Получение количественных оценок образования крупных айсбергов и взаимосвязи температуры воздуха Южного полушария
Содержание
Сокращения
Введение
. Айсберги
.1 Распределение и размеры
.2 Изучение размеров, повторяемости, появления и положения
антарктических айсбергов
. Методы исследования морских льдов
.1 Радиолокационные исследования за морской поверхностью
.2 Основы радиолокации
.3 Основные принципы функционирования РСА
.4 Назначение и построение РЛС с синтезированной апертурой
антенны
2.5 Дальность действия РЛС
.6 Радиолокаторы бокового обзора
. Определение площади айсберга по
данным РСА
.1 Статистический анализ динамики
антарктических айсбергов
Заключение
Список используемых источников
Приложения
Сокращения
НЛЦ - Национальный ледовый центр;
ИК-съемка - Инфракрасная съемка
АПП - Антарктический прибрежный поток
АОП - Антарктический околополюсный поток
ИСЗ - Искусственный спутник Земли
РЛС - Радиолокационная станция
РСА - Радиолокатор с синтезированной апертурой
ЛА - Летательный аппарат
РБО - Радиолокаторы бокового обзора
РЛИ - Радиолокационное изображение
УЭПР - Удельная эффективная площадь рассеивания
Введение
Ледяной покров - является важной физико-географической особенностью
полярных областей Мирового океана. Значительная пространственно-временная
изменчивость полярных льдов определяет необходимость их изучения как составной
части общей климатической системы нашей планеты и как основного природного
фактора, влияющего на деятельность человека в плане изучения и освоения
природных ресурсов полярных областей.
Южный океан представляет собой обширную физико-георгафическую область
Мирового Океана с самостоятельной системой циркуляции вод, характерной
структурой водных масс, системой зонального расположения фронтальных зон,
наличием дрейфующих морских льдов и айсбергов.
Основными структурными образованиями, составляющими ледяной покров Южного
океана, являются дрейфующие льды, айсберги, припай и полыньи, которые
характеризуются географическим положением и размерами, а также
пространственно-временной изменчивостью их основных параметров и элементов.
Целью данной работы являлось получение количественных оценок образования
крупных айсбергов и взаимосвязи температуры воздуха Южного полушария с
количеством крупных айсбергов и запасами воды в них, а так же вклад в тепловой
баланс характеристик теплоты таяния льда.
1. Айсберги
Поскольку в данной работе исследуемым объектом является айсберг, то
рассмотрим основные определения данной области.
Айсберг - это крупная монолитная глыба пресного льда, плавающая в море
или сидящая на мели в момент наблюдения. Может возвышаться над уровнем воды
более чем на 70-100 м и достигать длины 100 км и более. Под водой обычно
находится около 70-90 % объема айсберга. Как правило, айсберги образуются из
выводных и покровных ледников или шельфовых льдов. [1]
Айсберги выводных ледников имеют столообразную форму с слегка выпуклой
верхней поверхностью, которая расчленена различного вида неровностями и
трещинами, эти айсберги характерны для Южного океана.
Айсберги покровных ледников отличаются тем, что их верхняя поверхность
практически не бывает ровной. Она несколько наклонена, наподобие односкатной
крыши. Их размеры, по сравнению с другими видами айсбергов Южного океана,
наименьшие.
Айсберги шельфовых ледников имеют, как правило, значительные
горизонтальные размеры (десятки и даже сотни километров). Их высота в среднем
составляет 35-50 м. У них ровная горизонтальная поверхность, почти строго
вертикальные и ровные боковые стенки. [1]
1.1 Распределение и размеры
Современная северная граница Южного полушария распространения айсбергов
стабильна и близка к положению зоны антарктической конвергенции. Самое северное
положение айсберга (высотой 50 м, длиной 4000 м и шириной 700 м), в текущем
столетии из документально зарегистрированных источников, отмечено 27 декабря
1982 года на 49°30 юш и 40°20 зд. Кроме того, за последние 10 лет айсберги
длиной более 1500 м значительно чаще стали встречаться к северу от 65° юш.
Общее количество таких айсбергов за этот период составило 316. [1]
Вероятность встречаемости айсбергов, высота которых составляет 100-150 м,
менее 50%, длиной свыше 3000 м в прибрежной зоне не более 5% (см. приложение,
рисунок 1). Гигантские айсберги - редкое явление. Средняя длина айсбергов,
расположенных между берегом и 65° юш, равна 1090 м, к северу она уменьшается
почти в 2,5 раза и составляет 430 м. Изменения высоты надводной части
айсбергов, в зависимости от широты, весьма не значительны. Так, в прибрежной
зоне к югу от 65° юш, средняя высота айсбергов равна 50 м, а к северу - 48 м.
Среднее отношение ширины айсберга к их длине практически постоянно и равно 0,6.
Отношение надводной части айсбергов к подводной меняется более существенно и
зависит от формы айсбергов, и в среднем составляет 0,6 - 0,7. [1]
Плотность распределения айсбергов или их количество на 1000 км. (см.
приложение, рисунок 2), соответствует основным закономерностям циркуляции
атмосферы, поверхностных вод и льдов, их распределению, а также географическому
положению основных участков ледникового побережья Антарктиды, продуцирующих
айсберги.
Продолжительность существования айсбергов в антарктических водах, в
среднем составляет около 2 лет (при объеме айсбергового стока в океан 2,2
тыс.км./год и общем объеме их в океане 4,7 тыс.км3). [1]
.2 Изучение размеров, повторяемости, появления и положения антарктических
айсбергов
Изучение размеров, повторяемости, появления и положения антарктических айсбергов
помогают понять климатические изменения Южного ледяного континента Земли.
Антарктические айсберги регулярно формируются при отделении массивов льда от
ледяного шельфа и ледников. Для их регистрации НЛЦ США используются спутниковые
датчики, которые отслеживают значительные антарктические айсберги и их
положение приблизительно каждые 15-20 дней.
Согласно НЛЦ, число больших антарктических айсбергов
увеличилось в последние годы. Это увеличение может быть результатом
климатических изменений или же совершенствованием методов обнаружения и
регистрации айсбергов. Длительный анализ поведения айсбергов основан, как
правило, на данных, полученных с помощью радиометров и скаттерометров. [2]
Антарктические айсберги регистрируются НЛЦ США, когда
они удовлетворяют трем основным требованиям. Во-первых - наибольший размер
должен составлять, по крайней мере, 10 км. Во-вторых - присутствие айсберга
должно быть отмечено в течение последних 30 суток. Если айсберг не был
обнаружен, его не наносят на карту за предыдущую неделю. В-третьих -
отслеживается положение айсбергов южнее 60º юш. Исключение составляют айсберги,
не отмеченные дольше 30 суток, когда они находятся на мели или движутся в
дрейфующем льду. Кроме того, если исходный размер айсберга был 10 км или
больше, а затем айсберг раскололся на две или более частей, продолжается
отслеживание айсберга до тех пор, пока позволяет разрешение спутникового
регистратора. Название айсберга дается в соответствии с сектором Антарктики, в
котором он был впервые обнаружен.
· Сектор A: 0º - 90º зд;
· Сектор B: 90º зд - 180º;
· Сектор C: 180º - 90º вд;
· Сектор D: 90º вд - 0º.
Каждому айсбергу присваивается индекс в соответствии
местом, где он был впервые обнаружен. Индекс содержит букву сектора, а также
порядковый номер. Например, айсберг В-15 - это 15-ый айсберг,
зарегистрированный НЛЦ в Антарктике в секторе В между меридианами 90º
зд и 180º.
При разломах имеющего
индекс айсберга его части получают название, в котором к индексу исходного
айсберга добавляется буква, указывающая порядковый номер обломка. Например: при
разломе В-15 на три части, новые айсберги получают индексы В-15A (к индексу
исходного айсберга добавляется первая буква алфавита), затем В-15B и В-15C. [2]
Распределение размеров Антарктических айсбергов, о
которых сообщает НЛЦ с 1976 года, показывают, что большинство айсбергов,
отслеженных НЛЦ, располагается в размере от 50 до 600 квадратных навигационных
миль. В среднем размер айсбергов, отслеженных НЛЦ, не более чем 44 квадратных
навигационных мили. Наибольший айсберг когда-либо отслеженный - айсберг B15,
который был равен 3 155 квадратными навигационными милями в марте 2000.
Предполагается, что из-за огромного размера, айсберги составляют огромное
большинство ледникового льда, прибывающего из Антарктиды. [2]
Большинство Антарктических айсбергов рождается от
Шельфовых ленников Ронна, Фильхнера, Ларсена и Росса (см. приложение, рисунок
3). Наибольшая группа айсбергов, о которых сообщает НЛЦ, прибыла из Моря
Уэдделла. Эти айсберги откололись или от Шельфовых ленников Рона, Фильхнера и
Ларсена, и затем путешествуют на севере, между 20° сш и к 50° зд - “Переулок
Айсберга”. Вторая по величине группа айсбергов, расположена в Море Росса. Эти
айсберги рождаются из Шельфового ледника Росса и с запада путешествуют по
Антарктическому побережью, которое несет АПП. Многие из этих айсбергов, в
конечном счете, достигают Моря Уэдделла и затем путешествуют на север через
“Переулок Айсберга”. Некоторые айсберги, путешествующие на запад с АПП, текущим
на север около 0° зд, становятся пойманными АОП, путешествующим на
северо-восток. Другие айсберги в Море Росса путешествуют на север, пока не
будут пойманы в АОП и затем они перемещаются на восток через Пролив Дрейка,
заканчивая своё путешествие в “Переулке Айсберга”.[1]
2.
Методы исследования морских льдов
Существует несколько методов исследования морских льдов:
· визуальные исследования;
· ИК-съемка снежно-ледяной поверхности;
· лазерное профилирование льда;
· микроволновая радиометрия морского снежно-ледяного покрова;
· радиолокационные исследования;
· аэрокосмические методы исследования морских льдов.
Рассмотрим каждый метод в отдельном порядке:
айсберг
радиолокационный станция антенна
2.1
Радиолокационные исследования за морской поверхностью
Для примера разберем радиолокационный метод исследования, тк этот метод
лежит в основе обнаружении и регистрации айсбергов НЛЦ США, данные которого,
использовались в данной работе.
Радиолокационные исследования - это исследования толщины, строения и
физических свойств ледяного покрова по параметрам отраженных и рассеянных
электромагнитных волн поверхностями раздела льда с окружающими средами (водой,
воздухом...) и его толщей. По полученным на пленках электрического
фоторегистрирующего устройства радиолокационным изображениям определяются
размеры и форма ледяных образований и элементов, сплоченность и распределение
льдов, количество и ориентация трещин и каналов, разводий и полыней, а при
повторной съемке - деформация ледяного покрова, скорость и направление дрейфа
льдов.
.2 Основы радиолокации
Определение координат цели радаром производится с учетом выбранной
системы координат. Выбор той или иной системы координат связан со сферой
применения радиолокационной установки. Например, наземная РЛС наблюдения за
воздушной обстановкой измеряет три координаты цели: азимут, угол места и
наклонную дальность. РЛС такого типа используются на аэродромах . Работает эта
станция в сферической системе координат.
Существует единственное существенное ограничение применения радаров в
целях сверхдальних наблюдений - это ослабление сигнала. Если сигнал проходит
большое расстояние, то он частично рассеивается, искажается и ослабевает и
выделить его в приемнике из собственных шумов приемника и шумов иного
происхождения зачастую крайне затруднительно. Ослабление сигнала при
радиолокации вполне поддается расчету, который основан на простых физических
соображениях. Если в какой- то точке излучается мощность Р, то поток мощности
через единичную площадку, находящуюся на расстоянии R, будет пропорционален
Р/4(R^2). В знаменателе стоит площадь сферы радиусом R, окружающей источник.
Таким образом, при обычной радиосвязи мощность, принятая антенной, обратно
пропорциональна квадрату расстояния. Этот закон - закон сферической
расходимости пучка энергии - выполняется всегда при распространении волн в
свободном пространстве. Даже если сконцентрировать излучаемую мощность в узкий
луч и поток энергии возрастет в несколько раз (этот коэффициент называется
коэффициентом направленного действия антенны), квадратичная зависимость от
расстояния сохранится. Но в радиолокации радиосигнал преодолевает двойные
расстояния, а сама облучаемая цель рассеивает энергию по всем направлениям , и
если облучающий цель поток энергии ослабевает обратно пропорционально R^2 то
приходящий к приемнику рассеянный поток еще ослабляется во столько же раз и
оказывается обратно пропорциональным R^4. Это означает, что для повышения
дальности действия РЛС в два раза, при прочих равных условиях, мощность ее
передатчика надо повысить в 16 раз. Столь высокой ценой достигаются высокие
характеристики современных РЛС.
2.3 Основные принципы функционирования РСА
Радиолокационные станции с синтезированной апертурой собирают информацию
о поверхности Земли путем измерения и обработки отраженных ею сигналов в
СВЧ-диапазоне и тем самым расширяют возможности изучения свойств поверхности
Земли в некотором новом направлении. Кроме того, поскольку такие системы
используют свою собственную энергию излучения и работают на относительно
длинных волнах, они способны выполнять съемку поверхности круглосуточно и в
любую погоду.
Разрешающая способность изображения в пассивных датчиках равна их угловой
разрешающей способности (т.е. количеству длин волн, приходящихся на размер
апертуры), умноженной на расстояние между датчиком и исследуемым участком или
объектом. Таким образом, размер элемента разрешения прямо пропорционален длине
волны излучения и высоте расположения датчика и обратно пропорционален размеру
апертуры. При наблюдении с орбиты ИСЗ в оптическом и ИК-диапазонах достигается
очень высокое разрешение при сравнительно умеренных размерах апертуры, что
обусловлено малой длинной рабочих волн. В диапазоне СВЧ длины волн относительно
велики, и для достижения высокого разрешения (не более десятков метров)
требуется апертуры размерами порядка сотен метров и даже километров. Получить
реально такие апертуры в настоящее время, разумеется, невозможно.
В радиолокационных системах с синтезированной апертурой указанные
трудности преодолеваются за счет использования когерентных РЛС измерять
расстояние и доплеровские частоты, что позволяет получить изображение
поверхности с высоким разрешением при наблюдении с орбиты. Две соседние цели
разрешаются благодаря различиям во временных задержках отраженных сигналов и в
доплеровских частотах, изменяющихся во времени, причем эти различия не зависят
от расстояния до цели. Таким образом, разрешающая способность РСА не зависит от
высоты их расположения. Такое уникальное достоинство сопровождается, правда,
появлением некоторых ограничений на ширину полосы обзора, размер антенны и
требуемую мощность излучения.
Поскольку в РСА для достижения высокого разрешения по одной из
пространственных координат используется зависимость доплеровской частоты от
времени, каждый элемент изображения формируется в результате обработки большого
количества последовательных отраженных сигналов, что при формировании полного
изображения приводит к большому числу арифметических операций. Сложность и
объем арифметических операций находятся еще за пределами возможностей
современных процессоров, работающих в реальном времени. Разборка цифровых
процессов для космических РСА представляет собой многообещающую и интенсивно
развивающуюся область исследований.
Для повышения эффективности использования информации, содержащейся в
полученном радиолокационном изображении, прибегают к ряду операций обработки
данных после формирования радиолокационного изображения. К таким операциям
относятся, в частности, сопоставление (registration) радиолокационного изображения с
изображениями, полученными многозональными и ИК-датчиками, автоматический
анализ текстуры, статический анализ шума зернистости.
В радиолокационном методе синтезирования апертуры, для того чтобы получить
изображение облучаемой поверхности Земли с высоким разрешением, используется
одновременно информация о доплеровских частотах в отраженных сигналах и
информация о времени задержки сигналов на дальность до цели. Обычно РЛС
осуществляет обзор поверхности в боковом направлении с одной стороны от
траектории движения летательного аппарата - носителя РСА (перпендикулярно его
траектории), что необходимо для исключения неоднозначности получаемых данных,
относящихся к левой и правой сторонам зоны обзора. При этом РЛС излучает
короткие когерентные импульсы электромагнитных колебаний по направлению к
поверхности Земли. Геометрическое место точек, равноудаленных от РЛС,
представляет собой концентрические сферы. Пересечение сфер с ровной (гладкой)
поверхностью образует набор концентрических окружностей с общим центром в точке
надир.
Сигналы, отраженные от объектов, расположенных на окружности, имеют
вполне определенное время запаздывания, но различные доплеровские частоты. В
свою очередь точки, расположенные на поверхности коаксиальных конусов, ось
которых совпадает с линией полета, а вершина соответствует положению РЛС, дают
одинаковые значения доплеровских частот в отраженных сигналах, но различные
времена запаздывания. Пересечением этих конус с ровной поверхностью образуется
семейство гипербол. Объекты на поверхности Земли, расположенные вдоль
гиперболы, создают отраженные сигналы с одинаковыми значениями доплеровских
частот. Таким образом, если одновременно обрабатывать отраженные сигналы,
которые содержат информацию о времени задержки и доплеровской частоте, то на
поверхности Земли можно нанести условную координатную сетку в виде
концентрических окружностей и кофокальных гипербол и каждую точку на
поверхности однозначно определить конкретной величиной задержки и доплеровской
частоты. Яркость каждого разрешаемого элемента радиолокационного изображения
пропорциональна энергии отраженного сигнала в элементах разрешения по
доплеровской частоте и временной задержке, соответствующих определенной точке
на отображаемой поверхности. Разрешающая способность такой системы съемки
зависит, следовательно, от точности измерения разности времен запаздывания
сигналов и разности доплеровских частот, соответствующих двум соседним точкам
на отображаемой поверхности.
В действительности ситуация несколько сложнее. РЛС изучает импульсные
сигналы, с тем чтобы получить информацию о запаздывании отражений. Для того
чтобы иметь однозначную информацию о доплеровских частотах, требуется
зондировать поверхность Земли большим количеством импульсов с частотой
повторения, удовлетворяющей теореме отсчетов Найквиста, и принимать
соответствующие отраженные сигналы. При перемещении носителя РЛС над
определенным участком поверхности Земли поступают отраженные сигналы, которые
содержат интересующие нас измерения доплеровской частоты и расстояния во
времени для всех точек поверхности, облучаемой РЛС. Эти временные
последовательности затем обрабатываются для однозначной идентификации каждой
точки поверхности и в конечном счете для формирования полного радиолокационного
изображения. Вот почему формирование каждого элемента радиолокационного
изображения требует очень большого количества вычислительных операций. В
оптических же датчиках ситуация иная. Проще говоря, в радиолокационной системе
на первом этапе формируется эквивалент голограммы поверхности, а затем
требуется последующая обработка голограммы для создания радиолокационного
изображения. Такую обработку можно выполнить или оптически, или цифровыми
методами.
Одна из характерных особенностей РСА для космической съемки поверхности -
независимость разрешающей способности от высоты носителя РСА. Это обусловлено
тем, что изображение формируется за счет использования изменений доплеровских
частот во времени и разности времени запаздывания сигналов, т.е. параметров,
которые не зависят от расстояния между РСА и отображаемой поверхностью. Такая
уникальная особенность РСА позволяет получать радиолокационные изображения с
высоким разрешением при орбитальных высотах, если, конечно, уровень принимаемых
сигналов достаточно превышает уровень шума.
В настоящее время в оперативном режиме функционируют РСА, установленные
на спутниках ERS-2 и ENVISAT Европейского космического агентства и на спутнике RADARSAT Канадского космического агентства.
Наиболее распространенными бортовыми космическими РЛС являются системы,
построенные по принципам РЛС бокового обзора и РЛС с синтезированной апертурой,
исходя из методов задач применения каждого вида, РЛС имеются определенные
недостатки и преимущества в оперативности получения данных, их объеме,
достижение разрешающей способности и обеспечение полосы обзора в заданном
районе проведения радиолокационного контроля. РЛС бокового обзора при
относительно низкой разрешающей способности (от нескольких километров до сотни
метров) позволяют получить большие полосы обзора при одном пролете космического
аппарата. РЛС с синтезированной апертурой позволяют при достаточно широкой
полосе обзора (сотни километров) получать данные при относительно узкой зоне
обзора с высокой разрешающей способностью (от десятков до нескольких метров).
.4 Назначение и построение РЛС с синтезированной апертурой антенны
Синтезирование апертуры представляет собой технический прием, позволяющий
существенно повысить разрешающую способность радиолокатора в поперечном
относительно направления полета направлении и получить детальное изображение
радиолокационной карты местности, над которой совершает полет ЛА. Режим
формирования такой карты называется картографированием и применяется, например,
в обзорно-сравнительных навигационных системах, для получения карт местности, и
в других ситуациях. По качеству и детальности такие карты сравнимы с
аэрофотоснимками, но в отличие от последних могут быть получёны при отсутствии
оптической видимости земной поверхности (при полете, над облаками). Детальность
радиолокационного изображения зависит от линейной разрешающей способности
радиолокатора. В радиальном по отношению к радиолокатору направлении линейная
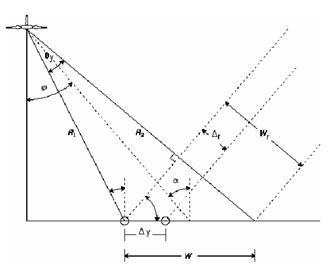
разрешающая способность, т. е. разрешающая способность по дальности δR, определяется зондирующим сигналом,
а в поперечном направлении (тангенциальная разрешающая способность) δl - шириной ДНА радиолокатора и
расстоянием до цели (рисунок 2.1) [3, 5]. Детальность радиолокационного
изображения местности тем выше, чем меньше δR и δl.

Рисунок 2.1 Параметры, характеризующие детальность радиолокационного
изображения
Рисунок 2.2 Диаграммы направленности радиолокатора бокового обзора
Задача уменьшения HR
решается использованием зондирующих сигналов с малой длительностью импульсов
или переходом к сложным сигналам (частотно-модулированным или
фазоманипулированным). Однако уменьшения δl добиться не так просто. так как δl пропорциональна дальности R до цели и ширине ДНА, а в
горизонтальной плоскости  , где λ- длина волны, а αа - продольный размер (длина).
Основными путями повышения тангенциальной разрешающей способности являются
применение в радиолокаторах вдоль фюзеляжных антенн и синтезирование апертуры
антенны при движении ЛА.
, где λ- длина волны, а αа - продольный размер (длина).
Основными путями повышения тангенциальной разрешающей способности являются
применение в радиолокаторах вдоль фюзеляжных антенн и синтезирование апертуры
антенны при движении ЛА.
Первый путь привел к разработке так называемых радиолокаторов бокового
обзора (рисунок 2.2). В таких радиолокаторах тангенциальная разрешающая
способность  тем выше, чем больше продольный размер dф фюзеляжа ЛА. Поскольку lф больше диаметра фюзеляжа dф, от которого зависит обычно размер
антенны da, то
тем выше, чем больше продольный размер dф фюзеляжа ЛА. Поскольку lф больше диаметра фюзеляжа dф, от которого зависит обычно размер
антенны da, то  и детальность изображения в
радиолокаторах с вдольфюзеляжными антеннами улучшается, хотя зависимость от
дальности сохраняется.
и детальность изображения в
радиолокаторах с вдольфюзеляжными антеннами улучшается, хотя зависимость от
дальности сохраняется.
Второй, более радикальный путь приводит к РСА при поступательном движении
ЛА.
Принцип синтезирования апертуры. Пусть линейная ФАР размером (апертурой) L (рисунок 2.3, а) состоит из N+1 излучателей. Суммируя принятые
облучателями сигналы, можно в каждый момент времени получать диаграмму ФАР с
шириной  [5]. Если для обеспечения заданной φа требуется
[5]. Если для обеспечения заданной φа требуется  , то можно синтезировать ФАР,
последовательно перемещая один излучатель вдоль этой апертуры с некоторой
скоростью V, принимая отраженные от цели
сигналы, запоминая их, а затем совместно обрабатывая (рисунок 3,6). При этом
синтезируется апертура линейной антенны с эффективным размером L и ДНА шириной φс=λ/L однако увеличиваются затраты времени
на синтезирование tc = L/V и усложняется аппаратура радиолокатора.
, то можно синтезировать ФАР,
последовательно перемещая один излучатель вдоль этой апертуры с некоторой
скоростью V, принимая отраженные от цели
сигналы, запоминая их, а затем совместно обрабатывая (рисунок 3,6). При этом
синтезируется апертура линейной антенны с эффективным размером L и ДНА шириной φс=λ/L однако увеличиваются затраты времени
на синтезирование tc = L/V и усложняется аппаратура радиолокатора.
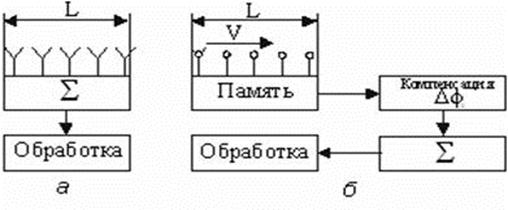
Рисунок 2.3 Фазированная антенная решетка (а) и схема синтезирования
апертуры при перемещении облучателя (б)
Пусть ЛА движется на некоторой высоте с постоянной скоростью V прямолинейно и параллельно земной
поверхности (рисунок 2.4).
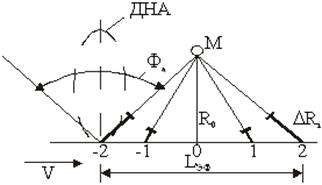
Рисунок 2.4 Взаимное положение цели и ЛА при синтезировании апертуры.
Антенна, имеющая ДНА шириной φа и повернутая на 90° к линии пути,
последовательно проходит ряд положений i = -N/2;
...; -2; -1; 0; +1; +2; . . . +N/2, в
которых принимает сигналы, отраженные от цели, находящейся в точке М на земной
поверхности. При различных положениях антенны (при различных i) сигналы от одной и той же точки
проходят разные расстояния  , что приводит к изменению фазовых сдвигов этих сигналов,
вызываемых разностью хода сигналов R. Поскольку сигнал проходит R дважды; в направлении цели и от нее, то два сигнала,
принятые при соседних положениях антенны, отличаются по фазе на:
, что приводит к изменению фазовых сдвигов этих сигналов,
вызываемых разностью хода сигналов R. Поскольку сигнал проходит R дважды; в направлении цели и от нее, то два сигнала,
принятые при соседних положениях антенны, отличаются по фазе на:
 (1)
(1)
В зависимости от того, компенсируются или нет при суммировании сигналов
фазовые набеги Δφ на отрезках ΔRi, различают фокусированные и
нефокусированные РСА. В первом случае обработка сводится к перемещению антенн,
запоминанию сигналов, компенсации фазовых набегов и суммированию сигналов (см.
рисунок 2.3, б) [4], а во втором - к тем же операциям, но без компенсации
фазовых набегов.
Структурная схема РСА. Основу РСА составляют когерентноимпульсные
радиолокаторы, построенные по схеме с внутренней когерентностью (рисунок 2.5).
Когерентный генератор КГ на частоте fп.ч служит для формирования в однополосном модуляторе зондирующего
сигнала с частотой fо+fп.ч. Источником колебаний с частотой fо является ГРЧ [4]. Зондирующий
сигнал модулируется импульсной последовательностью с модулятора М. Усилитель
мощности УМ представляет собой оконечный каскад передатчика. Обработка сигналов
(запоминание, компенсация фаз, суммирование) обычно выполняется на низкой
частоте. Поэтому в схеме предусматривают квадратурные каналы, каждый из которых
начинается с соответствующего фазового детектора. Источником опорного
напряжения для фазовых детекторов служит когерентный гетеродин КГ. Сигналы квадратурных
каналов (сохраняющих информацию о фазе) подаются либо на устройство аналоговой
записи УЗ, либо на устройство обработки в реальном масштабе времени УОС.
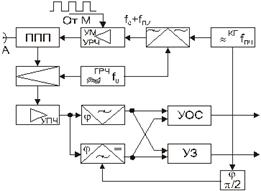
Рисунок 2.5 Структурная схема радиолокатора с синтезированием апертуры
Принципы обработки сигналов в РСА. При любом виде обработки необходимо
покадровое запоминание информации о целях. Размеры кадра задаются по азимуту
эффективным значением синтезируемой апертуры LЭф и дальностью обзора Rmin . . . Rmax
(рисунок 2.6, а). Поскольку принимаемые при каждом положении антенны сигналы
поступают на вход приемника с просматриваемой дистанции последовательно во
времени, то и записываются они последовательно в каждый из N+1 азимутальных каналов, что условно
показано стрелками на рисунке 2.6, б. При этом формируется соответствующий
участку местности кадр изображения с размерами хк и Rx. Получить информацию-j6 угловом положении цели, т. е. о координате х, при
синтезировании апертуры можно только при анализе отраженных от этой цели
сигналов, записанных на интервале синтезирования LЭф. Поэтому информация с устройства записи считывается
последовательно в каждом из п каналов дальности (рисунок 2.6, в).
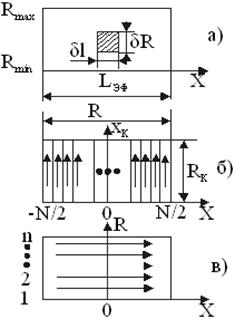
Рисунок 2.6 Запоминаемый кадр местности (а), диаграммы записи (б) и
считывания (в) сигналов
2.5 Дальность действия РЛС
Радиолокационное наблюдение, обнаружение целей и
измерение параметров, характеризующих физические свойства этих целей, возможны,
если мощность отраженного сигнала Рпр на выходе приемника РЛС не меньше
некоторого порогового уровня Рпр min.
Величина Рпр min, характеризующая чувствительность
приемника РЛС, зависит от вида и интенсивности помех на входе приемника,
надежности обнаружения целей и точности измерения их параметров.
Максимальная дальность до цели Rmax, при которой еще выполняется условие
Рпр ≥ Рпр min, называется
дальностью радиолокационного наблюдения. Величина Rmax зависит как от чувствительности приемника Рпр min, так и от ряда других факторов:
мощности излучаемых сигналов, эффективной площади рассеяния цели,
направленности антенны, затухания электромагнитных волн в атмосфере и др.
При наблюдении цели с ЭПР σц в свободном пространстве на вход
приемника РЛС, согласованного с антенной, поступает отраженный сигнал, мощность
которого
 (2)
(2)
где
 - мощность излучаемых колебаний;
- мощность излучаемых колебаний;
 -
коэффициент направленного действия передающей антенны;
-
коэффициент направленного действия передающей антенны;
 -
эффективная площадь приемной антенны.
-
эффективная площадь приемной антенны.
Если
учесть связь между эффективной площадью приёмной антенны и её коэффициентом
усиления по мощности, примерно равным коэффициенту направленного действия  , то принимаемую мощность можно представить как
, то принимаемую мощность можно представить как
 (3)
(3)
Отсюда определяется максимальная дальность
радиолокационного наблюдения рассматриваемой цели:
 (4)
(4)
В
случаях, когда в РЛС для приема и передачи используется одна и та же антенна, =  =D и
уравнение (4) принимает вид:
=D и
уравнение (4) принимает вид:
 (5)
(5)
Проинтегрировав,
правые и левые части равенства (3) за время длительности сигналов, перейдем к
соотношению, связывающему энергию принимаемого сигнала Эпр с энергией
зондирующего сигнала ЭΣ:
 (6)
(6)
Соответственно
этому уравнение дальности радиолокационного наблюдения (5) принимает вид
 (7)
(7)
где
 - минимально допустимая энергия принимаемого сигнала.
- минимально допустимая энергия принимаемого сигнала.
Величину
можно выразить через спектральную плотность шума N0,
приведенного ко входу приемника, и коэффициент различимости mp, а
именно = mpN0, Коэффициент mp=/N0 представляет собой пороговое отношение сигнал/шум,
при котором обеспечивается заданная достоверность радиолокационного наблюдения.
Если
электромагнитные волны распространяются в среде с потерями, то максимальная
дальность наблюдения определяется уравнением(8)
 (8)
(8)
где
α(R)
-коэффициент ослабления, который в общем случае может меняться вдоль трассы РЛС
- цель и является функцией текущих координат точки на этой трассе.
В
радиолокационных системах исследования Земли объектом наблюдения обычно
являются распределенные цели, ЭПР которых зависит от условий наблюдения и
параметров РЛС. При обзоре поверхности ЭПР выражается через удельную ЭПР σ° и площадь разрешаемого элемента θRτиc/2. Поэтому уравнение (3) можно представить как
 (9)
(9)
В
это уравнение входят два связанных между собой параметра антенны - ширина луча θ и эффективная площадь А. Полагая А=kadгdв,
где dг, dв - горизонтальный и вертикальный размеры антенны; kа -
коэффициент, учитывающий форму раскрыва антенны и его эффективность, получаем
 (10)
(10)
Сравнивая это выражение с формулой (3) для сосредоточенной цели,
замечаем, что мощность сигнала пропорциональна расстоянию в третьей степени, а
не в четвертой. Сигнал в большей степени зависит от вертикального размера
антенны, чем от горизонтального.
Эффективную
площадь объемной цели можно выразить через удельную ЭПР и разрешаемый объем  , где Ωa=4π/D - телесный угол антенного луча.
После подстановки получаем
, где Ωa=4π/D - телесный угол антенного луча.
После подстановки получаем
 (11)
(11)
Как
видно, для объемной цели мощность отраженного сигнала зависит от расстояния в
квадрате и от площади антенны (или коэффициента направленного действия). Это
уравнение можно записать иначе, разделив мощность принимаемого сигнала на
мощность шумов приемника и выразив это отношение через отражаемость Z:
 (12)
(12)
Пм
=  (13)
(13)
Коэффициент
называемый метеорологическим потенциалом РЛС, связывает параметры РЛС и
множитель km/λ4, характеризующий рассеяние элементарных отражателей
по закону Релея. Этот коэффициент используется для определения отражаемости
метеорологических объектов по результатам радиолокационных наблюдений.
Основные
параметры и характеристики РЛС определяют возможности получения
радиолокационной информации и выбор метода использования бортовых космических
РЛС исходя из конкретных задач поставленных для радиолокационных наблюдений в
конкретном районе проводки судов или проведения полевых научных
исследовательских работ. Оценка дальности действия РЛС позволяет выбрать
необходимый виток пролета космического аппарата с требуемой зоной и полосой
обзора в заданном районе проведения радиолокационного ледового контроля.
Радиолокаторы бокового обзора являются естественной модификацией
импульсных РЛС кругового обзора при размещении их на ЛА. В отличии от РЛС
кругового обзора РБО неподвижна относительно корпуса ЛА и развёртка
радиолокационного изображения поверхности Земли обеспечивается движением ЛА.
Радиолокационное изображение, облучаемой поверхности Земли формируется из
амплитуды переотражённых в обратном направлении зондирующих импульсов РЛС и
является модулем комплексного коэффициента обратного рассеяния поверхности
Земли. Каждый отражённый импульс является строчкой дискретного РЛИ, столбцами,
которого являются отчёты отражённых импульсов.
Размер РЛИ (или полоса захвата РБО) по оси Y определяется шириной диаграммы направленности антенны РБО в
этом сечении - θy, углом места φ, и высотой ЛА - h (см. рисунок 2.7). В предположении
плоской отражающий поверхности:
 (14)
(14)
Рисунок
2.7 Принципы построения РСА.
Очевидно,
что размер РЛИ вдоль оси X ограничен только временем работы РЛС.
Линейная
разрешающая способность по азимуту РБО (вдоль оси Х) характеризует возможность
различения на РЛИ двух близкорасположенных точечных целей, и определяется
шириной диаграммы направленности антенны в сечении азимута и наклонной
дальностью до цели:
 (15)
(15)
Разрешающая
способность РБО по наклонной дальности определяется только типом зондирующего
сигнала и при использовании простого радиоимпульса равна Δr=cδτ/2, а при использовании сложных сигналов определяется
эффективной полосой частот сигнала, т.е. Δr=c/Δfэ2. [4]
Для
решения задачи формирования радиолокационного изображения с заданным качеством
важную роль играет разрешающая способность РБО по поверхностной дальности (см.
рисунок. 2.8), которая зависит от угла падания α, и для плоской поверхности равна  .:
.:
 (16)
(16)
Рисунок
2.8 Разрешающая способность по наклонной и поверхностной дальности
Данная
зависимость показывает, что разрешающая способность РБО по поверхностной
дальности резко падает при малых углах места, поэтому РБО обычно работают при
углах места > 10°.
Увеличение
разрешающей способности РБО по дальности обеспечивается использованием более
широкополосных зондирующих сигналов и легко достижимо, в тоже время увеличение
разрешающей способности по азимуту требует увеличения отношения длины антенны к
длине волны до величины, сравнимой с расстоянием до цели, что, как правило
сопряжено с большими техническими проблемами.
Альтернативный
путь резкого увеличения азимутальной разрешающей способности РБО без увеличения
размеров реальной антенны - использование метода синтезирования апертуры
антенны, которая обеспечивает практически неограниченной увеличение отношение Dx/λ, за счёт использования специальной пространственно-временной обработки
отражённых сигналов.
3.
Определение площади айсберга по данным РСА
Для
статистического анализа динамики антарктических айсбергов использовались данные
НЛЦ США. Они представляют собой: название айсберга, год и номер дня его
регистрации, долготу и широту и площадь айсберга в километрах.
Площадь
айсбергов оценивалась по величине Удельной эффективной площади рассеивания,
которая для айсбергов практически в течение всего года выше, чем у окружающих
льдов и поверхности океана.
Для
примера возьмем район 77º
55 юш и 166º 40 вд моря Росса в зоне действия станции МакМердо (США) с
изображением айсберга В-15А.
Все
построения и расчеты были сделаны пакетом ScanMagic, который создан с
использованием новейших эффективных технологий обработки изображений.
Рассмотрим сечение поверхности айсберга и ледового покрова с целью
определения неоднородностей поверхности и его границ. На рисунке 3.1
представлено, каким образом строятся сечения вдоль основной оси айсберга.
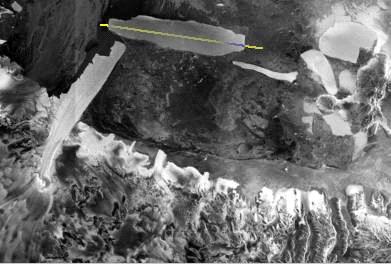
Рисунок 3.1 Построение сечений вдоль основной оси айсберга В-15А
На рисунке 3.2 представлены сечения по основной оси айсберга. Пунктирная
линия показывает минимальное значение рассеянного излучения от поверхности
айсберга. А максимальное значение определяется пиковым значением на границах
айсберга и автоматически указывается программой (см. красный кружочек).

Рисунок 3.2 Характеристики рассеянного микроволнового излучения от
поверхности айсберга В-15А
После определения максимальных и минимальных значений рассеянного
излучения от поверхности айсберга, которые необходимы при коррекции
изображений, а также при визуализации и коррекции гистограммы изображения, эти
значения откладываются на гистограмме коррекции изображения, в результате чего
можно визуально выделить айсберг, материковый лед и области со свободной водой.
На рисунке 3.3 представлена гистограмма выделенного участка изображения, на
которой отложены по оси OY
максимальные и минимальные значения излучения от поверхности айсберга. Также
для более наглядного представления данных необходимо применить эквализацию к
изображению. В результате чего выполняется модифицирование значений всех
пикселей в пределах текущего радиометрического диапазона с проведением
контрастирования изображения. На рисунке 3.3 устанавливаются максимальные и
минимальные границы диапазона линейного контрастирования для исходной
гистограммы, которые соответствуют максимальным и минимальным значениям
рассеянного излучения, определённые на рисунке 3.2.
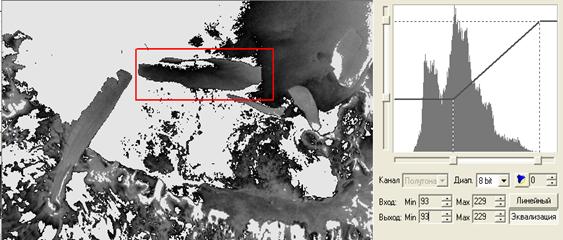
Рисунок 3.3 Отконтрастированное изображение айсберга В-15А
На гистограмме видно, что максимальные и минимальные значения рассеянного
микроволнового излучения от поверхности айсберга, отложены не совсем верно.
Поскольку эти значения определялись только по одному построенному сечению вдоль
основной оси айсберга, поэтому только для этого сечения значения являются
истинными, в то время как сама поверхность айсберга имеет куда более меньшие и
большие яркости пикселей. Поэтому необходимо построить дополнительные разрезу и
сечения, опираясь на знание того, что чем ярче область, тем меньше значение
излучения.
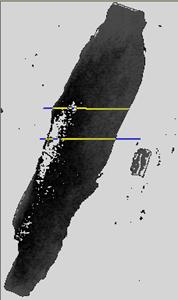
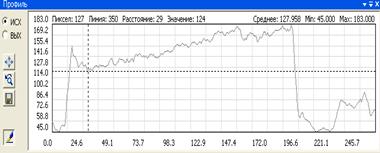

Рисунок 3.4 Построение дополнительных сечений для определения точных
максимальных и минимальных значений рассеянного микроволнового излучения от
поверхности айсберга В-15А
В результате, снимаются точные значения яркостей пикселей, относящихся к
айсбергу, перестраивается гистограмма и получается новое изображение (рисунок
3.5).
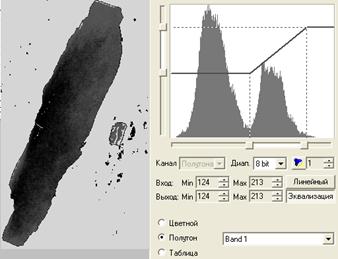
Рисунок 3.5 Построение новой гистограммы
Таким образом, были определены границы изменений яркости пикселей в
пределах поверхности айсберга. Теперь, посчитав количество этих пикселей, можно
оценить площадь айсберга по данным РСА.
Этот принцип положен в основу расчетов НЛЦ, все последующие расчеты будут
справедливы только для столообразных айсбергов, которые образуются в Южном
полушарии.
3.1 Статистический анализ динамики антарктических
айсбергов
Для анализа динамики площадь крупных столообразных антарктических
айсбергов была приведена к объему льда и к объему воды при их таянии по
соотношениям, полученным из эмпирических выражений А.А.Романова (2):
V(льда)
= S(льда) * 0.12 и V(воды) = V(льда) * 0.93
Рисунок 3.6 Графики изменения количества крупных айсбергов и запасов воды
в них с 1978 по 2007 гг.
На рисунке 3.6 видно, что при увеличении числа айсбергов, не всегда
наблюдается увеличение запаса воды в них. Это связано с тем, что в некоторые
года было зарегистрировано большое число мелких айсбергов, следовательно, объем
воды привносимый из Южного полушария будет небольшим. И наоборот, регистрация
больших по площади айсбергов дает значительный рост привносимой воды из Южного
полушария.
Рисунок 3.7 Графики изменения запасов воды крупных айсбергов и
температуры воздуха Южного полушария с 1978 по 2007 гг.
Также была построена взаимнокорреляционная функция между изменением
запасов воды в крупных айсбергах и температуры воздуха Южного полушария,
коэффициент взаимной корреляции равен 0,738 - он значим (значимость проверялась
по критерию Стьюдента), это говорит о том, что существует связь между
изменением температуры воздуха Южного полушария и изменением объема воды в
крупных айсбергах.
На рисунке 3.7 представлен график изменения запасов
воды крупных айсбергов и температуры воздуха Южного полушария с 1978 по 2007
гг. На графике не трудно увидеть, что заблаговременность составляет примерно
3-4 года. При резком увеличении температуры воздуха Южного полушария, через 3-4
года наблюдается рост приносимой воды из Южного полушария в мировой океан. Эта
связь чувствительна только к резкому и большому перепаду температуры в
положительную сторону, при незначительных изменениях температуры, изменения
привносимого объема воды незначительно.
Через температуру можно ввести показатель потока тепла
для оценки теплообмена через поверхность океана с нижележащими слоями и
изменением тепловых свойств поверхностных вод.
Данные об объеме крупных айсбергов позволяют оценить количество тепла,
расходуемое на его таяние, как в течение года, так и до полного таяния
айсберга. От исходного размера айсберга зависит объем льда и количество воды,
которое перешло из твердой фазы в жидкую. Эта составляющая теплового баланса
должна учитываться при анализе процессов в верхнем слое океана в Антарктическом
регионе.
Заключение
В ходе данной работы была дана фактическая оценка взаимосвязи температуры
воздуха Южного полушария с количеством крупных айсбергов и запасами воды в них:
с увеличением фактической температуры Южного океана, реакция шельфа Антарктики
происходит в виде увеличении числа крупных айсбергов с заблаговременностью 2
года. Тогда как количество воды, из-за неравномерного стаивания айсбергов,
связано с температурой Южного полушария хуже, вследствие того, что реагирование
на изменение температуры происходит по-разному.
Через температуру можно ввести показатель потока тепла
для оценки теплообмена через поверхность океана с нижележащими слоями и
изменением тепловых свойств поверхностных вод, следовательно, данные об объеме
крупных айсбергов позволяют оценить количество тепла, расходуемое на его
таяние, как в течение года, так и до полного таяния айсберга. От исходного
размера айсберга зависит объем льда и количество воды, которое перешло из
твердой фазы в жидкую. Эта составляющая теплового баланса должна учитываться
при анализе процессов в верхнем слое океана в Антарктическом регионе.
Список используемых источников
1. Статья Jarom Ballantyne. 2002. A
Multidecadal Study of the Number of Atlantic Icebergs Using Scatterometr Data.
Brigham Young University.
2. A.A.
Романов. 1996. Ледовы условия плавания в Южном океане, стр. 16-27.
. Рис
У. Основы дистанционного зондирования. - М.: Техносфера, 2006, 336 c.
. Вагапов
Р.Х., Гаврило В.П., Козлов А.И., Лебедев Г.А., Логвин А.И. Дистанционные
исследования морских льдов. - Санкт-Петербург: Гидрометиздат, 1993 - 324 с.
. Кавелин
С.С., Белов Д.Г., Бушуев Е.И. и др. Радиолокация
Приложение
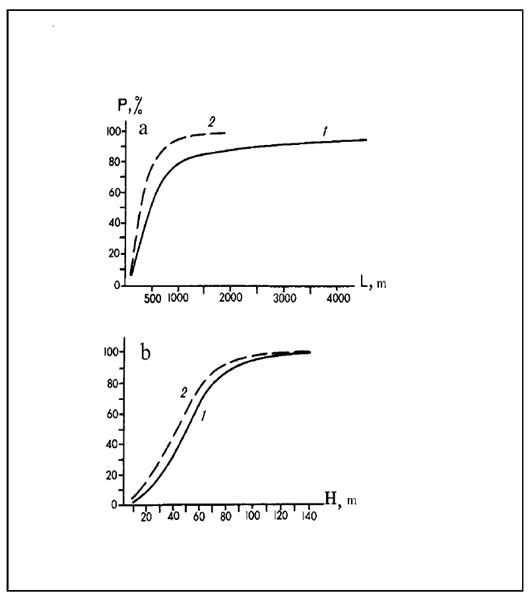
Рисунок 1 Вероятность длины (H, м) и высоты айсбергов (b, м) к югу (1) и
северу (2) от 65°-50° юш
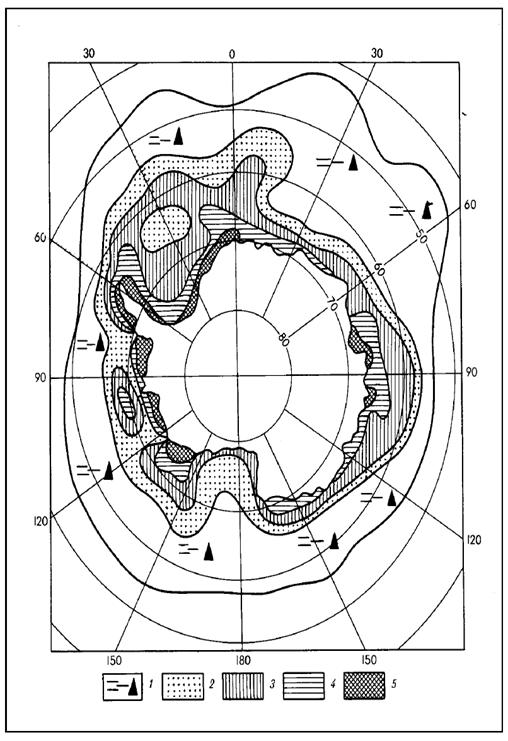
Рисунок 2 Плотность распределения айсбергов (количество на 103 км2).
Обозначения: 1 - 0-1, 2 - 2-3,3 - 4-9, 4 - 10-14, 5 - 15 и более