Проект системы управления электроприводом
1. Определение
параметров объекта регулирования
1.1 Расчёт цепи
преобразователя якоря (схема выпрямления 3ФМ)
Коэффициент схемы выпрямления по
напряжению:
= 6; - фазность пульсаций
выпрямленного напряжения;
 . Т.е.
. Т.е. 
Фазное напряжение на
вторичной обмотке трансформатора:
 .
.
Примем 100 В. Поскольку
трансформатор 380/100 понижающий.
Максимальная Э.Д.С. преобразователя
якоря:
 .
.
1.1.1 Расчёт цепи
преобразователя возбуждения (обмотка возбуждения в схеме выпрямления 3ФН)
Коэффициент схемы
выпрямления по напряжению цепи обмотки возбуждения:
 . Т.е.
. Т.е. 
Соответственно,
напряжение самой обмотки возбуждения:

Напряжение питания в
цепи обмотки возбуждения:
 .
.
Максимальная Э.Д.С.
преобразователя возбуждения:
 .
.
1.1.2 Выбор параметров
элементов системы управления электроприводом
Принимаем  -
температурный коэффициент для машин серии Д.
-
температурный коэффициент для машин серии Д.
Активное сопротивление
якорной цепи с учётом температурного коэффициента:

Активное сопротивление
цепи возбуждения с учётом температурного коэффициента:

Активное сопротивление
рассеяния трансформатора:
 Т.е 2,7 кВт - потери в
меди трансформатора.
Т.е 2,7 кВт - потери в
меди трансформатора.
 - принятый из ряда
номинальный выпрямленный ток преобразователя.
- принятый из ряда
номинальный выпрямленный ток преобразователя.

Эквивалентное
сопротивление рассеяния трансформатора:
 .
.
Где  (В)
- напряжение короткого замыкания трансформатора;
(В)
- напряжение короткого замыкания трансформатора;
Активное сопротивление
токоведущих шин:

Активное сопротивление
главной цепи:

Индуктивность якорной
цепи:

где  -
постоянная для скомпенсированных двигателей серии Д,
-
постоянная для скомпенсированных двигателей серии Д,  -
число пар полюсов двигателя.
-
число пар полюсов двигателя.
Индуктивное
сопротивление фазы трансформатора, приведенное ко вторичной обмотке:

Где  -
коэффициент схемы выпрямления.
-
коэффициент схемы выпрямления.
Индуктивность рассеяния
трансформатора:

Где  -
угловая частота питающей сети.
-
угловая частота питающей сети.
Индуктивность главной
цепи:

Электромагнитная
постоянная времени главной цепи двигателя:

где -
электромагнитная постоянная времени якорной цепи характеризует скорость
изменения силы тока в цепи при изменении подводимого к ней напряжения
-
электромагнитная постоянная времени якорной цепи характеризует скорость
изменения силы тока в цепи при изменении подводимого к ней напряжения  численно
равна времени за которое сила тока достигает значения установившегося при
скачке напряжения.
численно
равна времени за которое сила тока достигает значения установившегося при
скачке напряжения.
Электромагнитная
постоянная времени якорной цепи двигателя:
Индуктивность рассеяния:

где  -
поток рассеяния, а
-
поток рассеяния, а  -
коэффициент учета рассеяния принятый 1,5.
-
коэффициент учета рассеяния принятый 1,5.
Индуктивность цепи
возбуждения:

где  -
коэффициент наклона кривой намагничивания.
-
коэффициент наклона кривой намагничивания.
Электромагнитная
постоянная времени цепи возбуждения:
Номинальная Э.Д.С.
двигателя:

Где  -
напряжение эквивалентное падению напряжения в вентилях.
-
напряжение эквивалентное падению напряжения в вентилях.
Номинальный момент
двигателя:

Определяем коэффициенты
двигателя:
Для этого момент инерции
приведем к валу двигателя и получим суммарный момент:

Соответственно:


Электромеханическая
постоянная времени:

Постоянная времени
контура вихревых токов:

Передаточный коэффициент
цепи возбуждения двигателя:

Выбираем номинальные
параметры шунтов в соответствии со стандартным рядом:
Напряжение снимаемое с
шунтов 
Токи протекающие через
шунты:
 - ближайшее большее
значение из стандартного ряда;
- ближайшее большее
значение из стандартного ряда;
 - номинальный ток на
возбуждение.
- номинальный ток на
возбуждение.
Передаточный коэффициент
шунтов якоря:

Передаточный коэффициент
шунтов возбуждения:

Коэффициент усиления
датчиков тока якоря:

Где  -
максимальное значение датчиков тока для УБСР.
-
максимальное значение датчиков тока для УБСР.
 - максимальный ток
якоря.
- максимальный ток
якоря.
 - максимальное значение
датчиков тока для УБСР.
- максимальное значение
датчиков тока для УБСР.
Коэффициент усиления
вентильного преобразователя якоря:
Где  -
амплитудное значение напряжения СИФУ.
-
амплитудное значение напряжения СИФУ.
Относительное значение
минимальной Э.Д.С.:

Коэффициент усиления
вентильного преобразователя возбуждения:

Где  -
передаточный коэффициент СИФУ.
-
передаточный коэффициент СИФУ.
Коэффициент делителя
напряжения якоря двигателя:
Диапазон регулирования
скорости вращения двигателя (см. Рис. 1)
Некомпенсированная
постоянная контуров тока якоря и возбуждения 
Механическая
характеристика привода (точка холостого хода, см. Рис. 1):
1.1.3 Построение
механической характеристики электропривода

Рис. 1. Механическая
характеристика электропривода
2. Расчёт системы
регулирования
.1 Расчёт параметров
регулятора тока якоря (РТЯ)
1.) Задаемся  от
1 до 2 мкФ, тогда
от
1 до 2 мкФ, тогда  Т.е.
1 мкФ.
Т.е.
1 мкФ.

.) Выбираем
значение коэффициента интегрирования  в зависимости от
заданной величины перерегулирования
в зависимости от
заданной величины перерегулирования  (15%).
(15%).
Иначе доказательством выбора
коэффициента есть определение его исходя из обеспечения максимальной
производной тока (di/dtmax), при относительном значении
динамического тока, определяемого задатчиком интенсивности jд = 1. Т.е. Id = Iн
при номинальном потоке возбуждения (см. Рис. 2).

Рис. 2. Зависимость параметра
регулятора Тт с учётом ограничения производной по току при выборе коэффициента
интегрирования а
 Отсюда
Отсюда 
3.) Постоянная времени
интегрирования контура тока:

где  -
некомпенсированная постоянная времени контуров тока якоря и возбуждения.
-
некомпенсированная постоянная времени контуров тока якоря и возбуждения.
.) Определяем значение  для
регулирования скорости управлением в цепи якоря:
для
регулирования скорости управлением в цепи якоря:

Т.е. 1,094∙105
Ом.
.) Задаемся напряжением
ограничения регулятора  (для
УБСР).
(для
УБСР).
6.) Определяем RЗ.Т.Я.:

7.) Определяем КТ..Я.Р.Т.Я.:

2.2 Расчёт параметров
регулятора Э.Д.С. для регулирования скорости вращения двигателя с обратной
связью по Э.Д.С. двигателя при наличии датчика напряжения (ДН).
1.) Коэффициент делителя
напряжения двигателя:

где  Т.е.
2кОм - сопротивление участка делителя, с которого снимается сигнал.
Т.е.
2кОм - сопротивление участка делителя, с которого снимается сигнал.
 Т.е. 3 кОм - входное
сопротивление датчика напряжения.
Т.е. 3 кОм - входное
сопротивление датчика напряжения.
 Т.е 18 кОм - полное
сопротивление двигателя.
Т.е 18 кОм - полное
сопротивление двигателя.
.) Определяем
сопротивления:
Задаемся  (для
УБСР).
(для
УБСР).
 Т.е. 90 кОм.
Т.е. 90 кОм.

Аналогично для
определения коэффициента интегрирования  исходя из обеспечения
максимальной производной тока (di/dtmax), при относительном значении
динамического тока, определяемого задатчиком интенсивности jд = 1. Т.е. Id = Iн
при номинальном потоке возбуждения (см. Рис. 2).
исходя из обеспечения
максимальной производной тока (di/dtmax), при относительном значении
динамического тока, определяемого задатчиком интенсивности jд = 1. Т.е. Id = Iн
при номинальном потоке возбуждения (см. Рис. 2).
И наконец:
 Отсюда
Отсюда 
Определяем остальные
параметры:




.) Определяем ёмкости
конденсаторов:
 Т.е 1мкФ.
Т.е 1мкФ.
 Т.е. 1нФ.
Т.е. 1нФ.
3. Моделирование системы
с помощью ПЭВМ
Приведем к удобному для
моделирования виду все передаточные функции и параметры системы управления
напряжением якоря двигателя, а затем произведем моделирование при помощи
стандартной библиотеки Simulink имитирующей систему управления на основе
программного пакета MatLab версии 6.5.
3.1 Контур тока.





3.2 Вентильный
преобразователь якоря

3.3 Регулятор тока якоря
(РТЯ)

3.4 Регулятор Э.Д.С (РЭ)
Фильтр на входе
регулятора Э.Д.С:

Передаточная функция
самого регулятора Э.Д.С:

Датчик напряжения (ДН):

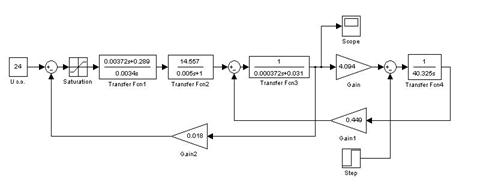
Рис. 3. Модель
регулятора тока при номинальном моменте нагрузки (Мс = Мн)
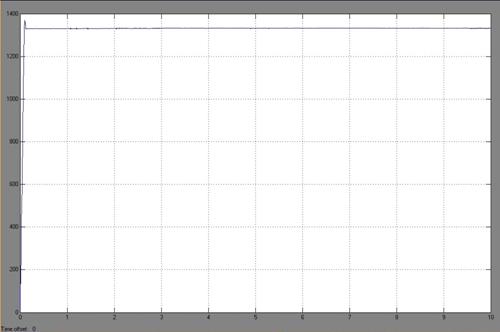
Рис. 4. Ток в контуре
регулятора тока при номинальном моменте нагрузки (Мс=Мн)
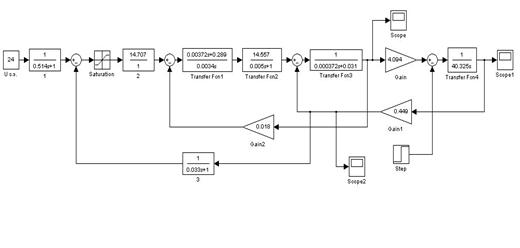
Рис. 6. Модель системы
управления скоростью вращения привода по принципу регулирования изменением
напряжения на якоре двигателя
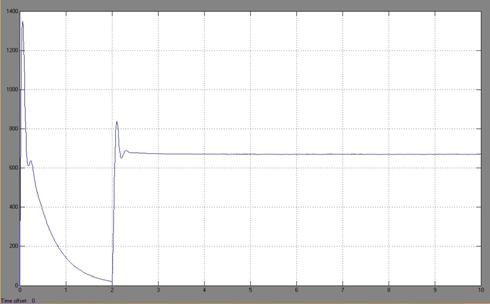
Рис. 7. График
зависимости тока якоря во времени после моделирования

Рис. 9. График
зависимости напряжения (Э.Д.С.) якоря двигателя во времени после моделирования

Рис. 10. График
зависимости скорости вращения якоря двигателя во времени после моделирования

Рис. 8. Модель системы
регулирования скоростью вращения привода по принципу управления изменением
напряжения на якоре двигателя
4. Выбор силовых
полупроводниковых приборов, коммутационной и защитной аппаратуры
.
Выбор силовых полупроводниковых приборов, сводится к определению
максимально-допустимого тока нагрузки, который определяется как средний ток
через вентиль  Основным
критерием, ограничивающим этот ток является
Основным
критерием, ограничивающим этот ток является  полупроводниковой
структуры, которая во всех рабочих режимах за исключением аварийных не должна
превышать максимально-допустимого значения.
полупроводниковой
структуры, которая во всех рабочих режимах за исключением аварийных не должна
превышать максимально-допустимого значения.
При естественном
охлаждении  или
или
 .
.
При принудительном
охлаждении  или
или
 .
.
Коэффициент
использования вентиля по току:


где  -
действующий ток через вентили;
-
действующий ток через вентили;
- средний ток через
вентили;
Коэффициент
использования по напряжению:
где  -
максимальное обратное напряжение на вентилях;
-
максимальное обратное напряжение на вентилях;
Так как схема
преобразователя якоря 3ФМ, тогда диоды выбираем  - максимально
- допустимый средний ток вентиля.
- максимально
- допустимый средний ток вентиля.
 коэффициент
использования вентиля по напряжению запаса с учетом запаса по напряжению.
коэффициент
использования вентиля по напряжению запаса с учетом запаса по напряжению.
 - коэффициент
использования вентиля по току с учетом естественного охлаждения.
- коэффициент
использования вентиля по току с учетом естественного охлаждения.
 - коэффициент
использования вентиля по току с учетом перегрузок по току.
- коэффициент
использования вентиля по току с учетом перегрузок по току.
 , откуда
, откуда  -
величина обратного напряжения, соответствующая числу вольт повторяющегося
напряжения классу прибора).
-
величина обратного напряжения, соответствующая числу вольт повторяющегося
напряжения классу прибора).
Рассчитав параметры
выберем диоды типа: Д171-400
Д - диод;
- установки общего
назначения;
- размер 14 мм;
- штыревой с гибким
выводом;
- ток ближайший больший
из стандартного ряда;
. Тиристоры выбираем
аналогично диодам, но учитывая схему выпрямления возбуждения 3ФН (трехфазная
нулевая):
Коэффициент
использования вентиля по току:
где -
действующий ток через вентили;
- средний ток через
вентили;
Коэффициент
использования по напряжению:
где -
максимальное обратное напряжение на тиристорах;

 .
.
Из справочника выбираем
тиристоры: Т131-15-6-УХЛ3
Т - тиристор;
- установки общего
промышленного назначения;
- размер 17 мм;
- штыревой с гибким
выводом;
- ток ближайший больший
из стандартного ряда;
- класс по напряжению
(600 В).
Тиристорный комплектный
агрегат на якорную цепь серии ТПР-3-500/230Т-30У4. Трансформатор ТСП 160/0,7.
Тиристорный комплектный
агрегат на возбуждение ТЕР9-100-230Т-31У4. Трансформатор ТСП 25/0,7.
Защита тиристоров.
Для защиты тиристоров от
перенапряжения сети в силовом блоке установлены варисторы RU1 - RU3 типа СН1-1-820 В
± 10% параллельно конденсаторам С1-С3 типа МБГЧ - 0,25мкФ-500 В ± 5%.
Конденсаторы С4-С6 типа К15-15-1,6 кВ 1500 пФ-Н20 служат для ограничения
скорости нарастания напряжения при подключении устройства к питающей сети.
С помощью силовых
предохранителей FU1 - FU12 типа ПП57-31372-У3 осуществляется защита от токов
короткого замыкания и перегрузки.
Защита тиристоров от
коммутационных перенапряжений осуществляется
RC-цепочками параллельно тиристорам R10-R15 типа С5-35В-10 - 20 Ом ± 10% и
С10-С15 типа К75-10-500 В - 0,68 мкФ ± 10%.
Шунты выбираем по  ,
для цепи якоря RS1 типа
,
для цепи якоря RS1 типа  .
.
Так как напряжение якоря
больше входного напряжения датчика напряжения, то используем делитель
напряжения. Суммарное сопротивление цепи делителя 18 кОм. Ток в цепи I =
216,2/18000 = 0,012 А. Используем 2 резистора типа ПЭВ - 5 - 8 кОм ± 10% и 1
резистор типа СП2 - 33-0,5 - 2кОм ± 10%.
Автоматические
выключатели выбираются по и
 :
:
цепь питания QF1 и QF2
типа ВА60-26 Ін = 1 А, Un = 110 В и 220В Iуст =1,1 Iн;
Цепь возбуждения QF5
типа АЕ2053М 80 Ін =100А Un=380В, Iуст=1,1 Ін; цепь якоря QF4 типа ВАБ Iн =
500А Un = 630В Iуст = 2 Ін.
Для управления
используем контакторы и пускатели: якорная цепь КМ1 типа КТ65 In = 500 А Un =
220 - 380 В.
Защита обмотки
возбуждения.
Шунтируем ОВ разрядным
резистором R31 = 22,2 Ом. Поскольку ток, протекающий через сопротивление
большой, то ставим ящик сопротивлений типа ЯС3-100/5 (5,6 Ом·4).
Минимальная токовая
защита используется в двигателях постоянного тока для защиты от обрыва цепи
обмотки возбуждения. Реле обрыва поля КА1 типа 
 .
Реле максимального тока в якорной цепи КА2 типа
.
Реле максимального тока в якорной цепи КА2 типа 
 .
Реле напряжения КV1 типа РЭВ 821 Un=220 Ucp=0,3Un. Сопротивление катушки 2кОм.
Используем добавочные сопротивления. Ток срабатывания реле: Icp = Ucp/Rk
= 0,11A. Сопротивление цепи катушки при токе 0,11А и напряжении 220 В, R =
440/0,11= 4000 Ом или 4 кОм. Используем резисторы типа ПЭВ 50 - 4 кОм ± 10% и
ПЭВР 50 - 4 кОм ± 10%.
.
Реле напряжения КV1 типа РЭВ 821 Un=220 Ucp=0,3Un. Сопротивление катушки 2кОм.
Используем добавочные сопротивления. Ток срабатывания реле: Icp = Ucp/Rk
= 0,11A. Сопротивление цепи катушки при токе 0,11А и напряжении 220 В, R =
440/0,11= 4000 Ом или 4 кОм. Используем резисторы типа ПЭВ 50 - 4 кОм ± 10% и
ПЭВР 50 - 4 кОм ± 10%.
5. Применение данной
разработки в металлургическом производстве
Проделав данную курсовую
работу я разобрался с системой управления электроприводами и новыми принципами
построения систем, их расчета и исследования. Прогресс в области электроники и
вычислительной технике позволил создать элементы для построения систем
автоматического управления удовлетворяющие возросшим требованиям
(электромагнитные усилители, магнитные усилители, транзисторы, микросхемы,
микро-ЭВМ).
В данной курсовой
работе для реализующих оптимальных законов управления используются элементы
аналоговой и цифровой вычислительной техники.
Я убедился что,
сочетание дискретного и непрерывного управления дает возможность создавать
системы обладающими высокой точностью и высокими динамическими характеристиками,
а также создает условие для комплексной автоматизации металлургических
агрегатов с применением ЭВМ.
Для себя я отметил,
что достоинствами систем подчиненного регулирования является:
малая мощность
управления, применение высоконадежных элементов выпускаемых на основе
современных технологий;
значительное
снижение стоимости, сокращение срока проектирования, монтажа, наладки и ввода в
эксплуатацию;
- высокая эксплуатационная
надежность и простота в использовании.
Данный электропривод можно
использовать в дозаторах, кранах, ленточных конвейерах и т.д.
Литература
1. Лебедев Е.Д., Неймарк В.Е., Пистрак М.Я., Слежановский О.В.
«Управление вентильными приводами постоянного тока». М. «Энергия» 1970 г.
. Гарнов В.К. Рабинович В.Б., Вишневский Л.М. «Унифицированные
системы автоуправления электроприводом в металлургии». М. «Металлургия» 1971 г.
. Фишбейн В.Г. «Расчет систем подчиненного регулирования
вентильного электропривода постоянного тока» М. «Энергия» 1972 г.
якорь цепь электропривод двигатель