Расчет электрического привода
МИНОБРНАУКИ
РОССИИ
Кумертауский
филиал
Федерального государственного образовательного бюджетного
учреждения
Высшего
профессионального образования
«Оренбургский государственный университет»
(Кумертауский филиал ОГУ)
Кафедра
электроснабжения промышленных предприятий
КУРСОВОЙ
ПРОЕКТ
по дисциплине
«Электрический привод»
Расчёт
электрического привода
КФ ГОУ ОГУ
140211.65.9 0 15.27 ПЗ
Руководитель работы
Фёдоров С.В.
Исполнитель
студент гр. 10-ЭПП 1з
Ефтин К.Е.
Кумертау 2015
г.
Аннотация
В пояснительной записке к курсовой работе по
дисциплине «Электрический привод» представлен расчет и проверка электрического
асинхронного двигателя серии 4А.
Пояснительная записка содержит 40 страниц, 4 таблицы,
5 источников, 4 графика
Содержание
Введение
Исходные данные
. Построение нагрузочной диаграммы электродвигателя привода
. Определение необходимой мощности асинхронного двигателя привода
. Проверка правильности выбора мощности двигателя по нагреву методом
средних потерь
. Расчет и построение механической характеристики электродвигателя
. Расчет и построение механической характеристики рабочей машины
. Определение продолжительность пуска электродвигателя с нагрузкой
. Расчет потерь энергии в асинхронном двигателе при номинальном
напряжении питания и пуске системы
. Расчет предельно допустимой частоты включений электропривода
. Расчет и построение кривой изменения превышения температуры
электродвигателя
. Принципиальная электрическая схема автоматического управления
электродвигателем
Заключение
Список использованных источников
Приложение
Введение
Электроприводом называется электромеханическая
система, состоящая из электродвигательного, преобразовательного, передаточного
и управляющего устройств, предназначенных для приведения в движение
исполнительных органов рабочей машины и управления этим движением.
Нельзя представить себе ни одного современного
производственного механизма, в любой области техники, который не приводился бы
в действие электроприводом. В электроприводе основным элементом, непосредственно
преобразующим электрическую энергию в механическую, является электродвигатель,
который чаще всего управляется при помощи соответствующих преобразовательных и
управляющих устройств с целью формирования статических и динамических
характеристик электропривода, отвечающих требованиям производственного
механизма.
Целью данной курсовой работы является расчет системы
автоматизированного электропривода рабочей машины.
Асинхронные двигатели являются основными
преобразователями электрической энергии в механическую и составляют основу
электропривода большинства механизмов. Они широко используются в промышленности
благодаря простоте их конструкции, надежности в эксплуатации и сравнительно
низкой себестоимости. Наиболее простыми в отношении устройства и управления, надежными
в эксплуатации, имеющими наименьшую массу, габариты и стоимость при
определенной мощности, являются асинхронные двигатели с короткозамкнутым
ротором.
При выборе двигателя по мощности следует исходить из
необходимости его полного использования в процессе работы. В случае завышения
номинальной мощности двигателя снижаются технико-экономические показатели
электропривода, то есть коэффициент полезного действия и коэффициент мощности.
Если же нагрузка на валу двигателя превышает номинальную, то это приводит к
росту токов в его обмотках, а значит и потерь мощности выше соответствующих
номинальных значений. Для обоснованного выбора асинхронного двигателя
необходимо знать, как изменяется нагрузка на валу двигателя во времени, что в
свою очередь позволяет судить о характере изменения потерь мощности. С целью
определения нагрузки двигателя большинства производственных механизмов строятся
так называемые нагрузочные диаграммы, под которыми понимаются зависимости
развиваемых двигателем момента и мощности от времени
Исходные данные

1. Построение нагрузочной диаграммы
электродвигателя привода
По исходным данным построим нагрузочную диаграмму
(Приложение рис. 1.1).
Рассчитаем эквивалентную по нагреву постоянную
мощность нагрузки на валу электродвигателя по выражению
 , (1.1)
, (1.1)
где
Рi - мощность на валу электродвигателя в i-й период работы, кВт;i
- продолжительность i-гo периода работы, мин;- количество периодов нагрузки.

Рассчитаем
среднюю мощность нагрузки на валу электродвигателя по выражению
 (1.2)
(1.2)
Степень
неравномерности нагрузки оценивается на основании расчета значения коэффициента
формы нагрузочной диаграммы
 (1.3)
(1.3)

По
значению коэффициента формы нагрузочной диаграммы определим вид нагрузки:
постоянная - 1,0.
2. Определение необходимой мощности
асинхронного двигателя привода
Мощность электродвигателя из условия обеспечения его
допустимого нагрева при работе определяется по соотношению
 , (2.1)
, (2.1)
где
Рн - номинальная мощность электродвигателя, кВт;м -
коэффициент механической перегрузки.
Коэффициент
механической перегрузки  , определяется через коэффициент тепловой перегрузки
двигателя pτ:
, определяется через коэффициент тепловой перегрузки
двигателя pτ:
 , (2.2)
, (2.2)
 , (2.3)
, (2.3)
где α - отношение постоянных потерь
мощности электродвигателя к переменным, для асинхронных двигателей общего
назначения α=0,5-0,7;
 -
продолжительность работы электродвигателя с нагрузкой, мин;0 -
продолжительность отключения электродвигателя до следующего включения, мин,
принять 10;
-
продолжительность работы электродвигателя с нагрузкой, мин;0 -
продолжительность отключения электродвигателя до следующего включения, мин,
принять 10;
β0 -
коэффициент, учитывающий ухудшение теплоотдачи двигателя в отключенном
состоянии и равный отношению теплоотдачи отключенного двигателя к теплоотдаче
при его работе: для закрытых, без наружного охлаждения или с принудительной
независимой вентиляцией - 0,9-1,0; для закрытых с наружным охлаждением от
собственного вентилятора на валу двигателя - 0,45-0,55; для защищенных, с
вентиляцией от собственного вентилятора на валу - 0,25-0,35; принять β0= 0,5.н
- постоянная времени нагрева электродвигателя, мин. Принять для первоначального
выбора мощности электродвигателя из условия допустимого нагрева по соотношению
(2.1) Tн = 20 мин.


 , (2.4)
, (2.4)
где МП(U) - пусковой момент электродвигателя с
учетом возможного снижения напряжения питания при пуске, Н·м;стр -
момент статического сопротивления на валу двигателя при трогании, Н·м,
принимается равным Mмо=0,2Ммн ;
Мизб - минимальный избыточный момент,
необходимый для обеспечения пуска двигателя, Н·м, обычно Mизб=0,2Ммн.
Применительно к асинхронному двигателю привода
соотношение (2.4) можно записать в виде:
 ,(2.5)
,(2.5)
где
 - кратность пускового момента асинхронного двигателя
по отношению к его номинальному моменту, находится по справочным данным
(таблицы Б.1-Б.2);
- кратность пускового момента асинхронного двигателя
по отношению к его номинальному моменту, находится по справочным данным
(таблицы Б.1-Б.2);
 -
относительный уровень питающего напряжения при пуске асинхронного двигателя в
долях от номинального
-
относительный уровень питающего напряжения при пуске асинхронного двигателя в
долях от номинального  .
.
Если
обе части выражения (2.5) умножить на номинальную угловую скорость вращения асинхронного
двигателя  и учесть, что
и учесть, что  , то
окончательно получим формулу для определения необходимой мощности асинхронного
двигателя из условия обеспечения его пуска:
, то
окончательно получим формулу для определения необходимой мощности асинхронного
двигателя из условия обеспечения его пуска:
 .(2.6)
.(2.6)

Для
обеспечения статической устойчивости электропривода мощность двигателя должна
быть достаточной, чтобы выполнялось условие статической устойчивости:
 (2.7)
(2.7)
где
МK(U) - максимальный (критический) момент двигателя, с учетом
возможного снижения напряжения питания при работе двигателя, Н·м;
 -
максимальный момент статической нагрузки на валу двигателя при его работе с
максимальной нагрузкой согласно нагрузочной диаграмме, Н·м.
-
максимальный момент статической нагрузки на валу двигателя при его работе с
максимальной нагрузкой согласно нагрузочной диаграмме, Н·м.
Применительно
к асинхронному электроприводу выражение (2.7) можно представить в виде:
 ,(2.8)
,(2.8)
Умножив
обе части соотношения (2.8) на номинальную угловую скорость вращения
асинхронного двигателя и учитывая, что  , получим
формулу для расчета мощности асинхронного двигателя из условия обеспечения
статической устойчивости электропривода:
, получим
формулу для расчета мощности асинхронного двигателя из условия обеспечения
статической устойчивости электропривода:
 . (2.9)
. (2.9)
3. Проверка правильности выбора
мощности двигателя по нагреву методом средних потерь
Выберем двигатель типа 4А80В2.

Номинальная мощность выбираемого асинхронного
двигателя с короткозамкнутым ротором должна быть достаточной, чтобы
обеспечивалось выполнение условий (2.1), (2.6) и (2.9).
Правильность выбора мощности электродвигателя, исходя
из обеспечения его допустимого нагрева, уточняется методом средних потерь. Для
правильно выбранного электродвигателя должно обеспечиваться условие:
 ,(3.1)
,(3.1)
где
 - номинальные потери мощности в электродвигателе, Вт;
- номинальные потери мощности в электродвигателе, Вт;
 -
средние потери мощности в электродвигателе, Вт;
-
средние потери мощности в электродвигателе, Вт;
 -
уточненное значение коэффициента тепловой перегрузки.
-
уточненное значение коэффициента тепловой перегрузки.
Уточненный
коэффициент тепловой перегрузки электродвигателя рассчитывается по (2.3) с
использованием уточненного значения постоянной времени нагрева  после предварительного определения мощности двигателя
по (2.1), (2.6) и (2.9).
после предварительного определения мощности двигателя
по (2.1), (2.6) и (2.9).
Необходимое
значение в минутах определим по формуле:
 ,(3.2)
,(3.2)
где
m - масса выбранного электродвигателя, кг;
 -
номинальный КПД двигателя;
-
номинальный КПД двигателя;
 - номинальная
(паспортная) мощность двигателя, Вт;
- номинальная
(паспортная) мощность двигателя, Вт;
 -
номинальное превышение температуры обмотки статора электродвигателя при
измерении методом сопротивления, 0С.
-
номинальное превышение температуры обмотки статора электродвигателя при
измерении методом сопротивления, 0С.
Обмотки
асинхронных электродвигателей серии 4А с высотами оси вращения 50-132 мм имеют
изоляцию класса нагревостойкости B, с высотами 160-355 мм - класса F. Обмотки
асинхронных электродвигателей серии АИР имеют изоляцию класса нагревостойкости
F. Классы нагревостойкости изоляции характеризуются следующими температурами
допустимого нагрева: класс Y - 90°С, А - 105°С, E - 120°С, B - 130°С, F -
155°С, H - 180°С и C - свыше 180°С. Значения допустимых превышений температуры частей электрических машин при температуре
газообразной охлаждающей среды 40°С для изоляции класса нагревостойкости А
составляет 60°С, класса Е - 75°С, В - 80°С, F - 100°С и Н - 125°С.

Номинальные
потери мощности в Вт могут быть рассчитаны по известной номинальной
мощности выбранного электродвигателя  ,
выраженный в Вт, и по известной величине номинального КПД:
,
выраженный в Вт, и по известной величине номинального КПД:
 . (3.3)
. (3.3)

Средние
потери мощности в электродвигателе определяются по выражению:
 (3.4)
(3.4)
где
потери мощности в электродвигателе для i-го
периода работы, Вт.
В
свою очередь  определяют по выражению:
определяют по выражению:
 (3.5)
(3.5)
где
 - нагрузка на валу электродвигателя для i-го периода
работы, Вт;
- нагрузка на валу электродвигателя для i-го периода
работы, Вт;
 - КПД электродвигателя
при нагрузке.
- КПД электродвигателя
при нагрузке.
КПД
электродвигателя для любой i P нагрузки находится по данным или рассчитывается
по выражению:
 (3.6)
(3.6)
где α - отношение постоянных потерь
мощности электродвигателя к переменным. При отсутствии этих данных принять a =
0,6;
 -
степень загрузки двигателя.
-
степень загрузки двигателя.







При
холостом ходе электродвигателя (P2=0,  =0)
потери мощности в нем определяются постоянными потерями и равны:
=0)
потери мощности в нем определяются постоянными потерями и равны:
 (3.7)
(3.7)
Результаты
расчета потерь мощности ∆Pi на участках нагрузочной
диаграммы занести в таблицу 3.1.
Таблица
3.1 - Данные к построению кривой изменения превышения температуры
электродвигателя
|
Периоды
|
1 (υy1=89.504)
|
2 (υy2=71.32)
|
3 (υy3=89.504)
|
∆P1=504
|
∆P2=401
|
∆P3=504
|
|
t, мин
|
t01=0
|
tc1=0
|
tk1=5
|
t02=0
|
tc2=5
|
tk2=7
|
t03=0
|
tc3=7
|
tk3=12
|
|
υ°С
|
0
|
3.97
|
2.76
|
2.104
|
2.76
|
20.96
|
14.57
|
20.96
|
23.028
|
|
4 (υy4=71.32)
|
Отключение электродвигателя
(υy0=0)
|
|
∆P4=401
|
∆P=0
|
|
t02=0
|
tc2=12
|
tk2=14
|
t=0
|
t=t0/2=19
|
t=t0=24
|
|
12.75
|
23.028
|
40.32
|
υ0= υk4=40.32
|
6.19
|
0.54
|
4. Расчет и построение механической
характеристики электродвигателя
Механическую характеристику асинхронного
электродвигателя ω=ƒ1(Мдв) строим на основании расчета его
вращающих моментов для частот, вращения, соответствующих скольжениям: 0; s=sн;
0,1; s=sк; 0,3; 0,4; 0,8 и 1,0.
Вращающий пусковой момент электродвигателя при s=1,0 (ω=0) и минимальный момент при s=0,8
определим, используя кратности пускового μм и минимального м m моментов, по выражениям:
Мм=Мн∙μм и Мм,n=Мн∙μп (4.1)
где
 - номинальный вращающий момент электродвигателя, Н∙м;
- номинальный вращающий момент электродвигателя, Н∙м;
-
номинальная мощность электродвигателя, Вт;
 -
номинальная угловая скорость электродвигателя, рад/с, (
-
номинальная угловая скорость электродвигателя, рад/с, ( - номинальная угловая скорость, об/мин).
- номинальная угловая скорость, об/мин).




Остальные
вращающие моменты электродвигателя для скольжений от 0 до 0,4 рассчитываются на
основании уточненной формулы Клосса, приняв в ней с достаточной степенью
точности отношение активного сопротивления обмотки фазы статора к приведенному
активному сопротивлению обмотки фазы ротора равным единице:
 (4.2)
(4.2)
где
 - максимальный вращающий момент электродвигателя, Н·м:
- максимальный вращающий момент электродвигателя, Н·м:

 (4.3)
(4.3)
где
sк -
критическое скольжение электродвигателя, соответствующее максимальному
вращающему моменту;
 -
номинальное скольжение электродвигателя, соответствующее номинальному
вращающему моменту;
-
номинальное скольжение электродвигателя, соответствующее номинальному
вращающему моменту;
 -
синхронная угловая скорость электродвигателя (магнитного поля статора), об/мин;
-
синхронная угловая скорость электродвигателя (магнитного поля статора), об/мин;
 - число
пар полюсов электродвигателя (ближайшее меньшее целое число);
- число
пар полюсов электродвигателя (ближайшее меньшее целое число);
 Гц -
частота тока в электрической сети.
Гц -
частота тока в электрической сети.


Такой
метод расчета механической характеристики с графической интерполяцией в ее
пусковой части позволяет достаточно точно определить значение критического
скольжения асинхронного двигателя, воспроизвести номинальный, максимальный и
пусковой вращающие моменты, а также отобразить незначительный провал в
механической характеристике при скольжении около 0,8, связанный с наличием
составляющих вращающего момента от высших гармонических (в основном от 5-й и
7-й гармоник), определяющий минимальный момент.
Данные
расчета механической характеристики ω=ƒ1(Мдв)
сведем в таблицу 4.1. Переход от скольжения s к частоте вращения ω произведем по формуле:
 (4.4)
(4.4)
где
 - синхронная частота вращения вала электродвигателя
(магнитного поля), рад/с.
- синхронная частота вращения вала электродвигателя
(магнитного поля), рад/с.





Таблица
4.1 - Данные к построению механической характеристики асинхронного двигателя
|
s
|
0
|
sн=0.1
|
0,1
|
sк=0.57
|
0,3
|
0,4
|
0,8
|
1,0
|
|
ω, рад/с
|
ω0=104.66
|
ωн=94.5
|
94.5
|
ωк=44.37
|
73.26
|
62.8
|
20.93
|
0
|
|
М(Uн)Н∙м
|
0
|
Мн=23.28
|
23.28
|
Мк=51.21
|
44.93
|
49.12
|
Мм=27.93
|
Мn=46.56
|
|
М(U),Н∙м
|
0
|
11.40
|
11.40
|
25.09
|
22.01
|
24.06
|
13.68
|
22.81
|
Построим механическую характеристику электродвигателя.
(приложение. рис.1.2)
При
построении механических характеристик  значения ω располагаем по оси ординат (функция), а значения М -
по оси абсцисс (аргумент).
значения ω располагаем по оси ординат (функция), а значения М -
по оси абсцисс (аргумент).
Интерполируя
механическую характеристику двигателя в ее пусковой части, следует учесть, что при
скольжениях  формула Клосса занижает действительные вращающие
моменты. В частности, для s=0,4 вращающий момент, вычисленный по (4.2), будет
несколько занижен.
формула Клосса занижает действительные вращающие
моменты. В частности, для s=0,4 вращающий момент, вычисленный по (4.2), будет
несколько занижен.
. Расчет и построение механической
характеристики рабочей машины
Передаточное отношение механической передачи от
электродвигателя к рабочей машине:
 . (5.1)
. (5.1)
С
учетом изменения момента рабочей машины от угловой скорости ее вала и учитывая,
что  окончательно имеем следующее выражение, связывающее
приведенный момент статического сопротивления на валу электродвигателя Мс
со скоростью вращения его вала:
окончательно имеем следующее выражение, связывающее
приведенный момент статического сопротивления на валу электродвигателя Мс
со скоростью вращения его вала:
 . (5.2)
. (5.2)
Давая
w значения от 0 до  , рассчитаем зависимость
, рассчитаем зависимость  .
.







Результаты
свести в таблицу 5.1.
Таблица
5.1 - Данные к построению механической характеристики рабочей машины
относительно вала электродвигателя
|
ω, рад/с
|
0
|
20.93
|
62.8
|
73.26
|
44.37
|
94.5
|
104.66
|
|
Мс, Н∙м
|
9.31
|
17.56
|
38.19
|
26.80
|
46.56
|
50.56
|
На
основании расчетных данных строим кривую  на том
же графике, что и механическая характеристика электродвигателя
на том
же графике, что и механическая характеристика электродвигателя  (приложение рис.1.3)
(приложение рис.1.3)
. Определение продолжительность пуска
электродвигателя с нагрузкой
Расчет продолжительности пуска и торможения
электропривода заключается в следующем.
Предварительно необходимо момент инерции рабочей
машины и электродвигателя, выраженный в кг·м2, перевести в систему
единиц измерения СИ по соотношению:
 , (6.1)
, (6.1)
где
J - момент инерции массы, кг·м2.

Тогда
приведенный момент инерции системы электродвигатель - рабочая машина
относительно вала электродвигателя можно выразить в виде:
 , (6.3)
, (6.3)
где
k - коэффициент, учитывающий момент инерции механической передачи от
электродвигателя к рабочей машине. Принять k=1,2.

Затем,
используя (построенные механические характеристики электродвигателя  и рабочей машины
и рабочей машины  , находим
их разность - кривая избыточного (динамического) момента:
, находим
их разность - кривая избыточного (динамического) момента:  .
.
Для
1 участка:



Так
же для остальных участков.
Продолжительность
разгона электропривода на каждом участке скоростей вращения рассчитывают по
выражению:
 , (6.4)
, (6.4)
где
 - интервал скорости вращения на i-м участке, 1/с;
- интервал скорости вращения на i-м участке, 1/с;




 -
средний избыточный момент на i-м участке, принимаемый постоянным, Н·м.
-
средний избыточный момент на i-м участке, принимаемый постоянным, Н·м.
Полная
продолжительность пуска равна сумме частичных продолжительностей
 .(6.5)
.(6.5)

Результаты
расчета сведем в таблицу 4.3.
Таблица
4.3 - Данные расчета продолжительности пуска электропривода
|
Номера участков по
направлению разгона
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
|
ωнач,
рад/с
|
0
|
20.93
|
62.8
|
73.26
|
44.37
|
94.5
|
94.5
|
104.66
|
|
ωкон,
рад/с
|
20.93
|
62.8
|
73.26
|
44.37
|
94.5
|
94.5
|
104.66
|
0
|
|
∆ω=ωнач-ωкон,
рад/с
|
20.93
|
41.86
|
10.46
|
28.89
|
0.3
|
10.16
|
0
|
|
Мизб(Uн), Н∙м
|
0.324
|
3.66
|
10.40
|
15.57
|
0.87
|
2.78
|
1.78
|
0
|
|
Мизб(U),
Н∙м
|
-18.67
|
-4.4
|
-1.99
|
-8.94
|
-17.99
|
-14.52
|
-7.73
|
0
|
|
∆t(Uн)
|
8.08
|
0.34
|
0.05
|
0.23
|
5.6
|
0.01
|
0.7
|
0
|
Вращающий момент асинхронного двигателя для любой
фиксированной скорости вращения прямо пропорционален квадрату приложенного
напряжения, поэтому для всех скоростей вращения справедливо соотношение:
 , (6.6)
, (6.6)
где
 - вращающий момент асинхронного электродвигателя три
номинальном напряжении, Н-м;
- вращающий момент асинхронного электродвигателя три
номинальном напряжении, Н-м;
 - вращающий момент асинхронного электродвигателя при
той же скорости вращения, но при напряжении по величине отличном от
номинального, Н-м;
- вращающий момент асинхронного электродвигателя при
той же скорости вращения, но при напряжении по величине отличном от
номинального, Н-м;
 -
относительное значение питающего напряжения в долях от номинального, равное
-
относительное значение питающего напряжения в долях от номинального, равное  .
.
Поэтому
для расчета продолжительности пуска электропривода с нагрузкой в случае
снижения питающего напряжения на зажимах двигателя на ∆U% от номинального
значения необходимо пересчитать вращающие моменты асинхронного двигателя три
номинальном напряжении для фиксированных скоростей вращения (скольжений)
таблицы 4.1 по соотношению (6.6). Внести соответствующие значения пересчитанных
вращающих моментов в нижнюю строку этой таблицы и повторить необходимые
построения для расчета продолжительности пуска электропривода при пониженном
напряжении. Данные расчета внести в соответствующие строки таблицы 4.3.






Для
1 участка:



Так
как на первом участке механических характеристик разгона электропривода  , то при пуске с нагрузкой и понижении питающего
напряжения на ∆U% электропривод не запустится.
, то при пуске с нагрузкой и понижении питающего
напряжения на ∆U% электропривод не запустится.
7. Расчет потерь энергии в
асинхронном двигателе при номинальном напряжении питания и пуске системы
Потери энергии при пуске асинхронного двигателя
практически полностью определяются электрическими потерями энергии в его
обмотках, которые прямо пропорциональны квадрату силы тока. При прямом пуске
асинхронного двигателя с короткозамкнутым ротором можно принять, что в период
пуска токи статора и ротора равны. Тогда для расчета потерь энергии в джоулях
(Дж) за время пуска электродвигателя справедливо выражение:
 ,(7.1)
,(7.1)
где
∆Pэл.п -
номинальные электрические (переменные) потери мощности двигателя, Вт;
iп - кратность тока двигателя по отношению к
номинальному в любой рассматриваемый период времени пуска;п -
продолжительность пуска двигателя, с.
Для
асинхронных двигателей с короткозамкнутым ротором общего назначения можно
считать, что за период пуска средняя (эквивалентная) величина тока двигателя
составляет 0,9 его пускового тока при ω = 0, т. е.
 .(7.2)
.(7.2)
С
учетом этого имеем:
 .(7.3)
.(7.3)
Номинальные
электрические потери мощности двигателя можно определить по выражению:
 ,(7.4)
,(7.4)
где
α- коэффициент, равный отношению постоянных потерь
мощности двигателя к переменным. Принять α =0,6.
Таким
образом, обобщенная расчетная формула для определения потерь энергии в джоулях
при пуске асинхронного двигателя будет:
 .(7.5)
.(7.5)

Потери
энергии в асинхронном двигателе, Дж, при пуске системы без нагрузки можно
рассчитать не прибегая к предварительному определению продолжительности пуска с
учетом, что  :
:
 .(7.6)
.(7.6)

8. Расчет предельно допустимой
частоты включений электропривода
При нагрузке асинхронного двигателя в периоды работы
близкой к номинальной, предельно допустимая частота его включения в течение
одного часа, исходя из условия допустимого нагрева электродвигателя,
рассчитывается по формуле [1,2,3].
 (8.1)
(8.1)
 . (8.2)
. (8.2)
9.
Расчет и построение кривой изменения превышения температуры электродвигателя
Расчет превышения температуры электродвигателя на
каждом участке нагрузочной диаграммы производится на основании уравнения:
 ,(9.1)
,(9.1)
где
 - начальное превышение температуры двигателя на i-м
участке, °С.
- начальное превышение температуры двигателя на i-м
участке, °С.
 -
установившееся превышение температуры двигателя, которое бы наступило при
неограниченно длительной его работе с нагрузкой i-го участка, °С.
-
установившееся превышение температуры двигателя, которое бы наступило при
неограниченно длительной его работе с нагрузкой i-го участка, °С.
Установившееся
превышение температуры электродвигателя на каждом участке рассчитывают по
формуле:
 ,(9.2)
,(9.2)
где
А - теплоотдача электродвигателя, Вт/°С.
Значение
A определяют на основании каталожных данных выбранного электродвигателя по
выражению:
 . (9.3)
. (9.3)


Чтобы
определить, как изменяется превышение температуры электродвигателя на каждом из
участков нагрузочной диаграммы, необходимо сравнить начальное превышение
температуры на данном участке с его
установившимся превышением температуры ,
вычисленным по (9.2).
Если
< , то
будет происходить процесс нагрева электродвигателя. Если >
, то
будет происходить процесс нагрева электродвигателя. Если > , то
будет происходить процесс охлаждения электродвигателя.
, то
будет происходить процесс охлаждения электродвигателя.
Если
= то температура двигателя на данном участке
нагрузочной диаграммы изменяться не будет.
При
отключении двигателя от сети потери мощности в нем прекратятся.
Тогда
согласно (9.2)  и уравнение (9.1) примет вид:
и уравнение (9.1) примет вид:
 , (9.4)
, (9.4)
где
 - постоянная времени охлаждения отключенного
двигателя, мин.
- постоянная времени охлаждения отключенного
двигателя, мин.
Давая
t значения в начале (t=0), в середине и в конце участка охлаждения
длительностью t0 по (9.4), рассчитывают кривую охлаждения двигателя
после отключения.

Результаты
расчета сведем в таблицу 3.1 и построим кривую изменения превышения температуры
электродвигателя, совместив ее с нагрузочной диаграммой.
10. Принципиальная электрическая
схема автоматического управления электродвигателем
Необходимо предусмотреть защиту цепей электропривода
от токов короткого замыкания и перегрузки и выбрать соответствующую аппаратуру.
При выборе аппаратуры управления и защиты необходимо
руководствоваться следующим:
степень защиты аппаратуры должна соответствовать
требуемому конструктивному исполнению и принятому способу монтажа;
-
номинальное напряжение аппарата  должно
быть не менее номинального напряжения сети:
должно
быть не менее номинального напряжения сети:  ;
;
номинальный
ток аппарата  должен быть не менее максимального тока электрической
цепи:
должен быть не менее максимального тока электрической
цепи:  .
.
отключающая
способность аппарата должна превышать максимально возможное значение
контролируемой величины. Например, для автоматического выключателя или
контактора максимально-токовой защиты значение тока отключения аппарата  должно превышать максимальное значение тока короткого
замыкания данной цепи:
должно превышать максимальное значение тока короткого
замыкания данной цепи:  .
.
при
защите электродвигателей от перегрузки тепловые расцепители автоматических
выключателей и тепловых реле, а собственно и они сами, выбираются по
номинальному току  защищаемого двигателя:
защищаемого двигателя:  ;
;
для
обеспечения надежной работы плавких предохранителей номинальный ток плавкой
вставки  предохранителя должен быть не менее
предохранителя должен быть не менее  , где
, где  - ток
пусковой (включения) защищаемой цепи; α=1-2,5 - коэффициент, учитывающий кратность пускового тока по отношению
к номинальному и скорость снижения пускового тока. Например, при защите цепей
управления α=1,2-1,6. При защите силовых цепей электродвигателей
плавкими предохранителями значение коэффициента α=1,6 при тяжелом (затяжном) пуске и α=2,5 при легком пуске электродвигателя.
- ток
пусковой (включения) защищаемой цепи; α=1-2,5 - коэффициент, учитывающий кратность пускового тока по отношению
к номинальному и скорость снижения пускового тока. Например, при защите цепей
управления α=1,2-1,6. При защите силовых цепей электродвигателей
плавкими предохранителями значение коэффициента α=1,6 при тяжелом (затяжном) пуске и α=2,5 при легком пуске электродвигателя.

Заключение
По заданной нагрузочной диаграмме электропривода была
определена эквивалентная мощность и произведен выбор асинхронного двигателя с
фазным ротором, при этом было учтено условие Pн ≥ Pэ. Проверили выбранный двигатель на
нагрев по методу средних потерь. Условие ∆Pср ≤ ∆Pн выполняется. А так же проверили на
перегрузочную способность при снижении напряжения в сети.
Произвели расчет теплового режима выбранного двигателя
по заданной нагрузочной диаграмме, до установившегося теплового состояния.
Начертили и изучили схему управления пуском
асинхронных двигателей.
электропривод асинхронный двигатель мощность
Список использованных источников
Борыбина. Ю.Г. Справочник по проектированию электрических сетей и
электрооборудования.- М.: Энергоатомиздат,1991.Вольдек А. И. Электрические
машины/ А. И. Вольдек. Л.: Энергия, 1978.
Коломиец А.П., Кондратьева Н.П., Владыкин И.Р., Юран С.И. Копылов И.П.,
Клокова Б.К. Справочник по электрическим машинам/ М.: Энергоатомиздат, 1998.
Москаленко В. В. Электрический привод/ В. В. Москаленко. М.: Высшая
школа, 1991.
Фролов Ю.В., Шелякин В.П. Основы электрического привода. Краткий Курс. -
М.: КолосС, 2007.
Чиликин М. Г. Общий курс электропривода. 6-е изд./ М.: Энергоатомиздат,
1984.
Приложение
Рисунок 1.1. Нагрузочная диаграмма электропривода
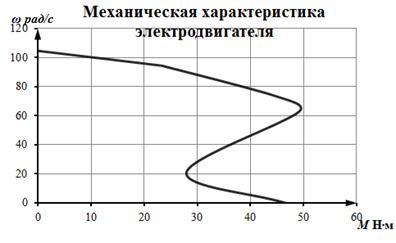
Рисунок 1.2 Механическая характеристика
электродвигателя

Рисунок 1.3 Механическая характеристика рабочей машины

Рисунок 1.4. Кривая изменения превышения температуры
электродвигателя