Система автоматического управления легкого маневренного самолета
Министерство
общего и профессионального образования Российской Федерации
Казанский
Национальный Исследовательский Университет им. А.Н.
Туполева
ПОЯСНИТЕЛЬНАЯ
ЗАПИСКА
к курсовой
работе по дисциплине
ПРОЕКТИРОВАНИЕ
СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ
тема
курсовой работы:
Система
автоматического управления легкого
маневренного самолета
Выполнил
руководитель:
студент
группы 3508
Табайчев
А.С.
Казань 2012
Оглавление
Введение
1.
Выбор и обоснование законов управления
.1
Выбор законов управления в канале руля направления
1.2
Выбор законов управления в канале элеронов
1.3 Выбор
законов управления для движения тангажа
.4
Закон управления рулем высоты при угловой стабилизации
1.5
Стабилизация летательного аппарата относительно трех осей
1.6
Закон управления автопилота в режиме управления скоростью полета
1.7
Управление с заданной перегрузкой
2.
Выбор привода системы управления
3.
Выбор оптимальных передаточных чисел автопилота крена
4.
Описание структурно-функциональной схемы САУ
Заключение
Список
использованной литературы
Введение
В современной авиации более глубокое
развитие автоматизации полёта получили системы автоматического управления (САУ
или АБСУ
<#"667288.files/image001.gif"> (1)
Запишем систему уравнений, считая 
Разрешим данную систему уравнений
относительно Zg;
продифференцируем 2-ое уравнение:  , подставим 1-е уравнение
, подставим 1-е уравнение  , подставим
уравнение 3, получим:
, подставим
уравнение 3, получим:  , где
, где  -
неизвестное управление. Для устойчивости систему необходимо и достаточно, чтобы
-
неизвестное управление. Для устойчивости систему необходимо и достаточно, чтобы
 . Получим
. Получим  , выбирая
, выбирая  и
и  мы можем
обеспечить любой желаемый вид переходного процесса.
мы можем
обеспечить любой желаемый вид переходного процесса.
Точность выдерживания заданной
траектории полета зависит от постоянной составляющей ветра. Если  , то правая
часть в среднем =0 отсюда видно, что по завершении переходного процесса, когда
, то правая
часть в среднем =0 отсюда видно, что по завершении переходного процесса, когда  ,
,  то есть
система управления центром масс в боковой плоскости, построенная по принципу
управления рысканием не допускает появления статической ошибки при действии на
самолет постоянного ветра. Посмотрим,, какими будут остальные параметры
движения ЛА. , тогда
то есть
система управления центром масс в боковой плоскости, построенная по принципу
управления рысканием не допускает появления статической ошибки при действии на
самолет постоянного ветра. Посмотрим,, какими будут остальные параметры
движения ЛА. , тогда  то есть
то есть  , а из 2-го
уравнения находим, что
, а из 2-го
уравнения находим, что  .
.
Какой должна быть система управления,
реализующая такой полет? Запишем уравнение системы, построенной по принципу
управления рысканием:

как только появилось скольжение,
датчик скольжения выдаст сигнал.  - формирование заданного крена.
- формирование заданного крена.
Очень часто сигнал с датчика
скольжения заменяется сигналом  - сигнал боковой перегрузки.
- сигнал боковой перегрузки.

Вспомним уравнение сил в боковом
движении, при 
 , следовательно
, следовательно  и
и 
 , а
, а  , тогда
, тогда  ,
,  ,
,  , то есть
сигнал скольжения может быть заменен сигналом боковой перегрузки. Часто, чтобы
убрать скольжение законы управления пишут:
, то есть
сигнал скольжения может быть заменен сигналом боковой перегрузки. Часто, чтобы
убрать скольжение законы управления пишут:  или
или  , когда
, когда 
 ,
,  .
.
Наиболее распространенным законом управления в
канале руля направления является закон вида:
 (1.1)
(1.1)
Где  - статические передаточные числа.
- статические передаточные числа.
Причем, сигнал по β заменяется
сигналом по боковой перегрузке nz.
Скольжение β связано с
перегрузкой соотношением  , тогда
уравнение (1.1) примет вид:
, тогда
уравнение (1.1) примет вид:
 (1.1.2)
(1.1.2)
Где 
1.2 Выбор законов управления в
канале элеронов
Законы управления системы
построенной по принципу управления скольжением в режиме стабилизации центра
масс в боковой плоскости, на заданной траектории имеют следующий вид:
 (2.1)
(2.1)
 - отклонение самолета от заданного
направления.
- отклонение самолета от заданного
направления.  - при
реализации системы по принципу управления скольжением. Для того, чтобы
уменьшить отклонение самолета
- при
реализации системы по принципу управления скольжением. Для того, чтобы
уменьшить отклонение самолета  от заданного направления полета
необходимо увеличить коэффициент передачи
от заданного направления полета
необходимо увеличить коэффициент передачи  .
.
Наиболее распространенным законом
управления в канале элеронов является закон вида:
 , (2.2)
, (2.2)
Где 
 - статические передаточные числа,
- статические передаточные числа,  - заданный
угол крена.
- заданный
угол крена.
 .
.
 - заданный угол курса.
- заданный угол курса.
1.3 Выбор закона управления для
движения тангажа
Надо отметить, что выбор параметров статического
закона управления вида:
 для движения тангажа, сопряжено с
некоторыми трудностями. Очень просто выбираются передаточные числа закона
управления, когда в закон управления включается сигнал по углу атаки. Закон
управления рулем высоты при угловой стабилизации будет выглядеть следующим
образом:
для движения тангажа, сопряжено с
некоторыми трудностями. Очень просто выбираются передаточные числа закона
управления, когда в закон управления включается сигнал по углу атаки. Закон
управления рулем высоты при угловой стабилизации будет выглядеть следующим
образом:
 (3.1)
(3.1)
Особенность: Закон управления
записан в идеальной форме, в нем не учтены скоростная характеристика привода и
постоянная времени разомкнутого привода. Такой подход здесь допустим в силу
того, что движения тангажа, является менее динамичным по сравнению с движением
крена.
1.4 Выбор закона управления руля
высоты при угловой стабилизации
Автоматическая стабилизация высоты полета
производится в тех случаях, когда необходимо выдержать горизонтальный режим
полета на заданной высоте. При этом за исключением полета на малых высотах,
обычно осуществляется стабилизация барометрической высоты на уровне,
соответствующем заданному статическому давлению. Решая задачу управления
высотой полета, будем считать, что скорость полета самолета постоянна, а
управление высотой происходит посредством руля высоты.
Будем рассматривать случай управления
летательным аппаратом при полной информации о векторе состояния объекта.
Итак, будем считать, что все компоненты вектора
состояния используются при формировании закона управления автопилота. В виду
стабилизации воздушной скорости полета, уравнения продольного движения самолета
возьмем в виде:
При описании привода автопилота пренебрежем его
постоянной времени, что вполне оправданно, так как высота полета самолета
является траекторным и, следовательно, медленно изменяющимся во времени
параметром полета по сравнению со скорость перекладки руля высоты. Тогда закон
управления высотой полета при наличии полной информации о векторе состояния
будет иметь вид:
 (4.1)
(4.1)
 - отклонение текущего угла тангажа
от заданного, определяющего горизонтальный режим полета;
- отклонение текущего угла тангажа
от заданного, определяющего горизонтальный режим полета;  - отклонение
текущей высоты полета от заданной.
- отклонение
текущей высоты полета от заданной.
1.5 Стабилизация летательного
аппарата относительно трёх осей
Главными осями устойчивости самолета называются
три взаимно перпендикулярные оси, пересекающиеся, в центре тяжести самолета:
XX-ось поперечной устойчивости; YY-ось курсовой устойчивости; ZZ-ось
продольной
устойчивости.
Самолет в полете может совершать колебания
относительно всех трех осей одновременно.
Для того чтобы самолет летел без поперечных
кренов, необходимо иметь механизм, предотвращающий наклоны самолета вокруг оси
XX, т. е. обеспечивающий поперечную стабилизацию. Для сохранения неизменной
высоты полета и предотвращения снижения или подъема самолета нужна продольная
стабилизация, препятствующая вращению самолета вокруг оси ZZ. Наконец, для
сохранения прямолинейности полета и неизменного курса самолета нужно иметь
курсовую стабилизацию, препятствующую вращению самолета вокруг оси YY.
Выберем законы управления в виде
 ;
;
 ; (5.1)
; (5.1)
 .
.
где  -
статические передаточные числа.
-
статические передаточные числа.
Ввод сигнала по  в
канал руля высоты необходим что бы предупредить потерю высоты при случайном
крене и независимо от знака крена увеличить угол атаки самолёта.
в
канал руля высоты необходим что бы предупредить потерю высоты при случайном
крене и независимо от знака крена увеличить угол атаки самолёта.
1.6 Выбор закона управления
автопилота в режиме управления скорости полета
При управлении скоростью полета через тягу
двигателя сигнал, пропорциональный отклонению скорости полета от заданного
значения, поступает на механизм управления рычагом двигателя, который
отклоняясь регулирует подачу топлива в камеру сгорания двигателя. Существующие
авиационные двигатели часто снабжены автоматом тяги и поэтому нет необходимости
в систему управления скорости полета вводить специальный исполнительный
механизм, в этом случае только предусматривается только лишь электрическая цепь
подачи сигнала в автомат тяги двигателя, который часто называют регулятором
двигателя. Закон управления:
 U - сигнал в
регулятор двигателя
U - сигнал в
регулятор двигателя
Часто  пропускают через апериодический
фильтр с тем, чтобы отсеять высокочастотные составляющие, вызванные
турбулентностью атмосферы
пропускают через апериодический
фильтр с тем, чтобы отсеять высокочастотные составляющие, вызванные
турбулентностью атмосферы  закон
управления (!) обеспечивает астатическое регулирование по скорости, в этом
случае канал руля высоты работает автономно и обеспечивает стабилизацию либо
высоты полета, либо только стабилизацию угла тангажа. Поэтому при решении
задачи управления высотой полета добавляются два условия с целью упрощения:
закон
управления (!) обеспечивает астатическое регулирование по скорости, в этом
случае канал руля высоты работает автономно и обеспечивает стабилизацию либо
высоты полета, либо только стабилизацию угла тангажа. Поэтому при решении
задачи управления высотой полета добавляются два условия с целью упрощения:
)  - упрощающее условие в системе
управления,
- упрощающее условие в системе
управления,
) в системе стабилизации угла
тангажа  .
.
При синтезе систем управления
воздушной скоростью полета считают, что равновесие моментов относительно
поперечной оси восстанавливается мгновенно, поэтому из системы уравнений
исключаются уравнения моментов и уравнение сил по нормали к траектории движения
ЛА. Таким образом совокупная система уравнений с учетом данного закона
управления будет иметь второй порядок и естественно не будет труда выбрать
передаточные числа  . При выборе
передаточного числа
. При выборе
передаточного числа  нужно
соблюдать осторожность, так как при больших его значения обороты двигателя
будут меняться в широких пределах то есть система управления будет вносить
большие возмущения в работу двигателя. Управление скоростью полета через тягу
двигателя применяют на этапе посадки самолета, когда выполняется заход на
осевую линию ВПП и снижение по глиссаде.
нужно
соблюдать осторожность, так как при больших его значения обороты двигателя
будут меняться в широких пределах то есть система управления будет вносить
большие возмущения в работу двигателя. Управление скоростью полета через тягу
двигателя применяют на этапе посадки самолета, когда выполняется заход на
осевую линию ВПП и снижение по глиссаде.
Закон управления будет иметь вид:
1.7 Управление с заданной
перегрузкой
Так как современные ЛА являются
многорежимными и скоростные напоры, действующие на них, изменяются в широких
пределах, то одному и тому же отклонению рулевого органа будут соответствовать
разные перегрузки, действующие на ЛА. Это естественно создает неудобства, и в
идеальном случае было бы желательно, чтобы одному и тому же отклонению рычага
управления соответствовала одна и та же перегрузка.
 ,(7.1)
,(7.1)
где  - перегрузка, V - путевая
скорость самолёта, g - ускорение свободного падения.
- перегрузка, V - путевая
скорость самолёта, g - ускорение свободного падения.
Из формулы (5.1) видно что:
 ,(7.2)
,(7.2)
где  - заданное значение угла тангажа.
- заданное значение угла тангажа.
Выберем закон управления по заданной
перегрузке в следующем виде:
 .
.
2. Выбор привода системы управления
Приводы в системе управления различаются по типу
обратной связи.
со скоростной обратной связью;
с жесткой обратной связью;
с комбинированной обратной связью:
с изодромной обратной связью.
Рассмотрим привод со скоростной обратной связью
(рис 8.1).
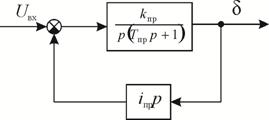
На рис.. показаны: iпр
- коэффициент передачи обратной связи; kпр
- коэффициент усиления привода; Tпр
- постоянная времени привода.
Охват скоростной обратной связью не меняет
характер звена, но коэффициент усиления в постоянная времени становятся меньше.
3. Выбор оптимальных параметров
системы управления высотой полёта
Автоматическая стабилизация высоты полета
производится в тех случаях, когда необходимо выдержать горизонтальный режим
полета на заданной высоте. При этом за исключением полета на малых высотах,
обычно осуществляется стабилизация барометрической высоты на уровне,
соответствующем заданному статическому давлению. Решая задачу управления
высотой полета, будем считать, что скорость полета самолета постоянна, а
управление высотой происходит посредством руля высоты. Будем рассматривать
случай управления летательным аппаратом при неполной информации о векторе
состояния объекта.
В виду стабилизации воздушной скорости полета,
уравнения продольного движения самолета возьмем в виде:
 ;
;
 ;(9.1)
;(9.1)
 .
.
При описании привода автопилота пренебрежем его
постоянной времени, что вполне оправданно, так как высота полета самолета
является траекторным и, следовательно, медленно изменяющимся во времени
параметром полета по сравнению со скорость перекладки руля высоты.
При идеальном описании сервопривода системы
закон управления рулём высоты возьмём в виде
 .(9.2)
.(9.2)
где  -
статические передаточные числа системы управления
-
статические передаточные числа системы управления
При неполной информации о векторе состояния
объекта в законе (9.2)  .
.
Запишем уравнения продольного движения
летательного аппарата (9.1) добавив к ним закон управления (9.2)
;
;(9.3)
;
 .
.
Запишем определитель системы (9.3)
 ,
,
где  ;
;
 ;
;
 ;(9.4)
;(9.4)
 ;
;
 .
.
При неполной информации о векторе состояния
объекта условием совместности системы (7.4) будет соотношение, представляющее
собой линейную зависимость между коэффициентами  характеристического
полинома:
характеристического
полинома:
 (9.5)
(9.5)
Найдём передаточные числа автопилота из
условия минимума критерия качества:
 .(9.6)
.(9.6)
Будем искать коэффициенты  доставляющие
минимум интегральной квадратичной оценке (9.6). По найденным коэффициентам и
определим необходимые передаточные числа из системы (9.4).
доставляющие
минимум интегральной квадратичной оценке (9.6). По найденным коэффициентам и
определим необходимые передаточные числа из системы (9.4).
Необходимо задать коэффициент  ,
диапазон его изменения может лежать в пределах 0.24-1.5.
,
диапазон его изменения может лежать в пределах 0.24-1.5.
Так же необходимо задать относительный
коэффициент затухания ξ.
Коэффициенты  определяются
из следующих формул:
определяются
из следующих формул:
В которых параметры х и у удовлетворять системе
алгебраических уравнений
 ;
;
 ,
,
где ν= ,
,
 .
.
а искомые решения системы (7.7) должны
принадлежать области
 (9.9)
(9.9)
Для экстремалей критерия качества (9.6) с
относительными коэффициентами затухания ξ=1(без
перерегулирования) и ξ=0.707 (с
перерегулированием) 2-ое уравнения системы (9.8) упрощается
 ;
;
 .
.
Для переходного процесса с перерегулированием:
 ;(9.11)
;(9.11)
Для переходного процесса без перерегулирования:
 ,(9.12)
,(9.12)
где  -
время переходного процесса.
-
время переходного процесса.
Решение системы (9.8) будет принадлежать области
(9.9) если
 ,(9.13)
,(9.13)
где  при
ξ=1
и
при
ξ=1
и
 при
ξ=0.707.
при
ξ=0.707.
Это условие не накладывает существенных
ограничений на выбор передаточных чисел системы управления высотой полёта
летательного аппарата.
Найдём коэффициенты для
беспилотного самолёта динамические коэффициенты которого в режиме полёта H=11000м,
V=265.68м/с
приведены в таблице (9.1)
|
Коэффициент
|

|

|

|

|

|
|
Значение
|
0,645
|
0.105
|
2.63
|
3.393
|
0.632
|
Выберем =0.8
c
Была составлена программа в пакете Matlab
Для переходного процесса с перерегулированием (ξ=0.707)
clcx y iteta
ih=265.68;=11000;=0.645;=0.105;=2.63;=0.632;=29.275;=0.8;=0.707;=21;=tp/3;=1;=cdteta+cdalpha+balpha+cv*idteta=balpha*(cdteta+cv*idteta)+calpha=solve((a1*x*((x*y)^0.25))/(tau2)+((1-(a1/balpha))*((1+x-y)/(tau2^2))*sqrt(x*y))-x*(x-y)*A,1-x-y);=double(Res.x);=double(Res.y);=find(x>0&y>0&x-y>0&x+y<=1&imag(x)==0);=x(tt)=y(tt)=(a1*(1+x-y)*sqrt(x*y))/((tau2^2)*x*(x-y))=(a1*(x*y)^0.75)/((tau2^3)*x*(x-y))2=(a3/balpha)+A
В итоге получили следующие результаты:
 ;
;
 ;
;
 ;
;
 .
.
По известным коэффициентам из
системы (7.4) нашли передаточные числа автопилота:
 ;
;
 c;
c;
 град/м.
град/м.
Необходимо знать, имеют ли место нули в
числителе передаточной функции. Нули в числителе могут увеличить время
переходного процесса. Чтобы узнать о наличии нулей в числителе запишем частный
определитель:
 .
.
Таким образом, передаточная функция запишется в
следующем виде:
 .(9.14)
.(9.14)
Как видно из формулы (9.14) нулей в числителе
передаточной функции нет.
На рисунке (9.1) представлен график переходного
процесса системы (9.14)
На управляющее воздействие  =60м
=60м
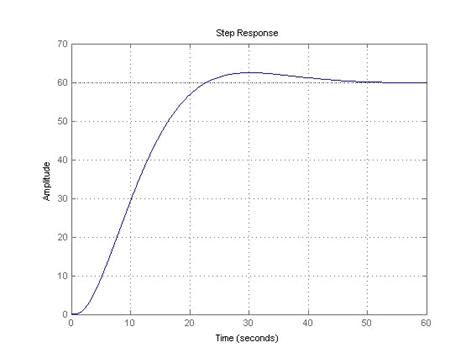
Рис 9.1
Как видно из рис 9.1 время регулирования по
высоте полета равно 21с. Таким образом, мы обеспечили необходимое качество
регулирования высоты полета.
Для переходного процесса без перерегулирования (ξ=1)
clcx y iteta
ih=265.68;=11000;=0.645;=0.105;=2.63;=0.632;=29.275;=1;=0.5;=1;=0.4;=20=cdteta+cdalpha+balpha+cv*idteta=tp/4.74=balpha*(cdteta+cv*idteta)+calpha=solve((a1*x*((x*y)^0.25))/(tau2)+((1-(a1/balpha))*((1+x-y)/(tau2^2))*sqrt(x*y))-x*(x-y)*A,-y+((sqrt(x)-1)^2));=double(Res.x);=double(Res.y);=find(x>0&y>0&x-y>0&x+y<=1&imag(x)==0);=x(tt)=y(tt)=(a1*(1+x-y)*sqrt(x*y))/((tau2^2)*x*(x-y))=(a1*(x*y)^0.75)/((tau2^3)*x*(x-y))
В итоге получили следующие результаты:
 ;
;
 ;
;
 ;
;
 .
.
По известным коэффициентам из
системы (7.4) нашли передаточные числа автопилота:
 ;
;
c;
 град/м.
град/м.
Необходимо знать, имеют ли место нули в
числителе передаточной функции. Нули в числителе могут увеличить время
переходного процесса. Чтобы узнать о наличии нулей в числителе запишем частный
определитель:
.
Таким образом, передаточная функция запишется в
следующем виде:
.(9.15)
На рисунке (9.2) представлен график переходного
процесса системы (9.15). На управляющее воздействие =60м
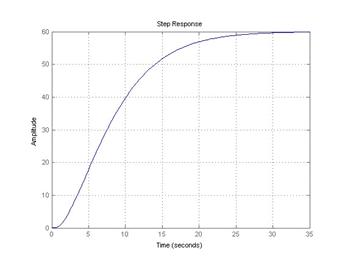
Рис 9.1
Время регулирования по высоте полета равно 21с.
Таким образом, мы обеспечили необходимое качество регулирования высоты полета.
. Описание структурно-функциональной
схемы САУ
Структурно-функциональная схема САУ состоит из 4
основных блоков:
) Канал элеронов.
) Канал руля направления.
) Канал руля высоты.
) Канал тяги двигателя.
В схеме введены следующие обозначения:
ДИСС - доплеровский измеритель скорости и сноса
 - датчик угловой
скорости по оси x
- датчик угловой
скорости по оси x
 - датчик угловой
скорости по оси y
- датчик угловой
скорости по оси y
 - датчик угловой
скорости по оси z
- датчик угловой
скорости по оси z
ГВ - гировертикаль
АКС - акселерометр
ДВС - датчик воздушной скорости
В - высотомер
Заключение
В ходе курсовой работы была разработана система
автоматического управления для легкого маневренного самолета, совершающего поет
на высоте Н = 11000м со скоростью V
=265.68 м/с. Были рассчитаны параметры автопилота продольного канала.
Были рассчитаны оптимальные передаточные числа
автопилота, стабилизирующего параметра стабилизации высоты полёта.
Также была разработана структурно-функциональная
схема САУ. Система осуществляет измерение пилотажно-навигационных параметров
движения JIA и передачу этих параметров на модуль автопилота. Модуль автопилота
вырабатывает управляющие команды на основании заложенных законов управления и
выдает управляющие сигналы на органы управления JIA (рулевые машины).
Список
использованной литературы
1. Романенко
Л. Г. Проектирование систем управления полетом летательных аппаратов. - Казань,
2004. - 180 с.
. Гуськов
Ю. П., Загайнов Г. И. Управление полетом самолетов: Учебник для авиационных
вузов. - М.: Машиностроение, 1980.- 213с.
. Белогородский
С. Л. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972. - 352
с.