Синтез модального регулятора для объекта четвертого порядка
Синтез
модального регулятора для объекта четвертого порядка
1. Постановка задачи
Рассмотрим замкнутую
систему автоматического управления, структурная схема которой изображена на
рисунке, где  -
передаточная функция объекта управления,
-
передаточная функция объекта управления,  - передаточная функция
регулятора. Зададим передаточную функцию замкнутой системы
- передаточная функция
регулятора. Зададим передаточную функцию замкнутой системы  и
поставим задачу определения передаточной функции регулятора, обеспечивающего
желаемое расположение корней характеристического уравнения замкнутой системы.
и
поставим задачу определения передаточной функции регулятора, обеспечивающего
желаемое расположение корней характеристического уравнения замкнутой системы.
Пусть передаточная
функция объекта задана отношением двух полиномов  и
и  :
:
 ,
,
Где -
полином m-ой степени (m<n), -
полином n-ой степени.
Передаточную функцию
замкнутой системы зададим в виде отношения полиномов  и
и
 :
:
 ,
,
Где -
полином l-ой степени (l<k), -
полином k-ой степени (k>2n).
Полином будем
считать желаемым полиномом, т.е. таким полиномом, корни которого расположены
желаемым образом на комплексной плоскости.
Введём в рассмотрение
полиномы  ,
,
 и
и
 ,
,
 .
Полином
.
Полином  есть
частное от деления полинома
есть
частное от деления полинома  на полином
на полином  ,
а -
остаток от деления полинома на полином ,
т.е.
,
а -
остаток от деления полинома на полином ,
т.е.
 ,
,
Полином есть
частное от деления полинома на полином , -
остаток от деления полинома на полином т.е.
 ,
,
. Описание метода
решения задачи
Суть метода заключена в формулировке
следующих теорем и утверждений.
Теорема 1.
Если полиномы и
 делятся
соответственно на полиномы и
делятся
соответственно на полиномы и  без
остатка, то существует передаточная функция регулятора, обеспечивающая желаемое
расположение корней характеристического уравнения замкнутой системы. При этом
передаточная функция регулятора будет иметь вид:
без
остатка, то существует передаточная функция регулятора, обеспечивающая желаемое
расположение корней характеристического уравнения замкнутой системы. При этом
передаточная функция регулятора будет иметь вид:
 .
.
Доказательство теоремы
1. При выполнении условий теоремы выражения (3) и (4) запишутся
следующим образом:
(П. 1)  ,
,
(П. 2)  .
.
Характеристический
полином замкнутой системы с регулятором (5) будет иметь вид:
(П. 3)  .
.
Подставляя в (П. 3)
выражения (П. 1) и (П. 2), получим
 ,
,
что и доказывает
теорему.
Рассмотрим полиномы и
.
Полином является
полиномом (n-1) - й степени. является полиномом (m-1) - й степени. Представим полиномы и
в
развёрнутом виде:
 ,
,
 ,
,
где коэффициенты  и
и
 являются
линейными комбинациями коэффициентов полиномов и
являются
линейными комбинациями коэффициентов полиномов и  при
заданных коэффициентах полиномов и .
Равенства
при
заданных коэффициентах полиномов и .
Равенства  и
и
 ,
обеспечивающие делимость полиномов и на
полиномы и
,
будут выполнены, если будут выполнены равенства
,
обеспечивающие делимость полиномов и на
полиномы и
,
будут выполнены, если будут выполнены равенства
 ,
,
 .
.
Равенства (7) задают
систему линейных алгебраических уравнений относительно коэффициентов полиномов и
.
Представим систему регулирования, изображённой на рисунке, в переменных
состояния:
 ,
,
 ,
,
где x - n-мерный вектор
состояния, y - выход динамической системы, u
- вектор управления, A,
B, C - матрицы,
согласованные с векторами x,
u и y.
Наряду с системой (8),
рассмотрим систему:
 ,
,

где  -
внешнее возмущение, действующее на систему и удовлетворяющее однородному
линейному дифференциальному уравнению u-го
порядка. Представим линейное дифференциальное уравнение u-го порядка в виде системы линейных уравнений.
-
внешнее возмущение, действующее на систему и удовлетворяющее однородному
линейному дифференциальному уравнению u-го
порядка. Представим линейное дифференциальное уравнение u-го порядка в виде системы линейных уравнений.

и присоединив её к системе (9),
получим систему

где H - матрица размерности (1 х  ),
),
H=(1,0,…,
0).
Выберем число v так, чтобы выполнялось равенство  .
.
Теорема 2.
Если динамическая система (8) полностью управляема, а динамическая система (11)
полностью наблюдаема, то система линейных алгебраических уравнений (7)
разрешима.
Доказательство теоремы
2. Предположим, что система линейных алгебраических уравнений (7) не
имеет решения. Из этого предположения следует, что не существует передаточной
функции регулятора, обеспечивающего желаемое расположение корней
характеристического уравнения замкнутой системы. Действительно, передаточную
функцию регулятора можно найти по формуле
(П. 4)  .
.
Подставим в (П. 4)
выражение (1) и (2), получим

Поскольку полиномы  и
и
 в
этом случае не делятся соответственно на полиномы
в
этом случае не делятся соответственно на полиномы  и
и
 без
остатка, то характеристический полином замкнутой системы
без
остатка, то характеристический полином замкнутой системы  запишется
в виде
запишется
в виде
 ,
,
т.е. в этом случае
 .
.
С другой стороны,
система (11) по условию теоремы полностью наблюдаема и для неё существует
наблюдатель, описываемый системой дифференциальных уравнений
 ,
,
(П. 5)  ,
,
 ,
,
где  -
n-мерный вектор,
-
n-мерный вектор,  - v-мерный вектор,
- v-мерный вектор,  - вектор выхода
наблюдателя, H - матрица размерности (1 х v),
H = (1 0…0),
- вектор выхода
наблюдателя, H - матрица размерности (1 х v),
H = (1 0…0),  .
.
Матрицы  и
и
 всегда
можно выбрать так, чтобы выполнялось равенство
всегда
можно выбрать так, чтобы выполнялось равенство
 ,
,
где I - единичная матрица,  - желаемый полином
степени (n+v).
- желаемый полином
степени (n+v).
Из полной управляемости
системы (8) следует, что всегда найдётся управление  в
виде
в
виде  ,
обеспечивающее желаемое расположение корней характеристического уравнения
,
обеспечивающее желаемое расположение корней характеристического уравнения
 ,
,
где  -
желаемый полином степени n.
Заменив
-
желаемый полином степени n.
Заменив  на
в
управлении
на
в
управлении  ,
получим управление u как линейную комбинацию
переменных наблюдателя, и характеристический полином замкнутой системы с
наблюдателем в обратной связи будет иметь вид
,
получим управление u как линейную комбинацию
переменных наблюдателя, и характеристический полином замкнутой системы с
наблюдателем в обратной связи будет иметь вид
 .
.
Выберем элементы матриц K и R таким образом, чтобы
выполнялось равенство
 .
.

Следовательно, наше
предположение о том, что система линейных алгебраических уравнений (7) не имеет
решения, неверно. Теорема 2 доказана.
Утверждение 1.
Система линейных алгебраических уравнений (7) имеет бесчисленное множество
решений.
Доказательство
утверждения 1. Действительно, число уравнений системы (7) равно (n+m). Число коэффициентов полиномов и равно
(2k+2). Если коэффициенты полинома считать заданными, то
число неизвестных коэффициентов будет равно (k+1).
Поскольку решение системы (7) существует, то ранг системы (7) не превосходит (n+m),  и,
следовательно, меньше числа неизвестных. Отсюда следует существование
бесчисленного числа решений системы (7) относительно коэффициентов полинома .
и,
следовательно, меньше числа неизвестных. Отсюда следует существование
бесчисленного числа решений системы (7) относительно коэффициентов полинома .
Утверждение 2.
Регулятор с передаточной функцией (5) всегда реализуем.
Доказательство
утверждения 2. Рассмотрим полиномы  и
и  .
Как следует из формул (3) и (4), степени полиномов равны (k - n) и (l - m) соответственно.
Условие реализуемости передаточной функции (5) запишется, очевидно, следующим
образом:
.
Как следует из формул (3) и (4), степени полиномов равны (k - n) и (l - m) соответственно.
Условие реализуемости передаточной функции (5) запишется, очевидно, следующим
образом:
Или
(П. 6) 
Поскольку система (7)
имеет бесчисленное множество решений относительно коэффициентов полинома ,
то некоторые из них могут быть свободными. Число таких свободных коэффициентов
полинома равно
 .
Обратим в ноль
.
Обратим в ноль  первых
коэффициентов полинома .
Тогда степень l полинома Q1
(p) будет равна
первых
коэффициентов полинома .
Тогда степень l полинома Q1
(p) будет равна ,
т.е. (П. 7)
,
т.е. (П. 7)  .
.
Подставим (П. 7) в (П.
6), получим, что  .
.
Таким образом,
выполнение условия гарантирует
реализуемость передаточной функции регулятора (5).
3.
Стандартная форма Баттерворта


Где s=p
 ;
;
 ;
;
 ;
;
 ;
;
Зададим ω=50.
Переходный процесс изображен на Рис.
1. для интервала t=[0,1]
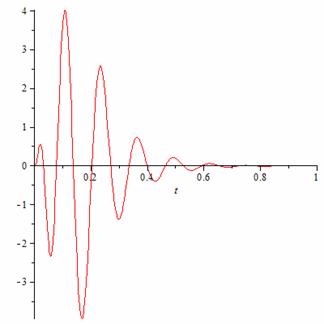
Рис. 1. Переходный процесс на
интервале t=[0,1]
Зададим ω=100
Переходный процесс изображен на рис.
2 для интервала t=[0,1]
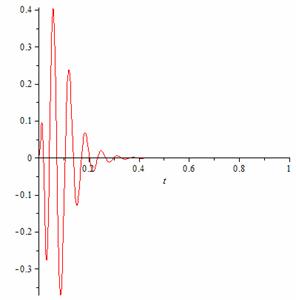
Рис. 2. Переходный процесс на
интервале t=[0,1]
Зададим ω=1000
Переходный процесс изображен на рис.
2 для интервала t=[0,1]
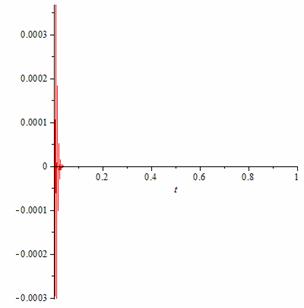
Рис. 3. Переходный процесс на
интервале t=[0,1]
Заключение
регулятор моделирование баттерворт
модальный
В результате работы было проведено
исследование динамики замкнутой системы с модальным регулятором. Построены
переходные процессы. Моделирование показало, что модальный регулятор
обеспечивает устойчивость замкнутой системы. График переходного процесса
показывает, что замкнутая система обладает свойством астатизма по задающему
воздействию. Моделирование было проведено с помощью пакета прикладных программ
Maple и MATLAB.является высокоуровневым интерпретируемым языком
программирования, включающим основанные на матрицах структуры данных, широкий
спектр функций, интегрированную среду разработки, объектно-ориентированные
возможности и интерфейсы к программам, написанным на других языках
программирования. Основной особенностью языка MATLAB являются его широкие
возможности по работе с матрицами.программный пакет, система компьютерной
алгебры. Система Maple предназначена для символьных вычислений, хотя имеет ряд
средств и для численного решения дифференциальных уравнений и нахождения
интегралов. Обладает развитыми графическими средствами.
Список литературы
1. Калман Р., Фалб П., Арбаб М. Очерки по математической
теории систем М. Мир, 1971.
. Кузовков Н.Т. Модальное управление и наблюдающие
устройства М. Машиностроение, 1976.
. Воронов А.А. Синтез минимальных модальных регуляторов,
действующих от измеримых входа и выхода линейного объекта. // АиТ. 1993 №2 С.
34-51.
. Воронов А.А. Синтез минимальных модальных регуляторов,
действующих по выходам. Дифференц. Уравнения. 1992. №11 С 1861-1871.