Динамика электроподвижного состава
Министерство транспорта Российской
Федерации
Федеральное агентство
железнодорожного транспорта.
Федеральное государственное бюджетное
образовательное учреждение высшего профессионально образования
САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПУТЕЙ СООБЩЕНИЯ
Кафедра: «Электрический
железнодорожный транспорт»
КУРСОВАЯ РАБОТА
На тему: «Динамика электроподвижного
состава»
Вариант 36
Выполнил:
студент гр 401
Костина К.Е.
Проверил: ст.
преподаватель
Лукин Н.Ф.
Самара 2012
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
ЗАДАНИЕ И ИСХОДНЫЕ ДАННЫЕ
. ПОСТРОЕНИЕ РАСЧЕТНОЙ СХЕМЫ
. ВЕРТИКАЛЬНАЯ СТАТИЧЕСКАЯ НАГРУЗКА
. ИЗМЕНЕНИЕ НАГРУЗОК ПРИ РАБОТЕ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ
. ОПРОКИДЫВАЮЩИЙ МОМЕНТ ОТ ДЕЙСТВИЯ ЦЕНТРОБЕЖНОЙ СИЛЫ
. СИЛЫ ДЕЙСТВУЮЩИЕ НА ТЕЛЕЖКУ ПРИ ДВИЖЕНИИ В КРИВОЙ
. БОКОВОЕ УСИЛИЕ МЕЖДУ КОЛЕСОМ И РЕЛЬСОМ В КРИВОЙ
. ОЦЕНКА БЕЗОПАСНОСТИ ДВИЖЕНИЯ ЭКИПАЖА В КРИВОЙ ПО ВЕЛИЧИНЕ
БОКОВОЙ СИЛЫ
. ОЦЕНКА УСЛОВИЙ КОМФОРТА ПО ПОПЕРЕЧНЫМ УСКОРЕНИЯМ
. ОЦЕНКА УСЛОВИЙ КОМФОРТА ПО ВЕРТИКАЛЬНЫМ КОЛЕБАНИЯМ В
УСЛОВИЯХ ДИНАМИЧЕСКИХ НАГРУЗОК
ПРИЛОЖЕНИЯ
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
ВВЕДЕНИЕ
Данная курсовая работа по дисциплине «Динамика электроподвижного состава»
посвящена оценке безопасности движения экипажа в кривой и условий комфорта
работы локомотивной бригады и перевозки пассажиров.
Объектом расчетов является унифицированная тележка электропоезда ЭД4М,
чертеж которой приведен в приложении. Безопасность обеспечивается в том случае,
если система действующих на экипаж сил не нарушает устойчивости движения и не
ведет к высоким напряжениям и деформациям в конструкциях экипажа и пути. Для
четкого представления системы действующих сил и упрощения расчетов, а также для
более детального ознакомления с тележкой необходимо составить расчетную
схему рамы тележки и определить величину статических и динамических нагрузок
от оси колесных пар на рельсы, от собственного веса рамы, тяговых двигателей,
кузова и неподрессоренных частей, провести анализ жесткости систем центрального
и буксового рессорного подвешивания в условиях динамического нагружения. Затем
рассчитываются центробежные силы и реакции при движении экипажа в кривой. После
определения по результатам предыдущих пунктов суммарных нагрузок от колес на
рельсы, необходимо будет оценить, как обеспечиваются условия безопасности и
условия комфорта по величине поперечного ускорения. Далее, после определения
жесткости систем центрального и буксового рессорного подвешивания необходимо
оценить обеспечение условий комфорта элементами этих систем по вертикальным
колебаниям при заданных исходных данных движения рассматриваемого
электропоезда.
Задание и исходные данные
Определить действующие статические и динамические нагрузки на раму
унифицированной тележки моторного вагона электропоезда ЭД4М (Приложение 1),
произвести оценку безопасности движения экипажа в кривой и условия комфорта.
Вариант исходных данных
|
Радиус кривой
|
ρ=200 м
|
|
Возвышение наружного рельса
|
h=0,15 м
|
|
Скорость
|
V=60 км/ч
|
|
Сила тяги
|
Fк=67 кН
|
|
Масса кузова
|
mк=46 т
|
|
Контрольное условие безопасности по УБ
|
№ 1
|
Общие исходные данные
|
Диаметр бандажей колесной пары
|
Дб=1,05 м
|
|
Расстояние между кругами катания колес
|
2S=1,6 м
|
|
Коэффициент трения скольжения колес относительно рельсов
|
f=0.25
|
|
Высота центра масс кузова над уровнем осей колесной пары
|
hск=1,6 м
|
|
Высота центра тяжести подрессоренных масс тележки над уровнем
осей колесной пары
|
hст=0,15 м
|
|
Масса неподрессоренных частей в расчете на одну колесную
пару
|
mнп=2,25 т
|
|
Масса рамы тележки
|
mр=4 т
|
|
Масса тягового двигателя
|
mд=2,2 т
|
1.
Построение расчетной схемы
Расчетная схема строится для проведения расчетов на основании чертежа. В
расчетной схеме элементы рамы заменяются стержнями, оси которых проходят через
центры тяжести поперечных сечений этих элементов. Все стержни принимаются
лежащими в одной плоскости. Кронштейны крепления представлены Г-образными
консолями в местах установки пружин буксового рессорного подвешивания. Нагрузки
от подвески передаются на консольные балки, закрепленные на шкворневой балке.
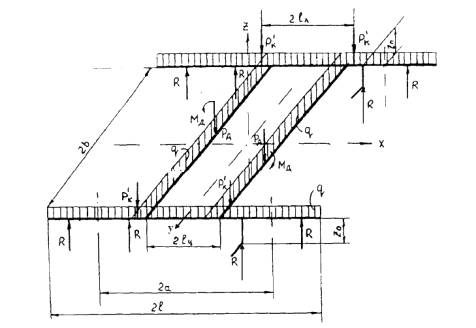
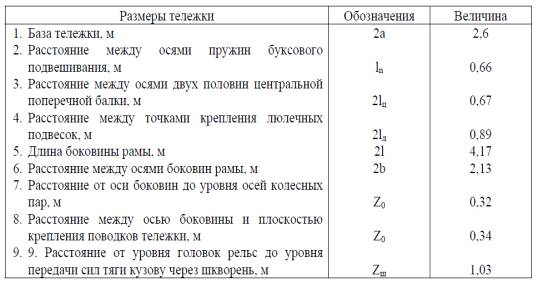
Рисунок 1.1 - Расчетная схема
Размер тележки ы тележки
2.Вертикальная статическая нагрузка
Рама тележки находится под действием собственного веса элементов рамы с
закрепленными на них кронштейнами и деталями ТРП: веса кузова и элементы
центрального подвешивания; веса и крутящего момента от консольно-закрепленных
тяговых электродвигателей; реакций рессорных подвесок.
Нагрузка от оси колесной пары на рельс определяется по формуле:
 ; (2.1)
; (2.1)
где g=9,81м/сек2;
 - масса вагона в расчете на одну колесную пару.
- масса вагона в расчете на одну колесную пару.
 кН
кН
Масса вагона определяется по сумме масс отдельных частей:
mв=mк+4mнп+4mд+2mр
; (2.2)
где mк - масса кузова;нп - масса неподрессореных
частей в расчете на одну колесную пару;д - масса ТЭД ;р - масса рамы тележки.
mв=46+4*2,25+4*2,2+2*4=71,8 (т)
Реакции рессор определяются по формуле:
Пст-mнп*g=4R ; (2.3)
,91-2,25*9,81=4R
.465=R кН
3. Изменение нагрузок при работе ТЭД
При работе тяговых двигателей силы тяги, реализуемые колесными парами,
передаются через буксы на боковины рамы тележек. С боковины через центральную
поперечную балку тяговое усилие передается на надрессорную балку, а с нее через
шкворень на шкворневую балку кузова.

Рисунок 3.1 - Схема сил нажатия колесной пары на рельсы.
Величина касательной силы тяги одной кп - ТЭД определяется по формуле:
 16,75 кН
16,75 кН
Момент сопротивления кузова определяется по формуле:
Мт=Мк=Fтк1*zш;
где Fтк1 - сила тяги на 1 тележку вагона.
Момент Мт уравновешивается реактивными моментами МR пар сил 2Rт в точках опоры тележки на рельс. Нагрузка каждого переднего
колеса уменьшается, а каждого заднего увеличивается на величину Rт.
Уравнение равенства моментов определяется по формуле:
тк1*zш=2Rт*2а; (3.2)
Где Rт - тяговая реакция колеса.
,75*2*1,03=2Rт*2,6 => Rт=6,635 кН
. Опрокидывающий момент от
действия центробежной силы
При движении экипажа в кривой на него действуют распределенные по всей
массе центробежные силы, которые заменяются равнодействующей , направленной в
сторону наружного рельса.

Рисунок 4.1 - Схема действия сил на экипаж при движении в кривой
Центростремительное ускорение определяется по формуле:

Центробежная сила на одной тележке определяется по формуле:

При возвышении наружного рельса центробежная сила частично компенсируется
составляющей силы тяжести.


При этом такое же по величине значение центробежной силы в кривой с
возвышением Св достигается при большей скорости движения:
Cв=С-С’; (4.4)
Cв=49.54-35.18=14,35кН
Опрокидывающий момент от силы Cв:
Моп=Св*hс; (4.5)
Моп=15,61*1,585=24,74 кН м


Считается, что безопасность движения обеспечивается, если опрокидывающий
момент нее превышает восстанавливающего момента от силы тяжести на плече S с коэффициентом запаса равным 2

Максимально допустимое по устойчивости от опрокидывания
центростремительное ускорение:

В кривой без возвышения

Центробежная сила уравновешивается суммой поперечных реакций рельса.
Момент этой пары уравновешен моментом реакций на правых и левых колесах
тележки.


 кН
кН
Допустимые по опрокидыванию скорости движения в кривой:



Вывод: По результатам проведенных расчетов определили, что условие
безопасности при движении в кривой выполняется, опрокидывающий момент не
превышает восстанавливающего момента и заданная скорость не превышает
расчетные.
. Силы, действующие на тележку при
движении в кривой
При входе в кривую на переднее наружное колесо со стороны наружного
рельса начинает действовать направляющее усилие У1, которое
понуждает экипаж двигаться по окружности вокруг центра кривой.
Угловая скорость скорость находится по формуле:
Где p -
радиус вращения

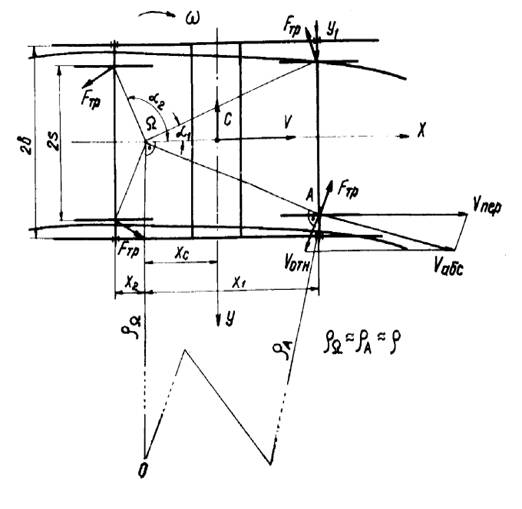
Рисунок 5.1- Схема действия сил на тележку при движении в кривой.
Величина и направление абсолютных скоростей различна, поэтому удобно
представить абсолютную скорость каждой точки как сумму переносной и
относительной скоростей.
Абсолютная скорость любой точки тележки:


Относительная скорость любой точки тележки:


Скорость движения в кривой с возвышением:


Полюсное расстояние:


При промежуточной установке тележки ее равновесие под действием
рассмотренных систем сил выражается двумя уравнениями, а именно: уравнением
суммы проекций всех сил на поперечную ось и уравнением моментов относительно полюса.

Таблица 5.1
Решение системы уравнений
|
Расчетная величина, ед.изм.
|
Значение над заданного хс
|
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
|
хс
|
0
|
0,8
|
1,3
|
1,6
|
1,8
|
1,9
|
|
х1=хс+а
|
1,3
|
2,1
|
2,6
|
2,9
|
3,1
|
3,91
|
|

|
1,5
|
2,2
|
2,7
|
3,008
|
3,2
|
3,9
|
|

|
0,85
|
0,93
|
0,95
|
0,96
|
0,968
|
0,97
|
|
х2=хс-а
|
-1,3
|
-0,5
|
0
|
0,3
|
0,5
|
1,31
|
|

|
1,52
|
0,94
|
0,8
|
0,85
|
0,94
|
1,53
|
|

|
-0,86
|
-0,53
|
0
|
0,35
|
0,53
|
0,85
|
|

|
0
|
0,4
|
0,95
|
1,31
|
1,49
|
1,82
|
|

|
0
|
0,32
|
1,235
|
2,09
|
2,68
|
4,75
|
|

|
3,04
|
3,18
|
3,52
|
3,85
|
4,14
|
5,52
|
|

|
3,04
|
2,86
|
2,28
|
1,75
|
1,45
|
0,77
|
|

|
102,8
|
96,72
|
77,10
|
59,18
|
49,03
|
26,04
|
|

|
0
|
17,59
|
41,77
|
57,6
|
65,51
|
80,02
|
|

|
102,83
|
79,13
|
35,33
|
1,58
|
-16,4
|
-53,9
|
|
Cв=С-С’
|
67,64
|
43,94
|
0,148
|
-33,6
|
-51,6
|
-89,1
|
|

|
50,7
|
39,07
|
17,44
|
0,78
|
-8,13
|
-26,6
|
|

|
25,06
|
19,29
|
8,611
|
0,38
|
-4,01
|
-13,1
|
|
|
85,96
|
75,4
|
50,38
|
10,65
|
----
|
----
|
|

|
86,02
|
75,48
|
50,49
|
11,15
|
----
|
----
|
|

|
29,27
|
29,30
|
24,80
|
21,06
|
19,08
|
14,63
|
|

|
23,81
|
24,71
|
22,70
|
20,96
|
20,07
|
17,90
|
|
Убок кН
|
73,56
|
67,42
|
52,3
|
38,12
|
29,95
|
11,41
|
|
Убок В кН
|
79,02
|
72,01
|
54,4
|
38,22
|
28,96
|
8,14
|
|
а м/с2
|
5,73
|
4,41
|
1,96
|
0,088
|
-0,09
|
-3,01
|
|
ав м/с2
|
3,77
|
2,45
|
0,008
|
-1,87
|
-2,88
|
-4,97
|
График зависимостей Y1
, (V), Xc (V). C(V) представлен в Приложении 2.
Вывод: при движении в кривой возникает дополнительная сила У1
стремящаяся повернуть тележку вокруг оси, путем усилия на колесные пары.
. Боковое усилие между колесом и
рельсом в кривой
Нагрузки от колеса на рельсы при движении в кривой изменяются.
Соответственно изменяются и силы трения.
Нагрузка на направляющем колесе:
П1=87,95+50,77-0,96 =137,76 кН
П2=87,95+39,07-0,96 =126,06 кН
П3=87,95+17,44-0,96 =104,43 кН
П4=87,95+0,78-0,96 =87,77 кН
П5=87,95-8,13-0,96 =78,86 кН
П6=87,97-26,65-0,96 =60,34 кН
Силы трения без возвышения :




 21,06
21,06


Аналогично рассчитываю и силу трения с возвышением
П1в=87,9+25,06-0,96 =112,05кН
П2в=87,9+19,29-0,96 =106,28 кН
П3в=87,9+8,661-0,96 =95,60кН
П4в=87,9+0,38-0,96 =87,37кН
П5в=87,9-4,014-0,96 =82,97кН
П6в=87,9-13,15-0,96 =73,84кН






Суммарное боковое воздействие между рельсом и первым направляющим
колесом:
Убок=У1-Fутр1; (6.3)
График зависимости Yбок(V) и Yбок
в (V)в представлен в
Приложении 3.
Вывод: С ростом скорости воздействие между колесом и рельсом возрастает.
7. Оценка безопасности движения экипажа в кривой
по величине боковой силы
Рисунок 7.1 - Схема действия сил в точке контакта колеса с рельсом.
колесный пара сила опрокидывающий
Под действием вертикальной нагрузки П колесо соскальзывает вниз. Но
вследствие прижатия колеса к рельсу силой N в точке контакта действует сила трения, препятствующая этому
движению.
=Nf; (7.1)
Уравнения безопасности по вертикальной составляющей:












Уравнения безопасности по горизонтальной составляющей:



Условия безопасности:
. Убок ≤ 0,69 Пст
2. Убок ≤100 кН
. Убок ≤45 кН
Вывод: В ходе проведенных расчетов установлено ,что условия безопасности
выполняются до скорости:
1.V=61,4 км/ч Vв=72,2 км/ч
.V=112,9 км/ч Vв=118,8 км/ч
.V=18,6 км/ч Vв=41,6 км/ч
8. Оценка условий комфорта по поперечным
ускорениям
Движение экипажа с высокими скоростями сопровождается колебаниями,
которые отрицательно влияют на пассажиров и бригаду. При движении в кривой
добавляется длительное действие поперечного ускорения.
Центробежная сила, действующая на пассажиров в кривой, нарушает
равновесие силы тяжести и нормальной реакции пола и сидения. Необходимо искать
дополнительную опору, дополнительное напряжение мышц и реакции вестибулярного
аппарата на поперечное ускорение вызывают неприятное ощущение у человека.
По условию воздействия величина поперечного ускорения не должна превышать
:
a≤[amax]=0,7м\с2













График зависимости а(V) и ав(V)в представлен в
Приложении 4.
Вывод: Условия комфорта для пассажиров и локомотивной бригады
удовлетворяют условиям до скорости: V=61 км\ч;Vв=72 км\ч.
9. Оценка условий комфорта по вертикальным
колебаниям в условиях динамического колебания
Анализ жесткости пружин центрального подвешивания
При движении экипажа вследствие наличия пружин и неровностей пути у рамы
тележки и кузова возникают вертикальные колебания, имеющие периодический
характер. В общем случае их вектор направленности, периодичность и амплитуды
описываются сложными диф. Уравнениями
Наличие пружин в системах подвески электроподвижного состава вызывает при
движении колебательный процесс. Особенно опасно это воздействие на высоких
скоростях.
Статический вертикальный прогиб рессорного подвешивания:

При v
=1,5 Гц

При v=2,5 Гц
Коэффициент вертикальной динамики:

При v =1,5 Гц, V=60 км/ч:

При v =1,5 Гц, V=120 км/ч:

При v =2,5 Гц, V=60 км/ч:

При v =2,5 Гц, V=120 км/ч:

Динамическая нагрузка на рессорное подвешивание:

При v =1,5 Гц, V=60 км/ч:

При v =1,5 Гц, V=120 км/ч:

При v =2,5 Гц, V=60 км/ч:

При v =2,5 Гц, V=120 км/ч:

Статическая жесткость одной винтовой пружины:
При P=476Н/м:

Жсд= =11900Н/м
=11900Н/м
При Р =500,9Н/м:

Жсд= =12522Н/м
=12522Н/м
При Р = 519Н/м:

Жсд= = 12975Н/м
= 12975Н/м
При Р =586Н/м:
Жсд= =14650Н/м
=14650Н/м
Статическая жесткость одной цилиндрической винтовой пружины:
При Dн =0,308 м, dн=0,04, n0=5 витков

При Dн =0,21 м, dн=0,03, n0=8 витков

При Dн =0,14 м, dн=0,02, n0=12 витков

Жстат.пр СУММА =(58+145,7+58)*8=2093кН
Динамическая жесткость одной винтовой пружины:

При V=60 км/ч,k=1,03

При V=120 км/ч,k=1,05

Частота колебания:
Вывод: сравнивая Жсумма ст .и Жд.пр можно сказать,
что они лишь немного отличаются по значению; частота, полученная по расчетам,
не является опасной для жизни.
Анализ жесткости пружин буксового подвешивания
Система буксового подвешивания имеет ряд из восьми пар винтовых пружин и
четырех ГГП, сопротивление которых не зависит от действующих на них сил. При
этом анализ жесткости буксового рессорного подвешивания можно произвести на
одной колесной паре.
Статическая жесткость пружин:
При Dн=0,206, dн=0,035, no=4

При Dн=0,165, dн=0,02, no=7

Статическая жесткость комплекта пружин с фрикционными гасителями
колебаний:

где Жкп.ст - статическая жесткость пружин,
кд,, - коэффициент вертикальной динамики:


Рстат=175,91-2,25*9,81=153,8
Рдин=153,8+153,8*0,25=193,8
µ=F/Рст =5/153.8=0,03



Статический вертикальный прогиб буксового подвешивания:


Частота колебания груза при демпфировании фрикционным гасителем:


Диаграмма нагружения буксового рессорного подвешивания представлена в
Приложении 5.
Вывод: В ходе расчетов установлено что частота колебаний, не превышает
уровень комфорта пассажиров, а значит данная буксовая система подходит для
использования в электропоездах.
Заключение
По результатам проведенных расчетов определили, что условие безопасности
при движении в кривой выполняется, опрокидывающий момент не превышает
восстанавливающего момента и заданная скорость не превышает расчетные; при
движении в кривой возникает дополнительная сила У1 стремящаяся
повернуть тележку вокруг оси, путем усилия на колесные пары; условия
безопасности выполняются до скорости:
1.V=61,4 км/ч Vв=72,2 км/ч
.V=112,9 км/ч Vв=118,8 км/ч
.V=18,6 км/ч Vв=41,6 км/ч
Условия комфорта для пассажиров и локомотивной бригады удовлетворяют
условиям до скорости: V=61
км\ч;Vв=72 км\ч. В итоге установлено , что данное рессорное
подвешивание пригодно для установки на моторвагонные поезда ЭД-4М.
Приложение 1
Рисунок А1 - Тележка моторного вагона электропоезда ЭД4М:
- рама; 2 - гидравлический гаситель колебаний; 3 - фрикционный гаситель
колебаний; 4 - узел буксового рессорного подвешивания; 5 - узел центрального
рессорного подвешивания; 6 - буксовый поводок; 7 - тяговый редуктор; 8 -
упругая муфта; 9 - тяговый электродвигатель; 10 - поводок тележки; 11 - боковой
скользун; 12 - рычажно-тормозная передача; 13 -шкворневой брус
БИБЛИОГРАФИЧЕСКИЙ
СПИСОК
1.Добровольская
Э.М. Электропоезда постоянного и переменного тока/ Э.М. Добровольская. - М.:
Академкнига, 2004. - 359 с.
.Просвирин
Б.К.Электропоезда постоянного тока: учеб. Пособ./ Б.К. Просвирин ;
утв.Департаментом кадров и учеб. Завед. МПС Росии. - М.: УМК МПС Росии, 2001, -
669с.
.Механическая
часть подвижного состава /под ред.И.В. Бирюкова. _ М.: Транспорт, 1992. 265с.
.Вершинский
С.В., Динамика вагона: учебник для ж.д. вузов / под.ред. Вершинского С.В. -М.:
Транспорт, 1991, - 60с.
.Методические
указания к выполнению курсовой работы по дисциплине «Динамика электроподвижного
состава» для студентов специальности 190303 «Электрический транспорт железных
дорог». - Самара: СамГАПС, 2010. - 28с.