Метеорологические радиолокационные станции
Введение
В данной курсовой работе я провожу анализ и сравнение
различных современных метеорологических радиолокационных станций,
разработанных, а также производимых отечественными и зарубежными фирмами.
Основными производителями метеорологических РЛС являются: «Selex sistemi
integrati GmbH»; «Enterprise electronics corporation»,» Viasala». В современной
метеорологии МРЛ пользуются большим успехом, как инструмент исследования
атмосферных и метеорологических явлений. Данные, полученные с помощью МРЛ с
успехом используют потребители, в первую очередь авиация, а также морской и
различные виды наземного транспорта. Современные МРЛ необходимы также в
вооруженных силах различных стран мира.
1. Автоматизированный метеорологический
радиолокационный комплекс «Метеоячейка»
Автоматизированный метеорологический радиолокационный
комплекс (АМРК) «Метеоячейка» предназначен для автоматизации метеорологического
радиолокатора МРЛ-5 с целью обеспечения аэропортов и автоматизированных систем
управления воздушным движением информацией об облачности и связанных с ней
опасных явлениях погоды (сильные ливни, грозы, град, шквал) с высокой
надежностью и оперативностью в наиболее удобном для потребителя виде. АМРК
имеет повышенную помехозащищенность и позволяет эксплуатировать МРЛ в условиях
аэропорта при дистанционном режиме управления с использованием обычных
кроссовых линий связи. Многолетний опыт эксплуатации сети АМРК в различных
физико-географических условиях показал высокую надежность работы комплекса и
высокое качество получаемой информации при обеспечении различных потребителей,
и в первую очередь авиации.
1.1 Состав
Автоматизированный метеорологический радиолокационный
комплекс «Метеоячейка» состоит из двухволнового радиолокатоpa МРЛ-5 и средств
автоматизации получения, обработки и пере дачи радиолокационной информации. В
состав оборудования АМРК «Метеоячейка» входят: метеорологический радиолокатор
МРЛ-5, комплект технических средств автоматизации получения формации,
центральная система АМРК (ЦС), специализированные рабочие станции потребителей
информации. АМРК является пространственно распределенной системой управления
МРЛ. Центральная система по команде оператора при работе в штатном режиме или
по таймеру при работе в автоматическом режиме формирует комплексные управляющие
команды, которые по каналу связи передаются в устройство предварительной
обработки сигналов дистанционное (УПО-ДМ). УПО-ДМ устанавливается в аппаратной
кабине МРЛ. УПО-ДМ является специализированной ЭВМ, непосредственно управляющей
МРЛ и выполняющей всю предварительную обработку и сжатие информации.
По окончании сеанса наблюдений полученные данные передаются в
центральную систему, где выполняется их анализ, архивация, визуализация и
передача потребителям.
В процессе работы АМРК производит постоянный контроль всех
устройств, входящих в его состав, и при необходимости формирует предупреждающие
сообщения для оператора. Такое распределение функций управления и обработки
данных позволяет размещать центральную систему АМРК на любом удалении от МРЛ.
Как показала практика, такой распределенный вариант установки является типовым.
Единственное требование - обеспечение скорости обмена по линии связи не ниже
4800 бит/с. Таким образом, при наличии обычной телефонной линии связи оператор
может управлять МРЛ, который удален от него на десятки или сотни километров так
же, как и при размещении центральной системы в здании МРЛ.
Специальное программное обеспечение АМРК «Метеоячейка»
реализовано в виде комплекта 32-разрядных приложений, работающих под
управлением ОС Windows ХР Pro в локальной вы числительной сети (ЛВС). Рабочие станции могут
работать также в среде Windows 95/98/2000/NT 4.0.
1.2 Устройство предварительной обработки
Устройство предварительной обработки сигналов (УПО-ДМ),
«являющееся составной частью АМРК «Метеоячейка», обеспечивает выполнение
следующих функций: дистанционное управление и контроль МРЛ-5 по телефонной
линии связи; регистрацию, обработку и накопление данных, поступающих из
приемников I и II каналов МРЛ-5; передачу накопленной информации по линии связи
в центральную систему; диагностику всех устройств, входящих в состав УПО-ДМ.
Конструктивно УПО-ДМ состоит из кабинета-стойки стандарта 19
дюймов, основной и резервной секций обработки на базе высоконадежных
промышленных ЭВМ, оптопанели для защиты ОТ молниевых разрядов, устройства
коммутации сигналов и комплекта модемов.
1.3 Центральная система АМРК
Основной задачей центральной системы является управление
работой МРЛ, анализ и интерпретация полученных результатов измерений и передача
данных потребителям в необходимом объеме.
Программное обеспечение центральной системы выполнено на базе
Windows ХР Pro.
Комплект технических средств центральной системы включает в
себя основную и резервную ПЭВМ, устройство бесперебойного питания, коммутатор
каналов, модемную стойку и коммуникационную секцию с защитой от молниевых
разрядов, которые размещаются в кабинете-стойке стандарта 19 дюймов.
1.4 Специализированные рабочие станции
В состав АМРК может входить различный набор
специализированных рабочих станций. Конкретная конфигурация определяется
заказчиком. Передача данных от центральной системы на рабочие станции может
выполняться по локальной вычислительной сети или по телефонным каналам связи.
Рабочие станции отличаются друг от друга объемом и формой представления информации.
В настоящее время на сети АМРК работают: следующие специализированные рабочие
станции: синоптика-консультанта летного состава, синоптика-консультанта
диспетчерского состава (синоптика РЦ), синоптика-прогнозиста АМСГ (АМЦ),
синоптика-прогнозиста ЦГМС, руководителя полетов АС УВД, техника-метеоролога
АМСГ, оперативного дежурного МЧС.
При большом числе рабочих станций передача данных выполняется
через связной сервер «МетеоТелекс». Специальное программное обеспечение
связного сервера АМРК позволяет одновременно работать с 18 каналами связи,
включая скоростные каналы с протоколом TCP/IP-socket.
В состав АМРК может входить различный набор
специализированных рабочих станций. Конкретная конфигурация определяется
заказчиком. Передача данных от центральной системы на рабочие станции может
выполняться по локальной вычислительной сети или по телефонным каналам связи.
Рабочие станции отличаются друг от друга объемом и формой представления
информации.
2. Обзорный доплеровский метеорологический
радиолокатор WSR-88D NEXRAD
WSR-88D-S (weather surveillance radar - 1988 Doppler) с длиной волны 10,7 см
(полоса S)
является основным радиолокатором оперативной сети, созданной по национальной
программе США NEXRAD. Он поставлялся в оперативную сеть NEXRAD с 1991 г.
В отличие от других МРЛ, разработанных до 1988 г., WSR-88D предназначен для
наблюдений и при ясном (безоблачном) небе. Таким образом, его по праву можно
назвать первым всепогодным МРЛ.
Энергетические параметры WSR-88D его разработчики
определяли исходя из требований регистрации отраженных сигналов от ясного неба
в ближней зоне от радиолокатора в пределах пограничного слоя.
В WSR-88D для зондирования ясного неба используется зондирующий импульс
длительностью 4,5 мкс. Такая длительность наряду с сужением полосы приемника
обеспечивает энергетический выигрыш порядка 10 дБ, а с учетом длительного
когерентного накопления в процессе медленного сканирования антенны суммарный
выигрыш составляет 20-25 дБ по сравнению с основным режимом работы WSR-88D.
Отражение СВЧ излучения в обратном
направлении происходит на турбулентных неоднородностях показателя преломления
воздуха с пространственным масштабом, равным половине длины волны излучения.
Если половина длины волны излучения меньше внутреннего масштаба турбулентности,
то обратного рассеяния на этой длине волны практически не происходит. Таким
образом, для объяснения отражений от ясного неба привлекается известный в
оптике принцип Вульфа-Брэгга (принцип дифракционной решетки). Отражаемость зон сильной
турбулентности ясного неба по порядку соответствует отражаемости слаборазвитых
облаков без осадков.
Однако опыт практического применения
WSR-88D показал, что в теплый сезон в чистом воздухе доминирует рассеяние,
обусловленное насекомыми, переносимыми ветром. В этих ситуациях отраженный
сигнал находится в диапазоне от 5 до 20 дБ, а иногда в линиях конвергенции
превышает 30 дБ. Для дневного времени и температуры воздуха выше 10 °С, при
которой начинается активность насекомых, отраженный сигнал от ясного неба можно
использовать для оценки ветра. Векторы ветра получаются примерно через каждые 7
км.
2.1 Структура WSR-88D
D (рис. 1.1) состоит из трех
основных составных частей: метеорологической радиолокационной станции (MPJIC =
RDA, radar data acquisition), командно-диспетчерского пункта (КДП = PRD, radar
product generation) и абонентских пунктов удаленных пользователей (АПУП = UDS,
user display system).
В свою очередь, в состав MPJIC входят
антенно-волноводная система, приемопередатчик, а также аппаратура первичной
обработки радиолокационной информации. MPJIC является полностью
автоматизированной необслуживаемой составной частью комплекса и управляется
дистанционно с КДП. Антенна с радиопрозрачным укрытием может монтироваться на
вышке, башне или крыше здания, приемопередатчик с аппаратурой первичной
обработки размещается в специальном контейнере, который может
транспортироваться и перемещаться на открытой местности вне помещения. КДП
MPJIC размещается в здании и соединяется с MPJIC высокоскоростной линией связи,
в качестве которой может быть использован высокочастотный кабель,
оптоволоконная или радиорелейная линия. Основной составной частью КДП является
ЭВМ, в функции которой входят управление радиолокатором и тестирование работы
комплекса, прием и вторичная обработка радиолокационной информации,
представление результатов обработки на цветных индикаторах, архивация и
передача информации удаленным пользователям.
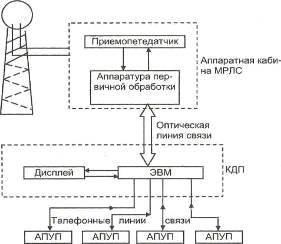
Рисунок 1.1 - Функциональная схема WSR-88D
Удаленные пользователи, оснащенные персональными компьютерами,
могут получать интересующую их информацию в интерактивном режиме с КДП по
телефонной линии связи. Режим работы и схемы обработки. Дальность действия
WSR-88D в режиме измерения радиолокационной отражаемости составляет 460 км,
хотя термин «измерение» на таких удалениях, когда пространственное разрешение
составляет 8 км, а интервал высот до 16 км находится в зоне геометрической тени
за счет кривизны Земли, не вполне соответствует действительности. Более
правильно было бы говорить об обнаружении очень мощных гроз. О количественных
измерениях можно говорить в диапазоне дальности 345 км. Дальность действия в
режиме измерения скорости составляет 230 км.
Аппаратура первичной обработки (АЛО) RDA обеспечивает
обработку сигнала в следующих трех режимах радиолокационного обзора:
) в режиме измерения отражаемости при быстром темпе обзора
пространства;
) в режиме измерения отражаемости, средней доплеровской
скорости и ширины спектра при умеренном темпе обзора;
) в режиме измерения отражаемости, средней скорости и ширины
спектра при медленном темпе обзора (- 0,1…0,2 об/мин) для работы по слабым
сигналам от гидрометеоров и ясного неба. Во всех трех случаях может происходить
как азимутальное, так и угломестное сканирование антенным лучом с
вышеуказанными скоростями. АПО предназначена для оценки радиолокационной
отражаемости Z, средней доплеровской скорости ор и среднеквадратической ширины
доплеровского спектра скоростей a в сферической системе координат с разрешением
250 м х 1° в темпе поступления информации. Измерение отражаемости происходит в
интервале дальности до 460 км с разрешением по лучу 0,25 км; таким образом,
число обрабатываемых элементов дальности по лучу при измерении отражаемости
составляет 1840. В АПО RDA обеспечивается расчет отношения сигнал/шум, устранение
неоднозначности по скорости, подавление сигналов местных предметов,
формирование управляющего сигнала быстродействующего АРУ. Продукты отражаемости
ограничены отображением от -28 дБ и до 75 дБ. В реальных наблюдениях
встречаются такие низкие значения, как -30 дБ (обычно), и редко встречаются
такие высокие значения, как приблизительно 78 дБ. В действительности такие
значения, вероятно, являются предельными для атмосферных явлений. При установке
разрешения скорости по умолчанию -0,5 м/с МРЛ ограничивается наблюдением
скоростей в диапазоне ±62 м/с. Следовательно, это будет ограничением базовых
данных. Однако, если ожидается, что скорости ветра в тропических штормах или в
других особых случаях превысят эти пределы, то разрешение скорости можно
расширить, установив разрешение скорости по умолчанию ~1 м/с. В этом случае
система способна провести измерение в диапазоне ±126 м/с. На практике система
уже измеряет скорости больше 67 м/с. Генератор радиолокационных продуктов
(RPG). Цифровые базовые данные с выхода RDA передаются через систему
широкополосной связи на RPG, где более мощная вычислительная система оценивает
весь трехмерный объем данных в полярной системе координат по всем углам
сканирования.
Данные об отражаемости даны матрицей 360° на 460 км, тогда
как данные о радиальной скорости - матрицей 360° на 230 км. Вычислительная
система RPG обрабатывает больше 250 000 строк кода, чтобы произвести и передать
метеорологические продукты. Эти продукты создаются алгоритмами. Измерение
скорости. Методика измерения скорости, используемая в WSR-88D, основана на
измерении доплеровской угловой частоты (со), т.е. измерении со = 2nf в
изменяющейся во времени функции вида у = coscot. Это эквивалентно измерению
скорости, так как частота линейно связана со скоростью доплеровским уравнением.
Фактическое вычисление - это расчет несмещенной оценки с минимальной дисперсией
комплексной ковариации доплеровского сигнала, представленного синфазным I и
квадратурным Q составляющими видеосигнала. Как уже отмечалось, комплексный
сигнал необходим для измерения знака доплеровской частоты, т.е. определения,
находится ли сдвиг частоты выше или ниже излучаемого сигнала, соответствующего
скоростям к радиолокатору или от него. Интерактивный контроль. Управление
аппаратурой WSR - 88D осуществляется через резидентную часть программы в
пользовательских терминалах. Главная функция управления системой (master system
control function, MSCF), или графический интерфейс пользователя используется
для того, чтобы установить все регулируемые параметры, которые определяют ЧСИ,
движение антенны и все пороги и границы обработки, включая установку
регулируемых параметров, которые влияют на сезонную и географическую
характеристику работы гидрометеорологических алгоритмов.RPG управляет всеми
процедурами анализа. Продукты, генерируемые алгоритмами, ставятся в очередь
согласно рабочим приоритетам и передаются по требованию. Продукты
метеорологического анализа.
Продукты WSR-88D могут быть сгруппированы по трем областям
применения:
) профилирование ветра, которое включает в себя
измерение скорости и сдвига ветра в оптически чистом пограничном слое, в
плотных слоях облачности, которые содержат лишь чрезвычайно слабые осадки, и в
областях проливного дождя в слоистообразных и конвективных штормах;
) измерение осадков, которое включает в себя получение
количественных данных, нанесенных на координатную сетку для отображения в
национальном масштабе, и локализованных данных, которые позволяют местным
метеорологам и гидрологам прогнозировать перемещение областей осадков по определенным
водоразделам;
) штормоповещение, которое дает информацию о местоположении
относительно сильных гроз, а также вероятностную оценку наличия в них града и
торнадо. Графические продукты отображаются после анализа множества полей данных
в RPG. Некоторые из них создаются непосредственно по полярным данным обзора.
Например, базовые продукты отражаемости, радиальной скорости и ширины спектра
преобразуются для получения полярных матриц с разным разрешением по расстоянию
(отражаемость на участке 1, 2 или 4 км х 1°; скорость и ширина спектра на
участке 0,25; 0,5 или 1 км х 1°). Матрицы могут быть закодированы цветом или
оттенками серого для их оперативного использования. Остальные продукты
генерируются после того, как алгоритмы анализа геометрически объединят данные в
слои или преобразуют их в другие единицы, например сдвиг, который определяется
по полю скоростей. Другие же алгоритмы ищут базовые данные по особым признакам
отражаемости и скорости, а найдя, отмечают опасные явления, которые будут
отображаться на пользовательских дисплеях в виде символов или буквенно-цифровых
обозначений. Устанавливаются критические пороги данных, и данные фильтруются
для всех продуктов, ограничивая отображение данными, которые, как полагают,
свободны от шума и наиболее точны. Пользователи данных WSR-88D разрабатывают
собственные системы отображения метеорологических продуктов, генерируемых RPG.
Первой основной системой отображения данных WSR-88D был главный
пользовательский процессор (principal user processor, PUP), установленный на всех
пользовательских станциях агентств NEXRAD. Последний PUP выведен из
эксплуатации в 2006 г. PUP заменен версией архитектуры на базе открытых систем
и назван открытым PUP. Открытый PUP считается новым базовым устройством WSR-88D
и используется для отображения новых продуктов. С внедрением генератора
открытых радиолокационных продуктов (open radar product generator, open RPG)
для NEXRAD министерство торговли (DOC), министерство обороны (DOD) и
министерство транспорта (DOT) США предоставили возможность отправлять
пользователям базовые данные WSR-88D в реальном времени.
3. Метеорологические радиолокаторы «Метеор» фирмы
SELEX SISTEMI INTEGRATI, GMBH
Автоматизированный метеорологический радиолокационный
комплекс (АМРК) «Метеор-Метеоячейка» (рис. 1.2) предназначен для
обнаружения облаков и связанных с ними атмосферных явлений (обложных и ливневых
осадков, гроз, града и снегопада), а в доплеровском режиме работы - для
определения параметров радиальных скоростей, а также передачи информации об
обнаруженных опасных явлениях в прогностические службы Росгидромета и через АИС
«МетеоСервер» в автоматизированные системы управления воздушным движением для
обеспечения безопасных условий взлета, посадки и полета воздушных судов. АМРК
«Метеор-Метеоячейка» - это серийно выпускаемый фирмой Selex Si/Gematronik
(Германия) доплеровский метеорологический радиолокатор «Метеор 500С» (частота
излучения 5640 МГц) с программным обеспечением рабочей станции
инженера-метеоролога (РС-М).АМРК «Метеор-Метеоячейка» (рис. 1.3) является автоматизированным
импульсным когерентным доплеровским метеорологическим радиолокатором.
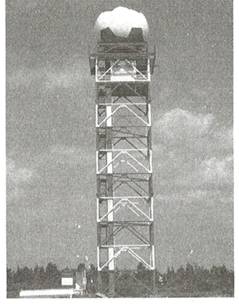
Рисунок 1.2 - Установка РЛС «Метеор» на вышке
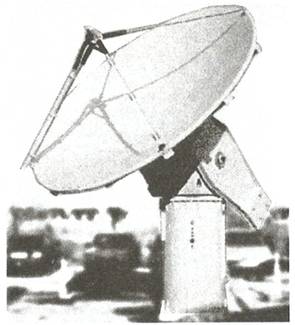
Рисунок 1.3 - Антенная колонка РЛС «Метеор 500С»
3.1 Состав (конфигурация)
АМРК «Метеор 500С-Метеоячейка» (рис. 1.4) состоит из следующих
систем.
Основные системы:
) антенная система (CLP-10),
) блок управления антенной (ACU),
) волноводная система (WP),
) процессор управления (RCP),
) передатчик ТХС400,
) приемник RXC510 (аналоговая (ARX) и цифровая (GDRX)
части),
) рабочая станция инженера по радиолокации (РС-Р)
(IIAVIS),
) рабочая станция инженера-радиометеоролога (РС-М),
) рабочие станции потребителей информации (PC МАРС).
Примечание: PC МАРС представляет собой отдельное изделие и не
входит в состав АМРК «Метеор-Метеоячейка».
Рабочая станция радиоинженера (РС-Р):
) персональная ЭВМ типа HP (одна) с предустановленной
операционной системой Windows ХР Pro,
) сетевой фильтр Pilot,
) устройство бесперебойного энергоснабжения Back-UPS,
) мультиплексор 8RS232,
) программа RAVIS,
) соединительные кабели,
) комплект эксплуатационной документации.
) персональная ЭВМ типа HP (одна) с предустановленной
операционной системой Windows ХР Pro,
) сетевой фильтр Pilot,
) устройство бесперебойного энергоснабжения Back-UPS,
4) мультиплексор 8RS232,
5) специальное программное обеспечение РС-М (ИТАВ
416311.008 Метеоячейка 2.0),
) соединительные кабели,
) комплект эксплуатационной документации,
) шкаф телекоммуникационный стандарта 19»,
) модем с комплектом разъемов для связи с абонентами,
) печатающее устройство (принтер девятиигольчатый)
формата А4.

Рисунок 1.4 - Функциональная схема РЛС «Метеор 500С»

Рисунок 1.5 - блок схема РЛС «Метеор 500С»
3.2 Встроенные системы АМРК
В АМРК используются сложные алгоритмы управления и обрабатываются
большие объемы данных в режиме реального времени. Для решения этих задач -
используются готовые коммерческие решения (commercial off-the-shelf, COTS),
такие как встроенные системы, промышленные компьютеры, стандартные промышленные
интерфейсы для взаимодействия различных компонентов системы, специализированное
программное обеспечение, включая системы. Принятый разработчиками АМРК подход
упрощает разработку системы как целого и позволяет с легкостью расширять и
адаптировать радиолокатор под конкретные нужды заказчика. Под встроенной
системой понимается любая компьютерная система, работающая совместно с другим
оборудованием и размещаемая с ним либо в одном конструктиве, либо внутри
данного оборудования. Обычно она представляет собой решение на базе микропроцессора
или микроконтроллера и реализует какую-либо специальную функциональность, но
может быть и полноценным стоечным компьютером, обладающим всеми привычными
возможностями и компонентами обыкновенного компьютера.
Основные системы АМРК «Метеор-Метеоячейка» (рис. 5),
связанные с управлением или обработкой данных, реализованы в виде встраиваемых
систем - это процессор управления RCP-L, блок управления ACU, цифровой приемник
GDRX и сигнальный процессор. Процессор управления RCP представляет собой стоечный
компьютер, состоящий из пассивной объединительной платы с шиной CompactPCI и
двух плат стандарта Compact PCI. Первая плата - это одноплатный компьютер с
процессором Power PC МРС 8245, базирующимся на RISC-архитектуре. На плате
располагаются оперативная память SDRAM, флэш-память для хранения операционной
системы и приложений, разъемы Fast Ethernet для связи с цифровым приемником,
сигнальным процессором и клиентами, интерфейсы COM, USB, IDE и PS/2. Также
имеются разъемы для расширения возможностей компьютера посредством подключения
дополнительных карт, удовлетворяющих стандартам M-Module, PC-MIP
(multiple-in-line package) и PMC (PCI Mezzanine Card). Процессор управления RCP
работает под управлением операционной системы реального времени VxWorks
(разработка американской фирмы Wind River) и программного обеспечения Racon
(Selex-Gematronik). Вторая плата процессора управления используется для
М-модулей для управления различными подсистемами радиолокатора и сбора
диагностической информации. Один из этих модулей выполняет функции управления
шиной Profibus (process field bus - спецификация открытой высокоскоростной шины
для цифрового технологического оборудования), по которой процессор управления
получает с аналоговых и цифровых датчиков информацию о состоянии всех узлов
радиолокатора. В этом модуле используется один из процессоров семейства МС86000
(производства Motorola) на базе CISC-архитектуры. Блок управления антенной ACU
включает в себя одноплатный компьютер на базе процессора PowerPC МРС 8245 с
шиной VME (Versa Module Europe), аналогичный одноплатному компью¬теру,
используемому в процессоре управления. Также через общую шину VME к компьютеру
подключены модуль управления шиной Profibus (такой же, что и в процессоре
управления) и контроллер синхронного последовательного интерфейса для
считы¬вания показаний кодировщиков положения антенны. Цифровой приемник GDRX
управляется процессором PowerPC МРС 8540, который, помимо непосредственно
высокой производительности как процессора, включает в себя широкий набор контроллеров
(памяти DDR SDRAM ЕСС, Ethernet различных скоростей, шины PCI, локальной шины,
последовательных интерфейсов и пр.). Процессор отвечает за прием и выполнение
управляющих команд, форматирование и передачу данных сигнальному процессору или
клиентам, управление сигнальными процессорами, обеспечение взаимодействия с
платами расширения и внешними интерфейсами. В качестве операционной системы
используется дистрибутив Linux с поддержкой RTAI (real time application
interface - интерфейс приложений реального времени). Обработка данных в
цифровом приемнике производится в основном тремя цифровыми сигнальными
процессорами Tiger - SHARC ADSP-TS101S. Первый отвечает за получение данных I/Q
- каналов от АЦП или выборки сигнала передатчика, преобразование данных в числа
с плавающей запятой, коррекцию значений по результатам калибровки, выбор
используемого канала приемника (низкой или высокой чувствительности),
преобразование порядка следования данных, синхронизацию с положением антенны и
при необходимости предварительную фильтрацию. Два других цифровых сигнальных
процессора вычисляют моменты комплексной корреляционной функции и
метеопараметры и передают результаты центральному процессору. Все параметры
обработки и сами микропрограммы, используемые цифровыми сигнальными процессорами,
загружаются центральным процессором.
3.3 Принципы работы АМРК
Работу АМРК изложим по функциональной и блок-схеме. Активно
стабилизируемый коаксиальный магнетрон передатчика генерирует СВЧ импульс,
который проходит через антенный переключатель и излучается антенной. Антенна
излучает СВЧ импульс передатчика с симметричной узконаправленной диаграммой
направленности антенны. Сканирование антенны по азимуту и углу места происходит
в соответствии с программой метеорологических наблюдений. На этом этапе
передачи СВЧ импульса приемник блокируется ограничителем приема-передачи
антенного переключателя, что предотвращает попадание энергии из циркулятора
антенного переключателя на чувствительный приемник. После передачи импульса
ограничитель приема-передачи открывается и соединяет тем самым через циркулятор
приемник с антенной. Начинается этап приема, на котором приемник принимает
сигналы, отраженные гидрометеорами. Этот этап продолжается до излучения
следующего микроволнового импульса.
Принятый сигнал оцифровывается и двоично кодируется.
Оцифрованные выборки передаются по высокоскоростной линии на
процессор радиолокационных сигналов для дальнейшей обработки и анализа.
Цифровой приемник с процессором обработки сигналов GDRX (фирмы Selex
Si./Gematronik) выполняет четыре главные функции: создает фазовый эталон по
имеющийся выборке импульсов передатчика и вырабатывает комплексный модулирующий
сигнал, предварительно обрабатывает принятые комплексные модулирующие сигналы,
генерирует импульсы для запуска радиолокатора и вводит в принятые данные
информацию об угловом положении антенны, создавая таким образом
пространственный эталон информации. Процессор обработки отраженных сигналов
производит их быструю оцифровку с высоким разрешением, гибкую фильтрацию
сигналов, отраженных от местников, осреднение отраженных сигналов по времени и
дальности и их пульспарную обработку.
Выполняя обычные функции приемника в программируемой среде,
GDRX обеспечивает полную гибкость формирования полосы пропускания ПЧ (для
максимальной чувствительности к излучаемому сигналу), фильтрацию полосы частот
видеосигнала, управление частотой стабилизированного гетеродина STALO и
генерацию излучаемых импульсов. Благодаря тому что процессор обработки сигналов
производит подробный анализ каждого излученного импульса, есть возможность на
постоянной основе контролировать частоту передатчика. Процессор управления
(RCP) с локальным контролем управляет АМРК и следит за его функционированием. В
частности, под его контролем находятся встроенные средства диагностики (BITE).
В целом контролируется состояние большого числа параметров подсистем АМРК, и в
случае сбоя процессор управления RCP действует по заданным приоритетам в
соответствии с важностью сбоя для работы АМРК.
Помимо всего прочего, процессор управления обеспечивает
совместную работу радиолокатора и рабочей станции инженера-радиометеоролога
РС-М. Главной задачей РС-М является получение (извлечение) метеорологической
информации (продукции) из сигналов, отраженных от метеообразований.
Радиопрозрачное укрытие (РПУ) антенны создает комфортные
условия для работы антенной системы и представляет собой сферическую
конструкцию без плоскостей, вторгающихся в полезную площадь обтекателя или
создающих систематические отражения. Поверхность обтекателя гидрофобна и устойчива
к солнечному облучению, пыли, граду и ветру с песком. Радиопрозрачное укрытие
антенны устанавливается на крыше здания или на вышке, снабжается молниеотводом
и сигнальными фонарями согласно спецификации ICAO. Обтекатель укрепляется на
металлическом кольце, забетонированном в фундамент здания или установленном на
металлической платформе вышки узкая диаграмма направленности антенны и малые
боковые лепестки, большая точность наведения, быстрая реакция срабатывания
системы управления антенны по углу места при увеличении скорости сканирования,
жесткая механическая конструкция и минимальные требования к обслуживанию.
Современные метеорологические радиолокаторы с цифровой обработкой данных почти
99% рабочего времени эксплуатируются в режиме сканирования. Под объемным
сканированием понимается вращение антенны по азимуту на 360° при ступенчатом
изменении ее положения по углу места. Угол места должен меняться как можно
быстрее, чтобы минимизировать общее время сканирования.
Антенная система АМРК имеет преимущества: узкая диаграмма
направленности антенны и малые боковые лепестки, большая точность наведения,
быстрая реакция срабатывания системы управления антенны по углу места при
увеличении скорости сканирования, жесткая механическая конструкция и
минимальные требования к обслуживанию. Современные метеорологические
радиолокаторы с цифровой обработкой данных почти 99% рабочего времени
эксплуатируются в режиме сканирования. Под объемным сканированием понимается
вращение антенны по азимуту на 360° при ступенчатом изменении ее положения по
углу места. Угол места должен меняться как можно быстрее, чтобы минимизировать
общее время сканирования. Антенная система АМРК оптимизирована по времени
реакции на изменение угла места для повышения скорости получения данных по объему
пространства.
3.4 Схема и конфигурация АМРК
В месте установки радиолокатора «Метеор 500С» присутствие
обслуживающего персонала во время оперативной работы не требуется.
Процессор управления радиолокатором (RCP) обеспечивает
интеллектуальную связь между радиолокатором и рабочей станцией
инженера-радиометеоролога (РС-М) и связан с процессором обработки сигналов
(рис. 2.3.5).Связь радиолокатора с удаленными рабочими станциями АМРК
«Метеор-Метеоячейка», находящимися в авиаметеоцентре, осуществляется по арендованным
линиям связи.
3.5 Технические характеристики
Основные характеристики подсистем автоматизированного
метеорологического радиолокационного комплекса «Метеор - Метеоячейка», которые
относятся к «Метеор 500С» и РС-М, представлены в АМРК «Метеор-Метеоячейка»
имеет две длительности импульса, которые выбираются в зависимости от режима
работы. Для получения высокой чувствительности используется длинный импульс в 2
мкс, что соответствует разрешению по дальности 300 м, а для доплеровского
режима используется стандартный короткий импульс в 0,83 мкс с более высоким
разрешением по дальности 125 м, что усиливает подавление местников, но
уменьшает потенциал АМРК «Метеор полученные в процессе сертификационных
испытаний на основании измеренных технических характеристик АМРК и уравнения
радиолокации атмосферных образований.
3.6 Обработка информации цифровым приемником GDRX
Основная обработка отраженных сигналов в АМРК производится
цифровым приемником фирмы Gematronik (GDRX) и процессором сигналов.
Механизм обработки GDRX базируется на трех процессорах для
обработки сигналов Tiger Share DSP (240*МГц, до 4,5 gflops па плате, расширение
через модуль РМС, 128 Мбайт SDRAM - synchronous dynamic RAM).В качестве
системного контроллера и механизма вывода данных в GDRX используется
управляющий процессор Power PC Network Processor MPC 8540. Он обслуживает
интерфейс SDRAM, контроллеры Ethernet, два асинхронных интерфейса, локальную
шину и интерфейс локальной шины PCI. Power PC как интегрированный процессор
(управляющий и коммуникационный), по мнению разработчиков GDRX, идеален для
взаимодействия с Gigabit Ethernet. Под последним понимается развитие сетевой
технологии Ethernet, основанное на использовании специальных
высокопроизводительных сетевых плат и высокоскоростных каналов. GDRX имеет
четыре аналоговых входных канала, предназначенных для поддержки сигналов ПЧ на
частотах 80 МГц. Два используются для приема сигналов горизонтальной
поляризации (Н), а два других - для приема сигналов с вертикальной поляризацией
(F). Для каждой поляризации существуют каналы высокой (High) и низкой (Low)
чувствительности. Если используется только одна (горизонтальная) поляризация,
то вертикальный канал не рассматривается.
Конструкция GDRX с двумя каналами поляризации используется
для расширения линейного динамического диапазона по сравнению с конструкцией
приемника с одним каналом и одной поляризацией. Принцип этого расширения можно
объяснить следующим образом. Предположим, что линейный динамический диапазон
14-бит АЦ преобразователя составляет 85 дБ. В конструкции цифрового приемника с
одним каналом это является ограничивающим фактором для всего линейного
динамического диапазона.
В конструкции с двумя каналами применяется второй канал,
ослабленный, например, на 20 дБ и получающий с приемника тот же самый сигнал
ПЧ. В такой ситуации если первый (не ослабленный) канал АЦП (канал высокой
чувствительности) насыщен, то второй, ослабленный канал (канал низкой
чувствительности) ниже насыщения на 20 дБ. Оба канала объединены логикой
обнаружения канала от строб-импульса к строб-импульсу, которая строб за стробом
решает, с какого из каналов взять данные - с высокого или низкого. Линейный
динамический диапазон в приведенном примере охватывает 85+20=105 дБ.
Рассмотрим, как в АМРК осуществляется первичная обработка отраженных сигналов,
а также процесс формирования коммуникационного слоя и различные конфигурации
обработки в процессоре сигналов (SP).В среде обработки сигналов (SPE) на вход
поступают первичные радиолокационные данные типа I/Q, а на выходе получаются данные
в виде моментов (например, отражаемость, скорость). Цепочка обработки данных
процессором сигналов (SP) состоит из нескольких модулей обработки, которые
взаимосвязаны в соответствии с заданным режимом обработки. Типичная цепочка
состоит из приемника данных I/Q и нескольких модулей (например, для фильтрации
местников,
. Потенциал АМРК «Метеор-Метеоячейка» в режимах
Измерение отражаемости и Доплеровская скорость превышают 270 дБ на 11,6-19,4
дБ. Таким образом, в каждом режиме работы радиолокатора его информация может
применяться при метеообеспечении авиации.
. Площади радиоэха облаков и осадков, наблюдаемые на
АМРК «Метеор-Метеоячейка», должны быть больше площадей на любом канале МРЛ-5, а
также больше дальности обнаружения облаков и осадков и выше точности
определения высоты их верхней границы.
. Уменьшение влияния ослабления радиоволн в атмосфере
на X = 5,3 см по сравнению с X = 3,2 см и возможность более точного учета
такого ослабления обеспечивают получение более репрезентативных данных по
отражаемости на АМРК «Метеор - Метеоячейка» по сравнению с первым каналом
МРЛ-5.В режиме Доплеровская скорость конечным продуктом на АМРК, который
поступает потребителю, является пространственное распределение радиальных
скоростей в радиусе обзора 125 км по квадратам 4x4 км. На основании обработки
информации отраженных сигналов в каждом импульсном объеме, которая производится
в GDRX, получаются данные о средней радиальной скорости метеоцели и о ширине
спектра скоростей. Их дальнейшая обработка, распространение по квадратам 4x4
км, расчет и пространственное распределение радиальных (доплеровских) скоростей
в радиусе обзора производятся специальным программным обеспечением РС-М.
Радиальные скорости рассчитываются под одним углом места антенны АМРК в периоды
между наблюдениями в режиме измерение отражаемости. На основе прямых измерений
радиальной скорости могут быть рассчитаны явления, представляющие значительную
опасность при взлете и посадке самолета (смерч, сдвиг ветра). По сдвигу ветра
можно определить фронт порывистости и микрошквал.
4. Метеорологический радиолокатор для авиации Meteor 1500С
Meteor 1500С - радиолокационная система с истинной
когерентностью. Передатчик и приемник всегда работают на одном и том же фазовом
эталоне как базисе высокоточной доплеровской обработки и оптимального
подавления местников. Передатчик на клистроне совместно с когерентным
приемником на 20 дБ повышает стабильность и улучшает подавление местников по
сравнению с Meteor 500С, работающим на коаксиальном магнетроне. Ключевым
компонентом Meteor 1500С является передатчик ТХС 1500, представляющий собой
твердотельный модулятор, управляющий клистронной трубкой. Клистронный
передатчик - это усилитель активной мощности. Он генерирует микроволновые
импульсы посредством импульсно-модулированного усиления несущего сигнала,
создаваемого приемником. Основные преимущества ТХС 1500 следующие: большая
средняя и пиковая мощность, большое усиление, высокая эффективность, большая
длительность импульса и достаточный контроль формы волны и частоты. В комбинации
с твердотельным модулятором такие ключевые параметры, как длительность
импульса, управляются с помощью электроники. Эти величины можно задавать по
желанию потребителя.
Конструкция антенны разработана с учетом требований новых
стратегий сканирования. Усиленная механическая конструкция позволяет выбирать
размеры отражателя, обеспечивающие ширину луча от одного до половины градуса.
Для достижения эффективной дружественной структуры управления, которая могла бы
объединить в себе все модули одного радиолокатора и сети из нескольких
радиолокаторов, была применена распределенная архитектура управления
радиолокаторами (RACON). Многие диспетчеры поддерживают связь через стандартные
LAN TCP/IP, используя концепцию связи News-group и открытый формат макроязыка
RCL. Главное преимущество состоит в том, что, запустив RAVIS, любой
персональный компьютер на сети может выступать в роли терминала управления и
обслуживания. RAVIS, полностью запрограммированный в Java, визуализирует всю
информацию BITE и управления. В качестве стандартного инструмента для
потребителей метеоданных используется многофункциональный пакет программ
Rainbow. Rainbow обеспечивает интегрирование, обработку и распространение любых
метеорологических данных (радиолокационные метеопродукты, данные дождемеров,
спутников и т.д.). Он выполняет дистанционный контроль за метеорологическими
радиолокаторами в пределах метеорологической сети из одного или нескольких
центров управления датчиками (SCC). Rainbow обеспечивает получение уникального
числа продуктов и интерфейсов. Радиолокаторы Meteor 1500С отличают следующие
основные преимущества. В сравнении с магнетронным радиолокатором Meteor 1500С
характеризуется:
1) лучшим подавлением местников, работой в более свободной
полосе частот, восстановлением сигнала второго прохода, возможностью
использования процедур сжатия импульса и т.д.;
) строгая
архитектура модулятора и максимум доступных компонентов упрощают обновление
аппаратуры и оказание услуг;
) открытая
архитектура системы обеспечивает простой доступ пользователей к кодам, форматам
и данным;
) конструкция
с низкими эксплуатационными расходами, полным дистанционным контролем и
всесторонним BITE сводит к минимуму эксплуатационные расходы;
) предназначен для круглосуточной автоматической работы;
готовность на 97-99% подтверждена оперативной эксплуатацией в разных условиях;
) полностью
пригоден к работе в сети с множеством радиолокаторов и пользователей в составе
сети;
) программное
обеспечение Meteor 1500С предоставляет уникальный выбор объединенных
интерфейсов с другими метеорологическими датчиками и большой набор получаемых
метеорологических продуктов. Адаптированные режимы сканирования: объемное
сканирование чередуется с секторным сканированием важных областей с
использованием разных уровней приоритета. В сочетании с высокой гибкостью
параметров получения данных, обработкой в реальном масштабе времени и сжатием
данных обновление данных для выработки метеорологических продуктов происходит
почти мгновенно.
Продукты для авиации.
• Представление в стиле географическая обстановка
отображает метеорологические продукты в простом графическом формате наряду с
навигационными пунктами, маршрутами и другой информацией для быстрой
географической ориентировки персонала УВД.
• Продукты оповещения. Для определяемых
пользователем условий оповещения отображаются специальные предупреждающие
символы или текстовые сообщения, обозначающие опасные явления погоды типа
грозы, града, сильных ливней, поворота ветра, турбулентности или сдвига ветра.
• Продукты по сдвигу ветра. Анализируются изменения
скорости ветра в различных географических направлениях. Большие значения сдвига
могут считаться критерием предупреждения.
• В качестве индикатора опасной погоды используется
опыт NEXRAD, позволяющий обнаруживать микровзрывы с целью выделения районов с опасными
явлениями и их высоты над поверхностью Земли.
• Для алгоритма слежение за штормами в качестве
исходных берутся последовательные продукты и объединяются атмосферные элементы.
Рассчитывается и отображается траектория. Алгоритм подтверждения экстраполирует
короткое перемещение сегментов. Связь с другими метеорологическими датчиками и
авиационными приборами является ключевым критерием оценки работы авиационным
персоналом. Поэтому данное устройство пригодно для разных вариантов
интегрирования. Кодирование ASTERIX. Вместо компьютеров, предназначенных для
отображения данных метеорологических радиолокаторов, информацию можно получать
на экране радиолокатора УВД. На основе стандартов формата Eurocontrol ASTERIX
(all purpose struc-tured eurocontrol radar information exchange) AMS -
Gematronic поддерживает связь через интерфейс с существующими системами УВД.
Rainbow поддерживает кодирование ASTERIX, выделяя контуры зон осадков как
заштрихованные области декартовых и полярных векторов с шестью уровнями интенсивности.
Комплекс LLWAS. Дисплей географической обстановки на базе Java отображает
данные о ветре в реальном масштабе времени вместе с радиолокационными данными.
ВЧ тракт, предназначенный для сбора данных, - это процессор данных о ветре,
который обнаруживает сдвиг ветра и выдает сигнал тревоги о микровзрыве,
вырабатываемый системой LLWAS. Интегрирование радиолокационных данных снижает
частоту ложных тревог. Meteo Web Server-нтегрированная с Интернетом
метеорологическая информационная система Meteo Web Server создает новую мощную
обширную среду для распространения и визуализации метеорологических данных.
Meteo Web Server - это автономный распределительный сервер, который можно
подключать к приемным трактам датчиков потребителей (например, радиолокатора,
спутника, LLWAS, AWOS и т.д.). В основном эта связь базируется на стандарте
TCP/IP.
Технические данные - рабочие характеристики Meteor 1500С:
диапазон рабочих частот 5,6-5,65 ГГц;
ширина диаграммы направленности антенны в точках половинной
мощности (ном.) 0,55° (0,65°);
поляризация - линейная горизонтальная; усиление антенны
(ном.) 50 (47,5) дБ; пиковая мощность передатчика 250 кВт; длительность ВЧ
импульса 0,4-3,3 мкс; режимы по умолчанию: короткий / длинный (по заказу 3)
0,5/2,0 мкс;
частота следования импульсов от 250 до 2000 Гц, для режима по
умолчанию (500-1200)/(250-500) Гц;
типы первичных данных: с коррекцией и без коррекции Z, и,
разрешение первичных данных 8 бит; минимальное разрешение по
дальности 62,5 м.
Выводы
1. Зарубежные фирмы производят доплеровские MPЛ, не
обслуживаемые в месте их установки, в любом диапазоне частот (X, С и S) как на
магнетронах, так и на клистронах.
. Резко возросла эксплуатационная надежность MPЛ.
Гарантированные сроки службы магнетронов и усилительных клистронов превосходят
50000 ч. Вместо газоразрядных тиратронов в передатчиках MPЛ используются
импульсные модуляторы на базе твердотельных приборов с гарантированным сроком
службы, превышающим 50000 ч. Системы управления приводом антенны MPЛ переведены
на твердотельные устройства, которые не требуют обслуживания.
. В доплеровских MPЛ нового поколения используются
цифровые приемники (усилитель СВЧ - двухканальный квадратурный смеситель с
фазовым подавлением зеркального канала приема), которые позволили расширить
динамический диапазон до 5-100 дБ и осуществлять цифровую обработку сигналов на
про-межуточной частоте. В результате появилась возможность проводить обработку
информации в каждом дискрете дальности, равном или меньшем длительности
зондирующего импульса MPJI, с нумерацией и хранением в памяти ЭВМ каждого
дискрета дальности, а также реализацией в MPJI как пульсарной обработки
сигналов, так и быстрого преобразования Фурье.
. Разработаны многослойные радиопрозрачные укрытия с
водоотталкивающей поверхностью, которая не позволяет образоваться водяной
пленке во время интенсивных осадков и минимизирует эффекты ослабления радиоволн
в таких ситуациях.
Список
литературы
1 Активно-пассивная
радиолокация Под ред. Л.Г, Качурина, Л.И. Дивинского-СПб.; Гидрометеоиздат,
1992. -216 с.
Афанасьев
Г.Т., Здорик Ю.М. Аэростатное зондирование атмосферы. - Л.: Гидрометеоизат,
1974. - 141 с.
3
Борисенков Е.П., Альтер-Залик Ю.Ж., Кузнецов А.Д. Зондирование атмосферы
метеорологическими аэростатами. - Л.: Гидрометеоиздат, 1982. - 176 с.
4
Брылев Г.Б., Гашина СБ., Низдойминога Г.Л. Радиолокационные характеристики
облаков и осадков. - Л.: Гидрометеоиздат, 1986. - 232 с.
Дистанционное
зондирование в метеорологии, океанологии и гидрологии / Под ред. П.А,
Крекнелла. - М.: Мир, 1984, -535 с.
Дистанционное
зондирование. Количественный подход / Под ред. Ф. Свейка, Ш. Дейвис. - М.:
Недра, 1983. - 415 с.
Дюррани
Т., Грейтид К. Лазерные системы в гидрометеорологических измерениях / Пер. с
англ. Под ред. М.М. Божнова, М,: Энергия, 1980. - 336 с.
Ермаков
В.И., Кузенков А.Ф., Юрманов В.А. Системы зондирования атмосферы. - М.:
Гидрометеоиздат, 1977. - 304 с.
Ефимов
А.А. Принципы работы аэрологического информационно-вычислительного комплекса
АВК-1. - М.: Гидрометеоиздат, 1989. - 149 с.
Зайцева
Н.А. Аэрология. - Л.: Гидрометеоиздат, 1990. -221 с.
Инфракрасные
методы в космических исследованиях. М.: Мир, 1977.-384 с.
Качурин
Л.Г. Методы метеорологических измерений. - Л.: Гидрометеоиздат, 1985, - 456 с.
Киселев
В.Н., Кузнецов А.Д., Розанов В.В., Тимофеев Ю.М. Математическое обеспечение
автоматизированной обработки данных аэрологических наблюдений, выполненных с
помощью зарубежных измерительных систем. - Л, изд. ЛГМИ, 1989. - 105 с.
14 Кондратьев
К.Я., Тимофеев ЮМ. Метеорологическое зондирование атмосферы из космоса. - Л.:
Гидрометеоиздат, 1978. - 279 с.
метеорологический
радиолокационный доплеровский станция