Синтез систем электропривода на принципах модального управления
Министерство
образования и науки Российской Федерации
Государственное
бюджетное образовательное учреждение высшего профессионального образования
"Комсомольский-на-Амуре
государственный технический университет"
Факультет
электротехнический
Кафедра
ЭПАПУ
Расчетно-графическое
задание
по
дисциплине "Современные принципы построения электроприводов"
Вариант-2.21
Синтез
систем ЭП на принципах модального управления
Студент группы 9ЭП
А.А. Калинин
Преподаватель
А.И. Горькавый
Содержание
Задание
Исходные данные
1. Детализированная
структурная схема объекта управления
. Векторно-матричное
описание ЭП
. Передаточные функции и
коэффициенты передач исходной системы
. Расчет модального регулятора при
настройке системы на стандартную форму Баттерворта
. Передаточные функции и
коэффициенты передач системы "объект - регулятор"
. Расчет модального ПИ - регулятора
. Расчет наблюдающего устройства
полного порядка системы "объект - наблюдатель - регулятор"
. Расчет коэффициента передачи
прямой связи по возмущающему воздействию, исключающего влияние возмущения на
выходную координату в установившемся режиме
Задание
. По заданной структурной схеме составить
детализированную структурную схему объекта управления.
2. Определить векторно-матричное описание:
записать уравнение состояния, вектор состояния, матрицу объекта, матрицу входа,
матрицу выхода, сигналы входа и возмущения.
. Определить передаточные функции объекта
по задающему и возмущающему воздействиям, определить коэффициенты передач по
задающему и возмущающему воздействиям.
. Определить матрицу коэффициентов
модального регулятора исходя из настройки на стандартную форму Баттерворта.
Составить структурную схему системы объект-регулятор.
. Определить передаточные функции и
коэффициенты передач системы объект-регулятор по задающему и возмущающему
воздействиям.
. Расчитать ПИ-регулятор при сохранении
заданной стандартной настройки. Привести структурную схему.
. Расчитать наблюдающее устройство
полного порядка. Модальный регулятор при этом настраивать на стандартную форму.
Привести структурную схему системы объект-наблюдатель-регулятор.
. Определить коэффициент передачи прямой
связи по возмущающему воздействию, исключающей влияние влияние возмущения на
входную координату в установившемся режиме. Привести структурную схему.
1. Детализированная структурная
схема объекта управления
Исходные данные
k1=5; k4=5;
T3=5.
ω0=6;
ω0н=16.
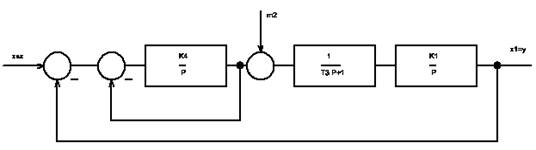
Рисунок 1 - Исходная детализированная
структурная схема объекта

Рисунок 2 - Исходная
детализированная структурная схема исходной системы
2. Векторно-матричное описание ЭП
Уравнения состояния объекта:

Вектор состояния объекта:

Матрица объекта:

Матрица входов:

Матрица возмущений:
 .
.
Матрица выходов:
 .
.
3. Передаточные функции и
коэффициенты передач исходной системы
Определить передаточные функции объекта по
задающему и возмущающему воздействиям, определить коэффициенты передач по
задающему и возмущающему воздействиям.
Единичная матрица:
 .
.
Характеристическая матрица объекта:
 .
.
Определитель характеристической
матрицы объекта:
 ,
,
Передаточная функция объекта по
задающему воздействию:
 .
.
Коэффициент передачи по задающему
воздействию:
 .
.
Передаточная функция по возмущающему
воздействию:
 .
.
Коэффициент передачи по возмущающему
воздействию:

Рисунок 3 - Переходная
характеристика исходной системы по задающему воздействию

Рисунок 4 - Переходная
характеристика исходной системы по возмущающему воздействию
Из рисунков 2 и 3 видно, что система
устойчива. Переходный процесс колебательный.
4. Расчет модального регулятора при
настройке системы на стандартную форму Баттерворта
Матрица коэффициентов модального регулятора
 .
.
Матрица замкнутой системы по полному
вектору состояния:
 .
.
Характеристическая матрица замкнутой
системы по полному вектору состояния:
 .
.
Определитель характеристической
матрицы замкнутой системы по полному вектору состояния:
Стандартная форма Баттерворта для
системы третьего порядка имеет вид:
 .
.
Тогда приравнивая коэффициенты при
соответствующих степенях получим систему уравнений:
Решая систему, получаем:
 ,
,
 ,
,
 .
.
Детализированная структурная схема
системы "объект - регулятор" будет иметь вид, приведенный на рисунке
4.

Рисунок 5 - Детализированная
структурная схема системы "объект - регулятор"
5. Передаточные функции и
коэффициенты передач системы "объект - регулятор"
Матрица замкнутой системы по полному вектору
состояния:

 .
.
Передаточная функция системы
"объект - регулятор" по задающему воздействию:

Коэффициент передачи по задающему
воздействию:
 .
.
Передаточная функция системы по
возмущающему воздействию:

Коэффициент передачи по возмущающему
воздействию
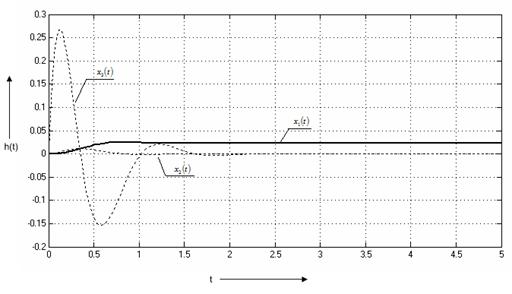
Рисунок 6 - Переходная
характеристика системы "объект - регулятор" по задающему воздействию
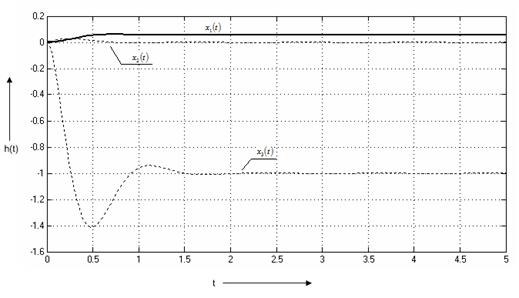
Рисунок 7 - Переходная
характеристика системы "объект - регулятор" по возмущающему
воздействию
6. Расчет модального ПИ - регулятора
Структурная схема системы с модальным ПИ -
регулятором будет иметь вид, приведенный на рисунке 7.
Рисунок 8 - Структурная схема
системы с модальным ПИ- регулятором
Матрица коэффициентов:
 .
.
Матрица замкнутой системы с
модальным ПИ - регулятором:
 .
.
Матрица входов:
 .
.
Матрица возмущений:
 .
.
Матрица выходов:
 .
.
Единичная матрица:
 .
.
Характеристическая матрица замкнутой
системы:
 .
.
Определитель характеристической
матрицы:
Стандартная форма Баттерворта для
системы четвертого порядка с ПИ-регулятором имеет вид:
 .
.
Тогда, приравнивая коэффициенты при
соответствующих степенях, получим систему уравнений:

Решая систему уравнений, получаем:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Матрица замкнутой системы по полному
вектору состояния:

Передаточная функция системы по
задающему воздействию:
 .
.
Коэффициент передачи по задающему
воздействию:
 .
.
Передаточная функция системы по
возмущающему воздействию:
Коэффициент передачи по возмущающему
воздействию
 .
.
По передаточной функции системы по
задающему воздействию выбираем такое значение k, при
котором оно не оказывает существенного влияния на динамику переходных
процессов, например:
 ,
,
 .
.
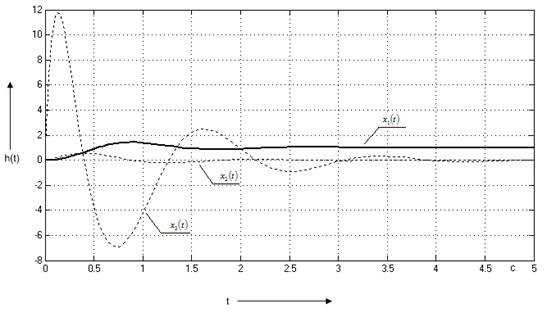
Рисунок 9 - Переходная
характеристика системы с модальным ПИ - регулятором по задающему воздействию
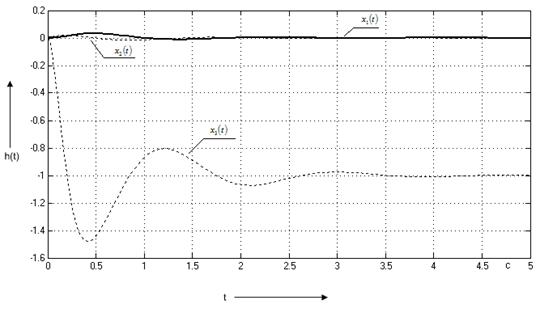
Рисунок 10 - Переходная
характеристика системы с модальным ПИ - регулятором по возмущающему воздействию
Переходные характеристики по
задающему и возмущающему воздействиям системы с модальным ПИ - регулятором приведены
на рисунках 9 и 10.
7. Расчет наблюдающего устройства
полного порядка системы "объект - наблюдатель - регулятор"
Оценим наблюдаемость объекта:
 ,
,  ,
,
 .
.
Матрица наблюдаемости:
 .
.
Ранг матрицы наблюдаемости равен 3,
т.е. равен порядку системы, следовательно система наблюдаема.
Матрица наблюдателя:
 .
.
Определим коэффициенты наблюдающего
устройства при его настройке на Биноминальную стандартную форму.
 ,
,
 .
.
Характеристическая матрица
наблюдателя:

Определитель характеристической
матрицы наблюдателя:

Биноминальная стандартная форма для
системы третьего порядка с наблюдающим устройством имеет вид:
 .
.
Тогда приравнивая коэффициенты при
соответствующих степенях получим систему уравнений:

Решая систему, получаем:
Уравнение наблюдающего устройства
 .
.
Тогда система уравнений наблюдающего
устройства:
По полученным уравнениям
наблюдающего устройства можно построить структурную схему
"наблюдателя". Структурная схема системы "объект - наблюдатель -
регулятор" приведена на рисунке 11.
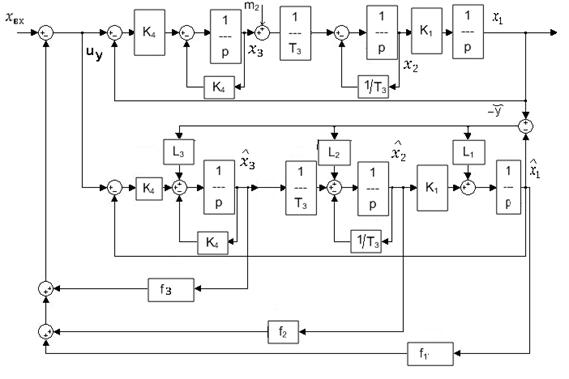
Рисунок 11 - Структурная схема
системы "объект - наблюдатель - регулятор"
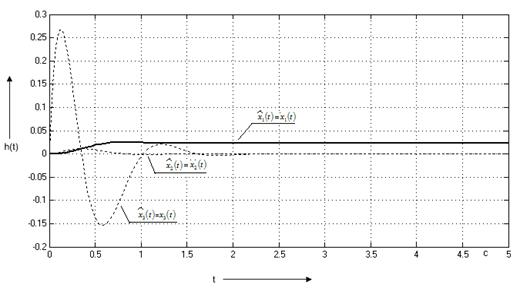
Рисунок 12 - Переходная
характеристика системы "объект - наблюдатель - регулятор" по
задающему воздействию

Рисунок 13 - Переходная
характеристика системы "объект - наблюдатель - регулятор" по
возмущающему воздействию
Это наблюдающее устройство
рассчитано только на устранение ошибок от несовпадения н. у. Если на объект
действует возмущающее воздействие и оно неизмеряемое, то наблюдающее устройство
будет оценивать координаты с ошибками. Поэтому установившиеся значения выходных
переменных наблюдателя и объекта несколько различаются.
8. Расчет коэффициента передачи
прямой связи по возмущающему воздействию, исключающего влияние возмущения на
выходную координату в установившемся режиме
электропривод матрица вектор
Структурная схема системы "объект -
регулятор" с компенсационным каналом по возмущающему воздействию имеет вид
приведенный на рисунке 14.
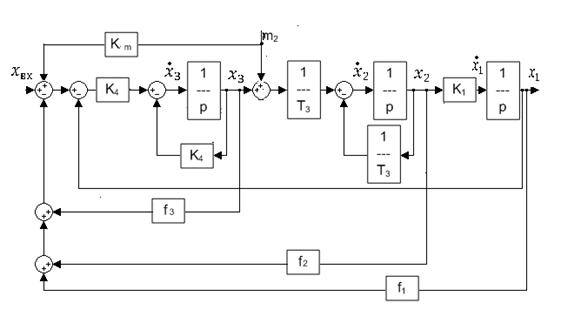
Рисунок 14 - Система "объект - регулятор"
с компенсационным каналом по возмущающему воздействию
С введением компенсационного канала изменится
только матрица возмущения и она будет иметь вид:
 .
.
Тогда передаточная функция системы с
компенсационным каналом по возмущающему воздействию:
Для того чтобы система была
астатической (инвариантной) к возмущению в установившемся режиме необходимо,
чтобы коэффициент передачи по возмущению был равен нулю, тогда:
 ,
,
Отсюда:
 ,
,
Из рисунков 15 и 16 видно, что при
введении коэффициента передачи прямой связи по возмущающему воздействию система
стала астатической по возмущению, но сохранила прежнюю реакцию на задающее
воздействие.
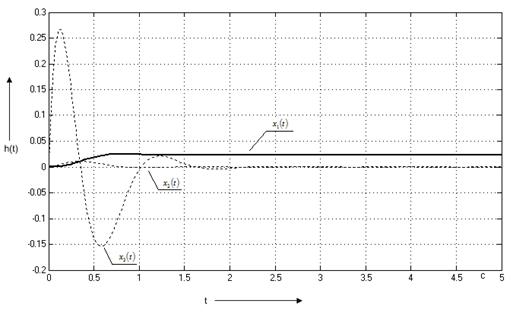
Рисунок 15 - Переходная
характеристика системы по задающему воздействию

Рисунок 16 - Переходная
характеристика системы по возмущающему воздействию
Таким образом, работа выполнена.