|
Название лодки
|
Водоизмещение, т
|
Типовая длительность плавания / предельная
автономность
|
Число мест, экипаж / пассажиры
|
Глубина погружения, м
|
|
Садко
|
100
|
1-2 часа/ 72 часа
|
2+43
|
до 40
|
|
Sinbad
|
100
|
2-3
|
2+44
|
до 75
|
|
DeepstarTourist
Submarine
|
90
|
1-2 часа/ 72 часа
|
2+45
|
до 100
|
|
Mergo Tourist Submarine
|
23
|
1-2 часа/96 часов
|
1+10
|
до 80
|
|
V48 Tourist Submarine
|
28
|
0,75-1/24 часа
|
3+46
|
до 100
|
|
MP 26 TouristSubmarine
|
35
|
1-2 часа/ 84 часа
|
2+24
|
до 100
|
|
LS 250 TouristSubmarine
|
106
|
1-2 часа/ 72 часа
|
2+46
|
до 75
|
|
Taurus
|
500-1500
|
30 дней
|
2+8
|
до 500
|
|
Nomad 1000
|
|
30 дней
|
2+8
|
до 350
|
|
Seattle 1000
|
|
30 дней
|
3+9
|
до 350
|
|
Phoenix 1000
|
|
30 дней
|
3+10
|
до 305
|
Развитие конструкций ТПЛ в настоящее время ведет к переходу
от «ныряющих» ТПЛ (Садко, Atlantis, Sinbad, SeaFarer с длительностью подводной экскурсии от 1 до 3
часов), эксплуатируемых вблизи корабля - базы в небольших бухтах, к полноценным
автономным ТПЛ (Taurus, Nomad 1000, Seattle 1000, Phoenix 1000), оперирующих в прибрежных акваториях и
открытых морях, в том числе и на больших глубинах. Отдельные ТПЛ по техническим
характеристикам уже приближаются к характеристикам дизельных подводных лодок
военных флотов.
Анализ ряда ТПЛ (Симбад, Discovery 1000, Triton, Explorer 1000, Nomad 1000, Seattle 1000, Phoenix 1000 и др.) позволяет
сделать вывод: современные ТПЛ (даже сосроком эксплуатации до 30 дней) не имеют
ни активных, ни пассивных средств обнаружения надводных кораблей в ближней зоне
(от 100 до 3000 м), что потенциально может привести к возникновению
навигационных аварий.
В соответствии с [3], основными причинами навигационных
аварий ТПЛ могут являться (рисунок 1):
Рисунок 1 - Причины навигационных аварий ТПЛ
а) столкновение ТПЛ с надводными судами при всплытии ТПЛ;
б) столкновение с навигационными препятствиями (рифами,
скалами и др.) при нахождении ТПЛ на глубинах.
Поскольку ТПЛ могут находиться в зоне действия нескольких
источников шумов, необходимо обеспечить хорошую разрешающую способность по
курсовым углам.
Из практики эксплуатации ПЛ военного назначения известно, что
средствами обеспечения безопасности ПЛ являются гидроакустические станции
различного назначения. Исходя из этого, в работах [3,4] была предложена
первичная система мер для обеспечения навигационной безопасности плавания ТПЛ,
включающая применение станций звукоподводной связи, эхолотов, гидроакустических
станций шумопеленгования (ГАС ШП) и активных среднечастотных гидролокаторов. В
[3] так же было установлено, что в лучших случаях ТПЛ обеспечиваются (рисунок
2а): эхолотом (1), станцией звукоподводной связи (2) и курсовым активным
гидролокатором (3) с ограниченным сектором обзора, который дает информацию о
ближних препятствиях по курсу ТПЛ (обнаружение скал и рифов). И то, даже такая
упрощенная схема освещения ближней обстановки сегодня применяется у
незначительного количества ТПЛ. Предложенная же в работах [3, 4] схема
освещения ближней обстановки более высокого уровня (рисунок 2б), включающая
эхолот (1), станцию гидроакустической связи (2), курсовой гидролокатор (3), ГАС
обеспечения всплытия (4) и эхолот определения расстояния до поверхности моря
(5) сегодня не применяется ни на одной ТПЛ. Несмотря на очевидную актуальность,
предложения, высказанные в [3], не получили развитие. Указанное направление не
анализировалось даже на уровне научных исследований, что подтверждается
отсутствием научных публикаций в период с 2001 по 2011 г., кроме [3, 4].
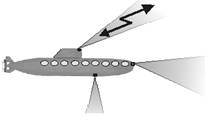

Рисунок 2 - Акустическое оснащение ТПЛ
Во многом отсутствие интереса к повышению навигационной
безопасности ТПЛ связано с использованием ТПЛ вблизи судна сопровождения [3] и
длительностью погружения ТПЛ в пределах 1-2 часов, что позволяет переложить
контроль за водной поверхностью на судно сопровождения [3] (а в ряде случаев и
использовать сигнал «Ведутся водолазные работы»). Такой подход годится только
для «ныряющих» ТПЛ и только в ограниченных водоемах и не приемлем для новых ТПЛ
с длительным циклом подводного плавания, которые должны обладать собственными
средствами обзора обстановки. По этой причине проблема развития собственных
гидроакустических средств наблюдения становится более актуальной, в связи с
чем, следует продолжить, начатые в [3, 4] исследования эффективности ГАС ТПЛ.
Цель работы
Целью работы является:
проведение исследования рабочих характеристик высокочастотных
гидроакустических станций шумопеленгования (ВЧ ГАС ШП) при различных режимах
обработки принимаемых сигналов;
определение возможности применения ВЧ ГАС ШП на ТПЛ, как на
эксплуатируемых, так и на разрабатываемых ТПЛ среднего водоизмещения (500-1500
т);
разработка модели ВЧ ГАС ШП для исследования ее
характеристик, и проведение на полученной модели сравнения разрешающей
способности по пространству при применении различных алгоритмов формирования
веера ПК;
проведение количественных и качественных оценок характеристик
ВЧ ГАС ШП и определение ее облика для установки на ТПЛ с учётом условий
использования.
Область применения результатов
. Данные полученные в результате выполненной работы
могут быть использованы для повышения уровня безопасности подводного плавания
ТПЛ при проектировании новых ТПЛ и модернизации существующих ТПЛ.
. Полученный облик ВЧ ГАС ШП для ТПЛ может служить
основой для формирования технических заданий на ГАС ШП для ТПЛ.
1. Постановка задачи
1.1
Обеспечение безопасности плавания ТПЛ
Поскольку проблема построения ГАС ШП для ТПЛ является
относительно новой, то был произведен обширный поиск литературы с 1995 г.
соответствующему периоду использования ТПЛ. Поиск литературы производился среди
таких источников как «РЖ «Акустика» - раздел гидроакустики, «РЖ «Радиофизика» -
раздел акустические системы, в журналах «JASA», «See-technology», «Гидроакустика»,
«Судостроение» среди материалов конференций НСБ Проблемы прикладной
гидроакустики и гидрофизики (1996-2010 гг.). Проведенный поиск позволил
установить, что проблема безопасности плавания ТПЛ посвящено крайне мало
статей, хотя в научном плане существование такой проблемы и пути ее решения
были сформулированы еще 10 лет назад [3,4].
Следует отметить, что указанные исследования в части
исследования ВЧ ГАС ШП ТПЛ производятся впервые. Поэтому при проведении
исследований требуется выявить:
- класс и параметры ТПЛ, наиболее
подверженных риску столкновения с надводными судами;
- предварительные данные о возможности
размещения ГАС ШП на выбранных ТПЛ;
- предварительные данные о диапазоне рабочих
частот;
- параметры используемой приемной антенны высокочастотной
ГАС ШП;
- возможность заимствования для
высокочастотных ГАС ШП общих принципов построения низкочастотных ГАС ШП;
- основные районы эксплуатации ТПЛ;
- наиболее сложные гидролого-акустические
характеристики возможных районов эксплуатации;
- характер шумов в указанных районах и
собственных акустических помех ГАС ШП;
- параметры шумов надводных судов;
- виды обработки сигнала, значения отношения
сигнал / помеха, при котором будет приниматься решение об обнаружении цели,
время накопления.
При проведении исследования необходимо определить дальности
действия в различных гидролого-акустических условиях по используемым в
отечественной промышленности программам расчета дальности обнаружения ГАС ШП,
провести моделирование параметров обнаружения целей при различных режимах
обработки и определить общую структуру высокочастотной ГАС ШП ТПЛ.
Нахождение ТПЛ в зоне действия интенсивного судоходства, а
также источников береговых и надводных шумов, требует обеспечение хорошей
разрешающей способности тракта обнаружения в горизонтальной плоскости, для чего
необходимо провести исследования разрешения по пространству алгоритмов
обработки принимаемой гидроакустической информации.
.2
Принципы построения ГАС ШП
Вопросы применения высокочастотных ГАС ШП в настоящее время в
современной гидроакустической технике совершенно не изучены. Кроме того по ряду
источников можно сделать ошибочные выводы, что потребность использования
высокочастотных станций ШП не актуальна [5]. Фактически, потребности
использования ГАС для военной промышленности (требования увеличения дальности
обнаружения) привели к тому, что вся современная гидроакустическая техника ШП
стала использовать низкочастотный (НЧ) диапазон частот для максимальных
дистанций обнаружения. Как правило, современные ГАС ШП используют диапазон
частот от 0,3-0,6 до 5-8 кГц при использовании носовых антенн ШП и 0,01 - 3 кГц
при применении гибких протяженных буксируемых антенн [5].
Использование низкочастотного диапазона пеленгования в ГАС ШП
естественно потребовало увеличения апертуры приемных антенн ГАС ШП и,
соответственно, массогабаритных характеристик всей ГАС. Фактически, к
настоящему времени апертуры антенн ГАС ШП стали сопоставимы с шириной корпуса
ПЛ в носовой оконечности, размеры антенн достигают 0,5…0,8 диаметра корпуса и
0,2-0,5 длины борта [5].
То есть в целом в современной гидроакустике подход по
построению ГАС ШП характеризуется:
- уходом в область НЧ и увеличением
габаритов антенн практически до габаритов носителя;
- использованием такихширокоапертурных НЧ
антенн ГАС ШП для обнаружения ПЛ и НК, как в ближней, так и в дальней зонах;
- совмещением на базе широкоапертурных НЧ
антенн ГАС ШП задач военного назначения и части задач обеспечения навигационной
безопасности плавания;
- полным отсутствием применения ГАС ШП в
диапазоне выше 8…9 кГц.
Для обеспечения освещения ближней обстановки в
высокочастотном диапазоне используются только активные ГАС навигации и
миноискания [5]. При этом современные активные ГАС военного назначения при
обзоре пространства в пределах 1-3 км потребляют от 1 до 40 КВт электроэнергии.
Также, в указанных системах для увеличения качества обнаружения в ближней зоне
разработчики стремятся увеличивать апертуру антенны, например, на атомная ПЛ
Вирджиния носовая цилиндрическая активная высокочастотная ГАС миноискания и
обзора ближней обстановки была увеличена в диаметре до 3,5-4,5 м.
Для обеспечения навигационной безопасности ТПЛ в настоящее
время используются и то не всегда, только сверх высокочастотные активные ГАС
ближнего обзора с рабочими частотами 400 - 1000 кГц в основном типа ГАС «ColorImage» с дистанциями
обнаружения донных препятствий до 20-30 м. в секторе около 60-90 град.
Какие-либо научные разработки о достаточности такого подхода в обеспечении
навигационной безопасности плавания отсутствуют. Мало того организации
разработчиков ТПЛ с водоизмещением свыше 1000 т, предлагают просто
ограничиваться применением однолучевой курсовой ГАС.
В целом можно утверждать, что тенденция использования
высокочастотного диапазона для обеспечения навигационной безопасности плавания
ограничена областью активных ГАС обзора ближней обстановки, характеризующихся:
- увеличением габаритов антенн и мощности
излучаемых сигналов;
- совместным использованием широко
апертурных антенн для решения задач военного назначения (обнаружения мин и
торпед в активном режиме) и задач обеспечения навигационной безопасности
плавания (обнаружения надводных судов, айсбергов, подводных скал и рифов,
подводных лодок) на дистанциях 1,5…2,5 км.
При рассмотрении данных материалов, казалось бы, можно
сделать вывод о неэффективности использования высокочастотных станций ШП, в
связи с отсутствием их применения в настоящее время. Очевидным образом
возникает вопрос, имеют ли ГАС ШП высокочастотного диапазона какие-либо
перспективы применения.
.3
Виды обработки принимаемых сигналов
Во всех современных гидролокационных системах обработка
сигналов относится к числу наиболее важных операций. В сочетании с операциями,
выполняемыми акустическим преобразователем, она дает возможность получить
информацию об окружающем пространстве в океане.
Во многих ситуациях акустическая среда, а также цели и
источники звука могут обладать высокой направленностью, так что с успехом могут
быть использованы методы пространственной фильтрации и совместной обработки
сигналов с выходов приемной антенны.
При обработке принимаемых сигналов применяется множество
различных алгоритмов и систем, хотя значительная часть этих алгоритмов
базируется всего на нескольких основных идеях [6].
Так, например, во многих случаях одна компонента внешнего
поля акустических сигналов представляет собой помеху, а другая - сигнал от
источника, находящегося на определенном направлении. Эффективный алгоритм
обработки принимаемых сигналов обеспечивает минимизацию отклика на шумовую
составляющую путем минимизации перекрытия диаграммы направленности с
интенсивными компонентами поля шумов и в то же время сохраняет направление ХН
на цель (т.е. на источник сигнала). Все алгоритмы, обеспечивающие эту
минимизацию, должны быть весьма универсальными ввиду того, что оценки
акустических свойств окружающей среды следует находить в реальном времени.
Сомнительно, чтобы все эти алгоритмы можно было реализовать, не применяя
современной цифровой техники.
Аддитивный алгоритм формирования ПК
В простейшем виде пространственная фильтрация заключается в
введении задержек на выходах преобразователей рабочего пятна для того, чтобы
можно было учесть относительные задержки распространения сигнала для всех
направлений источник - элемент, а затем просуммировать результаты. Сигналы,
приходящие с интересующего нас направления, суммируются когерентно (т.е.
синфазно), а сигналы с других направлений - некогерентно и, следовательно,
ослабляются. Обычно, однако, используется более сложная обработка с
неодинаковым взвешиванием (амплитудным распределением) и сдвигом фаз на выходах
всех преобразователей приемной антенны. Часто все эти операции в ГАС военного
назначения выполняются адаптивно при обработке сигналов с учетом получаемых
данных. Основной метод формирования диаграммы направленности иллюстрируются на
рисунке 3.
Рисунок 3 - Аддитивный алгоритм формирование ПК
В алгоритмах обработки принятых сигналов, основанных на
представлении сигналов с помощью плоских волн, применяется преобразование
Фурье, которое связывает весовые коэффициенты преобразователей с формой
диаграммы направленности приемной антенны.
Формирование пространственных каналов (ПК) по приведённой
схеме происходит в частотной области. Сигналы с выходов каналов антенны после
перевода в частотную область и ввода фазовых множителей, суммируются с весами
по элементам рабочего пятна. Дополнительно вводится накопление по времени.
Выходной эффект системы обработки определяется по формуле:
 ,
,
где  , Х - выход m-го элементарного канала, f - частота, A - амплитудный
коэффициент, α - угол
компенсации, n - количество элементарных каналов в
рабочем пятне,
, Х - выход m-го элементарного канала, f - частота, A - амплитудный
коэффициент, α - угол
компенсации, n - количество элементарных каналов в
рабочем пятне,  - временная задержка, возникающая при
прохождении плоского фронта сигнала на элементах приемной антенны, t - время накопления.
- временная задержка, возникающая при
прохождении плоского фронта сигнала на элементах приемной антенны, t - время накопления.
Взаимосвязь между физическим размером антенны и шириной ее
диаграммы направленности имеет вид соотношения неопределенностей, так что чем
больше размер антенны, тем уже ее диаграмма. Но на практике размеры антенны
ограничены. Кроме того, свойства среды распространения, влияющие на
когерентность сигналов, накладывают ограничения на максимальные размеры антенн.
Из вышеизложенного и того факта, что модуль волнового вектора уменьшается при
увеличении частоты звука, следует необходимость применения как можно более
высоких частот для получения узких диаграмм направленности. К сожалению,
влияние среды распространения и, в частности, поглощение звука ограничивают эту
возможность.
Мультипликативный алгоритм формирования ПК
Теория обработки принимаемых сигналов антенны, ориентированной на
линейное взвешивание и фазовый сдвиг выходных сигналов преобразователей, в
значительной мере базируется на фурье-анализе. Этот естественный результат
вытекает из представления поля сигналов с использованием плоских волн. В ряде
важных применений используются также операции коррелирования выходных сигналов
приёмников. Основная идея метода хорошо иллюстрируется на примере коррелятора с
расщепленной диаграммой направленности, схема которого приведена на рисунке 4.
Выходным эффектом мультипликативного алгоритма (часто называемого
корреляционным) является:

Т.е. при такой обработке сигналов преобразователи рабочего пятна
приёмной антенны разбиваются на две группы, каждая из которых рассматривается
по аддитивной схеме (1). Выходные сигналы двух групп коррелируются. Принцип
работы этой системы заключается в том, что если в направлении главного лепестка
диаграммы
Рисунок 4 - Мультипликативный алгоритм формирование ПК
Имеется источник сигнала, то он будет сфокусирован каждой из групп
элементов и создаст идентичные (или похожие) выходные сигналы, что обеспечит
высокий уровень взаимной корреляции. Напротив, если в направлении главного
лепестка диаграммы энергия в сигнальном поле отсутствует, выходные сигналы
будут неодинаковы и слабо коррелированны. Хотя коррелятор с расщепленной
диаграммой используется достаточно часто, мультипликативные антенны (с перемножением)
практически не применялись [7]. Одним из главных недостатков этого метода
является то, что при небольших отношениях сигнал/шум на выходах обеих антенн
операция умножения изменяет некоторые пороговые характеристики системы.
С целью улучшения обнаружения слабых целей на фоне сильных
применяется обработка, в ряде случаев называемая нормированной
мультипликативной обработкой.
Заключается она в нормировании (делении) выходного эффекта
мультипликативной обработки (2) на модуль произведения аддитивных половинок
рабочего пятна:
Известно, что достоинства мультипликативных алгоритмов в меньшей,
по сравнению с аддитивными, ширине ХН. Однако, отношение сигнал / помеха
мультипликативных алгоритмов меньше, чем у аддитивного на 3 дБ [8], что важно
при обнаружении слабых сигналов, но может оказаться не столь существенным при
решении поставленных перед ГАС ШП задач.
Следует отметить, что существуют и другие алгоритмы,
обеспечивающие высокое (и сверхвысокое) пространственное разрешение, но они
довольно ресурсоёмки и их применение в ГАС ШП туристической ПЛ скорее всего
избыточно.
2. Технические характеристики и состав ГАС ШП ТПЛ
2.1
Область применения ВЧ ГАС ШП
Следует отметить, что характер применения ГАС ШП с момента
появления первых ГАС и по настоящее время диктовался только военными задачами.
При этом другие области применения полностью игнорировались. Поэтому для
выявления области возможного применения высокочастотных ГАС ШП первоначально
следует выявить новые области техники, в которых они могут быть эффективно
использованы. Фактически здесь следует использовать принцип прогресса Стива
Джобса: «не дожидаться когда потребитель на своем жизненном опыте сформулирует
требования к объекту техники, а опережающе сформировать и создать на уровне
имеющихся знаний потребность в новом объекте с позитивными потребительскими или
техническими свойствами». Применительно к задачам гидроакустики следует, не
дожидаясь, когда численное увеличение ТПЛ начнет приводить к навигационным
авариям с участием ТПЛ, опережающе формировать гидроакустические средства
снижения риска возникновения таких аварий.
Такая задача была ранее сформулирована и поставлена в [3,4],
где было показано, что ТПЛ не обеспечены собственными средствами предотвращения
навигационных аварий с участием ТПЛ и надводных судов при всплытии ТПЛ и,
особенно, при аварийном всплытии ТПЛ. В [3,4] также отмечалось, что на тот
период времени ТПЛ были ныряющих типов и эксплуатировались в небольшом числе
прибрежных зон, в основном бухт, заливов и атоллов с ограничением движения
надводных судов вокруг ТПЛ (фактически с применением ограничения движения в
зоне, как при проведении водолазных работ). Там же отмечалось (2002 г. - 2004
г.), что тенденция развития ТПЛ приведет к появлению морских ТПЛ, для которых
вероятность возникновения навигационных аварий (при отсутствии
гидроакустических средств) начнет сильно возрастать. В [3,4] также на первичном
уровне были сформулированы требования по дистанциям обнаружения надводных судов
и приведены примеры возможностей обнаружения надводных судов активными
высокочастотными ГАС в сложных гидролого-акустических условиях на фоне влияния
реверберационных помех.
Хотя в [3,4] отмечалась необходимость развития и других
гидроакустических средств ТПЛ (ШП ГАС обеспечения всплытия), детального анализа
возможностей таких станций не проводилось.
Из изложенного материала следует, возможной областью
применения ГАС ШП может быть область обеспечения навигационной безопасности
плавания ТПЛ.
В качестве объекта применения следует выбрать автономную ТПЛ
морского плавания, как наиболее подверженную риску навигационных аварий по
причине ее выхода в свободное плавание на прибрежные коммуникации и шельфовые
зоны, отличающиеся повышенной плотностью надводного судоходства, особенно в
туристических районах. Примером такой ТПЛ может служить «Феникс» со следующими
параметрами:
- глубина погружения - 305 м;
- длина - 65 м;
- ширина - 8 м;
- водоизмещение - 1500 т;
- максимальная скорость на поверхности - 18
узлов;
- максимальная скорость под водой - 10
узлов;
- запас кислорода - 30 дней;
- дальность автономного плавания - 3000
морских миль.
.2
Основные требования к ГАС ШП ТПЛ
Обеспечения навигационной безопасности ТПЛ
Используя подходы [3,4, 9] определим минимальные требования к
зонам обнаружения надводных судов. В качестве такого требования следует выбрать
время принятия и выполнения решения с момента обнаружения опасных целей для
прекращения всплытия или экстренного перехода от всплытия к погружению.
Минимальное значение времени примем за tмин =60 сек (исходя 10 сек
на анализ цели, 10 сек на принятие решения и 40 сек на выполнение перехода на
безопасную глубину 30-40 м), в качестве желательного времени принятия решения
следует выбрать значение tтип =120 сек, при котором кроме погружения можно
принять и маневр уклонения на 150 м в сторону от курса опасного судна (при
скорости ТПЛ - 5 км/час), за критическое время можно принять tкр =30 сек (7 сек на анализ
опасной цели, 3 сек на принятие решения, 20 сек на экстренное прекращение
всплытия и переход на глубину 25-30 м). Исходя из этих значений времени при
скорости сближения надводного корабля vнк=60 км/час (высокая скорость, сильная цель)
требование к зонам обнаружения будут, соответственно:
rмин= 1 км
rтип =2 км
rкр=0,5 км
Поскольку желательно иметь запас по времени принятия решения
посильным быстроходным целям можно рассматривать и возможность пеленгования
целей на дистанции до 3 км.
Очевидно, что по слабым среднескоростным (20 км/час) и
тихоходным (10 км/час) кораблям время принятия и выполнения решения даже при
обнаружении на дистанции 1 км значительно возрастет и составит 180 сек и 360
сек, соответственно. Таким образом, единственным на данный момент областью
применения высокочастотных ГАС ШП может стать область обеспечения навигационной
безопасности ТПЛ и в части оперативной выдачи экипажу ТПЛ сведений о
направлениях на надводные суда в районе плавания ТПЛ и изменении этих
направлений с течением времени.
Диапазон рабочих
Исходя из выбора интервала дистанций, на которых желательно
проводить наблюдение с ТПЛ надводных судов до сближения с ТПЛ, можно провести
предварительное определение диапазона рабочих частот ГАС ШП ТПЛ. Для этого
воспользуемся формулой (4) определения оптимальной частоты шумопеленгования [10]:

Подставляя в формулу для оптимальной частоты ШП (1) значения
дистанций от 3 до 0,5 км, получим для выделенной зоны наблюдения значения
диапазона оптимальных частот ШП в пределах от 9,0 кГц для 3 км до 29,7 кГц для
0,5 км. Учитывая, что процесс шумопеленгования производится не на одиночной
частоте, а в достаточно широкой полосе, поддиапазоны частот по проведенным
расчетам можно определить как:
– первый 10 ± 5 кГц, второй 20 ± 5 кГц, третий 30 ± 5
кГц для шумопеленгования с использованием трех поддиапазонов;
– первый 10 ± 2,5 кГц, второй 15 ± 2,5 кГц, третий 20 ±
2,5 кГц, четвертый 25 ± 2,5 кГц, пятый 30 ± 2,5 кГц для шумопеленгования с
использованием пяти поддиапазонов;
– первый 10 ± 4 кГц, второй 19 ± 5 кГц, третий 28 ± 6
кГц для шумопеленгования с использованием трех поддиапазонов неравномерных по
ширине.
Вопрос о выборе поддиапазонов ГАС ШП ТПЛ при применении
цифровой обработки техники ШП не является критичным и может реализовываться
самим оператором ГАС ШП ТПЛ путем индивидуальной переустановки значений границ
цифровых фильтров для подбора удобного представления целей на экране индикатора
(в военных ГАС ШП поддиапазоны ШП и диапазоны до сих пор имеют фиксированный
характер, что можно объяснить стремлением оптимизировать ГАС ШП под
максимальные дистанции обнаружения целей широкоапертурными ГАС ШП военного
назначения).
Массо-габаритные характеристики приемной антенны
Антенны, используемые в ГАСШП военного назначения, отличаются
значительным разнообразием по форме и размеру, способам формирования и
управления ХН, типу примененных электроакустических преобразователей, способу
размещения на носителе и условиям эксплуатации. Выбор той или иной антенны
определяется в конечном счете результатом системного анализа по критерию
«носитель - ГАС», при котором учитываются требования согласования формы антенны
с обводами корабля и возможности ее размещения на ПЛ.
Приемные антенны существующих ГАС ШП разделяются на следующие
группы:
) цилиндрические антенны;
) сферические антенны;
) конформные антенны, оптимизированные под обводы
корпуса;
) длинные плоские бортовые антенны;
) длинномерные гибкие буксируемые антенны.
Учитывая, что ГАС ШП ТПЛ на данном этапе рассматриваются
впервые из перечня рассматриваемых антенн ШП для ТПЛ следует исключить:
- длинномерные гибкие буксируемые антенны,
по причине отсутствия на ТПЛ мест для установки устройств постановки выборки,
ограниченного сектора наблюдения (только по борту) и принципиального применения
только низких частот в ШП для дальнего обнаружения целей;
- длинные плоские бортовые антенны, по
причине ограниченного сектора наблюдения (только по борту) и принципиального
применения только низких частот в ШП для дальнего обнаружения целей, а так же
отсутствия в РФ на данный момент технологий изготовления и применения длинных
бортовых антенн (за рубежом на ПЛ военного назначения такие антенны длинной
25-70 м используются серийно);
- сферические антенны, по причине
специфических требований размещения на ПЛ (занимают всю носовую оконечность),
более сложной пространственной обработки и фазирования при формировании
каналов;
- конформные антенны, по причине
необходимости построения таких антенн непосредственно вписанных в корпус
корабля, что невозможно без разработки ГАС ШП совместно с ПЛ, и наиболее
сложной пространственной обработки и фазирования при формировании каналов при
использовании приемных элементов, расположенных на криволинейных поверхностях.
Таким образом из всех антенн ШП для решения поставленной
задачи оптимально подходит антенна ШП цилиндрической формы (рисунок5). Антенны
ШП цилиндрической формы обеспечивают возможности:
- минимизации числа элементарных приемных
каналов по сравнению со сферическими и конформными антеннами с тем же
характерным диаметром;
- более простую обработку при фазировании
элементарных каналов и формировании пространственных каналов по сравнению со
сферическими и конформными антеннами;
- хорошей идентичностью пространственных
каналов по сравнению с конформными антеннами;
- хороший пространственный обзор по
горизонтали ограниченны в корму только затенением секторов обзора корабельными
конструкциями;
- удобством размещения на ТПЛ как при
проектировании ТПЛ, так и при их модернизации (цилиндрическая антенна ШП может
быть установлена в носовой оконечности на палубе, в обводах или под килем, а
также на рубке ТПЛ).

Рисунок 5 - Цилиндрическая приемная антенна
Диаметр цилиндрической антенны ТПЛ ограничивается только
габаритами корпуса ТПЛ по ширине. Учтем, что чем выше антенна, тем уже будет ХН
по вертикали, что увеличит зону акустической тени у поверхности на ближних
расстояниях от ТПЛ, а введение многолучевых вееров в вертикальной плоскости,
как в комплексах военных ПЛ является экономически и энергетически
нецелесообразно для ТПЛ. Исходя из параметров выбранного объекта ТПЛ «Феникс»,
принципиально не представляется никаких трудностей по размещению на данной ТПЛ
цилиндрической антенны ШП с параметрами:
1) Диаметр - 1,5 м;
) Высота - 0,1 м;
) Число элементов по горизонтали -
144;
) Расстояние между элементами по
горизонтали - 2,5°;
5) Число элементов по вертикали - 2 (каналы по вертикали
объединены);
) Общее число элементарных каналов 144 по выходу
антенны.
Выбранная высота антенны оптимальна для
данного диапазона частот с точки зрения минимизации числа элементарных каналов
при одновременном обеспечении захвата целей по вертикали (обеспечение
достаточной ширины главного максимума ХН по вертикали). В результате ширина ХН
в вертикальной плоскости будет от 26,2° до 59,7°, чего достаточно для
обеспечения безопасности всплытия. Число элементов по горизонтали определено
исходя из значения выбранных частот и диаметра антенны ШП для обеспечения шага
между элементами антенны ШП 1/2 длины волны на частоте 30 кГц при обеспечении
общего сектора обзора от -90 до + 90 градусов. Можно расширить сектор обзора,
однако, при этом характеристики приема в пространственных каналах наблюдения
находящихся за пределами ±90 градусов ухудшатся.
2.3
Технический облик ГАС ШП для ТПЛ
Для установки ГАС ШП на эксплуатируемые ТПЛ, а также для
уменьшения изменений в конструкции разрабатываемых ТПЛ, массогабаритные
характеристики такой ГАС должны быть минимизированы. Обобщённая структурная
схема ГАС ШП ТПЛ изображена на рисунке 6.
Аппаратура предварительной обработки (АПО), состоящая из
предусилителей и фильтров, предназначена для согласования нагрузки (антенны) с
потребителем - аналого-цифровым преобразователем (АЦП). АПО обеспечивает
усиление принятых сигналов, выравнивание АЧХ (отбеливание) в рабочем диапазоне
частот. АЦП служит для преобразования аналоговых сигналов с выхода АПО для передачи
в ЦВК. АПО также содержит в себе управляемый усилитель, позволяющий производить
автоматически либо вручную усиление принимаемых сигналов.
Рисунок 6 - Структурная схема ГАС ШП ТПЛ
К современным тенденциям относится применение в АЦП 24-х
разрядных цифровых преобразователей и аналоговой аппаратуры с динамическим
диапазоном 90-98 дБ, что позволяет отказаться в АПО от использования
динамических АРУ.
Электронно-вычислительная машина (ЭВМ) с функциями
формирования характеристик направленности (пространственных каналов)
представляет собой мощную многопоточную вычислительную систему, выполняющую
первичную и вторичную обработку сигналов, пришедших из АПО (сигналы с
элементарных каналов в цифровом виде). Помимо задач обработки сигналов ЭВМ
решает задачи системы отображения и регистрации данных и управления (СОРДиУ).
Рабочее место (РМ) оператора ГАС ШП входит в состав ЦВК и
представляет из себя дисплей с устройствами отображения и ввода информации
(клавиатурой и графическим манипулятором).
Особенности построения ГАС ШП ТПЛ
Поскольку основы процесса шумопеленгования для низких частот
хорошо изучены [5] высокочастотную ГАС ШП ТПЛ стоит строитьполагаясь на те же
базовые принципы, по которым разрабатываются современные ГАС.
В рамках принятых подходов ГАС ШП состоит из:
а) приемной антенны;
б) устройства предварительной обработки:
- предварительное усиление;
- аналоговую фильтрацию;
- преобразование сигналов в цифровой массив
по каждому пространственному каналу с синхронизацией по всем каналам;
в) устройства первичной и вторичной обработки на базе
цифровой аппаратуры:
- цифровое формирование набора
пространственных каналов путем временной или фазовой компенсации с
использованием всего массива пространственных каналов (для аддитивной обработки)
или набора подмножеств пространственных каналов (для мультипликативной
обработки), с использованием БПФ (для обработки в узких полосах);
- обработка по пространственным каналам по
аддитивной или мультипликативной схеме;
- накопление во времени (интегрирование)
сигналов по каждому пространственному каналу после обработки;
- сравнение обработанного сигнала с порогом
в каждом пространственном канале;
- подготовка развертки для вывода на
индикатор в одном или нескольких диапазонах частот в координатах угол, текущее
время, интенсивность (монохромное или цветное кодирование);
г) устройство отображения и управления:
- отображение и считывание управляющих
параметров;
- вывод яркостного и амплитудного графика
веера ПК;
- отображение трас обнаруженных шумящих
целей на индикаторе;
- индикация сопутствующих значений (курс,
дата, время и т.п.).
Такая обобщенная функциональная схема применима и для ГАС ШП
ТПЛ (рисунок6), при этом в ГАС ШП будут использоваться более высокочастотные
диапазоны, чем в ГАС ШП военного назначения.
В связи с изменением диапазона ГАС ШП, для обнаружения целей
в ближней зоне и построения ГАС ШП ТПЛ как более упрощенной конструкции,
естественно, надо проанализировать дистанции обзора станции и выявить
возможность применения различных видов вторичной обработки.
3. Определение дистанций обнаружения ГАС ШП ТПЛ
Для принятия решения о применимости ВЧ ГАС ШП на ТПЛ
необходимо оценить зоны контакта, обеспечивающие безопасность плавания ТПЛ.
3.1
Характерная для ТПЛ помехо-сигнальная обстановка
Обнаружение в ГАС ШП ТПЛ надводных судов производится по
выделению на фоне акустических помех шумовых сигналов от целей, аналогично ГАС
ШП военного назначения, только в более высоком диапазоне частот. В высоком
диапазоне частот, как и в низком на приемники антенны приходит сумма сигнала от
цели и помехи (шумы моря, собственная и суммарная).
Уровни шумовых сигналов от целей
Соответственно, для определения дальности действия ГАС ШП ТПЛ
необходимо, определить уровень значений уровней шумовых сигналов от надводных
судов. Для определения этого параметра можно использовать данные представленные
в [8]. При этом, хотя снижения внешнего шумоизлучения в морскую среду в
гражданском судостроении не рассматривается даже теоретически, а возрастание
мощности двигателей судов и повышение их скорости только повышают этот уровень,
для расчетов ГАС ШП будем выбирать уровни, исходя из данных [8] с поправкой в
сторону некоторого занижения уровня шумоизлучения надводных судов. Конкретный
выбор уровней шумоизлучения целей в выбранных частотных диапазонах ГАС ШП ТПЛ
рассматривается ниже, при определении параметров расчетов.
Помеха, обусловленная шумами моря
Выбор значений помех ГАС ШП, обусловленных шумами моря
производился по [8] для прибрежной зоны с интенсивным судоходством. Уровень
этих помех следует взять 0,003…0,0036 Па/(кГц∙√Гц), то есть с
небольшим завышением уровня по [8] для прибрежных зон.
Указанная помеха является шумом нормального вида (белый шум
со спектральным спадом 6 дБ на октаву).
Помеха, обусловленная собственными шумами ТПЛ
Известно, что при строительстве ТПЛ не производится работ по
снижению уровня собственных шумов до уровней ниже шумов моря, очевидно, в связи
с отсутствием ГАС ШП на ТПЛ. Однако, учитывая, что ТПЛ строятся с участием
специалистов военного судостроения, на них меньше выступающих в поток
элементов, чем на военных ТПЛ 50-60-х годов ХХ века (выступающие элементы
снижают скорость ТПЛ) и их типовая эксплуатационная скорость не превышают 7
узлов, значения собственных шумов ТПЛ следует определять по аналогии с ПЛ
военного назначения 50-60-х годов ХХ века. По [8] значения средних уровней
помех на скорости 2 узла таких ПЛ составляют 0,001 Па/(кГц∙√Гц), а
на 6 узлах 0,002 Па/(кГц∙√Гц). Исходя из этого, для ТПЛ следует
выбрать несколько больший уровень собственных шумов приблизительно в 3 раза
больше, то есть 0,006 Па/(кГц∙√Гц), при спаде, соответственно, 6 дБ
на октаву. Такой уровень является фактически предельно большим для ПЛ малого и
среднего водоизмещения [8], но связи с отсутствием акустических обмеров ТПЛ, на
настоящее время следует ориентироваться на указанные уровни.
Суммарное значение акустических помех ГАС ШП ТПЛ
Учитывая, что акустические помехи работе ГАС ТПЛ взяты как,
помехи является шумом нормального вида. Суммарная акустическая помеха ГАС ШП
ТПЛ определяется по формуле:
 ,
,
где Pпом - суммарная помеха ГАС, P2 м,пом - помеха от шумов моря; P2пл,пом - помеха от собственных
шумов ТПЛ.
Учитывая, что помеха от шумов моря для ТПЛ взята 0,0036
Па/(кГц∙√Гц), а помеха от собственных шумов ТПЛ выбрана 0,006
Па/(кГц∙√Гц). Суммарная акустическая помеха по формуле (5)
составит:
 0,007 Па/(кГц∙√Гц).
0,007 Па/(кГц∙√Гц).
Такой уровень на настоящее время является предельно большим
для дизель-электрических ПЛ в прибрежных районах.
.2
Гидролого-акустические условия в районах эксплуатации ТПЛ
К гидролого-акустическим условиям относятся факторы, влияющие
на параметры (потери) распространения звука от источника (обнаруживаемого
надводного судна) и до приемной антенны ГАС ШП ТПЛ. К указанным факторам
относятся:
- вертикальное распределение скорости звука
(ВРСЗ) в районе эксплуатации ТПЛ;
- поглощение звуковых волн в воде;
- потери при отражении от грунта в
зависимости от структуры грунта (песок, ил, песок с илом, глина, камень,
скальный грунт, кораллы и др.);
- потери при отражении от поверхности в
зависимости от уровня волнения.
Конкретные параметры, указанных факторов зависят от регионов
эксплуатации ТПЛ, а ВРСЗ также зависит от сезонных и суточных климатических
условий, наличия пресноводных стоков с побережья и глубины места.
Учет этих условий раньше (более 15 лет назад) практически не
поддавался быстрому описанию и, соответственно, оценка потерь распространения
звука либо проводилась по уравнению гидролокации (шумопеленгования) без учета
указанных факторов или по приближенным номограммам в основном для глубоких
морей [8, 11].
В настоящее время расчеты такого вида проводятся на базе
компьютерных программ моделирования распространения звука в воде и дальности
действия ГАС ШП в лучевом приближении, выполненных на основе базовых программ и
алгоритмов разработанных в Акустическом институте [12]. Указанные программы уже
более 10 лет применяются для модельных расчетов ГАС ШП в целях определения
потерь распространения звука, значения аномалий и дальности действия ГАС в
зависимости от выбираемых параметров гидролого-акустических условий. Для
использования указанных программ обычно требуется знание инструкции по ее
эксплуатации, так как в силу специфики программ необходим учет большого числа
вариантов условий, параметры которых устанавливаются в программах вручную.
Расчеты дальности действия ГАС ШП ВЧ были проведены по
типовой программе с учетом влияния гидролого-акустических условий (включая учет
ВРСЗ, потерь на грунте в зависимости от типа грунта, потерь при контактах с
поверхностью и влияние поглощения акустических волн), используемой на
предприятии ОАО «Концерн «Океанприбор». Данная программа основана на лучевой
компьютерной модели распространения звука в море разработки АКИН им. акад. Н.Н.
Андреева [12]. Программа предназначена для расчета типовых гидроакустических
средств ШП с линейными, плоскими и цилиндрическими антеннами.
Скорость звука увеличивается в более солёной и более тёплой
воде, а также при большем давлении скорость также возрастает, то есть чем
глубже, тем скорость звука больше. Разработано несколько теорий распространения
звука в воде. В данной программе скорость звука рассчитывается по формуле Лероя
[8]:
= 1492,9 + 3 (T − 10) − 0,006 (T − 10)2
− 0,04 (T − 18)2 + 1,2 (S − 35) − −0,01
(T− 18) (S − 35) + z / 61,
где c - скорость звука в метрах в секунду, T - температура в
градусах Цельсия, S - солёность в промилле, z - глубина в метрах.
Считается, что эта формула обеспечивает точность 0,1 м/с
дляТ< 20° и z< 8000 м.
ВРСЗ определялось исходя из анализа условий в типовых районах
эксплуатации ТПЛ и в районах перспективных для освоения морского подводного
туризма. Основными морскими регионами использования ТПЛ в настоящее время
являются регионы тропических и субтропических морей. В эти регионы входят:
- прибрежные регионы Карибского моря;
- побережье Флориды;
- прибрежные регионы греческого архипелага и
Кипра;
- прибрежные районы юго-восточной Азии
(Филиппины, Индонезия);
- прибрежные регионы морей Египта (Красное
море).
Прибрежные зоны навигации ТПЛ, как правило, осуществляется в
бухтах, заливах или в зоне коралловых рифов (шельфовые зоны) с максимальной
глубиной дна 50-100 м. Как правило, в этих районах также наблюдается очень
оживленное судоходство малотоннажных и среднетоннажных судов: туристических,
каботажных и рыболовных.
ВРСЗ в таких регионах в туристический сезон определяется:
) Высокотемпературными градиентами в результате чего у
поверхности скорость звука, в большинстве случаев, имеет большее значение, чем
на глубине из-за эффективного прогревания верхних водных слоев. [8]. Вариант
ВРСЗ для такого региона приведен на рисунке 7а.
) Комбинацией влияния прогрева верхних слоев и
наличием пресноводных стоков, из-за которых понижается соленость верхних слоев
и на небольшой глубине возникают положительные приповерхностные градиенты
скорости звука, с ростом глубины переходящие в отрицательные градиенты,
определяемые прогревом верхних и средних слоев. Такое распределение скорости
звука является одним из сложных для работы гидроакустических средств, поэтому
его тоже надо учитывать при расчетах дальности действия ГАС ШП ВЧ. Типовой ВРСЗ
для такого района приведен на рисунке 7б.
) Вариант с положительным градиентом ВРСЗ нужно также
учитывать при проведении расчетов, так как такой тип ВРСЗ может проявляться в
перспективных для использования ТПЛ северных морях (Балтийском, Северном морях,
шхерных зонах Скандинавии, как правило, в местах исторических сражений и
археологических находок). Гидрология в этих местах характеризуется охлаждением
верхних слоев моря в холодные сезоны, что приводит к уменьшению скорости звука
в указанных верхних слоях. И, наоборот, с увеличением скорости звука у
поверхности в летние сезоны. Учитывая, что современные ТПЛ эксплуатируются в
сезон спокойного моря, максимальное волнение, закладываемое в программу, не
превышало 3 баллов.
3.3
Расчет зон контакта ГАС ШП ТПЛ
Для регионов тропического и субтропического морей выбирали 2
типа грунта: с относительно небольшими потерями (песок) и с большими потерями
(коралл). Для северного моря - песок и камень. Предельные дистанции обнаружения
целей разной силы в различных гидроакустических условиях при разных глубинах
погружения носителя представлены в таблице 2 при работе с мультипликативной
обработкой сигналов и в таблице 3 - с аддитивной обработкой.
Уровень помех в точке приема выбирался исходя из двух
факторов:
- Уровень шумов моря в прибрежных
акваторияхпри отсутствии штормов.
- Уровень собственных шумов ТПЛ.
Таблица 2. Предельные дистанции обнаружения целей
(мультипликативная обработка)
|
Район
|
Тип гидрологии
|
Тип дна
|
Глубина, м/ сила цели, Па∙КГц/√Гц
|
|
|
|
21 /1
|
21 /3
|
40/1
|
40 /3
|
|
Субтропические моря
|
Рисунок8 а
|
песок
|
1210
|
24811
|
1026
|
23592
|
|
|
коралл
|
1210
|
24893
|
1014
|
1014
|
|
Рисунок8 б
|
песок
|
1149
|
1466
|
1075
|
1222
|
|
|
коралл
|
1149
|
1479
|
1075
|
1222
|
|
Северные моря
|
Рисунок8в
|
песок
|
23694
|
2579
|
2114
|
2127
|
|
|
камень
|
25555
|
2567
|
2102
|
2102
|
|
Балтийское море
|
Рисунок8 г
|
песок
|
1026
|
2163
|
929
|
1931
|
Таблица 3. Предельные дистанции обнаружения целей (аддитивная
обработка)
|
район
|
Тип дна
|
Глубина, м/ сила цели, Па∙КГц/√Гц
|
|
|
21 /1
|
21 /3
|
40/1
|
40 /3
|
|
Субтропические моря
|
песок
|
1222
|
2530
|
1039
|
27991
|
|
коралл
|
1234
|
24812
|
23223
|
2322
|
|
песок
|
1320
|
1479
|
1222
|
1222
|
|
коралл
|
1161
|
1486
|
1075
|
1222
|
|
Северные моря
|
песок
|
2579
|
2689
|
2102
|
2102
|
|
камень
|
2701
|
2102
|
2102
|
|
Балтийское море
|
песок
|
1882
|
31904
|
16505
|
25916
|
Значение порогового обнаружителя (превышение отклика над
помехой) было выбрано (в разах) для уверенного обеспечения обнаружения целей
(обычно для автоматического обнаружения порог должен быть выше 4). Порог может
быть снижен и до 2, но это потребует профессиональной работы оператора ТПЛ с
индикаторными картами, поэтому было взято значение 6 для обеспечения
автоматического обнаружения и снижения числа ложных тревог.
Полученные зоны обнаружения при различных
гидролого-акустичеких условиях приведены графически в Приложении А.
В целом полученные результаты показывают, что малогабаритная
высокочастотная ГАС ШП позволяет ТПЛ обнаруживать надводные суда на дистанциях
1-2,6 км без зон пропуска даже в сложных гидрологических условиях. Такие
дистанции позволяют оператору ТПЛ заранее обнаруживать угрозы возникновения
навигационных аварий. При этом у оператора ТПЛ на принятие решения будет
иметься запас времени от 1,2 до 15,6 мин, в зависимости от скорости движения
надводного судна (от 50 до 10 км/час соответственно).
4. Программная модель ГАС ШП
Для анализа проектных характеристик ВЧ ГАС ШП для ТПЛ
целесообразно воспользоваться математическим моделированием. Полученная модель
ГАС ШП позволит проводить оценку эффективности различных технических и алгоритмических
решений, принятых в процессе разработки такой ГАС ШП.
.1
Среда моделирования. Математическое моделирование
Применение компьютеров в научных исследованиях является
необходимым условием изучения сложных систем. Традиционная методология
взаимосвязи теории и эксперимента должна быть дополнена принципами
компьютерного моделирования. Эта новая эффективная процедура дает возможность
целостного изучения поведения наиболее сложных систем как естественных, так и
создаваемых для проверки теоретических гипотез.
Использование компьютерных моделей превращает компьютер в
универсальную экспериментальную установку. В компьютерном эксперименте
обеспечен полный контроль за всеми параметрами системы, компьютерный
эксперимент дешев и безопасен.
Компьютерное проектирование позволяет не только создать, но и
усовершенствовать сложное изделие, оценить и опробовать его не на реальном
предприятии, а в среде виртуальной реальности. Это особенно актуально для
дорогостоящих, сложных и уникальных технологических комплексов, таких как ГАС
ШП ВЧ для ТПЛ.
Математическое моделирование - это методология научной и
практической деятельности людей, основанная на построении, исследовании и
использовании математических моделей объектов и процессов.
Результативность компьютерной модели в значительной степени
определяется качеством используемого программного обеспечения. Основные
требования, предъявляемые к программам - это, простота ввода и корректировки
исходных данных, а также визуализация (наглядность) результатов счета. Сегодня
имеются и мощные специализированные системы программирования, и специальные
программы, в которых реализуется удобные графические пользовательские
возможности, например MATLAB [13, 14].- это интерактивная система, основным
объектом которой является массив, для которого не требуется указывать
размерность явно. Это позволяет решать многие вычислительные задачи, связанные
с векторно-матричными формулировками, существенно сокращая время, необходимое
для программирования на скалярных языках типа С или Fortran.
Система MATLAB специально создана для проведения именно
инженерных расчетов: математический аппарат, который используется в ней,
предельно приближен к современному математическому аппарату инженера и ученого
и опирается на вычисления, производимые с матрицами, векторами и комплексными
числами; графическое представление функциональных зависимостей здесь
организовано в форме, которую требует именно инженерная документация.
Язык программирования системы MATLAB весьма прост, он
содержит лишь несколько десятков операторов; незначительное количество
операторов здесь компенсируется большим числом процедур и функций, содержание
которых понятно пользователю, имеющему соответствующую математическую и
инженерную подготовку.
В отличие от большинства математических систем, MATLAB является
открытой системой: практически все ее процедуры и функции доступны не только
для использования, но и для модификации. Почти все вычислительные возможности
системы можно применять в режиме чрезвычайно мощного научного калькулятора, а
также составлять собственные программы, предназначенные для многоразового
применения; это делает MATLAB незаменимым средством проведения научных
исследований. По скорости выполнения задач MATLAB опережает многие другие
подобные системы. Все эти особенности делают ее весьма привлекательной для
использования.
MATLABобладает хорошо развитыми возможностями
визуализации двумерных и трехмерных данных. Высокоуровневые графические функции
призваны сократить усилия пользователя до минимума, обеспечивая, тем не менее,
получение качественных результатов. Интерактивная среда для построения графиков
позволяет обойтись без графических функций для визуализации данных. Кроме того,
она служит и для оформления результата желаемым образом: размещения поясняющих
надписей, задания цвета и стиля линий и поверхностей, словом, для получения
изображения, пригодного для включения в отчет или статью. Полный доступ к
изменению свойств отображаемых графиков дают низкоуровневые функции, применение
которых подразумевает понимание принципов компьютерной графики и владение
приемами программирования.
Визуальная среда GUIDEпредназначена для написания приложений с
графическим интерфейсом пользователя. Работа в среде GUIDEпроста, но предполагает
владение основами программирования и дескрипторной графики. Наличие
определенного навыка работы в среде GUIDEпредоставляет возможность создать визуальную
среду для проведения собственных исследований, что значительно облегчает работу
и существенно экономит время.
Система MATLAB использует собственный М-язык, который сочетает
в себе положительные свойства различных известных языков программирования
высокого уровня. С языком BASIC систему MATLAB роднит то, что она представляет
собой интерпретатор (осуществляет пооператорное компилирование и выполнение
программы, не образуя отдельного исполняемого файла). От языка Pascal система
MATLAB позаимствовала объектно-ориентированную направленность, то есть такое
построение языка, которое обеспечивает образование новых типов вычислительных
объектов на основе типов объектов, уже существующих в языке. Новые типы
объектов (в MATLAB они называются классами) могут иметь собственные процедуры
их преобразования (они определяют методы этого класса), причем новые процедуры
могут быть вызваны с помощью обычных знаков арифметических операций и некоторых
специальных знаков, которые применяются в математике.
Работать в среде MATLAB можно как в режиме калькулятора, так
и в программном режиме. При работе в первом из них вычисления осуществляются
сразу после набора очередного оператора или команды MATLAB; значения
результатов вычисления могут присваиваться некоторым переменным, либо
результаты получаются непосредственно, без использования операции присваивания
(как в обычных калькуляторах). Работа в программном режиме осуществляется путем
вызова имени написанной на языке MATLAB программы, предварительно составленной
и записанной на диске и содержащей все необходимые команды, которые
обеспечивают ввод данных, организацию вычислений и вывод результатов на экран.
В обоих режимах пользователю доступны практически все
возможности системы, в том числе вывод информации в графической форме.
Программный режим позволяет сохранять разработанные вычислительные алгоритмы и,
таким образом, повторять вычисления при других входных данных.
Систему MATLAB обоснованно относят к одному из наиболее
мощных научных калькуляторов, которому доступны практически все численные
средства решения научных и инженерных задач, разработанные на настоящий момент.
Использовать эти средства в командном режиме в большинстве случаев очень просто.
Результат получают сразу непосредственно в командном окне в наглядной форме или
в графическом виде в дополнительном графическом окне.
4.2
Структура программной модели
Для моделирования рассматриваемой ГАС ШП была разработана
программа моделирования на языке MATLAB. Программная модель состоит из GUI-файла, содержащего
описание графического интерфейса пользователя (ГИП), а также из пакета М-файлов
(рисунок 8). В эти М-файлы выделены основные функции, выполняемые при
моделировании, исходный текст которых приведен в Приложении Б.
М-Файл обеспечения обмена с ГИП является главным и образует
единое целое с GUI-файлом описания ГИП. При моделировании запускается М-файл,
который по надобности вызывает остальные М-файлы, содержащие следующие функции:
· Модель антенны - формирование элементов
приемной антенны в трехмерном пространстве;
· Задание входных сигналов - создание
имитируемых сигналов от объектов с заданными параметрами;
· Формирование выходов элементов антенны -
добавление созданных сигналов на каналы сформированной антенны;
· Формирователь выходных эффектов - создание
пространственных каналов наблюдения;
· Статистическая обработка - блок анализа
результатов моделирования;
· Отображение - вывод в рабочее окно
индикаторных картин и прочих параметров.
Рисунок 8 - Структурная схема программной модели ГАС ШП
В главном М-файле находятся операции взаимодействия с
графическим интерфейсом (считывание введенных параметров, отображение графиков
и результатов вычислений) и внешними функциями. Также главный М-файл содержит в
себе основной алгоритм проведения модельного исследования. Для запуска
программной модели в MatLab запускается главный М-файл.
Функционирование модели запускается по нажатию кнопки «Пуск»,
при этом кнопка «Стоп» отключается. После нажатия на кнопку «Пуск» считываются
заданные параметры приемной антенны (радиус, расстояние между элементами,
количество элементов и рабочий сектор). Считанные данные передаются во внешнюю
функцию создания антенны. Результат вычислений функции записываются в два
массива:
- координаты каждого элемента;
- курсовые углы элементов, относительно
диаметральной плоскости антенны.
Далее запускается цикл, количество повторений которого, при
установлении флажка «Счет», равно введенному количеству опытов. Если флажок
«Счет» не установлен, то цикл будет выполняться бесконечное количество раз. Для
прерывания функционирования модели нужно включить кнопку «Стоп». При этом по
окончанию выполнения очередной итерации цикла, он не повторится - программа
выйдет из цикла и на этом ее функционирование корректно завершится. Для
повторного запуска нужно нажать кнопку «Пуск».
В цикле сначала задается энергетическое поле элементов
приемной антенны с использованием функции добавления сигнала:
. Задается уровень шумов в элементарных каналах
приемной антенны (шумы между элементами некоррелированны, их распределение
соответствует нормальному закону);
. К полю антенны добавляется сигналы от сымитированных
источников. Параметры этих сигналов, такие как уровень и угол прихода, вводятся
в ГИП, закон формирования сигнала источника задан в главном файле программы в
перечне параметров вызываемой функции добавления сигнала.
После создания энергетического поля антенны по введенным
параметрам рассчитывается амплитудное распределение в горизонтальной плоскости
учитываемое при формировании пространственных каналов. Вызывается функция
формирования пространственных каналов, в параметрах которой указывается
алгоритм обработки, рассчитанное амплитудное распределение и размер рабочего
сектора. Результаты выполнения функции: выходные эффекты пространственных
каналов наблюдения и курсовые углы направлений этих пространственных каналов.
Происходит накопление выходных эффектов пространственных
каналов по времени, которое реализовано на экспоненциальном накопителе.
Коэффициент накопления задается в окне графического интерфейса.
Далее вызывается блок анализа, в него передаются выходные
эффекты пространственных каналов, курсовые углы расположения источников
сигналов, порог разрешаемости, номер текущего цикла и общее количество опытов.
Из блока анализа полученный коэффициент и, при наличии,
степень разрешения целей выводятся в ГИП. Также там отображается амплитудный
график выходных эффектов пространственных каналов по горизонтальной плоскости.
При приходе из блока анализа признака окончания моделирования, цикл обрывается
(break). Можно принудительно
оборвать цикл, нажав кнопку «Стоп» в ГИП. Если номер текущего цикла не превысил
количество опытов (нет признака окончания из блока анализа), то цикл
повторяется. Завершение работы программы (выход из цикла функционирования)
видно на графическом интерфейсе по включенной кнопке «Стоп».
Модель антенны
Формирование антенны производится в трехмерном пространстве,
по основным геометрическим законам [15]. Каждый элемент антенны
(электроакустический преобразователь) представляется в виде трех его координат.
Поскольку антенна является цилиндрической ее можно представить как несколько
поясов, расположенных друг над другом на заданном расстоянии. Изначально рассчитываются
координаты для элементов одного пояса моделируемой антенны в двумерной
плоскости (рисунок 9). За начало координат принимается центр антенны, и тогда
значения координат получатся:
 ,
,
 ,
,
где α - угол положения i-го элемента антенны
относительно ее диаметральной плоскости, r - радиус антенны.
Рисунок 9 - Координаты элементов пояса цилиндрической антенны
После расчета двумерных координат для представления антенны в
трехмерном пространстве рассчитывается третья координата ее элементов (рисунок
10), которая для каждого пояса будет одна и равняется
где d - расстояние между элементами по вертикали, j - порядковый номер
пояса.
Рисунок 10 - Расстояние между поясами цилиндрической антенны
Помимо расчета координат элемента отдельно создается массив с
углами расположения элементов относительно диаметральной плоскости, которые
используются далее в программе.
Задание входных сигналов
Сигналы от объектов создаются во временной области циклично.
Параметры сигналов (уровень, частота и пр.) указываются вГИП, либо,
непосредственно, в модуле задания входных сигналов. Так же есть возможность
использования в качестве сигнала от объекта сигнала, сохраненного в звуковом
файле типа wav. При этом сигнал из файла считывается последовательно при
переходе к следующему циклу программы. Полученные сигналы используются при
создании поля антенны.
Формирование выходов элементов антенны
Рассчитываются временные задержки прихода фронта сигнала на
элементы антенны. Сигнал с введенными задержками и амплитудным коэффициентом,
определяемым направленностью ХН одного элемента антенны прибавляется к полю
(накопленному сигналу за этот период) этого элемента.
Область антенны, на которую падает сигнал, вычисляется,
основываясь на углах расположения элементов антенны рассчитанных в предыдущей
функции и угле прихода сигнала в горизонтальной плоскости. Эта область
определяется как направление прихода сигнала в горизонтальной плоскости ± 90°.
Рассчитываются коэффициенты канонического уравнения плоскости
в пространстве по формуле [15]:
Аx+By+Cz+D=0, где= (y2 - y1)∙ (z3
- z1) - (y3 - y1)∙ (z2 - z1);=
(x2 - x1)∙ (z3 - z1) - (x3
- x1)∙ (z2 - z1);= (x2 - x1)∙
(y3 - y1) - (x3 - x1)∙ (y2
- y1); = - Ax0-By0-Cz0;
Тогда расстояние от точки до плоскости определяется по
формуле:

 - нормирующий множитель.
- нормирующий множитель.
Считается на момент выполнения расчетов, что плоскость волны сигнала
приходит через первый элемент антенны. Этот элемент является первой точкой
плоскости фронта волны сигнала, остальные две рассчитываются по заданным
горизонтальному и вертикальному углам прихода сигнала:
x3 = x1, y2 = y1;3 = sin (φp/180°) + y1;3 = cos (φp/180°) + z1;2 = cos (ψp/180°) + x1;2 = sin (ψp/180°) + z1,
где φи ψ - углы по вертикали и горизонтали соответственно.
По полученному уравнению плоскости вычисляется расстояние
между каждым элементом антенны и плоскостью волны. Зная скорость звука в воде,
легко определяется временная задержка прихода плоской волны сигнала.
τi =c∙li,
где с - скорость звука в воде (приравнивается к 1500 м/с), li - расстояние между i-м элементом антенны и
плоскостью волны.
К имеющемуся полю элемента прибавляется сигнал, заданный в
параметрах запуска этой функции в главном цикле, с введенной временной
задержкой, умноженный на амплитудный коэффициент для текущего элемента. Поле
элемента, как и сигнал, представляется в частотной области.
Формирователь выходных эффектов
Функционирование блока формирования диаграммы направленности
аналогично блоку добавления сигналов. А именно, в нем проводится расчет
коэффициентов канонического уравнения плоскости компенсации, определение
рабочего сектора приемной антенны, вычисление временных задержек, вносимых в
сигналы, пришедшие на элементы рабочего пятна антенны для компенсации этого
рабочего сектора до плоской антенны.
На один рабочий сектор может приходиться несколько
пространственных каналов находящихся в диапазоне углов γ ±β/2, где γ - направление центральной
оси рабочего сектора, β - угловое расстояние между
столбами антенны.
Поскольку антенна цилиндрическая, то при смещении рабочего
сектора на один столб мы можем воспользовавшись рассчитанными задержками для
предыдущего рабочего сектора получить диаграммы направленности в этом рабочем
секторе для таких же пространственных каналов относительно центра рабочего
сектора.
В зависимости от выбранного алгоритма формирования
пространственных каналов происходит обработка сигналов элементарных каналов в
рабочем секторе с введенными задержками по формуле (1), (2) или (3) для
конкретного пространственного канала. Результат вычисления пространственного
канала записывается в массив пространственных каналов наблюдения, который
является выходом этого блока.
Статистическая обработка
Для проведения оценки разрешающей способности по
горизонтальной плоскости по уровню минус 3 дБ (0,5 раз) от слабой из
разрешаемых целей необходимо определить уровень выходного эффекта в
пространственных каналах направленных на источники сигналов и минимальный
уровень выходного эффекта между ними. Уровень выходного эффекта по направлению
на сымитированный источник сигнала определяется по уровню в пространственном
канале, соответствующему направлению на сигнал ±(расстояние между ПК)/2. Далее
определяется минимальный уровень выходного эффекта по направлению на сигнал,
затем на это значение делится значение минимального выходного эффекта между
сигналами:
где А и В-уровни выходных эффектов в направлении на первый и
второй источники сымитированных сигналов.
Полученный результат сравнивается с пороговым (0,5 раз). При
превышении порога считается, что цели не разрешаются, в противном случае
считается, что разрешаются.
В случае, если цели разрешаются, к показателю разрешаемости
прибавляется единица. По окончанию анализа, когда номер цикла сравняется с
количеством опытов, коэффициент разрешаемости делится на количество опытов.
Таким образомполучается степень разрешения целей при выбранных параметрах. Блок
анализа записывает в файл исходные параметры модельного исследования и значение
степени разрешения целей, а также он выдает в главный модуль признак окончания
моделирования и значения степени и коэффициента разрешения целей.
.3
Графический интерфейс пользователя
Для управления и отображения результата функционирования
программной модели используется ГИП, поэтому он содержит инструменты, такие как
кнопки, всплывающие списки, поля для ввода данных, графический индикатор и т.п.
ГИП используемый для работы с рассматриваемой программной моделью представлен
на рисунке11.
Изображенный на рисунке ГИП позволяет наблюдать результаты,
оперативно управлять вычислительным процессом программной модели и изменять ее
параметры, такие как:
- угловое расположение источника
имитируемого сигнала относительно диаметральной плоскости приемной антенны (КУ
- в горизонтальной плоскости и УН - в вертикальной плоскости);
- амплитудный уровень имитируемых сигналов;
- частота тонального сигнала;
- коэффициент временного накопления
пространственных каналов наблюдения;
- уровень шумов в элементарных каналах;
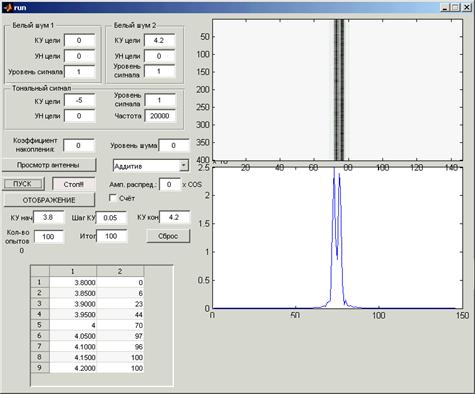
Рисунок 11 - Графический интерфейс пользователя
- амплитудное распределение элементарных
каналов в горизонтальной плоскости в рабочем секторе пространственного канала.
Необходимый алгоритм обработки сигналов (аддитивный,
мультипликативный, нормированный мультипликативный) с элементарных каналов при
формировании ПК выбирается при помощи раскрывающегося списка ГИП.
Кнопка «Просмотр антенны» предназначена для отображения
изображения трехмерной модели сымитированной приемной антенны во всплывающем
окне.
В правой части ГИП отображаются амплитудный график откликов
пространственных каналов («быстрый» обзор по горизонтали). По оси абсцисс
графика расположены пространственные каналы, по оси ординат - энергия, в
условных единицах.
Кнопка с функцией «Отображение» предназначена для включения
вывода амплитудного графика веера пространственных каналов наблюдения на ГИП.
Возможность отключения вывода графика позволяет получить прирост в
производительности программной модели, поскольку блок анализа автоматизирован,
и необходимость визуального контроля за процессом моделирования отсутствует.
Для автоматизации процесса вычислений предусмотрена установка
диапазона изменения угловых расстояний между имитируемыми источниками сигнала
(«КУ нач», «КУ кон») с желаемым шагом («Шаг КУ»). При выполнении
экспериментального исследования (включения блока анализа) в таблице,
расположенной в левом нижнем углу, будет фиксироваться текущее угловое
расстояние между целями и количество разрешений целей по принятому порогу. При
наборе нужного количества опытов блок анализа не останавливает выполнение, а
изменяет угловое расстояние в соответствии с «КУ нач», «КУ кон» и «шаг КУ».
В области ввода текста «Кол-во опытов» указывается количество
опытов на каждом угловом расстоянии между целями. В окошке «Итог» выводится
количество разрешений целей при текущем расстоянии между ними на текущий цикл.
Кнопка «Сброс» позволяет обнулить количество разрешений. При установке флажка
«Счет» подключается блок анализа к программе, при снятии флажка выполнение
программы останавливается (включается кнопка «Стоп»).
Кнопка «Пуск» предназначена для запуска программной модели.
кнопка «Стоп» служит для остановки программной модели и индикации состояния
функционирования (если кнопка включена - программа остановлена, если выключена
- выполняется).
5. Модельное исследование алгоритмов формирования ПК
Для обеспечения безопасности плавания ТПЛ, особенно перед всплытием,
необходимо иметь четкую картину ближней надводной обстановки. Для определения
количества надводных «препятствий» и для наилучшего оценивания параметров их
движения следует иметь наилучшее разрешение по пространству каналов наблюдения.
Наиболее гибким (в плане модернизации) элементом в такой ГАС ШП является ЦВК,
который включает в себя реализацию алгоритма формирования веера ПК и систему
отображения обработанной информации. Как известно, чем меньше ширина
характеристики направленности ПК, тем больше разрешение. Для манипуляции
шириной ХН можно применять различные алгоритмы формирования ХН, обеспечивающие
различную ширину ХН, такие как: аддитивный; мультипликативный и нормированный
мультипликативный алгоритмы.
Для исследования разрешающей способности ГАС ШП было решено
взять 2 цели с различными значениями соотношений уровней сигнала и углов
расположения источников имитируемых сигналов относительно диаметральной
плоскости антенны по горизонтали. Накопление было выбрано - 8 мс, при
количестве опытов - 100. Курсовой угол и уровень сигнала первой цели решено
было оставить неизменным. Для второй цели курсовой угол определялся угловым
расстоянием между целями. Пределы углового расстояния между целями для каждого
соотношения уровней сигналов определялись экспериментально. Шаг изменения
углового расстояния был выбран 0,05. Уровень сигнала от второй цели в процессе
анализа изменялся от 1 до 10 с шагом 1 вручную. Также при моделировании углы
наклона обеих целей было решено принять нулевыми, т.к. рассматриваемая приемная
антенна имеет довольно широкую ХН по вертикали и в приемном тракте не
предусмотрено формирование веера ХН по вертикали. Коэффициент амплитудного
распределения устанавливался для каждого опыта индивидуально.
Основой анализа разрешающей способности трёх алгоритмов
является критерий Рэлея [6], согласно которому два точечных объекта могут быть
разрешены, если между максимумами откликов от них наблюдается провал до -3 дБ
от уровня отклика слабой цели.
При моделировании, для упрощения модели и уменьшения нагрузки
на компьютер, было решено идеализировать внешнюю среду, т.е. не учитывать
искажения сигналов при прохождении водной среды от цели до приемной антенны.
Помимо этого в данной модели не учитывается возможный разброс характеристик
элементов имитируемого комплекса, таких как чувствительность приемников
антенны, коэффициенты передачи каналов АПО и прочее.
Также при выполнении первичного сравнительного анализа
алгоритмов обработки сигналов было решено не учитывать влияние помехи (шумов
водной среды, шумов усилителей и АЦП), т.е. рассматривать принятые сигналы от
целей без подачи шумовой составляющей на приемники.
5.1
Влияние амплитудного распределения на характеристики ГАС ШП
Для анализа влияния амплитудного распределения [8] на
разрешающую способность ГАС ШП были рассмотрены 3 его вида: с отрицательным
косинусным: Am = 0,5 - 0,5∙cos(γm), где γm - угол между направлением оси симметрии
апертурного окна и угловым положением m-го приёмного элемента (рисунок 12а),
без амплитудного распределения: Am = 1 (рисунок 12б) и с положительным косинусным
законом формирования амплитудного распределенияAm = 0,5 + 0,5∙cos(γm) (рисунок 12в). Нормированные ХН ПК для трёх
рассмотренных алгоритмов, полученные при таких амплитудных распределениях.
По построенным ХН видно, что нормированный мультипликативный
алгоритм при работе в полосе частот менее одной октавы имеет добавочные
максимумы, равные по уровню основному максимуму, при отрицательном косинусном
амплитудном распределении и без такого. Поэтому нормированный мультипликативный
алгоритм исследовался только с положительным косинусным амплитудным
распределением.
С помощью разработанной программы были построены диаграммы
направленности выбранных трёх типов алгоритмов обработки на заданной модели
приёмной антенны. Как видно, наименьшая величина ширины ХН по уровню -3дБ у
мультипликативного алгоритма, однако следует принять во внимание значительные
(до 1/3 от максимума) отрицательные боковые лепестки, которые могут образовать
вокруг главного максимума «зону тени» для слабых сигналов. А ХН нормированного
мультипликативного алгоритма, помимо отрицательных боковых лепестков, содержит
и положительные, соизмеримые с уровнем основного лепестка.
Известно, что амплитудное распределение может подавить
добавочные максимумы ХН, но при этом платой за это будет расширение главного
максимума. На следующих слайдах представлены два типа амплитудного
распределения входных процессов.
После введения амплитудного распределения с положительным
косинусным законом формирования Am = 0,5 + 0,5∙cos(γm) было отмечено, что ХН «повели» себя согласно
теории: Главный максимум чуть расширился (0,20) и уровень бокового
поля снизился. Особенно это заметно при применении нормированного
мультипликативного алгоритма.
При введении амплитудного распределения с отрицательным
косинусным законом формированияAm= 0,5 - 0,5∙cos(γm) было отмечено уменьшение ширины ХН всех трёх
алгоритмов на 0,20 с увеличением уровня боковых лепестков.
Поскольку ХН нормированного мультипликативного алгоритма
имеет добавочные максимумы, соизмеримые с основным при отрицательном
амплитудном распределении и без него, нормированный мультипликативный алгоритм
далее рассматривался только при применении положительного косинусного
распределения.
5.2
Качественное сравнение алгоритмов формирования ПК
Для предварительной оценки применимости рассматриваемых
алгоритмов в разрабатываемой ГАС ШП при наблюдении за целями (источниками
сигналов) на разработанной программной модели была рассмотрена ситуация
нахождения двух целей, отстоящих друг от друга на 4°. Уровень сигнала от одной
цели (на рисунке - правая) был ниже в 5 раз, чем от другой. Поскольку выбран
довольно высокий порог обнаружения (6 раз), в модели уровень помехи, для
упрощения моделирования, был приравнен к нулю.
Следует принять во внимание, что при отображении (выводе на
экран оператора) полученного пространственного процесса (веера каналов
наблюдения) аддитивный алгоритм требует применения процедур центрирования
(вычитание из пространственного процесса составляющей помехи), а в
мультипликативных отрицательные значения пространственного процесса
отбрасываются (приравниваются к нулю). Однако, в ходе анализа центрирование не
проводилось из-за отсутствия составляющей помехи.
В мультипликативных алгоритмах максимум отклика от слабого
сигнала смещен в сторону от сильного, что можно объяснить влиянием
отрицательного бокового поля отклика сильного сигнала. В аддитивном алгоритме
такое смещение не наблюдается, однако «провал» между откликами от сигналов не
значителен, т.е. плохо различим визуально. При этом в нормированном
мультипликативном алгоритме отметка от слабого сигнала соизмерима по уровню с
отметкой от сильного, что может говорить о высоком потенциале нормированного
мультипликативного алгоритма по выделению слабых сигналов при наличии сильного.
Следует принять во внимание, что отклик нормированного мультипликативного
алгоритма от помехи так же может иметь довольно высокий уровень. Однако, если
помеха не стационарна, то с введением временного накопления результирующий
отклик от неё должен быть невысокого уровня.
Для сравнения индикаторных картин веера пространственных
каналов при использовании рассматриваемых алгоритмов с помощью программной
модели была сымитирована ситуация пересечения двух целей на фоне
некоррелированного по пространству шума нормального вида (белый шум).
Соотношение уровней шумов целей выбрано - 5 раз. Одна из них (слабая) с
постоянным пеленгом, другая перемещается по горизонту с постоянной величиной
изменения пеленга.
Индикаторная картина полученная с применением аддитивного
алгоритма отцентрирована по среднему уровню помехи. При створе целей их отклики
постепенно сливаются и становятся трудно различимыми. Однако, при расхождении
суммарный отклик расширяется и оператор может интуитивно предположить взаимное
расположение целей по горизонту.
По индикаторной картине, полученной с применением
мультипликативного алгоритма можно сказать, что сигнальные отклики содержат
окантовку по пространству, обусловленную наличием отрицательных боковых
лепестков, которая визуально добавляет резкость отметке от сигнала. Однако
отклики от слабых сигналов могут полностью подавиться «окантовкой» отклика
сильного сигнала.
На индикаторной картине, полученной с применением
нормированного мультипликативного алгоритма, наблюдается довольно высокий
уровень помехи. Но окантовка сигнальных откликов почти полностью подавляет эту
помеху, как и другие слабые сигналы. Поэтому требуется тщательный выбор
алгоритма предындикаторной обработки. Выбором параметров формирования ПК можно
снизить влияние негативных особенностей конкретного алгоритма.
5.3
Количественное сравнение разрешающей способности алгоритмов формирования ПК
Исследование проводилось для трёх алгоритмов обработки
(аддитивного, мультипликативного и нормированного мультипликативного) с
выбранными амплитудными распределениями при различных соотношениях уровней двух
сигналов (от 1 до 10) при различном угловом отстоянной двух сигналов (числовые
данные приведены в приложении Г). Для упрощения моделирования уровень помехи
был приравнен к нулю (довольно высокий порог обнаружения - 6 раз), а так же
отключен экспоненциальный накопитель (время накопления одного цикла
формирования ПК - 8 мс).
Экспериментально было установлено, что с увеличением времени
накопления до принятого - в 1 сек, область возрастания степени разрешения от 0
к 100 уменьшается и стремится к значению углового расстояния, равному 50%.
Таким образом, за итоговое значение разрешающей способности (границы
неразрешения) принималось значение углового расстояния между целями, при
котором коэффициент разрешаемости равнялся 50%.
В целом полученные результаты показывают, что угловая зона
неразрешения мультипликативных алгоритмов обработки меньше аддитивной на
величину (0,1 - 0,5)φА3дБ, где φА3дБ - ширина ХН при аддитивном алгоритме обработки. Значения ширины
основных максимумов полученных ХН по уровню минус 3 дБ от максимума приведены в
таблице 4.
Таблица 4. Ширина ХН ПК для трёх типов обработки
|
Амплитудное распределение Алгоритм
|
  
|
|
|
|
Аддитивный
|
2,470
|
2,720
|
2,960
|
|
Мультипликативный
|
1,750
|
1,940
|
2,130
|
|
Нормированный мультипликативный
|
1,810
|
2,040
|
2,250
|
Учитывая, что у ТПЛ не стоит задача поиска малошумящих целей,
для наилучшего разрешений целей можно рекомендовать применение в ГАС ШП ТПЛ
мультипликативного алгоритма после проведения дополнительных исследований ОСП и
характеристик в вертикальной плоскости.
Указанные исследования показывают, что на данном этапе в
высокочастотных ГАС ШП следует одновременно применять все три вида обработки с
одновременным выводом на индикатор изображения двух типов графического
представления трас обнаруживаемых надводных кораблей по результатам аддитивной
обработки и по одному из вариантов мультипликативной обработки по выбору
оператора (индикаторная картина второго варианта мультипликативной обработки
при этом хранится в памяти ЦВК и может быть вызвана на экран по решению
оператора). Картины отображения индикаторных процессов можно располагать
относительно друг друга по вертикали или по горизонтали.
5.4
Моменты, требующие дополнительного рассмотрения
Следует учесть, что при проведении сравнительного анализа не
учитывалось влияние бокового поля откликов от целей. Но, было отмечено, что в
аддитивном алгоритме отклик от слабой цели маскируется боковым полем от
сильной, а в мультипликативных алгоритмах, из-за наличия отрицательного
бокового поля, при сближении отклик от слабой цели вообще исчезает (уходит в
отрицательную область).
Также в процессе исследований мультипликативных алгоритмов
обработки было замечено, что при сближении целей отклик от слабой уменьшается и
смещается от сильной цели до величины φА3дБ. Точность пеленгации при
взаимном влиянии откликов от нескольких целей требует проведения дополнительных
исследований.
Поскольку на уровень отклика от слабой цели и на отклик ПК
между целями влияет боковое поле, то результаты анализа могут быть неточными.
При дальнейшем исследовании алгоритмов обработки желательно рассмотрение
влияния бокового поля сильной цели на слабую.
Нормированный мультипликативный алгоритм ограничен в
применении из-за появления больших добавочных максимумов без применения
амплитудного распределения. Однако его особенностью является нормирование
откликов от разных по энергии целей. Даже при разнице энергий сигналов в 10 раз
уровень отклика этих целей будет одинаковым при использовании нормированного
мультипликативного алгоритма. Этот вопрос заслуживает более тщательного
исследования.
Разрешающая способность алгоритмов формирования ПК на фоне
некоррелированной помехи требует дополнительного рассмотрения.
Заключение
сигнал плавание пеленгование гидроакустический
Результаты проведенной работы показывают перспективность
применения на автономных ТПЛ с водоизмещением свыше 500 тонн относительно
малогабаритных ВЧ ГАС ШП с одновременным использованием аддитивной и двух
вариантов мультипликативной обработки, которые обеспечивают возможность
обнаружения НК на дистанциях до 2,6 км в мелких морях при сложных
гидролого-акустических условиях.
В работе определены приемлемые для размещения на ТПЛ
технические габаритные размеры забортной аппаратуры (антенн), которые могут
уточняться, на базе примененных в исследовании методов в зависимости от
конкретного проекта ТПЛ и выбрана структурная схема облика ВЧ ГАС ШП.
Показано, что внедрение ГАС ШП на ТПЛ обеспечивает резерв по
времени на принятие решения по уклонению от столкновения с НК от 1,2 до 15,6
мин, в зависимости от скорости движения надводного судна и характера
гидролого-акустических условий.
Получены оценки разрешающей способности для трёх алгоритмов
формирования ПК при наличии на входе двух сигналов различных уровней. По
полученным результатам сделан вывод об эффективности мультипликативного
алгоритма формирования ПК для решения задач обеспечения безопасности ТПЛ. А так
же проведено визуальное сравнение индикаторных картин, полученных при различных
алгоритмах формирования веера ПК, в том числе и на фоне некоррелированной по
пространству помехи.
Определены возможные направления дальнейших исследований по
анализу характеристик ВЧ ГАС ШП.
Список литературы
1. http://www.korabel.ru/equipment/item_view/347622.html;
2. http://www.ussubmarines.com/submarines/luxury.php3;
3. Железный
В.Б., Островский Д.Б., Сапега А.В., Ярыгин В.А. Проблема обеспечения
навигационной безопасности плавания туристических подводных лодок // Труды
Шестой межд. конф. «Прикладные технологии гидроакустики и гидрофизики -
ГА-2002». СПб., 2002 г.;
4. N.E. Gorlanov, D.B. Ostrovsky, A.V. Sapega, V.A. Yarygin, V.B. Zhelezny. Estimation of
short-range sonar capabilities in navigation safety // 2nd Intern.
Conf. «Navy and Shipbuilding Nowadays» - NSN’2001, 4-6.12.2001. St.-Petersburg,
2001 г.;
5. Ю.А.
Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника - Санкт-Петербург,
«Наука», 2004 г.;
6. Allan V. Oppenheim. Applicashionsof Digital Signal
Processing, Prentice-Hall? Inc., Engleewood Cliffs, New Jersey, 1978;
7. Fakley D.C. Time Averaged Product Array, JASA, 31,1959;
8. Роберт
Дж. Урик. Основы гидроакустики / Перевод с англ. - Л.: Судостроение, 1978 г.;
. Андрианова
М.С., Чернова А.С. Первичная оценка возможности использования гидроакустических
станций шумопеленгования на туристических подводных лодках // Тр. Второй
молодежной конф. «Прикладные технологии гидроакустики и гидрофизики». СПб, 2011
г.;
. Колчеданцев
А.С. Гидроакустические станции - Л.: Судостроение, 1982 г.;
. Евтютов
А.П., Митько В.Б. Инженерные расчеты в гидроакустике, 2-е изд. - Л.:
Судостроение, 1988 г.;
. Тебякин
В.П. и др. Raymod52 - базовый комплекс программ для вычисления звуковых полей в
слоисто-неоднородном океане лучевым методом // Отчет АКИН. М.: АКИН, 1990.
. Ануфриев
И.Е., Смирнов А.Б., Смирнова Е.Н. MATLAB 7 - СПб.: БХВ-Петербург, 2005 г.;
. Сергиенко
А.Б. Цифровая обработка сигналов, 3-е изд. - СПб.: БХВ-Петербург, 2011 г.;
. Ильин
В.А., Позняк Э.Г. Аналитическая геометрия. - М.: ФИЗМАТЛИТ, 2002 г.