|
№
|
Наименование
параметра
|
Величина
|
Ед.
изм.
|
|
1.
|
Заказной
номер
|
6SE6440-2UD38-8FA1
|
|
|
2.
|
Напряжение
питающей сети
|
380-480
|
В
|
|
3.
|
Частота
сети
|
47-63
|
Гц
|
|
4.
|
Входной
ток
|
168.5
|
А
|
|
5.
|
Коэффициент
мощности
|
0,95
|
|
|
6.
|
Коэффициент
полезного действия
|
97
|
%
|
|
7.
|
Номинальная
выходная мощность ПВ100%
|
90
|
кВт
|
|
8.
|
Мощность
номинальная ПВ40%, Рн кВт
|
120
|
кВт
|
|
9.
|
Номинальный
выходной ток ПВ100%
|
175
|
А
|
|
10.
|
Номинальный
выходной ток ПВ40% IН,А
|
205
|
А
|
|
11.
|
Выходное
напряжение
|
0-380
|
В
|
|
12.
|
Выходная
частота
|
0-650
|
Гц
|
|
13.
|
Частота
ШИМ
|
2-16
|
кГц
|
|
14.
|
Перегрузочная
способность
|
1,36хIном
в теч. 57с.
|
238
|
|
|
1,6хIном
в теч. Зс.
|
280
|
|
15.
|
Число
фиксированных частот
|
15
|
|
|
16.
|
Дискретность
задания частоты
|
0,01
|
Гц
|
|
17.
|
Количество
дискретных входов
|
6
|
24В
|
|
18.
|
Количество
релейных выходов
|
|
DC
30В/5А AC 220В/2А
|
|
19.
|
Количество
аналоговых входов
|
2
|
0-20тА
0- 10В
|
|
20.
|
Количество
аналоговых выходов
|
2
|
0
- 20 тА
|
|
21.
|
Габаритные
размеры
|
326x356x1400
|
мм
|
|
22.
|
Масса
|
116
|
кг
|
|
23.
|
Рабочая
температура
|
0
до +40
|
°С
|
|
24.
|
Относительная
влажность
|
95
|
%
|
|
25
|
Степень
защиты
|
IP20
|
|
|
26
|
Типоразмер
|
FX
|
|
2.7.2
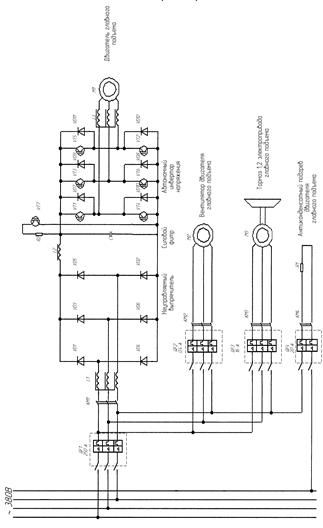
Характеристики преобразователей частоты
Силовой блок преобразователей
частоты может быть разделен на три части:
а) неуправляемый выпрямитель,
дополненный входной цепью защиты от перенапряжения и, возможно, цепью, ограничивающей
резкие броски напряжения,
б) цепь со звеном постоянного тока,
содержащая конденсатор
(обычно с очень большой емкостью,
поэтому используется батарея электролитических конденсаторов).
в) трехфазный транзисторный
инвертор.
3.
Разработка
системы автоматического управления электроприводом
.1 Построение системы
автоматического управления с ориентацией поля ротора в системе координат с
управляемым скольжением
Существует два принципа построения
системы автоматического регулирования асинхронного двигателя с векторным
управлением:
· Принцип ориентации
поля в системе координат с управляемой скоростью вращения. Здесь ориентирующим
элементом является регулятор момента, тогда вращающееся магнитное поле
образуется путем фиксации вектора потокосцепления ротора в системе координат и
приданием этой системе необходимой скорости вращения. Регулятор момента
строится в виде обращенной модели звена электромагнитного момента.
· Принцип ориентации
системы координат по полю. В этом варианте ориентирующим является сам объект
регулирования, и при этом из асинхронного двигателя получают информацию о
состоянии вектора потокосцепления взаимоиндукции и затем получают вектор
потокосцепления ротора. Необходимость в датчиках потокосцепления в пазу
асинхронного двигателя является существенным недостатком данного варианта.
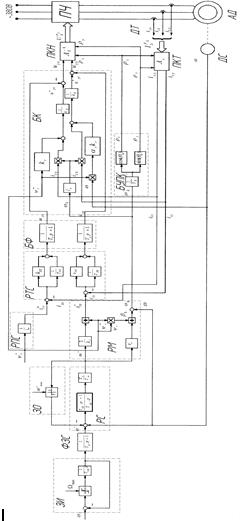
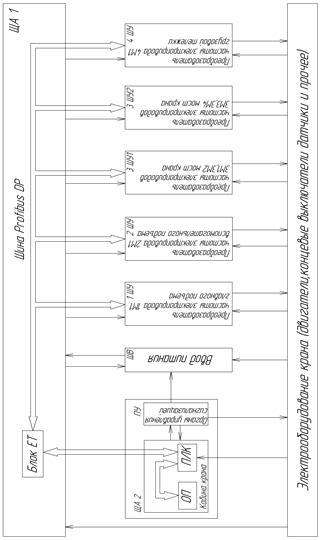
Функциональная схема системы
управления реализующая принцип управления приведена на рис.3.1.
Описание схемы (рис. 3.1.):
Силовая часть:
ПЧ - преобразователь частоты;
АД - асинхронный двигатель;
Информационная часть:
ДТ - датчик фазных токов;
ДС - датчик скорости (реально не существует);
БК - блок компенсации внутренних перекрестных
связей объекта;
ПКН - преобразователь координат напряжения
(осуществляет прямое преобразование с помощью матрицы As;
при
моделировании преобразование координат не используется);
ПКТ - преобразователь координат тока
(осуществляет обратное преобразование с помощью матрицы As-1;
при
моделировании преобразование координат не используется);
БУКП - блок управления координатными
преобразователями;
Регулирующая часть:
PC - регулятор скорости;
ЗО-звено ограничения;
РМ - регулятор момента;
РТС - регулятор токов статора;
РП - регулятор потокосцепления;
ЗИ - задатчик интенсивности;
Характеристика системы регулирования:
. Схема имеет замкнутую
систему регулирования проекций токов статора - замкнутая с регулированием по
отклонению (регулирование ведется в системе координат сориентированной по
вектору потокосцепления ротора, т.е. регулирует постоянные сигналы);
2. Система регулирования модуля
вектора потокосцепления ротора с регулятором потокосцепления - разомкнутая
система регулирования.
. Система регулирования
электромагнитного момента с регулятором момента - разомкнутая с регулированием
по возмущению (угловая скорость вращения ротора);
. Система регулирования
скорости - замкнутая с регулированием по отклонению (в реальной системе
скорость двигателя вычисляется на основании модели двигателя );
.2 Синтез регуляторов
Система регулирования строится на
принципах подчиненного регулирования, в основу которых заложены следующие
основные положения:
· Объект
регулирования представляется в виде последовательно соединенных звеньев.
· Разбиение объекта на звенья
производится из такого расчета, чтобы на выходе каждого звена была
физическаявеличина, которая представляет интерес с точки зрения регулирования и
контроля.
· На выходе регулирующей части
устанавливается фильтр с передаточной функцией:
 ,
,
где Тµ - некомпенсированная
постоянная времени.
Для каждой регулируемой координаты строится
замкнутая система регулирования с индивидуальным регулятором, на который
возложено две основные функции: компенсировать звено объекта регулирования
попавшего в контур и обеспечение астатизма контура (как минимум первого
порядка) по управляющему воздействию. Система при этом настраивается на
модульный оптимум. Физическим смыслом настройки на модульный оптимум является
то, что в полосе пропускания каждого контура коэффициент усиления равен 1 и
поэтому пренебрегаем изменением сигнала при прохождении через систему. При
настройке на модульный оптимум используется интегральный критерий качества
минимизирующий ошибку и ее производную.
3.2.1 Синтез регуляторов преобразованных токов
статора
Поскольку для обеих проекций тока статора звено
объекта попавшего в контур одинокого то рассмотрим синтез регулятора для одной
из проекций.
Расчетная схема для синтеза двухмерного
регулятора тока статора приведена на рис.3.2.
Рис.3.2. Расчётная схема САР тока
Передаточная функция имеет вид:
Некомпенсированную постоянную времени принимаем
равной Тµ=0.005 с, поскольку при использовании
частотно-регулируемого электропривода эта величина может быть выбрана намного
меньше, чем в аналогичном приводе постоянного тока. Ввиду того, что в
электроприводе переменного тока практически не существует ограничения на
частоту входных воздействий из за высокой частоты коммутации.
Звено объекта попавшего в контур имеет вид:
Расчет коэффициентов регулятора приведен выше.
Передаточная функция регулятора имеет следующий
вид:
 -"ПИ"
регулятор,
-"ПИ"
регулятор,
где Ti=2∙Tµ
-постоянная
времени регулятора тока статора исходя из настройки на модульный оптимум.
Замкнутая типовая передаточная функция контура
тока имеет вид:
3.2.2 Синтез
регулятора потокосцепления ротора
В данном проекте используется управление при
постоянстве потокосцепления ротора Ψr
= const, без учёта
изменения индуктивности lm*
= lm, поэтому
допускается использование схемы без регулятора потокосцепления, а подать на
вход САР тока сигнал  .
.
Величина задания на ток по координате Х
 ;
;
Величина задания потокосцепления
 ;
;
Схема регулятора
Рис. 3.3. Структурная схема для
синтеза регулятора потокосцепления ротора
3.2.3 Синтез регулятора электромагнитного
момента
Регулятор представлен в виде обратного звена
момента
m = кr
Ψr
isy - звено
момента (ЗМ)
isy
= (кr*Ψr)-1
m*
- регулятор момента (РМ)
Регулятор момента формирует частоту скольжения
координат. Нужно ввести в регулятор момента вычислитель абсолютного скольжения βΨr
βΨr
= rr* кr*
Ψr*isy*
ωΨr
= ω +
βΨr
Рис.3.4.Структурная схема регулятора
электромагнитного момента
При этом передаточная функция
разомкнутой системы имеет вид:
Т.е. контур момента имеет высокое
быстродействие, но на динамику оказывает влияние изменение потокосцепления
ротора.
3.2.4
Синтез регулятора угловой скорости
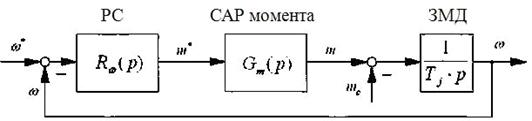
Рис. 3.5 Структурная схема для синтеза
регулятора скорости
С точки зрения требований к
электроприводу допускается относительное падение скорости 5% следовательно,
возможно использование "П" - регулятора скорости.При синтезе
пренебрегаем статическим моментом нагрузки.
Однако в преобразователе частоты
используется "ПИ" - регулятор скорости, а установка интегрального коэффициента
регулятора скорости невозможна. Ввиду этого будем синтезировать "ПИ"
- регулятор скорости; при синтезе, которого на входе системы появляется входной
фильтр со следующей передаточной функцией:
Передаточная функция регулятора
скорости имеет вид:
Где постоянные времени определяются
как:

для настройки на модульный оптимум.
Типовая передаточная функция
разомкнутой системы регулирования скорости настроена на симметричный оптимум и
имеет вид:

Типовая передаточная функция
замкнутой системы по управляющему воздействию имеет вид:

Типовой переходный процесс по
управляющему воздействию имеет следующие показатели качества:
· Время достижения
максимума tM= 18Тµ;
· Время переходного
процесса (время вхождения в 1% зону) tп.п =22,5Тµ
· Перерегулирование
по скорости σ=6.2%;
· Типовой переходный
процесс по возмущающему воздействию имеет следующие показатели качества:
· Время
восстановления tвoc=3.86Tω;
· Перерегулирование
по моменту σ =54%;
Механические характеристики системы
являются абсолютно жесткими ввиду того, что значение передаточной функции по
возмущающему воздействию в установившемся режиме:
 ;
;
Т.е. система не будет иметь ошибки
по возмущающему воздействию.
Найдем значение пропорционального и
интегрального коэффициентов регулятора скорости для установки соответствующих
параметров в преобразователе частоты.
Пропорциональный коэффициент
регулятора скорости:
 ;
;
Интегральный коэффициент регулятора
скорости в параметре под интегральным коэффициентом понимается постоянная
времени:
 ;
;
Далее эти значения могут быть
установлены в параметры преобразователя.
Структурная схема САУ представлена
на рис.3.6
3.3 Моделирование процессов в
частотно-регулируемом электроприводе
.3.1 Постановка задачи
Целью является построение следующих
математических моделей:
Модель частотно-регулируемого
асинхронного электропривода для уточнения оценки динамических характеристик
привода. При этом модель приближенно должна повторять расчетные параметры
тахограммы электропривода. Модель должна включать следующие основные элементы:
Модель векторной системы управления
электроприводом
Модель асинхронного двигателя К21F 315S6
3.3.2 Краткое описание приложения Simulink пакета MATLAB
Можно по разному реализовать
моделирование динамических процессов, в математическом описании которых
присутствуют дифференциальные уравнения, например, с помощью обычных языков
программирования (Си, Паскаль, и т.д.) написать программу, в которой будет
заложен определенный способ интегрирования (Рунге-Кутта, Эйлера, Адамса и
т.д.), но при большом количестве уравнений и переменных, входящих в модель, эта
задача представляет определенные трудности. Для моделирования динамических
процессов лучше всего подходит язык технических вычислений MATLAB и его приложение Simulink. В Simulink заложены алгоритмы
интегрирования, т.е. разработчику не нужно создавать программу для решения дифференциальных
уравнений. Simulink позволяет представить модель в виде отдельных блоков, что
облегчает осуществление контроля за переменными и программированием модели. Simulink является
объектно-ориентированным языком, т.е. позволяет без труда использовать
созданную модель в составе других моделей. Начиная с шестой версии, MATLAB позволяет создавать
удобный графический интерфейс для программного обеспечения, а также без потери
скорости, по сравнению с другими языками программирования, производить
моделирование процессов.
Благодаря обширному набору
оптимизированных математических алгоритмов, встроенных в MATLAB, разработчик может
сконцентрироваться на принципиальных аспектах, а не терять время на поиск,
разработку и отладку известных алгоритмов.
Исходя из вышеперечисленного MATLAB и его приложение Simulink являются наиболее
целесообразным выбором для реализации поставленной задачи.
Simulink
Пакет Simulink является ядром
интерактивного программного комплекса, предназначенного для математического
моделирования линейных и нелинейных динамических систем и устройств,
представленных своей функциональной блок-схемой, именуемой S-моделью, или просто моделью. При
этом возможны различные варианты моделирования: во временной области, в
частотной области, с событийным управлением, на основе спектральных
преобразований Фурье, с использованием метода Монте-Карло (реакция на
воздействие случайного характера) и т.д.
Для построения функциональной
блок-схемы моделируемых устройств Simulink имеет обширную библиотеку блочных компонентов и удобный редактор
блок-схем. Он основан на графическом интерфейсе пользователя и по существу
является типичным средством визуально-ориентированного программирования.
Используя палитры компонентов (наборы) пользователь с помощью мыши переносит
нужные блоки с палитр на рабочий стол пакета Simulink и соединяет линиями
входы и выходы блоков. Таким образом, создается блок-схема системы или
устройства, т.е. модель.
Simulink автоматизирует следующий, наиболее трудоемкий этап моделирования;
он составляет и решает сложные системы алгебраических и дифференциальных
уравнений, описывающих заданную функциональную схему (модель) обеспечивая
удобный и наглядный визуальный контроль за поведением созданного пользователем
виртуального устройства. Вам достаточно уточнить (если нужно) вид анализа и
запустить Simulink в режиме симуляции (откуда и название пакета - Simulink) созданной модели
системы или устройства. В дальнейшем мы будем использовать термин
"моделирование".
Средства визуализации результатов
моделирования в пакете Simulink настолько наглядны, что порой создается ощущение, что созданная в
виде блок-схемы модель работает "как живая". Более того, Simulink практически мгновенно
меняет математическое описание модели по мере ввода ее новых блоков, даже в том
случае, когда этот процесс сопровождается сменой порядка системы уравнений и
ведет к существенному качественному изменению поведения системы. Впрочем, это
является одной из главных целей пакета Simulink.
Ценность Simulink заключается и в
обширной, открытой для изучения и модификации библиотеке компонентов (блоков).
Она включает источники сигналов с практически любыми временными зависимостями,
масштабирующие, линейные и нелинейные преобразователи с разнообразными формами
передаточных характеристик, квантующее устройство, интегрирующие и
дифференцирующие блоки т.д..
В библиотеке имеется целый набор
виртуальных регистрирующих устройств от простых измерителей типа вольтметра или
амперметра до универсальных осциллографов, позволяющих просматривать временные
зависимости выходных параметров моделируемых систем - например, токов и
напряжений, перемещений, давлений и т.п.
Однако для эффективного применения
таких средств необходимы высокоскоростные решающие устройства. Интеграция одной
из самых быстрых матричных математических систем - MATLAB 7,0 - с пакетом Simulink открывает новые
возможности использования самых современных математических методов для решения
задач динамического и ситуационного моделирования сложных систем и устройств.
Средства графической анимации Simulink позволяют строить виртуальные физические лаборатории с наглядным
представлением результатов моделирования. Возможности Simulink охватывают задачи
математического моделирования сложных динамических систем в физике, электро - и
радиотехнике, в биологии и химии - словом во всех областях науки и техники.
Этим объясняется популярность данного пакета как в университетах и институтах,
так и в научных лабораториях.
И, наконец, важным достоинством
пакета является возможность задания в блоках произвольных математических
выражений, что позволяет решать типовые задачи, пользуясь примерами пакета Simulink или же просто задавая
новые выражения, описывающие работу моделируемых пользователем систем и
устройств. Важным свойством пакета является и возможность задания системных
функций (S-функций) с включением в состав библиотек Simulink. Необходимо отметить
также возможность моделирования устройств и систем в реальном масштабе времени.
Как программное средство Simulink - типичный
представитель визуально-ориентированного языка программирования. На всех этапах
работы, особенно при подготовке моделей систем, пользователь практически не
имеет дела с обычным программированием. Программа автоматически генерирует в
процессе ввода выбранных блоков компонентов, их соединений и задания параметров
компонентов.
Важное достоинство Simulink - это интеграция не
только с системой MATLAB, но и с рядом других пакетов расширения, что обеспечивает по
существу, неограниченные возможности применения Simulink для решения практически
любых задач имитационного и событийного моделирования.
.4 Моделирование
частотно-регулируемого электропривода
3.4.1 Математическая модель объекта
управления
В качестве базовой модели
используется уравнения электромагнитных контуров и уравнения связи обобщенной
электрической машины при следующих допущениях :
Магнитные силы создаваемые фазными
токами синусоидально направлены вдоль воздушного зазора (пренебрегаем высшими
пространственными гармониками);
Не учитывается влияние пазов;
Не учитывается насыщение, и потери в
стали;
Машина предполагается симметричная,
т.е. фазные обмотки имеют
одинаковое число витков;
Параметры ротора приведены к числу
витков обмотки статора.
При этих допущениях уравнения
обобщенной машины в декартовой вращающейся системе координат со скоростью ωк имеют вид:
Уравнение статорных цепей:
 ;
;
 ;
;
Уравнения роторных цепей:


Уравнения связи:




Уравнение момента:
 ,
,
где:
Usx,
Usy
-
проекции вектора напряжения статора во вращающейся системе координат.
Ψsx,
Ψsy
- проекции
вектора потокосцепления статора во вращающейся системе координат.
Ψrx,
Ψry
- проекции
вектора потокосцепления ротора во вращающейся системе координат.
Ψтх,
Ψmy
- проекции
вектора взаимоиндукции во вращающейся системе координат.
isx,
isy
- проекции
вектора тока статора во вращающейся системе координат.
irx,
iry
- проекции
вектора тока ротора во вращающейся системе координат.
Lsσ
Lrσ-индуктивностьрассеяния
статорныхи роторных цепей.
Lm
- индуктивность
взаимоиндукции.
Ls,
Lr
-полная
индуктивность статора и ротора.
Rs,
Rr
- активное
сопротивление статора и ротора.
ωк
- скорость вращения координатных осей.
ω - скорость
вращения ротора.
Рп - число
пар полюсов.
М, Мс - момент
двигателя и статический момент сопротивления механизма.
J∑
- суммарный
момент инерции механизма.
Система относительных единиц
Переход к системе относительных
единиц дает следующие преимущества:
· Параметры машин
переменного тока получаются одного порядка;
· Результаты
аналитического исследования и имитационного моделирования имеют большую степень
общности. Поскольку при изменении мощности электрических машин относительные
значения их параметров (например, активных и индуктивных сопротивлений обмоток)
и их относительные характеристики меняются в гораздо меньшей степени чем
абсолютные значения параметров и характеристики;
· Исключаются
некоторые коэффициенты из уравнений, что ведет к их упрощению;
· С точки зрения
реализации удобно проектировать, анализировать и проводить наладку, используя
относительные единицы;
В данном проекте используется
система базисных величин с ориентацией на электромагнитную мощность машины, при
этом время не масштабируется. В этом случаи получаем, что базисный момент равен
номинальному, а базисное напряжение является производной величиной.
Номинальная угловая частота напряжения статора
двигателя


Номинальная угловая частота вращения ротора
Номинальная угловая частота тока ротора
(абсолютное скольжение)

При описании базисных величин найдем
численные значения для двигателя K21F 315S6 данные которого приведены в таблице 2.2.
Система относительных единиц имеет
вид:
Основные базисные величины:
Базисная угловая частота:

Базисное значение момента:
МБ =MN =731 Нм.
Базисное значение мощности равное
значению электромагнитной мощности в зазоре:

где pn
- число
пар полюсов двигателя.
Базисная механическая частота
вращения ротора:
Базисные величины для цепей ротора и статора.
Базисное значение тока статора (ротора):

Величина тока статора по оси ОХ в номинальном
режиме

Величина тока статора по оси ОY
в номинальном режиме

Базисное значение напряжения статора (ротора):
 ,где
,где
m-число фаз.
Потокосцепление статора

Базисное потокосцепление статора (ротора):
Базисное полное сопротивление :
Базисная индуктивность статора (ротора):

После перехода к относительным
единицам система уравнений асинхронной машины принимает вид (все величины в
относительных единицах кроме времени):
Уравнение статорных цепей:
 ;
;
 ;
;
Уравнения роторных цепей:


где ТБ - базисная
постоянная времени определяется как:
Уравнения связи остаются без
изменения:
Уравнение момента:

где кr - коэффициент
связи ротора определяется как:

Уравнение движения для одномассовой
системы:
 ,
,
где механическая постоянная времени
и определяется как:

Далее при помощи уравнений связи
исключаем токи ротора и потокосцепления статора из вышеприведенной модели.
Система уравнений будет иметь вид:
Уравнение статорных цепей:
 ;
;
 ;
;
Уравнения роторных цепей:


Уравнение момента:
;
где
 -коэффициент
затухания роторных цепей при разомкнутых статорных;
-коэффициент
затухания роторных цепей при разомкнутых статорных;
-коэффициент
связи ротора;
 -постоянная
времени роторных цепей;
-постоянная
времени роторных цепей;
 -эквивалентная
индуктивность;
-эквивалентная
индуктивность;
 -эквивалентное
сопротивление;
-эквивалентное
сопротивление;
 -эквивалентная постоянная времени:
-эквивалентная постоянная времени:
Структурная схема асинхронного
двигателя с короткозамкнутым ротором на основании приведенных уравнений
приведена на рис 3.6:
Рис. 3.7. Структурная схема короткозамкнутого
асинхронного двигателя
Характеристика асинхронного двигателя как
объекта управления:
a)
Управляющее
воздействие - напряжение и переменные состояния (токи, потокосцепления) носят
явно выраженный векторный характер;
b)
Управляющее
воздействие содержит в себе две независимые компоненты: амплитуда и частота,
которые воздействуют на поток двигателя и синхронную скорость соответственно;
c)
Асинхронный
двигатель представляет собой двухмерный, динамический, не линейный объект
управления (в прямом канале 2 инерционных звена на каждую проекцию;
присутствуют множительные звенья);
d)
Два инерционных звена охвачены не линейной перекрестной обратной
связью ,глубина которых зависит от ωк и β
e)
Оба звена в целом охвачены еще и по ЭДС, которая наводится в
обмотке статора полями ротора;
f)
Звено момента является нелинейным ввиду того, что в нем
присутствует скалярное умножение векторов;
g)
Присутствующие перекрестные обратные связи существенно влияют на
динамику электропривода и требуют компенсации при реализации системы
управления.
Рис. 3.8. Структурная схема А.Д. в Matlab
3.4.2 Расчет параметров объекта
управления
Расчет параметров модели
асинхронного двигателя в относительных единицах производится с учетом принятых
относительных единиц (пункт 4.4.1 расчета). Обмоточные данные двигателя
приведены в таб.2.3.
При расчете параметров заданны для
модель построена на основе "Т" -образной схемы замещения асинхронного
двигателя.
Индуктивность рассеяния статорной
цепи в о.е.:

Индуктивность рассеяния роторной цепи в о.е.:

Коэффициент взаимной индукции обмоток статора и
ротора в о.е.:
Полная индуктивность обмотки ротора в о.е.:

Полная индуктивность статорных цепей
в о.е.:

Коэффициент затухания роторных цепей
при разомкнутых статорных в о.е.:
Коэффициент связи ротора в о.е.:
Постоянная времени цепи ротора:
 с
с
Эквивалентное сопротивление в о.е.:
rЭ = rs
+ кr2
rr
= 0,03 + 0,982∙0,019 = 0,048
Эквивалентная индуктивность в о.е.:
Э
= lsσ
+ кr2
lrσ=0,127+0,982∙0,083=0,206
Эквивалентная постоянная времени в
о.е.:

Механическая постоянная времени в
о.е.:

Определим проекции вектора
напряжения статора, во вращающейся системе координат со скоростью магнитного
поля статора, задавая одну из проекций. Напряжение питания при соединении
обмоток в звезду 380 В.
иsx. = 1,402 о.е.

3.4.3 Математическая модель системы
управления электроприводом
Предпосылки качественного
регулирования момента асинхронного двигателя) Ориентация системы
координат.
Ориентация системы координат
является математическим приемом и позволяет получить более простую модель
асинхронного двигателя. В тоже время ориентация системы координат является
эффективным техническим принципом, который используется для построения
высококачественных систем автоматического регулирования. При ориентации системы
координат одна из осей (как правило ОХ) совмещается с опорным вектором,
например:
· Вектор тока
статора;
· Вектор напряжения
статора;
· Вектор
потокосцепления статора;
· Вектор
потокосцепления взаимоиндукции;
· Вектор
потокосцепления ротора;
Выбор ориентирующего вектора связан
с конкретной задачей управления и в нашем случаи это вектор потокосцепления
ротора. Условием ориентации является:

ωк=ωψr -скорость
вращения координатных осей равна скорости
вращения вектора потокосцепления
ротора.
После этого система уравнений
асинхронного двигателя принимает вид:
Уравнение статорных цепей:
 ;
;
 ;
;
Уравнения роторных цепей:


Уравнение момента:
Уравнение движения для одномассовой
системы:
,
Абсолютное скольжение двигателя:

Поскольку в уравнении момента
коэффициент связи ротора величина постоянная и регулирование скорости ведется
без ослабления поля, то существует пропорциональность между током двигателя и
моментом. Из этих уравнений также видно, что проекция тока статора на ось ОХ
определяет поток двигателя, а проекция вектора тока статора на ось OY определяет
электромагнитный момент асинхронного двигателя.
При регулировании скорости не
используется ослабление поля (регулирование во второй зоне), то значение
потокосцепления ротора остается постоянным, следовательно, производной
потокосцепления ротора можно пренебречь, после этого уравнения роторных цепей
примут следующий вид:

b) Синтез блока компенсации
внутренних перекрестных связей. Для построения высококачественной системы
регулирования скорости необходимо компенсировать трансформаторную ЭДС и ЭДС
вращения:
 ;
;

Технически влияние этих ЭДС
компенсируется путем формирования задающих воздействий по следующим законам:
 ;
;
 ;
;
Это один из возможных методов
компенсации внутренних перекрестных обратных связей. Метод не идеален,
поскольку требует знания параметров асинхронной машины, которые могут меняться
в процессе работы (например, индуктивность взаимоиндукции зависит от насыщения
магнитной цепи, как и коэффициент связи ротора).
Структурная схема блока компенсации
внутренних перекрестных связей объекта приведена на рис. 3.9:
Рис. 3.9. Структурная схема блока
компенсации внутренних перекрестных связей объекта реализованная в приложении Simulink пакетаMATLAB.
После этого уравнения асинхронного
двигателя принимают вид:
Уравнение статорных цепей:
 ;
;
 ;
;
Уравнения роторных цепей:


Уравнение момента:
Уравнение движения для одномассовой
системы:
 ,
,
Абсолютное скольжение двигателя:
На основании этих уравнений
построена структурная схема асинхронного двигателя (рис. 3.10) для синтеза
регуляторов. В данной схеме не учтено пренебрежение производной потокосцепления
ротора.
Рис. 3.10. Структурная схема
асинхронного двигателя для синтеза регуляторов
Блок фильтров
В этом блоке реализована
некомпенсированная постоянная времени Тµ которая вводится
специально чтобы занизить быстродействие системы, что в свою очередь уменьшает
токи и моменты в переходных режимах. Фильтр представляет собой апериодическое
звено, где граничное значение этой постоянной определяется частотой коммутации
вентилей. Для преобразователя эта величина колеблется от 2,5 - 4 до 16 кГц ,
примем частоту коммутации:
fc =4 кГц,
Для того, чтобы система вела себя
корректно примем:

где Тµ - не
компенсированная постоянная времени,
В приложении Simulink , блок фильтров
выглядит таким образом:
Рис. 3.11 Блок фильтров
c) Синтез регуляторов
преобразованных токов статора.
Расчет коэффициентов регулятора
приведен выше.
Передаточная функция регулятора
имеет следующий вид:
 -"ПИ"
регулятор,
-"ПИ"
регулятор,
где Тi= 2∙Тµ=0,001c - постоянная времени
регулятора тока статора исходя из настройки на модульный оптимум.

 c
c
Замкнутая типовая передаточная
функция контура тока имеет вид:
В пакете Matlab приложении Simulink , регулятор токов
статора и окно выбора переменных выглядит вот так:
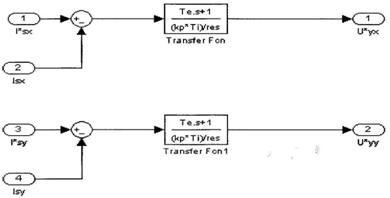
Рис. 3.12. Регулятор токов статора
d) Синтез регулятора потокосцепления ротора
Система регулирования потокосцепления
разомкнутая, поскольку нет информации о потокосцеплении ротора. В этом случаи
регулирование во второй зоне не производится, и поток остается неизменным во
время работы электропривода.
Регулятор потокосцепления ротора в этом случаи
будет иметь вид (для статического режима):
При этом система не рассчитана на управление
потокосцеплением в динамике и чувствительна к изменению параметров магнитной
цепи зависящих от насыщения.
В этом случаи динамика разомкнутой системы
определяется постоянной времени Тr, которая много больше Тµ
и при изменениях нагрузки, как показывают исследования, в результате
нагрева сильно меняется сопротивление ротора как составляющая Тr.
e) Синтез регулятора электромагнитного
момента
Регулятор момента стоится в виде обращенного
звена электромагнитного момента, причем, поскольку потокосцепление ротора не
изменяется то оно присутствует в регуляторе в виде коэффициента:
Также в функцию регулятора момента входит
определение угловой скорости вращения вектора потокосцепления ротора для
ориентации поля по вектору потокосцеплению ротора:
Величина задания на ток по координате Y:
 ;
;
Абсолютное скольжение исходя из проекции вектора
тока статора на ось OY:
 ;
;
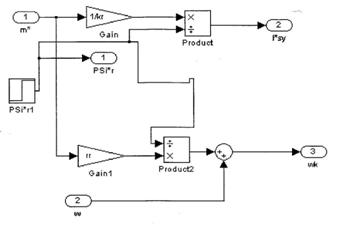
Рис 3.13. Структура регулятора момента
При этом передаточная функция разомкнутой
системы имеет вид:

Т.е. контур момента имеет высокое
быстродействие, но на динамику оказывает влияние изменение потокосцепления
ротора.
f) Синтез регулятора угловой скорости
С точки зрения требований к электроприводу
допускается относительное падение скорости 5% следовательно, возможно
использование "П" - регулятора скорости, но требование к САР таковы,
что нам необходимо использовать "ПИ" - регулятор скорости.
При синтезе пренебрегаем статическим моментом
нагрузки.
Ввиду этого будем синтезировать "ПИ" -
регулятор скорости; при синтезе, которого на входе системы появляется входной
фильтр со следующей передаточной функцией:
Передаточная функция регулятора скорости имеет
вид:
где постоянные времени определяются как:


для настройки на модульный оптимум.
Рис. 3.14. Структура регулятора скорости
Рис. 3.15. Структура входного фильтра
g) Задатчик интенсивности
Типовая передаточная функция разомкнутой системы
регулирования скорости настроена на симметричный оптимум и имеет вид:
 ;
;
Типовая передаточная функция замкнутой системы
по управляющему воздействию имеет вид:

Типовая передаточная функция замкнутой системы
по возмущающему воздействию имеет вид:

Типовой переходный процесс по управляющему
воздействию имеет следующие показатели качества:
· Время достижения максимума tm
=18∙Tµ=18∙0,0005
= 0,09;
· Время переходного процесса (время
вхождения в 1% зону)
tп.п
= 22,5Тµ = 22,5 0,0005 = 0,0113 ;
· Перерегулирование по скорости σ=6.2%;
Рис. 3.16 Типовые переходные процессы по
скорости контура скорости (сверху по управляющему воздействию, снизу по
возмущающему)
Типовой переходный процесс по возмущающему
воздействию имеет следующие показатели качества:
· Время восстановления tвoc
= 3,86∙Тω
= 3,86 • 0,002 = 0,0077;
· Перерегулирование по моменту σ=54%
Механические характеристики системы являются
абсолютно жесткими ввиду того, что значение передаточной функции по
возмущающему воздействию в установившемся режиме:

Т.е. система не будет иметь ошибки по
возмущающему воздействию.
Найдем значение пропорционального и
интегрального коэффициентов регулятора скорости для установки соответствующих параметров
в преобразователе частоты.
Пропорциональный коэффициент регулятора
скорости:

Интегральный коэффициент регулятора скорости в
параметре под интегральным коэффициентом понимается постоянная времени:

Результаты моделирования
При этом для обеспечения более плавного пуска
(без ударных моментов) производится предварительное намагничивание двигателя в
течении 1 с в соответствии с установленным параметром.
По сравнению с расчетной тахограммой имеются
некоторые переходные процессы, также присутствуют колебания момента это связано
с тем, что математическая модель преобразователя частоты представлена не в виде
коэффициента передачи, а виде ряда звеньев и учитывает его дискретность .
Значение максимального момента совпадает с расчетным. При значении
некомпенсированной постоянной времени 0.0005 с и использованием
"ПИ"-регулятора скорости переходный процесс по скорости практически
не отличается от задания.
При отработке тахограммы привод удерживает
нагрузку некоторое время необходимое для наложения механического тормоза, как и
было, описано при установке параметров преобразователя частоты.
Расчет начальных параметров для моделирования:
. Расчет номинального потокосцепления:

 о.е.
о.е.
В момент времени t=
0 c начинаем создавать
номинальный поток 0,5 с хватает, чтобы поток достиг своего номинального
значения.
2. Расчет номинального момента:
MN =МБ =731
Нм,
 о.е.
о.е.
Номинальный момент подадим в t
= 3,5
с так как привод выходит на номинальную скорость.
3. Расчет номинальной скорости:
ωз=1
Задание на скорость подаем в t = 0,5 с.
Покажем, что при моделировании типовой
тахограммы и нагрузочной диаграммы они практически не отличаются от расчетных.
Отличие в том, что на тахограмме и нагрузочной диаграмме представленных в
пакете Matlab имеют место
переходные процессы.
Рис. 3.17. Отработка типовой тахограммы крана с
использованием частотно -регулируемого электропривода
4. Разработка системы технологической автоматики
4.1 Описание контроллера SIMATIC
S7-300
•Модульный программируемый контроллер для
решения задач автоматизации различного уровня сложности.
•Широкий спектр модулей для максимальной
адаптации к решению любой задачи.
·
Возможность
использования распределенных структур ввода-вывода и простое включение в
различные типы промышленных сетей.
·
Удобная
для обслуживания конструкция и работа с естественным охлаждением.
·
Свободное
наращивание возможностей при модернизации системы.
·
Высокая
мощность, благодаря большому количеству встроенных функций.
SIMATIC S7-300C
·
Испытанная
технология S7-300.
·
Наличие
встроенных входов и выходов, возможность использования в качестве готовой
системы автоматизации.
·
Поддержка
функций скоростного счета, ПИД-регулирования и позиционирования на уровне
операционной системы центрального процессора.
•Расширение модулями S7-300.
SIMATIC S7-300F
·
Программируемый
контроллер для построения распределенных систем автоматики безопасности.
·
CPU 315F-2DP/
CPU 317F-2DP
с встроенными функциями автоматики безопасности и интерфейсом PROFIBUS
DP, поддерживающим
профиль PROFIsafe.
·
Системы
распределенного ввода-вывода на основе станций ЕТ 200М с F-модулями
и станций ЕТ 200S
PROFIsafe.
· Обеспечение
уровней безопасности SIL…SIL2
по IEC/EN
61508, а также категорий 1…4 по EN
954-1.
· Программируемый
контроллер для эксплуатации в тяжелых промышленных условиях.
· Проверенная
технология S7-300.
· Удобная
установка, программирование, обслуживание и эксплуатация.
· Идеальное
изделие для автомобилестроения, химической промышленности, установок для защиты
окружающей природной среды, различных производств, пищевой промышленности и
т.д.
· Заменяет
дорогостоящие системы специального назначения.
•Допускает временное обледенение печатных плат.
Модификации контроллеров
SIMATIC
S7-300 отвечают
требованиям национальных и международных стандартов и норм, включая:
· DIN
· Сертификат
UL
· Сертификат
CSA
· FM,
класс 1, группы А, В, С и D
(температурная группа Т4, до 135°С)
· Сертификат
соответствия Госстандарта России №РОССТ)Е.АЯ46.В61141 от 14.03.2003г.
подтверждает соответствие программируемых контроллеров SIMATIC
и их компонентов требованиям стандартов ГОСТ Р 50377-92 (стандарте целом), ГОСТ
29125-91 (п.2.8), ГОСТ 26329-84 (п.п. 1.2;1.3), ГОСТ Р 51318.22-99, ГОСТ
51318.24-99.
· Метрологический
сертификат Госстандарта России DE.C.34.004.A
№ 11994. Кроме того, SIMATIC S7-300 имеет
целый ряд морских сертификатов:
· Российского
морского регистра судоходства
·
BV (Bureau Veritas of Shipping)
·
DNV (Det Norske Veritas)
·
German Lloyd of Shipping
·
Lloyd Register of Shipping
·
Polski Rejestr Statkov (PRS)
Shipping
·
Registro Italiano Navale (RINA)
Shipping. Назначение
Области применения SIMATIC
S7-300 охватывают:
автоматизацию машин специального назначения; автоматизацию текстильных и
упаковочных машин; автоматизацию машиностроительного оборудования;
автоматизацию оборудования для производства технических средств управления и
электротехнической аппаратуры; построение систем автоматического регулирования
и позиционирования; автоматизированные измерительные установки и другие. Центральные
процессоры оснащены набором встроенных входов и выходов, а также набором
встроенных функций, что позволяет применять эти процессоры в качестве готовых
блоков управления. SIMATIC
S7-300 является
идеальным изделием для эксплуатации в тяжелых промышленных условиях,
отличающихся сильным воздействием вибрации и тряски, повышенной влажности,
широким диапазоном рабочих температур. Он способен управлять работой:
светофоров и систем управления движением; очистных сооружений; холодильных
установок; специальных транспортных средств; подвижного состава; строительных
машин и т.д.
Программируемые контроллеры SIMATIC
S7-300 в сочетании
со станциями распределенного ввода-вывода SIMATIC
ЕТ 200S
PROFIsafe и SIMATIC
ЕТ 200М, оснащенными F-модулями,
позволяют создавать распределенные системы автоматики безопасности (F-системы),
в которых возникновение аварийных ситуаций не создает опасности для жизни
обслуживающего персонала и угрозы для окружающей природной среды. На основе
распределенных структур могут создаваться системы, отвечающие требованиям
безопасности уровней SIL1
SIL 3 стандартов IEC/EN
61508, а также категорий 1 ... 4 стандарта EN
954-1. Такие системы находят применение: в автомобильной промышленности,
Машино- и станкостроении; для управления конвейерами; в обрабатывающей
промышленности; в системах управления пассажирским транспортом; в системах
материально-технического обеспечения и т.д. Конструкция
Контроллеры SIMATIC
S7-300 имеют
модульную конструкцию и могут включать в свой состав:
· Модуль
центрального процессора (CPU).
В зависимости от степени сложности решаемой задачи в контроллерах могут быть
использованы различные типы центральных процессоров, отличающихся
производительностью, объемом памяти, наличием или отсутствием встроенных
входов-выходов и специальных функций, количеством и видом встроенных
коммуникационных интерфейсов и т.д.
· Модули
блоков питания (PS),
обеспечивающие возможность питания контроллера от сети переменного тока
напряжением 120/230В или от источника постоянного тока напряжением
24/48/60/110В.
· Сигнальные
модули (SM),
предназначенные для ввода-вывода дискретных и аналоговых сигналов с различными
электрическими и временными параметрами.
· Коммуникационные
процессоры (CP) для
подключения к сетям PROFIBUS,
Industrial
Ethernet, AS-Interface
или организации связи через PtP
(point to
point) интерфейс.
· Функциональные
модули (FM), способные
самостоятельно решать задачи автоматического регулирования, позиционирования,
обработки сигналов. Функциональные модули снабжены встроенным микропроцессором
и способны выполнять возложенные на них функции даже в случае остановки
центрального процессора программируемого контроллера.
· Интерфейсные
модули (IM),
обеспечивающие возможность подключения к базовому блоку (стойка с CPU)
стоек расширения ввода-вывода.
Контроллеры SIMATIC
S7-300 позволяют
использовать в своем составе до 32 сигнальных и функциональных модулей, а также
коммуникационных процессоров, распределенных по 4 монтажным стойкам. Все модули
работают с естественным охлаждением. Конструкция контроллера отличается высокой
гибкостью и удобством обслуживания:
Все модули легко устанавливаются на профильную
рейку S7-300 и фиксируются
в рабочем положении винтом.
Во все модули (кроме модулей блоков питания)
встроены участки внутренней шины контроллера. Соединение этих участков
выполняется шинными соединителями, устанавливаемыми на тыльной стороне корпуса.
Шинные соединители входят в комплект поставки всех модулей за исключением
центральных процессоров и блоков питания. Наличие фронтальных соединителей,
позволяющих производить замену модулей без демонтажа внешних соединений и
упрощающих выполнение операций подключения внешних цепей модулей.
Подключение внешних цепей через фронтальные
соединители с контактами под винт или контактами - защелками. Механическое
кодирование фронтальных соединителей, исключающее возможность возникновения
ошибок при замене модулей.
Применение модульных и гибких соединителей SIMATIC
TOP Connect,
существенно упрощающих монтаж шкафов управления. Единая для всех модулей
глубина установки. Все кабели располагаются в монтажных каналах модулей и
закрываются защитными дверцами. Произвольный порядок размещения модулей в
монтажных стойках. Фиксированные места должны занимать только блоки питания,
центральные процессоры и интерфейсные модули. Допускается выполнять
горизонтальную (ось монтажной стойки ориентирована в горизонтальной плоскости)
и вертикальную установку стоек контроллера. При вертикальной установке
ухудшаются условия охлаждения модулей, поэтому верхняя граница допустимого
диапазона рабочих температур снижается. Система ввода-вывода
Система ввода-вывода программируемого
контроллера S7-300 может
включать в свой состав две части: систему локального и систему распределенного
ввода-вывода. Система локального ввода-вывода образуется модулями,
устанавливаемыми непосредственно в монтажные стойки контроллера. Система
распределенного ввода-вывода включает в свой состав станции распределенного
ввода-вывода и приборы полевого уровня, подключаемые к контроллеру через сети PROFINET,
PROFIBUS
DP и AS-Interface.
В зависимости от типа используемого центрального процессора системы локального
ввода-вывода программируемых контроллеров S7-300
могут включать в свой состав до 8 или до 32 сигнальных, функциональных и
коммуникационных модулей. Все модули устанавливаются в монтажные стойки
контроллера, функции которых выполняют профильные шины S7-300.
· В
состав системы может входить одна базовая (CR)
и до трех стоек расширения (ER).
В каждой стойке может размещаться до 8 сигнальных, функциональных и
коммуникационных модулей. В стойке CR устанавливается
центральный процессор.
Соединение стоек осуществляется с помощью
интерфейсных модулей. Каждая стойка снабжается собственным интерфейсным
модулем, устанавливаемым в смежный с центральным процессором разъем и
обеспечивающим автономное обслуживание связи с другими стойками системы.
Применение интерфейсных модулей IM
365 позволяет подключать к базовой стойке одну стойку расширения, удаленную на
расстояние не более 1м. Интерфейсные модули IM
360 и IM 361
позволяют подключать к базовой стойке до 3 стоек расширения. Расстояние между
стойками в этом случае может достигать 10м. Система локального ввода-вывода
программируемого контроллера S7-300
с CPU 312/ CPU
313 может включать в свой состав не более 8 сигнальных, функциональных и
коммуникационных модулей. Все модули в этом случае размещаются на одной
монтажной стойке. Промышленная связь
Контроллеры SIMATIC
S7-300 обладают
широкими коммуникационными возможностями:
· Коммуникационные
процессоры для подключения к сетям PROFIBUS
(с встроенным оптическим или электрическим интерфейсом), Industrial
Ethernet и AS-Interface.
· Коммуникационные
процессоры PtP для
использования последовательных (RS
232, TTY, RS
422/ RS 485)
каналов связи.
· MPI
интерфейс, встроенный в каждый центральный процессор и позволяющий создавать
простые и недорогие сетевые решения для связи с программаторами, персональными
и промышленными компьютерами, устройствами человеко-машинного интерфейса,
другими системами SIMATIC
S7/C7/WinAC.
· Центральные
процессоры с дополнительным встроенным интерфейсом PtP,
PROFIBUS
DP или Industrial
Ethernet. Центральные
процессоры S7-300 способны
поддерживать следующие виды связи:
· Циклический
обмен данными с устройствами распределенного ввода-вывода через сети PROFIBUS
или AS-Interface.
· Обмен
данными между интеллектуальными сетевыми станциями (программируемыми
контроллерами, устройствами и системами человеко-машинного интерфейса,
компьютерами и программаторами) через MPI,
RPOFIBUS или Industrial
Ethernet. Обмен данными
может осуществляться циклически или по прерываниям.
Настраиваемые параметры и функции
С помощью STEP
7 для всех центральных процессоров S7-300
может производиться настройка целого ряда параметров и функций:
•Определение сетевого (MPI,
PROFIBUS, Industrial
Ethernet) адреса станции.
· Определение
максимального времени сканирования программы, перезапуска и выполнения функций
самодиагностики.
· Определение
объема данных, сохраняемых при перебоях в питании: количества сохраняемых бит
памяти, таймеров, счетчиков и блоков данных.
· Определение
адресов тактовых флагов.
· Установка
паролей для обеспечения доступа к программе и данным.
· Системная
диагностика: определение порядка обработки диагностических сообщений.
· Периодичность
повторения временных прерываний: установка стартового времени и периодичности
повторения прерываний.
· Установка
периода срабатывания сторожевого таймера. Полный набор настраиваемых параметров
зависит от типа центрального процессора. Информационные и тестовые функции:
· Отображение
текущих состояний и ошибок: светодиодные индикаторы ошибок в аппаратуре,
программе, времени, вводе-выводе; режимов работы (RUN/STOP,
рестарт и т.д.).
· Тестовые
функции: программатор может быть использован для отображения состояний сигналов
во время выполнения программы, изменения переменных и состояний выходов
непосредственно в программе пользователя.
· Информационные
функции: программатор позволяет получать информацию о свободном объеме памяти
центрального процессора, его режиме работы, используемых объемах загружаемой и
рабочей памяти, текущем времени выполнения цикла программы, просматривать буфер
диагностических сообщений в текстовом формате. Системные функции: на уровне
операционной системы все центральные процессоры поддерживают широкий спектр
функций диагностики, настройки параметров, синхронизации, обработки сигналов
тревоги и т.д.
Программирование и конфигурирование
Для программирования и конфигурирования систем
автоматизации, построенных на основе программируемых контроллеров S7-300,
может использоваться весь спектр промышленного программного обеспечения SIMATIC:
·
Стандартные
инструментальные средства: STEP
7 Professional, STEP
7 или STEP7Lite.
Программное обеспечение, используемое для программирования, конфигурирования,
отладки и диагностики систем автоматизации SIMATIC
S7/ С7/ WinAC.
·
Инструментальные
средства проектирования: опциональное программное обеспечение, включающее в
свой состав языки программирования высокого уровня, а также графические языки
программирования и проектирования систем автоматизации SIMATIC.
Применение этого программного обеспечения существенно упрощает процесс
проектирования систем автоматизации, снижает сроки его выполнения.
·
Программное
обеспечение Runtime:
готовое к применению программное обеспечение, требующее для своего запуска
только предварительной настройки.
Таблица 4.1 Общие технические данные Контроллера
CPU 315-2 DP
|
Напряжение
питания, В:
|
24,00
|
|
Потребляемый
ток, А
|
-
|
|
на
холостом ходу, мА
|
60,00
|
|
номинальный,
А
|
0,80
|
|
Пусковой
ток, А
|
2,50
|
|
Потребляемая
мощность, Вт.
|
2,50
|
|
Рекомендуемая
защита цепей питания, А
|
2,00
|
|
Масса,
кг
|
0,29
|
4.2 Программа для контроллера
Описание переменных показано в таблице 4.2.
Таблица 4.2 Описание
переменных
|
Адрес
|
Описание
|
|
Е0.0
|
Ключ
безопасности
|
|
Е0.1
|
Автомат
главного контактора включен
|
|
Е0.2
|
Главный
контактор включен
|
|
Е0.З
|
Вводной
автомат включен
|
|
Е0.4
|
Люк
выхода к троллеям закрыт
|
|
Е0.5
|
Калитка
входа на мост закрыта
|
|
Е0.6
|
Дверь
входа в тамбур кабины закрыта
|
|
Е0.7
|
Люк
кабины крана закрыт
|
|
Е1.0
|
Рекуператор
готов к работе
|
|
Е1.1
|
Положение
джостика на движение моста вперед 25%ωn
|
|
Е1.2
|
Положение
джостика на движение моста вперед 50% ωn
|
|
Е1.3
|
Положение
джостика на движение моста вперед 75% ωn
|
|
Е1.4
|
Положение
джостика на движение моста вперед ωn
|
|
Е1.5
|
1й
конечный выключатель
|
|
Е1.6
|
2й
конечный выключатель
|
|
E1.7
|
Положение
джостика на движение моста назад 25% ωn
|
|
Е2.0
|
Положение
джостика на движение моста назад 50% ωn
|
|
Е2.1
|
Положение
джостика на движение моста назад 75% ωn
|
|
Е2.2
|
Положение
джостика на движение моста назад ωn
|
|
Е2.3
|
1й
конечный выключатель
|
|
Е2.4
|
2й
конечный выключатель
|
|
Е2.5
|
Положение
джостика на движение тележки вперед 25% ωn
|
|
Е2.6
|
Положение
джостика на движение тележки вперед 50% ωn
|
|
Е2.7
|
Положение
джостика на движение тележки вперед 75% ωn
|
|
Е3.0
|
Положение
джостика на движение тележки вперед ωn
|
|
Е3.1
|
1й
конечный выключатель
|
|
Е3.2
|
2й
конечный выключатель
|
|
ЕЗ.З
|
Положение
джостика на движение тележки назад 25% ωn
|
|
Е3.4
|
Положение
джостика на движение тележки назад 50% ωn
|
|
Е3.5
|
Положение
джостика на движение тележки назад 75% ωn
|
|
Е3.6
|
Положение
джостика на движение тележки назад ωn
|
|
Е3.7
|
1й
конечный выключатель
|
|
Е4.0
|
2й
конечный выключатель
|
|
Е4.1
|
Положение
джостика на движение вверх ГП 25% ωn
|
|
Е4.2
|
Положение
джостика на движение вверх ГП 50% ωn
|
|
Е4.3
|
Положение
джостика на движение вверх ГП 75% ωn
|
|
Е4.4
|
Положение
джостика на движение вверх ГП ωn
|
|
Е4.5
|
1й
конечный выключатель
|
|
Е4.6
|
2й
конечный выключатель
|
|
Е4.7
|
Положение
джостика на движение вниз ГП 25% ωn
|
|
Е5.0
|
Положение
джостика на движение вниз ГП 50% ωn
|
|
Е5.1
|
Положение
джостика на движение вниз ГП 75% ωn
|
|
Е5.2
|
Положение
джостика на движение вниз ГП ωn
|
|
Е5.3
|
1й
конечный выключатель
|
|
Е5.4
|
2й
конечный выключатель
|
|
М0.0
|
Движение
моста вперед режим 1
|
|
М0.1
|
Движение
моста вперед режим 2
|
|
М0.2
|
Движение
моста вперед режим 3
|
|
М0.3
|
Движение
моста назад режим 1
|
|
М0.4
|
Движение
моста назад режим 2
|
|
М0.5
|
Движение
моста назад режим 3
|
|
М0.6
|
Движение
тележки вперед режим 1
|
|
М0.7
|
Движение
тележки вперед режим 2
|
|
М1.0
|
Движение
тележки вперед режим 3
|
|
М1.1
|
Движение
тележки назад режим 1
|
|
М1.2
|
Движение
тележки назад режим 2
|
|
М1.3
|
Движение
тележки назад режим 3
|
|
Ml.4
|
ГП
движение вверх режим 1
|
|
М1.5
|
ГП
движение вверх режим 2
|
|
М1.6
|
ГП
движение вверх режим 3
|
|
М1.7
|
ГП
движение вниз режим 1
|
|
М2.0
|
ГП
движение вниз режим 2
|
|
М2.1
|
ГП
движение вниз режим 3
|
|
А0.0
|
Кран
готов к работе
|
|
А0.1
|
Работа
крана разрешена
|
|
А0.2
|
Движение
моста вперед режим 4
|
|
А0.3
|
Движение
моста вперед на пониженной скорости
|
|
А0.4
|
Аварийный
стоп
|
|
А0.5
|
Движение
моста назад режим 4
|
|
А0.6
|
Движение
моста назад на пониженной скорости
|
|
А0.7
|
Аварийный
стоп
|
|
А1.0
|
Движение
тележки вперед режим 4
|
|
А1.1
|
Движение
тележки вперед на пониженной скорости
|
|
А1.2
|
Аварийный
стоп
|
|
А1.3
|
Движение
тележки назад режим 4
|
|
А1.4
|
Движение
тележки назад на пониженной скорости
|
|
А1.5
|
Аварийный
стоп
|
|
А1.6
|
ГП
движение груза вверх режим 4
|
|
А1.7
|
ГП
движение груза вверх на пониженной скорости
|
|
А2.0
|
Аварийный
стоп
|
|
А2.1
|
ГП
движение груза вниз режим 4
|
|
А2.2
|
ГП
движение груза вниз на пониженной скорости
|
|
А2.3
|
Аварийный
стоп
|
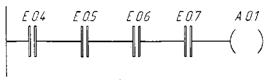
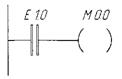
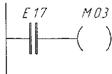
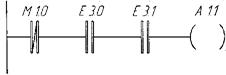
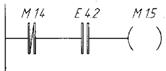
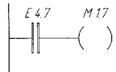
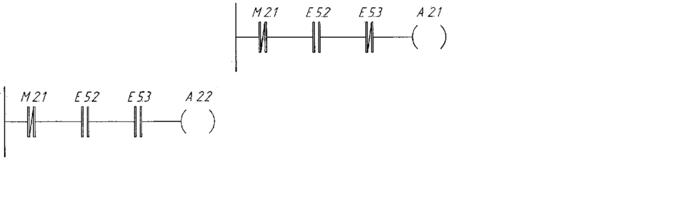
Network 1: готовность крана к работе

Network 2: работа на кране разрешена
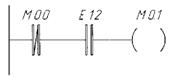
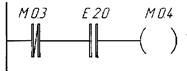
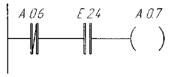
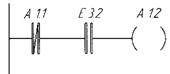
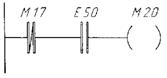
Network 3: движение крана вперед режим 1
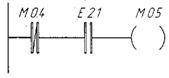
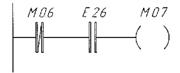
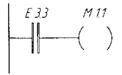
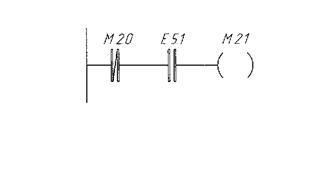
Network 4: движение крана вперед режим 2
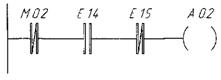
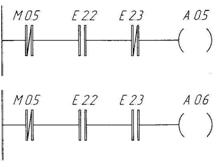
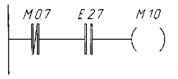
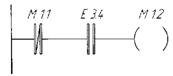
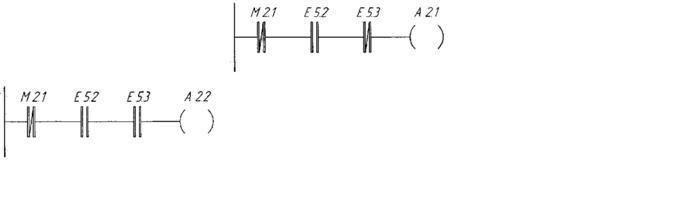
Network 5: движение крана вперед режим 3

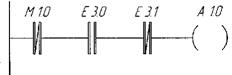
Network 6: движение крана вперед режим 4,
переход на пониженную скорость

Network 7: аварийный стоп
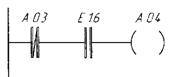
Network 8: движение крана назад режим 1
9: движение крана назад режим 2
Network 10: движение крана назад режим 3
Network 11: движение крана назад режим 4,
переход на пониженную скорость
Network 12: аварийный стоп
Network 13: движение тележки вперед режим 1
 14: движение
тележки вперед режим 2
14: движение
тележки вперед режим 2
Network 15: движение тележки вперед режим 3
Network 16: движение тележки вперед режим 4,
переход на пониженную скорость
Network 17: аварийный стоп
Network 18: движение тележки назад режим 1
Network 19: движение тележки назад режим 2
Network 20: движение тележки назад режим 3
Network 21: движение тележки назад режим 4,
переход на пониженную скорость
Network 22: аварийный стоп
Network 23: ГП движение вверх режим 1
Network 24: ГП движение вверх режим 2
Network 25: ГП движение вверх режим 3
Network 26: ГП движение вверх режим 4, переход
на пониженную скорость
Network 27: аварийный стоп
Network 28: ГП движение вниз режим 1
Network 29: ГП движение вниз режим 2
Network 30: ГП движение вниз режим 3
Network31: ГП движение вниз режим 4, переход на
пониженную скорость
Network 32: аварийный стоп
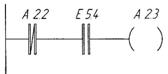
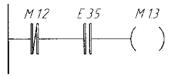
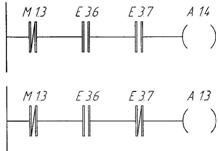
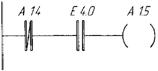
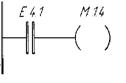
Алгоритм
5. Технико-экономическое обоснование проекта
.1 Введение
В последнее время наметилась устойчивая
тенденция к применению частотно регулируемых электроприводов мостовых кранов,
как в России, так и за рубежом обеспечиваются частотно - регулируемым приводом
плавные переходные процессы приводят к значительному снижению динамических
нагрузок в элементах кинематической цепи привода, что позволяет повысить
надежность и долговечность работы механического оборудования крана, отпадает
необходимость замены редуктора, тормозных колодок и, электродвигателя. Основной
причиной широкого применения регулируемого привода на кранах является снижение
энергопотребления при работе крана на 30-40%. Таким образом, экономический
эффект от внедрения частотно-регулируемого электропривода складывается из
экономии электроэнергии и снижения эксплуатационных затрат. Применение частотно
- регулируемых преобразователей позволяет использовать односкоростные
асинхронные двигатели с короткозамкнутым ротором общего применения.
.2 Исходные данные для расчета и капитальные
затраты по вариантам
Смета на приобретение нового оборудования
представлена в таблице
Таблица 5.1 Стоимость
электрооборудования
|
№
|
Наименование
оборудования
|
Количество
|
Стоимость
|
|
1
|
Шкаф
ввода и привода перемещения моста в составе: -шкаф Rittal с
монтажными панелями - 1 шт. -преобразователь Micromaster на 22кВт
- 1 шт. -предохранители, контакторы -элементы силового интерфейса (контакторы
, автоматические выключатели, предохранители, реле) -интерфейс шкафа
(источники питания, развязки, клемники и т.п.)
|
1
|
437388,0
|
|
2
|
Шкаф
привода главного подъема, в составе: -шкаф Rittal с
монтажными панелями - 1 шт. -преобразователь Micromaster на 120кВт
- 1шт. -предохранители, контакторы -элементы силового интерфейса (контакторы
, автоматические выключатели, предохранители, реле) -интерфейс шкафа
(источники питания, развязки, клемники и т.п.)
|
1
|
497840,0
|
|
3
|
Шкаф
привода перемещ. тележки + рекуператор, в составе: -шкаф Rittal с
монтажными панелями - 1 шт. -преобразователь Micromaster на
3.3кВт, - 1шт. -модуль рекуперации , - 1шт. -предохранители, контакторы -элементы
силового интерфейса (контакторы , автоматические выключатели, предохранители,
реле) -интерфейс шкафа (источники питания, развязки, клемники и т.п.)
|
1
|
533400,0
|
|
4
|
Оборудование
кабины в составе: -кондиционер - 1 шт. -пульт-кресло с аппаратами управления
- 1шт. -освещение кабины -сигнальная арматура -сенсорная панель оператора.
-центральный процессор -модули ввода/вывода; -автоматические выключатели;
|
1
|
853440,0
|
|
5.
|
Комплект
радиоуправления в составе: -пульт с аппаратами управления -1 шт -зарядное
устройство; -шкаф с контроллером (дешифратором);
|
1
|
337820,0
|
|
6
|
Общекрановое
оборудование,
в
составе: -эл. двиг. главного подъема -75 кВт. со встроенными вентиляторами -1
шт. -эл. двиг. перемещения тележки - 18,5 кВт. со встроенным вентилятором и
тормозом -1 шт. -эл. двиг. перемещ. моста - 22 кВт. со встроенными
вентиляторами и тормозами - 1 шт. -тормоз на привод гл. подъема ТКГ-300, 2шт.
-тормоз на привод вспом. подъема ТКГ-400, 2шт. -ограничитель грузоподъемности
с функцией регистратора параметров (ОНК); -конечные выключатели для
механизмов подъема -конечные выключатели для механизмов перемещения
-ультразвуковые датчики (система противостолкновения кранов) -освещение
подкрановое -освещение аварийное
|
1
|
3733800,0
|
|
7
|
Неучтенные
материалы, запасные части 15% от стоимости оборудования. Кабель.
|
1
|
640080,0
|
|
8
|
Проектные
работы, промышленная экспертиза РД: электроприводы механизмов крана, система
управления электроприводами
|
1
|
533400,0
|
|
9
|
Наладка
и ввод в эксплуатацию Электрооборудование крана
|
1
|
|
ИТОГО:
|
8420608,0
|
Цены на приобретение оборудования указаны на
сайте www.siemens.com 2012г.
Капитальные вложения состоят из затрат на
приобретение оборудования, материалов, комплектующих, транспортных расходов,
затрат на установку и монтаж оборудования и комплектующих, а также расходов,
связанных с внедрением мероприятия - демонтаж старого оборудования,
переобучение персонала и т.д.
Ликвидационная стоимость демонтированного
оборудования (реализация на сторону или по цене лома) из суммы капитальных
вложений вычитается. В расчётах примем, что затраты на демонтаж оборудования
равны ликвидационной стоимости.
Итого затраты:
Здоп =8420608 руб.
.3 Определение годового экономического эффекта
Экономический эффект может быть достигнут в
результате:
1)
снижения
эксплуатационных издержек;
2)
повышения
объема выпуска продукции;
3)
повышения
качества продукции.
Для нахождения экономического эффекта от
снижения эксплуатационных издержек рассчитываются наиболее существенно
изменяющиеся в результате внедрения мероприятия статьи затрат на выпуск
продукции. Это могут быть следующие статьи:
затраты на энергетические ресурсы ;
амортизационные отчисления;
затраты на ремонт.
Годовые эксплуатационные издержки определяются
отдельно для каждого из двух вариантов - до внедрения мероприятия и после внедрения,
затем сравниваются. Их разница и составляет годовой экономический эффект от
снижения эксплуатационных издержек.
5.3.1 Затраты на энергетические ресурсы
)Расчет экономии за счет уменьшения потребления
электроэнергии
электрической части мостового крана.
По паспортным данным системы ПЧ-АД потребляют:
Мощность двигателей после модернизации:
а)Гл. подъём - 75 кВт.
б)Вс. подъём - 45 кВт.
в)Перемещение телеги - 18,5 кВт.
г)Перемещение моста - 4•22 кВт.
Итого: Pпм=226.5
Мощность двигателей до модернизации:
а) Гл. подъём - 120 кВт.
б)Bс.
подъём - 55 кВт.
в)Перемещение телеги - 22 кВт.
г)Перемещение моста - 4•28 кВт.
Итого: Рдм=309 кВт
Затраты на потребленную электроэнергию за год
составят:
Для системы АД с фазным ротором и блоком
сопротивлений до модернизации
ЭЭС1 = 309 • 2 • 2070 •
3,504 = 4482527 руб.,
где 2070 - годовой сменный фонд рабочего
времени, час;
- число смен; 3,504 кВт/час - стоимость
электроэнергии для предприятий. Для системы ПЧ-АД после модернизации
ЭЭС2 = 226,5 • 2 • 2070 • 3,504 =
3285735 руб.
∆Эсс = ЭЭС1 - ЭЭС2,
∆ЭСС = 4482527 -
328857= 1196791 руб.
2)Расчет экономии за счет уменьшения
потребляемой электроэнергии электрооборудования (без системы электропривода).
Суммарная потребляемая мощность
электрооборудования крана: до модернизации Р1=30кВт; после модернизации Р2=22кВт.
Затраты составят:
до модернизации
ЭС01 = 30 • 2 • 2070 • 3,504 =
435196,8 руб.,
после модернизации
ЭС02 = 22 • 2 • 2070 • 3,504 =
319144,31 руб.
∆ЭС0
=435196,8 -319144,31= 116052,48 руб.
3) Расчет экономии за счет повышения КПД
крана.
Величина потерь составит:
до модернизации
∆Э01 = ЭС01 - (ЭС01
• η1),
∆Э01
=435196,8 -(435196,8 •0,69) = 134911 руб;
после модернизации
∆Э02 =319144,31-(319144,31•0,93)
= 22340 руб.
Снижение потерь составит:
∆Пот = ∆Э01
- ∆Э02
∆Пот = 134911-22340 = 112570
руб.
Итого:
Э∑ = ∆ЭСC
+ ∆Эсо + ∆Пот
,
Э∑ = 1196791+ 116052 + 112570 =
1425413 руб.
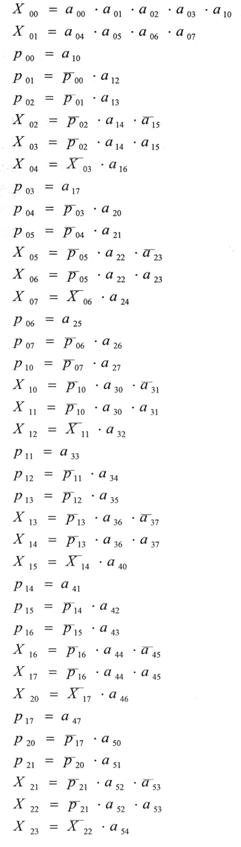
.3.2 Амортизационные отчисления
Амортизационные отчисления для данной системы:
где НА=4%- норма амортизации, при
сроке эксплуатации 25 лет.

5.3.3 Стоимость
ремонта
Стоимость ремонта определяется по следующим
показателям: Величина
Срем=
(Нм•Rм+Нэ•Rэ)
где Нм , Нэ - среднегодовые
нормативы на единицу ремонтной сложности механической и электротехнической
частей крана, руб.
Rm
,
Rэ
-категория
сложности ремонта крана ( механической, электротехнической части ).
Э1
= 6,41 т.
руб.;
НЭ2
=5,06 т.
руб.;
RЭ1
=
8; RЭ2
= 5; где,
НЭ1 - среднегодовые
нормативы на единицу ремонтной сложности электротехнической части до
модернизации;
НЭ2 - среднегодовые
нормативы на единицу ремонтной сложности электротехнической части после
модернизации;
RЭ1 -
категория сложности ремонта крана электротехнической части до модернизации;
RЭ2
-
категория сложности ремонта крана электротехнической части после модернизации.
Так как механическую часть мы не изменяем, то и
норматив и сложность работ механической части остаётся неизменным.
∆СРЕМ
= НЭ1•RЭ1-
НЭ2•RЭ2
∆СРЕМ = 6,41• 8 - 5,06 • 5 =
25,98 т.р.
Модернизация станка позволит нам изготавливать
технологически более сложную и точную продукцию, что ведёт к увеличению
производительности крана.
По данным специалистов предприятия рост объёма
производства на данном участке, где заработал кран, составил 48%. Тогда выручка
до модернизации 1560 т.р., после - 2309 т.р.
По данным специалистов предприятия,
рентабельность до модернизации составляла 9%, после - 22%.
П1 =1560•0,09 = 140 т.р. П2
=2309•0,22 = 507 т.р.
∆П = 507 -140 = 367 т.р. где
,
П1- прибыль до модернизации,
П2 - прибыль после модернизации, ∆П
- прирост прибыли.
5.3.4 Снижение заработной платы основных рабочих
До модернизации работали: двое основных рабочих
и один обслуживающий инженер по наладке и испытаниям.
ЗПС
= Сч
• кдп
• кпр
• ксоц
•np•Fd ,где
ЗПС- заработная плата рабочего до
модернизации;
Сч= 109,24. - часовая ставка рабочего
4-го разряда;
кдп=1,2 - коэффициент дополнительных
выплат;
кпр=1,1 - премии;
ксоц=1,34 - коэффициент, учитывающий
отчисления на социальные нужды;
np=2
- количество рабочих;
Fd=1860
ч. - действительный годовой фонд рабочего времени (по нормативно-справочному
материалу).
ЗПС = 109,24 • 1,2 •
1,1 • 1,34 • 2 • 1860 = 718792,2 руб.
ЗПи= Сч • кдп • кпр
• ксоц • коб, где
Сч=150 р. - часовая ставка инженера;
кдп= 1,2 - коэффициент дополнительных
выплат; кпр=1,1 - премии;
ксоц=1,34 - коэффициент, учитывающий
отчисления на социальные нужды; Fd=1860
ч. - действительный годовой фонд рабочего времени (по нормативно-справочному
материалу);
коб=0,2 - коэффициент обслуживания.
ЗПИ =150•1,2•1,1
• 1,34 • 1860 • 0,2 = 98699,04 руб;
ЗП1 = ЗПС + ЗПИ,
ЗП1 = 718792,2
6 + 98699,04 = 817491,3 руб, где
ЗП1
- зарплата до модернизации основных рабочих.
После модернизации будут работать только два
специалиста, с более высоким разрядом, причём они одновременно могут
обслуживать несколько кранов.
ЗПи=
Сч
• кдп
• кпр
• ксоц
• nр
• Fd
•коб,
, где
ЗПС- заработная плата рабочего до
модернизации;
Сч=116,78 р. - часовая ставка
рабочего 6-го разряда;
кдп=1,2 - коэффициент дополнительных
выплат; кпр=1,1 - премии;
ксоц=1,34 - коэффициент, учитывающий
отчисления на социальные нужды; nр=2
- количество рабочих;
Fd=l860
ч. - действительный годовой фонд рабочего времени (по нормативно-справочному
материалу;
коб=0,4 - коэффициент
обслуживания.
ЗПС =116,78 •1,2•1,1 •1,34•2•1860•0,4
= 307361,97 руб.
после модернизации основных рабочих.
∆ЗП = ЗП1-ЗП2
∆ЗП = 817491,3 - 307361,97 =
510129,32 руб.
.3.5 Определение срока окупаемости
Итого экономический эффект:
ЭЭФ
=∆ЭСС+∆ЭСО+∆Пот+∆П+∆ЗП-ЗАМОР
ЭЭФ =
1425413+116052+112570,89+367000+510129,32-323351,34 = 285451 руб
Срок окупаемости проекта:
Полученные данные сведём в таблицу 5.2.
Таблица 5.2 Технико-экономических
показатели
|
Показатель
|
Единицы
измерения
|
Значение
|
|
|
1-й
вариант
|
2-й вариант
|
|
Капитальные
затраты
|
|
|
|
|
Стоимость
оборудования
|
руб.
|
3285735,0
|
4482527,0
|
|
Транспортные
расходы
|
руб.
|
11050,0
|
13400,0
|
|
Затраты
на монтаж и наладку
|
руб.
|
853400,0
|
853400,0
|
|
Итого
|
|
4150185,0
|
5349327,0
|
|
Эксплуатационные
расходы
|
|
|
|
|
Амортизационные
отчисления
|
руб.
|
323351,0
|
360200,0
|
|
Затраты
на ремонт и обслуживание
|
руб.
|
307362,0
|
817491,0
|
|
Итого
|
|
630712,0
|
1177691,0
|
|
Годовая
экономия по эксплуатационным расходам
|
руб.
|
1199142,0
|
|
|
Экономия
по капитальным затратам
|
руб.
|
902042,0
|
|
.4 Выводы
1) Внедрение частотно - регулируемого
электропривода позволяет:
·
Значительно
на 30 - 50 % снизить энергопотребление на кранах;
·
Сократить
затраты на дополнительное оборудование
·
Улучшить
условия эксплуатации
·
Исключить
динамические нагрузки
2) Поскольку,
при установке частотно - регулируемого электропривода капитальные вложения меньше
и меньше энергопотребление по сравнению с нерегулируемым электроприводом то
выбор этого варианта является очевидным.
3) Срок
окупаемости составляет приблизительно 2,9 года, что ниже норматива предприятия
(6лет).
Не менее важную роль в снижении издержек
занимает сокращение расхода энергии, что достигается за счёт экономии
электрической энергии и повышения КПД. Также значительный экономический эффект
дает и снижение заработной платы основных рабочих вследствие повышения
автоматизации процесса
6. Безопасность жизнедеятельности
6.1 Введение
Человек, его права и свободы
являются высшей ценностью российского государства. Признание, соблюдение и
защита прав и свобод человека и гражданина - обязанность государства. Данные
положения закреплены в Конституции Российской Федерации. Поскольку человек
является высшей ценностью, то возникает необходимость у государства в
обеспечении защиты жизни и здоровья человека. Правовые
мероприятия заключаются в создании системы правовых норм, устанавливающих
государственные стандарты безопасных условий труда, и правовых средств по
обеспечению их соблюдения. Эта система основывается на Конституции РФ и
включает в себя: федеральные законы, законы субъектов РФ, подзаконные
нормативные акты органов исполнительной власти РФ и субъектов РФ, а также
локальные нормативные акты, принимаемые на конкретных предприятиях и в
организациях.
Правовые основы регулирования отношений в
области охраны труда между работодателями и работниками и направленные на
создание условий труда, соответствующих требованиям сохранения жизни и здоровья
работников в процессе трудовой деятельности в первую очередь закреплены в
Трудовом кодексе Российской Федерации (ТК РФ), Федеральном законе "Об
обязательном социальном страховании от несчастных случаев и профессиональных
заболеваний" № 125-Ф3 от 24.07.1998г. с изменениями от 21.07.2007г. Так же
на основе законодательных актов разработаны подзаконные акты - Постановление
Правительства Российской Федерации от 24.04.2002 г. № 28 "О создании
системы сертификации производственных объектов на соответствие требованиям по
охране труда", ряд ГОСТов и СНиПов и др.
Безопасность жизнедеятельности (БЖД) - это
комплекс мероприятий, направленных на обеспечение безопасности человека в среде
обитания, сохранение его здоровья, разработку методов и средств защиты путем
снижения влияния вредных и опасных факторов до допустимых значений, выработку
мер по ограничению ущерба в ликвидации последствий чрезвычайных ситуаций
мирного и военного времени.
Среда обитания складывается из следующих элементов:
производственной среды, бытовой среды, окружающей среды (в чрезвычайных
ситуациях мирного и военного времени). Обеспечением безопасности
жизнедеятельности человека в условиях производственной среды и трудового
процесса занимается охрана труда.
Обеспечение безопасности осуществляется тремя
основными методами:
пространственным и временным разделением зон
деятельности человека с зонами возникновения опасностей и вредностей.
Достигается это автоматизацией производства, рациональной организацией труда,
планированием производственного пространства и т.д.
нормализацией зоны, где возникают опасности и
вредности, за счет изменений в конструкции машин, использования вентиляции,
звукоизоляции, улучшения производственного освещения и т.д.
адаптацией человека к производственной среде и
повышением его защищенности. Например, за счет обучения, использования средств
индивидуальной защиты и т.д.
Обеспечение безопасности жизнедеятельности
человека в условиях производственной среды и трудового процесса не возможно без
применения комплексного подхода, заключающегося в разработке взаимосвязанных
мероприятий различной направленности. Поэтому охрана труда, согласно ТК РФ -
это система сохранения жизни и здоровья работников в процессе трудовой
деятельности, включающая в себя правовые, социально-экономические,
организационно-технические, санитарно-гигиенические, лечебно-профилактические,
реабилитационные и иные мероприятия.
Под условиями труда понимается совокупность
факторов производственной среды и трудового процесса, оказывающих влияние на
здоровье и работоспособность человека в процессе труда
Под безопасными условиями труда понимаются такие
условия труда, при которых воздействие вредных и опасных производственных
факторов на работающих исключено или их уровни не превышают гигиенических
нормативов.
Социально-экономические мероприятия включают:
меры государственного стимулирования работодателей с целью улучшения условий и
охраны труда; установление компенсаций и льгот за выполнение тяжелых работ, а
также за работу во вредных и опасных условиях труда; защиту отдельных категорий
работников (женщин, молодежи, инвалидов и т.д.); обязательное социальное
страхование и выплату компенсаций при возникновении профессиональных
заболеваний и производственных травм и т.д.
Организационно-технические мероприятия на уровне
предприятия заключаются в планировании, осуществлении и контроле проведения
мероприятий по охране труда, в том числе организации обучения руководителей и
сотрудников, информировании работников о наличии (отсутствии) вредных и опасных
факторов, их правах и обязанностях; аттестации рабочих мест по условиям труда и
сертификации работ по охране труда; а также во внедрении новых безопасных
технологий, машин, механизмов и материалов; повышении дисциплины труда и т.д.
Санитарно-гигиенические мероприятия заключаются
в проведении работ, направленных на снижение вредных производственных факторов
с целью предотвращения профессиональных заболеваний.
Лечебно-профилактические мероприятия включают в
себя первичные и периодические медицинские осмотры, организацию
лечебно-профилактического питания и т.д.
Реабилитационные мероприятия подразумевают
обязанность работодателя перевести работника на более легкую работу в
соответствии с медицинскими показаниями, лечение, медицинскую и профессиональную
реабилитацию и т.д.
В данном дипломном проекте рассматривается
применение частотно-регулируемых электроприводов в крановом хозяйстве на
металлургических предприятиях. Мостовой кран является вспомогательным
механизмом в металлургическом цикле. Вопросы безопасности и экологичности
проекта, будем рассматривать, применительно к мостовому крану. Особое внимание
уделим рабочему месту оператора и машинному отделению - местами, где
вероятность производственного травматизма наиболее велика.
Краткая характеристика объекта
Мостовой кран является вспомогательным
механизмом в производственном цикле. Вопросы безопасности и экологичности
проекта, будем рассматривать, применительно к мостовому крану. Особое внимание
уделим рабочему месту оператора и машинному отделению - местами, где
вероятность производственного травматизма наиболее велика.
6.2 Безопасность труда
6.2.1 Идентификация опасных и
вредных производственных факторов
Под условиями труда понимается совокупность
факторов производственной среды и трудового процесса, оказывающих влияние на
здоровье и работоспособность человека в процессе труда.
Под безопасными условиями труда понимаются такие
условия труда, при которых воздействие вредных и опасных производственных
факторов на работающих исключено или их уровни не превышают гигиенических
нормативов.
Гигиенические нормативы условий труда - уровни
вредных производственных факторов, которые при ежедневной (кроме выходных дней)
работе, но не более 40 часов в неделю в течение всего рабочего стажа, не должны
вызывать заболеваний или отклонений в состоянии здоровья, обнаруживаемых
современными методами исследований в процессе работы или в отдаленные сроки
жизни настоящего и последующего поколений.
К вредным факторам относят такие, которые
действуют на протяжении длительного времени и, несмотря на низкий уровень,
постепенно могут нанести вред здоровью и жизни человека; однако при
кратковременном воздействии организм человека способен реабилитироваться без
каких либо последствий. К опасным факторам относят такие факторы, которые при
кратковременном воздействии могут привести к увечью или смерти.
К вредным факторам, оказывающим воздействие на
оператора мостового крана относятся: шум, недостаточная освещенность, вибрация,
повышенная запыленность и загазованность, повышенная температура или резкие
колебания температуры окружающей среды (от минусовой до +60-70 °С), высокая
влажность (до 80-90%), влияние химических реагентов. К опасным относятся сам
мостовой кран, как подъемно-транспортная машина, электрооборудование мостового
крана. Остановимся на некоторых факторах подробнее.
.2.2
Шум
Шумом называют всякий неблагоприятно действующий
на человека звук. Обычно шум является сочетанием звуков различной частоты и
интенсивности.
Защита от производственного шума имеет большое
значение. Шум вызывает психические и физиологические нарушения, воздействуя на
организм человека, снижает работоспособность и создает предпосылки к
возникновению заболеваний и производственного травматизма. Сильный
продолжительный шум может стать причиной функциональных изменений
сердечнососудистой и нервной систем, также может привести к ухудшению слуха и к
глухоте. Воздействую на кору головного мозга, шум оказывает раздражающее
действие, ускоряет процесс утомления, ослабляет внимание, замедляет скорость
реакции. Предельно допустимые величины шума (ГОСТ 12.1.003-83 ССБТ) , которые
при ежедневном систематическом воздействии на человека в течение всего дня и в
течение многих лет не вызывают существенных заболеваний организма человека и не
мешают его нормальной деятельности. В табл. 29 приведены допустимые уровни шума
на рабочем месте. Основой нормирования шума является ограничение звуковой
энергии, воздействующей на человека в течение рабочей смены безопасными для его
здоровья и работоспособности. Так как машинное помещение является рабочим
местом оператора мостового крана, то в нашем случае нормирование производится
по СН 2.2.4/2.1.8.562-96 "Шум на рабочих местах, в помещениях жилых,
общественных зданий и на территории жилой застройки".
Таблица 6.1 Нормативные
значения уровня шума (ГОСТ 12.1.003-88)
|
Рабочие
места
|
Уровни
звукового давления, дБ, в октавных полосах со среднегеометрическими
частотами, Гц.
|
Уровни
звука и эквивалентные уровни звука, дБ
|
|
63
|
125
|
250
|
500
|
1000
|
2000
|
4000
|
8000
|
|
|
Помещения
управлений, рабочие комнаты (кабина крана)
|
79
|
70
|
68
|
58
|
55
|
52
|
50
|
49
|
60
|
|
Постоянные
рабочие места и рабочие зоны в производственном помещении
|
99
|
92
|
85
|
83
|
80
|
78
|
76
|
74
|
85
|
По требованиям к электроприводу уровень
звукового давления в кабине крановщика не должен превышать 50 дБ. По сравнению
с рабочим местом, для которого при среднегеометрической частоте 4000 Гц
(частота коммутации преобразователя частоты) звуковое давление может составлять
76 дБ показатель 50 дБ довольно высокий.
Источником шума в нашем случае будет являться
приводной двигатель, питаемый от преобразователя частоты и редуктор. Причем за
счет использования широтно-импульсной модуляции выходного напряжения значения
звукового давления от работающего двигателя увеличивается с 46 до 69 дБ при
частоте коммутации 4 кГц.
Меры, предпринимаемые для борьбы с шумом
следующие:
·
Использование
электрических фильтров на выходе инвертора напряжения позволяет снизить уровень
звукового давления до 49 дБ
·
Шумное
оборудование (редуктор, двигатель) размещено в отдельном помещении
При указанных мерах уровень звукового давления в
машинном помещении не превышает 49 дБ, а в кабине крановщика составляет еще
более меньшую величину.
6.2.3
Освещенность
Неудовлетворительное количество или качество
освещения не только утомляет зрение, но и вызывает утомление организма в целом.
Плохо освещенные зоны ухудшают видимость что может привести к повышенному
травматизму и несчастным случаям.
Большое значение имеет освещенность. Расчет
искусственного освещения производится методом коэффициента использования
светового потока, так как освещение рабочего места происходит не только за счет
светового потока, падающего от светильника, но и за счет светового потока,
отраженного от стен и элементов оборудования (пост приказов в кабине
крановщика). Этот метод дает возможность найти световой поток при заданной
освещенности.
Согласно нормам искусственного освещения по ГОСТ
12.1.046-85 , нормируемая освещенность в кабане крановщика должна составлять:
·
150
лк - при лампах накаливания,
·
300
лк - при люминесцентных лампах,
Согласно нормам искусственного освещения по ГОСТ
12.1.046-85 , нормируемая освещенность в машинном зале (при постоянном
пребывании людей) должна составлять:
·
50
лк - при лампах накаливания,
·
100
лк - при люминесцентных лампах, Коэффициент пульсации - не более 20%.
Освещенность в кабине крановщика составляет 200
лк при использовании ламп накаливания, что полностью соответствует нормам.
6.2.4
Вибрация
Вибрация - это колебания твердых тел (частей
аппаратов, машин, оборудования, сооружений), воспринимаемые организмом человека
как сотрясения. Вибрация оказывает вредное воздействие на здоровье человека.
Гигиенические нормы вибрации определены ГОСТ 12.1.012-90 "Вибрационная
безопасность" Вибрация неблагоприятно воздействует на организм человека,
она может быть причиной функциональных расстройств нервной и сердечнососудистой
систем, а также опорно-двигательного аппарата, так как внутренние органы и
отдельные части тела человека (сердце, голова и т.п.) можно рассматривать как
колебательные системы с собственной частотой колебаний в диапазоне от 6 до 8
Гц. Воздействие внешних колебаний может вызвать резонанс, что может привести к
смещению или повреждению внутренних органов человека.
По характеру действия на организм человека
вибрацию принято разделять на общую и локальную. Общая вибрация передается на
все тело человека (сотрясение поля, площадки, сидения, на котором сидит
человек), а локальная - на отдельные его части, непосредственно соприкасающиеся
с участком вибрации. Возможно комбинированное действие общей и локальной
вибраций. Источником вибрации является двигатель. Особенно вибрация ощущается
при пуско-тормозных режимах работы электропривода крана. При работе
электродвигателя и приводимой им лебедки возникают низкочастотные вибрации, вызванные
инерционными силами, силами трения, периодическими нагрузками. Согласно ГОСТ
12.1.012-90 уровень вибрации на рабочем месте не превышает предельно-допустимых
норм (75дБ на частотах 16, 31,5 и 63 Гц). Вибрация определяется по формуле

где 5*10-8м/с соответствует величине
действующей колебательной скорости при стандартном пороге звукового фона и
частоте 1000Гц.
Дня снижения вибрации принимаются следующие
меры:
·
В
отличие от ранее используемого электропривода на основе четырехскоростного
двигателя, где не производилось ограничение рывков во время пуска, данный
вариант регулируемого электропривод ограничивает ускорения и производную
ускорения во время пуска. В проекте применена замкнутая система автоматического
регулирования скорости, которая исключает появление ударов момента при пуске и
переключениях электродвигателя, что в свою очередь практически исключает
вибрацию.
·
Для
снижения вибрации, при превышении предельно-допустимых норм, до приемлемых
значений используется виброизоляция, т.е. упругие элементы размещаются между
вибрирующих элементов. Эффективным способом борьбы с вредной вибрацией является
пассивная виброизоляция - установка резиновых прокладок под опоры лебедки.
6.2.5
Микроклимат
Микроклиматические условия производственной
среды - сочетание температуры, давления, относительной влажности, скорости
движения воздуха. Эти параметры оказывают большое влияние на функциональную
деятельность человека, его самочувствие, здоровье и на надежность работы средств
вычислительной техники.
ГОСТ 12.1.005-88 "Общие
санитарно-гигиенические требования к воздуху рабочей зоны" устанавливает
ПДК вредных веществ в воздухе рабочей зоны. Концентрации, которые при
ежедневной (кроме выходных дней) работе в течение 8 ч или при другой
продолжительности, но не более 41 ч в неделю, в течение всего рабочего стажа не
могут вызвать заболеваний или отклонений в состоянии здоровья, обнаруживаемых
современными методами исследований в процессе работы или в отдаленные сроки
жизни настоящего и последующего поколений.
В таблице 6.2 приведены нормы микроклиматических
условий и фактические данные. Нормативные значения показателей взяты из таких
документов, как Р2.2.775-99, СанПиН 2.2.4.548-96, СНиП 23-05-95, СанПиН
2.2.2/2.4.1340-03.
Таблица 6.2 Показатели микроклимата в рабочей
зоне (факт/план)
|
Профессия
|
Категория
тяжести работы
|
Показатели
условий труда в рабочей зоне, факт/норма
|
Освещенность,
лк
|
Вредные
вещества на рабочем месте
|
|
|
Температура,
°C
|
Относительная
влажность, %
|
Скорость
воздуха, м/с
|
Теплоизлучение,
Вт/м2
|
|
|
|
|
Холодный
период
|
Теплый
период
|
Холодный
период
|
Теплый
период
|
Холодный
период
|
Теплый
период
|
|
|
|
|
Наладчик
крана (механик)
|
Средней
тяжести - IIa (энергозатраты от 151 до 200 ккал/ч)
|
18-19/
18-20
|
22/
21-23
|
40-60/
40-60
|
40-60/
40-60
|
0,2/
0,2
|
0,2/
0,3
|
Незначительное
излучение от электродвигателей
|
50/30
|
Отсутствуют
вредные выбросы
|
|
Наладчик
крана (электромонтер)
|
|
18-19/
18-20
|
22/
21-23
|
40-60/
40-60
|
40-60/
40-60
|
0,2/
0,2
|
0,2/
0,3
|
|
50/30
|
|
|
Профессия
|
Концентрация
вредного вещества, мг/м3
|
Энергетическое
воздействие на среду
|
Уровень
энергетического воздействия
|
Площадь,
приходящаяся на одного работающего, м2
|
Объем
помещения, приходящегося на одного работающего, м3
|
Класс
условий труда/степень риска получения травмы
|
Примечание
|
|
Наладчик
крана (механик)
|
Отсутствуют
вредные выбросы
|
Излучение
от электродвигателя
|
Незначи-тельное
|
42
|
|
2(Допустимый-)/0
|
|
|
Наладчик
крана (электромонтер)
|
|
|
|
42
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6.3 Электробезопасность
Электробезопасность - система
организационно-технических мероприятий и средств, обеспечивающих защиту людей
от вредного и опасного воздействия электрического тока, электрической дуги,
электромагнитного поля и статического электричества.
Действие электрического тока на живую ткань
носит разносторонний и своеобразный характер. Проходя через организм человека,
электроток производит следующие действия:
термическое;
электролитическое;
механическое;
биологическое.
Термическое действие тока проявляется ожогами
отдельных участков тела, нагревом органов, расположенных на пути тока, вызывая
в них функциональные расстройства.
Электролитическое действие тока выражается в
разложении органической жидкости, в том числе крови, в нарушении ее
физико-химического состава. Механическое действие тока приводит к расслоению,
разрыву тканей организма в результате электродинамического эффекта, а также
мгновенного взрывоподобного образования пара из тканевой жидкости и крови.
Биологическое действие тока проявляется раздражением и возбуждением живых
тканей организма, а также нарушением внутренних биологических процессов. Исход
поражения человека электротоком зависит от многих факторов: силы тока, времени
его прохождения через организм, характеристики тока (переменный или
постоянный), пути тока в теле человека, при переменном токе - от частоты
колебаний. Значения предельно допустимого тока представлены в таблице 6.3.
Таблица 6.3 Предельно допустимые значения тока
|
Род
тока
|
Нормируемая
величина
|
Предельно
допустимые значения, не более, при продолжительности воздействия тока t, с
|
|
|
0,1
|
0,2
|
0,3
|
0,4
|
0,5
|
0,6
|
0,7
|
0,8
|
0,9
|
1,0
|
Св.1,0
|
|
Переменный50
Гц
|
U,
B
|
340
|
160
|
135
|
105
|
95
|
85
|
75
|
70
|
60
|
20
|
|
I,
мА
|
400
|
190
|
160
|
140
|
125
|
105
|
90
|
75
|
65
|
50
|
6
|
|
Переменный
400 Гц
|
U,
B
|
500
|
500
|
330
|
250
|
200
|
170
|
140
|
130
|
110
|
100
|
36
|
|
I,
мА
|
|
|
|
|
|
|
|
|
|
|
8
|
|
Постоянный
|
U,
B
|
500
|
400
|
350
|
300
|
250
|
240
|
230
|
220
|
210
|
200
|
40
|
|
I,
мА
|
|
|
|
|
|
|
|
|
|
|
15
|
|
Выпрямленный
двухполупериодный
|
Uампл,
B
|
500
|
400
|
300
|
270
|
230
|
220
|
210
|
200
|
190
|
180
|
-
|
|
Iампл,
мА
|
|
|
|
|
|
|
|
|
|
|
|
|
Выпрямленный
однополупериодный
|
Uампл,
B
|
500
|
400
|
300
|
250
|
200
|
190
|
180
|
170
|
160
|
150
|
-
|
|
Iампл,
мА
|
|
|
|
|
|
|
|
|
|
|
|
Переменный ток опаснее постоянного, однако, при
высоких напряжениях (более 500 В) опаснее постоянный ток. Из возможных путей
протекания тока через тело человека (голова-рука, голова-ноги, рука-рука,
нога-рука, нога-нога и т.п.) наиболее опасен тот, при котором поражается
головной мозг (голова-руки, голова-ноги), сердце и легкие (руки-ноги).
Неблагоприятный микроклимат (повышенная температура, влажность) увеличивает
опасность поражения током, так как влага (пот) понижает сопротивление кожных
покровов
Привод механизма крана осуществляется от
электродвигателя, питание которого осуществляется от сети переменного тока
напряжением 220 В.
Причины поражения заключаются в основном в
нарушении правил защиты людей от поражения и неисправности электрооборудования
(в основном это нарушение заземления). Особо опасное помещение по поражению
электрическим током.
Согласно ПУЭ (правила устройства
электроустановок) принято, что напряжение силовых электрических цепей в
машинных помещениях не выше 660 В, в производственных помещениях - не выше 380
В, а для цепей управления, освещения и сигнализации во всех помещениях - не
выше 220 В. Электропроводка выполнена изолированными проводами. Кабели и шланги
токопровода размещены и укреплены таким образом, чтобы при движении тележки
исключалась возможность их зацепления за находящиеся в цехе конструкции и их
механического повреждения. Сечение жил кабелей и проводов не менее 1,5 мм для
медных жил и 2,5 мм для алюминиевых жил. Для защиты электродвигателя крана от
короткого замыкания применены автоматические выключатели с электромагнитными и
тепловыми расцепителями. Цепи управления, освещения и сигнализации крана имеют
защиту от коротких замыканий.
Расчёт заземления
Расчет защитного заземления выполняется в
соответствии с ГОСТ 12.1.030-81 "Электробезопасность. Защитное заземление,
зануление". Норма на сопротивление заземляющего устройства для сети
напряжением до 1000В принимается R ≤ 4 Ом. Заземлитель выполнен в виде
вертикальных труб, погруженных в грунт и соединенных между собой стальной
полосой.
Сопротивление одного вертикального трубчатого
заземлителя определяется по формуле:

где Ргрунта - удельное электрическое
сопротивление грунта, Ргрунта = 120 Ом∙м, d - диаметр трубы, d
= 0,05 м
Н - глубина заложения трубы, Н = 1,7 м
Сопротивление полосы, соединяющей трубы:

Где lп
- длина полосы, lп=2
м
H0
- ширина полосы, H0=0,6
м
b
-
толщина полосы, b=0,05 м
Сопротивление заземляющего контура:

Где n
- количество вертикальных заземлителей, n=20
шт.
h1
- коэффициент, учитывающий экранирование вертикальных заземлителей
h1=0,68
h2
- коэффициент, учитывающий экранирование вертикальных и продольных
заземлителей, h2=0,57

Сопротивление такой величины удовлетворяет
требованиям, предъявляемым к заземлениями электроустановки.
Обеспечение безопасности труда
В качестве приводных двигателей для всех
механизмов крана используют двигатели, специально предназначенные для данных
условий работы.
Это двигатели серии "Д" (краново -
металлургические) и серии "П" (общепромышленные). Они рассчитаны на
эксплуатацию в условиях повышенной температуры окружающий среды, влажности.
В установке двигателей и их эксплуатации
предъявляются следующие требования:
· двигатели должны быть ограждены
перилами высотой не менее 1м;
· двигатели устанавливаются таким
образом, чтобы они были доступны осмотра и ремонта;
· перед вводом в эксплуатацию должны
быть проведены приёмно-сдаточные испытания двигателей в соответствии с ПУЭ;
· проверка сопротивления изоляции
производится мегомметром на напряжение 500В, 1000В (изоляция считается
удовлетворительной, если её сопротивление превышает 5 МОм);
· проверяется работа двигателя на
холостом ходу в течение часа.
· производятся испытания изоляции
напряжением повышенной частоты в течение 1мин;
· с периодичностью не реже одного раза
в год и после ремонта электродвигателей их рекомендуется подвергать
профилактическим испытаниям в следующем объёме: измерение сопротивления
изоляции, испытание повышенным напряжением (изоляции), проверка состояния
коллекторных пластин и щёток;
· для обеспечения безопасности людей,
обслуживающих электродвигатели, корпуса последних должны быть заземлены (сопротивление
заземления не более 4 Ом);
· в системах автоматического
управления электроприводами предусмотрены следующие мероприятия: защита от
развития аварийных процессов при исчезновении напряжения собственных нужд;
защита при исчезновения силового напряжения; автоматическое защитное отключение
преобразователя при коротких замыканиях в цепи нагрузки и при значительных
перегрузках двигателей; защитное отключение при нарушении изоляции элементов
силовой цепи;
· для обеспечения эксплуатации и
поиска неисправностей, электроприводы должны быть снабжены аварийной и
предупредительной сигнализацией;
· необходимо наличие пожарной
сигнализации;
· оборудование, находящиеся в
непосредственной близости с постом управления, должно быть снабжено
углекислотными огнетушителем типа ОУ -2,
· необходимо наличие свободных путей
эвакуации рабочего персонала.
В цехе должны обеспечиваться метеорологические
условия и воздушная среда, соответствующие гигиеническим требованиям. Для этих
целей предусматривается вентиляция. Оборудование цеха работает автоматически и
требует вмешательство человека только во время ремонтов и профилактических
осмотров. В связи с этим постоянные рабочие места в цехе отсутствуют. Поэтому,
требования к микроклимату цеха предъявляются менее жесткие, чем при наличии
постоянных рабочих мест.
Основным видом вентиляции в цехах является
аэрация. Она обеспечивает соответствие состояния воздуха требованиям норм
документов (СНиП 245 - 71 и ГОСТ 121005 - 88).
Аэрация - это организованная, управляемая
естественная вентиляция, осуществляемая за счёт разности температур внутри
здания (цеха) и снаружи (на улице) и действия ветра. Необходимый воздухообмен в
здании осуществляется за счёт устройства открывающихся отверстий определённой
площади. Снаружи через эти отверстия поступает, обычно, холодный воздух извне,
а тёплый выходит через вытяжные фонари на крыше здания. В цехе всегда
температура выше, чем снаружи (это обусловлено технологическим процессом).
Для наблюдения за технологическим процессом и
работой оборудования в цехе предусмотрена кабина с пультом управления. В ней
сосредоточена важнейшая производственная информация. Работа оператора требует
повышенного внимания, быстроты реакции. Он должен принимать оптимальные
решения. В связи с этим условия работы оператора должны быть наиболее
благоприятные. Поэтому, в кабине управления предусмотрено комфортное
кондиционирование, с помощью которого поддерживаются определённые параметры
воздушной среды:
температура окружающего воздуха (20-23)°С;
относительная влажность воздуха (30-60)%;
скорость движения воздуха (0,2-0,5)м/с.
В состав кондиционирования входят: оборудование
для обработки воздуха, его перемещения и распределения; источники тепло - и
хладоснабжения; средства автоматического регулирования.
В связи с этим система кондиционирования
является самым дорогим способом вентиляции. Но, несмотря на её высокую
стоимость, применение такой системы в кабине оператора экономически оправдано,
т.к. работа оператора в не отвечающих требованиям условиях принесёт больший
ущерб, чем затраты на установку кондиционера.
Риск
Риск - это вероятность
наступления нежелательного события или количественная оценка опасности. Уровень
травматизма можно рассчитать по формуле:
 ,
,
где R - риск,- число несчастных
случаев на предприятии за год,- число работников на предприятии.
Для рассматриваемого проекта
примем Сn=0; Np=4
R=0/4=0.
Считается, что приемлемый
уровень риска в России составляет Rпр=1*10-4. Таким образом, уровень
травматизма не превышает норму.
Уровень заболеваемости 63%, из
которых 52% приходится на ОРВИ.
Считается, что уровень 200-400%
является приемлемым, что свидетельствует о благоприятной
санитарно-эпидемиологической ситуации на предприятии.
Интенсивность труда
Интенсивность труда имеет значение соответствующее
нормальной средней интенсивности, и не требует соответствующего учета в оплате
труда.
.4 Чрезвычайные
ситуации
Чрезвычайная ситуация - это обстановка на
определенной территории или акватории, сложившаяся в результате аварии,
катастрофы, стихийного или иного бедствия, которая может повлечь или повлекла
за собой человеческие жертвы, ущерб здоровью людей или окружающей среде,
значительные материальные потери.
· Способы защиты персонала от
сейсмической активности:
· повышение качества проектирования
объектов для сейсмологических зон с учетом СНиП II-7-81* "Строительство в
сейсмических районах" и СНиП-2.01.51-90 "Инженерно-технические
мероприятия гражданской обороны";
· ведение в сейсмических зонах
сейсмостойкого строительства, повышение качества строительства, соблюдение
строительных норм и правил, исключение брака;
· выявления их сейсмостойкости и
соответствия сейсмичности площадок, на которых размещены эти объекты;
· проведение специальных работ по
повышению сейсмостойкости (укреплению) зданий и сооружений, разборке
(демонтажу) недостаточно стойких строений и конструкций; проведение учебных
мероприятий.
· Радиационная защита:
· Эвакуация населения
· Создание защищенных от радиации
убежищ
· Приобретение средств радиационной
защиты
· Обучение персонала пользованию
средствами противорадиационной защиты
· Проведение периодических учений
персонала
· Защита при грозе:
· Для уменьшения вероятности поражения
молнией тело человека должно иметь как можно меньше контактов с землей.
Наиболее безопасной позой считается следующая: присесть, ступни поставить
вместе, опустить голову и грудь на колени и предплечья, руками обхватить
колени.
· Можно сесть или встать на
изоляционный материал: бревно, доску, камень, палатку, спальный мешок, веревку,
рюкзак.
· Не нужно располагаться во время
грозы рядом с железобетонным полотном, у водоема, у высотного объекта без
молниеотвода.
· Не нужно касаться головой, спиной
или другими частями тела поверхности скал, стволов деревьев, металлических
конструкций.
· В зоне относительной безопасности
нужно занять сухое место на расстоянии 1,5 −2 метра от высоких объектов:
дерево, скал, опор ЛЭП.
· Не нужно находиться рядом с
включенными электроприборами, проводкой, металлическими предметами, не нужно
касаться их руками, не нужно располагаться вблизи молниезащитного заземления.
· Участки земли, куда попала молния,
или переждите несколько минут, нужно обходить, когда электричество рассеется.
· Во время грозы нужно стараться
сохранять одежду и тело сухой.
· Незамедлительно нужно вызвать
пожарных и спасателей в случае возникновения пожара от удара молнии,
постарайтесь ликвидировать его своими силами.
· Необходимо помощь пострадавшим.
· Большинство чрезвычайных ситуаций
возникают по следующим причинам:
· из-за технических неполадок в
оборудовании (основная причина),
· из-за халатных действий наладчиков и
операторов.
· Возможные аварийные ситуации,
которые могут инициировать чрезвычайную ситуацию с краном: столкновение с
элементами конструкций из-за ошибки оператора крана, пожар.
Таблица 6.4.1
|
Наименование
ЧС
|
Условия
возникновения аварийной ситуации
|
Возможное
развитие последствий
|
Способы
и средства предотвращения аварий
|
Меры
локализации аварий
|
|
Столкновение
крана со стеллажом
|
Нарушение
правил эксплуатации крана а
|
Падение
груза на человека
|
Устройство,
размыкающее цепь безопасности
|
Остановка
крана а
|
|
Пожар
|
Срабатывание
пожарной сигнализации
|
Задымление
и возгорание крана
|
Устройство
пожарной безопасности
|
Остановка
крана а.
|
Пожаробезопасность
Пожарная безопасность - состояние объекта, при
котором с регламентируемой вероятностью исключается возможность возникновения и
развития пожара и воздействия на людей опасных факторов пожара, а также
обеспечивается защита материальных ценностей.
По СНиП 2.01.02-85 (противопожарные нормы)
огнестойкость здания соответствует IΙ степени
(здания с несущими и ограждающими конструкциями из естественных или
искусственных каменных материалов, бетона или железобетона с применением
листовых и плитных негорючих материалов; в покрытиях зданий допускается
применять незащищенные стальные конструкции).
Огнестойкость - свойство сопротивляемости
воздействию пожара и распространению его опасных факторов.
Категория В (пожароопасная) Горючие и
трудногорючие жидкости, твердые горючие и трудногорючие вещества и материалы (в
том числе волокна и пыль), вещества и материалы, способные при взаимодействии с
водой, кислородом воздуха или друг с другом гореть при условии, что помещения,
в которых они имеются или обращаются, не относятся к категориям А или Б. В
соответствии с правилами пожарной безопасности в РФ (ППБ 01-03) для локализации
возгорания в рабочей зоне применяются пожарные гидранты, углекислотный
огнетушитель, установленный в пожарном шкафу, в котором установлен кран ,
оборудовано аналоговой адресной пожарной сигнализацией состоящей из главной панели,
дымовых и тепловых извещателей, ручных пожарных извещателей с разбиваемым
стеклом. На кране применяется оборудование системы пожарной сигнализации,
посредством которого обеспечивается подача электропитания на пожарные
извещатели и которое:
· используется для получения заданного
сигнала и подачи сигнала о пожаре;
· передает сигнал об обнаружении
пожара через соответствующее оборудование в пожарные организации и систему
автоматического пожаротушения;
· используется для автоматического
мониторинга надлежащего функционирования системы.
Схема взаимодействия системы пожарной
сигнализации и крановой системы приведена на рисунке 6.4.2

Рис. 6.4.2 Подключение системы пожарной
сигнализации
6.5 Эргономика
В соответствии с ГОСТ 12.2.061 - 81:
Повышение производительности труда крановщика,
которая во многом определяет производительность крана, достигается улучшением
условий работы человека. Поэтому при создании крана определенное внимание
должно уделяться нормам эргономики, т. е. взаимоотношениям человека с
механизмом, определенным с учетом физических и психологических факторов
человека. Основными нормами эргономики являются параметры окружающей среды -
климат, уровень шума, запыленность, освещенность и параметры обслуживания -
видимость, механические колебания, конструкция и форма средств обслуживания и
другие факторы, относящиеся к устройству рабочего места крановщика.
Понятие видимость характеризует расстояние, на
котором можно четко видеть человеку с нормальным зрением. Видимость из кабины
крана определяется расположением сиденья крановщика, конструкцией окон кабины и
ее расположением на кране. Необходимость попеременной концентрации внимания то
на рабочей зоне и крюковой подвеске, то на органах управления требует хорошей
обзорности. Особенно важны углы зрения; они определяются величиной и
конструкцией окон кабины с учетом угла зрения глаз крановщика.
Кабина водителя имеет достаточные размеры для
удобного расположения рабочего места и аппаратуры. Лобовое стекло выполнено
наклонным, чтобы световое отражение не искажало видимость пути. В кабине
установлены козырьковые щитки для защиты глаз водителя от солнечных лучей
. Центры рукоятей управления краном в нулевом
положении органов управления должны находиться и зонах 1 - 3, указанных
на чертеже.
В зоне 1 должны находиться основные рукояти
управления механизмами крана (механизма подъема груза, механизмов передвижения
грузовой тележки и крана).
В зоне 2 должны находиться дополнительные
рукояти управления при частом их использовании (в частности, рукояти управления
грейфером).
В зоне 3 должны находиться
вспомогательные рукояти управления редкого использования для кранов с большим
числом механизмов. Приводные элементы кнопочного управления краном должны быть
расположены в зоне 4 с началом на ребре А (см. чертеж).
1. Угол
бокового отклонения каната от плоскости ручья блока или направления навивки на
барабан не должен превышать 4° для любого положения грузонесущего органа. Для
уравнительных блоков этот угол не должен превышать 1,5°.
2. При
расположении уравнительных блоков в плоскости, перпендикулярной к плоскости
блоков грузового полиспаста, должно быть предусмотрено шарнирное подвешивание
уравнительных блоков.
3. Зазор
между ребордами блока и ограждением должен быть не более 20 % диаметра каната.
4. Твердость
поверхности ручья блоков крана групп режима 6К, 7К должна быть не менее 320 НВ,
глубина закаленного слоя - не менее 2
5. Центры
рукоятей управления в крайнем положении контроллера и приводные элементы
кнопочного управления краном должны располагаться в одной горизонтальной
плоскости на расстоянии 120 мм вверх от точки R.
Точку
R
определяют
в соответствии с требованиями ГОСТ 20304.
6. Максимальное
перемещение рукояти управления по горизонтали от "нулевого" положения
не более 140 мм и по вертикали не более 60 мм. Максимальное усилие перемещения
рукояти - не более 30 Н.
7. Сигнальные
кнопки и аварийные выключатели должны располагаться в горизонтальной плоскости
на расстоянии 20 - 80 мм вверх от точки R.
В разработанной технологии предусмотрена защита
от шума, вибрации применяются специальные двигатели, заземления, в системе управления
предусмотрено аварийное отключение, применяются вентиляция и кондиционирование
в кабине управления, есть искусственное освещение. Таким образом рабочее место
оператора и оборудование соответствует санитарным нормам и требованиям согласно
ГОСТам и СНиП.
Предусмотренные в данном проекте, условия труда,
не имеют отклонении от норм.
) Государство регулирует безопасность
жизнедеятельности и труда человека. Основные нормы и правила прописаны в
Конституции РФ, ТК РФ, и ССБТ.
) Для обеспечения безопасности
пользования краном, доступ посторонних к оборудованию не допускается,
предусмотрены ограждения, предупреждающие знаки и запирающие механизмы (ГОСТ
12.2.061-81, ГОСТ 12.4.026-076).
) Определены: тяжесть труда (средняя
тяжесть - IIa (энергозатраты от 151 до 200 ккал/ч), в соответствии с СанПиН
2.2.4.548-96; класс труда (2-Допустимый), в соответствии с пособием к СНиП
11-01-95 по разработке раздела проектной документации "Организация и
условия труда работников. Управление производством и предприятием". Примерно
рассчитаны риски.
) Микроклимат и освещенность
соответствуют норме. В помещении предусмотрена вентиляция и отопление в
холодное время года, обеспечивающая температурно-влажностный режим (СанПиН
2.2.4.548-96)
) Для нейтрализации действия вредных
виброакустических факторов предусмотрены шумоизоляционные материалы, резиновые
про кладки (для уменьшения вибрации) (ГОСТ 12.1.012-90, СНиП 23-03-2003).
) К опасным факторам в помещении можно
отнести лишь возможное поражение электрическим током, связанное с неправильной
эксплуатацией электроприборов.
) Класс опасности помещения "Без
повышенной опасности"). В помещении проведено заземление (ГОСТ
12.1.030-81).
) Огнестойкость здания соответствует 2ой
степени. Помещение является пожароопасным (категория б) В помещении
присутствует огнетушитель, пожарная сигнализации. причиной пожара может
являться замыкание проводки, неправильная эксплуатация электроприборов. При
возникновении пожара созданы все условия для его успешной ликвидации. (СНиП
2.11.01-85, НАПБ Б.03.002-2007, ППБ 01-03).
Описаны способы защиты персонала в случае ЧС, на
предприятии проводятся регулярные учения и тренировки.
7. Природопользование и охрана окружающей среды
.1 Природопользавание
Проблема защиты окружающей среды встала перед
человечеством сравнительно недавно. В наше время происходит огромное количество
вредных выбросов в атмосферу и океан, уничтожение лесов. Все это значительно
приближает мир к самоуничтожению. Озоновые дыры, потепление климата, вымирание
многих видов животных наглядно свидетельствует о том, что наша среда обитания
истощена до предела. От дальнейшей активности людей будет зависеть жизнь
планеты и ее обитателей.
Природопользование может быть рациональным
(разумным) и нерациональным. При рациональном природопользовании, обеспечивающем
экономически эффективное потребление и воспроизводство природных ресурсов,
создаются возможности для удовлетворения потребностей в них не только
настоящего, но и будущих поколений людей. К сожалению, нынешнее состояние
природопользования в целом можно охарактеризовать как нерациональное, ведущее к
истощению природных ресурсов, нарушению экологического равновесия и загрязнению
окружающей среды. В основе природопользования должны лежать законы экологии.
Нарушение экологических требований ведет к ухудшению природной среды и вызывает
необходимость проведения специальных природоохранных мероприятий.
Под термином "охрана окружающей среды"
понимаются все экономические, правовые, социально - политические и
организационно - хозяйственные механизмы, которые подводят окружающую среду к
"пределу прочности". Но нельзя же ждать пока загрязнение не достигнет
высшей степени. Нужно предотвратить угрозу уничтожения мира. Охрана окружающей
среды и рациональное использование природных ресурсов представляет собой
сложную и многоплановую проблему. Решение ее сопряжено с регулированием
взаимоотношений человека и природы, подчинением их определенной системе
законоположений, инструкций и правил. В нашей стране такая система установлена
в законодательном порядке.
Правовая охрана природы представляет собой
совокупность установленных государством правовых норм и возникающих в
результате их реализации правоотношений, направленных на выполнение мероприятий
по сохранению естественной среды, рациональному использованию природных ресурсов,
оздоровлению окружающей человека жизненной среды в интересах настоящего и
будущих поколений. Это система государственных мероприятий, закрепленных в
праве и направленных на сохранение, восстановление и улучшение условий,
необходимых для жизни людей и развития материального производства.
В систему правовой охраны природы России входят
четыре группы юридических мероприятий.
· Правовое регулирование отношений по
использованию, сохранению и возобновлению природных ресурсов.
· Организация воспитания и обучения
кадров, финансирование и материально-техническое обеспечение природоохранных
действий.
· Государственный и общественный
контроль за выполнением требований охраны природы.
· Юридическая ответственность
правонарушителей.
В соответствии с экологическим законодательством
объектом правовой охраны выступает природная среда - объективная, существующая
вне человека и независимо от его сознания реальность, служащая местом обитания,
условием и средством его существования.
Имеется большое количество законоположений, определяющих
правовое регулирование природоохранных отношений. Совокупность природоохранных
норм и правовых актов, объединенных общностью объекта, предметов, принципов и
целей правовой охраны, в России образует природоохранное (экологическое)
законодательство.
Источниками экологического права признаются
нормативно-правовые акты, в которых содержатся правовые нормы, регулирующие
правовые отношения. К ним относятся законы, указы, постановления и
распоряжения, нормативные акты министерств и ведомств, законы и нормативно-правовые
акты субъектов Российской Федерации.
В данной дипломной работе проводится выбор типа
электропривода, двигателя и силового преобразователя, а также разработка
системы автоматического управления. При правильной эксплуатации электроприводов
не происходит выделение вредных веществ, как в атмосферу, так и в почву и воду.
Однако электроприводы используются не как таковые, а в совокупности с
технологическим оборудованием.
При эксплуатации оборудования используются
различные смазочные материалы такие как: литол-м, жидкие смазки и др. При
техническом обслуживании заменяется смазка в редукторах. Oтpаботанные материалы
своевременно утилизируются. Также основными средствами загрязнения являются
шум, электромагнитное излучение и тепло, выделяемое двигателем.
Согласно МГСН 2.2.4/2.1.8562-96. Шум крана
подразделяется на структурный и ударный. Структурный источник шума создается от
механического воздействия и слышен даже на значительном удалении от источника,
когда создается вибрация, вызванная работой крана. Ударный шум создается от
непосредственного контакта предмета о предмет, в случае с краном это механизм
захвата. Уровень шума, выделяемого краном при движении, составляет 35-42 дБ,
что не превышает значения 55 дБ согласно ГОСТ 12.2.036-81.
Электромагнитное излучение попадает в жилые и
офисные комнаты через стены шахты и негативно воздействует на биополе людей,
что в свою очередь приводит к повышению вероятности возникновения заболеваний.
Требования устойчивости к электромагнитным
помехам кранов установлены ГОСТ Р 53362-2009 "Совместимость технических
средств электромагнитная. Системы бесперебойного питания. Требования и методы
испытаний".
В соответствии с ГОСТ 12.4.021-75. Тепло,
выделяемое двигателем, незначительно и быстро рассеивается в воздухе, не оказывая
вредного влияния на операторов и наладчиков. Значение температуры окружающей
среды на кране находится в пределах стандарта микроклимата для производственных
помещений.
При выводе оборудования из эксплуатации оно
подлежи утилизации в соответствии с инструкциями.
Оборудование, применённое в данной технологии,
экологически чистое, так как оно использует экологически чистое топливо -
электроэнергию. В атмосферу не выбрасываются отходы производства.
Проведя экологическую экспертизу технических
условий на нажимном устройстве прокатного стана горячей прокатки в соответствии
с ГОСТ 12.1.003 - 74 ССБТ "Опасные и вредные производственные
факторы", ГОСТ 12.1.007 -76 "Вредные вещества", ГОСТ 12.1.005 88
"Общие санитарно гигиенические требования к воздуху рабочей зоны",
ГОСТ 12.1.003 - 83 "Шум. Общие требования безопасности" и др., можно
заключить, что загрязнение природной среды отходами, шумом, излучениями и т.д.
находится в пределах допустимых санитарных норм и процесс считается
экологически безопасным.
Прокатные цеха желательно располагать с
подветренной стороны жилого массива, чтобы дымоотходы производства не
загрязняли жилой район, т.к. завод расположен в жилой зоне.
Работа выполнена в соответствии с действующими
ГОСТами, СНиПами и нормативными документами. Применение эффективных средств
защиты обеспечивает полную нейтрализацию вредных воздействий на природную
среду. Гарантированы нормальные условия труда и безопасность производства.
В данном разделе при оценке влияния
деятельности предприятия на окружающую среду рассмотрены следующие вопросы:
- определен перечень
отходов производства;
- определена
категория опасности производства.
Параметры влияния производства на
окружающую среду регламентированы:
. ГН 2.1.6.1338-03.
Предельно-допустимые концентрации (ПДК) загрязняющих веществ в атмосферном
воздухе населенных мест.
. ГОСТ 17.2.3.02-78. Охрана
природа. Атмосфера. Правила установления допустимых выбросов вредных веществ
промышленными предприятиями;
. Федеральный закон №89-фз от
24.06.1998 "Об отходах производства и потребления".
Показатели состояния охраны природы
на предприятии:
. Фактическая величина
выбросов загрязняющих веществ в атмосферу не превышает нормируемых значений;
. За счет создания замкнутого
цикла водоснабжения предприятия, снижено загрязнение водного бассейна.
В соответствии с требованиями
Федерального закона №7-фз от 10.01.2002г. "Об охране окружающей
среды" на предприятии функционирует служба мониторинга, осуществляющая
производственный экологический контроль.
Проведение специальных мер не требуется.
Заключение
В работе рассмотрено проектирование
электропривода главного подъёма мостового крана.
Был выбран асинхронный двигатель и
преобразователь частоты фирмы SIEMENS.
Схема автоматики реализована на контролере SIMATIC
S7-300
Была рассмотрена безопасность и экологичность
проекта, а также технико-экономическое обоснование проекта.
Электропривод крана и рабочее
место проходят по всем нормам и отвечают требованиям безопасности.
Библиографический список
1. Автоматизированный
электропривод переменного тока. Эпштейн И. И.- М: Энергоиздат, 1982. - 192 с.
. ГОСТ 12.1.003-88 ССБТ. Шум.
Общие требования безопасности.
. ГОСТ 12.1.012-90 ССБТ.
Вибробезопасность.
. ГОСТ 12.1.019-79 ССБТ.
Электробезопасность. Общие требования.
. ГОСТ 12.1.029-80 ССБТ.
Средства и методы защиты от шума.
. ГОСТ 12.1.033-81 ССБТ.
Пожарная безопасность
. Математическое
моделирование электроприводов переменного тока с полупроводниковыми
преобразователями частоты Шрейнер Р.Т. Системы подчиненного регулирования
электроприводов:
. Оптимальное частотное
управления асинхронным электроприводом: Учебник/ Под ред. Р.Т.Шрейнер, Ю.А.
Дмитренко. Кишинев "Штиница", 1982 225 с.
. Охрана труда в
машиностроении: Учебник/ Под ред. Е.Я.Юдина и С.В.Белова. М.: Машиностроение,
1983. 432 с.
. Силовые полупроводниковые
преобразователи в металлургии: Справочник/С.Р.Резинский, Б.И.Мошкович,
И.Х.Евзеров, М.М.Внеделанд. М.: Металлургия, 1976. 184 с.; ил.
. Справочник по кранам
Александров М.П. Л Машиностроение,1988г
. Справочник по расчётам
механизмов подъёмно-транспортных машин / А.В.Кузьмин Ф.Л.Марон Высшая школа
1983.
. Справочник по электрическим
машинам. Том2/ И.П.Копылов, Б.К.Клоков-М.:Энергоатомиздат, 1989.- 688 с.
. Теория электропривода:
Учеб.пособие / Б.И.Фираго, Л.Б. Павльчик. Минск: ЗАО "Техноперспектива",2004.-
527с.
. Электромагнитные и
электромеханические процессы в частотно - регулируемых асинхронных
электроприводах. Поздеев А.Д Чебоксары, 1998. 172 с.
. Энергосберегающий
асинхронный электропривод: Учеб. пособие для студ. высш. учеб. заведений / И.Я.
Браславский, 3. Ш. Ишматов, В. Н. Поляков; Под ред. И. Я. Браславского. - М.:
Издательский центр "Академия", 2004. - 256 с.