Построение достоверности контроля состояния объекта управления
Адаптивная обработка
информации
Адаптивная обработка данных означает
изменение алгоритмов обработки после получения информации об объекте изучения,
на основе обработки этих данных или полученных новых данных.
Построение достоверности контроля
состояния объекта управления (опр. числа датчиков) на основе формулы Байеса:
P(AB) =P(A)*P (B/A)
Объект может быть в одном из двух
состояний:1 - объект работоспособен;2 - объект
неработоспособен;
P(H1) = 0.7
P(H2) = 0.3
Имеются 2 датчика состояния:
датчик даст правильные сведения с
вероятностью 0,9, а ошибочные с ведения с вероятностью 0,1
датчик даст правильные сведения с
вероятностью 0,7, а ошибочные с вероятностью 0,3

P(A) =
0,7*0,1*0,7+0,3*0,9*0,3 = 0,13(H1/A) = P(H1*A) / P(A) = (0,7*0,1*0,7) / 0,13 = 0,377 -
вероятность того, что объект работоспособен.
P(H2/A) = P(H2*A) / P(A) = (0,3*0,9*0,3) / 0,13 = 0,623 - вероятность того, что объект
неработоспособен.

(A) = 0,7*0,1*0,7*0,1 + 0,3*0,9*0,3*0,9
= 0,0778
P(H1/A) = (0,7*0,007)/0,0778 = 0,0629
P(H2/A) = (0,3*0,243)/0,0778 = 0,937
С вероятность 0,937 можно сделать
вывод, что объект работоспособен.
Решение задач на однородном линейном
комплексе
x3 - x1 ≥ 5
x5 - x3 ≥ 20
x5 - x2 ≥ 10
x4 - x2 ≥ 20
x6 - x4 ≥ 30
|
|
-x1
|
-y2
|
-y1
|
-y4
|
-x2
|
-y5
|
B
|
|
x3
|
-1
|
0
|
-1
|
0
|
0
|
0
|
5
|
|
y3
|
-1
|
-1
|
-1
|
0
|
1
|
0
|
15
|
|
x5
|
-1
|
-1
|
-1
|
0
|
0
|
0
|
25
|
|
x4
|
0
|
0
|
0
|
-1
|
-1
|
0
|
20
|
|
x6
|
0
|
0
|
0
|
-1
|
-1
|
-1
|
50
|
|
fmin
|
0
|
0
|
0
|
1
|
1
|
1
|
-50
|
Получаем:
x1 = 0
x2 = 0
x3 = 5
x4 = 205 =256 =
50
Распределение задач по свободным машинам,
желательно с учетом их взаимосвязи.

x1 ≤ 5 x1 -5 ≤ 0
x1 ≥ 2 - x1 + 2 ≤ 0
x2 ≥ 2 - x2 + 2 ≤ 0
x2 ≤ 5 x2 -5 ≤ 0
x2 ≤ 3 x2 -3 ≤ 0
)
|
1
|
0
|
0
|
1
|
-1
|
0
|
0
|
0
|
|
0
|
1
|
0
|
0
|
0
|
-1
|
1
|
1
|
|
0
|
0
|
1
|
-5
|
2
|
2
|
-5
|
-3
|
2)
|
001-122-5-3
|
|
|
|
|
|
|
|
|
0
|
1
|
0
|
0
|
0
|
-1
|
1
|
1
|
|
5
|
0
|
1
|
0
|
-3
|
2
|
-5
|
-3
|
)
|
5
|
0
|
1
|
0
|
-1
|
2
|
-5
|
-3
|
|
0
|
1
|
0
|
0
|
0
|
-1
|
1
|
1
|
|
10
|
0
|
5
|
-1
|
0
|
10
|
-25
|
-15
|
)
|
0
|
1
|
0
|
0
|
0
|
-1
|
1
|
1
|
|
5
|
2
|
1
|
0
|
-1
|
0
|
-3
|
-1
|
|
10
|
10
|
5
|
-1
|
0
|
0
|
-15
|
-5
|
)
|
5
|
2
|
1
|
0
|
-1
|
0
|
-1
|
-1
|
|
10
|
10
|
5
|
-1
|
0
|
0
|
-1
|
-5
|
|
5
|
5
|
1
|
0
|
-1
|
-1
|
0
|
2
|
|
10
|
25
|
5
|
-1
|
0
|
-1
|
0
|
10
|
x1 5 10 15 150
x2 = P1 2 + P2 10 + P3 9 + P4 225
x3 1 5 3 75
Решение однородной системы
x1 = 5P1
+ 10P2 + 15P3 + 150P4
x2 = 2P1
+ 10P2 + 9P3 + 225P43 = 1P1 + 5P2
+ 3P3 + 75P4
Решение задач на неоднородном
комплексе
t - время выполнения i - ой работыi = bi - ai ti - стоимость выполненных работ (линейно зависим от времени
выполнения)
Критерии эффективности -
максимальная стоимость
С = ∑(bi - ai ti) →
min (ti)
Ограничения: ti min ≤ t ≤ ti max
С = ∑(bi - ai ti) ≤ Z0
Оптимизация плана комплекса работ по
критерию минимума времени при условии, что стоимость всех работ комплекса не
превышает заданного Z0.
Z0 = 50
Критерий: t1 + t2 + t3 -> min
В этом сетевом графике мы не знаем,
какой путь будет самым длинным
Критич. путь: t1 - t2 - t3
,5 ≤ t1 ≤ 9
0,4 ≤ t3 ≤ 5
,3 ≤ t2 ≤ 3 0,2 ≤ t4 ≤ 6
|
-x1
|
-x2
|
-x3
|
-x4
|
B
|
|
y1
|
-1
|
0
|
0
|
0
|
-0,5
|
|
y2
|
1
|
0
|
0
|
0
|
9
|
|
y3
|
0
|
-1
|
0
|
0
|
-0,3
|
|
y4
|
0
|
1
|
0
|
0
|
3
|
|
y5
|
0
|
0
|
-1
|
0
|
-0,4
|
|
y6
|
0
|
0
|
1
|
0
|
5
|
|
y7
|
0
|
0
|
0
|
-1
|
-0,2
|
|
y8
|
0
|
0
|
0
|
1
|
6
|
|
y9
|
-10
|
-2
|
-3
|
-4
|
-5
|
|
y10
|
0
|
-1
|
-1
|
1
|
0
|
|
Fmin
|
1
|
1
|
1
|
0
|
0
|
|
-y1-y3-y5-y7B
|
|
|
|
|
|
|
x1
|
-1
|
0
|
0
|
0
|
0,5
|
|
y2
|
1
|
0
|
0
|
0
|
8,5
|
|
x2
|
0
|
-1
|
0
|
0
|
0,3
|
|
y4
|
0
|
1
|
0
|
0
|
2,7
|
|
x3
|
0
|
0
|
-1
|
0
|
0,4
|
|
y6
|
0
|
0
|
1
|
0
|
4,6
|
|
x4
|
0
|
0
|
0
|
-1
|
|
y8
|
0
|
0
|
0
|
1
|
5,8
|
|
y9
|
-10
|
-2
|
-3
|
-4
|
2,6
|
|
y10
|
0
|
-1
|
-1
|
1
|
0,5
|
|
Fmin
|
1
|
1
|
1
|
0
|
-1,2
|
Решение найдено.
Оптимальное значение критерия  .
.
Подсчитаем
Мы умеем исключать
лишние неравенства
Если будет много
равенств лишних
11 +
x12 = 10
x21
+ x22
= 511 + x21
= 512 + x22
= 10 = 0*x11 + 1*x12 + 1*x21 + 0*x22
→ min
|
- x11
|
- x12
|
- x21
|
- x22
|
B
|
|
0
|
1
|
1
|
0
|
0
|
10
|
|
0
|
0
|
0
|
1
|
1
|
5
|
|
0
|
1
|
0
|
1
|
0
|
5
|
|
0
|
0
|
1
|
0
|
1
|
10
|
|
z
|
0
|
1
|
1
|
0
|
0
|
|
- x1
|
- x2
|
- x3
|
- x4
|
B
|
|
0
|
1
|
1
|
0
|
0
|
10
|
|
0
|
0
|
0
|
1
|
1
|
5
|
|
0
|
1
|
0
|
1
|
0
|
5
|
|
0
|
0
|
1
|
0
|
1
|
10
|
|
Fmin
|
0
|
1
|
1
|
0
|
0
|
|
0
|
0
|
0
|
- x4
|
B
|
|
x1
|
0
|
-1
|
-1
|
-1
|
0
|
|
x3
|
0
|
0
|
1
|
1
|
5
|
|
x2
|
1
|
1
|
1
|
1
|
10
|
|
0
|
-1
|
-1
|
-1
|
0
|
0
|
|
Fmin
|
-1
|
-1
|
-2
|
-2
|
-15
|
|
0
|
0
|
0
|
- x3
|
B
|
|
x1
|
0
|
-1
|
0
|
1
|
5
|
|
x4
|
0
|
0
|
1
|
1
|
5
|
|
x2
|
1
|
1
|
0
|
-1
|
5
|
|
Fmin
|
-1
|
-1
|
0
|
-2
|
-5
|
Все прогнозы желательно выполнить
рекуррентно
y (0,0; n) = φ (0,1; n)*b (1,0) + E (0,0; n)
E[n] - помеха типа белый шум
Условие минимума
b (1,0; N) = A-1(1,1; N)*z (1,0; N)
Эл. матрицы А
Аij = ∑ φ1[n]* R[n] - φj[n
{z+i[N]} = ∑ {φi[n]}*R[n]*y{n}
Если A (1,1) = B (1,1) + φ (1,0)*φ (0,1), то
A-1=
B-1 - 
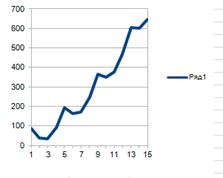
Имеем полином yni
= a+b*t+c*t2 без помех
Где 0 ≤ t ≤
15 a = 10 b = 15 с = 2
T
= 4
C
= (AT*A)-1*AT*y
Работу будем проводить в
MS Exel
Заполняем
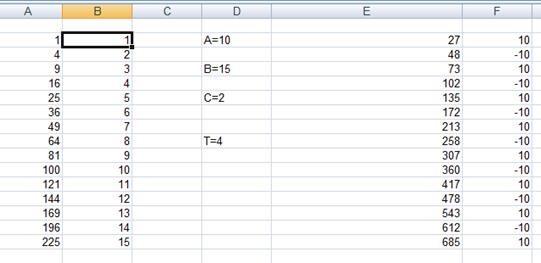
Где столбец B - t, а столбец А - t2, значения A,
B, C, T - нам известны.
Вычисляем yni
= a+b*t+c*t2 для каждого t.
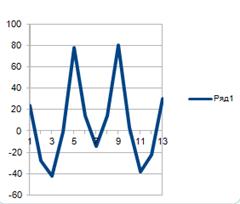
По формуле 50 Sin 2πt/T, вычисляем и получаем для каждого t.
Складывая три столбца
получаем результат в столбце I.
Получив ранее y - аппроксимированную, вычитаем его и получаем.
Получив данные a=68,11 b = -8,48 c
=3,43.
Вычисляем y для последних t
и получаем
Теперь построим графики
и посмотрим зависимость:


байес линейный
достоверность сезонный
Находим среднюю сезонную
составляющую.
