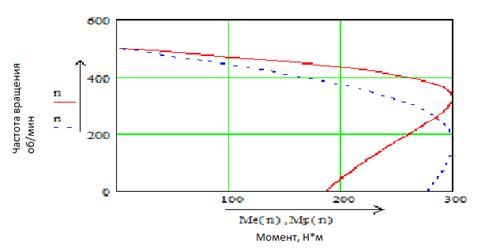
Рисунок 4. Зависимость n=f(M) для естественной и реостатной
характеристики
6. Расчет резисторов
пускового реостата
Пусковые диаграммы в
этом случае обычно строятся не по токам, а по моментам  . Выбор максимального
. Выбор максимального  и переключающего
и переключающего  моментов определяется
условиями:
моментов определяется
условиями:

 (6.1)
(6.1)
Эти моменты связаны соотношениями:
 (6.2)
(6.2)
Если момент  то механические характеристики
можно считать линейными. Такой подход возможен при пуске АД в режиме х.х. (
то механические характеристики
можно считать линейными. Такой подход возможен при пуске АД в режиме х.х. ( ), принятом в данной
работе. Величина момента переключения
), принятом в данной
работе. Величина момента переключения
в
этом случае не ограничена нижним пределом.
По условию задания число
пусковых ступеней z=2. Если принять, что
отрезок dc пропорционален  , то сопротивление
секций пускового реостата может быть найдено по соотношениям:
, то сопротивление
секций пускового реостата может быть найдено по соотношениям:
 (6.3)
(6.3)
 (6.4)
(6.4)

Пиковый момент по формуле (7.3):
 (6.5)
(6.5)

Переключающий момент при числе
секций пускового реостата z=2 находится по формуле (7.3):
 (6.6)
(6.6)
Зависимость частоты вращения от
момента на обеих секциях пускового реостата, на первой секции и на второй
отдельно, представлены в формулах (6.7), (6.8), (6.9) соответственно:
 (6.7)
(6.7)
 (6.8)
(6.8)
 (6.9)
(6.9)
По ним строится пусковая диаграмма,
представленная на рисунке 5.
Рисунок 5 - Пусковая
диаграмма АД
Если принять, что
отрезок dc пропорционален  , то сопротивление
секций пускового реостата может быть найдено по соотношениям:
, то сопротивление
секций пускового реостата может быть найдено по соотношениям:
 (6.10)
(6.10)
Учитывая, что (a) - это минимальное число оборотов, т.е. ноль, а (d) - максимальное, т.е. равно ( ). Рассчитываем величину
отрезков:
). Рассчитываем величину
отрезков:
bc
=150 об/мин;
cd=80
об/мин;
Исходя из расчёта
отрезков находим сопротивление секций реостата из формулы (7.7):


7. Расчет электрических
потерь при пуске двигателя
Электрические потери при
пуске асинхронных двигателей состоят из потерь роторной цепи, определяемых
запасом кинетической энергии, которую приобретает привод к концу пуска, и
потерь в статорной цепи, зависящих от соотношения активных сопротивлений
статорной и роторной цепей.
Незначительными
постоянными потерями в процессе пуска и влиянием намагничивающего тока можно
пренебречь.
Для расчета
электрических потерь необходимо предварительно определить скольжение при
переходе с одной характеристики на другую. В соответствии с пусковой диаграммой
(см. рис. 5) первое переключение должно быть при частоте вращения
Скольжение  , соответствующее
заданной частоте вращения в точках (b
и с), можно найти по формуле:
, соответствующее
заданной частоте вращения в точках (b
и с), можно найти по формуле:
 (7.1)
(7.1)
Здесь n1 - синхронная частота вращения, n - частота вращения ротора, в точках
переключения.
Каждому переключению
соответствует своя частота вращения ротора. Из пусковой диаграммы видно, что
они соответствуют, и численно равны точкам переключения b и с. Отсюда: для  n=b=490 об/мин, а для
n=b=490 об/мин, а для  n=с=660 об/мин.
n=с=660 об/мин.
Найдем скольжения,
соответствующие этим моментам подставив данные в формулу (8.1):
- первое переключение, - второе переключение.
Угловая синхронная частота вращения
находится по формуле (8.2):
 (7.2)
(7.2)

Потери электрической
энергии, Дж, при реостатном пуске, принимая  , при первой и второй
реостатной характеристике определяем по формулам:
, при первой и второй
реостатной характеристике определяем по формулам:
 (7.3)
(7.3)
 (7.4)
(7.4)
 (7.5)
(7.5)
 (7.6)
(7.6)
 (7.7)
(7.7)
Потери при работе двигателя на
первой реостатной характеристике находим по формуле (7.3):

R1 - сопротивление цепи
статора - в первом приближении принимаем его равным собственному сопротивлению
ротора.
Потери при работе двигателя на второй
реостатной характеристике, по формуле (7.4):

Потери при работе двигателя
естественной характеристике, по формуле (7.5):

Суммарные потери при реостатном
пуске, по формуле (7.6):

Потери при прямом пуске находим по
формуле (8.6):

Воспользовавшись формулой (7.8), для
перевода потерь в практические единицы, кВт·ч.
 (7.8)
(7.8)
Разница потерь между реостатным и
прямым пуском:

Как видно из уравнения применение
реостатного пуска позволяет сэкономить почти в 2 раза.
8. Управление пуском АД
Управление пуском АД с
короткозамкнутым ротором
Рисунок 6 - Принципиальная схема
управления пуском АД с короткозамкнутым ротором
Схема управления асинхронным
двигателем с использованием магнитного пускателя (рис. 6) включает в себя
магнитный пускатель, состоящий из контактора KM и двух встроенных в него
тепловых реле защиты KK. Такая схема обеспечивает прямой (без ограничения тока
и момента) пуск АД, отключение его от сети, а также защиту от коротких
замыканий (предохранители FA) и перегрузки (тепловые реле KK). Для пуска
двигателя замыкается выключатель QF и нажимается кнопка пуска SB1. При этом
получает питание катушка контактора KM, который, включившись, своими главными
силовыми контактами в цепи статора подключает двигатель к источнику питания, а
вспомогательным контактом шунтирует кнопку SB1. Происходит разбег асинхронного
двигателя по его естественной характеристике. При нажатии кнопки остановки SB2
контактор KM теряет питание и отключает АД от сети. Начинается процесс
торможения асинхронного двигателя выбегом под действием момента нагрузки на его
валу.
Управление пуском АД с фазным
ротором в функции времени
Упрощенная схема управления пуском
АД с фазным ротором в функции времени в две пусковые ступени приведена на рис.
7. В данную схему включены реле времени KT1 и KT2, имеющие свои контакты KT1 и
KT2 в цепях силовых контакторов KM2 и KM3. Контакты KT1 и KT2 работают на
замыкание после потери питания катушек реле KT1 и KT2 с задержкой по времени.
При замыкании рубильника Q
напряжение подается на катушки реле времени KT1 и KT2 через замкнутые контакты
KM1 и KM2 и контакты реле KT1 и KT2 оказываются разомкнутыми. После нажатия
кнопки пуска SB1 получает питание катушка контактора KM1, в результате чего
подается напряжение на статор двигателя, блокируется кнопка SB1 и теряет
питание катушка реле времени KT1. Начинается отсчет времени пуска со всеми
пусковыми резисторами. После выдержки времени замыкается контакт KT1, получает
питание силовой контактор KM2, что приводит к выводу из цепи ротора резистора
Rд1 и к потере питания реле времени KT2. По окончании времени срабатывания
катушки реле KT2 замыкается контакт реле KT2, получает питание силовой
контактор KM3, шунтируется оставшийся резистор Rд2, двигатель переходит на
естественную характеристику. Продолжительность автоматического пуска
складывается из значений времени срабатывания реле KT1 и KT2 и времени разгона
двигателя по естественной характеристике.
Защита АД предусмотрена такая же как
и в схеме, приведенной на рис. 7 Нажатием кнопки остановки SB2 двигатель
отключается от сети, при этом катушка контактора KM1 теряет питание и
замыкающие контакты его KM1 размыкают цепь статора.
Рисунок 7 - Принципиальная схема
управления пуском АД с фазным ротором
Управление реверсом
АД с короткозамкнутым ротором
Основным элементом в схеме
управления реверсом (рис. 8) является реверсивный магнитный пускатель, который
включает в себя два линейных контактора (KM1 и KM2) и два тепловых реле защиты
(KK). Такая схема обеспечивает прямой пуск и реверс асинхронного двигателя, а
также торможение АД противовключением при ручном (неавтоматическом) управлении.
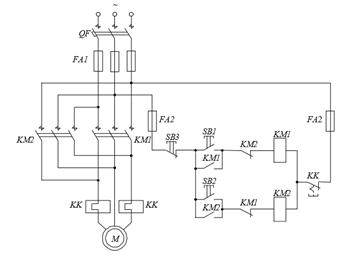
Рисунок 8 - Принципиальная схема управления
реверсом АД с короткозамкнутым ротором
В схеме (см. рис. 8) предусмотрена
также защита от перегрузок АД (реле KK) и коротких замыканий в цепях статора
(автоматический выключатель QF) и управления (предохранители FA). Кроме того, в
ней обеспечивается и нулевая защита от исчезновения (снижения) напряжения сети
(контакторы KM1 и KM2). Пуск двигателя в условном направлении «Вперед» или
«Назад» осуществляется нажатием соответственно кнопки SB1 или SB2, что приводит
к срабатыванию контактора KM1 или KM2 и подключению АД к сети (при включенном
автоматическом выключателе QF). Для обеспечения реверса или торможения
двигателя сначала нажимается кнопка SB3, что приводит к отключению включенного
до тех пор контактора (например, KM1), а затем - кнопка SB2, что приводит к
включению контактора KM2 и подаче на АД напряжения питания с другим
чередованием фаз. После этого магнитное поле двигателя изменяет свое
направление вращения и начинается процесс реверса, состоящий из двух этапов -
торможения противовключением и разбега в противоположную сторону. В случае
необходимости только затормозить двигатель при достижении им нулевой скорости
следует вновь нажать кнопку SB3, что приведет к отключению его от сети и
возвращению схемы в исходное положение. Если кнопку SB3 не нажимать, последует
разбег АД в другую сторону, т.е. его реверс. Во избежание короткого замыкания в
цепи статора, которое может возникнуть в результате одновременного ошибочного
нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается
специальная механическая блокировка - рычажная система, которая предотвращает
одновременное включение двух контакторов. В дополнение к механической в такой
схеме используется типовая электрическая блокировка, применяемая в реверсивных
схемах управления, которая заключается в перекрестном включении размыкающих
контактов аппарата KM1 в цепь катушки аппарата KM2, и наоборот. Отметим, что
повышению надежности работы электропривода и удобства его в эксплуатации
способствует использование в схеме управления воздушного автоматического
выключателя QF, который исключает возможность работы привода при обрыве одной
фазы и однофазном коротком замыкании, как это может иметь место при
использовании предохранителей.
Заключение
В ходе данного курсового проекта мной
были произведенные расчёты асинхронного двигателя (АД). Проверка его различных
характеристик: на нагрев и на падение напряжения, с сохранением рабочих
параметров в пределах нормы. В процессе расчёта АД мной были изучены тонкости
двигателей данного типа, их структура. Узнал причины включения в пусковую цепь
резисторов, т.е. резистивного и прямого пуска. Выгоду работы трансформатора при
включении добавочного сопротивления. Рассчитал примерную экономию энергии при
данном методе.
Библиографический список
1. Чиликин М.Г.
Общий курс электропривода. 6-е изд./ М.Г. Чиликин, А.С. Сандлер. М.:
Энергоатомиздат, 1984.
. Москаленко В.В.
Электрический привод/ В.В. Москаленко. М.: Мастерство, 2006.
. Вольдек А.И.
Электрические машины/ А.И. Вольдек. Л.: Энергия, 1990.
. Касаткин А.С.
Электротехника/ А.С. Касаткин, М.В. Немцов. М.: Высшая школа, 2000.
. Справочник по
электрическим машинам/ Под общ. ред. И.П. Копылова, Б.К. Клокова. М.:
Энергоатомиздат, 1998.