Регулировка температуры в помещениях
Введение
В данном курсовом проекте разрабатывается
система телерегулирования. Назначение данной системы - регулировка температуры
в помещениях. Данная система позволит уменьшить и оптимизировать энергетические
затраты.
Телерегулирование (ТР), - регулирование на
расстоянии, осуществляемое средствами телемеханики; вид телеуправления, при
котором измерительная информация о текущем значении регулируемого параметра
передаётся по каналу телеизмерения на пункт управления, где сравнивается с
заданным значением этого параметра, а сигнал рассогласования, вырабатываемый в
результате сравнения, по каналу телеуправления передаётся на контролируемый
пункт, где он преобразуется в управляющее воздействие. При этом оператор при
помощи устройств телеизмерения следит за изменением значения управляемого
параметра. Как только текущее значение параметра становится равным заданному,
оператор посылает команду, прекращающую дальнейшее воздействие на объект
управления. При управлении объектами с большим числом параметров по каналу телеуправления
обычно передают требуемое значение параметра (уставку), а выработка сигналов
рассогласования и управляющих воздействий (непосредственно регулирование)
осуществляется на самом объекте. Канал телеизмерения при этом используется для
контроля правильности работы системы. Если уставки вырабатываются автоматом, то
система называется телеавтоматической, если оператором, - телемеханической.
Проектируемое устройство телерегулирования
предназначено для телеизмерения текущих параметров (ТИТ) объекта телеуправления
многопозиционными регуляторами и их корректировки с помощью команд
"больше/меньше".
К устройству ТР предъявляются следующие
требования:
телеизмерение параметров осуществлять непрерывно
с соответствующей индикацией на световом щите по каждому параметру;
телеуправление многопозиционным регулятором
производить с помощью двух операций: подготовительной - выбором параметра
регулирования и исполнительной - посылкой команды "больше/меньше".
Режим перехода с одной операции на другую - автоматический;
обеспечить воспроизведение на световом щите с
помощью световых элементов процесса выбора регулируемого параметра.
Правильность набора нового значения параметра воспроизводить индикацией на
световом щите;
предусмотреть сигнализацию аварийного состояния
каждого объекта с помощью свечения общего символа "Авария",
сигнализацию неисправности канала связи свечением символа "Авария канала
связи".
в качестве исполнительных элементов использовать
контактные либо бесконтактные ключевые схемы и элементы индикации.
1. ОБЛАСТЬ ПРИМЕНЕНИЯ СИСТЕМЫ И ОПИСАНИЕ
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
Проектируемая система используется для задания и
поддержания определенной температуры в помещениях. Система поддерживает
необходимую температуру в семи помещениях. Для обогрева используется отопительное
оборудование(котел). В каждом помещении установлен датчик температуры, сигнал
выхода которого находится в пределах 0..5В. В качестве уставки задаются нижняя
и верхняя граница диапазона. Система определяет температуру в помещении, и если
она находится ниже заданной границы, включает отопительное оборудование. После
достижения верхней границы, отопление отключается.
2. СТРУКТУРА СИСТЕМЫ
2.1 Выбор структуры
системы
В соответствии с техническим заданием,
спроектируем следующую структурную схему системы телерегулирования. Данная
система будет состоять из пункта управления и десяти контролируемых пунктов, на
которых и будет происходить измерение параметров и их регулировка.
Телеизмерение будем производить по вызову командой с ПУ. В данной системе применим
автоматический циклический опрос датчика объекта. При поступлении запроса с
пункта управления на контролируемом пункте происходит измерение текущего
значения, преобразование его в форму удобную для обработки и передачи,
непосредственно передача результатов измерения на пункт управления. На пункте
управления они принимаются приемным устройством, преобразуются в форму удобную
для регистрации и выводятся на регистрирующий индикатор.
На стороне ПУ находится пульт, с которого
задаются уставки и передаются на устройство КП. На стороне КП уставка
принимается, и в соответствии с принятой уставкой, устройство осуществляет
автоматическое регулирование. Общая структурная схема система приведена на
рисунке 2.1.
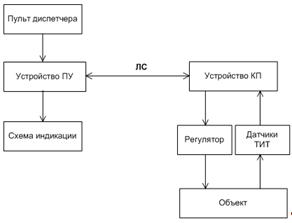
Рисунок 2.1 - Структурная схема системы
телерегулирования
.2 Выбор линии связи
Системы телемеханики разделяются по характеру
расположения объектов в пространстве на системы для сосредоточенных и
рассредоточенных объектов. Объекты могут быть рассредоточены вдоль общей линии
связи, по площади или в пространстве. Для сосредоточенных объектов характерно
то, что сам оператор и объекты управления расположены в двух раздельных
пунктах: пункте управления (ПУ) и контролируемом пункте (КП) и соединены в
единую систему управления с помощью аппаратуры телемеханики и канала связи.
Для системы с рассредоточенными объектами
управления подключается, по меньшей мере, несколько КП. Все данные системы
сводят к четырем основным видам: однолучевая (линейная), радиальная,
радиально-узловая, древовидная. Выбираем однолучевую линию связи.
2.3 Выбор структуры
сигналов
Со стороны ПУ на КП может быть два вида
сигналов. Первый вид - это сигнал с командой на изменение уставки, его
структура изображена на рисунке 2.2.

Рисунок 2.2-Структура сигнала посылаемого с ПУ
на КП. Команда ТУ
В состав данного сигнала входят:
СК - синхрокод, состоит из восьми единиц;
ФА - функциональный адрес, для команды изменения
уставки будет содержать комбинацию «001»;
НУ - номер уставки;
КС-контрольные символы;
КК - код конца.
Второй вид - это сигнал с командой на получение
ТИТ. Структура данного сигнала изображена на рисунке 2.3.

Рисунок 2.3-Структура сигнала посылаемого с ПУ
на КП. Запрос на получение данных ТС
В состав данного сигнала входят:
СК - синхрокод, состоит из восьми единиц;
ФА - функциональный адрес, для ТС будет
содержать комбинацию «010»;
НО- номер объекта телерегулирования;
КС-контрольные символы;
КК - код конца.
Со стороны КП на ПУ будут приходить сигнал с
квитанцией подтверждения выполнения команды изменения уставки. Структура данной
посылки представлена на рисунке 2.5.

Рисунок 2.4-Структура квитанции
ФА для квитанции «100».
Формат посылки при ответе на запрос ТИТ
представлен на рисунке 2.5.

Рисунок 2.5-Структура сигнала посылаемого с КП
на ПУ ответ на запрос ТИТ
В состав данного сигнала входят:
ФА - функциональный адрес (101)
НО- номер объекта телерегулирования;
ДД - данные с датчика;
КС-контрольные символы;
КК - код конца.
3. АЛГОРИТМ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ
3.1 Алгоритм
функционирования контролируемого пункта
Алгоритм функционирования контролируемого пункта
имеет вид, приведенный на листе 1 графического материала.
При запуске устройства устанавливается границы
уставки с номером один. Далее выполняется проверка наличия данных из линии
связи. Если данных нет, то для каждого датчик поочередного подключается к АЦП,
после чего запускается преобразование на АЦП. После завершения преобразования
величина измеряемого параметра в двоичной форме считывается. После чего
сравнивается с нижней границей уставки. Если обнаружен выход за границу, то для
соответствующего объекта подается сигнал включения. В следующем цикле
проверяется параметр на предмет выхода за верхнюю границу уставки, если выход
обнаружен, подается сигнал на выключение обогрева.
Если из линии связи получена посылка. То она
декодируется из кода с защитой на четность. При декодировании подсчитывается
число единиц. Если получено нечетное число единиц, значит, произошла ошибка, и
информация бракуется. Если ошибка не обнаружена то она обрабатывается дальше,
из неё выделяется функциональный адрес, который определяет тип посылки и
алгоритм её дальнейшей обработки.
Если ошибка не обнаружена то она обрабатывается
дальше, из неё выделяется функциональный адрес, который определяет тип посылки
и алгоритм её дальнейшей обработки.
Если полученная посылка - запрос ТИ, то
выделяется адрес объекта, после чего требуемый канал подключается к АЦП, далее
устройство КП запускает преобразование на АЦП, после завершение которого,
параметр считывается. Код параметра вместе с номером датчика, функциональным
адресом ответа на запрос ТИ группируются в сообщение, после чего оно кодируется
кодом с защитой на четность, выполняется скремблирование и отправляется в линию
связи.
Если в посылке была команда на изменение
уставки, то из посылки выделяется номер уставки и в соответствии с этим номер
устанавливаются новые границы.
3.2 Алгоритм
функционирования пункта управления
Алгоритм функционирования пункта управления
имеет вид, приведенный на листе 2 графического материала.
Если нет команды диспетчера, то устройство ПУ
циклически опрашивает все регулируемые объекты. Для чего формируется посылка из
ФА запроса ТИ, номера объекта. Кодовая комбинация кодируется кодом с защитой на
четность. При этом подсчитывается число единиц, если число четное то в
контрольный символ записывается 0, иначе - 1. Закодированная посылка отправляет
на КП. После чего ожидается ответ. Если ответ получен за время Аt,
принятые данные декодируются из кода с защитой на четность. После ТИТ
отправляется на печать. Если же ответ не получен или в ответе обнаружена
ошибка, то запрос повторяется. При этом увеличивается счетчик переспросов. Если
данный счетчик достигает значения три, то выводится сигнализация Авария канала
связи.
Если есть команда от диспетчера, то формируется
посылка с командой изменения уставки. Данные о номере уставки считываются с
пульта диспетчера. Вся посылка кодируется кодом с защитой на четность и
отправляется в линию связи. После чего в течение времени At
ожидается квитанция. Если квитанция пришла, то сигнализируется о прохождении
команды, в противном случае - о не прохождении.
Когда отработка команды диспетчера закончена, то
система возвращается к получению измерений.
4. РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ СИСТЕМЫ
4.1 Структурная схема
контролируемого пункта
В соответствии с алгоритмом работы КП,
разработаем структурную схему КП. Данная схема приведена на листе 3
графического материала курсового проекта.
Данные из линии связи поступают через
демодулятор. Далее, через преобразователь из последовательного кода в
параллельный, на блок декодирования из кода с защитой на четность. При
получения данных с модема, сигнал с демодулятора поступает на устройство
синхронизации, которое определяет моменты считывания бит для преобразователя
последовательного кода в параллельный. Синхронизация осуществляется по всем
принимаемым данным. Посылка после преобразователя обрабатываются асинхронно, то
есть после выполнения работы одним блоком, начинается работа следующего.
Если ФА запрос ТИ, то БРР считывает данные из
блока выделения адреса объекта, и выдает его на коммутатор. После подключения
требуемого канала, запускается АЦП. Двоичный код с выхода АЦП поступает на
устройство формирования посылки, куда с БРР подается ФА ответа на запрос ТИТ.
Сформированная посылка кодируется кодом с защитой на четность, блоком
кодирования в соответствующий код, после чего скремблер, формирует требуемый
энергетический спектр. Далее через преобразователь параллельного кода в
последовательный посылка поступает на модулятор, где модулируется и через
линейный блок передается в линию связи. Линейный блок согласовывает сигнал
модулятора и линии связи.
Если ФА- команда на замену уставки, то
считывается новый номер уставки из блока выделения номера уставки и
записывается в регистр. Новый номер поступает на блок хранения границ уставок,
на выходе которого появляются новые границы в соответствии с поданным номером.
БРР управляет регулированием параметров в
соответствии с полученными уставками. Для чего на коммутатор поочередно
подаются все адреса каналов. В результате канал подключается к АЦП, двоичный код
с АЦП поступает на устройство определения выхода за границы уставки. Данное
устройство сравнивает текущее значение с уставкой, если обнаруживается выход за
границы, сигнал подается на устройство формирования управляющих сигналов,
откуда идет управления на блок выходных реле. В зависимости от того вышел
параметр за нижнюю или верхнюю границу подается сигнал на включение или
отключение реле соответствующего объекта.
4.2 Структурная схема
пункта управления
В соответствии с алгоритмом работы ПУ,
разработаем структурную схему ПУ. Данная схема приведена на листе 4
графического материала курсового проекта.
Функцию управления процессом опроса всех
объектов, а также передачей команд диспетчера выполняет блок управления БУ. Для
опроса на КП отправляются запросы сформированные соответствующим устройством.
Если нет команды диспетчера, то запрос формируется ФА запроса ТИ и номера
очередного параметра. Сформированный запрос кодируется в код с защитой на
четность соответствующим устройством и передающим модулем через преобразователь
из параллельного кода в последовательный и модулятор передается в линию связи.
Если есть команда диспетчера, то подается сигнал с блока дешифрации команд на
устройство формирования запроса. Вместе с сигналом запуска передаются выбранные
номер уставки. На основании этих данных формируется посылка и передаётся
вышеуказанным образом.
Ответ со стороны КП приходит через демодулятор,
откуда поступает на преобразователь из последовательного кода в параллельный.
Далее на блок декодирования из кода с защитой на четность. Если обнаружена
ошибка, то подается соответствующий сигнал на БУ. Декодированная кодовая
комбинации записывается в буфер.
В зависимости от ФА запускается блок выделения
кода параметра или устройство анализа параметра на предмет выхода за границы
уставки. Блоком управления печатью принятое измерение передаётся на принтер.
Устройством анализа сравниваются полученные
значения, и если обнаружен выход за границы уставки, подается сигнал на блок
аварийной индикации.
5. ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА СИСТЕМЫ
5.1 Выбор элементной
базы системы
Данная система телерегулирования организована на
микропроцессорной логике, поскольку в настоящее время оптимальным является
использование микроконтроллеров (устройств, включающих в себя арифметико-логическое
устройство, ОЗУ, ПЗУ, порты для работы с внешними устройствами и др.). Кроме
того микропроцессорная логика обладает определенными преимуществами. Габариты
схемы существенно уменьшаются. Следовательно, основная работа возлагается на
написание программы, предназначенной для обработки принимаемой информации,
кодирования, хранения и работы с линией связи. Из-за уменьшения количества
элементов, входящих в систему, увеличивается ее надежность. Кроме того, в
дальнейшем без существенных затрат можно изменить алгоритм работы системы на
более рациональный. Существуют и недостатки применения данной логики. Основным
недостатком является низкое быстродействие - если время обработки данных на
жесткой логике составляет десятки наносекунд, то на микропроцессорной логике
для тех же операций может потребоваться до нескольких микросекунд. Тем не
менее, по полученным в четвертом разделе данным, система может тратить на
обработку данных доли миллисекунд. То есть вопрос о быстродействии является не
таким существенным.
Для построение устройств КП и ПУ используется AVR
микроконтроллер ATmega162
фирмы Atmel. К
достоинствам данного микроконтроллера относятся богатая периферия, аппаратная
поддержка ряда интерфейсов, высокое быстродействие, большой объем внутреннего
ОЗУ, встроенный АЦП.
Характеристики микроконтроллера:архитектура:
высокопроизводительных команд, большинство
команд выполняется за один тактовый цикл
-32 8-разрядных рабочих регистра общего
назначения
Полностью статическая работа
Производительность приближается к 16 MIPS (при
тактовой частоте 16 МГц)
Встроенный 2-цикловый перемножитель
Энергонезависимая память программ и данных:
- 64 Кбайт
внутрисистемно
программируемой
Flash памяти
(In-System Self-Programmable Flash)
-Обеспечивает 1000 циклов стирания/записи
Дополнительный сектор загрузочных кодов с
независимыми битами блокировки
Внутрисистемное программирование встроенной
программой загрузки:
Обеспечен режим одновременного чтения/записи
(Read-While-Write)
2Кбайта EEPROM
Обеспечивает 100000 циклов стирания/записи
Кбайт встроенной SRAM
До 64 Кбайтов пространства дополнительной
внешней памяти
Программируемая блокировка, обеспечивающая
защиту программных средств пользователя
SPI интерфейс для внутрисистемного
программированияпользователя
Интерфейс JTAG (совместимый с IEEE 1149.1)
Возможность сканирования периферии,
соответствующая стандарту JTAG
Расширенная поддержка встроенной отладки
Программирование через JTAG интерфейс: Flash,
EEPROM памяти, перемычек и битов блокировки
Встроенная периферия
Два 8-разрядных таймера/счетчика с отдельным
предварительным делителем, один с режимом сравнения
Два 16-разрядных таймера/счетчика, с
расширенными возможностями, с отдельным предварительным делителем и режимами
захвата и сравнения
Счетчик реального времени с отдельным
генератором
Два 8-разрядных канала PWM
Шесть каналов PWM с возможностью
программирования разрешения от 1 до 16 разрядов
8-канальный 10-разрядный аналого-цифровой
преобразователь
8 несимметричных каналов
7 дифференциальных каналов
2 дифференциальных канала с программируемым
усилением в 1, 10 или 200 крат
Байт-ориентированный 2-проводный
последовательный интерфейс
Сдвоенный программируемый последовательный USART
Последовательный интерфейс SPI (ведущий/ведомый)
Интерфейс I2C
Программируемый сторожевой таймер с отдельным
встроенным генератором
Встроенный аналоговый компаратор
Специальные микроконтроллерные функции
Сброс по подаче питания и программируемый
детектор кратковременного снижения напряжения питания
Встроенный калиброванный RC-генератор
Внутренние и внешние источники прерываний
Шесть режимов пониженного потребления: Idle,
Power-save, Power-down, Standby, Extended Standby и снижения шумов ADC
Программная установка тактовой частоты
Режим обеспечения совместимости с ATmega103
(перемычки)
Глобальный запрет подтягивающих резисторов
В качестве АЦП выбран микросхема MAX186
фирмы MAXIM. MAX186,
MAX188 - высокоскоростные низко потребляющие 12 битные системы сбора и
накопления данных, которые содержат 8 канальный мультиплексор, широкополосное
УВХ и последовательный интерфейс. Приборы работают от однополярного +5 В или
двухполярного ±5 В источника питания. Аналоговые входы программно могут быть
настроены на работу с униполярными или биполярными сигналами, а также на работу
в несимметричном или дифференциальном режиме.
-проводный последовательный интерфейс позволяет
обмениваться данными напрямую с другими устройствами, имеющими SPI, QSPI и
Microwire совместимые интерфейсы. Выход последовательного строба позволяет
напрямую подключать приборы к DSP семейства TMS320. Для работы MAX186/MAX188
могут использовать тактовые импульсы от встроенного задающего генератора или
тактовые импульсы последовательного интерфейса. При использовании для работы
АЦП тактовых импульсов встроенного генератора, данные по последовательному
интерфейсу могут передаваться с частотой более 4 МГц.имеет встроенный 4.096 В
ИОН, в то время как MAX188 требуется внешний ИОН. Оба прибора имеют входной
буферный усилитель, который упрощает подстройку коэффициента усиления./MAX188
имеют вывод nonSHDN аппаратной инициализации дежурного режима и два программно
инициализируемых режима пониженного потребления мощности. Возможность
активизации приборов по последовательному интерфейсу и малое время выхода из
дежурного режима позволяет отключать MAX186/MAX188 между преобразованиями. При
этом на низких частотах преобразования можно снизить потребляемый ток до 10
мкА.
В качестве ЦАП используется микросхема MAX5258.
Микросхемы MAX5258 содержат по восемь 8-разрядных цифро-аналоговых
преобразователей с выходными буферами и логикой последовательного интерфейса.
Микросхема MAX5258 способна работать от однополярного напряжения +5 В или от
двуполярного напряжения ±5 В. Она оснащена входом установки режима Shutdown,
при котором потребление составляет 50 мкА а все внутренние данные DAC сохраняются.
Для каждой пары из 8 аналоговых выходов отдельно
программируются три режима выхода. Небуферированный режим соединяет внутреннюю
R-2R цепочку непосредственно к выходному выводу, что способствует снижению
потребления и исключает ошибку буфера по постоянному току. Полностью
буферированный режим вводит буфер между R-2R цепочкой и выходом, обеспечивая
режим вывода +5/-2 мА. Режим полубуферированного вывода подобен полностью
буферированному, но потребление в этом режиме несколько меньше, хотя
обеспечивается выход с током до 15 мА в однополярной конфигурации выхода.
В качестве дисплея для отображения вводимых
команд диспетчера выбираем модуль MT-24C.
Модуль позволяет отображать 4 строки по 10 символов. Символы отображаются в
матрице 5х8 точек. Между символами имеются интервалы шириной в одну
отображаемую точку. Каждому отображаемому на ЖКИ символу соответствует его код
в ячейке ОЗУ модуля. Модуль содержит два вида памяти - кодов отображаемых
символов и пользовательского знакогенератора, а также логику для управления ЖК
панелью. Модуль управляется по параллельному 4-х или 8-ми битному интерфейсу.
Модуль содержит контроллер HD44780 фирмы HITACHI. В нем ОЗУ размером 160 байт
для хранения данных (DDRAM), выводимых на ЖКИ.
Таблица 5.1- Функции выводов MT-24C
|
Вывод
|
Назначение
|
|
GND
|
Общий
вывод (0В)
|
|
UCC
|
|
Uo
|
Управление
контрастностью
|
|
A0
|
Адресный
сигнал - выбор между передачей данных и команд управления
|
|
R/W
|
Выбор
режима записи или чтения
|
|
E
|
Разрешение
обращений к модулю (а также строб данных)
|
|
Вывод
|
Назначение
|
|
DB0
|
Шина
данных (8-ми битный режим)(младший бит в 8-ми битном режиме)
|
|
DB1
|
Шина
данных (8-ми битный режим)
|
|
DB2
|
Шина
данных (8-ми битный режим)
|
|
DB3
|
Шина
данных (8-ми битный режим)
|
|
Вывод
|
Назначение
|
|
DB4
|
Шина
данных (8-ми и 4-х битные режимы)(младший бит в 4-х битном режиме)
|
|
DB5
|
Шина
данных (8-ми и 4-х битные режимы)
|
|
DB6
|
Шина
данных (8-ми и 4-х битные режимы)
|
|
+LED
|
+
питания подсветки
|
|
-LED
|
-
питания подсветки
|
Структура контроллера HD44780
приведена на рисунке 5.1.
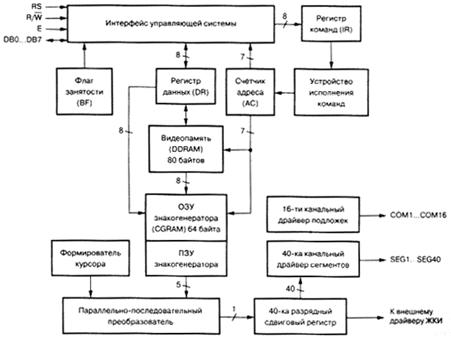
Рисунок 5.1-Структура контроллера HD44780
.2 Принципиальная
электрическая схема контролируемого пункта
Рассмотри работу электрической принципиальной
схемы КП изображенной на листе 3.
Основа устройства КП - микроконтроллер DD2.
Подключение микросхемы осуществляется по типовой схеме. Кварцевый резонатор ZQ1
и согласующие конденсаторы С1, С2 задают частоту внутреннему тактовому
генератору микроконтроллера.
Для передачи используется последовательный
интерфейс микроконтроллера (выход Tx),
который с заданной скоростью в последовательном виде выдает посылку. Далее
сигнал поступает на преобразователь уровней DA1,
который формирует полярный сигнал для работы модулятора. В качестве модулятора
используется схема приведенная на рисунке 7.1. Несущая частота подается на
первичную обмотку трансформатора T1,
а напряжение двоичных посылок - в средние точки трансформаторов T1
и T2.При
напряжении двоичных сигналов, большем, чем напряжение несущей, диоды VD1-VD2
будут являться электронными ключами, управляемыми только напряжением этих
сигналов. В таких условиях сопротивление открытых диодов можно принять равным
нулю, а сопротивление закрытых диодов - бесконечности. Учитывая сказанное, по
схеме легко проследить, что при поступлении положительной посылки диоды VD1
и VD4 открыты, а диоды VD2
и VD3 закрыты. В случае
поступления отрицательной посылки откроются диоды VD2
и VD3 и, наоборот,
закроются диоды VD1,
VD4. При переходе от
одной полярности посылки к другой фаза сигнала поворачивается на выходе схемы
на 180°.
Рисунок 5.2 -Схема ФПМ модулятора
Для приема данных из линии связи с ПУ
используется схема, приведенная на рисунке 5.3 построенная на основе кольцевого
преобразователя частоты.

Рисунок 5.3 -Схема ФМП
демодулятора
Для синхронизации приемника и
передатчика используется схема приведенная на рисунке 5.4. Входной сигнал DIN
по положительному фронту сигнала CLK записывается в триггер DD9.1,
а по отрицательному фронту - в триггер DD9.2.
Элемент Исключающее ИЛИ DD10.1
формирует сигнал лог. 1 при несовпадении сигналов на входе и выходе триггера DD9.2.
Элемент Исключающее ИЛИ DD10.2
формирует сигнал лог. 1 при несовпадении сигналов на выходах триггеров DD9.1
и DD9.2. Элементы DD8,DD11,DD5
формируют сигналы UP и DOWN на основе сигналов с выходов элементов DD10.1,
DD10.2, а также и
прямого и инверсного сигналов CLK. Сигнал CLK генерирует микроконтроллер, на
основании сигналов DOWN
(уменьшить частоту синхросигнала) и UP(увеличить
частоту синхросигнала) он уменьшает или увеличивает частоту следования
генерируемых импульсов.
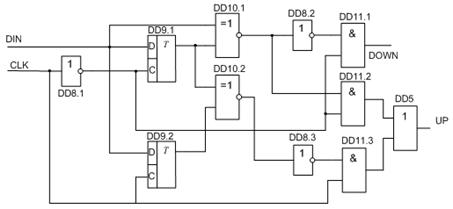
Рисунок 5.5 -Схема
синхронизации
Для считывания ТИТ используется 8-ми канальный
АЦП DD1, для
выдачи управляющих воздействий используется 8-ми канальный ЦАП DD3.
Для подключения данных микросхем используется последовательный SPI
интерфейс. Данный интерфейс поддерживается на аппаратном уровнем контроллера и
позволяет заметно упростить электрическую схему устройства. В интерфейсе три
линии. Линия MOSI служит
выходом данных, MISO
входом данных, по SCK
выдаются синхроимпульсы. Эти сигналы поступают на входы всех микросхем, что
упрощает схему, но обрабатывает только та, микросхема, на вход CS
которой находится низкий уровень. Таким образом возможно без конфликтное
подключения нескольких микросхем.
По фронту тактового импульса с линии SCK
микроконтроллера в сдвиговый регистр АЦП записывается бит управляющего байта c
выхода MOSI. По спаду
тактового импульса на выход DOUT
выдаётся бит данных, который считывается по линии MISO
микроконтроллера. Данный протокол поддерживается микроконтроллером программно.
Формат управляющего байта для АЦП представлен на рисунке 5.6.

Рисунок 5.6 -Формат управляющего байта
Start -«1» в этом
разряде при нулевом уровне на входе CS/,
говорит о том что идет управляющий байт.
SEL0..SEL2-биты
адреса коммутируемого канала.
UNI/BIP-определяет
вид сигнала униполярный или биполярный. В данной работе используется
униполярный сигнал и меняется от 0В до Uопорное.
SGL/DIF-однопроводное
или дифференциальное подключение. Этот бит в 1, так как используется
однопроводное подключение. Общие выходы датчиков объединены и подключаются ко
входу COM
DA1.
PD0..PD1
- Выбирается режим синхронизации и режим низкого потребления. В работе
используем встроенный в АЦП генератор. Поэтому PD1
-«1», PD0-«0».
Для опроса датчиков сначала в АЦП записывается
управляющее слова с первым адресом. После чего начинается преобразование, при
этом выход SSTRB переводится
в низкий уровень, после завершения преобразования SSTRB
- в высокий. Микроконтроллер анализирует состояние SSTRB
, и когда он переходит в высокий уровень, записывает новый управляющий байт со
следующим адресом. Одновременно с выхода DOUT
в последовательном виде получает двоичный код измерения для первого канала.
Для включения или отключения
объекта управления используются реле KV1-KV9.
Управление осуществляется с линий микроконтроллера PA0-PA7,
PB0-PB1,
через транзисторные ключи VT1-VT10.
Резисторы R1-R10
служат для ограничения тока базы транзисторов.
5.3 Принципиальная
электрическая схема пункта управления
Главным элементом ПУ является микроконтроллер
DD1, формирование сигнала сброс осуществляется так же, как и на КП, частота
определяется соответственно.
Номер уставки и другие управляющие команды
задается с ключей SW1-SW25.
SW1-SW10
служат для выбора объекта, где каждый ключ соответствует одному объекту. SW11-SW14
задаётся в двоичном виде код номера уставки.
Ключи подключаются в виде матрицы, контроллера
периодически опрашивает состояния клавиш. Для чего на каждый выход контроллера PB0-PB4
поочередно выдается высокий уровень. После выдачи очередной единицы на один из
выходов PB0-PB4,
считывается состояния выходов PD0-PD4.
Если один из ключей замкну, то на входе PB0-PB4
появляется логическая единица. Зная на каком из выходов PB0-PB4
был высокий уровень и состояние входов PD0-PD4
можно точно определить какой ключ замкнут.
Например, замкнут ключ SW8,
что соответствует выбранному 8-му объекту. На линию PB0
выдается высокий уровень потенциала, при этом на вход PD0-PD4
поступают состояния ключей SW5,
SW10, SW15,
SW20, SW25,
так как в примере они разомкнуты, на входах PD0-PD4
нет напряжения, контроллер считывает все нули. Когда на линию PB2
выдается высокий уровень, при этом ключ SW8
замкнут, через этот ключ с выхода PB2
подается напряжение на вход PD2.
После чего контроллер считывает по данному входу единицу, зная на какую из
линий выдавалась сканирующая единица, однозначно определяется какой объект
выбран.
После считывания состояния ключей в соответствии
с положением ключей отображается выбранная группа, параметр, и команда на ЖК
дисплее DD1 на основе
контроллера HD44780.
Структура приведена на рисунке 6.1. Выводы DB0-DB7 отвечают за
входящие/исходящие данные. Высокий уровень на выводе RS указывает индикатору,
что сигнал на выводах DB0-DB7 является данными, а низкий - командой.
Вывод W/R отвечает за направление данных, пишутся ли данные в память или
читаются из нее. Импульс на выводе Е (длительностью не менее 500 нс)
используется как сигнал для записи/чтения данных с выводов. Для вывода
информации на ЖК индикаторы сначала в контролер HD44780 записываются
управляющие символы, где устанавливается режим работы и начальный адрес, с
которого будет осуществляться запись кодов символов.
Запись управляющего слова осуществляется
следующим образом:
1. Установить значение линии RS в 0
2. Вывести значение байта данных на линии
шины DB0...DB7
. Установить линию Е = 1
. Установить линию E
= 0
. Установить линии шины DB0...DB7 =
HI(состояние высокого импеданса)
После записи управляющего слова, в контроллер
HD44780 записываются коды символов, причем после каждой записи указатель в ОЗУ
дисплея автоматически увеличивается на 1.
6. Установить значение линии RS в 1
7. Вывести значение байта данных на линии
шины DB0...DB7
. Установить линию Е = 1
. Установить линию E
= 0
. Установить линии шины DB0...DB7 =
HI(состояние высокого импеданса)
В общем виде временная диаграмма записи
представлена на рисунке 5.7.
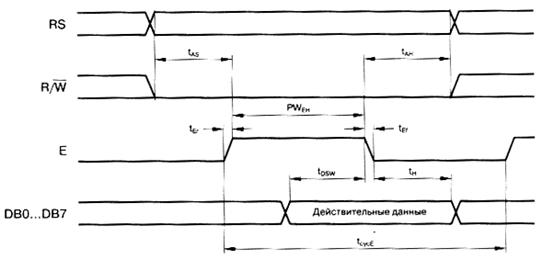
.67-Временная диаграмма операции записи в
контроллер дисплея HD44780
Схема модулятора и демодулятора устройства ПУ
аналогична схеме КП.
В качестве приемного устройства используются ПЭВМ,
который подключается по порту RS232.
Для его реализации используется последовательный интерфейс микроконтроллера
(выходы TxD0 и RxD0).
Для преобразования уровней между выводами контроллера и интерфкйсом RS232
используется микросхема DA3.
6. РАСЧЕТНАЯ ЧАСТЬ
6.1 Расчет частотных и
временных параметров
телерегулирование контролируемый
управление сигнал
В соответствии с теоремой Котельникова, время,
за которое необходимо опросить каждый датчик, определяется
 , примем
, примем  с. (6.1)
с. (6.1)
Число информационных символов  определяется
из выражения для приведенной погрешности
определяется
из выражения для приведенной погрешности  , откуда
, откуда
 , (6.2)
, (6.2)
где s - погрешность преобразования в цифровой
эквивалент.
Число символов необходимых для
кодирования номер объекта
 , (6.3)
, (6.3)
где  - количество регулируемых
параметров в системе.
- количество регулируемых
параметров в системе.
Число символов необходимых для
кодирования номера уставки:
 , (6.4)
, (6.4)
где  - количество уставок.
- количество уставок.
Суммарная длина информационных
символов для посылки с уставкой:
 (6.5)
(6.5)
Для защиты информации от помех
используется код с защитой на четности, где в результате кодирования
формируется один контрольный бит r=1.
Длина всего сигнала с КП на ПУ с
командой изменения уставки:
n=kск +kу+rу+ kкк
=8+7+1+8=24 (6.7)
Суммарная длина информационных
символов для посылки с ТИТ:
 (6.8)
(6.8)
Длина всего сигнала с КП на ПУ:
nТИТ=kск +kтит+rтит+ kкк
=8+16+1+8=33 (6.10)
Запрос ТИТ:
 (6.11)
(6.11)
nзТИТ=kск +kзтит+rзтит+ kкк
=8+7+1+8=24 (6.12)
Определим длительность одного бита
 (6.13)
(6.13)
Тогда частота передачи последовательного
интерфейса
 (6.14)
(6.14)
Принимаем стандартную скорость
передачи:
6.2 Выбор и
расчет линии связи
В настоящее время выделяют два класса линий
связи: проводные и беспроводные. Проводные лини связи по использованию
подразделяются на воздушные и кабельные. На воздушных линиях металлические
провода подвешиваются изоляторам, укрепленным на специальных опорах.
Используемый провод может быть стальным, медным или биметаллическим.
Для сооружения кабельных линий связи применяет
систему металлических проводов специальной конструкции. В зависимости от
конкретного назначения и вида использования кабели укладывают либо в земляные
траншеи, либо в специальную канализацию.
В качестве линии связи выберем линию из медных
проводов Поскольку этот кабель широко распространён для передачи сигналов.
Конструкция линии состоит из двух медных проводов. Рабочий диапазон для данного
типа линии 5 .. 150 кГц.
Характеристики линии:
Диаметр провода - 4мм.
Расстояние между проводами - 0,2 м
Затухание на частоте 96 кГц - 0,1 Дб/км.
Длина линии связи, указана в техническом
задании, равна l = 20 км,
поэтому затухание в данной линии составит:
 Дб.
Дб.
Вычислим во коэффициент
преобразования согласующего трансформатора с учетом понижения уровня сигнала
после прохождения через линию связи:
 Дб.
Дб.
Сследовательно:
Принимаем напряжение на входе демодулятора Uper=13В,
тогда напряжение на выходе модулятора будет Upr=Uper/1,3=13/1,3=10В.
7. СИСТЕМНЫЕ РАСЧЕТЫ
7.1 Расчет помехоустойчивости
Для передачи сообщений в проектируемой системе,
согласно техническому заданию, используются амплитудная манипуляция.
Напряжение сигнала Uс = 10В,
спектральная плотность мощности шума  Вт/Гц. Рассчитаем вероятность
искажения символа для симметричного канала.
Вт/Гц. Рассчитаем вероятность
искажения символа для симметричного канала.
 (7.1)
(7.1)
Следовательно 
Вероятность искажения элементарного
сигнала будет
 (7.2)
(7.2)
Для симметричного канала  , а
следовательно вероятность искажения элементарного сигнала будет
, а
следовательно вероятность искажения элементарного сигнала будет
 (7.3)
(7.3)
Для защиты от ошибок в системе
используется код с защитой на четность. Длина кодовой комбинации согласно
разделу 4 n=16.
Вероятность ошибочного приема составляет
 (7.4)
(7.4)
Вероятность правильного приёма:
Вероятность обнаруженной ошибки:
 (7.6)
(7.6)
Помехоустойчивость удовлетворяет требованиям ТЗ.
7.2 Спектр сигнала
линии связи
Выражение для расчета составляющих спектра ФМП
сигнала:
 (7.8)
(7.8)

Выражения для расчета спектра ФМП сигналы при  :
:
Подставим численные значение в (7.8):

Расчет частотных составляющих ФМП сигнала сведем
в таблицу 1.2.
Таблица 1.2 - Значения амплитуд и частот
гармонических составляющих ФМП сигнала
|
Составляющие
на частотах
|
Амплитуда,
В
|
Частота,
Гц
|
|

|
0
|
3000
|
|

|
2.5
|
3300
|
|

|
2.5
|
2700
|
|

|
0
|
3600
|
|

|
0
|
2400
|
|

|
0.85
|
3900
|
|

|
0.85
|
2100
|
Спектр ФМП сигнала представлен на рисунке 7.1
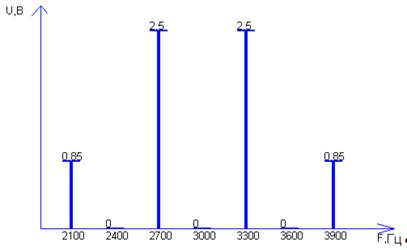
Рисунок 7.1- Спектр ФМП сигнала
7.3 Пропускная
способность канала
Пропускная способность для симметричного
дискретного канала телеизмерения рассчитывается по формуле 7.12
 (7.10)
(7.10)
Где  техническая скорость передачи
информации.
техническая скорость передачи
информации.
С=300*0,99=298 дв.ед./с
7.4 Расчет
надежности
Надежность - свойство изделия выполнять
определенные задачи в определенных условиях эксплуатации, т.е. надежность есть
внутреннее свойство изделия, включающее в свою очередь такие свойства, как
безотказность, долговечность, ремонтопригодность и сохраняемость.
В основе понятия надежности лежит понятие
отказа. Отказом называется событие, заключающееся в нарушении работоспособности
объекта.
В практических расчетах вероятностью безотказной
работы определяют по формуле:
 , (7. 11)
, (7. 11)
где t - заданное
время работы изделия.
 - интенсивность отказов системы
- интенсивность отказов системы
Произведем расчет количественных показателей
надежности спроектированной системы. Данные для расчета занесем в таблицу 7.1
Таблица 7.1
|
Тип
элемента
|
λ,
1/час
|
Кол-во,
шт
|
λi,
1/час
|
|
Транзисторы
|
8,00E-08
|
10
|
8,00E-07
|
|
Цифровые
интегральные микросхемы
|
2,50E-07
|
20
|
5,00E-06
|
|
Конденсаторы
керамические
|
8,00E-08
|
8,00E-07
|
|
Резисторы
постоянные компазиционные
|
5,00E-08
|
20
|
1,00E-06
|
|
Разъем
штепсельный
|
3,00E-09
|
2
|
6,00E-09
|
|
Кварцевые
резонаторы
|
5,00E-07
|
2
|
1,00E-06
|
|
Пайка
ручная
|
5,00E-10
|
500
|
2,50E-07
|
|
|
λсх=
|
8,86E-06
|
Наработка до отказа 
Вероятность безотказной работы при
времени работы системы, равном 10000ч., будет:
 (7.12)
(7.12)
Следовательно, вероятность отказа
составит
 (7.13)
(7.13)
8. РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
8.1 Программное
обеспечение ПУ
Программа для микроконтроллера 1 ПУH; вектор
прерываний INT0
H; НАЧАЛО ПРОГРАММЫ ИНДИКАЦИИ; разрешение
прерываний INT0; общее разрешение прерываний; очистка пользовательского флага
DISLPAY:MOVR2,
#70H
MOVR0, #10H:MOVA,
R0; копируем адрес в А
MOVP2, A, @R0, #64H, B, A.6.7, B,
#0AH, B.7.6, A.52.7
MOVA, B;
задержки для равномерности; свечения всех; разрядов; индикатора
NOP.7.5, A.4.7.7.4, DISPLAY0
:PUSHA, P1
JBGF0, INPUT0,
A; указатель на адрес индикатора; установка пользовательского флага;
восстанавливаем А; возврат из прерывания:MOV@R1, A; сохраняем значение
индикатора в памяти; сброс пользовательского флага; восстанавливаем А; возврат
из прерывания
_AP_ADRESS = ??H; константа - адрес АП
H; вектор прерываний INT0
BH; вектор прерываний таймера 0
H; НАЧАЛО ПРОГРАММЫ КП; очистка флага
пользователя
:SETBT1; разрешение приема; разрешение
прерываний от INT0; разрешение прерываний:MOVR2, #0AHSETBIDL; ожидание бита
(сохраняется в GF0)
JBGF0, SINHR2:DJNZR2, SINHR1
MOVR0, #01H; указатель на временный регистр КК
CLRA, #08H:SETBIDL, GF0, INPUT0@R0,
A, #02H@R0,
A, #O1H; указатель на КК, @R0; загрузка КК, #08H; счетчик битов КК:MOVR3, #03H;
счетчик единиц КК
DECODE1:RLCA, DECODE2,
DECODE0:DJNZR2, DECODE1MOVR0, 02H, @R1, #01H, DECODE4, #02H, SINHR0:CJNER3,
#02H, DECODE5, #03H, SINHR0:CJNEA, #00H, SINHR0:CLRT1, #01H, @R0, #11100000B,
#_AP_ADRESS, @R0, #00011000B, #00011000B, DESHFR1:CJNEA, #00010000B,
DESHFR2:CJNEA, #00001000B, SINHR0
:MOVR2, #0AH_SS:SETBGF1;
ожидание прерывания от таймера, TI0, #08H; счетчик КК
MOVA, @R0;
загрузка КК
TI_KK:RLCA
MOVGF1, C, TI1, #02H, @R0,
#06H_rKK:RLCA, TI2, #02H_rKK0:RLCA, C, TI_rKK0, #O1H, @RO, #00000111B, A:MOVA,
R4, A.3.4.4.4.4, P1.3, #08H:MOVR3, #03H:RLCA, C, CODE2, CODE0:DJNZR2,
CODE1:MOVR0, #02H, #01H, CODE4@R0, #10000000B:CJNER2, #02H, CODE5@R0,
#11000000B:MOV@RO, #00000000B, @R0, #02H:RLCA, A, CODE6, TI0
AJMPSINHR; возврат на прием следующего сообщения
LESS:MOVR0, #01H, @R0, #00000111B,
#10H, A, @R0, #00H, LESS0:DECA@R0, A, R0, R0, A.7.7
:MOVR0, #01H, @R0, #00000111B, #10H,
A, @R0, #01EH, MORE0:INCA@R0, A, R0, R00, A
SETBP0.7
CLRP0.7
AJMPKTRM
8.2 Программное
обеспечение КП
org 0hN0Bh
00H
JMP
M0
ORG03H;
формирование вектора
JMP
INT; внешнего
прерывания
ORG 06H;
основная программа:MOVP1, A; подпрограмма обработки прерывания, P1; ввод
данных@R0, A; из А в ячейку BПД
DECODE0:MOVR3, #03H:RRCA, DECODE2,
DECODE0:DJNZR2, DECODE2:MOVR0, #O4H, @R1, #01H, DECODE5, #02H, ERROR_TI:CJNER3,
#02H, DECODE6, #03H, ERROR_TI:CJNEA, #00H, ERROR_TI_TI:ACALLERROR, SINHR:MOVR0,
#03H, @R0@R1, A, R1, A.7.7, @R1, A, #10H:NOP, DISPLAY0.7.7, INPUT:MOVR0, #01H,
@R0, #00100000B@R0, A, R1, #08H, A, NEXT_KP
:CLRT0
CLREX0; запрещение прерываний от INT0, #01H;
временный регистр КК
MOVA, #21H@R0, A, #10H, #38H:MOVR7,
#05H, R1, #38H, A, @R1, @R0, MORE, #01H, @R0, #10H@R0, A:MOVR0, #01H, @R0,
#09H@R0, A_KC_KK_r_KC_KK_r, TP0
_TI:PUSHA, R0.6, P2.6, A,
#00000111B, #10H, R0, #00111000B, A, R0; адрес
рег-ра,
A, P0@R0, A, A
:MOVTL0, #08FH, #0FDH, #01H
:MOVTL0, #84H, #6DH
SETBEA; разрешение прерываний; разрешение
прерываний от таймера 0, #01H; 01 - режим работы таймера; запуск таймера
RET
В данном курсовом проекте была спроектирована
система телерегулирования. Разработанная система может использовать на многих
производственных объектах, без существенных изменений.
Основной частью схемы контролируемого пункта и
пункта управления является микроконтроллер. Благодаря которому упрощается схема
системы. А также сокращается время на настройку и наладку системы, что
немаловажно в настоящее время.
Также следуют отметить, что возможна доработка и
усовершенствование системы. В частности использование в качестве пульта
диспетчера и средства отображения информации ПЭВМ. Что даст более гибкие
возможности для использования системы. Организация архивации получаемых данных
с контролируемых пунктов, настройка прав на выполнение различных функций
обслуживающему персоналу объектов.
В целом система телемеханики отвечает всем
требованиям, предъявленным в техническом задании к проекту.
Литература
1. Сорока Н.И., Кривинченко Г.А.
Телемеханика: конспект лекций. Ч.1: Сообщения и сигналы. Мн.: БГУИР, 2000. -
126 с.
. Сорока Н.И., Кривинченко Г.А.
Телемеханика: конспект лекций. Ч.2: Коды и кодирование. Мн.: БГУИР, 2001. - 168
с.
. Сорока Н.И., Кривинченко Г.А.
Телемеханика: конспект лекций. Ч.3: Линии связи и помехоустойчивость
информации. Мн.: БГУИР, 2004. - 130 с.
. Сорока Н.И., Кривинченко Г.А.
Телемеханика: конспект лекций. Ч.4: Системы телемеханики. Мн.: БГУИР, 2005. -
154 с.
. Сорока Н.И., Кривинченко Г.А.
Телемеханика: конспект лекций. Ч.5: Технологии передачи дискретной информации.
Электронный вариант.
. Богданович М.Ню и др.Цифровые
интегральные микросхемы: Справочник. Мн.: Беларусь, 1991.492с.
. Сташин В.В., Урусов Ф.В.,
Мологонцева О.Ф.. Проектирование цифровых устройств на однокристальных
микроконтроллерах. - М.: Энерга-атомиздат, 1990.
8. Сопряжение ПК с внешними
устройствами: Пер. с англ. -М.: ДМК Пресс 2001. - 320 с.: ил.