Автоматизация резервуарного парка линейно-производственной диспетчерской службы 'Черкассы'
Федеральное
государственное бюджетное образовательное учреждение
высшего
профессионального образования
«Уфимский
государственный нефтяной технический университет»
Кафедра
автоматизации технологических процессов и производств
Дипломный
проект
Автоматизация
резервуарного парка линейно-производственной диспетчерской службы «Черкассы»
Студент гр. АГ
07-01 И.Ф. Гумеров
Руководитель
докт. техн. наук,
доц.
Г.Ю. Коловертнов
Консультант
по
технологическому, техническому
и специальному
разделам
докт. техн. наук,
доц. Г.Ю. Коловертнов
Уфа
РЕФЕРАТ
Дипломный проект 107 с., 28 рисунков, 19 таблиц,
10 использованных источников, 1 приложение.
РЕЗЕРВУАРНЫЙ ПАРК, СТРУКТУРА АВТОМАТИЗИРОВАННОЙ
СИСТЕМЫ УПРАВЛЕНИЯ, РАДАРНЫЙ УРОВНЕМЕР, ПОПЛАВКОВЫЙ УРОВНЕМЕР, НАДЕЖНОСТЬ
Объектом исследования является резервуарный парк
линейно
производственно-диспетчерской службы «Черкассы».
В процессе исследования выполнен анализ
существующего уровня автоматизации резервуарного парка.
Цель работы - анализ существующей системы
автоматики резервуарного парка линейной перекачивающей диспетчерской станции.
В результате исследования разработана
функциональная схема автоматизации резервуарного парка, предложен радарный
уровнемер RTG 3940 REX, произведен расчет надежности подсистемы с радарным
датчиком уровня.
Технико-экономические показатели, подтверждают
необходимость, актуальность, экономичность и надежность данного проекта.
Степень внедрения - внедрение отсутствует.
Эффективность проекта основывается на повышении
надежности средств автоматики, расширении функциональных возможностей, снижении
трудозатрат на техническое обслуживание и ремонт.
автоматизация радарный уровнемер
ОПРЕДЕЛЕНИЯ, ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
|
РП
ПС РВС РВСП НПЗ АНП САРД МДП СУ МПСА УСО АРМ МНПП РДП СДКУ ПО КИП и А ЦПУ
АСУ ТП ЧДД ИД ВНД СО ПФ КВ
|
-
резервуарный парк - перекачивающая станция - резервуар вертикальный стальной
- резервуар вертикальный стальной с понтоном - нефтеперерабатывающий завод -
авто-наливной пункт - система автоматического регулирования давления -
местный диспетчерский пункт - система управления - микропроцессорная система
автоматизации - устройство сопряжениями с объектами - автоматизированное
рабочее место - магистральный нефтепродуктопровод - районный диспетчерский
пункт - система диспетчерского контроля и управления - программное
обеспечение - контрольно-измерительные приборы и автоматика - центральное
процессорное устройство - автоматизированная система управления
технологическим процессом - чистый дисконтированный доход - индекс доходности
- внутренняя норма доходности - срок окупаемости - потребность
финансирования - капитальные вложения
|
ВВЕДЕНИЕ
Резервуарный парк является важным объектом на
месторождении. Он предназначен для приема и хранения нефти.
Автоматизация резервуарного парка позволяет
облегчить работу обслуживающего персонала, увеличить межремонтный период
основного технологического оборудования, постоянно совершенствовать
технологические режимы, способствующие сокращению потерь нефти благодаря
непрерывному контролю за работой оборудования и аппаратуры, немедленному
устранению всех недостатков и нарушений.
Актуальность создания автоматизированных систем
управления значительно возросла в последнее время в связи с повышением
стоимости нефтепродуктов, энергоресурсов, реагентов, затрат на содержание
обслуживающего персонала и поддержание экологии окружающей среды.
Одним из параметров, подлежащих контролю и
регулированию при подготовке нефти, является уровень жидкости и раздела сред в
резервуарах, для измерения, которого существует множество приборов и систем.
Предлагаемые в данном дипломном проекте приборы позволяют контролировать и
регулировать уровень жидкости и межфазные границы в резервуарах.
Целью дипломного проекта является
совершенствование существующей системы автоматизации резервуарного парка ЛПДС
«Черкассы».
Задачами дипломного проекта являются:
изучение режимов работы резервуарного парка и
его взаимодействия с другими объектами;
изучения средств автоматизации, применяемых в
резервуарном парке ЛПДС «Черкассы»;
повышение надежности рассматриваемого
технологического объекта путем внедрения радарного уровнемера RTG 3940 REX.
При работе над дипломным проектом использовались
материалы
ОАО «Уралтранснефтепродукт».
1. РЕЗЕРВУАРНЫЙ ПАРК ЛПДС «ЧЕРКАССЫ»
.1 Резервуарный парк
Резервуарный парк (РП) - это группа резервуаров
разных типов или однотипных резервуаров. Резервуарный парк применяется для
оперативного учета нефти по приему, хранению, откачке.
По назначению резервуарные парки можно разделить
на следующие виды:
товарно-сырьевые базы для хранения
нефтепродуктов и нефти;
резервуарные парки перекачивающих станций (ПС) и
нефтепродуктопроводов;
резервуарные парки хранения нефтепродуктов
различных объектов.
Эксплуатация резервуаров и резервуарных парков -
это совокупность процессов по хранению, приему и сдачи нефти, приемке в
эксплуатацию и испытанию, его ремонту, техническому обслуживанию и
диагностированию. Основные виды работ в процессе эксплуатации резервуарных
парков и резервуаров являются:
градуировка и определение вместимости резервуаров;
текущий ремонт и техническое обслуживание
резервуарных парков и их резервуаров по отдельности;
оперативное технологическое обслуживание
резервуарных парков и резервуаров;
техническое диагностирование резервуаров;
реконструкция резервуаров.
От назначения станции зависит вместимость
резервуарных парков. Так, резервуарный парк линейно производственно-
диспетчерской станции (ЛПДС) «Черкассы» спроектирован таким образом, чтобы
обеспечить бесперебойную работу нефтепровода, оптимальный запас нефти.
Виды резервуаров и их оборудование.
В соответствии со СНиП 2.11.03 резервуары для
нефти подразделяются:
по материалу, из которого они изготовлены: на
стальные и железобетонные;
по расположению относительно поверхности земли,
на надземные и подземные;
по конструкции:
) резервуар вертикальный стальной (РВС)
плавающей крышей или резервуар вертикальный стальной с понтоном (РВСП);
) железобетонные цилиндрические (со стационарной
или с плавающей крышей);
) железобетонные прямоугольные (со стационарной
крышей);
по способу изготовления:
) стальные резервуары рулонные;
) железобетонные - монолитные, сборные,
сборно-монолитные;
по номинальному объему [1].
Выбор конкретного оснащения резервуаров,
расположения оборудования и конструктивных элементов определяется проектной
документацией.
Дыхательная арматура включает дыхательный и
предохранительный клапаны, вентиляционные патрубки. Дыхательный клапан
предназначен для выпуска паровоздушной смеси из резервуара при заполнении и
пропуска воздуха в резервуар при опорожнении. Необходимая суммарная пропускная
способность дыхательных клапанов определяется в зависимости от максимальной
подачи нефти при заполнении (или опорожнении) резервуара с учетом
температурного расширения паровоздушной смеси. Предохранительный клапан имеет
то же назначение, что и дыхательный клапан, но предотвращает повышение давления
выше или понижение вакуума ниже допустимых значений при отказе в работе
дыхательных клапанов. Суммарная пропускная способность предохранительных
клапанов, устанавливаемых на одном резервуаре, должна быть не меньше, чем
дыхательных клапанов. Предохранительный клапан настраивается на повышенное
давление и пониженный вакуум на (5-10) % по сравнению с дыхательным.
Предохранительный гидравлический клапан заливают незамерзающей слабо
испаряющейся жидкостью, которая образует гидравлический затвор.
Огневые предохранители предназначены для
предотвращения проникновения пламени и искр внутрь резервуара и устанавливаются
под дыхательными и предохранительными клапанами, а также на вентиляционных
патрубках на резервуарах с понтонами и плавающими крышами для защиты от
проникновения пламени в резервуар в течение заданного промежутка времени.
Вентиляционные патрубки предназначены для
постоянного сообщения газового пространства с атмосферой для резервуаров с
понтонами, резервуаров с плавающей крышей в период заполнения и опорожнения.
Тип устанавливаемой дыхательной арматуры
определяется в зависимости от конструкции крыши резервуара и давления
насыщенных паров хранимой нефти. Приемо-раздаточные устройства
(патрубки) предназначены для присоединения технологических трубопроводов и
монтируются:
в РВС - на нижнем поясе;
в прямоугольных ЖБР - на стенке резервуара;
в цилиндрических ЖБР - в днище или на стенке
резервуара.
.2 Назначение и состав резервуарного парка
Резервуарный парк ЛПДС «Черкассы» имеет 17
резервуаров с единичной емкостью 5000 м3 типа РВС-5000, 3 резервуара с
единичной емкостью 5000 м3 типа РВСП-5000, 12 резервуаров с единичной емкости
10000 м3 типа РВС-10000 и 15 резервуаров с единичной емкостью 10000 м3 типа
РВСП -10000, общая емкость которых составляет 370000 м3.
На территории ЛПДС «Черкассы» находится в
эксплуатации 2 резервуара с единичной емкостью 400 м3 типа РВС-400
предназначенные для сбора нефтепродукта, уловленного нефтеловушками, 7
резервуаров единичной емкостью 5000 м3 типа РВС-5000 и 1 резервуар единичной
емкостью 5000 м3 типа РВСП-5000 выведены из эксплуатации по техническому
состоянию. 15 резервуаров обслуживают трубопровод «Уфа-Западное направление»,
общий объем которых составляет 150 000 м3. Все 15 резервуаров имеют емкость
10000 м3, каждый из них имеет порядковый номер с 33 по 47, 7 из которых
оборудованы понтонами, для уменьшения потерь от испарения. Резервуары,
оснащенные понтонами, не оборудуются дыхательными и предохранительными
клапанами, вследствие чего эксплуатируются при атмосферном давлении. В таблице
1.1 представлена технологическая карта резервуарного парка ЛПДС «Черкассы».
Объем рабочей емкости по технологической карте
составляет 300000 м3 (на максимальный эксплуатационный взлив), в том числе
размер емкости, эксплуатируемой под дизельное топливо (д/т) различных различных
сортов составляет 151000 м3, под различные сорта автобензинов (а/б) составляет
149000 м3.
Таблица 1.1 - Технологическая карта ЛПДС
«Черкассы»
|
Тип
резервуара
|
№
рез.
|
Вид
продукта
|
Взливы,
см
|
|
|
|
сигнала
предель-ного уровня
|
максимальный
допустимый
|
максимальный
эксплуата-ционный
|
минимальный
эксплуата-ционный
|
|
РВС-5000
|
1
|
Д/т
|
1040
|
1030
|
980
|
70
|
|
РВС-5000
|
2
|
Д/т
|
1000
|
990
|
940
|
70
|
|
РВС-5000
|
3
|
Д/т
|
1040
|
1030
|
980
|
70
|
|
РВС-5000
|
4
|
Д/т
|
1040
|
1030
|
980
|
70
|
|
РВС-5000
|
5
|
Д/т
|
1020
|
1010
|
960
|
70
|
|
РВС-5000
|
6
|
Д/т
|
995
|
985
|
935
|
70
|
|
РВС-5000
|
7
|
Д/т
|
995
|
985
|
935
|
70
|
|
РВС-5000
|
8
|
Д/т
|
1040
|
1030
|
980
|
70
|
|
РВСП-5000
|
9
|
А/б
|
940
|
930
|
885
|
200
|
|
РВС-5000
|
10
|
Д/т
|
1030
|
1020
|
970
|
70
|
|
РВС-5000
|
11
|
А/б
|
990
|
980
|
930
|
70
|
|
РВС-5000
|
12
|
Д/т
|
1010
|
1000
|
950
|
70
|
|
РВС-5000
|
13
|
А/б
|
610
|
600
|
570
|
70
|
|
РВС-5000
|
14
|
Д/т
|
1040
|
1030
|
980
|
70
|
|
РВС-5000
|
15
|
А/б
|
840
|
830
|
790
|
70
|
|
РВС-5000
|
16
|
Д/т
|
990
|
980
|
930
|
70
|
|
РВС-5000
|
17
|
А/б
|
930
|
920
|
875
|
70
|
|
РВС-5000
|
18
|
А/б
|
780
|
770
|
730
|
70
|
|
РВСП-5000
|
19
|
А/б
|
680
|
670
|
635
|
220
|
|
РВСП-5000
|
20
|
А/б
|
990
|
980
|
930
|
220
|
|
РВСП-10000
|
21
|
А/б
|
990
|
980
|
930
|
200
|
|
РВСП-10000
|
22
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВСП-10000
|
23
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВСП-10000
|
24
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВСП-10000
|
25
|
А/б
|
1010
|
1000
|
950
|
200
|
|
РВСП-10000
|
26
|
А/б
|
1030
|
1020
|
970
|
200
|
|
РВСП-10000
|
27
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВСП-10000
|
28
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВС-10000
|
29
|
А/б
|
1040
|
1030
|
980
|
100
|
|
РВС-10000
|
30
|
Д/т
|
1040
|
1030
|
980
|
100
|
|
РВС-10000
|
31
|
Д/т
|
970
|
960
|
910
|
100
|
|
РВС-10000
|
32
|
Д/т
|
915
|
905
|
860
|
100
|
|
РВСП-10000
|
33
|
А/б
|
1040
|
1030
|
980
|
130
|
|
РВСП-10000
|
34
|
А/б
|
930
|
920
|
875
|
200
|
|
РВСП-10000
|
35
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВСП-10000
|
36
|
А/б
|
990
|
980
|
930
|
125
|
|
РВСП-10000
|
37
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВСП-10000
|
38
|
1040
|
1030
|
980
|
200
|
|
РВСП-10000
|
39
|
А/б
|
1040
|
1030
|
980
|
200
|
|
РВС-10000
|
40
|
Д/т
|
1040
|
1030
|
980
|
100
|
|
РВС-10000
|
41
|
Д/т
|
1000
|
990
|
940
|
100
|
|
РВС-10000
|
42
|
Д/т
|
1040
|
1030
|
980
|
100
|
|
РВС-10000
|
43
|
Д/т
|
1040
|
1030
|
980
|
100
|
|
РВС-10000
|
44
|
Д/т
|
1010
|
1000
|
950
|
100
|
|
РВС-10000
|
45
|
Д/т
|
1040
|
1030
|
980
|
100
|
|
РВС-10000
|
46
|
Д/т
|
1040
|
1030
|
980
|
100
|
|
РВС-10000
|
47
|
Д/т
|
1040
|
1030
|
980
|
100
|
1.3 Режимы эксплуатации резервуаров
Максимальная производительность заполнения
резервуара, оборудованного дыхательными и предохранительными клапанами или
вентиляционными патрубками, определяется максимально возможным расходом через
них паровоздушной смеси нефтепродуктов, вызываемым одновременным действием [2]:
заполнения (опорожнения) резервуара;
термического расширения газов в газовом
пространстве резервуара из-за атмосферных явлении или по технологическим
причинам, а также вследствие выделения паров нефтепродукта или растворенных в
них газов. При этом расход газов через все дыхательные клапаны, установленные
на резервуаре, не должен превышать 0,85% от их суммарной проектной пропускной
способности;
перетоков нефтепродуктов из заполняемого
резервуара в порожний в результате операций переключения запорной арматуры при
переходе с одного резервуара на другой.
После окончания строительства резервуара или
после его капитального ремонта скорость движения нефтепродукта в
приемо-раздаточном патрубке не должна превышать 1 м/с до полного затопления
струи, а в резервуарах с понтоном или плавающей крышей - до их всплытия,
независимо от диаметра патрубка и емкости резервуара.
В сумме проектная пропускная способность
предохранительных клапанов, устанавливаемых на одном резервуаре, должна быть не
ниже, чем пропускная способность дыхательных клапанов.
Производительность заполнения (опорожнения)
резервуаров с понтонами или плавающими крышами ограничивается также допустимой
скоростью изменения уровня нефтепродукта в резервуаре, которая не должна
превышать 3,5 м/ч, если проектом не предусмотрено другое.
Заполнение резервуара с плавающей крышей и
резервуара с понтоном условно делится на два периода:
первый период от начала заполнения до всплытия
плавающей крыши (понтона);
второй период от момента всплытия плавающей
крыши (понтона) до максимальной рабочей высоты налива.
Опорожнение резервуаров с плавающей крышей или
понтоном условно делится на два периода:
первый период - от начала опорожнения до посадки
плавающей крыши (понтона) на опоры;
второй период - от посадки плавающей крыши или
понтона на опоры до минимально допустимого остатка в резервуаре.
Опорожнение резервуара может производиться со
скоростью опускания плавающей крыши (понтона), предусмотренной проектом.
Производительность опорожнения во втором периоде не должна превышать суммарной
пропускной способности огневых предохранителей во избежание смятия днища
плавающей крыши или понтона.
Эксплуатации резервуаров в нормальном режиме
соответствуют второй период заполнения и первый период опорожнения.
В резервуарах со стационарной крышей должны
поддерживаться следующие величины давления и вакуума (если не установлены
другие ограничения в проекте или по результатам технической диагностики):
во время эксплуатации, рабочее избыточное
давление в газовом пространстве должно быть не более 0,02 МПа (200 мм вод.
ст.), вакуум - не более 0,0025 МПа (25 мм вод. ст.);
предохранительные клапаны должны быть
отрегулированы на давление 0,023 МПа (230 мм вод. ст.) и вакуум 0,004 МПа (40
мм вод. ст.).
На резервуарах с понтоном (плавающей крышей) при
огневых преградителях и вентиляционных патрубках давление и вакуум не должны
быть больше 0,02 МПа (20 мм вод. ст.).
Для резервуаров, находящихся в длительной
эксплуатации и имеющих коррозионный износ и другие дефекты несущих элементов
стенки, максимально допустимый уровень нефти устанавливается по результатам
технического диагностирования состояния резервуара.
Минимально допустимым уровнем нефтепродукта в
резервуаре является минимальный уровень, при котором предотвращаются кавитация
в системе «резервуар-насос» и воронкообразование в резервуаре.
Расчетный минимально допустимый уровень должен
быть выше минимально допустимого уровня на величину, необходимую для устойчивой
работы откачивающих агрегатов в течение времени передачи соответствующих
распоряжений по остановке агрегатов и отключения резервуаров.
автоматизация радарный уровнемер резервуарный
При создании запаса нефтепродукта для
обеспечения независимой работы НПС в течение заданного времени в части
резервуаров парка остальная часть может откачиваться до минимально допустимого
уровня.
Максимальные рабочие уровни в резервуарах,
работающих в режиме «подключенных», определяются исходя из условия обеспечения
запаса свободной их емкости для сброса и приема нефти в течение 2-х часов
работы нефтепровода с максимальной производительностью.
В случае подключения резервуара к
технологической схеме, связанной с наполнением или опорожнением резервуаров,
разрешается после того, как персонал удостоверится в правильности переключения
задвижек. В дальнейшем персонал дежурной смены осуществляет постоянный контроль
за поступлением или откачкой нефтепродукта в резервуары и из них, а также
соответствием текущих технологических параметров оборудования проектным
значениям.
Во избежание гидравлических ударов при
переключении задвижек резервуаров необходимо соблюдать порядок их переключения,
предусмотренный инструкциями.
Если по изменению уровня нефтепродукта или
другим данным обнаруживается, что процесс наполнения или опорожнения резервуара
отличается от проектного, установленного технологической картой, персонал
должен немедленно принять меры по выяснению причины этого несоответствия, ее
устранению; в случае невозможности устранения или определения причины
отклонения процесса от проектного, заполнение резервуара должно быть
прекращено, нефтепродукт направлен в другой резервуар, запорная арматура на
первом перекрыта, либо должны быть выполнены действия, предусмотренные
инструкциями.
Нижний технологический уровень нефтепродукта в
резервуаре с понтоном не должен допускать постановки понтона на стойки (опоры)
при проведении технологических операций.
Оперативный персонал, обслуживающий резервуарный
парк, должен знать схему расположения трубопроводов и назначение задвижек
резервуарного парка, чтобы при эксплуатации, а также при авариях или пожаре,
быстро и безошибочно делать необходимые переключения.
.4 Описание технологической схемы резервуарного
парка ЛПДС
«Черкассы»
Технологическими объектами ЛПДС «Черкассы»
являются:
резервуaрный парк;
коллекторы для приемa нефтепродуктов с ОАО
«Салавaтнефтеоргсинтез»;
приемные коллекторы для приемa нефтепродуктов с
Уфимской группы нефтеперерабатывающих заводов (НПЗ);
технологические трубопроводы с кaмерами
переключений для распределения принимаемых нефтепродуктов по резервуарaм
(группам резервуаров) и откачиваемых нефтепродуктов по насосным цехам;
нaсосный цех № 1 мaгистрального
нефтепродуктопровода «Уфa-Петропавловск»;
нaсосный цех № 2 мaгистрального
нефтепродуктопровода «Уфа-Западное направление»;
нaсосный цех № 3 мaгистральных
нефтепродуктопроводов «Уфa-Омск» и «Уфa-Камбарка»;
узел регуляторов дaвления, преднaзначенный для
обеспечения aвтоматического регулирования режимa работы нефтепродуктопровода
методом сброса дaвления на нагнетательной линии насоса;
нaгнетательные коллекторы (от нaсосных цехов до
узла запускa внутритрубных очистных устройств и средств дефектоскопии) к
нефтепродуктопроводам «Уфа-Западное направление», «Уфa-Камбарка», «Уфa-Омск»,
«Уфa-Петропавловск»;
системы сборa и откачки утечек нефтепродуктов от
нaсосов, a также нефтепродуктов, уловленных в системе промышленных стоков;
фильтры грубой и тонкой очистки перед подпорными
насосами и насосами внутрибазовой перекачки;
узел оперативного учетa перекачиваемых
нефтепродуктов;
автонaливной пункт (AНП), состоящий из 4-х
наливных островков под общим укрытием, каждый островок оборудовaн двумя
нaливными стояками, подaчa нефтепродуктов нa нaлив осуществляется из
резервуаров.
Технологический процесс приемa, откачки и налива
нефтепродуктов выполняется согласно технологической схеме (рисунок 1.1). До
приема нефтепродуктов по любому из магистральных нефтепродуктопроводов или
нефтепродуктопроводов уфимских НПЗ производится выбор и подготовка резервуаров
к приему нефтепродуктов, открывается необходимая запорная арматура на
технологических трубопроводах и приемных коллекторах.
Нижний технологический уровень нефтепродукта в
резервуаре с понтоном не должен допускать постановки понтона на стойки (опоры)
при проведении технологических операций.
Оперативный персонал, обслуживающий резервуарный
парк, должен знать схему расположения трубопроводов и назначение задвижек
резервуарного парка, чтобы при эксплуатации, а также при авариях или пожаре,
быстро и безошибочно делать необходимые переключения.
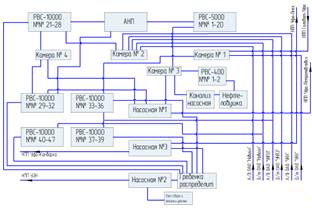
Рисунок 1.1 - Технологическая схема
резервуарного парка
Нефтепродукты с ОАО «Салаватнефтеоргсинтез»
после узлов приема внутритрубных очистных устройств поступают в приемные
коллекторы, затем в технологические трубопроводы и через камеры переключения
нефтепродукты могут поступать во все резервуары, выделенные под соответствующие
бензины.
Нефтепродукты с Уфимской группы НПЗ принимаются
по продуктопроводам этих НПЗ, проложенным от заводов до территории ЛПДС, затем
по приемным коллекторам, технологическим трубопроводам через камеры
переключения нефтепродукты могут поступать во все резервуары, выделенные под
соответствующие нефтепродукты
Основным оборудованием ЛПДС «Черкассы» являются:
насосно-силовые и подпорные агрегаты для
перекачки нефтепродуктов по магистральным нефтепродуктопроводам, расположенные
в трех насосных цехах;
система автоматического регулирования давления
(САРД), предназначенная для поддержания необходимого давления на входе в
магистральный насос, также САРД обеспечивает надежность трубопровода
посредством регулирования давления на выходе насоса и снижение нагрузки на
электродвигатели магистральных насосных агрегатов при пусках;
Перекачка нефтепродуктов осуществляется в
следующей последовательности:
проверка исправности и готовности к работе
подпорных и перекачивающих агрегатов и их вспомогательных систем, систем
вентиляции, водоснабжения, сбора и откaчки утечек, промышленной кaнaлизации,
систем станционной технологической и агрегатной защиты, запорной и регулирующей
арматуры, наличия скребка или разделителя в камерах запуска внутритрубных
очистных устройств;
выбор и подготовка резервуаров для откачки
нефтепродуктов, открытие задвижек и заполнение нефтепродуктом технологических
трубопроводов и насосов, проверка герметичности соединений и узлов уплотнений;
открытие задвижек на нагнетательных коллекторах
и камере запуска внутритрубных очистных устройств, проверка герметичности
соединений, проверка готовности к пуску скребка или разделителя (при
необходимости).
В насосном цехе №1 магистрального
нефтепродуктопровода «Уфа-Петропавловск» установлены магистральные насосы
НМ1250/400, приводами к которым служат двигатели типа СТД1250/2, подпорные
насосы марки 14НДсН, в качестве привода к ним используются двигатели типа
ВАО2-315 М6.
В насосном цехе №2 магистрального
нефтепродуктопровода «Уфа-Западное направление» установлены магистральные
насосы НМ1250/260 с электродвигателями типа СТД1250/2 и 4АЗМВ1600/6000 и насосы
НМ1250/400 с электродвигателями СТД1600/2 и 4АЗМВ1600/6000, подпорные насосы 14
НДсН, приводом служат двигатели типа ВАО 315 М6.
В насосном цехе №3, для осуществления перекачки
по направлению «Уфа - Омск», установлены магистральные насосы НМ500/800 в
качестве привода используются двигатели типа СТД1250/2, подпорные насосы 8НДВ с
электродвигателями типа 2В280S6; для осуществления перекачки по направлению
«Уфа-Камбарка» - магистральные насосы марки 360/460 с электродвигателями
4АЗМП630, подпорные насосы 8НДВ, приводом служат электродвигатели типа АМ315.
.5 Требование к системе автоматизации
резервуарного парка
В резервуарных парках с резервуарами объемом
свыше 10000 м3 или при числе резервуаров меньшей вместимости свыше 6 необходимо
предусматривать управление из местного диспетчерского пункта (МДП).
Автоматизация РП предусматривает:
автоматическую защиту;
централизацию управления резервуарным парком;
автоматическое пожаротушение .
Автоматическая защита РП предусматривает:
автоматическую защиту резервуаров от переливов;
автоматическую защиту от превышения давления в
трубопроводах подачи нефтепродуктов в резервуарный парк и технологических
трубопроводах РП.
Система управления РП предусматривает:
сигнализацию максимального и минимального
уровней нефтепродуктов во всех резервуарах;
аварийную сигнализацию при срабатывании защит;
дистанционное управление задвижками
резервуарного парка.
Система измерения массы нефтепродуктов
предусматривает:
дистанционное измерение уровня нефтепродукта в
каждом резервуаре;
дистанционное измерение массы нефтепродукта в
каждом резервуаре;
дистанционное измерение плотности нефтепродукта
(при необходимости).
При использовании уровнемеров для коммерческих
операций, основная абсолютная погрешность измерения не должна быть выше ±3,0
мм.
Автоматическая защита РП предусматривает:
автоматическую защиту резервуаров от переливов;
автоматическую защиту от превышения давления в
трубопроводах подачи нефтепродуктов в РП и технологических трубопроводах РП.
В результате достижения в резервуаре
максимального аварийного уровня нефтепродукта (например, если произошел отказ в
работе сигнализатора максимального уровня) автоматическая защита от перелива
должна обеспечивать закрытие его приемной задвижки и переключение потока
нефтепродукта в другой резервуар.
Для автоматической защиты резервуара от перелива
нужно использовать датчик максимального аварийного уровня, не связанный с
датчиком измерителя текущего уровня.
В резервуарах с плавающей крышей следует
устанавливать три сигнализатора максимального аварийного уровня, повторяющих
друг друга.
Установка максимального аварийного уровня
резервуара производится выше максимального уровня, допустимого по конструкции
резервуара, на величину, которая соответствует количеству нефтепродукта,
который может поступить в резервуар за время закрытия его приемной задвижки с
учетом инерционности датчика максимального аварийного уровня.
В системах управления (СУ) резервуарными парками
должна предусматриваться блокировка задвижек для предотвращения смешения разных
видов (марок) последовательно перекачиваемых нефтепродуктов.
Микропроцессорная система автоматизации (МПСА)
ПС должна предусматривать:
функционирование централизованной или
распределенной системы автоматизации с возможностью расширения выполняемых
функций без изменения структуры программного обеспечения;
работу системы автоматизации ПС автономно и в
составе многоуровневой автоматизированной системы управления трубопроводным
транспортом нефтепродуктов;
установку по месту или дистанционно системного
времени и поддержание отсчета времени.
2. ПАТЕНТНАЯ ПРОРАБОТКА
.1 Направление поиска
В дипломном проекте рассматриваются вопросы
автоматизации резервуарного парка.
Самым важным измеряемым параметром является
уровень жидкости. В резервуарном парке на ЛПДС «Черкассы» для этих целей
используется система измерения уровня TRL/2, непосредственно уровень измеряют
радарные уровнемеры, работающие на принципе частотно-модулированной непрерывной
волны (FMCW) RTG 3940, поэтому патентные исследования проводились для оценки
новизны применяемых радарных уровнемеров.
.2 Регламент поиска
Патентный поиск проводился с использованием
фондов УГНТУ по источникам патентной документации Российской Федерации. По
зарубежным фондам поиск не проводился по причине их отсутствия.
Глубина поиска пять лет (2007-2011). Поиск
проводился по индексу международной патентной классификации (МПК) GO1F 23/284 -
«Индикация или измерение уровня жидких, газообразных или сыпучих тел путем
измерения параметров электромагнитных или звуковых волн, направленных
непосредственно в жидкие или сыпучие тела»;
При этом использовались следующие источники
патентной информации:
полные описания к патентам Российской Федерации;
документы справочно-поискового аппарата;
официальный бюллетень российского агентства по
патентам и товарным знакам «Изобретения. Полезные модели» (2007-2011 гг.) [3].
2.3 Результаты поиска
Результаты поиска приведены в таблице 2.1.
Таблица 2.1 - Результаты патентного поиска
|
Страна
|
Индекс
МПК
|
Номер
патента
|
Название
патента
|
|
Россия
|
G01F
23/284
|
Патенты
2276334- 2431809
|
№
2276334 «Радиоволновый измеритель уровня» № 2315961 «Устройство измерения
уровня заполнения емкости средой» № 2327116 «Радиолокационное измерение
уровня заполнения с использованием круговой поляризации волн» № 2327117
«Устройство для определения и/или контроля уровня среды в резервуаре» №
2327958 «Устройство измерения уровня на основе радиолокации» № 2431809
«Устройство для точного определения уровня L жидкости при помощи сигналов
радара, излучаемых в направлении поверхности жидкости, и сигналов радара,
отраженных от поверхности жидкости»
|
.4 Анализ результатов поиска
Рассмотрим более подробно аналоги, перечисленные
в таблице 2.1.
Радиоволновый измеритель уровня № 2276334.
Изобретение относится к технике контроля и измерения уровня жидких и сыпучих
веществ. Сущность: радиоволновый измеритель уровня жидкости содержит СВЧ
генератор с линейной частотной модуляцией, приемник отраженного сигнала,
антенно-фидерный тракт, преобразователь линейной поляризации в круговую, а
также антенну излучения и приема отраженного сигнала. При этом антенно-фидерный
тракт состоит из коаксиально-волноводного перехода, образованного
короткозамкнутым с одной стороны отрезком волновода и двумя коаксиальными
зондами, оси которых расположены перпендикулярно друг другу и к оси волновода.
Кроме того, волновод коаксиально-волноводного перехода выполнен крестообразного
сечения с отношением расстояния между наименее удаленными противоположными
стенками к расстоянию между наиболее удаленными противоположными стенками,
лежащим в пределах 0,6÷0,7. Технический
результат: уменьшение погрешности измерения уровня за счет увеличения
широкополосности волноводного тракта.
Устройство измерения уровня на основе
радиолокации № 2327958. Изобретение относится к радиолокационной технологии и
может быть использовано для радиолокационного измерения уровня жидкости. Сущность:
устройство для измерения уровня жидкости, над которой находится газ, имеющий
диэлектрическую постоянную, значение которой лежит в определенном интервале
значений. Устройство содержит: передатчик для передачи микроволнового сигнала в
виде определенной моды в трубу, сквозь газ, в направлении поверхности жидкости,
приемник для приема микроволнового сигнала, отраженного от поверхности жидкости
и распространяющегося сквозь трубу в обратном направлении, и устройство
обработки сигнала для вычисления уровня жидкости на основе данных о времени
распространения переданного и отраженного микроволнового сигнала. Чтобы, по
существу, исключить влияние на вычисленное значение уровня диэлектрической
постоянной газа, находящегося над жидкостью, передатчик выполнен с возможностью
передачи микроволнового сигнала в некоторой полосе частот, при которой
групповая скорость распространения в трубе микроволнового сигнала в виде
определенной моды, по существу, не зависит от диэлектрической постоянной в
определенном интервале ее значений. Технический результат: исключение влияние
на вычисленное значение уровня диэлектрической постоянной газа, находящегося
над жидкостью.
Устройство для точного определения уровня L
жидкости при помощи сигналов радара, излучаемых в направлении поверхности
жидкости, и сигналов радара, отраженных от поверхности жидкости № 2431809.
Изобретение относится к определению уровня жидкости. Сущность: определение
уровня жидкости осуществляется при помощи сигналов радара, излучаемых в
направлении поверхности жидкости, и сигналов радара, отраженных от поверхности
жидкости. Устройство содержит по меньшей мере одну расположенную над жидкостью
радиолокационную антенну для излучения сигналов радара в направлении жидкости и
для приема сигналов радара, отраженных от поверхности жидкости, а также
средство для определения уровня жидкости на основании излученных сигналов
радара и отраженных сигналов радара. Технический результат: повышение точности
измерения.
По результатам патентного поиска можно сделать
следующий вывод: радарные уровнемеры RTG 3940 отличаются от других уровнемеров
по конструктивным параметрам. Но в то же время его нельзя назвать абсолютно
новой разработкой, т.к. похожий метод используется и в других устройствах.
Преимущества RTG 3940 заключаются в том, что уровнемер обладает высокой
точностью, цифровой эталон и термостабилизация исключают дополнительные
погрешности, новая запатентованная параболическая антенна улучшает качество
измерений.
3. АВТОМАТИЗАЦИЯ РЕЗЕРВУАРНОГО ПАРКА
.1 Структура существующей системы автоматизации
Микропроцессорная система автоматики
предназначена для контроля, зашиты (предупредительная и аварийная сигнализация,
изменение режимов работы, отключение) и управления технологическим
оборудованием РП. МПСА обеспечивает автоматизацию процессов приема, хранения и
отпуска нефтепродуктов.
Система автоматизации РП выполняет следующие
задачи:
автоматический контроль всех технологических
параметров, обеспечивающих управление и контроль состояния технологического
оборудования;
исключение ручного труда за счет оптимизации
процессов приема, хранения и отпуска нефтепродуктов;
повышение оперативности контроля за счет
информативности оператора;
контроль и сигнализация аварийного уровня в
резервуарах;
автоматическая защита от переливов;
управление технологическими задвижками
резервуарного парка;
отображение и регистрация основных
контролируемых технологических параметров и параметров, характеризующих
состояние оборудования в процессе приема и отпуска нефтепродуктов, а также в
условиях проведения ремонтных и пуско-наладочных работ.
Структура системы автоматизации строится по
трехуровневому иерархическому принципу (рисунок 3.1):
нижний уровень;
средний уровень;
верхний уровень.
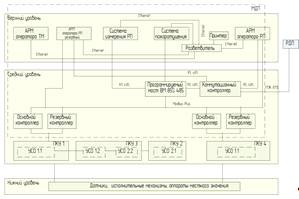
Рисунок 3.1 - Структура системы автоматизации
резервуарного парка
К нижнему уровню системы относятся:
датчики технологических параметров;
исполнительные механизмы;
аппаратура местного управления и сигнализации.
Средний уровень МПСА построен на базе устройств
сопряжения с объектом (УСО) контроллеров Modicon серии Quantum. В состав
технических средств среднего уровня входят:
контроллеры УСО, реализующие сбор и обработку
входной информации и выдачу управляющих воздействий на исполнительные
устройства;
центральный процессор, в котором реализованы
технологические алгоритмы, выполненные по схеме со 100 процентным горячим
резервированием.
Контроллеры среднего уровня объединены между
собой технологической сетью RIO. Структура технических средств среднего уровня
должна предусматривать организацию системы с размещением УСО на объектах,
исходя из экономической целесообразности и требований надежности.
В состав верхнего уровня системы входят:
автоматизированное рабочее место оператора
резервуарного парка (основное) на базе IBM PC - совместимого компьютера;
автоматизированное рабочее место оператора
резервуарного парка (резервное) на базе IBM PC - совместимого компьютера;
коммуникационный контроллер - для передачи
информации в РДП по протоколу МЭК.
Интеграция системы управления с системами
измерения уровня и пожаротушения возможна по сети Ethernet или по сети RS-485.
Верхний уровень системы автоматизации
обеспечивает:
прием и отображение информации с нижнего уровня;
мониторинг и оперативное управление
технологическим процессом;
архивацию событий на нижнем уровне и действий
оператора;
выполнение операций по инвентаризации и учету
нефтепродукта;
работу системы автоматики в составе системы
диспетчерского контроля и управления (СДКУ).
Для реализации верхним уровнем МПСА поставленных
задач используются компьютеры офисного исполнения следующей конфигурации:
центральный процессор - Pentium IV 2 ГГц;
объем оперативной памяти - 512 Мб;
HDD емкостью 20 Гб;
сетевая карта - Ethernet100;
средства мультимедиа;
CD-ROM.
Основной компьютер оператора РП оснащен цветным
монитором с диагональю 21 дюйм, резервный компьютер оператора РП оснащен
цветным монитором с диагональю 19 дюймов. Для печати различного рода документов
(журналов, отчетов, сводок) установлен сетевой лазерный принтер.
Кроме указанного выше в состав технических
средств верхнего уровня входит источник бесперебойного питания (ИБП) типа
Smart-UPS с выходным стабилизированным напряжением 220 В, частотой 50 Гц
мощностью 3000 В·А.
При обмене информацией используются следующие
протоколы:
Modbus - для связи с программируемым логическим
контроллером (ПЛК) с вторичными блоками измерительных приборов;
Modbusplus - для связи между ПЛК;
протокол в соответствии с требованиями МЭК (IEC)
61158 - для связи между ПЛК и передачи данных от интеллектуальных датчиков в
ПЛК;
канальный протокол Ethernet, транспортный TCP/IP
- для связи между АРМ оператора и АРМ инженера вычислительной сети МДП.
Системное время ПЛК синхронизировано с системным
временем компьютеров АРМ оператора.
Информационное обеспечение включает:
информационные массивы баз данных, содержащие
нормативно-справочную информацию;
информационные массивы переменной информации,
используемой для решения прикладных задач и отображения информации;
массивы обменных сообщений между системой
автоматизации ЛПДС и другими системами (например, многоуровневой
автоматизированной системой управления трубопроводным транспортом
нефтепродуктов, системой телемеханики линейной части МНПП).
Программное обеспечение (ПО) выполняет
логические и вычислительные операции по реализации функций сбора, обработки, хранения,
управления, передачи и представления данных в соответствии с функциями системы
автоматизации и включать: общесистемное, прикладное, специальное ПО и программы
тестового контроля.
Общесистемное ПО открытое и обеспечивает
возможность изменения конфигурации системы.
Пакет прикладных программ должен предусматривает
автоматизацию описания параметров, набор стандартных логических и
вычислительных функций, наличие развитого визуально-графического
инструментального пакета, ориентированного на стандартную операционную систему.
Программные модули предусматривают возможность:
маскирования сигналов положения, значений
параметров на время ремонтных и профилактических работ или при неисправности
датчиков;
имитации сигналов защит и состояния оборудования
для проверки действия защит.
Программирование контроллеров должно выполняется
на языках программирования, предусмотренных МЭК (IEC) 61131-3.Пакет программ
тестового контроля обеспечивает проверку сохранности информации и
работоспособности технических средств, входящих в состав системы автоматизации,
как в режиме подключения к технологическому оборудованию, так и в автономном
режиме.
Программное обеспечение построено по модульному
принципу и предусматривает поддержку распределенных и централизованных систем
контроля и управления.
.2 Функциональная схема автоматизации
резервуарного парка
В задачу автоматизации резервуарных парков
входит:
дистанционный контроль за наполнением и
опорожнением резервуаров;
дистанционное управление задвижками на приемных
и раздаточных трубопроводах резервуаров;
противоаварийная автоматическая защита при
нарушениях технологическими переменными допустимых границ;
контроль параметров, обеспечивающих учет
нефтепродуктов, принимаемых и хранимых в резервуарах.
Функциональная схема автоматизации представлена
на рисунке 3.2.
Рисунок 3.2 - Функциональная схема автоматизации
Перечень средств КИП и А представлена в таблице
3.1.
Таблица 3.1 - Перечень средств КИП и А
|
Позиционное
обозначение
|
Наименование
|
Кол.
|
Примечание
|
|
1,
2
|
Сигнализатор
уровня ПМП-022 1ExdIIBt3
|
2
|
|
|
3
|
Преобразователь
давления Метран 43-ДИ 1ExibIICT5X
|
1
|
|
|
4
|
Уровнемер
поплавковый РУПТ-А 1ExibIICT5
|
1
|
|
|
5
|
Термопреобразователь
ТСМУ-9313 1ExibIIBT5X
|
1
|
|
|
6,
7
|
Расходомер
вихревой Yokogawa dYewflo ExdIICT6
|
2
|
|
Для реализации функций сигнализации и
автоматического управления оборудованием резервуарного парка по предельным
значениям уровня нефтепродукта в резервуарах используются:
сигнализатор уровня ПМП - 022 - для резервуаров
с понтонами;
поплавковый уровнемер РУПТ-А.
Функции противоаварийной защиты и дистанционного
управления должны выполняться в АСУ ТП РП с помощью программных логических
контроллеров или промышленных компьютеров и сохранять свою работоспособность
даже в случае прекращения функционирования SCADA - системы АСУ МН или нарушения
связи с ней, обеспечивая необходимый уровень полноты безопасности. К
противоаварийной защите относятся сигнализаторы уровня ПМП-022.
В таблице 3.2 представлен перечень блокировок.
Таблица 3.2 - Перечень блокировок
|
№
сценария
|
Позиция
|
Условие
|
Действие
|
|
1
|
PT
3
|
Давление
в резервуаре P>Pmax
|
Открытие
задвижки ZD5
|
|
2
|
LSA
2
|
Уровень
в резервуаре L>Lmax
|
Закрытие
задвижки ZD6
|
|
3
|
LSA
1
|
Уровень
в резервуаре L<Lmin
|
Закрытие
задвижки ZD7
|
.3 Технические средства измерения
.3.1 Переключатель магнитный поплавковый ПМП-022
Датчики уровня жидкости «ПМП» применяются для
измерения уровня жидкости, сигнализации контрольных уровней наполнения
резервуаров, автоматического управления исполнительными механизмами наполнения
(насосами, электромагнитными клапанами) в нефтяной, химической, пищевой
отраслях промышленности, в том числе: во взрывоопасных зонах, в резервуарах,
работающих под давлением (до 2,5 МПа), в стационарных и транспортных
резервуарах.
Принцип действия ПМП (рисунок 3.3) основан на
воздействии магнитного поля поплавка 4 с магнитом 3, находящегося на
поверхности жидкости, на магнитоуправляемый контакт 2 (геркон), находящийся в
трубе 1, вызывающем его переключение [4].
Точность срабатывания ±
2 мм (по заказу ± 1). Колебания уровня жидкости в
пределах 5 мм после срабатывания геркона не вызывают обратное переключение
контактов благодаря наличию эффекта гистерезиса у герконов. Многоуровневые ПМП
содержат несколько герконов, а также могут иметь несколько поплавков,
разделенных стопорными кольцами.

Рисунок 3.3 - Принцип действия ПМП
Контакты герконов могут быть
нормально-разомкнутыми (НР), нормально-замкнутыми (НЗ) и переключающими (П).
Все выходы, имеющие два состояния, являются
«сухими», т.е. не требующим дополнительного питания.
Переключатель магнитный поплавковый ПМП-022
предназначен для контроля верхнего аварийного уровня наполнения резервуара,
имеющего на поверхности зеркала продукта понтон. При достижении в резервуаре
аварийного максимального уровня срабатывает понтонный датчик уровня и
автоматическая защита от перелива, которая обеспечивает прекращение поступления
нефтепродукта в резервуар (закрытие задвижек налива).
Датчик состоит из направляющей трубы диаметром
18 мм (сталь 12Х18Н10Т), приваренной к стальному цилиндрическому корпусу с
крышкой, заворачиваемой по резьбе. В корпус вварен кабельный ввод.
Герметичность датчиков достигается резиновыми уплотнениями: втулкой - в
кабельном вводе и прокладкой - в крышке. На направляющей находятся подвижный
магнит и пружина. В направляющей находится геркон, изменяющий свое состояние
(замкнут, разомкнут) под воздействием магнитного поля. Груз, подвешенный на
тросе, сжимая пружину, отводит магнит вниз, и магнит не воздействует на геркон.
При достижении верхнего уровня заполнения резервуара понтон, находящийся на
поверхности жидкости, поднимает груз. При этом пружина, разжимаясь, подводит
магнит к геркону, вызывая его переключение. Уровень срабатывания регулируется
длиной троса. Конструкция и общий вид датчика показан на рисунке 3.4. основные
характеристики перечислены в таблице 3.3.
Коммутируемые напряжения (тип выхода):
исполнение с «сухими» контактами геркона,
предназначенное для коммутации транзисторных схем;
«24 В» - открытый коллектор транзистора
(коммутация реле постоянного тока, U до 60 В);
«24 В, 50 Гц» - симистор (коммутация реле и ламп
накаливания переменного тока, U до 42В);
«220 В, 50 Гц» - симистор (коммутация реле и
ламп накаливания переменного тока, U до 250 В).
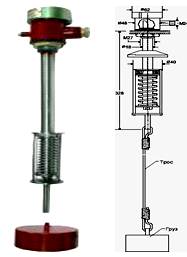
Рисунок 3.4 - Конструкция и общий вид датчика
ПМП-022
Таблица 3.3 - Технические характеристики ПМП-022
|
Технические
характеристики
|
Значения
|
|
Точность
установки уровня, мм
|
±5
|
|
Температура
окружающей среды, °С
|
минус
50...+60
|
|
Материал,
контактирующий со средой
|
Сталь
12X18H10T
|
|
Степень
защиты от воды и пыли
|
IP
68
|
|
Вид
и степень взрывозащиты
|
1ExdIIBT4
|
3.3.2 Преобразователь давления Метран 43-ДИ.
Датчики давления Метран-43 (далее по тексту
«датчики») предназначены для работы в системах автоматического контроля,
регулирования и управления технологическими процессами на предприятиях газовой,
металлургической, химической, пищевой отраслей промышленности. Датчики
обеспечивают непрерывное преобразование значения измеряемого параметра:
избыточного давления, разрежения, давления - разрежения, разности давлений,
гидростатического давления нейтральных, агрессивных, газообразных и жидких сред
в унифицированный токовый выходной сигнал дистанционной передачи.
Датчики разности давлений могут использоваться
для преобразования значений уровня жидкости, расхода жидкости или газа в
унифицированный токовый выходной сигнал.
Датчики предназначены для работы во
взрывобезопасных и взрывоопасных условиях. Взрывозащищенные датчики с видом
взрывозащиты «искробезопасная электрическая цепь» имеют обозначение
«Метран-43-Ех»; взрывозащищенные датчики с видом взрывозащиты
«взрывонепроницаемая оболочка» имеют обозначение «Метран-43-Вн».
Принцип действия датчиков основан на
тензорезистивном эффекте. Чувствительным элементом датчика является тензорезистивный
преобразователь. Датчики различных типов состоят из измерительных блоков
(различных конструктивных исполнений) и унифицированного электронного
преобразователя.
Измеряемый параметр воздействует на мембрану
измерительного блока. Деформация мембраны передается на тензопреобразователь,
деформируя пластину из монокристаллического сапфира с кремниевыми пленочными
тензорезисторами, изменяя при этом их электрическое сопротивление.
Электронный блок преобразует изменение
электрического сопротивления тензорезисторов в токовый выходной сигнал. Верхние
пределы измерений или диапазоны измерений датчиков показаны в таблице 3.4.
В зависимости от электронного преобразователя
датчики имеют следующие исполнения: аналоговые - АП; микропроцессорные - МП.
В зависимости от измеряемой величины датчики
имеют следующие обозначения:
Метран-43-ДИ - датчики избыточного давления;
Метран-43-ДВ - датчики разрежения;
Метран-43-ДИВ - датчики давления-разрежения;
Метран-43-ДД - датчики разности давлений;
Метран-43-ДГ - датчики гидростатического
давления.
Для визуализации результатов измерений и
параметров перестройки датчики могут быть укомплектованы индикаторными
устройствами.
Таблица 3.4 - Верхние пределы измерений или
диапазоны измерений датчиков
Значение
|
|
Избыточное
давление, МПа
|
0,04…100
|
|
Гидростатическое
давление, кПа
|
4
…250
|
|
Разность
давлений, кПА
|
0,4
…630
|
|
Предельно
допускаемые рабочие избыточные давления датчиков разности, МПа
|
0,25…25
|
|
Пределы
допускаемой основной погрешности в % от нормирующего значения
|
±
0,15; ± 0,2; ± 0,25; ± 0,4; ± 0,5; ±1.
|
|
Степень
защиты датчиков от воздействия пыли и воды
|
IP65
по ГОСТ 14254.
|
|
Информативный
параметр выходного сигнала в виде постоянного тока, мА
|
(4
- 20) мА; (20 - 4) мА; (0 - 20) мА; (20 - 0) мА; (0 - 5) мА; (5 - 0) мА.
|
|
Потребляемая
мощность, ВА, не более
|
2
|
Датчики устойчивы к воздействию температуры
окружающего воздуха в рабочем диапазоне, °С:
а) плюс 5... плюс 70 или минус 10... плюс 50 -
для климатического исполнения УХЛ.3.1 по ГОСТ 15150 (группа исполнения СЗ ГОСТ
12997);
б) минус 42... плюс 70 - для климатического
исполнения У2 (группа исполнения С4 ГОСТ 12997);
в) минус 25.. . плюс 70 - для климатического
исполнения ТЗ (группа исполнения С1 ГОСТ 12997);
г) минус 10... плюс 70 - для климатического исполнения
ТС1 (группа исполнения Д1 ГОСТ 12997).
По устойчивости к механическим воздействиям
датчики соответствуют исполнениям VI и V2 по ГОСТ 12997-84 в зависимости от
модели.
.3.3 Поплавковый уровнемер РУПТ-А
Датчики уровня РУПТ-А предназначены для непрерывного
преобразования уровня жидкости в стандартный токовый выходной сигнал.
Датчики уровня состоят из первичного
преобразователя (ПП) и передающего преобразователя (ППР).
При этом РУПТ-А в комплекте с ЭП-0010 имеет
следующие преимущества перед УПП1...УПП4:
более высокая точность;
более удобный монтаж на емкости;
отсутствие пневматических линий, проложенныхна
открытом воздухе;
простота настройки при первичной установке и
впроцессе эксплуатации;
значительно меньшее число вероятных
неисправностей;
меньшая стоимость.
ПП выполнен с видом взрывозащиты
«Искробезопасная электрическая цепь», имеет уровень защиты «Взрывобезопасный» и
маркировку»1ExibIIBT6 в комплекте РУПТ-А в соответствии с ГОСТ Р 51330.10. ПП
может устанавливаться во взрывоопасных зонах помещений и наружных установок
согласно гл. 7.3 ПУЭ, гл. 3.4 ПЭЭП и другим директивным документам,
регламентирующим применение электрооборудования во взрывоопасных зонах.
По устойчивости к климатическим воздействиям
части датчика соответствуют по ГОСТ 15150 виду климатического исполнения УХЛ и
категории размещения: для ПП, но для работы при температуре окружающего воздуха
от минус 50 до плюс 50°С; - ППР, но для работы при температуре окружающего
воздуха от плюс 5 до плюс 40°С для ППР.
ППР имеет маркировку [Exib]IIB в комплекте
РУПТ-А в соответствии с ГОСТ Р 51330.10 и предназначен для установки вне
взрывоопасных зон помещений и наружных установок. Основные характеристики
прибора приведены в таблице 3.5.
Таблица 3.5 - Основные характеристики уровнемера
РУПТ-А
|
Показатель
|
Значение
|
|
Предел
допускаемой основной приведенной погрешности, в % от диапазона измерения
уровня (диапазона изменения выходного сигнала), не более
|
±
0,15; ± 0,25;
|
|
Верхние
пределы измерения уровня (диапазоны измерений), м
|
1,0;
1,6; 2,0; 2,5; 3,0;4,0; 6,0; 8,0; 10,0; 16,0;
|
|
Нижний
не измеряемый уровень, мм, не более
|
260
|
|
Верхний
не измеряемый уровень, мм, не более
|
300
|
|
Характеристика
рабочей среды
|
Нефть,
нефтепродукты, сжиженные газы, вода и другие жидкости, не агрессивные к стали
12X18H10T ГОСТ 5632, вязкость которых не ограничивается при отсутствии
застывания на них, препятствующих перемещению поплавка;
|
|
Температура,
°С
|
от
минус 50 до плюс 50
|
|
Предельно
допускаемое рабочее давление МПа, не более
|
1,6
|
|
Плотность,
кг/м3
|
от
500 до 1100
|
|
Параметры
питания:
|
-
|
|
Напряжение
переменного тока, В
|
220
|
|
Частота,
Гц
|
50
или 60
|
|
Потребляемая
мощность, ВА, не более
|
9
|
|
Габаритные
размеры, мм:
|
-
|
|
ПП
|
180x160
|
|
ППР
|
160x150x88
|
|
Масса,
кг, не более:
|
-
|
|
ПП
|
10
|
|
ППР
|
2,5
|
|
Средний
срок службы, лет
|
12
|
Общий вид, габаритные и присоединительные
размера ПП и ППР датчика приведены на рисунке 3.5, 3.6.
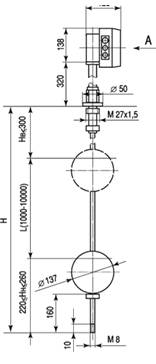
Рисунок 3.5 - Общий вид ПП
ПП состоит из следующих частей:
корпус;
погружной элемент;
преобразователь электромеханический;
поплавок с постоянными магнитами.
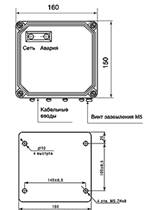
Рисунок 3.6 - Общий вид ППР
Корпус имеет съемную крышку и кабельный ввод для
подвода кабеля связи с ППР. ПП состоит из корпуса, погружной трубы и поплавка с
постоянными магнитами.
Погружной элемент может иметь жесткую или гибкую
(свыше 4 м) конструкцию. Поплавок ПП может быть изготовлен из стали 12Х18Н10Т,
титана (для сжиженных газов) или из вспененного эбонита. Минимальный диаметр
поплавка составляет 48 мм.
ПП устанавливается на емкость с измеряемой
средой с помощью резьбового штуцера с наружной резьбой М27х1,5.
Принцип действия датчика основан на измерении
времени распространения ультразвуковой волны до опорного магнита и до магнита,
расположенного в поплавке с последующим преобразованием временного интервала в
информационный сигнал. Информационный сигнал пропорционален измеряемому уровню
среды.
3.3.4 Термопреобразователь с унифицированным
токовым выходным сигналом ТСМУ 9313.
Предназначен для измерения температуры жидких,
газообразных сыпучих и веществ.
Отличительная особенность - содержит в головке
нормирующий усилитель с выходным сигналом 4-20 мА, 0-5мА, 0-5 В. Основные
параметры приведены в таблице 3.6.
Таблица 3.6 - Основные параметры
термопреобразователя ТСМУ-9313
|
Наименование
показателя
|
Значение
|
|
Показатель
тепловой инерции, с, не более
|
40
|
|
Выходной
сигнал
|
4-20
мА, 0-5мА, 0-5 В
|
|
Напряжение
питания, В
|
12-36
|
|
Потребляемая
мощность, Вт
|
0,9
|
|
Зависимость
выходного сигнала от измеряемой температуры
|
линейная
|
|
Схема
включения
|
двухпроводная
|
|
Сопротивление
нагрузки с учетом линии связи, кОм
|
1,0
|
|
Средняя
наработка до отказа при номинальных температурах, ч
|
32000
|
Термопреобразователи сопротивления ТСМУ 9313
могут быть выполнены с антикоррозийным покрытием фторопласт для измерения
температуры в кислых и щелочных средах при температуре до плюс 200°С.
Схемы включения термопреобразователей при
токовом выходном сигнале 4-20 mA показана на рисунке 3.7

Рисунок 3.7 - Схема подключения
.3.5 Расходомер вихревого типа Yokogawa
digitalYEWFLO
Расходомер вихревого типа digitalYEWFLO
обеспечивает класс точности ± 0,5% от величины объемного расхода для жидкости и
± 1% для газа, что позволяет заменять ими турбинные счетчики. Ряд номинальных
размеров варьируется в диапазоне от 15 до 400 мм. Благодаря тому, что корпус
расходомера представляет собой полностью литую конструкцию максимальное
давление для них ограничено только номиналом фланцев. На настоящий момент
максимальный номинал фланцев, который изготавливался, был ANSI2500. В
зависимости от исполнения вихревые расходомеры digitalYEWFLO могут работать при
температуре рабочей среды от минус 196 до плюс 450 0С. Расходомеры имеют также
импульсный выход, благодаря чему имеется возможность вывода на верхний уровень
одновременно сигналов по расходу и по температуре. Обеспечены цифровые
протоколы связи BRAIN, HART и Foundation FieldBus. Степень защиты корпуса
отвечает стандарту IEC IP67. Взрывонепроницаемое и искробезопасное исполнение
соответствуют типам EЕx(с)d IIC T6 _ T1 и EExia IIC T6_T1 согласно
свидетельствам о взрывозащищенности. Расходомеры серии digitalYEWFLO внесены в
Госреестр СИ с межповерочным интервалом 4 года [6].
Внешний вид прибора digitalYEWFLO фирмы Yokogawa
представлены на рисунке 3.8.

Рисунок 3.8 - Внешний вид прибора digitalYEWFLO
Тело, находящееся на пути потока, изменяет
направление движения его струй и увеличивает их скорость за счет
соответствующего уменьшения давления. За миделевым сечением тела (сечением тела
плоскостью, перпендикулярной направлению движения, взятое в том месте тела, где
площадь сечения наибольшая) начинается обратный процесс уменьшения скорости и
увеличения давления. Одновременно с этим на передней стороне тела создается
повышенное, а на задней стороне - пониженное давление. Пограничный слой,
обтекающий тело, пройдя его давления сечение, отрывается от тела и под влиянием
пониженного давления за телом изменяет направление движения, образуя вихрь. Это
происходит как в верхних, так и в нижних точках обтекаемого тела. Но так как
развитие вихря с одной стороны препятствует такому же развитию с другой
стороны, то образование вихрей с той и другой стороны происходит поочередно.
При этом за обтекаемым телом образуется вихревая дорожка Кармана шириной а,
имеющая постоянное отношение b/а, которое для обтекаемого цилиндра равно 0,281.
В расходомерах Yokogawa (серия YEWFLO), которые
предлагаются к применению на объекте, рассмотренном в технологической части,
применяется метод изгибных напряжений. Суть этого принципа заключается в том,
что формирование вихрей на теле обтекания приводит к возникновению переменного
давления, приложенного к телу обтекания, что приводит к возникновению
переменной силы, которая приводит к возникновению малых изгибных напряжений в
теле обтекания с той же самой частотой, что и частота образования вихрей. Эти
изгибные напряжения регистрируются пьезодатчиками, расположенными в теле
обтекания. Возникающая в момент срыва изгибающая сила регистрируется
расположенными внутри него пьезодатчиками.
Достоинствами такого метода измерений являются:
усреднение потока по сечению трубопровода;
исключение контакта датчиков с процессом;
возможность применения ультрастойких материалов
в качестве вихреобразователя.
Конструкция расходомеров серии DY
(digitalYEWFLO) позволяет выделять и анализировать не связанные с основным
сигналом шумы, благодаря чему эти расходомеры имеют мощные средства
дополнительной диагностики.
В схемах трубопроводов существует достаточно
большое количество источников вибрации, к которым относятся не только
двигатели, компрессоры, насосы, но и клапаны, вентили. Вихри, которые должны
четко детектировать вихревые расходомеры, по своим проявлениям очень близки к
эффектам, возникающим при вибрации трубопровода. Таким образом, получается
противоречие: вихревые расходомеры с одной стороны должны быть очень
чувствительны к воздействию вихрей (это критично при малых расходах или низких
плотностях), с другой стороны - они должны быть устойчивыми по отношению к
другим вибрациям, которые очень сложно отделить от полезного сигнала.
В вихревых расходомерах серии YEWFLO система
защиты от вибрации состоит из 2-х частей: конструктивной и аппаратной.
Вибрацию можно разложить на три пространственных
составляющих:
вдоль трубопровода;
вдоль вихреобразователя;
перпендикулярно оси трубопровода и
вихреобразователю.
Составляющие легко компенсируются за счет
сегментирования и полярности пьезодатчиков. Направление является наиболее
сложным в плане выделения и дальнейшей компенсации, так как это воздействие,
совпадающее по направленности с воздействием вихрей. На рассматриваемых
приборах компенсация основана на том, что центр приложения усилий от вихрей
образования приходится на центр сечения трубопровода, а условный центр
воздействия вибрации приходится на центр масс. Вследствие этого, эффекты от
воздействия вибрации и полезного сигнала дают разные эпюры изгиба. Путем
расположение двух пьезодатчиков по длине сенсора можно разделить полезную и
паразитную составляющие путем линейного преобразования сигнала.
Дальнейшую обработку сигналов с пьезодатчиков
можно представить следующим образом: с одной стороны сигналы с обоих
пьезодатчиков попадают в сумматор, где происходит линейное преобразование и
отсекается паразитная составляющая, с другой стороны, сигналы с каждого датчика
также анализируются по отдельности и эта информация используется в центральном
процессоре для анализа условий работы расходомера.
На приборах Yokogawa DY используются технология
Digital Signal Processing - цифровая обработка сигнала.
По этой технологии сигнал с каждого пьезодатчика
сразу же на входе оцифровывается и это с одной стороны позволяет исключить
влияние температурных характеристик элементов электроники, с другой стороны
позволяет применить всевозможные математические алгоритмы обработки сигнала
Spectral Signal Processing - спектральная обработка сигнала.
Данная технология представляет собой
усовершенствованные алгоритмы спектрального анализа, по которым анализируется
входной сигнал и проводится спектральноизбирательное усиление с учетом условий
технологического процесса. Система SSP включает в себя две подсистемы, первая
из которых - адаптивное подавление шума (adaptive noise suppression - ANS)
служит для обеспечения высокого соотношения сигнал/шум и минимизации эффектов
механических шумов. Фактически эта составляющая служит для максимально четкого
выделения полезного сигнала, что важно не только в условиях сильной вибрации,
но и при измерении малых расходов, когда амплитуда полезного сигнала очень
мала. Суть этой подсистемы заключается в том, что сигналы с пъезодатчиков
подвергаются в суммирующем усилителе линейному преобразованию, благодаря
которому шумовая составляющая сокращается. Поскольку противоположность фаз по
особенному сегментированных и соответствующим образом ориентированных
пъезодатчиков постоянны, этот механизм работает независимо от меняющихся
условий вибрации и течения среды. Вторая составляющая технологии SSP
представляет собой спектральный адаптивный фильтр (Spectral Adoptive Filter -
SAF) - аналог Фурье-преобразования. Данный аппарат применяется для
дополнительного анализа сигналов от каждого пьезодатчика и дальнейшего улучшения
определения частоты вихреобразования.
Использование этих технологий позволяет
существенно улучшить устойчивость расходомера к вибрации, а также сделало
возможным измерение гораздо меньших скоростей.
Ранее существовало два распространенных метода
определения массового и нормированного расхода сред:
прямое измерение массового расхода с
использованием принципа Кориолиса;
измерение перепада давления, абсолютного
давления и температуры при прохождении среды через сужающее устройство с
последующим вычислением массового расхода.
Первый метод достаточно удобен в плане прямых
измерений и отсутствия необходимости дополнительных вычислений, однако
кориолисовые расходомеры чрезвычайно дороги по сравнению с другими
расходомерами и достаточно капризны в плане установки с тем, чтобы обеспечивать
заявленную точность.
Второй вариант очень интересен в экономическом
плане по сравнению с первым, однако имеет целый ряд существенных недостатков и
ограничений, к которым относятся малый динамический диапазон, большое количество
соединений и сложность вычислений.
Предложенное компанией Йокогава решение на базе
вихревого расходомера digitalYEWFLO, способный выполнять многопараметрические
измерения получается выгодным сразу по многим позициям:
если учитывать полную стоимость узла измерения,
то получается самое экономичное решение;
простота установки и дальнейшего обслуживания;
высокий динамический диапазон измерений с
высокой точностью измерений;
низкое сопротивление потоку (перепад давления в
5 раз меньше, чем у диафрагмы).
.3.6 Сигнализатор СТМ-10
Сигнализаторы СТМ-10 предназначены для
непрерывного контроля довзрывоопасных концентраций горючих газов, паров и их
смесей в воздухе рабочей зоны помещений и на открытых площадках в условиях
макроклиматических районов с умеренным или тропическим влажным климатом.
Сигнализаторы с модулем преобразователя
резервного питания (МПРП) и цифровым отсчетным устройством предназначены также
для контроля содержания горючих газов и паров нефти (метана, этана, пропана,
бутана, гексана) в помещениях и открытых пространствах полупогружных буровых
установок (ПБУ) в условиях макроклиматических районов с умеренно-холодным
морским климатом.
Сигнализатор состоит из блока сигнализации и
питания и выносных датчиков или блоков датчика.
Принцип действия сигнализаторов -
термохимический - основан на измерении теплового эффекта от окисления горючих
газов и паров на каталитически активном элементе датчика, дальнейшем
преобразовании полученного сигнала в модуле МИП и выдачи сигнала о достижении
сигнальной концентрации. Сигнализаторы состоят из датчиков или блоков датчика и
блока сигнализации и питания, состоящего из МИП, МПОП и МПРП. Количество
датчиков или блоков датчика, модулей МИП, а также наличие или отсутствие МПРП
зависит от исполнения сигнализаторов [5].
В сигнализаторах с отсчетным устройством
преобразование аналогового сигнала в цифровой осуществляет устройство цифровой
индикации с аналого-цифровым преобразователем (АЦП); индикацию в % НКПР
осуществляют цифровые индикаторы: Н3 - в разряде десятков, Н2 - в разряде
единиц, Н1 - в разряде десятых долей процентов НКПР. В случае преобразования
отрицательного сигнала, обусловленного дрейфом выходного сигнала датчика,
высвечивается вторая запятая (запятая после цифры в разряде долей в индикаторе
Н1).
Режим работы - непрерывный.
Способ забора пробы - диффузионный или
принудительный, в зависимости от исполнения.
Тип сигнализаторов - стационарный,
автоматический, одно- и многоканальный.
Сигнализатор состоит из блока сигнализации и
питания и выносных
датчиков или блоков датчика.
Газовая схема блока датчика с принудительной
подачей контролируемой среды (рисунок 3.9) обеспечивает принудительную подачу
на датчик:
анализируемой среды в режимах анализа;
воздуха или поверочной смеси в режиме контроля
нуля или поверки сигнализаторов.
В режиме контроля через штуцер «ВХОД» на лицевой
стороне панели и кран трехходовой в положении «КОНТРОЛЬ» чистый воздух или
поверочная смесь точно также подается на датчик и через индикатор расхода и
эжектор на сброс.
, 4, 8, 10 - штуцер; 2 - фильтр; 3 - эжектор; 5
- вентиль запорно-регулирующий; 6 - индикатор расхода; 7 - датчик; 9 - кран
трехходовой
Рисунок 3.9 - Газовая схема блока датчика
Условия эксплуатации сигнализатора:
диапазон температуры окружающей среды:
) для датчика от минус 60 до плюс 50 °С;
) для блока датчика от 1 до 50 °С;
) для блока сигнализации и питания от 1 до 50
°С;
диапазон атмосферного давления от 84 до 106,7
кПа (от 630 до 800 мм рт. ст.);
диапазон относительной влажности воздуха от 30 до
98% при температуре 25 °С или при температуре 35 °С - для тропического
исполнения;
вибрации с частотой 25 Гц и амплитудой не более
0,1 мм;
содержание пыли не более 10 мг/м3;
напряженность внешнего однородного переменного
магнитного поля не более 400 А/м;
напряженность внешнего однородного переменного
электрического поля не более 10 кВ/м;
содержание вредных веществ в контролируемой
среде (каталитических ядов), снижающих каталитическую активность чувствительных
элементов (ЧЭ) термохимического датчика (ТХД); агрессивных веществ, разрушающих
огнепреградитель, токоподводы и ЧЭ ТХД, не должно превышать
предельно-допустимых концентраций (ПДК) согласно ГОСТ 12.1.005-88. При больших
концентрациях каталитических ядов рекомендуется применение фильтра-поглотителя.
Уровень ПДК для сероводорода Н2S не должен
превышать 10 мг/м3 за время непрерывной работы не менее 300 ч.
Сигнализатор обеспечивает:
выдачу непрерывной световой сигнализации
красного цвета по каждому каналу о достижении концентрацией порога срабатывания
предупредительной сигнализации ПОРОГ1;
выдачу прерывистой световой сигнализации
красного цвета по каждому каналу о достижении концентрацией порога срабатывания
аварийной сигнализации ПОРОГ2;
выдачу непрерывной световой сигнализации
красного цвета о наиболее вероятной неисправности сигнализаторов;
переключение контактов для коммутации внешних
цепей сигнализации при срабатывании сигнализации ПОРОГ1, ПОРОГ2;
переключение контактов для коммутации внешних
цепей сигнализации неисправности ОТКАЗ;
переключение контактов для коммутации внешних
цепей сигнализации ВКЛЮЧЕНО при включении сигнализатора (кроме сигнализаторов
исполнений, согласованных с морским регистром судоходства);
индикацию измеренной концентрации (в
сигнализаторах с отсчетным устройством или индикатором).
Пределы допускаемой основной абсолютной
погрешности сигнализатора (ΔД)
по поверочному компоненту не более ± 5,0 % НКПР.
Пределы допускаемой основной абсолютной
погрешности по поверочному компоненту не более ± 7,0 % НКПР.
Пределы допускаемой вариации выходного сигнала
сигнализаторов по поверочному компоненту не более ± 2,5 % НКПР.
Пределы допускаемой основной абсолютной
погрешности сигнализатора (ΔН)
по неповерочному компоненту, % НКПР, не более:
по гексану и нефрасу - ± 10;
по водороду - ± 5.
Пределы допускаемой основной абсолютной
погрешности срабатывания порогового устройства сигнализаторов ± 1,0% НКПР.
Пределы допускаемой дополнительной абсолютной
погрешности сигнализаторов от изменения температуры окружающей среды в рабочем
диапазоне температур на каждые 10 °С от номинального значения температуры (20 ±
5) °С не более ± 1,0% НКПР.
Пределы допускаемой дополнительной абсолютной
погрешности сигнализаторов от изменения влажности окружающей и контролируемой
среды до 98% при температуре 25 °С или 35 °С (тропическое исполнение) не более
± 4,5% НКПР.
.4 Технические характеристики контроллеров
Контроллеры Modicon TSX Quantum позволяют
создавать:
относительно простые системы с одним
контроллером и локальным вводом-выводом, в которых устройства ввода-вывода
сигналов технологических параметров размещаются в одном конструктиве с
процессором;
системы с одним контроллером и с устройствами
ввода-вывода, удаленные от процессора на расстояние до 5 километров;
системы с несколькими контроллерами,
объединенные различными сетями передачи данных, такими как Ethernet TCP/IP,
ModbusPlus, Modbus, Profibus и другими.
Разработка программ для контроллеров
(программирование контроллеров) осуществляется с помощью пакета CONCEPT.
Пакет CONCEPT содержит следующие пять языков
программирования, соответствующих международному стандарту IEC 1131:
графические языки:
а) FBD - язык функциональных блоковых диаграмм;
б) LD - язык лестничных диаграмм;
в) SFC - язык последовательных функциональных
схем;
текстовые языки:
а) IL - список инструкции (язык типа
"ассемблер");
б) ST - структурированный текст, язык, близкий к
Pascal.
Кроме того, CONCEPT содержит один не стандартный
язык LL986 типа LD.
Контроллер Modicon TSX Quantum (контроллер)
является проектно-компонуемым изделием и комплектуется из следующих компонентов
(рисунок 3.10):
шасси (рисунок 3.11);
модулей электропитания (PS);
модулей центрального процессорного устройства
(CPU или ЦПУ);
модулей ввода/вывода дискретных и аналоговых
сигналов от датчиков параметров технологического процесса;
модулей связи;
специальных модулей.
Шасси предназначены для установки модулей и
соединения их с шиной процессора. Шасси содержит внешнюю шину процессора и
места, называемые «слотами» для установки модулей.
Модули питания выполняют две функции: служат
источником питания шасси системы и защищают ее от помех и скачков напряжения.
Блоки питания имеют защиту от перегрузки по току и напряжению.
Блоки питания преобразуют поступающее напряжение
в стабилизированное постоянное напряжение +5 В для работы ЦПУ, локальных модулей
ввода-вывода и других модулей, устанавливаемых на шасси. Эти блоки не
обеспечивают запитку полевых датчиков и приводов от точек ввода-вывода.
Рисунок 3.10 - Типовая структура ПЛК ЦПУ
являются однослотовым программируемыми
устройствами со встроенной системной памятью, памятью прикладных программ и
портами связи.В ЦПУ используется технология флеш-памяти для системной памяти
ЦПУ и хранения набора команд.ЦПУ обеспечивает хранение прикладных программ в
ОЗУ с резервным батарейным питанием.
Рисунок 3.11 - Вид шасси
Все ЦПУ поддерживают сетевые протоколы Modbus и
ModbasPlus. В некоторых моделях ЦПУ используется математический сопроцессор.
Контроллеры поддерживают широкий спектр модулей
дискретного ввода-вывода, обеспечивающих взаимодействие с разнообразными
полевыми устройствами. Все модули соответствуют международным
электротехническим стандартам IEC, гарантирующим надежность в жестких условиях
эксплуатации. Все модули ввода-вывода полностью конфигурируются при помощи
программного обеспечения Concept и Modsoft.позволяет определить заранее
состояние, в которое устанавливаются дискретные выходы, если по каким-то
причинам прекращается обслуживание модулей:
отключение;
переход в заранее заданное безопасное состояние;
фиксация последнего значения.
Краткие технические характеристики модулей
приведены в таблицах 3.7 и 3.8.
Таблица 3.7 - Модули дискретного ввода
|
Обозначение
|
Входное
Напряжение
|
Наименование
|
Логика
|
|
140
DAI 340 00
|
24
В перем. Тока
|
16
изолированных входов
|
-
|
|
140
DAI353 00
|
24
В перем. Тока
|
4
группы по 8 входов
|
-
|
|
140
DAI440 00
|
48
В перем. Тока
|
16
изолированных входов
|
-
|
|
140
DAI453 00
|
48
В перем. Тока
|
4
группы по 8 входов
|
-
|
|
140
DAI 540 00
|
120
В перем. Тока
|
16
изолированных входов
|
-
|
|
140
DAI 543 00
|
120
В перем. Тока
|
2
группы по 8 входов
|
-
|
|
140
DAI 553 00
|
120
В перем. Тока
|
4
группы по 8 входов
|
-
|
|
140
DAI 740 00
|
230
В перем. Тока
|
16
изолированных входов
|
-
|
|
140
DAI 753 00
|
230
В перем. Тока
|
4
группы по 8 входов
|
-
|
|
140
DDI 153 10
|
5
В пост. Тока
|
4
группы по 8 входов
|
Источник
|
|
140
DDI 353 00
|
24
В пост. Тока
|
4
группы по 8 входов
|
Приемник
|
|
140
DDI 353 10
|
24
В пост. Тока
|
4
группы по 8 входов
|
Источник
|
|
140
DDI 364 00
|
24
В пост. Тока
|
6
групп по 18 входов
|
Приемник
|
|
140
DDI 673 00
|
125
В пост. Тока
|
3
группы по 8 входов
|
Приемник
|
|
140
DDI 841 00
|
10...60
В пост. тока
|
8
групп по 2 входа
|
Приемник
|
|
140
DDI 853 00
|
10...60
В пост. тока
|
4
группы по 8 входов
|
Приемник
|
Таблица 3.8 - Модули дискретного вывода
|
Обозначение
|
Выход
|
Наименование
|
Логика
|
|
140
DAO840 00
|
24...230
В перем. тока
|
16
изолированных выходов
|
-
|
|
140
DAO840 10
|
24...115
В перем. тока
|
16
изолированных выходов
|
-
|
|
140
DАО 842 10
|
100...230
В перем. тока
|
4
группы по 4 выхода
|
-
|
|
140
DAO 842 20
|
24...48
В перем. тока
|
4
группы по 4 выхода
|
-
|
|
140
DAO 853 20
|
24...230
В перем. тока
|
4
группы по 4 выхода
|
-
|
|
140
DDO153 10
|
5
В пост. Тока
|
4
группы по 4 выхода
|
Приемник
|
|
140
DDO 353 00
|
24
В пост. Тока
|
4
группы по 4 выхода
|
Источник
|
|
140DDO
353 10
|
24
В пост. Тока
|
4
группы по 4 выхода
|
Приемник
|
|
140
DD0 364 00
|
19...30
В пост. тока
|
6
групп по 16 выходов
|
Источник
|
|
140
DDO 885 00
|
24..125
В пост. тока
|
2
группы по 6 выходов
|
Источник
|
|
140
DDO 843 00
|
1
группа из 16 выходов
|
Источник
|
|
140
DRAS40 00
|
150
В пост. Тока
|
16
релейных выходов
|
НЗ
|
|
140
DRC 830 00
|
250
В пост. Тока
|
16
релейных выходов
|
НЗ/HP
|
|
140
DVO 853 00
|
10...30
В пост. тока
|
4
группы по 8 выходов
|
Источник
|
Опция горячего резерва обеспечивает высокую
надежность ЦПУ Quantum, которая требуется для особо ответственных систем.
Центральной позицией в системе является резервный контроллер - вторая система
Quantum, имеющая конфигурацию, идентичную основной системе управления, а также
специальные модули горячего резерва, установленные на шасси обеих систем. В
резервном контроллере используется высокоскоростная волоконно-оптическая линия
связи для постоянного контроля текущего состояния системы основного
контроллера. В случае непредвиденного отказа основного контроллера система
управления автоматически переключается на резервный. Выполнение критических
процессов в сети удаленного ввода-вывода не прерывается из-за неисправности
аппаратной части контроллера. В результате обеспечивается более высокая
производительность и сокращение простоев.
В начале каждого сканирования основного
контроллера текущий регистр и таблица состояния ввода-вывода передаются на
резервный контроллер по надежной и высокоскоростной волоконно-оптической линии
связи. При переключении на резерв резервный контроллер принимает правление
системой с обновленным состоянием входов-выводов и регистров, при этом
выполняется плавный контролируемый переход с минимальным влиянием на
технологический процесс, после переключения резервный контроллер становится
основным, а при возврате отключенного контроллера в исправное состояние он
возвращается в режим резерва.
4. ПОВЫШЕНИЕ НАДЕЖНОСТИ РЕЗЕРВУАРНОГО ПАРКА ЛПДС
«ЧЕРКАССЫ»
.1 Постановка задачи
Объектом исследования является резервуарный
парк, предназначенный для приема, хранения и перекачки светлых нефтепродуктов.
В целях обеспечения максимального уровня
безопасности емкости для нефтепродуктов оснащены системой защиты от
переполнения. Такая система включает в себя датчики контроля уровня, а также
сигнализаторами уровня, срабатывающими в момент наполнения емкости резервуара
на 90%. Эти системы просты и удобны в эксплуатации, и позволяют минимизировать
уровень пожарной опасности. Следовательно такие системы должны обеспечивать
высокий уровень надёжности.
Высокий уровень надёжности системы позволит
избегать аварийных ситуаций и повысит экономическую эффективность объёкта.
В рассматриваемом резервуарном парке стоит
уровнемер поплавковый РУПТ-А. Для увеличения надёжности предлагаю заменить этот
датчик на более современный радарный уровнемер RTG 3940 REX.
Сравним датчики и системы защиты от переполнения
по показателям надёжности.
.2 Сравнительный анализ поплавкового и радарного
датчиков
Уровнемер РУПТ-А относится к импульсным
ультразвуковым приборам с твердым звуководом, который вводится в резервуар с
контролируемой жидкостью. Длина звуковода не менее диапазона измерения. Уровень
отслеживается при помощи поплавка, перемещающегося вдоль звуковода вместе с
уровнем жидкости. В уровнемерах, измеряющих только общий уровень, поплавок
один, он отслеживает этот уровень. В уровнемерах, измеряющих одновременно общий
уровень и уровень раздела сред, два поплавка. Один отслеживает общий уровень,
второй - уровень подтоварной воды, так как имеет удельную плотность выше, чем
нефтепродукт, но ниже, чем подтоварная вода, и за счет этого находится на
границе раздела нефтепродукт - подтоварная вода. Излучатель ультразвука,
имеющий акустическую связь с верхним концом звуковода, периодически возбуждает
в нем ультразвуковые волны (УЗВ) частотой 50 кГц. Очередная УЗВ возбуждается
после того, как полностью прекратятся предыдущая и ее отражение. При каждом
цикле возбуждения УЗВ измеряются временные интервалы, пропорциональные уровню,
а при наличии опорного канала, еще и базовому (опорному) расстоянию. Момент
достижения УЗВ поплавков и опорного узла фиксируется по появлению электрических
сигналов при взаимодействии поплавка и опорного узла со звуководом в результате
прохождения УЗВ. Сигналы снимаются или со звуководов, или с намотанных на них
однослойных катушек.
Достоинства уровнемера РУПТ-А:
высокая точность и стабильность показаний (
0,15% )
независимость показаний от температурных
изменений среды и окружающего воздуха.
простота настройки при первичной установке и в
эксплуатации
отсутствие пневматических линий и
электропневмопреобразователей.
Недостатки поплавковых уровнемеров:
большая металлоемкость;
недостаточная надежность из-за наличия подвижных
элементов.
Система коммерческого учета нефтепродуктов Saab
TankRadar L/2 (TRL/2) представляет собой систему контроля и измерения уровня,
объема и массы продукта в резервуарах. Система TRL/2 может взаимодействовать с
различными датчиками, такими как датчики температуры и давления, осуществляя
полный контроль над содержимым резервуара.
Радарный уровнемер способен определить уровень в
резервуаре с погрешностью 0,5 мм, когда как поплавковый датчик уровня имеет
погрешность контрольного уровня ±8 мм. Диапазон измерений радарного уровнемера
составляет от 0,8 м до 40 м, что позволяет определять достаточно точный уровень
в резервуаре.
Ни одна часть уровнемера не находится в реальном
контакте с продуктом в резервуаре, и только антенна подвергается воздействию
атмосферы резервуара.
.3 Радарный уровнемер RTG 3940 REX
Уровнемер RTG 3940 REX используется для
установки на резервуары с плавающей крышей в направляющей трубе с любыми
продуктами, хранимыми в таких резервуарах.
Уровнемер использует режим распространения луча
радара с низкими потерями, который фактически ликвидирует влияние условий
состояния направляющей трубы. Измерения проводятся с высокой точностью, даже
если труба старая, грязная, покрытая отложениями.
Уровнемер RTG 3940 REX устанавливается на трубы
6”, 8”, 10”, и 12”. Он может устанавливаться на уже имеющиеся трубы и при его
установке нет необходимости выводить резервуар из эксплуатации.
Радарный уровнемер излучает микроволновой сигнал
по направление продукта. Он не имеет движущихся частей и контакта с жидкостью.
Радарный сигнал отражается от поверхности жидкости и возвращается на антенну.
Излучение представляет сигнал с непрерывно изменяющейся частотой. При
распространении сигнала по направление к поверхности жидкости и обратно от
поверхности жидкости к антенне он смешивается с сигналом, излучаемым в данный
момент. Т.к сигнал, отраженный от поверхности, и сигнал излучаемый к
поверхности, имеет различную частоту, то в результате наложения получается
разностный сигнал с низкой частотой. Разница в частоте между излучаемым и
отраженным сигналом пропорциональна расстоянию до поверхности жидкости [7].
Этот метод называется методом
частотно-модулированной непрерывной волны FMCW, график показан на рисунке 4.1.
Для обеспечения точности измерений радарный
уровнемер снабжен цифровым эталоном и термостабилизацией электронного блока.
Когда измерения выполняются в особо трудных условиях, программное обеспечение
уровнемера использует цифровую фильтрацию сигнала и FFT-вычисления по всей
высоте резервуара, чтобы исключить паразитные отражения и обеспечить точность
измерений.
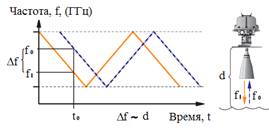
Рисунок 4.1 - Метод непрерывной волны FMCW
Для проведения измерений в трубах используется
уникальный метод специального циркулярного режима радарной волны с низкими
потерями, который практически исключает ошибки измерений, обуславливаемые
отложениями ржавчины и продукта на внутренней поверхности труб.
Радарные уровнемеры RTG работают на частоте 10
ГГц, которая оптимальная при балансировании между величиной угла излучения и
чувствительностью к конденсату. При снижении частоты увеличивается угол
излучения и, следовательно, требуемый объем свободного пространства. А при
повышении частоты увеличивается отрицательное влияние конденсата продукта и
загрязнения на антенне.
Высокая точность требует высокой
чувствительности. Чувствительность характеризует возможность измерения
расстояний с антеннами различной площади в различных условиях состояния
поверхности жидкости. В условия состояния поверхности жидкости входят: сорт
жидкости, до поверхности, рябь на поверхности. Энергия сигнала, отраженного от
гладкой поверхности, пропорциональна диэлектрической постоянной жидкости.
Радарные уровнемеры SAAB могут измерять уровень всех жидкостей в любых условиях
(рисунок 4.2).
- волновод; 2 - волновое соединение; 3 -
защитный кожух; 4 - основной блок; 5 - стояк; 6 - конус; 7 - уплотнение
Рисунок 4.2 - Общий вид уровнемера RTG 3940 REX
.4 Надежностное обоснование замены поплавкового
уровнемера на
радарный
уровнемер
.4.1 Основные показатели надёжности.
Надежность датчиков является одним из основных
показателей качества. Датчики относятся к невосстанавливаемым устройствам,
поэтому их надежность характеризуют вероятностью невыхода из строя за время
хранения и выполнения задания. Требования к надежности датчиков довольно высоки
- 0,99 - 0,9999.
Основные характеристики надежности для
невосстанавливаемых изделий:
вероятность безотказной работы за время t P(t);
вероятность отказа за время t Q(t);
интенсивность отказов λ(t),
которая
указывает среднее число отказов, возникающее за единицу времени эксплуатации
изделия;
среднее время наработки изделия до отказа Т.
Так как все расчеты выполняются для нормальной
эксплуатации приборов, то вероятность безотказной работы за время t выглядит
так:
 . (4.1)
. (4.1)
Для невосстанавливаемого изделия,
которое работает до отказа, надежность характеризуют средним временем наработки
до отказа Т [8].
Рассмотрим методику расчета
надежности невосстанавливаемых изделий. Условия расчета надежности:
расчет производится для этапа
нормальной эксплуатации изделия, поэтому считают λ(t) = const;
создают надежностную схему изделия,
причем считают, что отказ элемента (группы элементов), включенных в
надежностную схему, приводит к отказу всего изделия;
каждый элемент, включаемый в
надежностную схему, характеризуется интенсивностью отказов λi и
вероятностью безотказной работы Pi(t);
считают, что отказы отдельных
элементов независимы между собой (хотя бы в первом приближении), поэтому
вероятность безотказной работы изделия Ризд(t) (по теории вероятностей)
находится по формуле:
 , (4.2)
, (4.2)
Интенсивность отказов изделия λизд будет
равна:
 , (4.3)
, (4.3)
Среднее время наработки на отказ
найдется как:
 . (4.4)
. (4.4)
.2.2 Расчёт показателей надёжности
поплавкового уровнемера РУПТ-А.
Уровнемер РУПТ-А состоит из
следующих элементов:
корпус;
погружной элемент;
преобразователь электромеханический
(в дальнейшем - ПЭ);
поплавок с постоянными магнитами.
Составляется надежностная схема,
представленная на рисунке 4.3.
λ1 - погружной элемент; λ2 -
преобразователь электромеханический; λ3 - поплавок с постоянными
магнитами
Рисунок 4.3 - Надежностная схема
уровнемера РУПТ-А
Интенсивность отказа элементов
уровнемера РУПТ-А:
λ1 = 11·10-6 1/ч,
λ2 = 10·10-6 1/ч,
λ3 = 18,5·10-6 1/ч.
Согласно формуле (4.3) интенсивность
отказов датчика находится по формуле:
 . (4.5)
. (4.5)
Подставив значения интенсивности
отказов в формулу компонентов, получаем:
 1/ч. (4.6)
1/ч. (4.6)
Так как мы рассчитываем вероятность
безотказной работы P(t) датчика при нормальной эксплуатации при λ (t) =
const, то
вероятность P(t) будет меняться по экспоненциальному закону. Для
рассматриваемого поплавкового уровнемера вероятность безотказной работы
рассчитывается по формуле (4.1):
 .
.
График зависимости вероятности
безотказной работы уровнемера РУПТ-А представлена на рисунке 4.4.
Рисунок 4.4 - Зависимость P(t)
уровнемера РУПТ-А
Для итоговой оценки среднего времени
наработки до отказа уровнемера РУПТ-А на основе вычисленных интенсивностей
отказов компонентов датчика воспользуемся формулой (4.2):
.4.3 Расчёт показателей надёжности
радарного уровнемера RTG 3940 REX
Радарный уровнемер RTG 3940 REX
состоит следующих элементов - антенны, волновода, волноводного соединения,
основного блока.
Таким образом, надежностная схема
радарного уровнемера будет выглядеть как показано на рисунке 4.5:

λ1 - антенна; λ2 - волновод; λ3 - волноводное
соединение; λ4
- основной
блок
Рисунок 4.5 - Надежностная схема RTG
3940 REX
Интенсивность отказа элементов
радарного уровнемера RTG 3940 REX:
λ1 = 7,5·10-6 1/ч,
λ2 =5,4 ·10-6 1/ч,
λ3 = 4,8·10-6 1/ч,
λ4 =7,3·10-6 1/ч.
Согласно формуле (4.3) интенсивность
отказов датчика находится по формуле:
 . (4.7)
. (4.7)
Подставив значения интенсивности
отказов в формулу (4.6) компонентов, получаем:
 1/ч.
1/ч.
Так как мы рассчитываем вероятность
безотказной работы P(t) датчика при нормальной эксплуатации при λ (t) =
const, то
вероятность P(t) будет меняться по экспоненциальному закону. Для
рассматриваемого радарного уровнемера вероятность безотказной работы
рассчитывается по формуле (4.1):
 .
.
График зависимости вероятности
безотказной работы радарного уровнемера представлен на рисунке 4.6.
Рисунок 4.6 - Зависимость P(t)
радарного уровнемера RTG 3940 REX
Анализ результатов расчетов.
Сравнительная зависимость
вероятностей безотказной работы P(t) для поплавкового уровнемера РУПТ-А и
радарного уровнемера RTG 3940 REX представлена на рисунке 4.7.
Рисунок 4.7 - Сравнительная
характеристика двух уровнемеров
На рисунке 4.7 видно, что надежность
радарного уровнемера RTG 3940 REX значительно выше надежности поплавкового
уровнемера РУПТ-А.
.5 Расчет показателей надежности для
системы защиты от переполнения
Систему защиты от переполнения можно
разделить на подсистемы:
подсистема контроля уровня
в резервуаре;
подсистема сигнализации
предельных уровней в резервуаре;
подсистема управления
задвижками при заполнении и опорожнении резервуара.
Все подсистемы выполняют свои
определённые функции обеспечивающие защиту от переполнения резервуара.
Подсистемы состоят из элементов. Вычислим параметры надёжности системы защиты
от переполнения с уровнемером РУПТ-А и с радарным уровнемером RTG 3940 REX.
Состав элементов и параметры их
надёжности приведены в таблице 4.1.
Таблица 4.1 - Состав элементов и
параметры их надёжности
|
Тип
прибора
|
Сокращение
|
Интенсивность
отказов λ·10-6,
час-1
|
|
Модуль
питания
|
МП
|
2,78
|
|
Модуль
центрального процессора
|
МЦП
|
9,50
|
|
Модули
ввода/вывода
|
МВВ
|
20,00
|
|
Модуль
связи
|
МС
|
30,00
|
|
Уровнемер
РУПТ-А
|
РУПТ
|
39,50
|
|
Датчик
радарный
|
RTG
|
25,00
|
|
Сигнализатор
уровня ПМП-022
|
ПМП
|
30,00
|
|
Горн
|
Г
|
40,00
|
|
Световое
табло
|
СТ
|
1,01
|
|
Задвижка
|
Зд
|
37,50
|
Структурная схема надежности любой из подсистем
представляет собой либо последовательные, либо параллельное соединение звеньев
или элементов.
Функции подсистем представлены в таблице 4.2.
Таблица 4.2 - Функции подсистем
|
№
функции
|
Название
функции
|
|
F1
|
Функция
контроля уровня в резервуаре
|
|
F2
|
Функция
управления задвижками при заполнении и опорожнении резервуара (открытия или закрытия)
|
|
F3
|
Функция
контроля предельных уровней сигнализатором
|
|
F4
|
Функция
подачи сигнала от сигнализатора уровня на световое табло
|
|
F5
|
Функция
подачи сигнала от сигнализатора уровня в горн
|
Расчёт надежностных показателей функции контроля
уровня в резервуаре уровнемером РУПТ-А (F1). Структурная схема для расчета
надежностных характеристик функции F1 показана на рисунке 4.8.
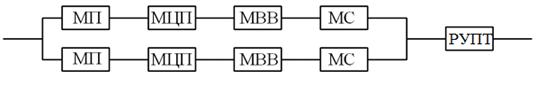
Рисунок 4.8 - Структурная схема для расчета
надежностных характеристик функции F1
Интенсивность отказов для контроллера равна:
 =0,00000278+0,0000095+0,00002+
=0,00000278+0,0000095+0,00002+
,00003= 0,00006228 1/ч.
Вероятность безотказной работы при
t=10000 для основного контроллера будет равна:

 0,537.
0,537.
Вероятность отказа за время t=10000
для основного контроллера будет равна:
 0,462.
0,462.
Общая вероятность безотказной работы
резервного и основного контроллера будет:
 =1-(1-
=1-(1- )2=0,786.
)2=0,786.
Отсюда находим общую интенсивность
отказов для основного и резервного контроллеров:
 10000,
10000,
 24·10-6 1/ч.
24·10-6 1/ч.
Интенсивность отказов для функции
контроля уровня уровнемером РУПТ-А:
 ·10-6 1/ч.
·10-6 1/ч.
Время наработки на отказ функции
контроля уровня уровнемером РУПТ-А:
 15748
15748  ч.
ч.
Вероятность безотказной работы за
10000 часов F1 для функции управления задвижками равна:

 =0,53.
=0,53.
Расчёт надежностных показателей
функции контроля уровня в резервуаре радарным датчиком RTG 3940 REX (F1).
Структурная схема для расчета надежностных характеристик функции F1 показана на
рисунке 4.9.

Рисунок 4.9 - Структурная схема для
расчета надежностных характеристик функции F1
Интенсивность отказов для функции
контроля уровня радарным датчиком RTG 3940 REX равна:
 49·10-6 1/ч.
49·10-6 1/ч.
Время наработки на отказ функции
контроля уровня радарным датчиком RTG 3940 REX равна:
20408 ч.
Вероятность безотказной работы за
10000 часов F1 для функции управления задвижками равна:
0,613.
Расчёт надежностных показателей
функции управления задвижками (F2). Структурная схема для расчета надежностных
характеристик функции F2 показана на рисунке 4.10.

Рисунок 4.10 - Структурная схема для
расчета надежностных характеристик функции F2
Интенсивность отказов для функции
управления задвижками равна:
 61,5·10-6 1/ч.
61,5·10-6 1/ч.
Время наработки на отказ функции F2
равно:
 16260 ч.
16260 ч.
Вероятность безотказной работы за
10000 часов F2 для функции управления задвижками равна:
 0,54.
0,54.
Расчёт надежностных показателей
функции контроля предельных уровней сигнализатором ПМП-022 (F3). Структурная
схема для расчета надежностных характеристик функции F3 показана на рисунке
4.11.
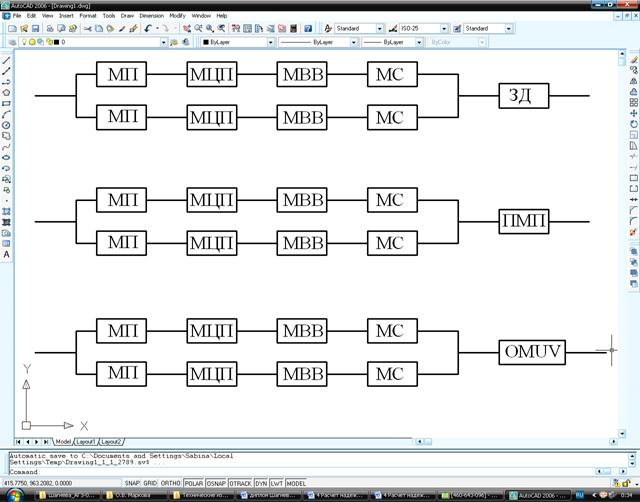
Рисунок 4.11 - Структурная схема для
расчета надежностных характеристик функции F3
Интенсивность отказов для функции
контроля предельных уровней сигнализатором равна:
 54·10-6 1/ч.
54·10-6 1/ч.
Время наработки на отказ функции F3
равно:
 18518 ч.
18518 ч.
Вероятность безотказной работы за
10000 часов F3 для функции контроля предельных уровней сигнализатором равна:
 0.58
0.58
Расчёт надежностных показателей
функции подачи сигнала от сигнализатора уровня на световое табло (F4).
Структурная схема для расчета надежностных характеристик функции F4 показана на
рисунке 4.12.

Рисунок 4.12 - Структурная схема для
расчета надежностных характеристик функции F4
Интенсивность отказов для функции
подачи сигнала от сигнализатора уровня на световое табло равна:
 25,01·10-6 1/ч.
25,01·10-6 1/ч.
Время наработки на отказ функции F3
равно:
 40000 ч.
40000 ч.
Вероятность безотказной работы за
10000 часов F4 для функции подачи сигнала от сигнализатора уровня на световое
табло равна:
 0.778.
0.778.
Расчёт надежностных показателей
функции подачи сигнала от сигнализатора уровня в горн (F5). Структурная схема
для расчета надежностных характеристик функции F5 показана на рисунке 4.13.

Рисунок 4.13 - Структурная схема для
расчета надежностных характеристик функции F4
Интенсивность отказов для функции
подачи сигнала от сигнализатора уровня в горн равна:
 64·10-6 1/ч.
64·10-6 1/ч.
Время наработки на отказ функции F3
равно:
 15625 ч.
15625 ч.
Вероятность безотказной работы за
10000 часов F5 для функции управления задвижками равна:
 0.527.
0.527.
Результаты расчетов надежности
подсистем уровнемером РУПТ-А и радарным уровнемером RTG 3940 REX приведены в
таблицах 5.1 и 5.2
Таблица 4.3 - Результаты расчётов
надёжности подсистем уровнемером РУПТ-А.
|
№
Функции
|
Интенсивность
отказа, 10-6 час-1
|
Вероятность
безотказной работы
|
Время
наработки изделия до отказа, ч
|
|
F1
|
63,5
|
0,53
|
15748
|
|
F2
|
61,5
|
0,54
|
16260
|
|
F3
|
54
|
0,58
|
18518
|
|
F4
|
25,01
|
0,778
|
40000
|
|
F5
|
64
|
0,527
|
15625
|
|
∑
|
268,01
|
0,685
|
-
|
Таблица 4.4 - Результаты расчётов надёжности
подсистем с радарным уровнемером RTG 3940 REX
|
№
Функции
|
Интенсивность
отказа, 10-6 час-1
|
Вероятность
безотказной работы
|
Время
наработки изделия до отказа, ч
|
|
F1
|
49
|
0,613
|
20408
|
|
F2
|
61,5
|
0,54
|
16260
|
|
F3
|
54
|
0,58
|
18518
|
|
F4
|
25,01
|
0,778
|
40000
|
|
F5
|
64
|
0,527
|
15625
|
|
∑
|
253,51
|
0,79
|
-
|
По результатам расчетов можно сделать вывод, что
радарный уровнемер RTG 3940 REX значительно превосходит по надежностным
характеристикам уровнемер РУПТ-А.
Рисунок 4.14 - Сравнительная характеристика
системы защиты от переполнения с разными датчиками уровня
Надежность повышается из-за отсутствия в
радарных уровнемерах контакта с продуктами резервуара. Поэтому для радарных
уровнемеров безопасны химически агрессивные вещества и соединения (хлор, сера,
фосфор, фтор, аммиак, окислы азота, тетраэтилсвинец и т. д.), выводящие из строя
уровнемеры. Следовательно, увеличится срок службы. Радарный уровнемер нуждается
в меньшем обслуживании, чем поплавковый. Установка такого уровнемера повысит
надёжность системы измерений количества продуктов ЛПДС «Черкассы», что даст
возможность избегать аварийных ситуаций.
5. ОХРАНА ТРУДА И ТЕХНИКА БЕЗОПАСНОСТИ
В данном дипломном проекте, как отмечалось
ранее, рассматриваются средства автоматизации резервуарного парка ЛПДС
«Черкассы» Резервуарный парк относится к опасным производственным объектам.
С целью обеспечения безопасности производства
при монтаже и эксплуатации средств автоматизации, описанных в технической части
дипломного проекта, в данном разделе необходимо дать характеристику
производственной среды, в которой производится автоматизация, сделать анализ
производственных опасностей и вредностей.
Опасность резервуарного парка резко возрастает
при аварийных утечках без признаков разрушения и повреждения, при частичном
повреждении резервуара. Безопасность производства и экологическая безопасность
на данном объекте должны соблюдаться при всех видах работ, связанных с
монтажом, обслуживанием и наладкой средств автоматизации. Несоблюдение
требований безопасности производства на данном объекте может привести к
производственным травмам, отравлениям, а экологической безопасности - к
загрязнению окружающей среды. При соблюдении техники безопасности во время всех
видов работ исключается возможность возникновения аварийных ситуаций, взрывов,
пожаров и получения производственных травм.
.1 Характеристика производственной среды и
анализ потенциальных опасностей на производстве
При автоматизации резервуарного парка наибольшую
опасность представляют возможности взрыва, пожара и отравления, так как
резервуары нефти и нефтепродуктов - это концентрация в одном месте больших
количеств горючих и взрывоопасных веществ.
Пожароопасность и взрывоопасность на
резервуарных парках в значительной степени определяется физико-химическими
свойствами перекачиваемых нефтепродуктов. Некоторые из этих показателей
приведены в таблицах 5.1, классификация помещений по взрывоопасности приведена
в таблице 5.2
Таблица 5.1 - Пожароопасные свойства бензинов и
дизельных топлив
|
Марка
нефте-продукта
|
Температура,
ºС
|
Температурные
пределы распространения пламени, ºС
|
Концентрационные
пределы распространения пламени, % об.
|
ПДК,мг/м3
|
Класс
опасности
|
|
вспы-шки
|
само-воспла-менения
|
ниж-ний
|
верх-ний
|
ниж-ний
|
верх-ний
|
|
|
|
Бензины
|
-27
|
200
|
-27
|
-7
|
0,76
|
5,16
|
100
|
4
|
|
Дизель-ное
топливо
|
48
|
225
|
43
|
92
|
1,16
|
4,5
|
300
|
4
|
Таблица 5.2 - Классификация помещений по взрывоопасности
|
Наименование
производственных зданий, помещений, наружных установок
|
Категория
Взрывопожароопасной и пожарной опасности зданий и помещений (НПБ 105-03)
|
Классификация
зон внутри и вне помещений
|
категория
и группа взрывопожаро- опасных смесей (ГОСТ 12.1.011-078) РД1330.5-99,
РД1330.11-99
|
|
Зал
насосной ЛПДС
|
А
|
В-1а
|
II-АТЗ
|
|
Операторная
|
Д
|
-
|
-
|
При монтаже, наладке эксплуатации и ремонте
систем автоматизации, установленных на резервуарах, дренажных ёмкостях, а также
вторичных приборов в операторной, лаборатории и на территории резервуарного
парка производственные опасности и вредности могут быть обусловлены следующими
факторами:
наличие в воздухе вредных для организма
человека паров
нефтепродуктов, газов, а также опасность образования взрывоопасных
концентраций (см. таблицу 5.1);
поражение электрическим током, в связи с тем,
что питание вторичных приборов осуществляется напряжением 220 вольт;
воздействие атмосферного электричества (удар
молнии) и проявление статического электричества на резервуарный парк в летний
период;
опасности, связанные с наличием
давления в резервуарах возникают при нарушении «Правил устройства и безопасной
эксплуатации сосудов, работающих под давлением» ПБ 03-576-03);
производственные травмы, причиной
которых может быть
недостаточное освещение рабочего места. Освещение, несоответствующее
условиям работы, вызывает повышенную утомленность, замедленную
реакцию, приводит к ухудшению зрения и может явиться существенной
причиной травматизма;
во время монтажа, ремонта средств
автоматизации на резервуарах и дренажных емкостях датчиков может возникнуть
опасность падения с высоты (более 12 м.), а также возможность получения
механических травм у персонала обслуживающего средства автоматики;
- поражение электрическим током, в
связи с тем, что питание вторичных приборов осуществляется напряжением 220
вольт;
отравление персонала парами нефти из-за
неисправности
дыхательного клапана резервуара, при монтаже или осмотре средств
автоматизации, установленных на резервуаре или близ него;
переохлаждение организма в зимнее время
года и тепловой удар летом в связи с проведением ремонтных работ на открытом
воздухе;
пожар в результате применения открытого
огня.
Помещение операторной, где установлены вторичные
приборы согласно НПБ 105-2003, относится к категории Д, а зал насосной - к
категории А (см. таблицу 5.2).
.2 Мероприятия по обеспечению безопасных и
безвредных условий труда
.2.1 Мероприятия по технике безопасности при
эксплуатации объектов ЛПДС «Черкассы»
Во избежание несчастных случаев при обслуживании
объектов ЛПДС, направляемый на работу, персонал должен иметь соответствующую
подготовку, пройти производственный инструктаж, ознакомиться с правилами
внутреннего распорядка, общими правилами техники безопасности и с безопасными
методами работы при обслуживании объектов ЛПДС, а также с методами оказания
первой помощи. По окончании инструктажа направляемые на работу сдают экзамен по
технике безопасности в соответствии со СО 02-04-АКТНП-007-2006 и получают
удостоверение с присвоенной квалификационной группы. Инструктажи допуска
персонала к самостоятельной работе соответствуют требованиям ГОСТ 12.0.004-90
(1999) «ССБТ. Организация обучения безопасности труда. Общие положения».
Безопасные и безвредные условия труда, при
проведении работ, связанных с обслуживанием АСУ ТП, достигаются следующим:
заземление оборудования, емкостей, коммуникаций,
в которых возникают заряды статического электричества (R3<100 Ом).
Необходимая защита от поражения электрическим током обеспечивается защитным
заземлением корпусов всех приборов и оборудования. Электрическая изоляция между
отдельными электрическими цепями и корпусом должна выдерживать в течение минуты
действие испытательного повышенного напряжения 1000 В промышленной частоты.
Электрическая изоляция между отдельными электрическими цепями, и между этими
цепями и корпусом должна быть не менее 0,5 МОм.
по способу защиты человека от поражения
электрическим током
изделия АСУ ТП соответствуют классам 1 и 2 (для изделий, предназначенных для
соединения с источником напряжения 220 В) и классу 3 (для изделий,
предназначенных для соединения с источником напряжения 24 В) по ГОСТ
12.2.007.0-75* (2001) «ССБТ. Изделия электротехнические. Общие требования
безопасности»;
электрическое сопротивление между элементами
защитного заземления и корпусом коммутационного панельного каркаса не более 0,1
Ом. Корпуса устройств заземляются в соответствии с 12.2.007.0-75 (2001),
сопротивление контура заземления не более 4 Ом. Измерение сопротивления
заземляющего устройства производится не реже одного раза в год;
все токоведущие части, находящиеся под
напряжением, превышающим U=42 В по отношению к корпусу, имеют защиту от
случайных прикосновений во время работы;
подключение внешних цепей, разъемов,
проведение ремонтных работ должны осуществляться только при отключенных
напряжениях питания;
подключение источников сетевого питания
должно осуществляться через автоматические выключатели;
защита технологических трубопроводов от
атмосферного электричества и вторичных проявлений молний в соответствии с
«Инструкцией по устройству молниезащиты зданий и сооружений и промышленных
коммуникаций» (СО 153-34.21.122-03);
автоматическая аварийная защита
технологического оборудования,
позволяющая исключить возможность работы его в аварийных условиях;
оснащенность наглядными плакатами,
четкими надписями, табличками, запорная арматура пронумерована;
насосы снабжены предохранительными
клапанами, которые не допускают повышения давления выше регламентируемого;
конструкцией приборов: все части устройств,
находящихся под напряжением размещены в корпусах, обеспечивающих защиту
обслуживающего персонала от прикосновения к деталям, находящимся под
напряжением;
надежным креплением оборудования при монтаже на
объекте автоматизации;
подключение разъемов, замена плавких вставок,
предохранителей производится только при отключенных напряжениях питания
устройств. Подключение напряжения питания осуществляется через автоматы защиты.
Таким образом, на ЛПДС осуществляется комплекс
организационных и технических мероприятий, обеспечивающих надёжность,
эффективность, безопасность работы объектов с необходимой степенью защиты
персонала и окружающей среды.
.2.2 Мероприятия по промышленной санитарии
К ним относятся требования к спецодежде, требования
к освещению, микроклимату, требования к организации и оборудованию рабочего
места, которые нормируются ГОСТ 12.4.103-83(2002) «ССБТ. Одежда специальная
защитная, средства индивидуальной защиты ног и рук. Классификация»
Требования к спецодежде:
спецодежда и спецобувь выдаются
операторам, технологам, слесарям КИП и А, слесарям-ремонтникам,
слесарям-монтажникам в пределах установленных норм;
во время работы рабочие обязаны
пользоваться выданной им
спецодеждой и спецобувью.
Так же стоит заметить, что персонал объекта
должен быть оснащен противогазами.
Противогазы применяют при объемной доле
свободного кислорода в воздухе не менее 18 процентов и суммарной объемной доле
паро- и газообразных вредных примесей не более 0,5 %. Средством индивидуальной
защиты служит противогаз с коробкой марки ДОТ 600 А2В3Е3Р3. Индивидуальные
фильтрующие противогазы должны храниться в специальных шкафах каждый в
отдельной ячейке с надписью фамилии рабочего. Передача противогаза другому лицу
запрещается. Ремонтные рабочие (при выполнении работ по ремонту и очистке
различных емкостей, а также при ремонтных работах в колодцах, подвальных
помещениях и пр.) обязаны иметь шланговые противогазы типа ПШ-1М по ТУ
2568-194-05808014-99.
Шланговые противогазы предназначены для защиты
органов дыхания и глаз человека при работе в атмосфере с объемной долей вредных
веществ более 0,5 % объема и объемной долей кислорода в воздухе менее 18
процентов объема.
Противогазы ПШ-1М хранятся вместе с
инструментом, предназначенным для устранения аварии в опломбированном ящике в
операторной.
На рабочих местах ЛПДС предусмотрено рабочее и
аварийное освещение. Напряжение сети рабочего и аварийного освещения составляет
220 В. Для аварийного и рабочего освещения предусмотрены светильники ВЗГ-200
(взрывозащищенное исполнение) ГОСТ 12.2.007.13-2000(2001) «ССБТ. Лампы
электрические. Требования безопасности» с освещенностью равной 50 лк, в
соответствии со СНИП 23-05-95*(2003) «Естественное и искусственное освещение».
Температуре воздуха в помещении насосной станции
должна быть от 5 до 35 °С, относительная влажность воздуха - не более 80% при
25 °С.
5.3 Мероприятия по пожарной безопасности
Мероприятия по пожарной безопасности при
автоматизации ЛПДС разработаны в соответствии с нормативным документом
ППБ-01-03.
«Прaвила пожарной безопасности в РФ» и в
соответствии с ГОСТ 12.1.004-91 (1999 года) «ССБТ. Пожарная безопасность. Общие
требования».
Дaтчики, входящие в систему измерения
параметров, имеют взрывозащищенное исполнение, соответствуют требованиям ГОСТ Р
51330.1-99 и ГОСТ Р 51330.10-99.
Перед началом работы ёмкостей, насосов система
автоматизации должна быть в исправном состоянии, а в случае необходимости
отремонтирована. При неисправности системы автоматизации эксплуатация объектов
запрещается. Основные мероприятия по пожарной безопасности:
территория нефтеперекачивающей станции должна
содержаться в чистоте и порядке. Не допускается замазученность территории:
загрязнение горючим мусором и хламом, загромождение дорог, проездов к зданиям,
сооружениям и средствам пожаротушения, а также противопожарных разрывов;
при производстве работ в газовой среде
воспрещается применение ударных инструментов, изготовленных из стали: ударные
инструменты должны быть изготовлены из цветного металла (меди, латуни, бронзы).
Режущие инструменты должны обильно смазываться маслом, тавотом или мыльным
раствором;
на объектах должен быть организован контроль
воздушной среды газоанализаторами, предназначенными для контроля
многокомпонентных смесей;
отогрев замерших нефтепроводов допускается только
паром или горячей водой или горячим песком при закрытой запорной арматуре;
категорически запрещается применение для
освещения насосных, резервуаров и других производственных сооружений факелов,
спичек, свечей, керосиновых фонарей и других источников открытого огня;
необходимо постоянно следить за исправностью
силовой и осветительной электропроводки. Различные неисправности электросетей,
которые могут вызвать пожар, должны быть устранены;
обслуживающий персонал обязан знать
устройство и инструкции по применению первичных средств пожаротушения;
для тушения электропроводки и
электрооборудования разрешается использовать только углекислотные огнетушители
ОПУ-5;
предусматривается молниезащита взрывоопасных
зданий и сооружений согласно «Инструкции по устройству молниезащиты зданий и
сооружений» СО 153-34.21.122-03. Молниезащита нефтеперекачивающей станции
предназначена для безопасности людей, сохранности зданий, сооружений от удара
молнии.
В комплекс грозозащитных устройств входят
молниеприемники, токоотводы и заземление.
Пожарную защиту объектов ЛПДС обеспечивает
автоматическая система пенотушения, которая включает в себя средства
обнаружения пожара, системы сигнализации, управления, пожаротушения.
Срабатывание системы пенотушения происходит: автоматически, дистанционно или
вручную.
При возникновении пожара сигнал от пожарных
датчиков, приводит в действие систему пожаротушения согласно ГОСТ
12.3.046-91(2001) «ССБТ. Установки пожаротушения автоматические. Общие
технические требования».
Охлаждение технологических установок
осуществляется из стационарных комбинированных лафетных стволов и от пожарных
гидрантов, установленных на сети противопожарного водопровода с использованием
передвижной пожарной техники [9].
.4 Расчет молниезащиты резервуара РВС-5000
Согласно СО 153-34.21.122-2003, резервуарный
парк относится к II уровню защиты с надежностью защиты от прямого удара молнии
0,95.
Защита от прямых ударов молнии должна
производится отдельно стоящими или установленными на крыше резервуара
молниеотводами. В зону защиты молниеотводов должно входить пространство над
каждой единицей дыхательной аппаратуры.
При возникновении пожара сигнал от пожарных
датчиков, приводит в действие систему пожаротушения согласно ГОСТ
12.3.046-91(2001) «ССБТ. Установки пожаротушения автоматические. Общие
технические требования».
Зона защиты стержневого молниеотвода высотой h
< 150 м представляет собой круговой конус, вершина которого находится на
высоте ho < h. Размеры внутренних областей определяются параметрами ho и hc,
первый из которых задает максимальную высоту зоны непосредственно у
молниеотводов и составляет 0,85h (согласно СО 153-34.21.122-2003), а второй -
минимальную высоту зоны посередине между молниеотводами.
Схема зоны защиты двойного стержневого
молниеотвода показана на рисунке 5.1.
Для расстояний между молниеотводами L > Lmax
высота hc определяется по выражению:
 (5.1)
(5.1)
Рисунок 5.1 - Схема зоны защиты
двойного стержневого молниеотвода резервуара РВС-5000
Входящие в него предельные
расстояния Lmax и Lc вычисляются но эмпирическим формулам и составляют 5,75h и
l,2h соответственно (согласно СО 153-34.21.122-2003). Подставим данные значения
в выражение 5.1 и выразим р:
h=(hc+0,19×L)/1,06, (5.2)
где h - высота молниеотводов от
земли, м;- высота зоны защиты молниеотводов, м;- расстояние между
молниеотводами, м.
Произведем расчет высоты
молниеотводов для резервуара РВС-5000 высотой равной 11,7 м и диаметром - 22,8
м. Из формулы 5.2 имеем, что высота молниеотводов при известных значениях hc
=13 м и L=22,8 м составляет:
=(13+0,19×22,8)/1,06=16,3 м. (5.3)
Так как молниеотводы будут
располагаться на крыше резервуара, то их высота будет рассчитываться по формуле:
hм = h - hр, (5.4)
где hм - высота молниеотвода, м;
- высота резервуара, м.
Таким образом, для молниезащиты
резервуара РВС-5000 необходимо четыре молниеотвода, высотой 4,6 м.
6. ОЦЕНКА ЭКОНОМИЧЕСКОЙ
ЭФФЕКТИВНОСТИ ВНЕДРЕНИЯ РАДАРНОГО УРОВНЕМЕРА
.1 Методика расчета экономической
эффективности инвестиций
Инвестиции - средства (денежные
средства, ценные бумаги, иное имущество, в том числе и имущественные права,
имеющие денежную оценку), вкладываемые в объекты предпринимательской и (или) иной
деятельности с целью получения прибыли и (или) достижения иного полезного
эффекта.
Различаются:
капиталообразующие инвестиции,
обеспечивающие создание и воспроизводство фондов; состоят из капитальных
вложений, оборотного капитала, а также, иных средств, необходимых для проекта;
портфельные инвестиции - помещение
средств в финансовые активы.
Капитальные вложения - инвестиции в
основной капитал (основные средства), в том числе затраты на новое
строительство, расширение, реконструкцию и техническое перевооружение
действующих предприятий, приобретение машин, оборудования, инструмента,
инвентаря, проектно-изыскательные работы и другие затраты.
Анализ эффективности инвестиционного
проекта основывается на моделировании денежных потоков, складывающихся в течении
всего срока жизни проекта.
Проект - комплекс действий (работ,
услуг, приобретений, управленческих операций и решений), направленных на
достижение сформулированной цели.
Инвестиционный проект - обоснование
экономической целесообразности, объема и сроков осуществления капитальных
вложений, в том числе необходимая проектно-сметная документация. Эффективность
инвестиционного проекта характеризуется системой показателей, отражающих
соотношение затрат и результатов применительно к интересам его участников.
Необходимо различать понятия:
экономическая эффективность и экономический эффект. Под экономическим эффектом
в общем случае понимается величина экономии затрат в рублях в результате
осуществления какого-либо мероприятия или их совокупности. В традиционных технико-экономических
расчетах чаще всего используется величина годового экономического эффекта, т.е.
экономии средств за год. Под экономической эффективностью понимается
относительная величина, получаемая в результате сопоставления экономического
эффекта с затратами, вызвавшими этот эффект. Причем это может быть простое
отношение эффекта к соответствующим затратам и более сложные отношения.
Денежный поток (поток реальных
денег) складывается из всех притоков и оттоков денежных средств в некоторый
момент времени (или на некотором шаге расчета).
Приток денежных средств равен
величине денежных поступлений (результатов в стоимостном выражении) на
соответствующем шаге. Отток равен платежам (затратам) на этом шаге.
Срок жизни проекта (расчетный
период) должен охватывать весь жизненный цикл разработки и реализации проекта
вплоть до его прекращения. Срок жизни проекта включает в себя следующие
основные стадии (этапы): инвестиционную, эксплуатационную, ликвидационную.
Для оценки эффективности
инвестиционных проектов применяется метод дисконтированной оценки, который
базируется на учете временного фактора. Данный метод учитывает временной фактор
с позиции стоимости денег в будущем. Данный метод учитывает временной фактор с
позиции стоимости денег в будущем. В соответствии с методическими
рекомендациями оценка эффективности инвестиционных проектов предусматривает
расчет следующих показателей:
чистый дисконтированный доход (ЧДД);
индекс доходности инвестиций (ИД);
внутренняя норма доходности (ВНД);
срок окупаемости инвестиций (СО).
Расчетный период разбивается на
шаги, в пределах которых производится агрегирование данных, используемых для
оценки финансовых показателей. Шаги расчета определяются их номерами (0, 1, …).
Время в расчетном периоде измеряется в годах или долях года и отсчитывается от
фиксированного момента, принимаемого за базовый (обычно в качестве базового
принимается момент начала или конца нулевого шага).
Норма дисконта (приведения) отражает
возможную стоимость капитала, соответствующую возможной прибыли инвестора,
которую он мог бы получить на ту же сумму капитала, вкладывая его в другом
месте, при допущении, что финансовые риски одинаковы для обоих вариантов
инвестирования. Другими словами, норма дисконта должна являться минимальной
нормой прибыли, ниже которой предприниматель счел бы инвестиции невыгодными для
себя.
Если рассчитанный ЧДД положителен,
то прибыльность инвестиций выше нормы дисконта и проект следует принять. Если
ЧДД равен нулю, то прибыльность равна норме дисконта. Если ЧДД меньше нуля, то
прибыльность инвестиций ниже нормы дисконта и от этого проекта следует
отказаться. При сравнении альтернативных проектов предпочтение должно
отдаваться проекту с большим значением ЧДД.
Показатели эффективности следующие.
Важнейшим показателем эффективности
инвестиционного проекта является чистый денежный доход (другие названия ЧДД -
интегральный экономический эффект, чистая текущая приведенная стоимость, чистая
текущая стоимость, NetPresentValue, NPV)-накопленный дисконтированный эффект за
расчетный период. ЧДД рассчитывается по следующей формуле:
ЧДД= (6.1)
(6.1)
где  - чистая
прибыль, полученная в t-ом году от реализации инвестиционного проекта;
- чистая
прибыль, полученная в t-ом году от реализации инвестиционного проекта;
 - амортизационные отчисления в t-ом
году;
- амортизационные отчисления в t-ом
году;
 - инвестиции, необходимые для
реализации проекта в t-ом году;
- инвестиции, необходимые для
реализации проекта в t-ом году;
Е - норма дисконта (является
экзогенно задаваемым основным экономическим нормативом) - это коэффициент
доходности инвестиций;
 - коэффициент дисконтирования в t-ом
году, позволяет привести
- коэффициент дисконтирования в t-ом
году, позволяет привести
величины затрат и прибыли на момент
сравнения (t).
Если ЧДД > 0, проект следует
принимать;
ЧДД = 0, проект ни прибыльный, ни
убыточный;
ЧДД < 0, проект убыточный и его
следует отвергнуть.
Метод чистого дисконтированного
дохода не дает ответа на все вопросы, связанные с экономической эффективностью
капиталовложений. Этот метод дает ответ лишь на вопрос, способствует ли
анализируемый вариант инвестирования росту ценности фирмы или богатства
инвестора вообще, но никак не говорит об относительной мере такого роста. А эта
мера всегда имеет большое значение для любого инвестора. Для восполнения такого
пробела используется иной показатель - метод расчета рентабельности инвестиций.
Индекс доходности дисконтированных
инвестиций (другие названия - ИД, рентабельность инвестиций,
ProfitabilityIndex,PI) - отношение суммы дисконтированных элементов денежного
потока от операционной деятельности к абсолютной величине дисконтированной
суммы элементов денежного потока от инвестиционной деятельности. ИД равен
увеличенному на единицу отношению ЧДД (NPV) к накопленному дисконтированному
объему инвестиций.
Формула для определения ИД имеет
следующий вид:
 (6.2)
(6.2)
Если ИД > 1 - проект эффективен;
ИД < 1 - проект неэффективен.
В отличие от ЧДД индекс доходности
является относительным показателем, что позволяет осуществлять выбор одного
проекта из ряда альтернативных, имеющих приблизительно одинаковое значение ЧДД.
Внутренняя норма доходности (другие
названия - ВНД, внутренняя норма дисконта, внутренняя норма прибыли, внутренний
коэффициент эффективности, IRR).
Внутренней нормой доходности
называется такое положительное число Ев, что при норме дисконта Е=Ев ЧДД
проекта обращается в 0, при всех больших значениях Е - отрицательна, при всех
меньших значениях Е - положительна. Если не выполнено хотя бы одно из этих
условий, считается, что ВНД не существует.
ВНД определяется из равенства:
 (6.3)
(6.3)
Величина ВНД, найденная из этого
равенства, сравнивается с заданной инвестором величиной дохода на капитал  . Если
. Если  - проект
эффективен. Смысл расчета этого коэффициента при анализе эффективности
планируемых инвестиций заключается в следующем: ВНД показывает максимально
допустимый относительный уровень расходов при реализации проекта. Например,
если проект полностью финансируется за счет ссуды коммерческого банка, то
значение ВНД показывает верхнюю границу допустимого уровня банковской
процентной ставки, превышение которой делает проект убыточным.
- проект
эффективен. Смысл расчета этого коэффициента при анализе эффективности
планируемых инвестиций заключается в следующем: ВНД показывает максимально
допустимый относительный уровень расходов при реализации проекта. Например,
если проект полностью финансируется за счет ссуды коммерческого банка, то
значение ВНД показывает верхнюю границу допустимого уровня банковской
процентной ставки, превышение которой делает проект убыточным.
На практике любое предприятие
финансирует свою деятельность, в том числе и инвестиционную, из различных
источников.
За пользование авансированными
финансовыми ресурсами предприятия уплачивают проценты, дивиденды,
вознаграждения и т. п., то есть несут определенные обоснованные расходы на
поддержание своего экономического потенциала. Показатель, характеризующий
относительный уровень этих расходов, называют «ценой» авансированного капитала
(СС). Этот показатель характеризует минимум возврата на вложенный в
деятельность предприятия капитал, его рентабельность.
Для инвестиций справедливо утверждение
о том, что чем выше норма дисконта (Е), тем меньше величина интегрального
эффекта (NPV), что как раз и иллюстрирует рисунок 6.1.
Рисунок 6.1 - Зависимость величины
ЧДД от уровня нормы дисконта Е
Как видно из рисунка 6.1, ВНД - это
та величина нормы дисконта (Е), при которой кривая изменения ЧДД пересекает
горизонтальную ось, т.е. ЧДД оказывается равным нулю.
Экономический смысл этого показателя
заключается в следующем:
если ВНД > СС, то проект следует
принять;
если ВНД < СС, то проект следует
отклонить;
если ВНД = СС, то проект ни
прибыльный, ни убыточный.
Точный расчет ВНД возможен только на
компьютере или калькуляторе с встроенной функцией для расчета.
Если при решении равенства (6.3)
функция ВНД имеет несколько корней, то данный критерий неприменим.
Сроком окупаемости инвестиций с
учетом дисконтирования называется продолжительность периода от начального
момента до момента окупаемости с учетом дисконтирования.
Начальный момент указывается в
задании на проектирование (обычно это начало операционной деятельности). Момент
окупаемости - это тот наиболее ранний момент, когда поступления от
производственной деятельности предприятия начинают покрывать затраты на
инвестиции.
Алгоритм расчета срока окупаемости Ток
зависит от равномерности распределения прогнозируемых доходов от инвестиций.
Если доход распределен по годам равномерно, то срок окупаемости рассчитывается
делением единовременных затрат на величину годового дохода, обусловленного ими.
Если доход по годам распределен
неравномерно, то срок окупаемости рассчитывается прямым подсчетом числа лет, в
течение которых инвестиции будут погашены кумулятивным доходом.
Используя показатель срока
окупаемости (Ток) при анализе, следует обратить внимание на ряд его недостатков:
не учитывает влияния доходов
последних периодов;
не обладает свойством аддитивности;
не делает различия между проектами с
одинаковой суммой кумулятивных доходов, но различным распределением их по
годам, если при расчете срока окупаемости использовать не дисконтированные
величины.
Помимо рассмотренных выше
показателей эффективности инвестиционных проектов в Методических рекомендациях
предусмотрено применение нижеследующих показателей:
чистый доход;
потребность в дополнительном
финансировании;
индексы доходности затрат и
инвестиций.
Чистым доходом называется
накопленный эффект за расчетный период (сальдо денежного потока).
Потребность в дополнительном
финансировании (ПФ) - максимальное значение абсолютной величины отрицательного
накопительного сальдо от инвестиционной и операционной деятельности. Величина
ПФ показывает минимальный объем внешнего финансирования проекта, необходимый
для обеспечения его финансовой реализуемости. Поэтому ПФ называют еще капиталом
риска.
Индекс доходности затрат - отношение
суммы денежных притоков (накопительных поступлений) к сумме денежных оттоков
(накопленным платежам).
Индекс доходности инвестиций -
отношение суммы элементов денежного потока от операционной деятельности к
абсолютной величине суммы элементов денежного потока от инвестиционной
деятельности [10].
.2 Характеристика объекта внедрения
Так как темой дипломного проекта
является автоматизация резервуарного парка ЛПДС «Черкассы» и рассматривается
внедрение радарного уровнемера, то в данной главе целесообразно оценить
экономическую эффективность его применения.
Рассматриваемое научно-техническое
мероприятие позволяет избежать:
переполнения с соответствующими
последствиями из-за превышения предельно допустимого уровня нефтепродуктов;
сокращение затрат на ремонт и
обслуживание оборудования.
Внедрение радарного уровнемера
позволит использование его в более суровых температурных условиях, что
свойственно для территориального места расположения объекта внедрения.
Необходимость модернизации старой
системы уровнемера вызвано:
зависимость показаний датчика от
поплавка (в случае зависания, заклинивания);
не большой срок службы;
необходимость регулярной регулировки
нуля;
низкое быстродействие;
Цель расчета - определить
экономический эффект от внедрения радарного уровнемера ЛПДС «Черкассы».
.3 Расчет капиталовложений
К капитальным вложениям относятся
затраты на приобретение оборудования, монтаж и наладку приборов. Стоимостные
показатели предоставлены плановым отделом приведены в таблице 6.1.
Объём капиталовложений рассчитывается
по формуле:
КВ = Зоб +Зпнр+Зсмр,
(6.4)
где КВ - объём капиталовложений,
тыс. рублей;
Зоб - затраты на оборудование, тыс.
рублей;
Зпнр - затраты на пуско-наладочные
работы (ПНР), тыс. рублей;
Зсмр - затраты на
строительно-монтажные работы (СМР), тыс. рублей.
Капитальные вложения должны
учитывать транспортные и монтажные расходы, которые определяются в процентах от
стоимости приборов и средств автоматизации.
Капитальные вложения также приведены
в таблице 6.1.
Таблица 6.1 - Капитальные вложения
на средства автоматизации
|
Виды
затрат
|
Сумма,
тыс. рублей
|
|
Стоимость
радарного уровнемера
|
70,00
|
|
Строительно-монтажные
работы
|
25,00
|
|
ИТОГО
|
95
|
КВ = 95 тыс. руб. Данный укрупненный показатель
стоимости включает в себя приобретение, установку, подключение уровнемера.
.4 Формирование эксплуатационных затрат
Годовые эксплуатационные затраты, связанные с
обслуживанием и эксплуатацией приборов, средств или систем автоматизации,
рассчитываются по следующей формуле:
 , (6.5)
, (6.5)
где Звспом - затраты на
вспомогательные материалы;
Зрем - затраты на ремонт;
Зобор - затраты на обслуживание
оборудования, т.е. на заработную плату работника, занимающегося обслуживанием;
Зам - амортизационные отчисления по
приборам, средствам автоматизации, внедряемому оборудованию;
Зпр - прочие затраты.
Затраты на вспомогательные материалы
составляют 20% от стоимости капитальных вложений:
 (6.6)
(6.6)
 тыс. рублей.
тыс. рублей.
Затраты на ремонт оборудования
составляют 25 % от капитальных вложений:
 (6.7)
(6.7)
 тыс. рублей.
тыс. рублей.
Затраты на амортизацию составляют
10% от капитальных вложений, т.к. эксплуатационный срок оборудования 10 лет:
 , (6.8)
, (6.8)
где На - норма амортизации.
 тыс. рублей.
тыс. рублей.
Затраты на содержание и эксплуатацию
оборудования составляют 40% от капитальных вложений:
 (6.9)
(6.9)
 тыс. рублей.
тыс. рублей.
Затраты системы на потребление
электроэнергии составляют:
 , (6.10)
, (6.10)
где Wy- установленная
электромощность, 5 кВт;- число рабочих часов, (24·365 = 8760);э - тариф на
электроэнергию, руб./кВт·ч (2,4).
Из формулы (6.10) имеем:
 тыс. рублей.
тыс. рублей.
Величина прочих затрат принимается
равной 25% от суммы других затрат:
 (6.11)
(6.11)
 тыс. рублей.
тыс. рублей.
Результаты расчета эксплуатационных затрат
представлены в таблице 6.
Таблица 6.2 - Текущие затраты при
использовании радарного уровнемера
|
Наименование
затрат
|
Результат,
тыс. рублей.
|
|
Вспомогательные
материалы (0,2* КВ)
|
19
|
|
Ремонт
(0,25*КВ)
|
23,75
|
|
Затраты
от потерь энергии (Wу·Тр·Sэ)
|
105,12
|
|
Амортизация
(На*КВ)
|
9,5
|
|
Прочие
(0,25*(стр.1+2+3+4+5))
|
48,84
|
|
Эксплуатационные
издержки
|
244,21
|
.5. Формирование выгод от проекта
После внедрения радарного уровнемера
экономическая эффективность определяется по формуле:
 , (6.12)
, (6.12)
где Ц - оптовая цена предприятия
на продукцию;
С - себестоимость дополнительно
полученной продукции;н - объем дополнительно добытой продукции.
 тыс. рублей.
тыс. рублей.
Экономия затрат на ремонт
оборудования при своевременном обнаружении аварийной ситуации:
 , (6.13)
, (6.13)
где Зр- затраты на ремонт, Зр=23,75
тыс. рублей;
Зр=23,75
тыс. рублей;
Ка- коэффициент аварийного ремонта,  Ка=0,35;
Ка=0,35;
Коб- коэффициент обнаружения места
аварии, Коб=0,95.
Тогда по формуле 6.13 получим:

 тыс. рублей.
тыс. рублей.
Исходные данные для расчета
экономического эффекта приведены ниже в таблице 6.4.
Таблица 6.4 - Исходные данные для
расчета экономического эффекта
|
Наименование
параметра
|
Величина
|
|
Капитальные
вложения, тыс. рублей
|
85
|
|
Эксплуатационные
издержки, тыс. рублей
|
244,21
|
|
Амортизация,
тыс. рублей
|
8,5
|
|
Экономия
затрат, тыс. рублей
|
390,25
|
|
Ставка
дисконта, %
|
20
|
|
Величина
расчетного периода, лет
|
10
|
При расчете экономической эффективности
инвестиционного проекта расчетный период Т складывается из времени внедрения
объекта в производство, которое принимается равным одному году, и времени эксплуатации
объекта, которое составляет 10 лет. Результаты расчета налога на имущества
заносим в таблицу 6.5.
Проводим расчеты экономической эффективности
проекта для всех расчетных годов по приведённым формулам, а результаты
вычислений заносим в таблицу 6.5. Коэффициенты дисконтирования рассчитываем
исходя из стоимости капитала для предприятия равной 20%.
Таблица 6.5 - Расчет налога на имущество
|
|
Год
|
|
Показатель
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
Стоимость
основных фондов на начало года, тыс. рублей
|
95
|
85,5
|
76
|
66,5
|
57
|
47,5
|
38
|
28,5
|
19
|
9,5
|
|
Амортизационные
отчисления, тыс. рублей
|
9,5
|
9,5
|
9,5
|
9,5
|
9,5
|
9,5
|
9,5
|
9,5
|
9,5
|
9,5
|
|
Стоимость
основных фондов на конец года, тыс. рублей
|
85,5
|
76
|
66,5
|
57
|
47,5
|
38
|
28,5
|
19
|
9,5
|
0
|
|
Среднегодовая
стоимость основных фондов, тыс. рублей
|
90,25
|
80,75
|
71,25
|
61,75
|
52,25
|
42,75
|
33,25
|
23,75
|
14,25
|
4,75
|
|
Налог
на имущество, тыс. рублей
|
1,805
|
1,615
|
1,425
|
1,235
|
1,045
|
0,855
|
0,665
|
0,475
|
0,285
|
0,095
|
Таблица 6.6 - Расчет эффективности проекта
|
Показатель
|
Год
|
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
10
|
|
Капитальные
вложения, тыс. рублей
|
95
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
Выгоды,
тыс. рублей
|
-
|
390,25
|
390,25
|
390,25
|
390,25
|
390,25
|
390,25
|
390,25
|
390,25
|
390,25
|
390,25
|
|
Эксплуатационные
затраты, тыс. рублей
|
-
|
244,21
|
244,21
|
244,21
|
244,21
|
244,21
|
244,21
|
244,21
|
244,21
|
244,21
|
244,21
|
|
Амортизация,
тыс. рублей
|
-
|
9,50
|
9,50
|
9,50
|
9,50
|
9,50
|
9,50
|
9,50
|
9,50
|
9,50
|
9,50
|
|
Налог
на имущество, тыс. рублей
|
-
|
1,81
|
1,62
|
1,43
|
1,24
|
1,05
|
0,86
|
0,67
|
0,48
|
0,29
|
0,10
|
|
Валовая
прибыль, тыс. рублей
|
-
|
144,24
|
144,43
|
144,62
|
144,81
|
145,00
|
145,19
|
145,38
|
145,57
|
145,76
|
145,95
|
|
Налог
на прибыль, тыс. рублей
|
-
|
28,85
|
28,89
|
28,92
|
28,96
|
29,00
|
29,04
|
29,08
|
29,11
|
29,15
|
29,19
|
|
Чистый
операционный доход, тыс. рублей
|
-
|
124,89
|
125,04
|
125,19
|
125,34
|
125,50
|
125,65
|
125,80
|
125,95
|
126,10
|
126,26
|
|
Сальдо
денежного потока, тыс. рублей
|
-
|
134,39
|
134,54
|
134,69
|
134,84
|
135,00
|
135,15
|
135,30
|
135,45
|
135,60
|
135,76
|
|
Сальдо
денежного потока от инвестиционной деятельности, тыс. рублей
|
-95
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
Сальдо
двух потоков (чистые денежные поступления проекта) , тыс. рублей
|
-95
|
134,39
|
134,54
|
134,69
|
134,84
|
135,00
|
135,15
|
135,30
|
135,45
|
135,60
|
135,76
|
|
Коэффициент
дисконтирования, тыс. рублей
|
1,00
|
0,87
|
0,76
|
0,66
|
0,57
|
0,50
|
0,43
|
0,38
|
0,33
|
0,28
|
0,25
|
|
Чистые
дисконтированные денежные поступления проекта, тыс. рублей
|
-95
|
116,8591
|
101,7316
|
88,56218
|
77,09749
|
67,11687
|
58,42821
|
50,86428
|
44,2795
|
38,54712
|
33,55681
|
По результатам расчета экономической
эффективности построим финансовый профиль инвестиционного проекта для
определения срока окупаемости (рисунок 6.2). Изменение денежных потоков
наличности изображено на рисунке 6.3.
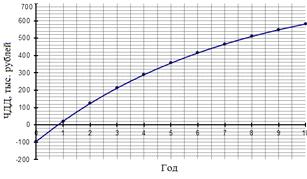
Рисунок 6.2 - Финансовый профиль проекта
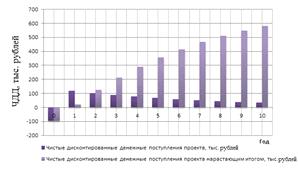
Рисунок 6.3 - Изменение денежных потоков
наличности
Как видно из рисунка 6.2, срок окупаемости
проекта составляет около 1 года.
Внутреннюю норму доходности определим по графику
на рисунке 6.4.
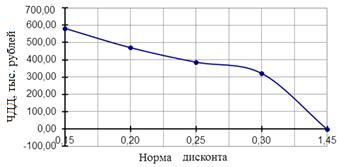
Рисунок 6.4 - Определение внутренней нормы
доходности
Как видно из рисунка 6.4 внутренняя норма
доходности данного проекта равно примерно 140%.
Обобщающие экономические показатели
эффективности проекта приведем в таблице 6.7.
Таблица 6.7 - Эффективность проекта
|
Показатель
|
Значение
|
|
Инвестиции,
тыс. рублей
|
95
|
|
Расчетный
период, лет
|
10
|
|
Годовые
выгоды, тыс. рублей
|
390,25
|
|
Ставка
дисконтирования, %
|
15
|
|
Чистый
дисконтированный доход, тыс. рублей
|
582,04
|
|
Индекс
доходности, доли едениц
|
7,13
|
|
Внутренняя
норма доходности, %
|
140
|
|
Срок
окупаемости, лет
|
1
|
Оценивая эффективность внедрения радарного
уровнемера можно сделать вывод, что данный проект целесообразен. Дает хороший
прирост в бюджете организации и окупается за довольно короткий срок
ЗАКЛЮЧЕНИЕ
В дипломном проекте рассмотрен и произведен
анализ существующего уровня автоматизации резервуарного парка линейно
производственно-диспетчерской службы «Черкассы», где наиболее важным для
стабильной и бесперебойной работы, является стабильность заданных характеристик
технологического процесса, контролируемых соответствующими средствами
измерений, в частности, радарным уровнемером.
В ходе проведенных исследований были получены
следующие результаты:
проведен анализ работы автоматизированной
системы управления;
на основе расчетных данных предлагается замена
уровнемера РУПТ-А на более современный радарный уровнемер RTG 3490 REX.
Модернизированная система управления позволяет:
повысить точность измерения и регулирования
параметров технологического процесса;
повысить оперативность действий обслуживающего
персонала;
уменьшить вероятность возникновения аварийных
ситуаций.
Предлагаемый проект обеспечит повышение
надежность системы противоаварийной защиты с целью поддержания технологического
оборудования и производства в безопасном состоянии.
Экономически замена уровнемера полностью
оправдана, так как срок окупаемости составляет по расчетам меньше года.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
Мустафин,
Ф.М. Резервуары для нефти и нефтепродуктов: том 1. Консрукции и оборудование:
учебник для вузов / Ф. М. Мустафин, Р.А. Жданов, М.Г. Каравайченко и др.-
СПб-Недара, 2010.-480 с.
Коновалов,
Н.И. Оборудование резервуаров / Н. И. Коновалов, Ф. М. Мустафин, Г. Е. Коробков
- Уфа: ДизайнПолиграфСервис, 2005. - 214 с.
Методические
указания по проведению патентных исследований при дипломном проектировании для
студентов специальности 0634 дневного и заочного обучения. / Под редакцией
Праховой М.Ю., 1998. - 13 с.
Ястребенецкий,
М.А., Иванова, Г.М. Надежность автоматизированных систем управления
технологическими процессами: Учебное пособие для вузов. - М.: Энергоатомиздат,
1989. - 264 с.
Гилязов,
А.А., Абдрахманов, Ю.Р. Учебно-методическое пособие к выполнению радела
«Безопасность и экологичность» в выпускных квалификационных рабтах по
направлению подготовки 220300 «Автматизированные технологии и производства»
специальности 220301 «Автоматизация технологических процессов и производств»
(по отраслям) - Уфа: УГНТУ, 2009. - 19 с.
Методические
рекомендации по экономическому обоснованию дипломных проектов (для студентов
специальности 14.06.04 «Автоматизация технологических процессов и
производств»)/ Под редакцией Бирюковой В.В. - Уфа: