Численные решения задач устойчивости прямого стержня с при осевом сжатии с кручением
Содержание
Введение
Глава
1. Непротиворечивый вариант геометрически нелинейной теории плоских
криволинейных стержней в квадратичном приближении
.1
Кинематические соотношения
.2
Геометрически нелинейные уравнения равновесия
.3
Линеаризованные уравнения нейтрального равновесия
Глава
2. Численные решения задач устойчивости прямого стержня с при осевом сжатии с
кручением
.1
Постановка задачи
.2
Алгоритм численного решения задачи
.3
Численные результаты решения уравнений и их анализ
Глава
3. Численные решения задач устойчивости плоского криволинейного стержня
.1
Постановка задачи
3.2
Алгоритм численного решения задачи НДС плоского криволинейного стержня при 
.3
Алгоритм численного решения задачи НДС плоского
криволинейного
стержня при 
.4
Алгоритм численного решения задачи устойчивости плоского криволинейного стержня
Глава
4. Проверка и анализ результатов, полученных численным решением задач НДС и
устойчивости плоских криволинейных стержней
.1
Проверка алгоритма решения задач НДС
.2
Решения задач устойчивости криволинейного плоского стержня (арки)
Глава
5. Безопасность и экологичность проекта
.1
Электробезопасность
.2
Пожарная безопасность
.3
Построение дерева отказов
.4
Требования к уровням шума и вибрации
.5
Пыль и вредные химические вещества
.6
Микроклимат
.7
Эргономические принципы при создании ПО АСУ
.8
Эргономические требования к системам отображения информации
.9
Описание зрительной работы оператора
.10
Эргономическое обеспечение рабочего места оператора ЭВМ
.11
Освещение производственных помещений ВЦ
.12
Электромагнитное воздействие
.13
Методы защиты от электромагнитных полей
.14
Охрана окружающей среды
.15
Расчёт коэффициента безвредности
Глава
6. Расчёт затрат и цены на разработку программы
.1
Расчёт затрат на оплату труда инженера-программиста
.2
Расчёт затрат на оплату труда научного руководителя
.3
Расчёт затрат на машинное время
.4
Расчёт отчислений на единый социальный налог
.5
Расчёт накладных расходов
Литература
Приложение
численный задача стержень
устойчивость
Введение
Исследования в области теории устойчивости
стержней, как известно, берут свое начало еще с работ Л.Эйлера. Казалось бы, к
настоящему времени все давно известной детально изучено. Необходимость
проведения дальнейших и более глубоких исследований выявилась практически
недавно и связана с результатами, которые были изложены в работах [1-4]. В
первой из этих работ было показано, что при малых деформациях использование
известных соотношений нелинейной теории упругости в квадратичном приближении,
считающихся на сегодняшний день абсолютно корректными, при некоторых видах
нагружения приводят к появлению "ложных" бифуркационных решений. В
связи с этим для случая малых деформаций и произвольных перемещений в работах
[1,2] был построен непротиворечивый вариант геометрически нелинейных уравнений
теории упругости, а также рассмотрены простейшие примеры его применения,
связанные с редукцией двумерной нелинейной задачи деформирования полосы в виде
стержня к одномерным уравнениям и последующим их использованием для выявления
возможных форм потери устойчивости (ФПУ) при характерных видах их нагружения.
Полученные результаты оказались принципиально новыми, которые потребовали
проведения определенной ревизии всех вариантов нелинейной теории стержней при
произвольных перемещениях, известных к настоящему времени, а также разработки
таких ее вариантов, использование которых позволило бы выявить и корректно
исследовать все возможные известные и неизвестные ФПУ стержней.
В связи с этим для прямолинейных ортотропных
упругих стержней, подверженных действию консервативных внешних сил, на основе
использования модели Тимошенко в работах [3,4] была проведена редукция
построенных ранее [1,2] непротиворечивых трехмерных линеаризованных уравнений
теории упругости к одномерным уравнениям. На основе выведенных уравнений с
целью анализа их содержательности был сформулирован ряд новых неклассических
задач устойчивости стержней и найдены их точные аналитические решения для
различных случаев закрепления торцевых сечений. К ним относятся задачи о
крутильных, изгибных и чисто сдвиговых ФПУ стержня при продольном осевом,
двухстороннем поперечном и трехстороннем сжатии, об изгибно-крутильной ФПУ при
чистом изгибе и осевом сжатии совместно с чистым изгибом, а также о
пространственно изгибной и крутильной (чисто сдвиговой) ФПУ стержня при
кручении, плоской изгибной и изгибно-крутильной ФПУ в условиях чистого сдвига.
С целью дальнейшего развития и обобщения
описанных выше результатов в работе [5] для плоских криволинейных стержней
произвольного вида были построены линеаризованные уравнения нейтрального
равновесия, позволяющие исследовать все возможные классические и неклассические
ФПУ стержней из ортотропного материала без учета в уравнениях деформационных
параметрических слагаемых. В ней же на основе построенных линеаризованных
уравнений найдены точные аналитические решения задачи об известных плоских
классических изгибно-сдвиговых и неизвестных ранее неклассических изгибно-крутильных
ФПУ кругового кольца при совместном и раздельном действии равномерного внешнего
давления и сжатии в радиальном направлении силами, приложенными к обеим лицевым
поверхностям. Оказалось, что вторая из найденных ФПУ, являющаяся
изгибно-крутильной, реализуется при гораздо меньшем значении критического
внешнего давления, чем первая плоская изгибно-сдвиговая, даже если поперечное
сечение кольца имеет одинаковое значение моментов инерции относительно главных
центральных осей. Данный результат является абсолютно новым и принципиально
важным и указывает на необходимость дальнейшего исследования задач устойчивости
криволинейных стержней.
В настоящей работе на основе уравнений [5]
проводится численное исследование линеаризованных задач о неклассических ФПУ
прямых и криволинейных стержней при различных видах их нагружения
консервативными усилиями и формировании в них неоднородных вдоль осевой линии
внутренних докритических усилий и моментов.
Численное решение указанных задач осуществляется
в два этапа. На первом этапе численно определяются параметры невозмущенного
напряженно-деформированного состояния (НДС), которые являются исходными данными
на втором этапе- численном решении самой задачи устойчивости.
В рамках предлагаемой численной методики для
дискретизации краевых задач, которыми описывается невозмущенное НДС и
нейтральное равновесие стержней, используется хорошо зарекомендовавший себя
метод конечных сумм. В соответствии с ним исходная система дифференциальных
уравнений сводится к системе интегральных равнений Вольтера 2-го рода,
численное решение которой осуществляется методом механических квадратур с
заменой входящих в неё интегральных операторов конечно-суммарными аналогами.
На основе построенной вычислительной методики
создан пакет прикладных программ для системы MATLAB и проведены вычислительные
эксперименты по выявлению и всестороннему исследованию неклассических форм
потери устойчивости прямых и криволинейных стержней при различных видах их
нагружения и закрепления торцевых сечений.
В первой главе дипломной работы изложена
непротиворечивый вариант геометрически нелинейной теории плоских криволинейных
стержней в квадратичном приближении.
Во второй главе численно решён
частный случай задач устойчивости криволинейного плоского стержня. Показано,
что при действии на прямолинейный стержень осевой силы совместно с крутящим
моментом  система
уравнений распадается на две. Система из четырёх уравнений, включающих функции
система
уравнений распадается на две. Система из четырёх уравнений, включающих функции  (прогибы и
углы поворота относительно осей
(прогибы и
углы поворота относительно осей  и
и  ), описывающая изгибные ФПУ, решена
методом механических квадратур.
), описывающая изгибные ФПУ, решена
методом механических квадратур.
В третьей главе рассмотрено
численное решение восьми линеаризованных уравнений равновесия устойчивости
прямолинейных плоских стержней в двух вариантах.
В четвёртой главе устанавливается
достоверность полученных результатов и рассмотрены возможные ФПУ криволинейных
плоских стержней при различных видах нагружения и закрепления торцов.
В пятой главе изложены техника
безопасности и эргономика рабочего места оператора ЭВМ.
В шестой главе дана экономическая
оценка составленного алгоритма и рассчитана его себестоимость.
Глава 1. Непротиворечивый вариант
геометрически нелинейной теории
плоских
криволинейных стержней в квадратичном приближении
.1 Кинематические соотношения
Примем для пространства стержня
параметризацию  (рис.1.1),
(рис.1.1),
Рис.1.1
где  - уравнение осевой линии L,
отнесенный к лонгальному параметру
- уравнение осевой линии L,
отнесенный к лонгальному параметру  ,
,  - вектор, направленный по
касательной к осевой линии L,
- вектор, направленный по
касательной к осевой линии L,  - единичные векторы естественного
базиса на L (рис.1.2).
- единичные векторы естественного
базиса на L (рис.1.2).
Рис.1.2
Причем  ,
,  и для линии
с нулевым кручением плоской кривой имеют место формулы Серре-Френе
и для линии
с нулевым кручением плоской кривой имеют место формулы Серре-Френе
 ,
,  ,
,  ,
,
где k- кривизна осевой линии L.
В принятой параметризации (1.1) в
силу (1.2) параметры Ляме 
 =
= /
/ ,
,  /
/ ,
, /
/ будут равны
будут равны

 =
=  +
+  +
+  ,
, 
а деформации удлинений  и сдвигов
и сдвигов  в полном
квадратичном приближении, использование которых не приводит к появлению
«ложных» бифуркационных решений, в соответствии с результатами работ [1, 2]
через компоненты перемещений
в полном
квадратичном приближении, использование которых не приводит к появлению
«ложных» бифуркационных решений, в соответствии с результатами работ [1, 2]
через компоненты перемещений  выражаются по формулам
выражаются по формулам
 (1.4)
(1.4)
где 

 (1.5)
(1.5)
В дальнейшем будем считать, что
стержень относится к классу тонких, у которого кривизна  и размеры
поперечного сечения удовлетворяют условию
и размеры
поперечного сечения удовлетворяют условию  , где
, где  . В силу этого условия в
знаменателях формул (1.5) с точностью
. В силу этого условия в
знаменателях формул (1.5) с точностью  допустимо принять
допустимо принять  , а для
вектора перемещений
, а для
вектора перемещений  =
=
 +
+

 примем представление
примем представление


 (1.6)
(1.6)
в котором одномерные функции  от
от  являются
компонентами вектора перемещений
являются
компонентами вектора перемещений  точек осевой линии
точек осевой линии  ;
;  -
компонентами вектора поворотов
-
компонентами вектора поворотов  вокруг ортов
вокруг ортов  и , а
функциями
и , а
функциями  и
и  описываются
поперечные деформации стержня.
описываются
поперечные деформации стержня.
Если выражения для из (1.6)
внести в формулы (1.5), то в рамках приближения с точностью до слагаемых,
содержащих  и
и  , для
определения величин
, для
определения величин  можно
получить приближенные формулы
можно
получить приближенные формулы
 (1.7)
(1.7)
При их подстановке в формулы (1.4) с
той же степенью точности для  получим приближенное выражение
получим приближенное выражение
 (1.8)
(1.8)
где
 (1.9)
(1.9)
для  - «точные» выражения
- «точные» выражения
 ,(1.10)
,(1.10)
а для сдвиговых деформаций  -
неупрощенные соотношения вида
-
неупрощенные соотношения вида

 (1.11а)
(1.11а)
В соответствии с результатами работы
[6] соотношения (1.11а), допустимо принять и в упрощенном виде
 (1.11б)
(1.11б)
В них, как и в выражениях (1.8),
(1.10), с принятой степенью точности сохранены главные слагаемые, позволяющие в
рамках уточненной модели Тимошенко описывать деформации растяжения-сжатия и
изгиба в двух направлениях и (формулы (1.10)), поперечные
сдвиговые деформации в плоскостях  и
и  их осредненными значениями в
поперечных сечениях, а также деформацию кручения в рамках классической
стержневой модели.
их осредненными значениями в
поперечных сечениях, а также деформацию кручения в рамках классической
стержневой модели.
1.2 Геометрически нелинейные
уравнения равновесия
Введя для описания процессов
деформирования стержней гипотезу  , составим выражение для вариации
потенциальной энергии деформации
, составим выражение для вариации
потенциальной энергии деформации
 .(1.12)
.(1.12)
После подстановки выражений (1.8) -
(1.10), (1.11а) в (1.12), интегрирования слагаемых (1.12) по частям и введения
обозначений для внутренних усилий и моментов (рис 1.3)
Рис.1.3
 (1.13)
(1.13)

выражение (1.12) можно привести к
виду
 (1.14)
(1.14)
где
 (1.15)
(1.15)

Если материал стержня является
ортотропным, у которого оси ортотропии совпадают с осями  , то
входящие в (1.12), (1.13) компоненты напряжений в пределах линейно упругого
поведения с компонентами деформаций (1.8), (1.10), (1.11) связаны соотношениями
упругости
, то
входящие в (1.12), (1.13) компоненты напряжений в пределах линейно упругого
поведения с компонентами деформаций (1.8), (1.10), (1.11) связаны соотношениями
упругости
 (1.16)
(1.16)
в которых через  обозначены
модули сдвигов, а упругие характеристики
обозначены
модули сдвигов, а упругие характеристики  через модули упругости
через модули упругости  и
коэффициенты Пуассона
и
коэффициенты Пуассона  выражаются
известными зависимостями, приведенными, в частности, в [6].
выражаются
известными зависимостями, приведенными, в частности, в [6].
В дальнейшем будем считать, что в
каждом поперечном сечении стержня  оси и являются главными центральными
осями инерции. Тогда в соответствии с выражениями (1.8), (1.10), (1.11),
(1.16), (1.13) приходим к физическим зависимостям
оси и являются главными центральными
осями инерции. Тогда в соответствии с выражениями (1.8), (1.10), (1.11),
(1.16), (1.13) приходим к физическим зависимостям
 (1.17)
(1.17)

где  - главные моменты инерции
поперечного сечения.
- главные моменты инерции
поперечного сечения.
Предположим, что в каждом поперечном
сечении стержня его
контурная линия задана параметрическим уравнением  ,
,  , где
, где  - длина
дуги вдоль направляющей, а все внешние поверхностные силы, действующие на
стержень в точках его боковой поверхности -
- длина
дуги вдоль направляющей, а все внешние поверхностные силы, действующие на
стержень в точках его боковой поверхности -  , представлены разложением
, представлены разложением  . Вариация
работы этих сил на возможных перемещениях
. Вариация
работы этих сил на возможных перемещениях
 .
.
а также объемных сил

на возможных перемещениях  будет равна
будет равна

 (1.18)
(1.18)
где в силу того, что оси и в каждом
поперечном сечении являются главными центральными осями инерции, для введенных
в рассмотрение внешних усилий и моментов, приведенных к осевой линии стержня,
имеют место формулы
 (1.19)
(1.19)
В дальнейшем введенные в
рассмотрение внешние поверхностные силы  , будем считать приведенными к
четырем векторам погонных сил
, будем считать приведенными к
четырем векторам погонных сил  (рис.1.4),
(рис.1.4),

Рис.1.4
приложенных в точках линий с
координатами  . Векторы
перемещений точек этих линий будут равны
. Векторы
перемещений точек этих линий будут равны
 (1.20)
(1.20)
Если векторы сил  заданы
разложениями
заданы
разложениями
 (1.21)
(1.21)
и в процессе деформирования
сохраняют свои направления, то при использовании выражений (1.20) формулы
(1.19) примут вид
 (1.22)
(1.22)
Обозначим через  векторы
заданных поверхностных сил, приложенных в точках торцевых поперечных сечений
векторы
заданных поверхностных сил, приложенных в точках торцевых поперечных сечений  . Если в
процессе деформирования стержня они сохраняют свои направления и заданы
разложениями
. Если в
процессе деформирования стержня они сохраняют свои направления и заданы
разложениями
 ,(1.23)
,(1.23)
то совершаемая ими работа на
вариациях соответствующих перемещений будет равна
 (1.24)
(1.24)
Где  (1.25)
(1.25)
Внеся теперь составленные выражения
(1.14), (1.20), (1.24) в вариационное уравнение принципа возможных перемещений  , получим
, получим

 (1.26)
(1.26)

из которого следует система восьми
обыкновенных дифференциальных уравнений равновесия

 (1.27)
(1.27)
отнесенных к недеформированным осям,
и соответствующие им статические граничные условия
 при
при  при
при  ,
, при
при  ,
,
 при
при  при
при  при
при ,
,
 при
при  ,
,  при
при  .
.
При подстановке в (1.12) упрощенных
выражений (1.11б) после преобразований следует система из шести обыкновенных
дифференциальных и двух алгебраических уравнений равновесия, что соответствует
принятию равенств 
 (1.28)
(1.28)
и шесть соответствующих им
статических граничных условий
при при , при ,
при при при(1.29)
.3 Линеаризованные уравнения
нейтрального равновесия
При подстановке составленных
соотношений (1.17) в формулы (1.15) для усилий и моментов, входящих в (1.14),
(1.27), (1.28), получаются весьма громоздкие выражения. Проведя их анализ,
можно убедиться в том, что они содержат в себе как «главные» члены,
присутствующие и в известных уравнениях теории гибких стержней, построенных при
введении более сильных ограничений по сравнению с принятыми выше, так и другие
(«не главные») члены, связанные, в частности, с введением дополнительных
неизвестных  для учета
поперечных деформаций стержня. Как следует из анализа результатов, полученных в
работе [2,3], возможность пренебрежения теми или иными слагаемыми,
содержащимися в соотношениях (1.15) и (1.17), главным образом определяется
характером внешнего нагружения стержня и видом формирующегося в нем
напряженного состояния. При этом для оценки степени «главности» слагаемых,
содержащихся в (1.15), одним из критериев может служить степень их влияния на
возможность реализации в стержне тех или иных форм потери устойчивости.
для учета
поперечных деформаций стержня. Как следует из анализа результатов, полученных в
работе [2,3], возможность пренебрежения теми или иными слагаемыми,
содержащимися в соотношениях (1.15) и (1.17), главным образом определяется
характером внешнего нагружения стержня и видом формирующегося в нем
напряженного состояния. При этом для оценки степени «главности» слагаемых,
содержащихся в (1.15), одним из критериев может служить степень их влияния на
возможность реализации в стержне тех или иных форм потери устойчивости.
В связи с изложенным, будем считать,
что на некотором этапе нагружения стержня в нем сформировано такое начальное
напряженное состояние, которое характеризуется начальными усилиями и моментами  . Проведя в
окрестности этого равновесного состояния линеаризацию соотношений (1.15), при
введении стандартных предположений о малости приращений функций
. Проведя в
окрестности этого равновесного состояния линеаризацию соотношений (1.15), при
введении стандартных предположений о малости приращений функций  и их
равенстве нулю в начальном состоянии для приращений усилий и моментов
и их
равенстве нулю в начальном состоянии для приращений усилий и моментов  получим
выражения
получим
выражения
 (1.30)
(1.30)

в которых, в отличие от (1.17),
 (1.31)
(1.31)
Используя последние два выражения
(1.31), для внутреннего крутящего момента приходим к зависимости
 ,(1.32)
,(1.32)
где  - жесткость на кручение поперечного
сечения стержня из ортотропного материала, введенная в рассмотрение в работе
[3] для прямого стержня.
- жесткость на кручение поперечного
сечения стержня из ортотропного материала, введенная в рассмотрение в работе
[3] для прямого стержня.
Если при некоторых значениях
приложенных к стержню «мертвых» [7] внешних сил наряду с начальным равновесным
состоянием возможно и возмущенное равновесное состояние, то для определения их
бифуркационных значений, при достижении которых происходит переход от
начального состояния равновесия в возмущенное, служит вариационное уравнение  , в котором
выражение для
, в котором
выражение для  по виду
совпадает с выражением (1.14). Из этого уравнения после стандартных
преобразований следует система восьми однородных дифференциальных уравнений
нейтрального равновесия
по виду
совпадает с выражением (1.14). Из этого уравнения после стандартных
преобразований следует система восьми однородных дифференциальных уравнений
нейтрального равновесия
 (1.33)
(1.33)
и статические граничные условия в
торцевых сечениях стержня  ,
, 
 при
при 
 при
при  ,
,  при
при  ,
,
 при
при  ,
,  при
при  ,
,  при
при  ,(1.34)
,(1.34)
 при
при  ,
,  при
при  .
.
Используя соотношения (1.30) и
(1.31), составленные уравнения (1.33) можно привести к виду
 (1.35)
(1.35)




 (1.36)
(1.36)

 ,
,
где

 (1.37)
(1.37)
Из (1.37) видно, что
дифференциальные выражения  и
и  содержат разные искомые функции.
Поэтому в том случае, когда в стержне от действия «мертвых» сил формируются
лишь начальные усилия и моменты
содержат разные искомые функции.
Поэтому в том случае, когда в стержне от действия «мертвых» сил формируются
лишь начальные усилия и моменты  , а
, а  , следовательно, и
, следовательно, и  , системы
уравнений (1.35) и (1.36) становятся обособленными.
, системы
уравнений (1.35) и (1.36) становятся обособленными.
Первой из них, принимающей вид
 (1.38)
(1.38)
при  описываются изгибно-крутильные ФПУ
стержня, а при формировании лишь усилия
описываются изгибно-крутильные ФПУ
стержня, а при формировании лишь усилия  - чисто изгибная ФПУ стержня с прямой
осью[3]. Если исходить из самого распространенного варианта кинематических
соотношений, имеющих место при среднем изгибе, то в уравнениях (1.38) остается
лишь одно параметрическое слагаемое
- чисто изгибная ФПУ стержня с прямой
осью[3]. Если исходить из самого распространенного варианта кинематических
соотношений, имеющих место при среднем изгибе, то в уравнениях (1.38) остается
лишь одно параметрическое слагаемое  , являющееся главным. Но при
, являющееся главным. Но при  главными в
(1.38) становятся другие параметрические слагаемые, которые также приводят к
потере устойчивости стержня. Некоторые из них для прямолинейного стержня
изучены в работах [1,3].
главными в
(1.38) становятся другие параметрические слагаемые, которые также приводят к
потере устойчивости стержня. Некоторые из них для прямолинейного стержня
изучены в работах [1,3].
Вторая система уравнений (1.36) в
рассматриваемом случае принимает вид


 (1.39)
(1.39)
Составленные уравнения без потери
содержательности и точности допускают значительные упрощения, если считать
справедливыми равенства  , что
эквивалентно определению сдвиговых деформаций соотношениями (1.11б). При этом
из последних двух уравнений системы (1.39) функции
, что
эквивалентно определению сдвиговых деформаций соотношениями (1.11б). При этом
из последних двух уравнений системы (1.39) функции  легко могут
быть выражены через три оставшиеся функции
легко могут
быть выражены через три оставшиеся функции  , а система однородных
дифференциальных уравнений (1.33) превращается в систему, состоящую из шести
дифференциальных и двух алгебраических уравнений (1.40)
, а система однородных
дифференциальных уравнений (1.33) превращается в систему, состоящую из шести
дифференциальных и двух алгебраических уравнений (1.40)
 (1.40)
(1.40)
и шести статически граничных условий
(1.41)
при при , при ,
при при (1.41)
при.
Глава 2. Численные решения задач
устойчивости прямого стержня с при осевом сжатии с кручением
В данной главе рассмотрен частный
случай решения системы уравнений (1.27), соответствующий действию сжимающей
силы совместно с крутящим моментом, представляющий большой интерес.
На основе линеаризованных уравнений
теории упругой устойчивости прямых стержней, построенных исходя из
непротиворечивых геометрически нелинейных уравнений теории упругости и
произвольных перемещениях и кинематической модели типа Тимошенко, выведенных а
Главе 1, разработан алгоритм численного решения сформулированных задач.
Показано, что такие численные решения существуют лишь для некоторых диапазонов
изменения определяющих параметров стержня и параметра крутящего момента.
.1 Постановка задачи
Предположим, что прямолинейный
стержень, имеющий длину  и площадь
поперечного сечения
и площадь
поперечного сечения  ,отнесен к
прямоугольной декартовой системе координат
,отнесен к
прямоугольной декартовой системе координат  (рис.2.1),
(рис.2.1),
Рис.2.1
в которой оси  и
и  являются
главными центральными осями инерции. Если в начальном (докритическом) состоянии
стержень нагружен осевой силой
являются
главными центральными осями инерции. Если в начальном (докритическом) состоянии
стержень нагружен осевой силой  и крутящим моментом
и крутящим моментом  неизменных
направлений (рис.2.2),
неизменных
направлений (рис.2.2),

Рис.2.2
то составленная в Главе 1 система
восьми линеаризованных уравнений (1.33) теории статической устойчивости
стержней, основанной на использовании для вектора перемещений  уточненной
кинематической модели Тимошенко (1.6) и непротиворечивых кинематических
соотношений теории упругости в полном квадратичном приближении (1.4)
распадается на две несвязанные между собой системы уравнений. Первая из них,
выраженная через перемещение
уточненной
кинематической модели Тимошенко (1.6) и непротиворечивых кинематических
соотношений теории упругости в полном квадратичном приближении (1.4)
распадается на две несвязанные между собой системы уравнений. Первая из них,
выраженная через перемещение  точек осевой линии
точек осевой линии  , угол
закручивания
, угол
закручивания  и функции
обжатия
и функции
обжатия  в
поперечных направлениях, имеет вид
в
поперечных направлениях, имеет вид

 (2.1)
(2.1)
 где
где  - крутильная жесткость поперечного
сечения.
- крутильная жесткость поперечного
сечения.
При раздельном действии сжимающего
усилия  и крутящего
момента
и крутящего
момента  , исходя из
уравнений (1.3), в работе [3] установлены их критические значения, при
достижении которых в стержне происходит крутильная форма потери устойчивости. В
частности, при
, исходя из
уравнений (1.3), в работе [3] установлены их критические значения, при
достижении которых в стержне происходит крутильная форма потери устойчивости. В
частности, при  из второго
уравнения системы (2.1) в силу
из второго
уравнения системы (2.1) в силу  следует формула для определения
значения критической сжимающей силы
следует формула для определения
значения критической сжимающей силы
 ,(2.2)
,(2.2)
из которой видно, что  , где
, где  - модуль
поперечного сдвига. Следовательно, для реальных стержней определяемые решением
системы уравнений (2.1) крутильные ФПУ и соответствующие им критические
нагрузки не представляют особого практического интереса.
- модуль
поперечного сдвига. Следовательно, для реальных стержней определяемые решением
системы уравнений (2.1) крутильные ФПУ и соответствующие им критические
нагрузки не представляют особого практического интереса.
Вторая из указанных систем уравнений
относительно функций  (прогибов в
направлениях осей
(прогибов в
направлениях осей  и
и  ),
),  (углов
поворотов нормальных сечений вокруг осей и ) и соответствующие им граничные
условия имеют вид
(углов
поворотов нормальных сечений вокруг осей и ) и соответствующие им граничные
условия имеют вид

 при
при  при
при  при
при  (2.3)
(2.3)
 при
при 
Где
 (2.4)
(2.4)
Составленной системой уравнений
(2.3), (2.4) описываются изгибные ФПУ стержня, при реализации которых исходная
его прямолинейная ось превращается в некоторую кривую линию с формой, зависящей
от граничных условий. Если торцевые сечения стержня защемлены, то эти условия
имеют вид
 (2.5)
(2.5)
В отличие от (1.8) не так однозначно
формулируются условия шарнирного опирания. Вообще говоря, следует различать два
варианта таких условий. Первый из них соответствует цилиндрическому шарниру,
для которого вместо (2.5), например, имеют место условия
 ,(2.6)
,(2.6)
препятствующие повороту сечения
вокруг оси  . А второй
вариант соответствует сферическому шарниру, для которого вместо (2.6)
формулируются граничные условия вида
. А второй
вариант соответствует сферическому шарниру, для которого вместо (2.6)
формулируются граничные условия вида
 .(2.7)
.(2.7)
Если торцевое сечение стержня не
закреплено, то вместо кинематических граничных условий (2.5) формулируются
статические условия
 .
.
Для стержней, геометрические и
упругие характеристики которых постоянны по длине, после подстановки
соотношений (2.4) система уравнений (2.3) может быть представлена в виде
 (2.8)
(2.8)
 (2.9)
(2.9)
где введены обозначения
 (2.10)
(2.10)
Для дальнейших исследований введем в
рассмотрение безразмерный параметр нагрузки  , связанный с
, связанный с  и
и  зависимостями
(
зависимостями
(  - заданное
число,
- заданное
число,  - плечо
пары сил , создающей
крутящий момент)
- плечо
пары сил , создающей
крутящий момент)
 (2.11)
(2.11)
и безразмерные определяющие
параметры

 (2.12)
(2.12)
в соответствии с которыми
 (2.13)
(2.13)
Используя соотношения (2.4) с учётом
(2.10) уравнения (2.3) представим в виде
 (2.14)
(2.14)

2.2 Алгоритм численного решения
задачи
Построим алгоритм численного решения
сформулированной задачи, основанный на их сведении к системам
интегро-алгебраических уравнений, содержащих операторы типа Вольтера, и
отыскания их решений методом механических квадратур (конечных сумм).
Для приведения уравнений (2.14) к
интегральному виду введем далее вектор  ,
,  с компонентами из функций
перемещений и углов поворотов, определенных на интервале
с компонентами из функций
перемещений и углов поворотов, определенных на интервале  ,
относительно которых формулируются кинематические граничные условия задачи,
т.е.
,
относительно которых формулируются кинематические граничные условия задачи,
т.е.  . Здесь и
далее через
. Здесь и
далее через  обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
Определим вектор
обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
Определим вектор  ,
,  с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.
с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.  . Тогда
уравнения (2.14) могут быть представлены в следующем матричном виде
. Тогда
уравнения (2.14) могут быть представлены в следующем матричном виде
 (2.15)
(2.15)
где  - матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов
- матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов  и
и  в
уравнениях нейтрального равновесия (2.14).
в
уравнениях нейтрального равновесия (2.14).
Заполнение матриц представлено
ниже
 ;
;  ;
;  ;
;  (2.16)
(2.16)
 ;
;  ;
;  ;
;
 (2.17)
(2.17)
Проинтегрируем далее уравнение
(2.15) по  , сводя его
к равенству
, сводя его
к равенству
 (2.18)
(2.18)
где вектор  ,
,  (неизвестных
статических констант интегрирования) определяется соотношением
(неизвестных
статических констант интегрирования) определяется соотношением
 (2.19)
(2.19)
В матричном уравнении (2.18)
выполним замену по правилу
 (2.20)
(2.20)
где через  ,
,  обозначен
вектор с компонентами, равными неизвестным кинематическим константам
интегрирования. С учетом (2.20) равенство (2.18) перепишется в виде
обозначен
вектор с компонентами, равными неизвестным кинематическим константам
интегрирования. С учетом (2.20) равенство (2.18) перепишется в виде
 (2.21)
(2.21)
Для матричного представления
граничных условий введем в рассмотрение некоторые величины. Пусть  ,
,  вектор,
определяемый равенством
вектор,
определяемый равенством
 (2.22)
(2.22)
Обозначим через  матрицы
(2.23), у которых отличны от нуля могут быть только диагональные компоненты
матрицы
(2.23), у которых отличны от нуля могут быть только диагональные компоненты  . Значение
последних определяется видом граничных условий.
. Значение
последних определяется видом граничных условий.
 ;
;  (2.23)
(2.23)
Если перемещение или угол поворота
на торце  или
или  стержня
зафиксирован (т.е. выполняется кинематическое граничное условие), то значение
соответствующего компонента равно нулю. В противном случае оно
равно единице, т.е. выполняется соответствующее статическое граничное условие.
Через
стержня
зафиксирован (т.е. выполняется кинематическое граничное условие), то значение
соответствующего компонента равно нулю. В противном случае оно
равно единице, т.е. выполняется соответствующее статическое граничное условие.
Через  обозначим
единичную матрицу. С учетом введенных величин граничные условия можно
представить в комбинированной матричной форме
обозначим
единичную матрицу. С учетом введенных величин граничные условия можно
представить в комбинированной матричной форме
 (2.24)
(2.24)

где учтено, что  и
и  .
.
Численное решение составленных
уравнений (2.21), (2.24) методом механических квадратур требует замены входящих
в них интегральных операторов конечносуммарными с использованием тех или иных
квадратурных формул относительно дискретных узловых значений искомых
неизвестных. Один из вариантов этого метода, предложенный М.Б.Вахитовым [ 8],
получил в литературе название метода интегрирующих матриц. В соответствии с
этим методом на отрезке  построим
сетку
построим
сетку  и введем в
рассмотрение множество
и введем в
рассмотрение множество  ,
необходимое для нумерации компонент соответствующих матриц. В качестве
неизвестных дескретизированной краевой задачи будем рассматривать вектор
,
необходимое для нумерации компонент соответствующих матриц. В качестве
неизвестных дескретизированной краевой задачи будем рассматривать вектор  ,
составленный из значений искомых неизвестных в узлах сетки по правилу
,
составленный из значений искомых неизвестных в узлах сетки по правилу

 (2.25)
(2.25)
Графическое представление вектора дано ниже









Тогда столбец компонент вектора
перемещений и углов поворотов, производные которых образуют вектор неизвестных,
обозначим через  . Порядок
следования компонент в этом векторе соответствует последнему в векторе
. Порядок
следования компонент в этом векторе соответствует последнему в векторе  .
.
Введем матричные аналоги
интегральных операторов
 .(2.26)
.(2.26)
Эти матрицы представляют собой
блочно-диагональные матрицы с соответствующими интегрирующими матрицами  в качестве
указанных блоков. Здесь интегрирующие матрицы являются аналогами интегральных
операторов
в качестве
указанных блоков. Здесь интегрирующие матрицы являются аналогами интегральных
операторов
 (2.27)
(2.27)
Построение интегрирующих матриц и
анализ соответствующих задач подробно рассмотрен в работе [9]
С учетом введенных величин
зависимость (2.20) в матричном виде запишется как
 (2.28)
(2.28)
Здесь  - четырехблочно-диагональная
матрица (2.29) с ненулевыми единичными столбцами в качестве блоков.
- четырехблочно-диагональная
матрица (2.29) с ненулевыми единичными столбцами в качестве блоков.
 (2.29)
(2.29)
Система уравнений нейтрального
равновесия (2.14), матричная форма которой определяется равенством (2.21),
после замены соответствующих интегральных операторов их матричными аналогами
запишется в дискретном матричном виде
 (2.30)
(2.30)
где  - блочные матрицы с компонентами,
равными значениям соответствующих компонентов в узлах сетки. Вводя обозначения
- блочные матрицы с компонентами,
равными значениям соответствующих компонентов в узлах сетки. Вводя обозначения
 ;
;
 ;(2.31)
;(2.31)
 ;
;
 ,
,
перепишем систему (2.30) в более
компактном виде, допускающем непосредственное программирование
 . (2.32)
. (2.32)
Произведем дискретизацию граничных
условий. Для этого введем в рассмотрение матрицы:  (2.33) с
ненулевыми элементами
(2.33) с
ненулевыми элементами
 ;
;
 (2.33)
(2.33)
четырехблочно-диагональную матрицу  (2.34), у
которой в качестве блоков строк используется первая строка интегрирующей
матрицы
(2.34), у
которой в качестве блоков строк используется первая строка интегрирующей
матрицы  .
.
 (2.34)
(2.34)
Тогда граничные условия (2.24) в
дискретной матричной форме определяются соотношениями

 . (2.35)
. (2.35)
В (2.35) компоненты матриц  равны
значениям функциональных коэффициентов представления (2.15) в узле
равны
значениям функциональных коэффициентов представления (2.15) в узле  . Обозначая
. Обозначая
 (2.36)
(2.36)

преобразуем (2.35) к виду
 ;
;
 . (2.37)
. (2.37)
Объединяя (2.32) и (2.37) в одну
матричную систему, получим
 , (2.38)
, (2.38)
Где
 (2.39)
(2.39)
Проводя стандартные для задач на
собственные значения преобразования, система (2.38) приводится к виду
 , (2.40)
, (2.40)
где  , а
, а  - единичная матрица.
- единичная матрица.
Численная процедура формирования
матриц, поиска собственных значений и соответствующих собственных векторов
задачи реализована в среде пакета MATLAB.
.3 Численные результаты решения
уравнений и их анализ
Для проверки правильности
формирования алгоритма численного решения уравнений (2.14) был исследован
классический случай потери устойчивости- сжатие шарнирно-опёртого
прямолинейного стержня осевой силой  (рис.2.3).
(рис.2.3).
Рис.2.3
Из (2.11) видно, что при  соотношение
принимает вид формулы Эйлера,
соотношение
принимает вид формулы Эйлера,
 (2.41)
(2.41)
вывод которой приведён, например, в
[10]. Т.к. нас интересует наименьшая критическая нагрузка, то в (2.41)
принимаем  и выражение
приобретает вид
и выражение
приобретает вид
 (2.42)
(2.42)
Возьмём стержень длинной 1м,
сечением  мм и
мм и  ,
,  .
Аналитическое решение следует из (2.42)
.
Аналитическое решение следует из (2.42)
 .
.
Найдём численное решение этой задачи
с помощью составленного алгоритма. Для стержня с параметрами, приведёнными
выше, из (2.12) следует  . Форма
потери устойчивости показана на рис.2.4 и 2.5.
. Форма
потери устойчивости показана на рис.2.4 и 2.5.
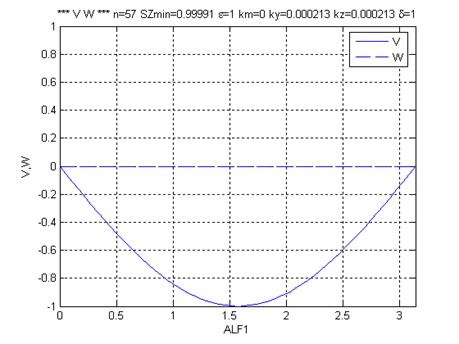
Рис.2.4.
Рис.2.5
В этом случае  . Подставив
. Подставив  в (2.11),
получим
в (2.11),
получим  . Как видим,
численный метод даёт хорошую сходимость с теоретическим результатом при
исследовании устойчивости стойки Эйлера.
. Как видим,
численный метод даёт хорошую сходимость с теоретическим результатом при
исследовании устойчивости стойки Эйлера.
Рассмотрим точность решения
используемого численного метода от количества сечений на стержне, т.е. от шага
сетки.
Таблица 2.1
|
579111315171921
|
|
|
|
|
|
|
|
|
|
|
1,30111,08951,03911,02041,01201,00761,00501,00351,0025
|
|
|
|
|
|
|
|
|
|
|
2325272951575999
|
|
|
|
|
|
|
|
|
|
|
1,00181,00141,00101,00081,0000,99990,99990,9999
|
|
|
|
|
|
|
|
|
|
В таблице 2.1 представлены численные решения
шарнирно-опёртого стержня при различном количестве сечений на стержне. А на
(рис.2.6) дана графическая интерпретация этой таблицы.
Рис.2.6
Видно, что при  решения
стабилизируется и далее не изменяется. Поэтому в дальнейшем следует задавать в пределах
решения
стабилизируется и далее не изменяется. Поэтому в дальнейшем следует задавать в пределах  . Увеличение
приводит к
увеличению времени решения.
. Увеличение
приводит к
увеличению времени решения.
Далее с целью исследования влияния
способов закрепления стержня и введенных в рассмотрение определяющих параметров
 на
минимальное положительное значения параметра критической нагрузки
на
минимальное положительное значения параметра критической нагрузки  для
некоторых диапазонов их изменения были проведены соответствующие расчеты.
Полученные результаты для стержня с параметрами
для
некоторых диапазонов их изменения были проведены соответствующие расчеты.
Полученные результаты для стержня с параметрами  приведены в таблице 2.2.
Расшифровка условий закрепления дана на (рис.2.7).
приведены в таблице 2.2.
Расшифровка условий закрепления дана на (рис.2.7).
Рис.2.7
 Условия
Условия
|
закреп-ления       
|
|
|
|
|
|
|
|
|
|
|
0.5
|
А
|
3.84
|
3.84
|
3.81
|
3.21
|
2.42
|
1.08
|
0.72
|
0.38
|
|
В
|
0.25
|
0.25
|
0.25
|
0.25
|
0.24
|
0.18
|
0.15
|
0.09
|
|
С
|
2.0
|
2.0
|
1.99
|
1.84
|
1.54
|
0.77
|
0.53
|
0.28
|
|
D
|
0.99
|
0.99
|
0.99
|
0.99
|
0.97
|
0.77
|
0.51
|
0.27
|
|
1.0
|
А
|
3.84
|
реше
|
ния
|
отсутст
|
вуют
|
|
|
|
|
B
|
0.25
|
реше
|
ния
|
отсутст
|
вуют
|
|
|
|
|
C
|
2.02
|
реше
|
ния
|
отсутст
|
вуют
|
|
|
|
|
D
|
0.99
|
реше
|
ния
|
отсутст
|
вуют
|
|
|
|
|
5.0
|
А
|
0.79
|
0.79
|
0.79
|
0.73
|
0.62
|
0.32
|
0.22
|
0.12
|
|
B
|
0.05
|
0.05
|
0.05
|
0.05
|
0.05
|
0.04
|
0.032
|
0.021
|
|
C
|
0.41
|
0.41
|
0.41
|
0.40
|
0.36
|
0.22
|
0.16
|
0.09
|
|
D
|
0.20
|
0.20
|
0.20
|
0.19
|
0.19
|
0.16
|
0.14
|
0.08
|
Таблица 2.2
Видно, что одновременное действие на
стержень сжимающей силы и крутящего
момента  приводит к
снижению параметра нагрузки при всех видах закрепления стержня.
Стержень с увеличением
приводит к
снижению параметра нагрузки при всех видах закрепления стержня.
Стержень с увеличением  теряет
устойчивость не в одной плоскости наименьшего момента инерции, а изгибается по
пространственной линии, что можно увидеть на (рис 2.8).
теряет
устойчивость не в одной плоскости наименьшего момента инерции, а изгибается по
пространственной линии, что можно увидеть на (рис 2.8).









Рис.2.8.
Для примера, в случае жёсткого
защемления стержня с обоих торцов (случай А) приведём график, показывающий
зависимость параметра от
коэффициента крутящего момента при  (рис.2.9).
(рис.2.9).
Рис.2.9
Далее для иллюстрации влияния
параметра поперечного сдвига для общего случая, когда  , параметр
нагрузки , найденный
для стержня с шарнирным опиранием на обоих торцах (случай D) при различных
значениях параметров
, параметр
нагрузки , найденный
для стержня с шарнирным опиранием на обоих торцах (случай D) при различных
значениях параметров  , и , приведены
в таблице 2.3.
, и , приведены
в таблице 2.3.
Таблица 2.3
|
00.010.10.51 510 510
|
|
|
|
|
|
|
|
|
|
|
 1.0001.0001.0000.9990.9960.9540.7090.376 1.0001.0001.0000.9990.9960.9540.7090.376
|
|
|
|
|
|
|
|
|
|
0.25
|
 0.9900.9900.9900.9860.9750.8710.7090.376 0.9900.9900.9900.9860.9750.8710.7090.376
|
|
|
|
|
|
|
|
|
|
 0.9090.9090.9860.8940.8560.6260.4810.287 0.9090.9090.9860.8940.8560.6260.4810.287
|
|
|
|
|
|
|
|
|
|
1.0001.0000.9990.9950.9820.5490.3630.190
|
|
|
|
|
|
|
|
|
|
1
|
0.9900.9900.9900.9830.9620.5490.3630.190
|
|
|
|
|
|
|
|
|
|
0.9090.9090.9080.8880.8340.5450.3620.190
|
|
|
|
|
|
|
|
|
|
0.8000.8000.7920.6660.5060.2320.1570.083
|
|
|
|
|
|
|
|
|
|
5
|
0.7940.7940.7860.6630.5050.2320.1570.083
|
|
|
|
|
|
|
|
|
|
 0.7410.7410.7350.6350.4940.2310.1560.083 0.7410.7410.7350.6350.4940.2310.1560.083
|
|
|
|
|
|
|
|
|
Для иллюстрации таблицы 2.3.
приведём график зависимости , когда  при
при  и различных
параметрах .
и различных
параметрах .
Рис.2.9
Видно что при  (
( ) снижение
параметра нагрузки не
происходит. Это объясняется тем, что при чистом кручении стержня потеря
устойчивости происходит чисто по изгибной форме без проявления деформаций
поперечных сдвигов, а при
) снижение
параметра нагрузки не
происходит. Это объясняется тем, что при чистом кручении стержня потеря
устойчивости происходит чисто по изгибной форме без проявления деформаций
поперечных сдвигов, а при  (т.е.
(т.е.  ) влияние на
поперечных
сдвигов является наиболее заметным.
) влияние на
поперечных
сдвигов является наиболее заметным.
Как видно из приведённых численных
экспериментов при всех значениях определяющего параметра численные
решения существуют только в случае чистого сжатия стержня, когда . При этом
система уравнений (2.14) распадается на две не связанные между собой системы,
численные решения которых методом механических квадратур являются абсолютно
устойчивыми и быстро сходящимися при увеличении количества сечений . При  , когда , численных
решений задачи вообще не удалось получить, а при
, когда , численных
решений задачи вообще не удалось получить, а при  и увеличении полученные
решения, как следует из таблицы 2.2 оказались завышенными, по сравнению с
аналитическими решениями, найденными в [11]. Такое поведение численных решений
методом, показавшим свою высокую точность и хорошую сходимость на многих
задачах механики деформируемых твердых тел за сорок лет его успешного
применения (см., например [12]), по видимому, объясняется лишь не
исследованными в данной работе свойствами исходных уравнений (2.14) при .
и увеличении полученные
решения, как следует из таблицы 2.2 оказались завышенными, по сравнению с
аналитическими решениями, найденными в [11]. Такое поведение численных решений
методом, показавшим свою высокую точность и хорошую сходимость на многих
задачах механики деформируемых твердых тел за сорок лет его успешного
применения (см., например [12]), по видимому, объясняется лишь не
исследованными в данной работе свойствами исходных уравнений (2.14) при .
Глава 3. Численные решения задач
устойчивости криволинейного
плоского
стержня
3.1 Постановка задачи
В Главе 1 были получены непротиворечивые
соотношения геометрически нелинейной теории плоских криволинейных стержней в
квадратичном приближении (1.33) и (1.40). Решим поставленную задачу методом
механических квадратур, как это было сделано в Главе 2 для прямолинейного
стержня. Только в этом случае усилия и моменты (1.13) при формировании в
стержне докритического НДС не будут постоянны по длине стрежня. В этом случае
задача будет решаться в два этапа:
На первом этапе- этапе нагружения,
решается задача НДС. Находятся докритические усилия и моменты в
линеаризованных уравнениях (1.35) и (1.36). При этом численно решается система
однородных алгебраических уравнений вида  , где
, где  -матрица, элементами которой
являются коэффициенты уравнений,
-матрица, элементами которой
являются коэффициенты уравнений,  -столбец, элементами которого
являются восемь неизвестных (перемещения и углы поворота),
-столбец, элементами которого
являются восемь неизвестных (перемещения и углы поворота),  -столбец,
элементами которого являются нагрузки (распределённые усилия и моменты по длине
стержня, а также силы и моменты на концах), действующие на стержень.
-столбец,
элементами которого являются нагрузки (распределённые усилия и моменты по длине
стержня, а также силы и моменты на концах), действующие на стержень.
На втором этапе, после нахождения
усилий и моментов, действующих на стержень, решаются уравнения (1.33). При этом
решается задача на собственные значения. Находятся собственные значения и
собственные вектора матриц уравнений и на основе их производится анализ и
делается заключение о форме потери устойчивости и критической нагрузке.
Как уже было сказано в Главе 1, при
действии на стержень «мертвых» сил формируются лишь начальные усилия и моменты , а ,
следовательно, и , системы
уравнений (1.35) и (1.36) становятся обособленными, поэтому алгоритм будет
построен таким образом, чтобы учитывать это разделение уравнений. При действии
соответствующих сил и моментов будут решаться либо три, либо пять, либо восемь уравнений.
Уравнения НДС (1.27) и уравнения
устойчивости (1.33) решаются двух видов: при  и . Ниже будут рассмотрены оба
численных алгоритма решения задач НДС и устойчивости и дан анализ результатов.
и . Ниже будут рассмотрены оба
численных алгоритма решения задач НДС и устойчивости и дан анализ результатов.
.2 Алгоритм численного решения
задачи НДС плоского криволинейного стержня при
Алгоритм решения задачи НДС методом
механических квадратур аналогичен алгоритму, представленному в Главе 2. Отличие
состоит лишь в том, что в данной задаче определяется столбец неизвестных ,
компонентами которого являются производные перемещений и углов поворота узлов
сетки. Также в правой части уравнений НДС (1.27) имеются члены, являющиеся действующими
силами и моментами, которые содержит столбец .
Для их приведения к интегральному
виду введем далее вектор  ,
,  с
компонентами из функций перемещений и углов поворотов, определенных на
интервале
с
компонентами из функций перемещений и углов поворотов, определенных на
интервале  ,
относительно которых формулируются кинематические граничные условия задачи,
т.е.
,
относительно которых формулируются кинематические граничные условия задачи,
т.е.  . Здесь и
далее через
. Здесь и
далее через  обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
Определим вектор
обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
Определим вектор  ,
,  с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.
с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.  ,
,
и вектор с
компонентами, равными распределенным нагрузкам т.е
с
компонентами, равными распределенным нагрузкам т.е  . Тогда
уравнения (1.27) могут быть представлены в следующем матричном виде
. Тогда
уравнения (1.27) могут быть представлены в следующем матричном виде
 , (3.1)
, (3.1)
где  - матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов
- матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов  и
и  в
уравнениях нейтрального равновесия (2.16). Заполнение матриц
в
уравнениях нейтрального равновесия (2.16). Заполнение матриц  представлено
на (рис.3.1- 3.4).
представлено
на (рис.3.1- 3.4).
Рис.3.1
Рис.3.2
Рис.3.3

Рис.3.4Проинтегрируем далее
уравнение (3.1) по  , сводя его
к равенству
, сводя его
к равенству
 (3.2)
(3.2)
где вектор  ,
,  (неизвестных
статических констант интегрирования) определяется соотношением
(неизвестных
статических констант интегрирования) определяется соотношением
 . (3.5)
. (3.5)
В матричном уравнении (3.2) выполним
замену по правилу
 , (3.6)
, (3.6)
где через  ,
,  обозначен
вектор с компонентами, равными неизвестным кинематическим константам
интегрирования. С учетом (3.6) равенство (3.2) перепишется в виде
обозначен
вектор с компонентами, равными неизвестным кинематическим константам
интегрирования. С учетом (3.6) равенство (3.2) перепишется в виде
 (3.7)
(3.7)
Для матричного представления
граничных условий введем в рассмотрение некоторые величины. Пусть  ,
,  вектор,
определяемый равенством
вектор,
определяемый равенством
 . (3.8)
. (3.8)
Обозначим через  матрицы, у
которых отличны от нуля могут быть только диагональные компоненты
матрицы, у
которых отличны от нуля могут быть только диагональные компоненты  (рис.3.5).
(рис.3.5).
Рис.3.5
Значение последних определяется
видом граничных условий. Если перемещение или угол поворота на торце  или
или  стержня
зафиксирован (т.е. выполняется кинематическое граничное условие), то значение
соответствующего компонента
стержня
зафиксирован (т.е. выполняется кинематическое граничное условие), то значение
соответствующего компонента  равно нулю. В противном случае оно
равно единице, т.е. выполняется соответствующее статическое граничное условие.
Через
равно нулю. В противном случае оно
равно единице, т.е. выполняется соответствующее статическое граничное условие.
Через  обозначим
единичную матрицу (рис.3.6).
обозначим
единичную матрицу (рис.3.6).

Рис.3.6
С учетом введенных величин граничные
условия можно представить в комбинированной матричной форме
 , (3.9)
, (3.9)
где  вектор, элементами которого
являются силы и моменты приложенные на концах стержня, т.е.
вектор, элементами которого
являются силы и моменты приложенные на концах стержня, т.е.

 ,
,
где учтено, что  и
и  .
.
Численное решение составленных
уравнений (3.7), (3.9) методом механических квадратур требует замены входящих в
них интегральных операторов конечносуммарными с использованием тех или иных
квадратурных формул относительно дискретных узловых значений искомых
неизвестных. Один из вариантов этого метода, предложенный М.Б.Вахитовым [8],
получил в литературе название метода интегрирующих матриц. В соответствии с
этим методом на отрезке  построим
сетку
построим
сетку  и введем в
рассмотрение множество
и введем в
рассмотрение множество  ,
необходимое для нумерации компонент соответствующих матриц. В качестве
неизвестных дескретизированной краевой задачи будем рассматривать вектор ,
составленный из значений искомых неизвестных в узлах сетки по правилу
,
необходимое для нумерации компонент соответствующих матриц. В качестве
неизвестных дескретизированной краевой задачи будем рассматривать вектор ,
составленный из значений искомых неизвестных в узлах сетки по правилу
 . (3.10)
. (3.10)
Тогда столбец компонент вектора
перемещений и углов поворотов, производные которых образуют вектор неизвестных,
обозначим через . Порядок
следования компонент в этом векторе соответствует последнему в векторе .
Введем матричные аналоги
интегральных операторов
. (3.11)
Эти матрицы представляют собой
блочно-диагональные матрицы с соответствующими интегрирующими матрицами в качестве
указанных блоков (рис.3.7).
Рис.3.7
Здесь интегрирующие матрицы являются
аналогами интегральных операторов
 .(3.12)
.(3.12)
Построение интегрирующих матриц и
анализ соответствующих задач подробно рассмотрен в работе [9]
С учетом введенных величин
зависимость (3.6) в матричном виде запишется как
(3.13)
Здесь  - восьмиблочная-диагональная
матрица с ненулевыми единичными столбцами в качестве блоков (рис.3.8).
- восьмиблочная-диагональная
матрица с ненулевыми единичными столбцами в качестве блоков (рис.3.8).
Рис.3.8
Система уравнений нейтрального
равновесия (1.27), матричная форма которой определяется равенством (3.2), после
замены соответствующих интегральных операторов их матричными аналогами
запишется в дискретном матричном виде
 (3.14)
(3.14)
где  - блочные матрицы с компонентами,
равными значениям соответствующих компонентов в узлах сетки. Вводя обозначения
- блочные матрицы с компонентами,
равными значениям соответствующих компонентов в узлах сетки. Вводя обозначения
 ;
;
 ; (3.15)
; (3.15)
 ;
;
 ,
,
перепишем систему (3.15) в более
компактном виде, допускающем непосредственное программирование
 . (3.16)
. (3.16)
Произведем дискретизацию граничных
условий. Для этого введем в рассмотрение матрицы:  с
ненулевыми элементами
с
ненулевыми элементами  (рис.3.9);
(рис.3.9);
Рис.3.9
восьмиблочную-диагональную матрицу  , у которой
в качестве блоков строк используется первая строка интегрирующей матрицы (рис.3.10).
, у которой
в качестве блоков строк используется первая строка интегрирующей матрицы (рис.3.10).
Рис.3.10
Тогда граничные условия (3.9) в
дискретной матричной форме определяются соотношениями

 . (3.17)
. (3.17)
В (3.17) компоненты матриц  равны
значениям функциональных коэффициентов представления (3.1) в узле
равны
значениям функциональных коэффициентов представления (3.1) в узле  . Обозначая
. Обозначая
 (3.18)
(3.18)

преобразуем (3.18) к виду
 ;
;
 . (3.19)
. (3.19)
Объединяя (3.15) и (3.19) в одну
матричную систему, получим
 , (3.20)
, (3.20)
Где
 (3.21)
(3.21)
Вектор  находим
решением системы (3.20)
находим
решением системы (3.20)
Графическое представление матричного уравнения
(3.20) дано на (рис.3.11).








8


1 


7n+1 8n 
1 8 
1 8 
1 
7n+1 8n 
1 8 
1 8 


Рис.3.11
 (3.22)
(3.22)
Численная процедура формирования
матриц, поиска решения уравнения (3.22) задачи реализована в среде пакета
MATLAB.
.3 Алгоритм численного решения
задачи НДС плоского криволинейного стержня при
В предыдущем разделе был описан
алгоритм формирования матриц и решения системы восьми обыкновенных
дифференциальных уравнений (1.27) методом механических квадратур исходя из
того, что во всех восьми уравнениях присутствуют производные первого и второго
порядка. При решении уравнений (1.40) совместно решаются шесть дифференциальных
и два алгебраических уравнения, что приводит к некоторому изменению
существующего алгоритма.
Введём вектор , с
компонентами из функций перемещений и углов поворотов, определенных на
интервале  ,
относительно которых формулируются кинематические граничные условия задачи,
т.е.
,
относительно которых формулируются кинематические граничные условия задачи,
т.е.  . Здесь
через обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
Определим вектор
. Здесь
через обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
Определим вектор  ,
,  с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.
с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.  , и вектор с
компонентами, равными распределенным нагрузкам т.е . Тогда
уравнения (1.28) могут быть представлены в следующем матричном виде
, и вектор с
компонентами, равными распределенным нагрузкам т.е . Тогда
уравнения (1.28) могут быть представлены в следующем матричном виде
 (3.23)
(3.23)

где 
 (3.24)
(3.24)
 ,
, - матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов и . Матрицы и представлены
на рис.(3.12-3.15).
- матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов и . Матрицы и представлены
на рис.(3.12-3.15).

Рис.3.13

Рис.3.14
Рис.3.15


Рис.3.16
Пусть  - столбец констант интегрирования,
тогда столбец неизвестных может быть представлен в виде
- столбец констант интегрирования,
тогда столбец неизвестных может быть представлен в виде
 ,
,  ,
,  (3.25)
(3.25)
где  (
( )- матрица-фильтр, структура которой
изображена на (рис.3.17)
)- матрица-фильтр, структура которой
изображена на (рис.3.17)
Рис.3.17
Интегрирующую матрицу  заполним
следующим образом
заполним
следующим образом
Рис.3.18
В матричном виде соотношение (3.24) будет иметь
вид
 (3.26)
(3.26)
После подстановки (3.24),(3.26) в
(3.23) и некоторых преобразований, получим систему уравнений
 (3.27)
(3.27)
 (3.28)
(3.28)
Далее введём интегральный матричный
оператор  , и
блочно-диагональную матрицу
, и
блочно-диагональную матрицу  - (рис.3.19).
- (рис.3.19).

Рис.3.19
Пусть  - столбец констант интегрирования,
тогда после интегрирования выражения (3.27) система (3.27)-(3.28) запишется в
виде
- столбец констант интегрирования,
тогда после интегрирования выражения (3.27) система (3.27)-(3.28) запишется в
виде

(3.29)
 (3.30)
(3.30)
Введём обозначения


 (3.31)
(3.31)

Тогда система (3.28)-(3.29) запишется
в виде
 (3.32)
(3.32)
Для представления граничных условий
в (3.24) введём систему коэффициентов  , тогда граничные условия в
комбинированной форме можно записать в виде
, тогда граничные условия в
комбинированной форме можно записать в виде
 (3.33)
(3.33)
 (3.34)
(3.34)
где
 (3.35)
(3.35)
В (3.33) и (3.34)  , где
, где  - единичная
матрица, только не квадратная, а прямоугольная, представленная на (рис.3.20)
- единичная
матрица, только не квадратная, а прямоугольная, представленная на (рис.3.20)
Из (3.34) следует  , а из
(3.33)-
, а из
(3.33)-

(3.36)
С учётом (3.35) и (3.36) граничные
условия (3.33) и (3.34) запишутся в виде

(3.37)
 (3.38)
(3.38)
Далее введём в (3.37) обозначение
 (3.39)
(3.39)
а в (3.38)
 (3.40)
(3.40)
где  , представленная на (рис.3.21)-
шестиблочно-диагональная матрица, у которой в качестве блоков используется
последняя строка интегрирующей матрицы
, представленная на (рис.3.21)-
шестиблочно-диагональная матрица, у которой в качестве блоков используется
последняя строка интегрирующей матрицы  .
.
Рис.3.21
В (3.33) введём преобразование
 (3.41)
(3.41)
где  , блочно-диагональная матрица с
ненулевыми элементами
, блочно-диагональная матрица с
ненулевыми элементами
(рис.3.9).
Далее преобразуем (3.33)
 (3.42)
(3.42)
Блочно-диагональные матрицы  и
и  представлены
на (рис.3.22-3.23)
представлены
на (рис.3.22-3.23)

С учётом введённых обозначений
граничные условия запишутся в виде
 (3.43)
(3.43)
 (3.44)
(3.44)
Далее введём матрицы
 (3.45)
(3.45)
 (3.46)
(3.46)
 (3.47)
(3.47)
Дополнительные строки в матрице
 (3.48)
(3.48)
Графическое представление матричного
уравнения (3.23) и граничных условий дано на (рис.3.34)


8
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
  
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5n+1
6n
|
|
|
|
|
|
|
|
|
|
|
|
6n+1
7n
|
|
|
|
  
|
|
|
|
|
|
|
7n+1
8n
|
|
|
|
|
|
|
|
|
|
|
1
6
|
|
|
|
 
|
|
|
|
|
|
|
7
|
|
|
|
|
|
|

|
|
|
|
|
1
6
|
|
|
|
  
|
|
|
|
|
|
|
7
|
|
|
|
|
|
|
|
|
|
|
|
1
6n
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
6n+1
8n
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 6
|

|
|
|
0
|
1 6
|
|
|
|
0
|
1
7n+1 8n 
1 8
1 6

Рис.3.34
.4 Алгоритм численного решения задачи
устойчивости плоского криволинейного стержня
После численного решения задачи НДС
и нахождения докритических усилий и моментов , их подстановки в соотношения
(1.35) и (1.36) получим систему линеаризованных однородных дифференциальных
уравнений устойчивости. Уравнения устойчивости, в отличие от уравнений НДС не
разделяются. Учитываю это построим алгоритм их решения.
Введем далее вектор  ,
,  с
компонентами из функций перемещений и углов поворотов, определенных на
интервале
с
компонентами из функций перемещений и углов поворотов, определенных на
интервале ,
относительно которых формулируются кинематические граничные условия задачи,
т.е.
,
относительно которых формулируются кинематические граничные условия задачи,
т.е.  . Здесь и
далее через
. Здесь и
далее через  обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
обозначается
(m,n) - мерное линейное пространство всех вещественных матриц размера (m x n).
Определим вектор  ,
,  с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.
с
компонентами, принимаемыми далее в качестве основных неизвестных функций, т.е.
 .
.
Тогда уравнения (1.33) могут быть
представлены в следующем матричном виде
 , (3.49)
, (3.49)
где  - матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов
- матрицы с функциональными
коэффициентами, равными сомножителям при компонентах векторов  и
и  в
уравнениях нейтрального равновесия (1.33). Матрицы функциональных коэффициентов
представлены
на (рис.3.35-3.42).
в
уравнениях нейтрального равновесия (1.33). Матрицы функциональных коэффициентов
представлены
на (рис.3.35-3.42).

Рис.3.35
Рис.3.37
Рис.3.38
Рис.3.39

Рис.3.40

Рис.3.41
Рис.3.42Проинтегрируем далее
уравнение (3.49) по  , сводя его
к равенству
, сводя его
к равенству
 (3.49)
(3.49)
Г
де вектор  ,
,  (неизвестных
статических констант интегрирования),представленный на (рис.3.43)
(неизвестных
статических констант интегрирования),представленный на (рис.3.43)
Рис.3.43
определяется соотношением
 (3.50)
(3.50)
В матричном уравнении (3.49)
выполним замену по правилу
 (3.51)
(3.51)
где через  ,
,  обозначен
вектор с компонентами, равными неизвестным кинематическим константам
интегрирования. С учетом (3.51) равенство (3.49) перепишется в виде
обозначен
вектор с компонентами, равными неизвестным кинематическим константам
интегрирования. С учетом (3.51) равенство (3.49) перепишется в виде
 (3.52)
(3.52)
Для матричного представления
граничных условий введем в рассмотрение некоторые величины. Пусть  ,
,  вектор,
определяемый равенством
вектор,
определяемый равенством
 (3.53)
(3.53)
Обозначим через  матрицы,
представленные на (рис.3.5), у которых отличны от нуля могут быть только
диагональные компоненты
матрицы,
представленные на (рис.3.5), у которых отличны от нуля могут быть только
диагональные компоненты  . Значение
последних определяется видом граничных условий. Если перемещение или угол
поворота на торце стержня зафиксирован (т.е. выполняется кинематическое
граничное условие), то значение соответствующего компонента равно нулю.
В противном случае оно равно единице, т.е. выполняется соответствующее
статическое граничное условие. Через обозначим единичную матрицу
(рис.3.6). С учетом введенных величин граничные условия можно представить в
комбинированной матричной форме
. Значение
последних определяется видом граничных условий. Если перемещение или угол
поворота на торце стержня зафиксирован (т.е. выполняется кинематическое
граничное условие), то значение соответствующего компонента равно нулю.
В противном случае оно равно единице, т.е. выполняется соответствующее
статическое граничное условие. Через обозначим единичную матрицу
(рис.3.6). С учетом введенных величин граничные условия можно представить в
комбинированной матричной форме
 при
при  (3.54)
(3.54)
где вектор, элементами которого
являются силы и моменты приложенные на концах стержня, т.е.

 при
при  (3.55)
(3.55)
где учтено, что  и
и  .
.
Построим сетку  и введем в
рассмотрение множество
и введем в
рассмотрение множество  ,
необходимое для нумерации компонент соответствующих матриц. В качестве
неизвестных дескретизированной краевой задачи будем рассматривать вектор ,
составленный из значений искомых неизвестных в узлах сетки по правилу
,
необходимое для нумерации компонент соответствующих матриц. В качестве
неизвестных дескретизированной краевой задачи будем рассматривать вектор ,
составленный из значений искомых неизвестных в узлах сетки по правилу
(3.56)
Тогда столбец компонент вектора
перемещений и углов поворотов, производные которых образуют вектор неизвестных,
обозначим через  . Порядок
следования компонент в этом векторе соответствует последнему в векторе
. Порядок
следования компонент в этом векторе соответствует последнему в векторе  .
.
Введем матричные аналоги
интегральных операторов
 ;
;  ;
;  (3.57)
(3.57)
Эти матрицы представляют собой
блочно-диагональные матрицы с соответствующими интегрирующими матрицами  в качестве
указанных блоков. Здесь интегрирующие матрицы являются аналогами интегральных
операторов
в качестве
указанных блоков. Здесь интегрирующие матрицы являются аналогами интегральных
операторов  ,
,  .
.
С учетом введенных величин
зависимость (3.51) в матричном виде запишется как
 (3.58)
(3.58)
Здесь  - восьмиблочная-диагональная
матрица с ненулевыми единичными столбцами в качестве блоков- (рис.3.8).
- восьмиблочная-диагональная
матрица с ненулевыми единичными столбцами в качестве блоков- (рис.3.8).
Система уравнений нейтрального
равновесия
 (3.59)
(3.59)
где  - блочные матрицы с компонентами,
равными значениям соответствующих компонентов в узлах сетки. Вводя обозначения
- блочные матрицы с компонентами,
равными значениям соответствующих компонентов в узлах сетки. Вводя обозначения
 ,
, 
 ,
,  (3.60)
(3.60)
 ,
, 
 ,
, 
перепишем систему в более компактном
виде, допускающем непосредственное программирование
 (3.61)
(3.61)
Произведем дискретизацию граничных
условий. Для этого введем в рассмотрение матрицы:  с
ненулевыми элементами ;
восьмиблочно-диагональную матрицу
с
ненулевыми элементами ;
восьмиблочно-диагональную матрицу  , у которой в качестве блоков строк
используется первая строка интегрирующей матрицы
, у которой в качестве блоков строк
используется первая строка интегрирующей матрицы  . Тогда граничные условия в
дискретной матричной форме определяются соотношениями
. Тогда граничные условия в
дискретной матричной форме определяются соотношениями

при (3.62)
 при
при
Компоненты матриц  равны
значениям функциональных коэффициентов в узле . Обозначая
равны
значениям функциональных коэффициентов в узле . Обозначая
 ,
, 
 ,
, 
 ,
, 
 ,
,  (3.63)
(3.63)
 ,
, 
 ,
, 
преобразуем (3.62) к виду
 при
при
 при (3.64)
при (3.64)
Объединяя все в одну матричную
систему, получим
 ,
,  (3.65)
(3.65)
где
 ,
,  ,
,  (3.66)
(3.66)
Проводя стандартные для задач на
собственные значения преобразования, система приводится к виду
 ,
,  (3.67)
(3.67)
где  ,
,  , а
, а  - единичная матрица.
- единичная матрица.
Численная процедура формирования
матриц, нахождения собственных значений и собственных векторов уравнений
производилась на языке MatLab.
Глава 4. Проверка и анализ результатов,
полученных численным решением задач НДС и устойчивости плоских криволинейных
стержней
.1 Проверка алгоритма решения задач НДС
При решении задач численными методами всегда
возникает потребность в проверке созданного алгоритма. Проверяется решение, как
правило, на простых задачах, решение которых известно или может быть найдено
точно.
Рассмотрим несколько классических случаев
нагружения балки и рассчитаем перемещения формулами сопротивления материалов,
методом конечных элементов (МКЭ) в программном комплексе Ansys, и созданном
алгоритме. В МКЭ используем два вида конечных элементов, которые моделируют
балку Кирхгофа-Лява (без учёта поперечных сдвиговых деформаций) и балку типа Тимошенко
(с учётом поперечных сдвиговых деформаций).
Исследуем балку квадратного сечения со сторонами
0,05м- (рис.4.1)

Рис.4.1
Характеристика материала: ,  , длина
балки
, длина
балки  . Схема
нагружения и расчётные формулы сопротивления материалов, которые выведены,
например, в [13] сведены в табл.4.1.
. Схема
нагружения и расчётные формулы сопротивления материалов, которые выведены,
например, в [13] сведены в табл.4.1.
Таблица 4.1
|
Схема
нагружения
|
Расчётные
формулы
|
 ;
; 
 ;
;  ;
;
|
 ; ; 
|
|
Далее вычислим максимальные прогибы  для
вышеперечисленных видов нагружения методом конечных элементов. Для последующего
анализа используем три вида конечных элементов: одномерный элемент балки
Кирхгофа-Лява Beam4, одномерный элемент балки типа Тимошенко Beam188 и для
того, чтобы окончательно проверить результат- трёхмерный элемент Solid86, т.е.
смоделируем балку как трёхмерное тело. В таблице 4.2 представлены результаты
расчёта МКЭ.
для
вышеперечисленных видов нагружения методом конечных элементов. Для последующего
анализа используем три вида конечных элементов: одномерный элемент балки
Кирхгофа-Лява Beam4, одномерный элемент балки типа Тимошенко Beam188 и для
того, чтобы окончательно проверить результат- трёхмерный элемент Solid86, т.е.
смоделируем балку как трёхмерное тело. В таблице 4.2 представлены результаты
расчёта МКЭ.
Таблица 4.2
|
Схема
нагружения
|
Перемещения,
м (балка Кирхгофа-Лява)
|
Перемещения,м
(балка Тимошенко)
|
|
-2,0·10-5
|
|
|
|
 -0,03199-0,032 -0,03199-0,032
|
|
|
|
 -0,0119-0,0123 -0,0119-0,0123
|
|
|
|
 0,0480,048 0,0480,048
|
|
|
|
 0,12530,14583 0,12530,14583
|
|
|
|
 2,5·10-42,5·10-4 2,5·10-42,5·10-4
|
|
|
Как видно из таблицы оба вида конечных элементов
дают практически идентичные результаты, что объясняется большой гибкостью
исследуемой балки(малым влиянием поперечных сдвиговых деформаций). Чтобы
окончательно убедиться в правильности найденных результатов смоделируем изгиб
трёхмерной балки.
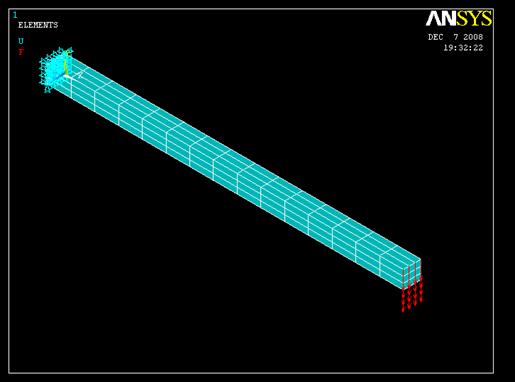
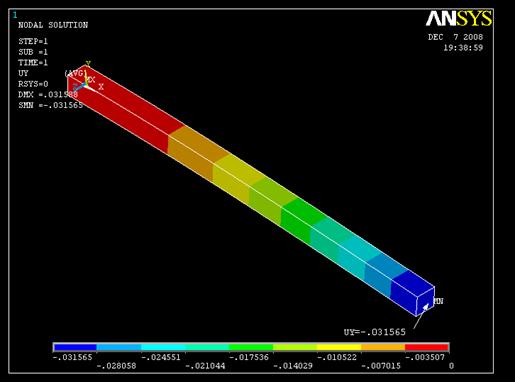
Рис.4.2
На (рис.4.2) видно, что перемещение свободного
конца консольной балки равно 0,032м. Этот результат полностью сходится с
предыдущими, полученными с помощью одномерных конечных элементов.
В таблице 4.3 сведены результатов проверки, в
том числе и результаты созданного алгоритма. Из таблицы видно, что все решения
хорошо сходятся с теоретическими, поэтому можно приступать к решению более
сложных задач.
Таблица 4.3
|
Схема
нагружения
|
Максимальный
прогиб(), м
|
|
Теоретическое
значение
|
МКЭ
|
Численное
значение
|
|
|
|
|
 
|
|
|
 -2·10-5-2·10-5-2·10-5-2·10-5-2·10-5 -2·10-5-2·10-5-2·10-5-2·10-5-2·10-5
|
|
|
|
|
|
|
 -0,032-0,032-0,032-0,032-0,032 -0,032-0,032-0,032-0,032-0,032
|
|
|
|
|
|
|
 -0,012-0,0119-0,0123-0,012-0,012 -0,012-0,0119-0,0123-0,012-0,012
|
|
|
|
|
|
|
 0,0480,0480,0480,0480,048 0,0480,0480,0480,0480,048
|
|
|
|
|
|
|
 0,12480,12530,14580,1240,124 0,12480,12530,14580,1240,124
|
|
|
|
|
|
|
 2,5·10-42,5·10-42,5·10-42,5·10-42,5·10-4 2,5·10-42,5·10-42,5·10-42,5·10-42,5·10-4
|
|
|
|
|
|
4.2 Решения задач устойчивости криволинейного
плоского стержня (арки)
Исследуем формы потери устойчивости(ФПУ)
криволинейного плоского стержня- полукольца длиной L=1м и радиусом R=0.32м при
различных видах закрепления, и различных видах поперечных сечений. Формы
поперечных сечений- квадратное, прямоугольное с соотношением сторон 1:2 и
прямоугольное, с соотношение сторон 1:3. Это сделано для того, чтобы
реализовать изгибно-крутильную и изгибно-сдвиговую ФПУ в данном примере.
Изгибно-сдвиговая- это ФПУ, при которой
полукольцо теряет устойчивость в своей плоскости, например, круговое кольцо
деформируется в эллипс. Изгибно-крутильная- это ФПУ, при которой полукольцо
выходит из своей плоскости, превращаясь в «восьмёрку». Это ФПУ можно наблюдать
на велосипедном колесе. В плоскости вращения колесо, подкреплённое спицами,
довольно жёсткое, а в плоскости, перпендикулярной плоскости вращения, колесо
чаще всего теряет устойчивость, превращаясь в «восьмёрку».
На (рис.4.3) представлены формы исследуемых
поперечных сечений.
Рис.4.3
Для каждого вида закрепления арки
подставим поочерёдно три поперечных сечения. Виды закрепления и нагружения
представлены на (рис.4.4). Будем прикладывать к стержню единичную нагрузку,
тогда собственное значение , найденное из системы уравнений
(1.33), будет равно критической нагрузке, а собственный вектор  ,
соответствующий собственному значению будет показывать ФПУ.
,
соответствующий собственному значению будет показывать ФПУ.
На (рис.4.5-4.30) даны схемы
нагружения и виды ФПУ.

Рис.4.4

Рис.4.5
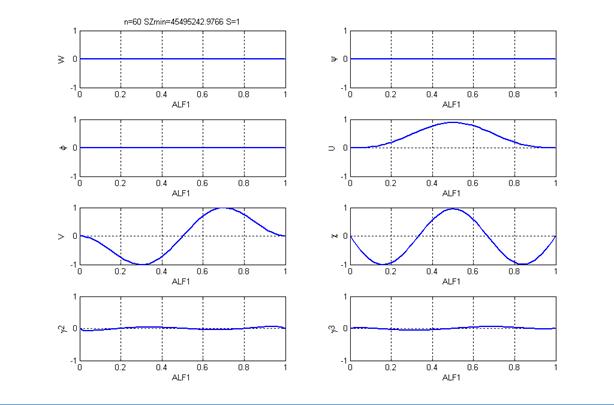
Рис.4.6
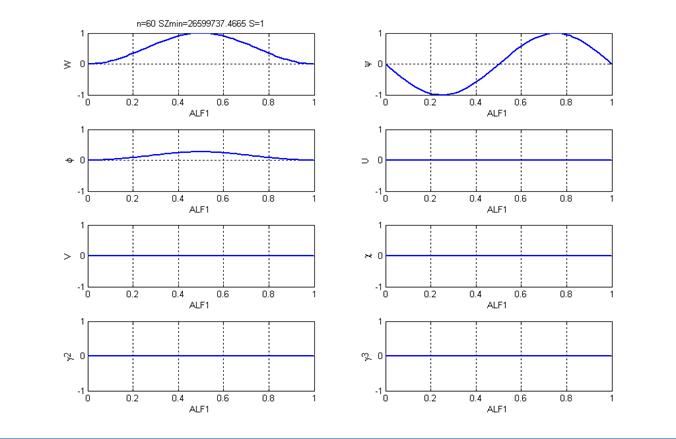
Рис.4.7
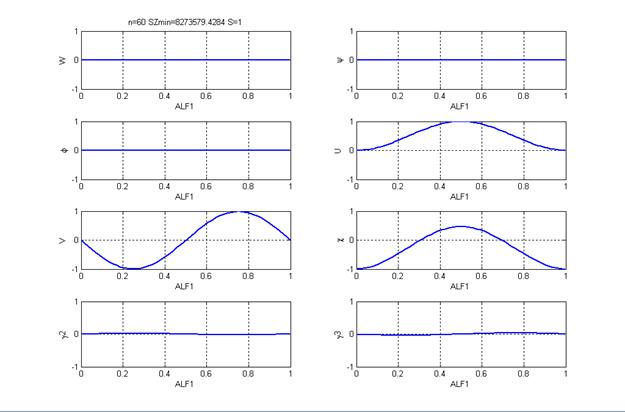
Рис.4.8

Рис.4.9
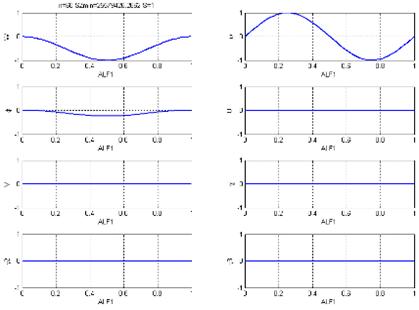
Рис.4.10
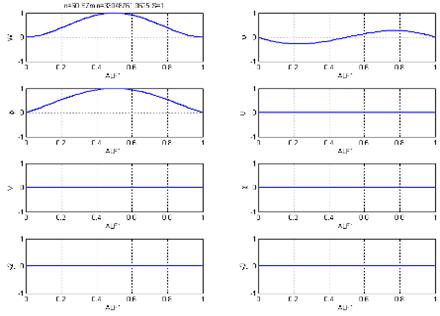
Рис.4.11
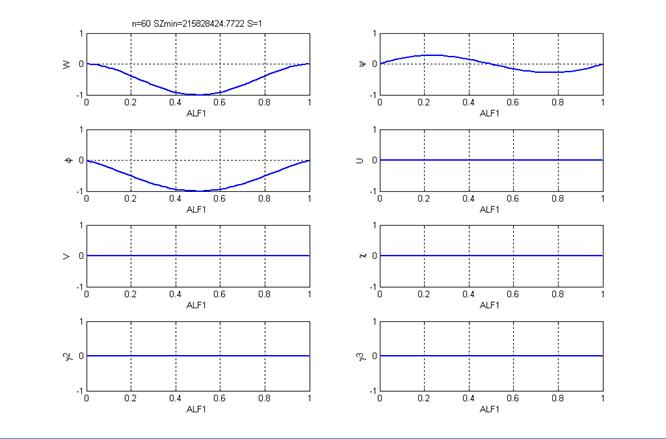
Рис.4.12
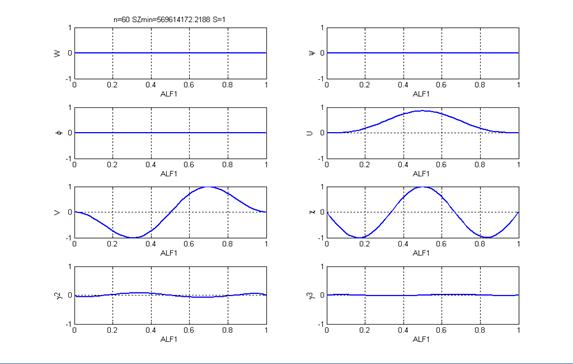
Рис.4.13

Рис.4.14

Рис.4.15
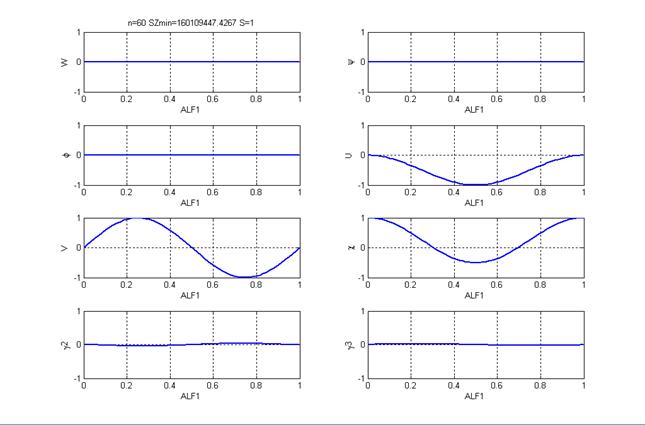
Рис.4.16
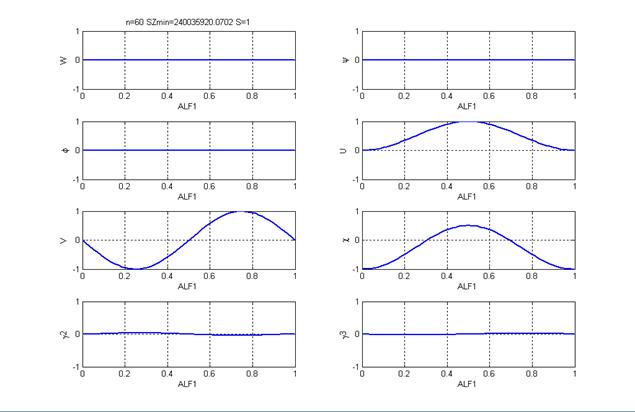
Рис.4.18

Рис.4.19

Рис.4.20
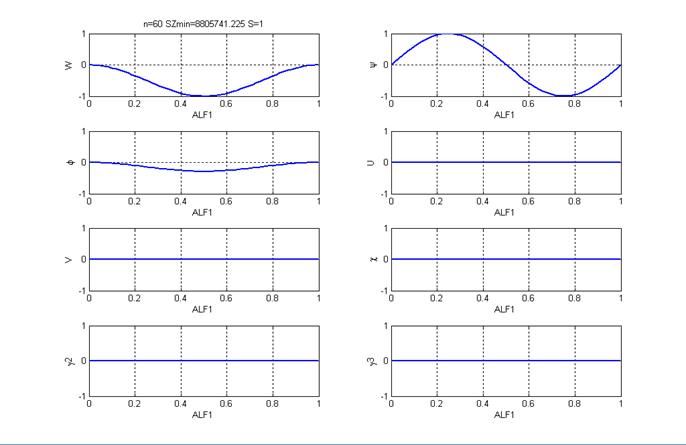
Рис.4.21
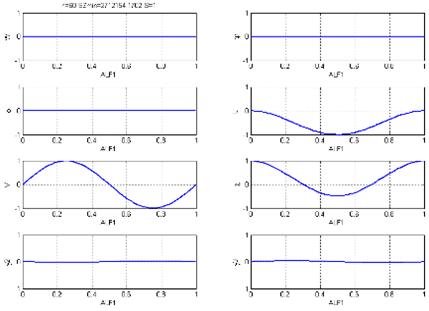
Рис.4.22
Рис.4.23
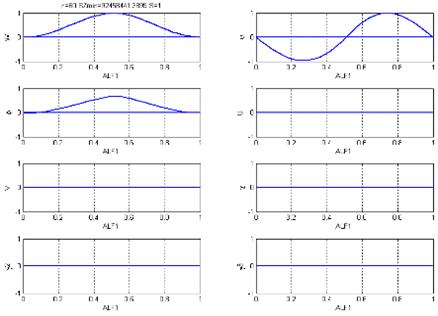
Рис.4.25
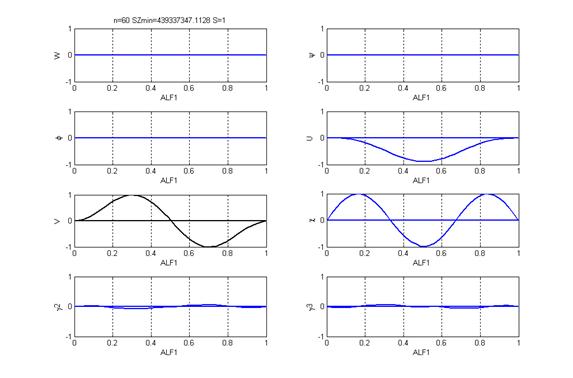
Рис.4.26

Рис.4.27
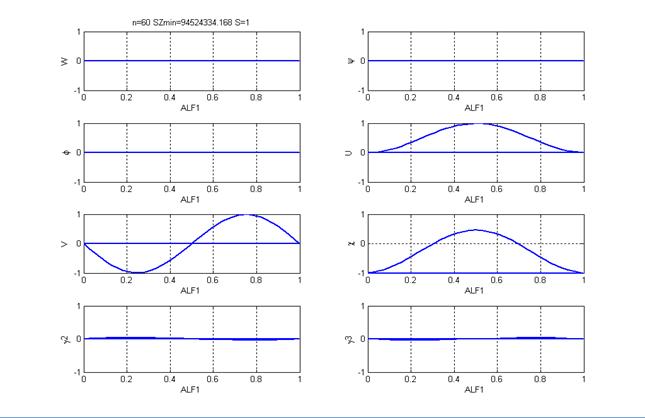
Рис.4.28
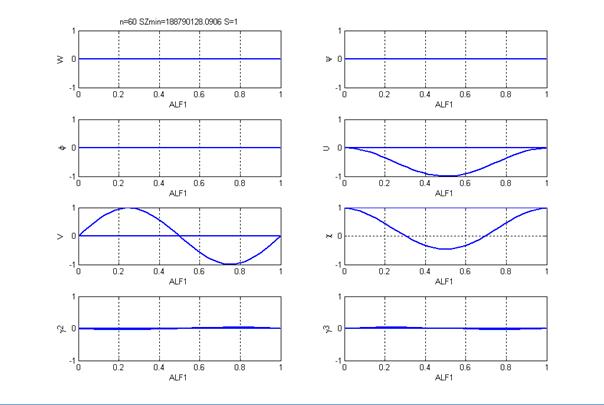
Рис.4.29
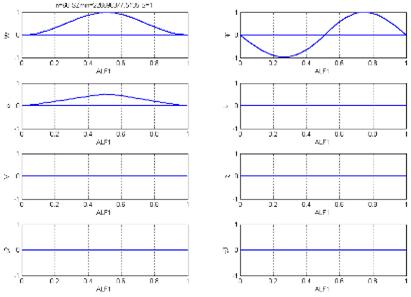
Рис.4.30
Сведём анализ графиков на
(рис.4.5-4.30) в таблицу. Пусть 
Таблица 4.4
|
Условия
нагружения и закрепление торцов
|
  
|
|
|
|
 жёсткое
защемление2,5·1064,5·1072,6·107 жёсткое
защемление2,5·1064,5·1072,6·107
|
|
|
|
|
|
цилиндр.шарнир
|
8,3·106
|
1,7·107
|
2,6·107
|
|
 жёсткое
защемление3,3·1072,2·1085,7·107 жёсткое
защемление3,3·1072,2·1085,7·107
|
|
|
|
|
|
цилиндр.шарнир
|
3,3·107
|
1,6·108
|
5,7·107
|
|
 жёсткое
защемление4·1061,5·1078,8·106 жёсткое
защемление4·1061,5·1078,8·106
|
|
|
|
|
|
цилиндр.шарнир
|
2,7·106
|
5,4·106
|
8,4·106
|
|
 жёсткое
защемление9,2·1074,4·1082,2·108 жёсткое
защемление9,2·1074,4·1082,2·108
|
|
|
|
|
|
цилиндр.шарнир
|
9,5·107
|
1,9·108
|
2,3·108
|
Проведённые численные исследования
показывают, что минимальные значения параметра нагрузки  ,определяемые
численным решением уравнений (3.4) получаются, когда круговое полукольцо при
переходе в возмущенное состояние превращается в «восьмёрку». Это показано на
графиках (рис.4.5, 4.8, 4.11, 4.15, 4.19, 4.22, 4.25, 4.28). Эти значения для
полукольца с параметрами
,определяемые
численным решением уравнений (3.4) получаются, когда круговое полукольцо при
переходе в возмущенное состояние превращается в «восьмёрку». Это показано на
графиках (рис.4.5, 4.8, 4.11, 4.15, 4.19, 4.22, 4.25, 4.28). Эти значения для
полукольца с параметрами  ,
,  приведены в
таблице 4.4. Видно, что при (т.е квадратном поперечном сечении
стержня) полукольцо в возмущённом состоянии изгибается в направлении
перпендикулярном своей плоскости. И при этом значение параметра меньшее, чем
при потери устойчивости полукольца в своей плоскости.
приведены в
таблице 4.4. Видно, что при (т.е квадратном поперечном сечении
стержня) полукольцо в возмущённом состоянии изгибается в направлении
перпендикулярном своей плоскости. И при этом значение параметра меньшее, чем
при потери устойчивости полукольца в своей плоскости.
Следовательно, для реализации
плоской изгибно-сдвиговой ФПУ в направлении, перпендикулярном плоскости кольца,
(т.е. в направлении оси ), для
поперечного сечения полукольца необходимо обеспечить значительно большую
изгибную жёсткость, чем в направлении оси , особенно в случае, когда сдвиговая
жёсткость  намного
меньше единицы, и кольцо обладает малой крутильной жёсткостью
намного
меньше единицы, и кольцо обладает малой крутильной жёсткостью  . Данный
вывод является весьма принципиальным, т.к. при проектировании реальных
конструкций для шпангоутов всегда обеспечивают выполнение параметра
. Данный
вывод является весьма принципиальным, т.к. при проектировании реальных
конструкций для шпангоутов всегда обеспечивают выполнение параметра  ,
предполагая, что при действии нагрузки они теряют устойчивость только по
плоской изгибной форме. Необходимо, правда, отметить, что данный вывод касается
только изолированных колей, т.к. в реальных конструкциях шпангоуты не бывают
изолированными и возможность из потери устойчивости по описаны выше формам
определяется также и жесткостями соединяемых с ними других элементов
конструкций в направлениях осей
,
предполагая, что при действии нагрузки они теряют устойчивость только по
плоской изгибной форме. Необходимо, правда, отметить, что данный вывод касается
только изолированных колей, т.к. в реальных конструкциях шпангоуты не бывают
изолированными и возможность из потери устойчивости по описаны выше формам
определяется также и жесткостями соединяемых с ними других элементов
конструкций в направлениях осей  , и .
, и .
Глава 5. Безопасность и
экологичность проекта
При создании сложных
автоматизированных систем управления все чаще практикуют системное
проектирование, на ранних стадиях которого поднимаются вопросы эргономического
обеспечения, носящего в себе большие резервы повышения эффективности и
надежности всей системы. Это связано с всесторонним учетом человеческого
фактора в процессе проектирования. Основной задачей эргономического обеспечения
является оптимизация взаимодействия между человеком и машиной не только в
период эксплуатации человеко-машинных систем, но и при изготовлении и даже
утилизации технических компонентов. Это достигается в результате проведения и
выполнения комплекса взаимоувязанных по значению, логике и последовательности
эргономических процедур и мероприятий, осуществляемых в ходе разработки системы
человек-машина и при ее эксплуатации.
Охрана труда - это система
законодательных актов, социально - экономических и лечебно-профилактических
мероприятий и средств, обеспечивающих безопасность, сохранения здоровья и
работоспособности человека в процессе труда.
.1 Электробезопасность
В соответствии с ГОСТ 12.1.019-796
под электробезопасностью понимают систему организационных и технических
мероприятий и средств, обеспечивающих защиту людей от вредного и опасного
воздействия электрического тока, электрической дуги и статического
электричества. В отличие от других источников опасности электрический ток
нельзя обнаружить без специального оборудования и приборов, поэтому воздействие
его на человека чаще всего неожиданно.
Значение силы тока, проходящего
через организм человека, зависит от напряжения под которым находится человек и
от сопротивления участка тела к которому приложено это напряжение. Учитывая,
что большинство поражений происходит при напряжении 127, 220 и 380 В, а пробой
кожи начинается при напряжении 40-50 В, в качестве безопасного напряжения
переменного тока в нашей стране выбрано 42 В, 110 В для постоянного тока.
Основными причинами
электротравматизма являются:
случайное прикосновение к
токоведущим частям, в результате ведения работ вблизи или на этих частях;
неисправность защитных средств, которым пострадавший прикасался к токоведущим
частям; ошибочное принятие находящегося под напряжением оборудования как
отключенного;
неожиданное возникновение напряжения
из-за повреждения изоляции там, где в нормальных условиях его быть не должно;
контакт токопроводящего оборудования с проводом, находящимся под напряжением;
замыкание фаз на землю и тому подобное;
появление напряжения на токоведущих
частях оборудования в результате ошибочного включения тогда, когда на нем
выполняют работу; замыкание между отключенными и находящимися под напряжением
проводами; наведение напряжения от соседних работающих установок и так далее.
В машинных залах ВЦ при проведении
наладочных и профилактических работ есть опасность поражения персонала
электрическим током.
Отметим технические средства,
обеспечивающие безопасность работ на электроустановках.
. Защитное заземление. Защитным
заземлением называют пренамеренное электрическое соединение с землей или ее
эквивалентом металлических нетоковедущих частей, которые могут оказаться под
напряжением. Электроустановки необходимо заземлять во всех случаях при
переменном токе - 380 В и выше, постоянном токе - 440 В и выше. В помещениях с
повышенной переменного тока -42 В, постоянного -110 В.
. Зануление. Это средства
заключается в преднамеренном электрическом соединении с нулевым защитным
проводником металлических нетоковедущих частей, которые могут оказаться под
напряжением. Зануление применяют в четырехпроводных сетях с глухозаземленной
нейтралью напряжением до 1000 В.
. Выравнивание потенциалов. Для
снижения напряжений прикосновения и шага. Потенциалы выравнивают, как правило,
путем устройства контурных заземлителей.
. Защитное отключение. Защитное
отключение представляет собой быстродействующую защиту, обеспечивающую
автоматическое отключение электроустановки при возникновении в ней опасности
поражения человека электрическим током.
. Электрическое разделение сети. Это
разделение сети на отдельные электрически не связанные между собой участки о
помощью разделяющего резко снизить опасность поражения человека током за счет
уменьшения емкостной и активной проводимостей сети.
В инженерной проходит проводка, есть
лампы, ПЭВМ, следовательно оно относится к помещениям повышенной опасности.
Помещения по степени опасности
поражения током из-за характера окружающей среды делятся на классы:
-й класс - помещения с повышенной
опасностью - при наличии одного из условий:
а) сырость (относительная влажность
воздуха превышает 75%);
б) токопроводящая пыль;
в) токопроводящие полы (металлические,
земляные, железобетонные, кирпичные и др.):
г) температура воздуха выше +35°С
(помещения с сушилками, котельные и т.д.);
д) возможность одновременного
прикосновения человека к металлическим корпусам электрооборудования и к
соединенным с землей металлоконструкциям здания, технологическим аппаратам,
механизмам;
-й класс - особо опасные помещения -
при наличии одного из условий:
а) особая сырость (влажность близка
к 100%, при этом потолок, стены, пол и предметы покрыты влагой);
б) химически активная среда (т. е.
агрессивные пары, газы, жидкости) или органическая среда, образующая отложения
и плесень, разрушающие изоляцию и токоведущие части электрооборудования;
в) одновременно два и более условия
повышенной опасности;
-й класс - помещения без повышенной
опасности - при отсутствии условий повышенной или особой опасности.
Помещение оператора ЭВМ относится к
третьему классу пожарной безопасности.
.2 Пожарная безопасность
Под пожарной охраной понимают
систему государственных и общественных мероприятий, направленных на охрану от
огня людей и собственности.
Пожарная безопасность помещений,
имеющих электрические сети, регламентируется ГОСТ 12.1.033-81, ГОСТ
12.1.004-85. Работа оператора ЭВМ должна вестись в помещении, соответствующем
категории Д пожарной безопасности (негорючие вещества и материалы в холодном
состоянии). Огнестойкость здания по СНиП 2.01.02-85 соответствует I степени
(стены выполнены из искусственного или натурального камня и являются несущими,
в перекрытиях здания отсутствуют горючие материалы).
ЭВМ нельзя располагать вблизи
источников тепла или термоизлучателей, на экраны дисплеев не должны падать
прямые солнечные лучи. Устанавливать ЭВМ необходимо так, чтобы задняя и боковые
стенки отстояли не менее чем на 0.2м от других предметов. Для соблюдения
теплового режима в корпусе ЭВМ предусмотрены вентиляционные отверстия и
охлаждающий вентилятор. Внутренний монтаж выполнен проводом с повышенной
теплостойкостью.
Противопожарная защита помещения
обеспечивается применением автоматической установки пожарной сигнализации
(ПС-Л1), наличием средств пожаротушения, применением основных строительных
конструкций здания с регламентированными пределами огнестойкости, организацией
своевременной эвакуации людей, применением средств коллективной и индивидуальной
защиты людей.
Организационно-технические
мероприятия должны включать организацию обучения служащих правилам пожарной
безопасности.
Для этого необходимо установить к
какой категории пожароопасности относится помещение. Так как в помещении нет
электроустановок, не используется горючие смеси и легковоспламеняющиеся
вещества оно относится к категории А, то есть в помещении находятся предметы из
материалов, при горении которых образуется уголь. Для этой категории в качестве
огнетушащих средств лучше всего подходит вода и пена, затем порошок ПФ, еще
меньше CF2Br и, хуже всего порошок ПСБ и СО2 . Теперь примерно определим
количество средств пожаротушения. Для вычислительных центров, машинно - счетных
станций, производственно - конструкторских бюро площадью до 100 м2 используются
углекислотные ручные огнетушители, пенные, химические, воздушно - пенные,
жидкостные огнетушители и асбестовая кошма размерами 1 × 1 м, 2 × 1,5 м, 2 × 2 м. Для
помещения площадью 62 м2 необходимо иметь: 1 порошковый огнетушитель (ОУП-5).
Нормы оснащения помещений
огнетушителями
|
Категория
помещения (по НПБ 105-95)
|
Предельная
защищаемая площадь, м2
|
Порошковые
огнетушители вместимостью, 10 л
|
|
А
|
200
|
1
|
S = 62 м2;= S/200 = 62/200 = 0,31
Принимаем 1 огнетушитель в помещение.
.3 Построение дерева отказов
Количественную меру исходных событий выбирают из
имеющейся статистики о надежности элементов, технических систем, об отказов.
Что касается неправильных действий и ошибок человека - оператора, то
количественную меру ошибок выбирают, исходя из анализа произошедших случаев
травматизма, аварий и т.д. Количественную меру тех или иных исходных событий
можно получить и из статики о подобных или таких же событиях, путем анализа
схожих ситуаций, проведенных экспертных оценок.
Определив вероятность реализацию первичных
событий, проводят вычисление вероятности наступления завершающего события по
всем самостоятельным ветвям.
Для статистически независимых событий при
логической схеме «или» вероятность появления завершающего, выходного события в
общем случае имеет вид:
 ,
,
где  - вероятность реализации выходного
события,
- вероятность реализации выходного
события,
 - вероятность появления i - го
входного события, n- число входов.
- вероятность появления i - го
входного события, n- число входов.
Если имеется схема с двумя выходами:
а и b -статистические независимые события, то вероятность появления выходного
события имеет вид:
 .
.
Если произведение  очень мало,
то полученное выражение (2) приближенно можно записать:
очень мало,
то полученное выражение (2) приближенно можно записать:

В случае схемы «или» с n выходами
можно использовать приближенные соотношения:

Это приближенное выражение дает
хорошие результаты, если вероятности появления элементарных событий  ,
,  ,
,  ... очень
малы и дает точный результат, если все события a, b, с ... являются
несовместимыми.
... очень
малы и дает точный результат, если все события a, b, с ... являются
несовместимыми.
В случаи схемы «и» для n
статистически независимых входных событий определяется по правилу умножения
вероятностей:

Таким образом, используя соотношения
(1) - (5) для дерева отказов любой протяженности, можно вычислить вероятность
наступления головного события, исходя из имеющейся вероятности первичных событий.
Определение количественной меры безопасности (опасности) с использованием
дерева отказов покажем на примере.
Дерево отказов, построенное для
случая поражения человека электрическим током показано на (рис.5.1)

Рис.5.1
5.4 Требования к уровням шума и
вибрации
Возникает вопрос о влиянии помех на
оператора и характеристиках его «помехоустойчивости». С точки зрения
воздействий на оператора помехи могут быть различны. Одни из них постоянны и
действуют в течение всего рабочего дня, другие случайны.
Оптимальные показатели уровня шумов
в рабочих помещениях конструкторских бюро, кабинетах расчетчиков, программистов
определяются по ГОСТ 12.1.003-83 [6].
Характеристики постоянного шума -
уровни звукового давления в децибелах в октавных полосах со
среднегеометрическими частотами в герцах приведены в таблице
|
Уровень,
дБ
|
63
|
152
|
250
|
500
|
1000
|
2000
|
4000
|
8000
|
|
Частота,
Гц
|
71
|
61
|
54
|
49
|
45
|
42
|
40
|
38
|
Уровни звукового давления в октавных полосах.
Допустимый уровень шума при умственном труде,
требующем сосредоточенности- 50дБ. Для уменьшения шума и вибрации в помещении
оборудование, аппараты и приборы устанавливаются на специальные фундаменты и
амортизирующие прокладки. Если стены и потолки помещения являются источниками
шумообразования, они должны быть облицованы звукопоглощающим материалом.
Снижение шума в источнике излучения можно
обеспечить применением упругих прокладок между основанием машины, прибора и
опорной поверхностью. В качестве прокладок используется резина, войлок, пробка,
различной конструкции амортизаторы. Под настольные шумящие аппараты, счетные,
перфорационные машины можно подкладывать мягкие коврики из синтетических
материалов, а под ножки столов, на которых они установлены, - прокладки из
мягкой резины, войлока толщиной 6-8 мм. Крепление прокладок возможно путем
приклейки их к опорным частям. Замена прокладок из резины производится через 4
- 5 лет, из войлока через 2 - 2.5 года.
Рациональная планировка помещения, размещение
оборудования в ВЦ является важным фактором, позволяющим снизить шум при
существующем техническом обеспечении ЭВМ. При планировке ВЦ машинный зал,
помещения с сервисным и тому подобным оборудованием необходимо располагать
вдали от шумящего или вибрирующего оборудования. Снижение уровней шума,
проникающего в производственные помещения извне, может достигнуто увеличением
звукоизоляции ограждающих конструкций.
Звукопоглощение является наиболее и
в то же время достаточно эффективным способом уменьшения шума в
производственных помещениях ВЦ. Способность материалов поглощать падающие на
них звуковые волны характеризуется коэффициентом звукопоглощения:  , где
, где  , и
, и  -
соответственно интенсивность поглощенной и падающей звуковых волн. При a = 1 вся звуковая волна
поглощается материалом и отраженная волна отсутствует.
-
соответственно интенсивность поглощенной и падающей звуковых волн. При a = 1 вся звуковая волна
поглощается материалом и отраженная волна отсутствует.
Наряду со звукопоглощающим
облицовками применяют объемные (штучные) звукопоглотители (их применение
целесообразно, когда не хватает облицовочной площади). Они представляют собой
геометрические тела объемной формы, либо целиком состоящие из звукопоглощающих
материалов, либо состоящие из акустических прозрачных оболочек, заполненных
звукопоглощающим материалом.
.5 Пыль и вредные химические
вещества
К ядовитым газовым примесям
атмосферного воздуха относят:
оксид углерода (II) - угарный газ
(ПДК - 20 мг/м3);
сероводород (ПДК - 10 мг/м3);
аммиак (ПДК - 20 мг/м3);
выхлопные газы автомобилей и так
далее.
Помимо газов в воздухе могут
находиться мельчайшие частицы твёрдого вещества размерами от тысячных долей до
одного миллиметра. Загрязнение воздуха пылью ухудшает санитарно-гигиенические
условия труда. Такой воздух может стать причиной ряда болезней.
В целях борьбы с пылью и
загрязнением в рабочем помещении каждый день должна проводится влажная уборка.
.6 Микроклимат
Наиболее значительным фактором
производительности и безопасности труда является производственный микроклимат,
который характеризуется температурой и влажностью воздуха, скоростью его
движения, а также интенсивностью радиации, и должен соответствовать ГОСТ
12.1.005-88 и СНиП 2.04.05-86 .
|
Параметры
микроклимата
|
Значения
параметров
|
|
Зимой
|
летом
|
|
1.
Температура, °C
|
22-24
|
23-25
|
|
2.
Скорость воздушных масс, м/с
|
0.1
|
0.1-0.2
|
|
3.
Относительная влажность, %
|
40-60
|
40-60
|
Требования к параметрам микроклимата в
производственном помещении.
Относительная влажность в пределах 40 - 60% мало
сказывается на состоянии человека. При влажности 99 - 100% практически
выключается регулирующий механизм потоотделения и быстро наступает
перегревание.
В помещениях предполагающих эксплуатацию системы
требования к параметрам микроклимата в целом выполнены.
Особенно большое влияние на микроклимат
оказывают источники теплоты, существующие в помещениях ВЦ, основными из которых
являются:
ЭВМ и вспомогательное оборудование, приборы
освещения и обслуживающий персонал. Нужно учитывать и внешние источники
теплоты.
Наибольшее количество теплоты выделяют ЭВМ и
вспомогательное оборудование. Так, в машинном зале ЭВМ средняя величина тепловыделений
на 1 м2 пола составляет 310 Вт/м2; в помещении подготовки данных - 125 Вт/м2,
Тепловыделения от приборов освещения также велики. Удельная величина
тепловыделений составляет 35 - 60 Вт/м2. При этом, чем больше уровень
освещенности в помещении ВЦ, тем выше удельные величины тепловыделений.
Количество теплоты от обслуживающего персонала ВЦ незначительно. Оно зависит от
числа работающих в помещении, микроклиматических условий и интенсивности
работы, выполняемой человеком.
Климатические условия являются важным фактором
надежной работы средств вычислительной техники и высокой работоспособности
обслуживающего персонала.
С целью обеспечения комфортных условий для
обслуживающего персонала и высокой надежности технологического процесса в ВЦ СН
512 -78 устанавливает следующие требования к воздушной среде производственных
помещений ВЦ. Так, в машинном зале температура воздуха должна быть 20±2 С.
Относительная влажность воздуха рекомендуется 55 ±5%.
Организация вентиляции в машинном зале ВЦ
является сложной задачей в связи с большими тепловыделениями (до 140 Вт/м2 зала
и более), большими кратностями воздухообменов (30 - 90 1/ч) и сложным
распространением конвективных и струйных потоков в объеме машинного зала. При
организации воздухообмена стремятся к тому, чтобы приточный воздух кратчайшим
путем поступал в стойки ЭВМ и рабочую зону, а нагретый удалялся через вытяжные
отверстия также по возможно кратчайшему пути, минимально задевая рабочую зону
машинного зала.
Работа инженера относится к категории легких
работ - энергозатраты организма до 172 ккал/час. Характеристика работы:
производимая сидя, стоя и связанная с ходьбой, но не требующая систематического
физического напряжения.
При естественной вентиляции воздух поступает в
помещение и удаляется из него вследствие разности температур, а также под
действием ветра. Аэрация - это организованная естественная вентиляция,
выполняющая роль общеобменной.
.7 Эргономические принципы при создании ПО АСУ
) Принцип минимального рабочего усилия.
Человек-оператор (ЧО) должен выполнять только ту
работу, которая необходима, но не может быть выполнена системой. Не должно быть
повторения уже сделанной работы. Данный аспект предъявляет соответствующие
требования и к рабочей документации. Она должна обладать доступностью,
полнотой, целенаправленностью на решение определенной задачи или комплекса
задач; структурированностью.
) Принцип максимального взаимопонимания.
Система обеспечивает полную поддержку
пользователю, то есть ЧО не должен заниматься поиском информации; выдаваемая на
видеоконтрольное устройство информация не требует интерпретации или
перекодировки.
) Принцип минимального объема оперативной памяти
пользователя.
От ЧО требуется, чтобы он запоминал как можно
меньше. Это объясняется тем, что скорость переработки информации оператором и
его пропускная способность ограничены. На них влияет множество факторов,
начиная от качества средства взаимодействия человека с техническими средствами
АСУ и всей информационной моделью и кончая уровнем напряженности операторской
деятельности и общим психофизическим состоянием человека.
) Принцип минимального расстройства
человека-оператора.
Расстройство пользователя (производственные
причины), может возникнуть:
из-за какого-то препятствия в решении
поставленной задачи;
из-за появления и обнаружения ошибок.
) Принцип учета профессиональных навыков
пользователя.
В процессе эргономического обеспечения системы
на ранних этапах проектирования предусматриваются и проводятся мероприятия,
учитывающие облик некоторого абстрактного человека, который планируется
разработчиками к взаимодействию с компонентами системы.
) Принцип максимального различия человеческих
характеров.
Мышления людей, их характеры различны, поэтому
терминальная информация от системы по-разному может восприниматься
пользователями. Поэтому целесообразно, чтобы система содержала, к примеру,
способы как наглядного, так и слухового воздействия на конкретного ЧО,
различимые пользователем.
) Принцип максимального контроля со стороны
человека-оператора.
Данный принцип можно охарактеризовать следующими
требованиями к функционированию ЧО:
пользователь должен иметь возможность изменить
очередность обработки, выполняемой системой;
пользователь должен контролировать
последовательность работы и особенно там, где нет последовательно определенных
операций;
пользователь должен иметь возможность создавать
свои программные модули и хранить их в памяти системы для использования в
будущем.
5.8 Эргономические требования к системам
отображения информации
Эргономические требования определяют необходимые
параметры яркостных, временных и пространственных характеристик зрительной
информации.
Оценка яркостного режима включает нормирование
уровня яркости, ее перепадов в поле зрения наблюдателя для достижения требуемых
показателей эффективности обработки зрительной информации. Оптимальным
считается такое значение уровня яркости, при котором обеспечивается
максимальное проявление конкретной чувствительности. При установке оптимального
диапазона яркостей, находящихся в поле зрения оператора, необходимо обеспечить
перепад яркостей, близкий к уровню адаптации.
Максимально допустимый перепад яркостей в поле
зрения оператора не должен превышать 1:100. Оптимальными же являются
соотношения 20:1 между источником света и ближайшим окружением и 40:1 между
самым светлым и самым темным участками изображения. Контрастность изображения
снижается при внешнем освещении тем значительнее, чем ниже яркость экрана и чем
больше яркость, создаваемая освещением. Контраст между системой отображения
информации и его непосредственным окружением не должен превышать соотношения
3:1.
Средства отображения информации отвечают
следующим техническим требованиям:
яркость свечения экрана не менее 100 Кд/м2;
минимальный размер точки растра не более 0.6 мм
для цветного монитора;
контрастность изображения не менее 0.8;
частота регенерации изображения в текстовом
режиме не менее 72 Гц;
количество точек растра на строку не менее 640;
наличие антибликового покрытия экрана;
размер экрана не менее 31 см по диагонали;
высота символов на экране не менее 3.8 мм;
расстояние от глаз оператора до экрана 40-80 см;
монитор должен быть оборудован поворотной
подставкой, позволяющей перемещать его в горизонтальной и вертикальной в
пределах 130-200 мм и изменять угол наклона экрана на 10-15°.
.9 Описание зрительной работы оператора
Качество зрительного восприятия определяется
энергетическими, пространственными и временными характеристиками сигналов,
поступающих к оператору. В соответствии с названными характеристиками сигналов
выделяются группы основных параметров зрительного анализатора:
энергетические - диапазон воспринимаемых
яркостей, контраст, слепящая яркость;
пространственные - острота зрения, поле зрения,
объем восприятия;
временные - латентный период реакции, время
адаптации, критическая частота мельканий.
) Энергетические параметры.
При практических расчетах для повышения
надежности проектируемых систем «человек-машина» рекомендуется исходить из
максимального порога чувствительности, равного 5,2 ×
10-6 Кд/м2.
Субъективная оценка яркостей воспринимаемого
сигнала зависит от яркости окружающего фона, поэтому для практических целей
используется относительный порог (порог контрастной чувствительности).
Различают прямой контраст, рассчитываемый для светлого объекта на темном фоне,
и обратный контраст - для светлого объекта на темном фоне. Для нормальной
работы зрительного анализатора значение контраста должно находиться в диапазоне
от 0.65 до 0.95.
) Пространственные параметры.
Пространственные характеристики зрительного
анализатора определяются воспринимаемыми глазом размерами предметов и их
местоположением в пространстве. В эти группы включают остроту зрения, поле
зрения, объем зрительного восприятия.
Поле зрения определяется при фиксированном
взгляде как пространство в пределах которого возможна проекция изображения на
сетчатку глаза. Оно зависит от возможностей оптической системы глаз, площади и
характера распределения фоторецепторов, выступающих частей лица. Условно поле
зрения можно разбить на три зоны:
центрального зрения (размером 4°-7°,
соответствующим желтому пятну сетчатки), где возможно наиболее четкое
различение деталей;
ясного видения (30°-35°),
где при неподвижном глазе можно распознать предмет без различных мелких
деталей;
периферического зрения (75°-90°),
где предметы обнаруживаются, но не распознаются.
Зона периферического зрения играет важную роль в
ориентации во внешней обстановке. Объекты, попавшие в эту зону, могут быть
быстро перемещены в зону ясного видения с помощью установочных движений глаз.
Объем восприятия определяется числом объектов
наблюдения, которое может охватить оператор в течение одной зрительной
фиксации. При предъявлении человеку не связанных между собой объектов
наблюдения объем восприятия составляет 4-8 элементов.
) Временные параметры.
Временные характеристики зрительного анализатора
определяются временем, необходимым для возникновения зрительного ощущения при
определенных условиях работы оператора. В группу этих характеристик входят:
латентный (скрытый) период зрительной реакции, длительность инерции ощущения,
критическая частота мельканий, время адаптации.
Длительность инерции ощущения определяется
интервалом времени между моментом окончания воздействия раздражителя и моментом
исчезновения зрительного ощущения, то есть это время сохранения воздействия
света на сетчатку после окончания этого воздействия. Оно зависит от яркости и
угловых размеров объекта. Если возникает необходимость в последовательном
реагировании оператора на дискретно появляющиеся сигналы, то период их
следования должен быть равен не меньше времени сохранения ощущения (равного 0.2
- 0.5 с).
Время адаптации определяется ее видом и
находится в пределах от нескольких секунд до нескольких минут при световой
адаптации и десятков минут при темновой. Яркость поля адаптации определяет вид
освещения:
ночное (менее 0.01 Кд/м2);
сумеречное (от 0.01 до 10 Кд/м2);
дневное (более 10Кд/м2).
Им соответствует ночное, сумеречное, дневное
зрение.
.10 Эргономическое обеспечение рабочего места
оператора ЭВМ
Дисплей. Положение тела обычно соответствует
направлению взгляда; дисплей, расположенные слишком низко или под неправильным
углом, являются основными причинами появления сутулости. Расстояние от дисплея
до глаз должно лишь немного превышать привычные для вас расстояние между книгой
и глазом.
Кресло. Формы спинки кресла должна повторять
формы вашей спины. Устанавливать кресло надо на такой высоте, чтобы не
чувствовать давление на кобчик (кресло расположено слишком низко) или на ребра
(кресло расположено слишком высоко). Специалисты по эргономики считают, что
угол между бедрами и позвоночником должен составлять 90 градусом, однако
недавно проведенные исследования показали, что большинство людей предпочитают
сидеть слегка откинувшись.
Клавиатура. Ваши руки должны располагаться так,
чтобы они находились на расстояние нескольких сантиметров от туловища.
Установите кресло и клавиатуру так, чтобы вам не надо было далеко тянуться. При
изменение положения тела (например, с вертикального на наклонное), обязательно
переменное положение клавиатуры и дисплея. В этом случае может оказаться
полезной регулируемая подставка клавиатуры, благодаря которой можно без всякого
напряжения работать о манипулятором «мышь». Но можно поставить клавиатуру и на
колени, в перспективе использования «переламываемой клавиатуры», которая хотя
бы частично облегчает болевые ощущения в плече.
Рабочий стол. Удобная высота стола особенно
важно в том случае, когда на нем располагается клавиатура. Если у вашей
клавиатуры отсутствует подставка, а высоту стола нельзя изменить, и он слишком
высок, то постарайтесь повыше скамеечку или что - то другое. Если стол слишком
низок, то подставьте что - ни будь под ножки. Рекомендуемая высота стола 58 -
71 см,
Оригиналодержатель. Если при работе часто
приходится смотреть на документы, установите подставку с оригиналом документа в
одной плоскости с экраном и на одной высоте с ним. Если надо чаще смотреть на
оригинал, чем на экран, поверните свое кресло или экран таким образом, чтобы
прямо перед вами располагался оригинал, а не экран компьютера.
Рабочее место оператора организовано в
соответствии с требованиями стандартов и технических условий по безопасности
труда.
При взаимном расположении элементов рабочего
места учитывается:
рабочая поза человека - оператора;
пространство для размещения оператора,
позволяющее осуществлять все необходимые движения;
физические, зрительные и слуховые связи между
оператором и оборудованием;
возможность обзора пространства за пределами
рабочего места;
возможность ведения записей, размещения
документации и материалов, используемых оператором.
Конструктивное и внешнее оформление оборудования
создает условия для минимальной утомляемости. Конструкция рабочей мебели должна
обеспечивать возможность индивидуальной регулировки соответственно росту
работающего для поддержания удобной позы и соответствовать требованиям ГОСТ
12.2.032-78 [9], ГОСТ 22269-76 [10]. При правильной организации рабочего места
производительность труда операторов ЭВМ увеличивается на 8-20%.
Рис. 5.2. Схема рабочего места

Рис.5.3. Зоны досягаемости моторного
поля тела человека.
Рис. 5.4. Зоны досягаемости и
оптимальной зоны моторного поля.
Для снижения нагрузки на глаза,
дисплей должен быть установлен наиболее оптимально с точки зрения эргономики:
верхний край дисплея должен находится на уровне глаз, а расстояние до экрана
должно составлять от 28 до 60см. Мерцание экрана должно происходить с частотой
fмер>70 Гц.
.11 Освещение производственных
помещений ВЦ
Основная задача освещения на
производстве - создание наилучших условий для видения. Эту задачу возможно
решить только осветительной системой, отвечающей следующим требованиям:
. Освещенность на рабочем месте
должна соответствовать характеру зрительной работы.
. Необходимо обеспечить достаточно
равномерное распределение яркости на рабочей поверхности, а также в пределах
окружающего пространства.
. На рабочей поверхности должны
отсутствовать резкие тени.
. В поле зрения должна отсутствовать
прямая и отраженная блескость.
. Величина освещенности должна быть
постоянной в течение всего времени.
. Следует выбирать оптимальную
направленность светового потока.
. Следует выбирать необходимый
спектральный состав света. Приведем расчет искусственного освещения. Размеры
комнаты: А = 10 м (длина комнаты), В = 6 м (ширина), Н = З м (высота).
Используем потолочные светильники
типа УСП-35 с двумя люминесцентными лампами ЛБ-40. Коэффициент отражения
светового потока  =70%, стен
=70%, стен  = 50%, пола
= 50%, пола  = 10%.
= 10%.
Определить: число светильников при
общем равномерном освещении.= Н - 0,8 - высота рабочей поверхности, h = 3 - 0,8
= 2,2 м.
У светильников УСП-35
x
= 1,3 - 1,4; x = L/h,
где L - расстояние между рядами
светильников, - высота подвеса над рабочей поверхностью,
тогда L = x × h = 1,4 × 2,2 » 3 м.
Располагаем светильники вдоль
длинной стороны помещения. При ширине помещения 6 м имеем число рядов n = В/L =
2. Норма освещенности на рабочем месте Е = 400 лк.
Геометрический размер помещения:
 м.
м.
Коэффициент использования светового
потока (из таблиц) h = 0,45.
Номинальный световой поток лампы
ЛБ-40 Фл = 3120 лм.
Тогда, световой поток светильника
Фсв < 2Фл = 6240лм.
Определяем необходимое число
светильников:
= (E×Kз×S×z)/(n×Фсв×h×g),
где E - нормируемая минимальная
освещенность, лк;
Кз - коэффициент запаса, учитывающий
запыление и износ источников света, Кз = 1,4-1,5;- освещаемая площадь, м2;-
коэффициент неравномерности освещения, z = 1.1 -1.2;
п - число рядов светильников; п =2,
Фсв - номинальный световой поток
светильника, лм;
h
- коэффициент использования излучаемого светильника светового потока;
g
- коэффициент затенения, g = 0,8 -
0,9.
Тогда:
 .
.
Так как светильники располагаются в
два ряда, выбираем количество светильников 10 штук.
Длина светильника УСП-35 с лампами
ЛБ-40 1-1,27м.

Рис.5.5
Допускается установка светильников
местного освещения для подцветки документов. Местное освещение не должно
создавать блики на поверхности экрана и увеличивать освещение экрана более 300
лк.
Освещенность на рабочем месте должна
соответствовать зрительным условиям труда согласно гигиеническим нормам. Так, в
соответствии с ГОСТ 12.1.006-84 [11], освещенность при работе с дисплеем должна
быть 200 лк, а в сочетании с работой с документами - 400 лк.
Светильники местного освещения
должны иметь не просвечивающий отражатель с защитным углом не менее 40°.
.12 Электромагнитное воздействие
Электромагнитное поле - область
распространения электромагнитных волн. Электромагнитное поле характеризуется
частотой излучения f, Гц, или длиной волны λ, м.
Электромагнитная волна
распространяется в воздухе со скоростью света с = 300 000 км/с , и связь между
длиной и частотой электромагнитной волны определяется зависимостью λ = с/f.
К источникам ЭМП на производстве
относятся:
изделия, специально созданные для
излучения электромагнитной энергии: радио- и телевизионные вещательные станции,
радиолокационные установки, физиотерапевтические аппараты, системы радиосвязи,
технологические установки в промышленности;
устройства, не предназначенные для
излучения электромагнитной энергии в пространство, но в которых при работе
протекает электрический ток: системы передачи и распределения электроэнергии
(линии электропередачи, трансформаторные и распределительные подстанции) и
приборы, потребляющие электроэнергию (электродвигатели, электроплиты,
холодильники, телевизоры и т.п.).
Электростатические поля создаются в
энергетических установках и при электротехнических процессах. В зависимости от
источников образования они могут существовать в виде собственно
электростатического поля (поля неподвижных зарядов) или стационарного
электрического поля (электрическое поле постоянного тока).
В промышленности ЭСП широко
используются для электрогазоочистки, электростатической сепарации руд и
материалов, электростатического нанесения лакокрасочных и полимерных
материалов.
Статическое электричество образуется
при изготовлении, транспортировке и хранении диэлектрических материалов, в
помещениях вычислительных центров, на участках множительной техники.
Электростатические заряды и создаваемые ими электростатические
поля могут возникать при движении
диэлектрических жидкостей и некоторых сыпучих материалов по трубопроводам.
Магнитные поля создаются
электромагнитами, соленоидами, установками конденсаторного типа, литыми и металлокерамическими
магнитами и другими устройствами.
В ЭМП различаются три зоны, которые
формируются на различных расстояниях от источника ЭМИ.
Первая зона - зона индукции (ближняя
зона) охватывает промежуток от источника излучения до расстояния, равного примерно
λ
/2п
= 1/6 λ.
В
этой зоне электромагнитная волна еще не сформирована и поэтому электрическое и
магнитное поля не взаимосвязаны и действуют независимо.
Вторая зона - зона интерференции
(промежуточная зона) располагается на расстояниях примерно от λ/2п до 2п λ. В этой зоне
происходит формирование электромагнитной волны и на человека действует
электрическое и магнитное поля, а также оказывается энергетическое воздействие.
Третья зона - волновая зона (дальняя
зона) располагается на расстояниях свыше 2пλ. В этой зоне электромагнитная
волна сформирована, электрическое и магнитное поля взаимосвязаны. На человека в
этой зоне воздействует энергия волны.
.13 Методы защиты от
электромагнитных полей
Общими методами защиты от
электромагнитных полей и излучений являются следующие:
уменьшение мощности генерирования
поля и излучения непосредственно в его источнике, в частности за счет
применения поглотителей электромагнитной энергии;
увеличение расстояния от источника
излучения;
уменьшение времени пребывания в поле
и под воздействием излучения;
экранирование излучения;
применение СИЗ.
Излучающие антенны необходимо
поднимать на максимально возможную высоту и не допускать направления луча на
рабочие места и территорию предприятия.
Для защиты от электрических полей
промышленной частоты необходимо увеличивать высоту подвеса фазных проводов
линий электропередач, уменьшать расстояние между ними и т.д. Путем правильного
выбора геометрических параметров можно снизить напряженность электрического
поля вблизи ЛЭП в 1,6... 1,8 раза.
Уменьшение мощности излучения
обеспечивается правильным выбором генератора, в котором используют поглотители
мощности (рис. 8.17), ослабляющие энергию излучения.
Поглотителем энергии являются
специальные вставки из графита или материалов из графита или углеродистого
состава, а также специальные диэлектрики.
Для сканирующих излучателей
(вращающихся антенн) в секторе, в котором находится защищаемый объект - рабочее
место, применяют способ блокирования излучения или снижение его мощности.
Экранированию подлежат либо источники излучения, либо зоны нахождения человека.
Экраны могут быть замкнутыми (полностью изолирующими излучающее устройство или
защищаемый объект) или незамкнутыми, различной формы и размеров, выполненными
из сплошных, перфорированных, сотовых или сетчатых материалов.
Отражающие экраны выполняют из
хорошо проводящих материалов, например стали, меди, алюминия толщиной не менее
0,5 мм из конструктивных и прочностных соображений.
Поглощающие экраны выполняют из
радиопоглощающих материалов. Естественных материалов с хорошей радиопоглощающей
способностью нет, поэтому их выполняют с помощью конструктивных приемов и
введением различных поглощающих добавок в основу. В качестве основы используют
каучук, поролон, пенополистирол, пенопласт, керамико-металлические композиции и
т.д. В качестве добавок применяют сажу, активированный уголь, порошок
карбонильного железа и др. Все экраны обязательно должны заземляться для
обеспечения стекания образующихся на них зарядов в землю.
Для увеличения поглощающей способности
экрана их делают многослойными и большой толщины, иногда со стороны падающей
волны выполняют конусообразные выступы.
Наиболее часто в технике защиты от
электромагнитных полей применяют металлические сетки. Они легки, прозрачны,
поэтому обеспечивают возможность наблюдения за технологическим процессом и
излучателем, пропускают воздух, обеспечивая охлаждение оборудования за счет
естественной или искусственной вентиляции.
В таблице приведен предельно
допустимый уровень электромагнитного поля, установленный ГОСТ 12.1.002-84
|
Источник
|
Диапазон
|
Значение
ПДУ
|
Примечание
|
|
Видеодисплейный
терминал ПЭВМ
|
5
Гц - 2 кГц
|
Епду
= 25 В/м Впду = 250 нТл
|
Условия
измерения: расстояние 0,5 м вокруг монитора ПЭВМ
|
|
2
- 400 кГц
|
Епду
= 2,5 В/м Впду = 25 нТл
|
|
|
поверхностный
электростатический потенциал
|
V
= 500 В
|
Условия
измерения: расстояние 0,1 м от экрана монитора ПЭВМ
|
.14 Охрана окружающей среды
На предприятиях целесообразно разграничивать
затраты на охрану окружающей среды, связанные с производством продукции и с
доведением продукта до определенного уровня экологического качества, либо с
заменой его другим, более экологичным.
Существует связь между качеством продукции и
качеством окружающей среды: чем выше качество продукции (с учетом экологической
оценки использования отходов и результатов природоохранной деятельности в
процессе производства), тем выше качество окружающей среды.
Обоснование экологичности представляется
неотъемлемой частью системы управления, влияющей на выбор приоритетов в
обеспечении народного хозяйства природными ресурсами и услугами в пределах
намечаемых объемов потребления.
Различие производственных интересов и отраслевых
заданий определяет особенности взглядов специалистов на проблему экологизации
производств, применяемой и создаваемой техники и технологии.
Предпринимаются попытки на основе единого
методического подхода, расчетом частных и обобщающих показателей выразить
взаимосвязь натуральных и стоимостных характеристик в принятии экономически
целесообразного и экологически обусловленного (приемлемого) решения.
Приоритетность натуральных параметров, показателей отвечает потребностям
ресурсообеспечения общественного производства. Стоимостные показатели должны
отражать результативность усилий по снижению (или повышению) техногенной
нагрузки на природу. С их помощью производится расчет экологического ущерба и
оценивается эффективность мер по стабилизации режима природопользования.
Надо сказать, что кроме этого принимаются и
такие меры, как:
обеспечение организации производства нового,
более совершенного оборудования и аппаратуры для очистки промышленных выбросов
в атмосферу от вредных газов, пыли, сажи и других веществ;
проведение соответствующих научных исследований
и опытно-конструкторской работ по созданию более совершенной аппаратуры и
оборудования для защиты атмосферного воздуха от загрязнения промышленными
выбросами;
осуществление на предприятиях и организациях
монтажа и наладки газоочистного и пылеулавливающего оборудования и аппаратуры;
осуществление государственного контроля за
работой газоочистных и пылеулавливающих установок на промышленных предприятиях.
5.15 Расчёт коэффициента безвредности
Безвредность работы на ЭВМ характеризуется
параметрами санитарно-гигиенических и психо-физических производственных
факторов условий труда, действующих на работников при выполнении работы.
Определение коэффициентов безвредности труда (КБВ) осуществляется на основании
научных разработок НИИ труда, согласно которым состояние условий труда на
рабочем месте по характеру и степени вредного воздействия производственных
факторов на работающих может осуществляться одной из шести категорий тяжести
труда (КТi).
Для определения показателей безвредности
составляем таблицу с оценками санитарно-гигиенических и психо-физических
условий труда. В графе 2 учитываются только те вредные факторы, которые имеют
фактическое значение, соответствующее категории тяжести КТi > I балла по
классификационной таблице 5.1.
Таблица 5.1
|
№
П/П
|
Наименование
действующего вредного фактора
|
ПДК,
ПДУ
|
Фактическое
значение параметра условий труда
|
КТi
(балл)
|
КБВ=
1- (КТi/6)
|
|
1
|
Температура
воздуха на рабочем месте оС в тёплый период года в холодный период года
|
+(18-20) +(22-20)
|
+(20-22) +(20-17)
|
2
|
1-2/6=0,67
|
|
2
|
Электромагнитные
поля радиочастот
|
¯
|
на
уровне ПДУ
|
2
|
1-2/6=0,67
|
|
3
|
Рабочее
место, рабочая поза и перемещения в пространстве
|
_
|
Стационарное
рабочее место, поза свободная (смена позы «стоя-сидя» по усмотрению
работника)
|
2
|
1-2/6=0,67
|
|
4
|
Напряжение
зрительной работы
|
_
|
Средняя
|
3
|
1-3/6=0,5
|
|
5
|
Длительность
сосредоточенного наблюдения в % от времени смены при освещённости
соответствующей нормативам
|
_
|
От 25 до 50
|
2
|
1-2/6=0,67
|
|
6
|
Режим
труда и отдыха
|
_
|
Отсутствует
обоснованный режим труда и отдыха
|
3
|
1-3/6=0,5
|
|
7
|
Нервно
эмоциональная нагрузка
|
_
|
Простые
действия по заданному плану с возможностью коррекции, благоприятный
психологический климат
|
2
|
1-2/6=0,67
|
|
8
|
Интеллектуальная
нагрузка
|
_
|
Решение
простых альтернативных задач
|
2
|
1-2/6=0,67
|
Интегральный показатель вредных производственных
факторов:
 балл.
балл.
Категория тяжести труда- допустимая
(от 34 до 45).
Определяем интегральный коэффициент
безвредности труда технологического процесса
Графическое представление таблицы
5.1 дано на диаграмме (рис.5.6).
 Рис.5.6
Рис.5.6
Выводы
В соответствии с выше изложенными
требованиями к рабочему месту и помещению с точки зрения безопасности и
экологичности рассмотрим, в какой степени этим требованиям соответствует
рабочее место, на котором производилась работа.
Требования электробезопасности, в
рабочем помещении полностью соблюдены.
Пожарная безопасность обеспечена не
в полной мере - отсутствует пожарная сигнализация. Из средств пожаротушения
имеются по одному гидранту на каждом этаже здания. Также на каждом этаже
вывешен план эвакуации людей в случае пожара.
Шумы и вибрации на рабочем месте
практически отсутствуют. Рабочее помещение расположено окнами во двор, поэтому
уличных шумов и вибраций нет. Шум и вибрация в помещении создаются только
работающими ПЭВМ, но они создают максимальный уровень шума до 35дБ (по
техническому паспорту), что соответствует СНиП 2.01.02-85 (меньше 50дБ).
Концентрация вредных веществ в
воздухе рабочего помещения ничтожно мала и не опасна для здоровья. Содержание
обычной пыли в атмосфере помещения также невелико, так как ежедневно
производится влажная уборка помещения.
Требования к микроклимату и
вентиляции обеспечиваются автономным кондиционером КБ2-2.24В-11Т2. Данный
кондиционер осуществляет автоматическое поддержание заданной степени охлаждения
или нагрева, осушение, вентиляцию и очистку воздуха от пыли. Производительность
обработки воздуха у кондиционера 500 м3/ч, что позволяет поддерживать
оптимальный микроклимат в помещении объемом 180 м3. В ввиду того, что все
рабочие помещения имеют относительно небольшую площадь, то в теплое время года
приемлемым является проветривание открытием окон перед началом рабочего дня и в
течение обеденного перерыва.
Конструкция рабочего места и
взаимное расположение всех его элементов (сиденье, органы управления, средства
отображения информации) соответствуют антропометрическим, физиологическим и
психологическим требованиям, а также характеру работы.
Рабочее место расположено
перпендикулярно оконным проемам, это сделано с той целью, чтобы исключить
прямую и отраженную блесткость экрана от окон и приборов искусственного
освещения, которыми являются лампы накаливания.
Интенсивность энергетических
воздействий от ПЭВМ не превышает норм, установленных ГОСТ 12.1.002-84,
допускающих работу в помещении в течение всего рабочего дня.
На основании вышесказанного можно
сделать вывод, что рабочее место удовлетворяет экологическим нормам и
требованиям безопасности.
Глава 6. Расчёт затрат и цены на разработку
программызадач устойчивости методом конечных сумм
Современные тенденции развития авиации:
усложнение всех видов летательных аппаратов, рост их стоимости и времени
разработок привели к необходимости использовать ЭВМ.
Затраты на производство современной авиационной
техники достигают огромных величин. В настоящее время даже целое развитое уже
не может позволить с «нуля» создать, например, современный пассажирский
авиалайнер, а также военный самолёт. Для этого нужные целые отрасли, которые
были бы заняты только одним проектом. Современная рыночная экономика, вряд ли
может это позволить. Яркий пример этому- авиаконцерн Airbus. Созданием
новейшего конкурента Boeing-787 Dreamliner занималась вся Европа, а также
Китай, Япония и Россия. Примеров тому можно привести не мало.
В этом развитии событий огромное место занимает
расчёт и проектирование конструкций самолётов с использованием ЭВМ. В настоящей
дипломной работе был разработан алгоритм численного решения неклассических
задач устойчивости прямолинейных и криволинейных плоских стержней.
С помощью данного алгоритма, написанного на
языке MatLab, в достаточно короткое время можно оценить прочностные
характеристики элементов конструкции СЛА, расчётной схемой которых является
стержень.
В этой главе произведен расчет затрат на разработку
данного алгоритма численного решения неклассических задач устойчивости методом
конечных сумм и определена стоимость данной программы. Расчет осуществляется по
следующим статьям:
заработная плата инженера-программиста;
затраты на машинное время;
отчисления на социальное страхование и
обеспечение с заработной платы;
накладные расходы
Нормирование труда в процессе создания
программного обеспечения вызывает трудности. Творческие элементы труда
практически не нормируются, они могут быть определены либо на основе экспертных
оценок опытных программистов, либо жестко заданными сроками разработки, в
которое программист обязан найти решение. Технические элементы труда
программирования достаточно хорошо поддаются нормированию.
Анализ различных подходов к нормированию
процесса программирования показал, что в качестве основного фактора,
определяющего трудоемкость и длительность разработки, может использоваться
базовая модель.
Будем считать, что данная программа создается в
бюджетной организации (КГТУ им. А. Н. Туполева) и принимаем заработную плату
инженера-программиста равную 6500 рублей, научного руководителя равной 9500
рублей. В данный проект входит расчет заработанной платы инженера-программиста
и научного руководителя.
.1 Расчет затрат на оплату труда инженера-программиста
Сумма затрат на оплату труда инженера -
программиста определяется из временных затрат на выполнение работ и
квалификации исполнителя. Квалификация исполнителя определяет величину
почасовой оплаты. Таким образом, сумма затрат на оплату труда инженера -
программиста рассчитывается по формуле:
З = ВЗ × ПО,
где З - затраты на оплату труда инженера -
программного продукта;
ВЗ - временные затраты в часах на выполнение
работы, час; ПО - величина почасовой оплаты труда инженера - программиста руб/час.
Величина почасовой оплаты труда инженера -
программиста оценивается исходя, из месячной зарплаты и рассчитывается по
формуле
ПО = МЗП / ФРВ руб./час,
где МЗП - величина месячной зарплаты
инженера-программиста, руб;
ФРВ - фонд рабочего времени в часах за месяц.
Величина месячной зарплаты инженера-программиста
зависит от его квалификации, устанавливается в размере 6500 руб. Фонд рабочего
времени за месяц устанавливается в количестве 168 часов, то есть 21 рабочий
день no 8 часов.
Величина почасовой оплаты труда:
ПО = 6500/168 = 38 руб. 69 коп.
Трудоёмкость разработки программного продукта
можно определить следующим образом:
= tн+ tа + tп + tотл + tд чел-ч,
где tн - затраты труда на исследование алгоритма
решения задачи;а - затраты труда на разработку блок - схемы алгоритма;п -
затраты труда на составление программы по готовой блок-схеме;отл - затраты
труда на отладку программы на ЭВМ; д - атраты труда на подготовку документации
по задаче.
Составляющие затрат, в свою очередь можно
вычислить через условное число операторов в разрабатываемом программном
обеспечении. Условное число операторов можно рассчитать: = q ×
c ×
(l + p) операторов,
где q - число операторов в программе, равное
2000 операторов;
с - коэффициент сложности программы, принимаем с
= 1,5;
р - коэффициент коррекции программы в ходе ее
разработки, принимаем р = 0,08.
Условное число операторов в разрабатываемом
программном обеспечении составляет:
= 2000 × 1,5 ×
(l + 0,08) = 3240 операторов
Оценить затраты труда на подготовку описания
задачи не возможно, т.к. это связано с творческим характером работы, вместо
этого оценим затраты труда на изучение описания задачи с учётом уточнения
описания и квалификации программиста определяются:
н = Q × B /(75...85 ×
k),
где B - качество постановки задачи, В = 1,3; -
коэффициент квалификации разработчика, k = 1.
Таким образом, получим
н = 3240 × 1,3/(75 ×
1) = 56 чел-ч.
Затраты труда на разработку алгоритма решения
задачи:
а = Q/(10 × k) = 3240/(10 ×
1) = 324 чел-ч.
Затраты труда на составление программы по
готовой блок-схеме:
tп = Q /(20 × k) = 3240/(20 ×
1) = 162 чел-ч.
Затраты труда на отладку программы на ЭВМ:
при автономной отладке одной задачи:
отл* = Q /(4 × k) = 3240/40 = 81
чел-ч;
при комплексной отладке задачи:
отл = 1,5 × tотл* = 1,5 ×
81 = 121,5 чел-ч.
Затраты труда на подготовку документации по
задаче определяются:
д = tдр + tдо,
где tдр - затраты труда на подготовку материалов
в рукописи;до - затраты труда на ввод в ПЭВМ на редактирование, печать и
оформление документации;
др = Q/(15 × k) = 3240/(15 ×1)
= 216 чел-ч;до = 0,75 × tдр = 0,75 ×
216 = 162 чел-ч.
Отсюда
д = 216 + 162 = 378 чел-ч.
Полная средняя трудоёмкость разработки программы
можем рассчитать:
tрп = 0,83 × Q / k = 0,83 ×
3240/ 1 = 2689,2 чел-ч.
В результате трудоемкость разработки
программного обеспечения составляет:
= 56 + 324 + 162 + 121,5 + 378 = 1041,5 чел-ч.
Время разработки программного обеспечения:
= t / ФРВ = 1041,5 / 168 = 6 месяцев.
Затраты на оплату труда инженера-программиста
составляет:
З = 1041,5 × 38,69 = 40295,64
руб
.2 Расчет затрат на оплату труда научного
руководителя
Научный руководитель затрачивает на руководство
инженера-программиста 4 часа в неделю, за месяц 6 часов.
Величина почасовой оплаты труда:
ПО = 9500/16 = 593 руб. 75 коп.
Время разработки программного обеспечения
составляет 6 месяцев.
Трудоемкость руководства научным руководителем
составляет:
= 16 × 6 = 96 чел-ч.
Затраты на оплату труда научного руководителя
составляет:
З = 96 × 593,75 = 57000
руб.
Затраты на оплату труда инженера-программиста и
научного руководителя составляют:
З =40295+57000 = 97295 руб.
.3 Расчет затрат на машинное время
Стоимость одного часа машинного времени
составляет 30 руб.
Необходимые временные затраты включают в себя:
формирование данных: 972 часов;
отладка программ и тестирование: 2430 часов;
подготовка документации: 1134 часов.
Таким образом, временные затраты на отладку и
тестирование определяются в количестве 4536 часов.
В результате сумма затрат на машинное время
составляет:
ЗМВ = 4536 × 30 = 136080 руб.
В том числе НДС (ст. 111500) составляет 6494,4
руб., тогда сумма затрат на машинное время без НДС
ЗМВ = 136080 - 6494,4 = 129585,6 руб.
.4 Расчет отчислений на единый социальный налог
Отчисления на единый социальный налог составляет
26% от суммы оплаты труда:
ОТЧ = 97295 × 0,26 = 25296 руб.
.5 Расчет накладных расходов
Накладные расходы составляют 60% от расходов на
оплату труда. В соответствии с расчетами накладные расходы определяются:
НР = 97295 × 0,6 = 58377 руб.
Таблица 1. Расчет затрат на материалы
|
№
п/п
|
Наименование
материала
|
Ед.
изм.
|
Расход
матери-ала
|
Цена
за ед. , руб
|
Общая
сумма затрат, руб
|
В
том числе НДС
|
|
1
|
Бумага
|
Пачка
500 л.
|
1
|
110
|
110
|
19,8
|
|
2
|
Дискета
CDRW
|
Штука
|
5
|
15
|
75
|
2,25
|
|
3
|
Картридж
для принтера
|
Штука
|
1
|
1700
|
1700
|
306
|
|
4
|
Прочее
|
Штука
|
12
|
6
|
72
|
12,96
|
|
5
|
Итого
|
|
|
|
1897
|
341
|
Таблица 2. Расчет затрат на закупку ПО
|
№
п/п
|
Наименование
ПО
|
Кол-во,
шт.
|
Цена
за единицу, руб
|
Общая
сумма затрат, руб
|
В
том числе НДС
|
|
1
|
MatLab
7.0
|
1
|
35000
|
35000
|
6300
|
|
2
|
MS
WindowsXP
|
1
|
4280
|
4280
|
770,4
|
|
3
|
MS
Office
|
1
|
9210
|
9210
|
1657,8
|
|
4
|
Итого
|
|
|
48490
|
8728
|
Транспортно-заготовительные расходы составляют
3-4% от стоимости материалов:
ТЗР = 1897 × 0,04 = 76 руб.
В том числе НДС составляет 13 руб. 68 коп.,
тогда транспортно-заготовительные расходы:
ТЗР = 76 - 13,68 = 62,32 руб.
Таблица 3. Итоговый расчет затрат на разработку
ПО
|
Виды
затрат
|
Сумма
(руб.)
|
|
Заработная
плата инженера - программиста и научного руководителя
|
97295
|
|
Отчисления
на единый социальный налог
|
25296
|
|
Затраты
на машинное время
|
129585,6
|
|
Накладные
расходы
|
58377
|
|
Закупка
программного обеспечения
|
39762
|
|
Транспортно
- заготовительные расходы
|
62,32
|
|
Расходные
материалы
|
1556
|
|
Итого
производственная себестоимость
|
351933
|
В результате расчета затраты на создание данного
программного продукта составили 351933 руб. без НДС - это есть производственная
себестоимость.
Для продажи данной программы, необходимо знать
стоимость программы. Для этого мы должны заложить прибыль, которая пойдет на
развитие организации, приобретение нового оборудования. Возьмем прибыль (П) 30%
от производственной себестоимости, тогда получим
П = 351933 × 0,3 = 105580 руб.,
в том числе налог на прибыль 24% составит 26011
руб. и чистая прибыль
П = 108382 руб. - 26011 = 82371 руб.
Найдем полную стоимость программы
П = 351933 + 108382,26 = 460315 руб.
Налог на добавленную стоимость 18% от полной
стоимости программы составляет
НДС = 460315× 0,18 = 84538 руб.
Полная стоимость программы с НДС
П = 460315 + 82857 = 543172 руб.
Литература
Паймушин
В.Н., Шалашилин В.И. Непротиворечивый вариант теории деформаций сплошных сред в
квадратичном приближении. Доклады Академии Наук, 2004, т.396, №4, с.492-495.
Паймушин
В.Н., Шалашилин В.И. О соотношениях теории деформаций в квадратичном
приближении и проблемы построения уточненных вариантов геометрически не
линейной теории слоистых элементов конструкций. ПММ, т.69, Вып.5,
2005,C.862-882.
Паймушин
В.Н. Проблемы геометрической нелинейности и устойчивости в механике
деформируемых твердых тел. Труды международной конференции китайско-российской
аэрокосмической техники. Northwestern Polytechnical University Press, 2006, с.
20-42.
Паймушин
В.Н. Проблемы геометрической нелинейности и устойчивости в механике тонких
оболочек и прямолинейных стержней // ПММ. 2007, Т.71. Вып.5. С.867-925.
Паймушин
В.Н., Полякова Н.В. Непротиворечивый вариант геометрически нелинейной теории
плоских криволинейных стержней в квадратичном приближении с приложениями к
неклассическим задачам устойчивости //ПММ, 2008, (в печати).
Алфутов
Н.А., Зиновьев П.А., Попов Б.Г. Расчет многослойных пластин и оболочек из
композиционных материалов. - М.: Машиностроение, 1984. - с.264
Болотин
В.В. Неконсервативные задачи теории упругой устойчивости. Гос. издат.
Физико-математической литературы, М.,1961, с.339.
Вахитов
М.Б. Интегрирующие матрицы - аппарат численного решения дифференциальных
уравнений строительной механики //Изв. вузов. Авиационная техника. 1966. № 3.С.
50 - 61.
Даутов
Р.З., Паймушин В.Н. О методе интегрирующих матриц решения краевых задач для
обыкновенных уравнений четвертого порядка. - Известия ВУЗов. Математика, 1996,
N10, с.13-25.
Горшков.А.Г.,
Трошин В.Н., Шалашилин В.И. Сопротивление материалов.
М.Физматлит,2002,с.375-377
Паймушин
В.Н., Фирсов В.А. Оболочки из стекла. Расчет напряженно-деформированного
состояния - М.: Машиностроение, 1993. - 208 с.
Писаренко
Г.С., Яковлев А.П., Матвеев В.В. Справочник по сопротивлению материалов. Киев:
Наук.думка,1988.-736с.
Приложение
В п.2.2, 3.2, 3.3, 3.4 настоящей работы
используются построенные интегрирующие матрицы. В данном разделе приложения
приведён алгоритм построения интегрирующих матриц для произвольного характера
расположения расчётных сечений по длине интервала интегрирования. Алгоритм
реализован в виде подпрограммы GetIM на алгоритмическом языке MatLab.
По предлагаемому алгоритму формируются
интегрирующие матрицы [mIm1] и [mIm2]. Ниже приведён текст подпрограммы GetIM
на языке Matlab:
function
[mIM1,mIM2]=GetIM(cN,cPoint,vSech,vX)
%--------------------------------------------------------------------------
%mIM1(cN,cN)-интегрирующая матрица 1-го рода;
%mIM2(cN,cN)-интегрирующая матрица 2-го рода;
%cN-число сечений на всём интервале
интегрирования;
%cPoint-число точек перегиба внутри интервала;
%vSech(cPoint+1)-вектор с элементами равными
числу сечений на каждом
% подинтервале интегрирования (с граничными
сечениями
% подинтервалов);
%vX(cPoint+2)-вектор с элементами равными
координатам граничных точек
% подинтервалов, включая начало и конец
интервала
% интегрирования;=[10.0 16.0 -2.0];=[-1.0 13.0
13.0 -1.0];=zeros(cN,cN);
mIM2=zeros(cN,cN);=zeros(cN,cN);=ones(cN,cN);=cPoint+1;=0;i=1:cUch;=vSech(i);=(vX(i+1)-vX(i))/(24.0*(cSech-1));=zeros(cSech,cSech);(2,1:3)=vVes1;(cSech,cSech-2:cSech)=vVes1;j=3:cSech-1;(j,j-2:j+1)=vVes2;=cH*mLi;(cShag+1:cShag+cSech,cShag+1:cShag+cSech)=...(cShag+1:cShag+cSech,cShag+1:cShag+cSech)+mLi;=cShag+cSech-1;=tril(mT);=mT-mT1;=mT1*mL;
mIM2=mT2*mL;
%--------------------------------------------------------------------------
Ниже приведена подпрограмма формирования блочных
диагональных интегрирующих матриц GetI. Она формирует матрицы mI1, mI2, mI3 из
матриц mIM1, mIM2.
function [mI1,mI2,mI3]=GetI(mData);
%--------------------------------------------------------------------------
% Функция формирования интегрирующих
матриц=mData(1,1);
cPoint=mData(1,2);=mData(2,1:cPoint+1);=mData(3,1:cPoint+2);=mData(1,3);_3=3*cN;_5=5*cN;_8=8*cN;_3=3;_5=5;_8=8;
%--------------------------------------------------------------------------
[mIM1,mIM2]=GetIM(cN,cPoint,vSech,vX);cUr3=zeros(cDimN_3,cDimN_3);=zeros(cDimN_3,cDimN_3);=0;i1=1:3;(cShag+1:cShag+cN,cShag+1:cShag+cN)=mIM1;(cShag+1:cShag+cN,cShag+1:cShag+cN)=mIM2;=cShag+cN;=zeros(cDim0_3,cDimN_3);=mIM1(cN,:);i1=0:1:cDim0_3-1;(i1+1,i1*cN+1:(i1+1)*cN)=vOn;5=zeros(cDimN_5,cDimN_5);=zeros(cDimN_5,cDimN_5);=0;i1=1:5;(cShag+1:cShag+cN,cShag+1:cShag+cN)=mIM1;(cShag+1:cShag+cN,cShag+1:cShag+cN)=mIM2;=cShag+cN;=zeros(cDim0_5,cDimN_5);=mIM1(cN,:);i1=0:1:cDim0_5-1;(i1+1,i1*cN+1:(i1+1)*cN)=vOn;8=zeros(cDimN_8,cDimN_8);=zeros(cDimN_8,cDimN_8);=0;i1=1:8;(cShag+1:cShag+cN,cShag+1:cShag+cN)=mIM1;(cShag+1:cShag+cN,cShag+1:cShag+cN)=mIM2;=cShag+cN;=zeros(cDim0_8,cDimN_8);=mIM1(cN,:);i1=0:1:cDim0_8-1;(i1+1,i1*cN+1:(i1+1)*cN)=vOn;
end