Теоретические основы радиолокации
Федеральное
государственное бюджетное образовательное учреждение высшего профессионального
образования Московский Государственный Технический Университет имени
Н.Э.Баумана
Теоретические
основы радиолокации
Домашнее
задание
Группа:
РЛ1-89
Студент:
Кондаков А.В.
Москва 2013
г.
Реферат
Цель работы - приобретение навыков инженерных расчетов основных
характеристик современных радиолокационных станций.
В работе проводились расчеты таких характеристик, как дальность действия
РЛС, коэффициент усиления антенны, разрешающая способность, однозначность и
точность измерений. Было рассчитано число каналов по дальности и скорости при
заданных параметрах излучаемых импульсов. Также были получены тела
неопределённости для одиночного ЛЧМ импульса и для пачки импульсов. Была
смоделирована обработка пачки импульсов с шумом, поступающей на вход приемника
и построена соответствующая блок схема обработки.
Список
используемых сокращений
|
АС
|
-
|
антенная система
|
|
АП
|
-
|
антенный переключатель
|
|
АРМ
|
-
|
автоматизированное рабочее место
|
|
АЦП
|
-
|
аналого-цифровой преобразователь
|
|
ДН
|
-
|
диаграмма направленности
|
|
ДО
|
-
|
детектор огибающей
|
|
КИП
|
-
|
коэффициент использования поверхности
|
|
КН
|
-
|
когерентный накопитель
|
|
КП
|
-
|
командный пункт
|
|
ЛЗ
|
-
|
линия задержки
|
|
ЛЧМ
|
-
|
линейно-частотная модуляция
|
|
М
|
-
|
модулятор
|
|
МШУ
|
-
|
малошумящее устройство
|
|
РУ
|
-
|
решающее устройство
|
|
СМ
|
-
|
смеситель
|
|
СФ
|
-
|
согласованный фильтр
|
|
СФ ОРИ
|
-
|
согласованный фильтр одиночного радиоимпульса
|
|
ТТХ
|
-
|
тактико-технические характеристики
|
|
УМ
|
-
|
усилитель мощности
|
|
УПО
|
-
|
устройство первичной обработки
|
|
УПЧ
|
усилитель промежуточной частоты
|
|
Ф
|
-
|
фильтр
|
Исходные
данные
Длина волны……………………………………..…......λ = 0,7 м
Импульсная мощность…………………………….…...Pи = 500 кВт
Длительность импульса…………………………...…...τи = 28 мкс
Период повторения………………………………..….…Тп = 5 мс
Частота обзора………………………………………....n = 15 об/мин
Эффективная площадь рассеяния ……………….….……..σ = 5 м2
Длина антенны в горизонтальной плоскост…….……....l = 2,5 м
Вид внутриимпульсной модуляции ……………….….......ЛЧМ
Девиация частоты………………………….…………...Δf = 0,8 МГц
Коэффициент шума приемника……………….…….….Кш = 1,5 дБ
Вероятность правильного обнаружения………….……....D = 0,85
Вероятность ложной тревоги…………………..…...….….F = 10-3
1.
Структурная схема импульсного радиолокатора
На рисунке 1 показана структурная схема импульсного совмещенного
радиолокатора [1].
Рисунок 1 - Структурная схема совмещенного импульсного радиолокатора.
Поясним назначение элементов схемы:
1. АС - антенная система обеспечивает прием и передачу сигналов и
пространственную избирательность с помощью ДН антенны.
2. АП - антенный переключатель позволяет переключать передающий и
приемный режимы работы антенны.
. МШУ - мало шумящий усилитель.
. СМ - смеситель обеспечивает перемножение принятого сигнала с
сигналом гетеродина, тем самым перенося спектр полезного сигнала в область
низких частот.
. УПЧ - усилитель промежуточной частоты.
. Квадратурный детектор осуществляет перенос спектра сигнала на
нулевую частоту и выделение двух ортогональных составляющих сигнала, квадратур I и Q.
. АЦП - аналогово - цифровой преобразователь предназначен для
рафинирования данных и непосредственно для преобразования сигнала в цифровой.
. УПО - устройство первичной обработки осуществляет пороговую
обработку и измерение параметров сигнала.
. АРМ - автоматизированное рабочее место
. М - модулятор осуществляет требуемую модуляцию.
. УМ - усилитель мощности усиливает сигнал до требуемой мощности.
. Гетеродин предназначен для формирования промежуточной частоты.
. Синхронизатор определяет последовательность работы станции:
устанавливает частоту следования излучаемых импульсов, синхронизирует работу
приемника с работой передатчика.
2.
Определение основных тактико-технических характеристик РЛС
Площадь антенны:
 . (2.1)
. (2.1)
Коэффициент усиления антенны:
 = 100, (2.2)
= 100, (2.2)
где k - коэффициент использования
поверхности антенны.
КИП примем равным 0,8.
Определим отношение мощности сигнала к мощности шума на входе приемника,
исходя из заданных вероятностей правильного обнаружения и ложной тревоги для
релеевского распределения с m=1 для модели сигнала со случайной амплитудой.
 .
(2.3)
.
(2.3)
Период обзора определим по формуле (2.4).
 . (2.4)
. (2.4)
Ширину диаграммы направленности антенны можно определить по формуле (2.5)
 =16,8
=16,8  . (2.5)
. (2.5)
Раcсчитаем количество импульсов N, приходящихся на время облучения
цели, и участвующих в накоплению.
 =37, (2.6)
=37, (2.6)
 , (2.7)
, (2.7)
где ν - коэффициент различимости.
Расчет дальности действия радиолокатора проведем с помощью уравнения
радиолокации для РЛС кругового обзора
 (2.8)
(2.8)
Подставляя численные значения, получим
 (2.9)
(2.9)
Ширина основного лепестка напряжения на выходе СФ по уровню 0,5
определяется как  .
.
Сравним длительности сигналов на входе и выходе фильтра:
 (2.10)
(2.10)
где В - база сигнала.
Таким образом, после прохождения согласованного фильтра ЛЧМ сигнал
сжимается в В раз.
Проведем расчет разрешающих способностей и диапазонов однозначного
измерения дальности и скорости.
Разрешающая способность по дальности:
 (2.11)
(2.11)
где Δf -
девиация частоты сигнала.
Разрешающая способность по скорости:
 (2.12)
(2.12)
Разрешающая способность по азимуту равна ширине ДН антенны по уровню
половинной мощности в соответствующей плоскости:
 (2.13)
(2.13)
Потенциальная точность измерения параметров сигнала по дальности:
 (2.14)
(2.14)
Потенциальная точность измерения параметров сигнала по скорости:
 (2.15)
(2.15)
Точность измерения параметров сигнала по азимуту:
Определим
требуемое число каналов обработки по дальности и скорости.
При использовании корреляционно-фильтрового устройства обработки число
каналов по дальности определяется следующим образом:
 , (2.17)
, (2.17)
Число каналов по скорости определяется следующей формулой:
 . (2.18)
. (2.18)
Округлим результат выражения (2.18) до целого числа в большую сторону,
чтобы не ухудшить характеристики РЛС. Тогда требуемое число каналов по
скорости:
 . (2.19)
. (2.19)
3.
Структурные схемы оптимальной обработки сигналов
Существует две основные разновидности схем оптимальной обработки:
корреляционно-фильтровая и фильтровая.
.1
Корреляционно-фильтровая обработка
Основной операцией корреляционно-фильтровой схемы является вычисление
корреляционного интеграла, для чего требуется точное знание момента прихода
сигнала. Поэтому корреляционно-фильтровая схема (Рисунок 2) обработки включает
стробирующее устройство, представляющее собой генератор ЛЧМ импульсов, который
открывает схему подачи на перемножитель опорного сигнала.
Общее количество стробирующих каналов должно соответствовать диапазону
возможных времен запаздываний отраженного сигнала. Т. к. каждому интервалу
времени ΔT
соответствует своя
дальность принимаемого сигнала, то стробирующие каналы образуют каналы
дальности. Совокупность стробирующих импульсов "перекрывает" диапазон
возможных значений однозначных измерений дальности.
Расстояние между двумя каналами по дальности (расстояние между отводами
линии задержки на схеме) будет определяться длительностью сжатого импульса, а
не модулированного. Т.е. расстояние между двумя соседними каналами дальности
будет обратно пропорционально девиации частоты ЛЧМ сигнала.
Сжатие ЛЧМ сигнала заключается в снятии, или компенсации, частотной
модуляции. Данная операция осуществляется при перемножении входного и опорного
сигналов. Поэтому в схеме оптимальной обработки ЛЧМ сигнала будет
присутствовать ЛЧМ гетеродин, формирующий опорный ЛЧМ сигнал длительностью τи, зеркальный по отношению к излучаемому импульсу.
Длительность сжатого импульса много меньше длительности исходного
импульса, поэтому потери на обработку будут небольшими в случае расположения
каналов через τсж. Расстояние между каналами по дальности будет совпадать с ее разрешающей
способностью.
Рассмотрим работу одного дальностного канала.
Напряжение с выхода интегратора, поступает на узкополосные полосовые
фильтры Фi, каждый из которых настроен на свою центральную частоту.
Суммарная полоса фильтров соответствует диапазону возможных доплеровских частот
сигнала. Ширина полосы каждого фильтра определяется длительностью пачки
импульсов и равна 
После фильтрации осуществляется когерентное накопление сигнала с помощью
линий задержки и сумматора и выделение его огибающей в детекторе огибающей,
которое заключается в исключении высокочастотного заполнения. Значения
выделенной огибающей сравнивается с порогом. Решающее устройство осуществляет
выбор максимума, который будет наблюдаться только в одном канале.
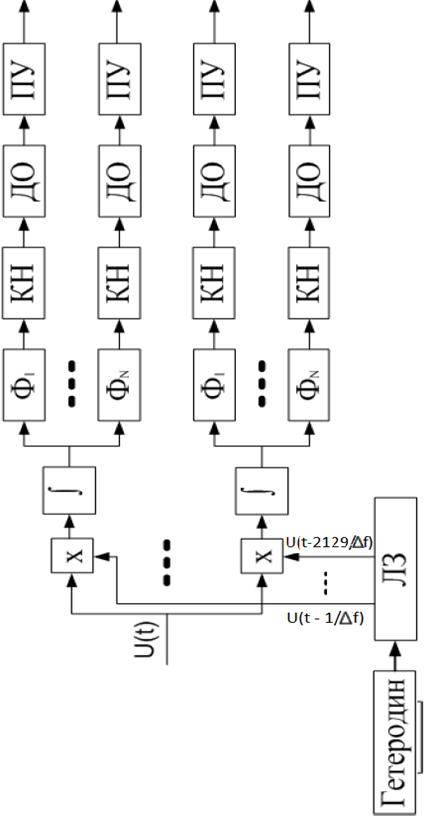
Рисунок 2 - Корреляционно-фильтровая схема когерентной обработки пачки
ЛЧМ сигналов
3.1
Фильтровая обработка
Структурная схема фильтровой обработки принимаемых сигналов на фоне шума
показана на рисунке 3.
Рисунок 3 - Структурная схема фильтрового оптимального обнаружителя
когерентной пачки ЛЧМ импульсов
Схема содержит согласованный фильтр для одиночного ЛЧМ импульса, линию
задержки с отводами (ЛЗ), нониусные линии задержки, учитывающие растяжение или
сжатие пачки при отражении от движущейся цели, и решающее устройство (РУ).
4. Построение
функции неопределенности
В комплексной записи ЛЧМ импульс длительностью  , с циклической частотой несущей
равной ω0 и девиацией равной Δf можно записать следующим образом
[3]:
, с циклической частотой несущей
равной ω0 и девиацией равной Δf можно записать следующим образом
[3]:
 (4.1)
(4.1)
Комплексная амплитуда прямоугольного радиоимпульса с ЛЧМ задается
выражением:
 (4.2)
(4.2)
где  - скорость изменения частоты.
- скорость изменения частоты.
Заданный сигнал показан на рисунке 4:

Рисунок 4 - Одиночный ЛЧМ импульс
Для расчета нормированной функции неопределенности сигнала U(t) воспользуемся формулой [4]:
 (4.3)
(4.3)
Путем преобразований выражения (4.3) получим функцию неопределенности
(4.4) для одиночного ЛЧМ импульса:

Сечения тела неопределенности одиночного ЛЧМ импульса показаны на
рисунке 5:
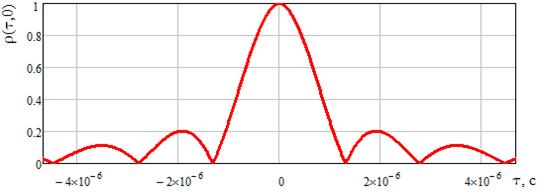
а)
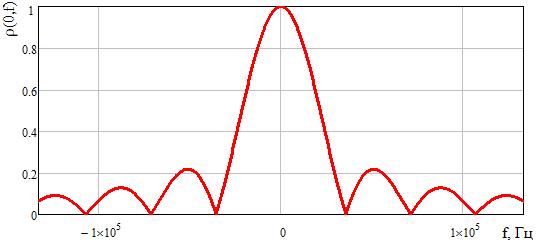
б)
Рисунок 5- Сечения тела неопределенности ЛЧМ импульса плоскостями f = 0(а) и τ = 0 (б)
На рисунке 6 представлено сечение тела неопределенности одиночного
импульса плоскостью по уровню 0,5.

Рисунок
6 - Сечение функции неопределенности одиночного ЛЧМ импульса плоскостью по
уровню 0,5
Выражение для функции рассогласования пачки из М импульсов:

Построим
сечения функции неопределенности для пачки из 4 импульсов плоскостями  и
и  (рисунок
7) и сечение плоскостью по уровню 0,5:
(рисунок
7) и сечение плоскостью по уровню 0,5:  (рисунок
8).
(рисунок
8).
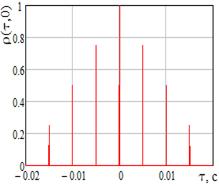

а) б)

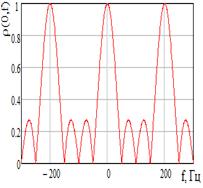
в) г)
Рисунок
7 - Сечения функции неопределенности для пачки из 4 импульсов плоскостями f = 0
(а, б) и (в, г)

Рисунок
8 - Сечения функции неопределенности для пачки из 4 импульсов по уровню 0,5
Из приведенных рисунков видно, что тело неопределенности пачки имеет
многолепестковый характер, что приводит к неоднозначности измерения времени
запаздывания сигнала и доплеровской частоты.
Диапазон однозначного измерения дальности:
 (4.7)
(4.7)
Сравнив результат (4.7) и (2.9), можно сделать вывод, что измерение
дальности до цели будет однозначным во всем дальностном диапазоне, так как
дальность действия радиолокатора меньше диапазон однозначного измерения.
Однозначность определения скорости определяется выражением:
 (4.8)
(4.8)
Неоднозначность в измерении доплеровской частоты можно снять за счет
априорных данных - реальных скоростей объектов. Уменьшение периода следования
импульсов приведет к расширению диапазона однозначного измерения скорости, при
этом диапазон однозначного измерения дальности уменьшиться. Можно уменьшать
период следования импульсов до тех пор, пока диапазон однозначного измерения
дальности не станет равным дальности действия радиолокатора.
Заключение
радиолокационный
станция антенна приемник
В ходе выполнения домашнего задания были рассчитаны разрешающие
способности заданного сигнала, точность измерения параметров сигнала, диапазоны
однозначного измерения и число каналов по дальности и скорости.
Список
используемой литературы
1. Курс
лекций по дисциплине «Теоретические основы радиолокации», преподаватель Нефедов
С.И.
2. Теоретические
основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для вузов. М.,
изд-во «Советское радио», 1970
. Баскаков
С.И. Радиотехнические цепи и сигналы. - М: Высшая школа, 2001.
. Информационные
технологии в радиотехнических системах: Учебное пособие. -2-е изд., перераб. и
доп./В.А. Васин, И.Б. Власов, Ю.М. Егоров и др.; Под ред. И.Б. Федорова. - М.:
Изд-во МГТУ им. Н.Э. Баумана, 204. - 768 с.: ил - (Информатика в техническом
университете).