 -
повторяющееся импульсное обратное напряжение.
-
повторяющееся импульсное обратное напряжение.
Расчет
потерь в выпрямителе для установившегося режима работы ЭП:

где
 - для мостовой трехфазной схемы;
- для мостовой трехфазной схемы;  - динамическое сопротивление полупроводникового
прибора в проводящем состоянии, Ом;
- динамическое сопротивление полупроводникового
прибора в проводящем состоянии, Ом;  - прямое
падение напряжения , В, на полупроводниковом приборе при токе 50 мА
- прямое
падение напряжения , В, на полупроводниковом приборе при токе 50 мА  для диода;
для диода;  - число
полупроводниковых приборов в схеме.
- число
полупроводниковых приборов в схеме.
Тепловой
расчет параметров охладителя выпрямителя следует проводить аналогично
приведенному выше расчету для инвертора.
Максимально
допустимое переходное сопротивление охладитель - окружающая среда в расчете на
выпрямитель:
 ,
,
где
 - термическое переходное сопротивление корпус -
поверхность теплопроводящей пластины модуля, 0С/Вт.
- термическое переходное сопротивление корпус -
поверхность теплопроводящей пластины модуля, 0С/Вт.
Температура
кристалла:

где  -
термическое переходное сопротивление кристалл - корпус для одного
полупроводникового прибора модуля, 0С/Вт;
-
термическое переходное сопротивление кристалл - корпус для одного
полупроводникового прибора модуля, 0С/Вт;  - количество полупроводниковых приборов в модуле.
- количество полупроводниковых приборов в модуле.
Условие
 , следовательно, выбранный тиристор выбран верно.
, следовательно, выбранный тиристор выбран верно.
Расчет
параметров охладителя.
Предварительно
определяем требуемое суммарное переходное тепловое сопротивление охладитель -
окружающая среда в расчете на суммарную мощность, выделяемую всеми
устанавливаемыми на данный охладитель силовыми полупроводниковыми приборами
(модулями). При установке модулей (выпрямитель, инвертор) на общий охладитель
требуемое сопротивление определяется аналогично суммарному сопротивлению при
параллельном включении резисторов:
Как
правило, на один охладитель удается установить все приборы при мощности
инвертора до 55 кВт. Критерием перехода к применению двух и более охладителей
служит длина требуемого профиля охладителя, которая для эффективного
использования поверхности профиля должна быть не более 1 м.
Расчет
параметров охладителя для модуля IGBT/FWD:
Геометрические
параметры охладителя:

Площадь
охладителя (рисунок 5), применяемого в рассматриваемом ПЧ, участвующая в
излучении тепла, определяется по формуле:
 ,
,
где
 - габаритные размеры профиля.
- габаритные размеры профиля.
Площадь
данного охладителя, участвующая в конвекции:
 ,
,
где
m - число ребер.
Переходное
сопротивление излученного тепла:
 ,
,
где
 - температура поверхности охладителя, К;
- температура поверхности охладителя, К;  - температура окружающего воздуха, К;
- температура окружающего воздуха, К;
 ;
;  - коэффициент излучения поверхности (
- коэффициент излучения поверхности ( для алюминия).
для алюминия).
Рисунок
5 - охладитель (гребенка).
Переходное
температурное сопротивление теплопередачи конвекцией (при d<1
м):
 ,
,
где
 - коэффициент ухудшения теплоотдачи (конвекции) при
расстоянии между ребрами охладителя 20 мм и менее.
- коэффициент ухудшения теплоотдачи (конвекции) при
расстоянии между ребрами охладителя 20 мм и менее.
Переходное
температурное сопротивление охладитель - окружающая среда при естественном
охлаждении:

Таким
образом, рассчитанный охладитель обладает переходным термическим сопротивлением
 .
.
Расчет
параметров охладителя для выпрямителя:
Для
охлаждения силовых диодов используем два охладителя: один - для анодной группы
диодов, и один - для катодной группы диодов.
Расчет
параметров охладителей для выпрямителя аналогичен расчету параметров охладителя
инвертора.
Геометрические
параметры охладителя:

 ,
,
 ,
,
 ,
,


Таким
образом, рассчитанный охладитель обладает переходным термическим сопротивлением
 .
.
Расчет
фильтра.
Коэффициент
пульсаций на входе фильтра (отношение амплитуды напряжения к среднему
значению):
где
m - пульсность схемы выпрямления (m=6
для трехфазной мостовой схемы).
Параметр
сглаживания LC - фильтра:

где
 - коэффициент сглаживания по первой гармонике;
- коэффициент сглаживания по первой гармонике;  - частота сети, Гц.
- частота сети, Гц.
Значения
коэффициента сглаживания лежат в диапазоне от 3 до 12.
Индуктивность
дросселя LC - фильтра для обеспечения коэффициента мощности на
входе выпрямителя  определяется из следующих условий:
определяется из следующих условий:
где
 - номинальный средний ток звена постоянного тока.
- номинальный средний ток звена постоянного тока.
Выбираем
3 дросселя Д269 с индуктивностью L0=0.6 мГн
и номинальным током Iн=32 А, соединенных последовательно. Итого суммарная
индуктивность L=1.8 мГн.
Тогда
необходимая емкость будет равна С=2030 мкФ.
Емкость
конденсаторов, необходимая для протекания реактивного тока нагрузки инвертора,
находится из выражения:

где
 - амплитудное значение тока в фазе двигателя, А;
- амплитудное значение тока в фазе двигателя, А;  - угол сдвига между первой гармоникой фазного
напряжения и фазного тока;
- угол сдвига между первой гармоникой фазного
напряжения и фазного тока;  -
коэффициент пульсаций;
-
коэффициент пульсаций;  - частота ШИМ, Гц.
- частота ШИМ, Гц.
Для
практической реализации фильтра используют конденсаторы с наибольшим значением
емкости С0i (i=1 или 2).
Таким
образом, необходимая емкость С=2 мФ.
Выбираем
конденсаторы К50-35 2200 мкФ х 63В. Соединяем 9 конденсаторов последовательно
для получения необходимого рабочего напряжения.
Амплитуда
тока, протекающего через конденсаторы фильтра на частоте пульсаций
выпрямленного тока (по первой гармонике):

Расчет
снаббера.
Так
как IGBT коммутируется с высокой скоростью, то напряжение UСЕ быстро возрастает, особенно при запирании
транзистора, и может достигнуть критического значения, способного вызвать
пробой либо коллектора либо затвора транзистора. Чтобы минимизировать
превышение напряжения и предотвратить аварию IGBT, требуется
установка снаббера (демпфирующей цепи).

Рисунок
6 - схема снаббера.
Особенности
схемы: 1 - малое число элементов; 2 - низкие потери мощности; 3 - подходит для
конденсаторов средней и малой емкостей.
Сопротивление
резистора зависит от емкости конденсатора С и частоты коммутации IGBT fSW. Расчетная формула для выбора мощности резистора цепи
снаббера имеет следующий вид:

где U - напряжение коллектор-эмиттер в установившемся
режиме, В, которое равно напряжению звена постоянного тока преобразователя
системы АИН с ШИМ; ДU - перенапряжение, В.
Выбор сопротивления резистора производится из
условия минимума колебаний тока коллектора при включении IGBT:

где
 - индуктивность цепей снаббера, Гн, которая должна
быть не более 10 нГн, С - емкость снаббера, Ф.
- индуктивность цепей снаббера, Гн, которая должна
быть не более 10 нГн, С - емкость снаббера, Ф.
Таким
образом, выбираем резистор МЛТ1.1х0,8 Ом
Ток,
протекающий через диод снаббера, импульсный. Он почти равен отключаемому току
коллектора и длится до 1 мкс.
Диод
должен быть высокочастотным со временем восстановления запирающих свойств trr=0.3 мкс и менее.
Таким
образом, выбираем диод серии 2Д2990А [4] со следующими параметрами: IПР
MAX=20 A; UОБР=600 В;
tВОССТ=0.15
мкс; fдоп=200
кГц. Используем два диода, включенных параллельно.
Значение
ДU зависит от многих факторов, оно не должно превышать
60 В.
ДU
зависит от индуктивности L1 проводов
между электролитическим конденсатором и снаббером (значение L1 должно быть 50 нГн или менее);
ДU
существенно зависит от индуктивности L2 цепей снаббера (значение L2 должно быть 10 нГн или менее);
ДU
незначительно зависит от сопротивления резистора Rg на
входе затвора и от температуры;
ДU не
определяется емкостью снаббера.
Следовательно,
для ограничения ДU важно ограничить индуктивности L1 и L2 путем
уменьшения длины проводов и их бифилярного монтажа.
Емкость
конденсатора снаббера определяется напряжением второго броска ДU’,
который не должен превышать 25 В. Выражение для расчета емкости:

где
L1 -
индуктивность проводов между электролитическим конденсатором и IGBT
- модулем; Ic - отключаемый ток.
Таким
образом, выбираем конденсаторы пленочные типа К78-2 со следующими параметрами:
С=5.6 нФ, U=1600 В. Соединяем параллельно 11 конденсаторов для
получения емкости С=61.6 нФ.
двигатель электропривод энергетический кабель
2. Расчет статических и динамических характеристик для разомкнутой
системы регулируемого электропривода
2.1 Расчет естественных механических и электромеханических характеристик
системы регулируемого электропривода
При создании электроприводов с двигателями переменного тока часто
сталкиваются с проблемой определения параметров асинхронного двигателя, которые
необходимы для проектирования и настройки системы управления электроприводом, а
также для моделирования переходных процессов в асинхронном электроприводе с ПЧ.
Одним их возможных вариантов определения параметров АД является метод
использования конструктивных параметров электрической машины, но он обладает
существенным недостатком, который заключается в том, что разработчикам
электропривода эти параметры не всегда доступны, и, кроме того, необходимо
располагать соответствующими методиками расчёта.
Для расчета электромеханических и механических характеристик асинхронного
двигателя необходимо воспользоваться его математической моделью, которая в
общем случае представляется различными схемами замещения. Наиболее простой и
удобной для инженерных расчетов асинхронного двигателя является Т-образная
схема замещения, рис.7.
Рисунок 7 - Схема замещения асинхронного двигателя.
Ток холостого хода асинхронного двигателя можно найти по следующему
выражению:
 , (2.1)
, (2.1)
Где
 - номинальный ток статора двигателя;
- номинальный ток статора двигателя;
 - ток
статора двигателя при частичной загрузке;
- ток
статора двигателя при частичной загрузке;
Коэффициент
мощности при частичной загрузке
 ;
;
Коэффициент
загрузки двигателя
 .
.
Коэффициент
мощности и КПД при частичной загрузке в технической литературе приводятся
редко, а для целого ряда серий электрических машин такие данные в справочной
литературе отсутствуют. Эти параметры можно определить, руководствуясь
следующими соображениями:
−
современные асинхронные двигатели проектируются таким образом, что наибольший
КПД достигается при загрузке на 10-15% меньше номинальной. Двигатели рассчитываются
так потому, что большинство из них в силу стандартной дискретной шкалы
мощностей работают с некоторой недогрузкой. Поэтому КПД при номинальной
нагрузке и нагрузке  практически равны между собой, т.е.
практически равны между собой, т.е.
−
коэффициент мощности при той же нагрузке значительно
отличается от коэффициента мощности при номинальной нагрузке, причем это
отличие в значительной степени зависит от мощности двигателя.
 - КПД
при частичной загрузке;
- КПД
при частичной загрузке;
Из
формулы Клосса определяем соотношение, которое необходимо для расчета
критического скольжения:
 ,
,
где
 - значение коэффициента b находится в диапазоне 0,6 - 2,5, поэтому в первом приближении
принимаем b =1.
- значение коэффициента b находится в диапазоне 0,6 - 2,5, поэтому в первом приближении
принимаем b =1.
 ;
;
Определяем коэффициент:

Тогда
активное сопротивление ротора, приведенное к обмотке статора асинхронного
двигателя
 ;
;
Активное сопротивление статорной обмотки можно определить по следующему
выражению

Определим
параметр g, который позволит найти индуктивное сопротивление
короткого замыкания  :
:
 .
.
Тогда
 ,
,
Для
того чтобы выделить из индуктивного сопротивления ХКH
сопротивления рассеяния фаз статора и ротора, необходимо воспользоваться
соотношениями, которые справедливы для серийных асинхронных двигателей.
Индуктивное
сопротивление роторной обмотки, приведенное к статорной, может быть рассчитано
 ,
,
Индуктивное сопротивление статорной обмотки может быть определено по следующему
выражению
 ,
,
 .
.
Согласно
векторной диаграмме ЭДС ветви намагничивания  ,
наведенная потоком воздушного зазора в обмотке статора в номинальном режиме,
равна
,
наведенная потоком воздушного зазора в обмотке статора в номинальном режиме,
равна
 ,
,
где
Тогда
индуктивное сопротивление намагничивания
 .
.
Используя параметры схемы замещения, произведем расчет механических и
электромеханических характеристик.
Электромеханическая характеристика при частотном управлении АД,
определяется зависимостью приведенного тока ротора от скольжения
 , (2.2)
, (2.2)
где
 - фазное напряжение обмоток статора асинхронного
двигателя;
- фазное напряжение обмоток статора асинхронного
двигателя;
 -
относительное значение частоты питающего напряжения.
-
относительное значение частоты питающего напряжения.
Задаваясь
значениями скольжения можно рассчитать соответствующее значение тока и
воспользовавшись формулой  получить соответствующее значение угловой скорости.
получить соответствующее значение угловой скорости.
Полагая, что ток намагничивания двигателя имеет полностью реактивный
характер, выражение для электромеханической характеристики, описывающей
зависимость тока статора от скольжения, запишется следующим образом
 ,
,
где
 будет меняться в зависимости от величины питающего
напряжения, согласно выражению
будет меняться в зависимости от величины питающего
напряжения, согласно выражению
 ,
,
 .
.
Задаваясь
скольжением  и принимая во внимание, что для естественной
характеристики
и принимая во внимание, что для естественной
характеристики по формуле (2.2) рассчитываем естественные
электромеханические характеристики АД в двигательном и генераторном режимах,
приведенные на рис.8. Сплошной линией представлена зависимость
по формуле (2.2) рассчитываем естественные
электромеханические характеристики АД в двигательном и генераторном режимах,
приведенные на рис.8. Сплошной линией представлена зависимость  , а пунктирной линией зависимость
, а пунктирной линией зависимость  .
.

Рисунок 8 - Естественные электромеханические характеристики АД
Механическую характеристику асинхронного двигателя при переменных
значениях величины и частоты напряжения питания можно рассчитать по следующему
выражению
 . (2.3)
. (2.3)
Механическая
характеристика асинхронного двигателя имеет критический момент и критическое
скольжение, которые определяются по следующим формулам (2.4) и (2.5)
 (2.4)
(2.4)
 Ом -
индуктивное сопротивление короткого замыкания.
Ом -
индуктивное сопротивление короткого замыкания.
 .(2.5)
.(2.5)
Знак (+) означает, что критический момент и скольжение относятся к
двигательному режиму, знак (-) - к генераторному режиму.
Расчет механической характеристики проводим по формуле Клосса:
 , (2.6)
, (2.6)
Где
 - коэффициент, равный отношению активного
сопротивления статора к активному приведенному сопротивлению ротора;
- коэффициент, равный отношению активного
сопротивления статора к активному приведенному сопротивлению ротора;
 -
номинальная скорость;
-
номинальная скорость;
 -
номинальный момент;
-
номинальный момент;
На
рис.9 представлена естественная механическая характеристика  для асинхронного двигателя.
для асинхронного двигателя.

Рисунок 9 - Естественная механическая характеристика АД
Рабочий
участок естественной характеристики обладает высокой жесткостью, модуль которой
при  практически постоянен, а при
практически постоянен, а при  с возрастанием момента двигателя постепенно
уменьшается и при
с возрастанием момента двигателя постепенно
уменьшается и при  становится равным нулю. Дальнейшее снижение скорости
приводит к уменьшению электромагнитного момента, что соответствует, изменению
знака статической жесткости
становится равным нулю. Дальнейшее снижение скорости
приводит к уменьшению электромагнитного момента, что соответствует, изменению
знака статической жесткости , которая
становится положительной. Этот участок характеристики вплоть до
, которая
становится положительной. Этот участок характеристики вплоть до  обычно не используется, и форма характеристики в этой
области для таких двигателей существенного значения не имеет. Как показано на
рис.8, двигательному режиму работы соответствуют скольжения от
обычно не используется, и форма характеристики в этой
области для таких двигателей существенного значения не имеет. Как показано на
рис.8, двигательному режиму работы соответствуют скольжения от  до
до  .
.
Если
ротор двигателя вращать против поля ( ,
, ), двигатель переходит в тормозной режим
противовключения. В этом режиме на естественной характеристике поток снижен,
), двигатель переходит в тормозной режим
противовключения. В этом режиме на естественной характеристике поток снижен,  весьма мал, поэтому двигатель развивает небольшие
значения тормозного момента, потребляя из сети в основном реактивный ток,
превышающий номинальный в 5-10 раз. Поэтому режим противовключения на
естественной характеристике двигателя также на практике не используется.
весьма мал, поэтому двигатель развивает небольшие
значения тормозного момента, потребляя из сети в основном реактивный ток,
превышающий номинальный в 5-10 раз. Поэтому режим противовключения на
естественной характеристике двигателя также на практике не используется.
Область (
( ) соответствует генераторному режиму работы
параллельно с сетью. При
) соответствует генераторному режиму работы
параллельно с сетью. При ,подводимая к двигателю механическая энергия частично
теряется в двигателе в виде теплоты, а в основном отдается в сеть. Однако при
дальнейшем возрастании скорости и соответствующем увеличении частоты тока
ротора происходит постепенное уменьшение коэффициента мощности двигателя,
который при
,подводимая к двигателю механическая энергия частично
теряется в двигателе в виде теплоты, а в основном отдается в сеть. Однако при
дальнейшем возрастании скорости и соответствующем увеличении частоты тока
ротора происходит постепенное уменьшение коэффициента мощности двигателя,
который при становится равным нулю. При скорости
становится равным нулю. При скорости , соответствующей
, соответствующей  ,
отдаваемая в сеть активная мощность равна нулю, т. е. вся подведенная к
двигателю механическая энергия теряется в виде теплоты в двигателе. Поэтому при
,
отдаваемая в сеть активная мощность равна нулю, т. е. вся подведенная к
двигателю механическая энергия теряется в виде теплоты в двигателе. Поэтому при имеет место режим рекуперативного торможения, при
имеет место режим рекуперативного торможения, при  наступает режим динамического торможения, а при
наступает режим динамического торможения, а при двигатель начинает потреблять энергию из сети, как и
при режиме противовключения.
двигатель начинает потреблять энергию из сети, как и
при режиме противовключения.
Электромеханические
естественные характеристики асинхронного двигателя  и
и  показаны
на рис. 8. Зависимость построена с помощью соотношения (сплошная кривая). В
ней отражены все рассмотренные выше особенности зависимости
показаны
на рис. 8. Зависимость построена с помощью соотношения (сплошная кривая). В
ней отражены все рассмотренные выше особенности зависимости  Кривая в
основном повторяет форму кривой так как
определяется соотношением
Кривая в
основном повторяет форму кривой так как
определяется соотношением  . Она показана на рис.8, штриховой кривой, которая
имеет наиболее значительные отклонения от кривой в
области идеального холостого хода. Действительно, при
. Она показана на рис.8, штриховой кривой, которая
имеет наиболее значительные отклонения от кривой в
области идеального холостого хода. Действительно, при 
 ток
ротора равен нулю, а статор потребляет из сети ток холостого хода
ток
ротора равен нулю, а статор потребляет из сети ток холостого хода  , основной составляющей которого является
намагничивающий ток
, основной составляющей которого является
намагничивающий ток По мере роста тока ротора эти кривые сближаются.
По мере роста тока ротора эти кривые сближаются.
Двигатель
с фазным ротором благодаря выведенным на контактные кольца выводам роторной
обмотки обеспечивает возможность изменения параметров цепи ротора путем
введения различных добавочных сопротивлений. Наиболее широко используется
включение в цепь ротора добавочных активных сопротивлений, как показано на При
этом в соответствии с максимум момента Мк не претерпевает изменений,
а критическое скольжение увеличивается пропорционально суммарному сопротивлению
роторной цепи  . Рассматривая эти характеристики, можно установить,
что введение добавочных активных сопротивлений в цепь ротора при пуске
двигателя и при торможении противовключением является эффективным средством
ограничения тока и повышения момента двигателя. Переключением сопротивлений
можно обеспечить работу двигателя во всех режимах в пределах рабочего участка
механических характеристик. В частности, плавным уменьшением сопротивления
. Рассматривая эти характеристики, можно установить,
что введение добавочных активных сопротивлений в цепь ротора при пуске
двигателя и при торможении противовключением является эффективным средством
ограничения тока и повышения момента двигателя. Переключением сопротивлений
можно обеспечить работу двигателя во всех режимах в пределах рабочего участка
механических характеристик. В частности, плавным уменьшением сопротивления  торможении противовключением и последующем пуске в
противоположном направлении можно обеспечить постоянство тормозного, и
пускового моментов двигателя в этих режимах.
торможении противовключением и последующем пуске в
противоположном направлении можно обеспечить постоянство тормозного, и
пускового моментов двигателя в этих режимах.
Модуль
жесткости рабочего участка механической характеристики при введении
сопротивления находится при данном М в обратно пропорциональной зависимости от  поэтому реостатные характеристики двигателя при
больших добавочных сопротивлениях имеют невысокую жесткость.
поэтому реостатные характеристики двигателя при
больших добавочных сопротивлениях имеют невысокую жесткость.
.2 Расчет искусственных механических и электромеханических характеристик
системы регулируемого электропривода для заданного диапазона регулирования
скорости
Частоты
напряжения преобразователя,  Гц,
Гц,  Гц,
Гц,  Гц,
Гц,  Гц.
Гц.
Возможность частотного регулирования скорости
асинхронного двигателя - регулирование путем изменения частоты питающего
напряжения - вытекает из того обстоятельства, что скорость вращения
электромагнитного поля статора пропорционально частоте питающего напряжения
 (2.7)
(2.7)
Следует
также учесть, что поскольку с изменением частоты питающего напряжения
изменяется и величина потока двигателя  ,
,
 (2.8)
(2.8)
то
в большинстве случаев одновременно с изменением частоты питающего
напряжения необходимо регулировать и его амплитуду. Необходимость
регулирования напряжения при уменьшении частоты вниз от номинальной связана с
тем, что из-за уменьшения индуктивного сопротивления обмоток АД ток
намагничивания будет возрастать, что приведет к насыщению магнитопровода
двигателя и его перегреву. Регулирование напряжения следует производить таким
образом, чтобы скольжение двигателя было минимальным.
Для
реализации частотного способа регулирования скорости асинхронный
короткозамкнутый двигатель включается в питающую сеть с параметрами  и
и  через
преобразовать частоты UF (см.рис.10). В качестве преобразователей частоты в настоящее
время используются, в основном, полупроводниковые преобразователи частоты.
через
преобразовать частоты UF (см.рис.10). В качестве преобразователей частоты в настоящее
время используются, в основном, полупроводниковые преобразователи частоты.

Рисунок 10 - Схема включения асинхронного двигателя с
питанием от преобразователя частоты
При
частотном регулировании величина относительного скольжения  зависит как от разности скоростей вращающегося
электромагнитного поля и ротора - абсолютного скольжения
зависит как от разности скоростей вращающегося
электромагнитного поля и ротора - абсолютного скольжения  ,так и от относительного значения
,так и от относительного значения частоты питающего напряжения
частоты питающего напряжения
 , (2.9)
, (2.9)
 (2.10)
(2.10)
Здесь ,
, ,
,  -
регулируемые значения частоты напряжения статора и соответствующие значения
скорости вращения и скольжения;
-
регулируемые значения частоты напряжения статора и соответствующие значения
скорости вращения и скольжения;
 и
и  - номинальные значения частоты статора и скорость
поля, соответствующие паспортным данным двигателя.
- номинальные значения частоты статора и скорость
поля, соответствующие паспортным данным двигателя.
С
учетом (2.7)
 (2.11)
(2.11)
Для
анализа электромеханических характеристик двигателя при частотном регулировании.
В отличие от ранее приведенной схемы замещения в данном случае приходится
учитывать, что реактивные сопротивления двигателя зависят от частоты питающего
напряжения и изменяются с изменением частоты.
 ;
;  ;
;
 ;
;  . (2.12)
. (2.12)
В
связи с ним нужно заметить, что при номинальной частоте 50Гц индуктивное
сопротивление контура намагничивания  на
порядок (для машин малой мощности) или на два порядка (для машин большой
мощности) больше, чем активное сопротивление обмотки статора r1. Поэтому при
анализе и расчете электромеханических характеристик асинхронных двигателей,
работающих при постоянной номинальной частоте питающего напряжения,
сопротивлением r1 обычно пренебрегают. Если же двигатель работает с переменной
частотой напряжения, то при снижении частоты сопротивление r1, становится
соизмеримым с реактивными сопротивлениями машины и учет сопротивления г1,
является необходимым.
на
порядок (для машин малой мощности) или на два порядка (для машин большой
мощности) больше, чем активное сопротивление обмотки статора r1. Поэтому при
анализе и расчете электромеханических характеристик асинхронных двигателей,
работающих при постоянной номинальной частоте питающего напряжения,
сопротивлением r1 обычно пренебрегают. Если же двигатель работает с переменной
частотой напряжения, то при снижении частоты сопротивление r1, становится
соизмеримым с реактивными сопротивлениями машины и учет сопротивления г1,
является необходимым.
Мощность
скольжения, выделяемая в цепи ротора, расходуется на нагрев обмоток ротора как
следует из
 , откуда
, откуда
 . (2.13)
. (2.13)
Из
схемы замещения, учитывая, что отношения  и
и  гораздо меньше единицы и ими можно пренебречь,
определим значение
гораздо меньше единицы и ими можно пренебречь,
определим значение 
 . (2.14)
. (2.14)
Подставив
(2.13) в (2.14), получим формулу для механических характеристик при переменных
значениях величины и частоты напряжения питания
 (2.15)
(2.15)
Заметим, что если положить то формула (2.15) станет
идентичной формуле для механических характеристик нерегулируемого по частоте
асинхронного двигателя.
Положив ,найдем значения максимального момента и критического
скольжения
,найдем значения максимального момента и критического
скольжения
 (2.16)
(2.16)
 (2.17)
(2.17)
Знак (+) соответствует двигательному режиму, Знак
(-) - режиму рекуперативного торможения.
Анализируя
выражение (2.16), можно установить, что, если пренебрегать величиной активного
сопротивления статора ( ),то, для того чтобы при частотном регулировании
(уменьшении частоты вниз от номинальной) сохранять критический момент
постоянным, нужно величину напряжения изменять пропорционально
изменению частоты.
),то, для того чтобы при частотном регулировании
(уменьшении частоты вниз от номинальной) сохранять критический момент
постоянным, нужно величину напряжения изменять пропорционально
изменению частоты.
Соотношение для вентиляторного характера нагрузки имеет вид:

На
рисунке 9 представлены механические искусственные характеристики для данного
закона регулирования. На рисунке 11,12 электромеханические искусственные характеристики
для данного закона регулирования.

Рисунок
10 Электромеханические характеристики вентилятора 
Зависимость
скорости вращения ротора от тока статора.

Рисунок
11 Электромеханические характеристики вентилятора
Зависимость
скорости вращения ротора от тока ротора

Рисунок
12 - Механические характеристики при
3.
Расчет и выбор аппаратов защиты, сечения и типа кабеля
3.1
Выбор аппаратов защиты
Автоматические выключатели (АВ) обеспечивают одновременно функции
коммутации силовых цепей и защиты от электроприемников от перегрузок и коротких
замыканий. АВ имеют тепловой расцепитель и электродинамический расцепитель. АВ
выбирают по их номинальному току. Уставки токов расцепителей определяются по
следующим соотношениям:
Ток
уставки теплового расцепителя: Iт 1,25∙Iн;
1,25∙Iн;
Ток
уставки электродинамического расцепителя: Iэм1,2·Iпуск ,
где Iн - номинальный ток электроприемника;
Iпуск
- пусковой ток
электродвигателя.
Условия выбора плавкого предохранителя для защиты цепи управления:
 ,
,
где
 - номинальный ток плавкой вставки предохранителя, А;
- номинальный ток плавкой вставки предохранителя, А;
 -
длительно протекающий ток;
-
длительно протекающий ток;
 А;
А;
Выбираю
предохранитель типа ПР2-25, у которого  .
.
Условия
выбора автоматического выключателя для защиты силовой цепи:
.  ;
;
.  ,
,
где
 - номинальный ток расцепителя автоматического
выключателя, А;
- номинальный ток расцепителя автоматического
выключателя, А;
 -
номинальный ток срабатывания уставки в зоне КЗ.
-
номинальный ток срабатывания уставки в зоне КЗ.
Используя
справочную литературу, выбираем Выбираю выключатель серии ВА57Ф35, рассчитанный
для эксплуатации в электроустановках с номинальным рабочим напряжением до 380 V
переменного тока частоты 50 и 60 Гц и до 220 V постоянного тока.
 ,
,  .
.
3.2 Расчет и выбор сечения и типа кабеля для силовой цепи и цепи
управления
Выбор сечения провода производится на основании согласования длительно
допустимых токов с номинальным током расцепителя автоматического выключателя и номинальным током плавкой вставки
предохранителя.
Выбор провода для силовой цепи:

Выбираю
провод марки АВВГ 2х1.5, у которого 
 А.
А.
Выбор провода для ответвления к пускателю:
 А;
А;
Выбираю
провод марки АСК- (1Ч1,5), у которого  >
> А [6].
А [6].
3.3 Основные энергетические характеристики систем электропривода
Основные энергетические характеристики систем электропривода: коэффициент
полезного действия з и коэффициент мощности КМ.
1. Коэффициент полезного действия.
Наиболее наглядным и широко используемым выражением з является его
представление в виде произведения:
 ,
,
где
 соответственно КПД электрического,
электромеханического преобразователей и механической части привода, которые
можно определить как:
соответственно КПД электрического,
электромеханического преобразователей и механической части привода, которые
можно определить как:

 ,
,
где
 ,
, ,
, - соответственно мощность потерь в преобразователе,
двигателе и механической части.
- соответственно мощность потерь в преобразователе,
двигателе и механической части.
Найдем
коэффициент полезного действия по номинальным условиям работы электропривода:

.
Коэффициент мощности
Коэффициент
мощности можно рассчитать с различной степенью точности. Рассчитаем его по
следующей формуле:

 ,
, - действующий активный и реактивный входной ток,
- действующий активный и реактивный входной ток,
 -
действующий входной ток основной гармоники.
-
действующий входной ток основной гармоники.
Активный
и реактивный входные токи можно определить как:
 ,
,  ,
,
где
р - число фаз на выходе, S - число трехпульсных групп,  - действующий выходной ток.
- действующий выходной ток.
Определим
по универсальным кривым (11, стр.212,213) токи для f=50 Гц,  и фазовым углом выходного отстающего тока
и фазовым углом выходного отстающего тока  :
:
 ,
, ,
,
Коэффициент
искажения входного тока определяется по расчетной характеристике источника
11,стр. 224: 
Коэффициент
мощности равен:
 .
.
4.
Расчет параметров структурной схемы
4.1 Составление структурной схемы системы регулируемого электропривода
Для регулируемого электропривода вентилятора принимаем векторное
управление и поэтому в дальнейшем ведем расчет для структурной схемы ПЧ-АД
векторного управления.
Термин векторное управление означает, что переменные контролируются не
только по амплитуде, но и по фазе. Суть метода состоит в раздельном управлении
компонентами вектора тока статора isq и isd, являющимися проекциями результирующего вектора i1 на вращающиеся векторы q и d
координатной системы, связанной с вектором потокосцепления ротора Yr. Известно, что электромагнитный
момент асинхронного двигателя пропорционален потокосцеплению ротора Yr и составляющей тока статора по оси q. Если поддерживать неизменным потокосцепление
ротора путём регулирования составляющей тока статора по оси d, то момент двигателя будет прямо
пропорционален току isq,
так, как и в обычных коллекторных двигателях постоянного тока. Соответственно
изменение составляющей isd эквивалентно регулированию частоты вращения двигателя
постоянного тока при изменении магнитного потока. Обозначения, принятые на
схеме:
ЗИ - задатчик интенсивности;
Ф - фильтр;
РПС - регулятор потокосцепления;
РС - регулятор скорости;
 -
регулятор тока isx;
-
регулятор тока isx;
 -
регулятор тока isy;
-
регулятор тока isy;
БР
- блок развязки;
ПКП
- прямой координатный преобразователь;
ОКП
- обратный координатный преобразователь;
Идеал.
ПЧ - идеализированный преобразователь частоты.
Рисунок 13 - Сокращённая структурная схема системы векторного управления
асинхронным электроприводом с однозонным регулированием скорости
.1.1 Модель асинхронного двигателя
Модель с ориентацией системы координат по вектору потокосцеплений ротора.
Структурная схема модели асинхронного двигателя построена на системе уравнений
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
При
допущении lm=const структурная схема модели значительно упрощается и
приобретает вид, представленный на рисунке 14.
Расчёт параметров модели;
Рисунок
14 - Структурная схема модели асинхронного двигателя

 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Полезно
отметить, что постоянные времени Tэ и Tr имеют такой же физический смысл и примерно те же величины, что и
электромагнитные постоянные времени цепей якоря и возбуждения компенсированных
машин постоянного тока.
4.1.2
Прямой преобразователь координат
Преобразователь
координат служит для преобразования векторов Usa, Usb, Usc в вектора Usx и Usн.
Рисунок
15 - структурная схема прямого преобразователя координат
Прямой
преобразователь координат описывается уравнениями
 ;
;
 .
.
 -
напряжения, представленные в неподвижной “двухфазной” системе координат.
-
напряжения, представленные в неподвижной “двухфазной” системе координат.
 ;
;
 .
.
 -
напряжения, представленные во вращающейся системе координат,
-
напряжения, представленные во вращающейся системе координат,  - угол поворота координатной системы.
- угол поворота координатной системы.
4.1.3
Обратный преобразователь координат
Рисунок
16 - Структурная схема обратного координатного преобразователя
Обратный
преобразователь координат описывается уравнениями
 ;
;
 .
.
 -
напряжения, представленные в неподвижной “двухфазной” системе координат.
-
напряжения, представленные в неподвижной “двухфазной” системе координат.
 ;
;
 ;
;
 .
.
 - токи в
трёхфазной системе координат.
- токи в
трёхфазной системе координат.
4.1.4
Идеализированный преобразователь частоты

Рисунок
17 - Структурная схема идеализированного преобразователя частоты
kи - коэффициент передачи инвертора.
Для
системы относительных единиц kи=1.
Ти
- постоянная времени инвертора. Определяется несущей частотой коммутации
транзисторов (fн=5 кГц) с
учётом относительного времени (tб=1/314.15
с)
 .
.
4.1.5
Блок развязки
Рисунок
18 - Структурная схема блока развязки
Блок
развязки позволяет компенсировать влияние перекрёстных обратных связей в модели
асинхронного двигателя, В результате получаем автономное регулирование
составляющих тока статора isx и isy.
.2
Расчет коэффициентов усиления и постоянных времени системы
Система
относительных единиц
В
дальнейшем все параметры и переменные состояния электропривода представляются в
относительных единицах.
Обобщённая
формула перехода к относительным единицам имеет вид
 ,
,
где
Y - значение физической величины (параметра,
воздействия, переменной состояния и др.) в исходной системе единиц;
Yб - базисное значение, выраженное в той же исходной
системе и принятое в качестве единицы измерения величины Y в
системе относительных единиц;
y - значение
величины в системе относительных единиц.
Для
относительных значений угловой частоты напряжения и тока статора, действующего
значения фазного напряжения статора us=Us/Uб, тока
статора is=Is/Iб и
относительной величины электромагнитного момента ms=M/Mб
базисными примем из значения в
точке номинального режима двигателя:
 ;
;
 ;
;
 ;
;
 ,
,
где
Pэм -
электромагнитная мощность идеализированного АД

W0.н - частота вращения магнитного поля АД
 .
.
Момент
инерции в относительных единицах
 ,
,
где
Jб -
базовый момент инерции
 .
.
Переведём
значения параметров двигателя в систему относительных единиц.
Сопротивление
обмотки статора
Сопротивление
обмотки ротора

Индуктивное сопротивление намагничивания

Индуктивное сопротивление статора
Индуктивное сопротивление ротора

.2.1
Контур тока isx
Регулятор
тока isx имеет структуру ПИ-регулятора
Рисунок
19 - ПИ регулятор тока
Параметры
регулятора определяются исходя из свойств объекта регулирования контура тока isx с учётом настройки на модульный оптимум.
Структурная
схема контура тока isx представлена на рисунке 20.
Рисунок
20 - Структурная схема контура тока isx
Передаточная
функция регулятора тока isx
 .
.
Принимаем
 , тогда
, тогда
 .
.
Коэффициент
усиления и постоянная времени регулятора тока
 ;
;
 .
.
4.2.2
Контур тока isу
Регулятор
тока isу имеет
структуру ПИ-регулятора, идентичную регулятору isx.
Параметры определяются исходя из свойств объекта регулирования контура тока isy (пренебрегаем влиянием обратной связи по ЭДС) с
учётом настройки на модульный оптимум.
Рисунок
21 - Структурная схема контура тока isy0
Передаточная
функция регулятора тока isy
 .
.
Принимаем
 , тогда
, тогда
 .
.
Коэффициент
усиления и постоянная времени регулятора тока
 ;
;
 .
.
4.2.3
Контур потокосцепления
Регулятор
потокосцепления РПС ротора Yr имеет структуру ПИ-регулятора. Параметры регулятора
определяются исходя из объекта регулирования контура потокосцепления с учётом
настройки на модульный оптимум.
Рисунок
22 - Структурная схема контура потокосцепления
Коэффициент
усиления и постоянная времени регулятора потокосцепления
 ;
;
 .
.
4.2.4
Контур скорости
Регулятор
скорости РС имеет структуру типа ПИ. Параметры определяются свойствами объекта
регулирования контура скорости с учётом настройки на симметричный оптимум и
наличием входного фильтра.

Рисунок
23 - Структурная схема контура скорости
Коэффициент
усиления и постоянная времени регулятора скорости
 ;
;
Постоянная
времени фильтра:  .
.
.3 Расчет переходных процессов при различных заданиях
На рисунке 24 представлена модель электропривода вентилятора по системе
ПЧ-АД

Рисунок 24 Имитационная модель электропривода вентилятора по системе
ПЧ-АД в программной среде Matlab
7.0
На дальнейших рисунках изображены переходные процессы системы ПЧ-АД 50 Гц
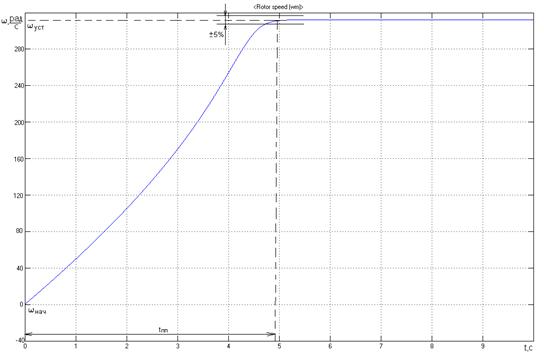
Рисунок 25 Скорость ротора при 50 Гц
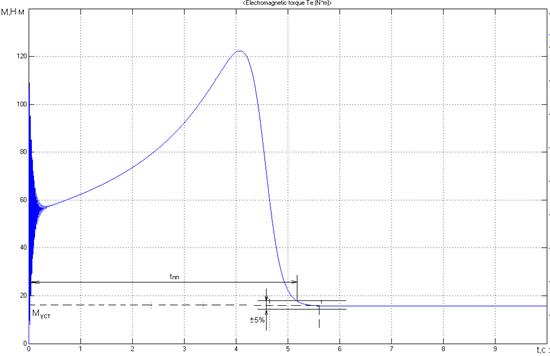
Рисунок 26 Электромагнитный момент при 50 Гц
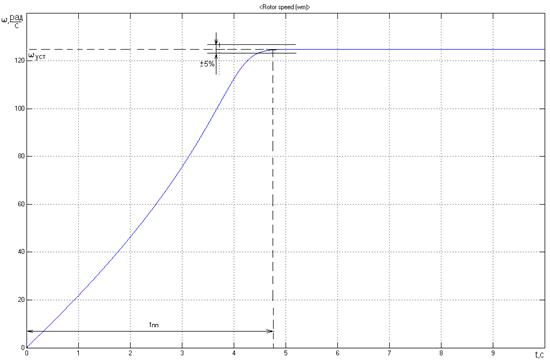
Рисунок 27 Скорость ротора при 40 Гц
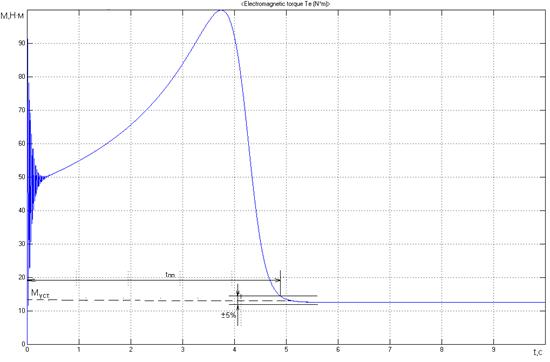
Рисунок 28 Электромагнитный момент при 40 Гц
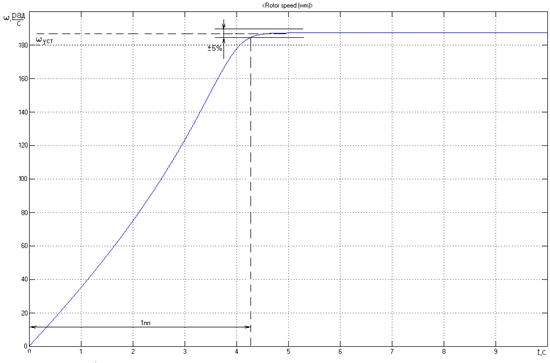
Рисунок 29 Скорость ротора при 30 Гц
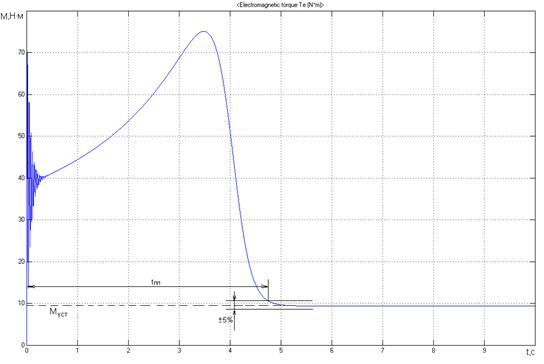
Рисунок 30 Электромагнитный момент при 30 Гц
5. Разработка функциональной схемы системы регулируемого электропривода
Все модули функциональной схемы реализуются программно
на контроллере привода. В соответствии с этим имеется набор типовых программных
модулей и программ связки модулей, обеспечивающих реализацию нужной системы
управления.
В ПЧ применена наиболее распространенная для управления короткозамкнутым
АД схема ПЧ с АИН и ШИМ напряжения на выходе, неуправляемым выпрямителем на
входе силовой части схемы и микропроцессорным управлением.
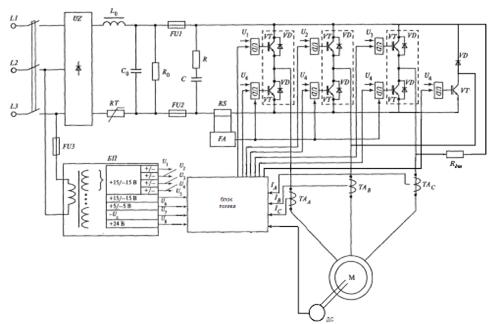
Рисунок 31 - Функциональная силовая схема преобразователя частоты
Функциональная
схема преобразователя частоты состоит из двух основных блоков: неуправляемого
выпрямителя и управляемого инвертора с блоками управления. Напряжение сети  стандартной частоты
стандартной частоты  подаётся
на вход неуправляемого выпрямителя, преобразующего переменное напряжение
подаётся
на вход неуправляемого выпрямителя, преобразующего переменное напряжение  в постоянное
в постоянное  .
.

Рисунок 32 - Функциональная схема управления преобразователя частоты.
Выпрямленное
напряжение подаётся на вход инвертора, который преобразует его в
трёхфазное регулируемое напряжение  регулируемой
частоты
регулируемой
частоты , поступающее на двигатель М. Величина и частота
выходного напряжения инвертора
, поступающее на двигатель М. Величина и частота
выходного напряжения инвертора  регулируется
блоком управления ключами.
регулируется
блоком управления ключами.
Инвертор
состоит из шести транзисторов, работающих в ключевом режиме с условием, если
верхний транзистор открыт, то нижний закрыт, и одного тормозного транзистора. Для
исключения токов ЭДС самоиндукции в моменты коммутации и устранения обратных
напряжений, параллельно IGBT транзисторам включаются быстродействующие диоды
FWD. На рисунке 27 показаны сигналы управления силовыми ключами.
В
блоке логики для поддержания постоянства потокосцепления статора в coответствии
с U/f-характеристикой применяются модули IR-компенсации
и Ud-коррекции.
В системе предусматриваются регулирование тока
ограничения в соответствии с заданным значением I*mах
воздействием на напряжение или частоту статора и выбор U/f-характеристики,
соответствующей управлению механизмами, имеющими постоянную или вентиляторную нагрузку.
Имеется защита от «опрокидывания» привода в случае превышения момента нагрузки
выше критического значения.
В качестве датчиков скорости используют аналоговые или
импульсные датчики. Во втором случае применяются датчики с двумя каналами
импульсов, имеющих фазовый сдвиг 90°.[12].
Рисунок 33 - Управление транзисторами при вращении вперед.
Для нормальной работы инвертора необходимо постоянно отслеживать ток
звена постоянного тока, с этой целью ставится датчик тока RS, сигнал от
которого поступает на защиту FA. И в случае аварии нижние транзисторы
откроются, и ток будет протекать по кратчайшему пути.
При возникновении режима генераторного торможения избыточная энергия идет
на заряд конденсатора С, напряжение на котором нарастает лавинообразно, и для
предотвращения аварии используется защита, контролирующая это напряжение.
Заключение
Одним из важнейших технических мероприятий, обеспечивающих охрану
здоровья трудящихся и высокую производительность труда на предприятиях,
является вентиляция. На строительство и эксплуатацию вентиляционных установок в
нашей стране отпускаются большие средства. Поэтому весьма важно, чтобы
вентиляционные установки на предприятиях работали с наибольшим эффектом при
минимальном расходе электроэнергии.
В данном курсовом проекте был рассчитан регулируемый электропривод
вентилятора главного проветривания по системе ПЧ-АД. Система ПЧ-АД позволяет
повысить производительность, а также надежность производства, так как в системе
используется самая простейшая электрическая машина - асинхронный двигатель с
короткозамкнутым ротором. В настоящее время система ПЧ-АД получает широкое
распространение, так как это экономически целесообразнее, чем применение тех же
двигателей постоянного тока или АД с фазным ротором. Высокая плавность
регулирования скорости также является одним из основных достоинств такой
системы.
Список литературы
1. Электронный каталог: база данных содержит сведения о
судовых вентиляторах. Торговый дом "ХАРВЕНТ"
2. Электронный каталог: база данных содержит сведения о
электродвигателях. ЗАО "Вэлта-центр"
. Электротехнический справочник: Использование
электрической энергии / Под общ. ред. профессоров МЭИ В.Г. Герасимова и др.
(гл. ред. А.И. Попов). - 8-е изд., испр. и доп. - М.: Издательство МЭИ, 2002. -
696 с.
. Электронный каталог: база данных содержит сведения о
полупроводниковых приборах. Компания «Semikron»
. Электронный каталог: база данных содержит сведения о
транзисторах, диодах, тиристорах, стабилитронах, оптронах, варистора. Кампания
"Элкосиб"
. Электронный каталог: база данных содержит сведения о
выборе кабеля по току нагрузки.
. Электротехнический справочник: Использование
электрической энергии / Под общ. ред. профессоров МЭИ: И.Н. Орлова (гл.ред) и
др. - 7-е изд., испр. и доп. - М.: Энергоатомиздат, 1988. - 616с.: ил.
. Медведев Г.Г., Дорохов А.Р. Введение в курс: Насосы,
вентиляторы, компрессоры - Конспект лекций. - Томск: Изд. ТПУ, 1998. - 64с.
. М.Г. Чиликин, М.М. Соколов, В.М. Терехов, А.В.
Шинянский Основы автоматизированного электропривода. Учеб. Пособие для вузов.
М., «Энергия», 1974. - 568 с.
. Онищенко Г.Б., Юньков М.Г. Электропривод
турбомеханизмов. М., «Энергия», 1972. - 240 с.
. Джюджи Л., Пелли Б. Силовые полупроводниковые
преобразователи частоты: Теория, характеристики, примечание. /Пер. с англ. -
М.: Энергия, 1983.