Система управления конкретным мехатронным узлом
Введение
Теория дискретных устройств - наука, изучающая
способы описания и преобразования структурных элементов. Предметом данной науки
является математический аппарат алгебры логики, способы задания и реализации
функций алгебры логики, методы, используемые при преобразовании логических
структур комбинационных систем и конечных автоматов.
Теория дискретных устройств - сравнительно
молодая и быстроразвивающаяся отрасль науки. Её появление в 30-х годах
двадцатого столетия связанно с усложнением и совершенствованием релейных систем
управления, когда возникла необходимость в их математическом описании. Основы
теории ДУ начали закладываться в 1938 - 1940 гг., когда учёные СССР, США,
Японии доказали применимость булевой алгебры логики при анализе и синтезе контактных
схем. Применение аппарата алгебры логики при решении задач дискретной техники
получило существенное развитие в трудах многих учёных. Создание ЭВМ внесло
большой вклад в развитие теории ДУ. На сегодняшний день, зачастую, без
использования ЭВМ невозможно решать те или иные практические задачи, связанные
с анализом, разработкой и усовершенствованием дискретных устройств.
Разработка структурно - кинематической схемы
кинематический автоматический мехатронный узел
В данной работе по выше приведенному заданию в
качестве объекта управления был выбран Механизм автоматической смены
инструмента. Представленный на рис 1 механизм состоит из трех устройств:
. Магазин (М)
. Захватное устройство (ЗУ)
. Револьверная Головка (РГ)
В качестве исполнительных устройств, приводящих
механизм в движение, используются три электродвигателя Д1, Д2, Д3.
Для контроля положения захватного устройства
применены путевые датчики сигнал с которых поступает на логический
преобразователь.
Цикл работы механизма выглядит следующим
образом:
Составление таблицы включения
Проанализировав выше предложенный алгоритм
работы механизма, составим таблицу включения без использования виртуальных
путевых датчиков (табл. 1).
Виртуальные путевые переключатели -
условное обозначение датчиков в виде  и
и  , если а1 и а2
существуют в комбинациях
, если а1 и а2
существуют в комбинациях  и
и  и не
существует в комбинации а1 а2
и не
существует в комбинации а1 а2
Таблица составляется с учетом
сигнала блокировки Рusk. После учета системой значения этого сигнала (Рusk =
1), осуществляется запуск автоматического цикла работы механизма. Рusk являет
собой имитацию так называемой кнопки «Запуск» автоматической системы (АС),
после нажатии на которую, механизм начинает свою работу.
Таблица 1
|
Такт
|
Состояние
переменной
|
Состояние
Логических Функций
|
|
1
|
С=1
|
Если
Рusk,то fv=1
|
|
2
|
С=0
|
fl=1
|
|
3
|
D=1
|
fy=1
|
|
4
|
E=0
|
fl=1
|
|
5
|
F=1
|
fb=1
fl=1
|
|
6
|
A=0
|
fl=1
|
|
7
|
B=1
|
fy=1
fl=1
|
|
8
|
F=0
|
fl=1
|
|
9
|
G=1
|
fz=1
fl=1
|
|
10
|
D=0
|
fl=1
|
|
11
|
C=1
|
fl=1Если
M=1, то fM=1
|
|
12
|
M=0
|
fl=1
Если Pusk2=1, то fv=1
|
|
13
|
C=0
|
fl=1
|
|
14
|
D=1
|
fx=1
fl=1
|
|
15
|
G=0
|
fl=1
|
|
16
|
F=1
|
fa=1
fl=1
|
|
17
|
fl=1
|
|
18
|
A=1
|
fx=1
fl=1
|
|
19
|
F=0
|
|
|
20
|
E=1
|
fz=1
|
|
21
|
D=0
|
|
|
|
|
|
Построение начальной циклограммы
На основе составленной таблицы включения
получена начальная циклограмма (табл. 2). Проанализировав ниже приведенную
циклограмму, выявили одинаковые веса в тактах
2-21,3-20,4-19,5-18,6-17,7-16,8-15,9-14,10-13. В этих тактах возможны сбои в
работе автоматической системы, дабы избежать этих ситуаций введем элемент
памяти в АС.
Таблица 2 Таблица начальной циклограммы

Способ добавления элемента памяти в систему
состоит в следующем:
. Выписываем в ряд весовые коэффициенты
соответствующие такту с 1-21
. Отметим с помощью скобки те элементы в
которые хотим добавить элемент памяти.
. Обозначим внутренние элементы памяти
буквами m1
Руководствуясь выше представленным способом,
получен следующий весовой ряд (рис. 2). Для получения уникальных весов
потребовалось ввести один элемент памяти m1.
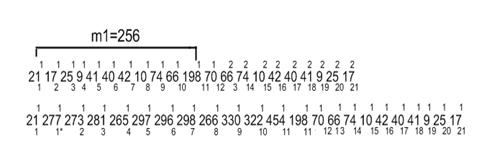
рис. 2 Введение элементов памяти
Построение реализуемой циклограммы
При построении реализуемой циклограммы необходимо
учитывать, что переменные включающие внутренние элементы памяти, изменяются так
же, как и переменные, поступающие с выходов этих элементов, но со смещение по
фазе на один такт влево. Реализуемая циклограмма для АС представлена на рис. 3:

рис. 3 Реализуемая циклограмма
Минимизация логических функций
Чтобы уменьшить количество переменных в
логических функциях, воспользуемся специализированной программой MINWIN.
Выбор в пользу ЭВМ обусловлен большим
количеством переменных.
Запишем для каждой логической функции веса
обязательных и запрещенных состояний соответственно :
. fv: Обязательные состояния 277 70 273
66
Запрещенные состояния 21 281 265 297 296 298 266
330 322 454 198 74 10 42 40 41 9 25 17
Функция после минимизации примет следующий вид
(рис 4)


рис. 4 Результат минимизации в программе MINWIN
. fz: Обязательные состояния 330 25 322
17
Запрещенные состояния 21 277 273 281 265 297 296
298 266 454 198 70 66 74 10 42 40 41 9
Функция после минимизации примет следующий вид
(рис 5)

рис.5 Результат минимизации в программе MINWIN
. fx: Обязательные состояния 74 10 41 9
Запрещенные 21 277 273 281 265 297 296 298 266
330 322 454 198 70 66 42 40 25
Функция после минимизации примет следующий вид
(рис 6)
рис.6 Результат минимизации в программе MINWIN
fy: Обязательные состояния 281 265 298 266
Запрещенные состояния 21 277 273 297 296 330 322
454 198 70 66 74 10 42 40 41 9 25 17
Функция после минимизации примет следующий
вид:(рис 7)

рис.7 Результат минимизации в программе MINWIN
: Обязательные состояния 198
Запрещенные состояния 21 277 273 281 265 297 296
298 266 330 322 454 70 66 74 10 42 40 41 9 25 17
Функция после минимизации примет следующий
вид:(рис 8)
рис.8 Результат минимизации в программе MINWIN
. fl: Обязательные состояния 273 281 265
297 296 298 266 330 322 454 198 70 66 74 10 42 40 41
Запрещенные состояния 21 277 9 25 17
Функция после минимизации примет следующий вид
рис 9


рис.9 Результат минимизации в программе MINWIN
fm1: Обязательные состояния 21 277 273 281 265
297 296 298 266 330 322
Запрещенные состояния состояния 454 198 70 66 74
10 42 40 41 9 25 17
Функция после минимизации примет следующий вид
(рис 10)

рис.10 Результат минимизации в программе MINWIN
5. fa: Обязательные состояния: 42 40
Запрещенные состояния: 21 277 273 281 265 296
297 298 266 330 322 454 198 70 66 74 10 41 9 25 17
Функция после минимизации примет следующий вид
рис 11

рис.11 Результат минимизации в программе MINWIN
6. fb: Обязательные состояния 297 296
Запрещенные 21 277 273 281 265 298 266 330 322
454 198 70 66 74 10 42 40 41 9 25 17
Функция после минимизации примет следующий вид
рис 12


рис.12 Результат минимизации в программе MINWIN
Проверка системы на состязание цепей
Там, где функция выключается, а любая из
переменных входящих в эту функцию меняет свое состояние, возникает состязание
цепей.
Если в результате состязания не нарушается
функционирование дискретного автомата (нет непредвиденных включений или
выключений выходных элементов и элементов памяти), то такие состязания
называются допустимыми (некритическими), в противном случае состязания будут
недопустимыми (критическими).
Проверим поочередности каждую функцию:- нет
критических состязаний- нет критических состязаний- нет критических состязаний
 ->
-> 
 ->
->  ,
, 
 ->
->

 ->
->
Реализация системы управления в
ISaGRAF
Реализуем разработанную нами систему
в программе ISaGRAF.
Откроем заранее установленное на
компьютер программное обеспечение ISaGRAF. После процесса установки ПО на
компьютер, файл запуска располагается в меню «Пуск»(При условии, что оператор
не указал другое место расположения файла на компьютере)(рис.13)
рис.13 Запуск программы ISaGRAF
Создадим новый проект, в котором нам предстоит
реализовать выше разработанную систему (File-New), если проект был создан ранее
выберем его из списка предложенных(рис.14)

рис14. Создание проекта в ISaGRAF
После создания проекта перед нами всплывет окно
выбора программ, если программ не оказалось, создадим новую(В окне выбора
программ File-New) (рис15)

рис15 Окно работы с программами в ISaGRAF
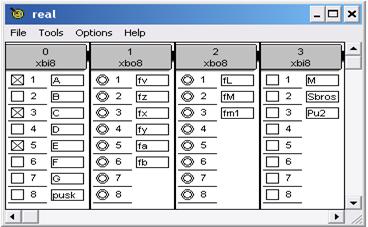
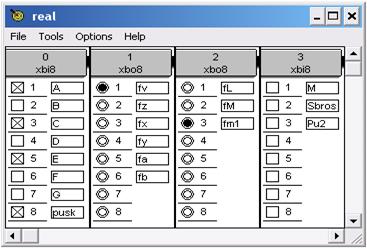
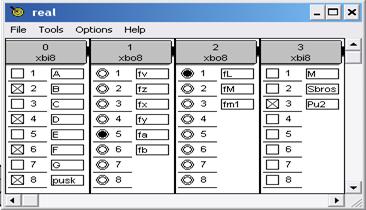
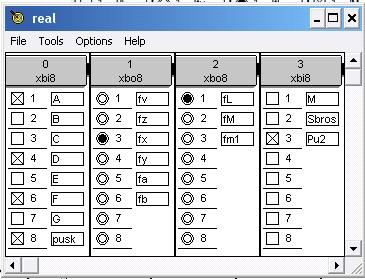
Объявим входные и выходные переменные с указание
типа(BOOALEANS)(рис 16)

рис16 Объявление переменных в ISaGRAF
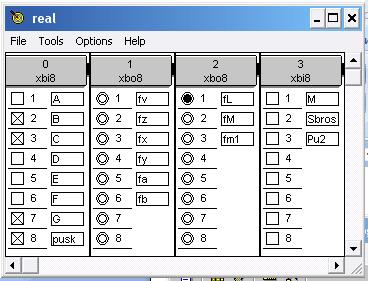
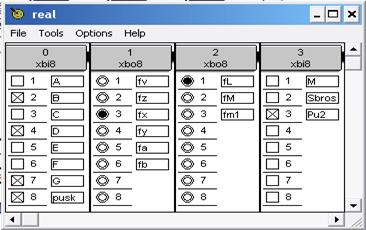
. Зададим подключения входов и выходов(В
окне переменных Tools-i/o connection) (рис17)

рис17 Подключение входов-выходов
Реализуем схему в ISaGRAF (рис 19)
Представим схему в базисе И-НЕ (рис20)
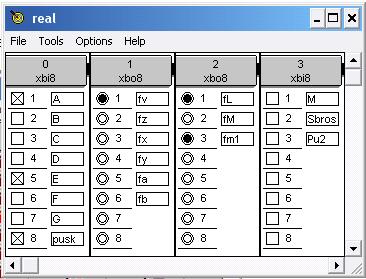
Протестируем реализованную функциональную схему
при помощи программы ISaGRAF (рис21)(предворительно нажав на кнопку SIMULATE)
рис21 Запуск тестирования программы
. Проанализируем результаты работы
программы
Выставим механизм в исходное состояние. При
нажатии на кнопку Pusk подается сигнал V - движение перекладчика вниз и
одновремено включается элемент памяти.
При достижении механизмом датчика D включается
разжимной механизм L и включается движение вправо Y.
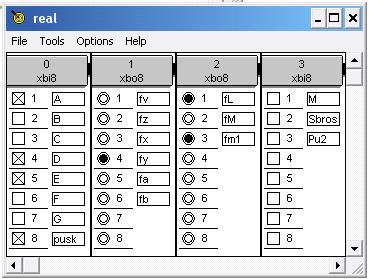
При достижении механизмом датчика перекладчик
разворачивается на 180 градусов
При достижении механизмом датчика B включается
движение вправо Y
Когда механизм достигает датчика G включается
движение вверх Z
При достижении механизмом датчика C помощью
датчика М запускается механизм, после отработки механизма датчик М отключается
и механизм совершает движение вниз
Опустившись вниз механизм включает датчик G
который в свою очередь дает команду на движение влево Х.При движении влево
механизм достигает датчика F и прекращает свое движение, включается сигнал на
разворот механизма.
Развернувшись, механизму подается сигнал на
продолжение движения влево сигналом Х, достигнув крайнего левого положения,
выключается зажимной механизм и фиксируется деталь в револьверной головке.

Далее механизм возвращается в исходное состояние
и выключается кнопкой SBROS(либо повторяет цикл заново если требуется)

Заключение
В ходе выполнения курсового проекта
спроектировали систему управления конкретным мехатронным узлом. Провели анализ
работы данного узла, на основе которого построили циклограмму его работы. Для
оптимальной работы был введен элемент памяти, а также построена реализуемая
циклограмма. При помощи программы MINWIN произведена минимизация логических
функций. Разработанную систему смоделировали с помощью программы ISaGRAF.
Система работает по заданному циклу, оснащена
системой защиты от ложных срабатываний.
Список используемой литературы
1. Безгулов
Д.А Цифровые устройства и микропроцессоры. Учебное пособие / Феникс -
Ростов,2006. - 480с-(Высшее образование)
. Колев
Л.В Металлорежущие станки. Учебное пособие для втузов. Машиностроение -
Москва-1980.-500с
. Чикуров
Н.Г Алгоритмическое и программное обеспечение компьютерных систем управления:
Методические указания по выполнению расчетно-графической работы/УГАТУ - Уфа
2008 - 67 с
. Чикуров
Н.Г Курс Лекций. УГАТУ 2009. - 80с