Электропривод главного движения токарного станка
Белорусский национальный
технический университет
Кафедра робототехнических
систем
КУРСОВОЙ ПРОЕКТ
по дисциплине «Электрические
машины и автоматизированный электропривод»
Тема: « Электропривод
главного движения токарного станка»
Выполнил
Шагов Д. Н.
ст. гр.
107429
Проверил
Лившиц Ю. Е.
доц. каф. РТС
Минск 2012
Содержание
Введение
. Краткое описание технологического процесса
. Выбор технологического оборудования и анализ кинематической
схемы станка
. Предварительный выбор электродвигателя
.1 Определение составляющих времени нагрузочной диаграммы
.2 Определение сил и моментов, действующих в системе
электропривода. Приведение их к валу двигателя
.3 Построение приближенной нагрузочной диаграммы и её анализ
. Выбор и проверка двигателя
.1 Предварительный выбор двигателя
.2 Расчет динамических параметров привода
.3 Построение уточненной нагрузочной диаграммы
.4 Проверка электродвигателя
. Расчет механических характеристик и переходных процессов
при пуске и торможении
.1 Расчет механических характеристик
.2 Расчет переходных процессов при пуске и торможении
. Применение комплектного электропривода
.1 Обзор и анализ современных электроприводов
.2 Выбор комплектного электропривода и его характеристики
.3 Функциональная и структурная схемы электропривода
.4 Описание и работа электропривода
. Расчет расхода энергии и КПД за цикл работы
Заключение
Список используемых источников
Введение
Целью курсового проекта является отработка навыков проектирования
автоматизированного электропривода главного движения токарного станка, изучение
основных составляющих электропривода, проектирование электропривода для
станков, использующихся в конкретном технологическом процессе.
Технологический процесс - это часть производственного процесса,
непосредственно направленная на изменение состояния изделия. В технологическом
процессе принимает участие огромное число технологического оборудования, в том
числе и такое, в котором используются всяческие электроприводы. Электроприводы
по назначению подразделяются на:
· привод главного движения;
· привод подач;
· привод вспомогательных перемещений;
· привод промышленных роботов.
В состав электропривода входят:
· источник питания;
· преобразователь (тиристорный преобразователь и т.д.);
· электродвигатель (ДПТ, СД, АСД и т.д.);
· передаточное устройство;
· рабочий механизм.
В курсовом проекте разрабатывается привод главного движения. Электропривод главного
движения - это главный электропривод, обеспечивающий движение исполнительного
органа рабочей машины, выполняющего главную технологическую операцию.
В рамках курсового проекта требуется выбрать электродвигатель
и электропривод к нему. Для этого производяться расчеты режимов резания для детали типа вал (смотри
задание), выбирается необходимое технологической
оборудование, произведен анализ электродвигателя по обеспечению необходимых
требований (мощность, момент, разгон и торможение) и произведено описание
электропривода, его структурной схемы и схемы подключения к электродвигателю.
.
Краткое описание технологического процесса
При описании технологического процесса были использованы источники [1,2].
Деталь, исходя из задания к курсовому проекту, является ступенчатым валом, и
относиться к деталям типа тел вращения. Данную деталь будем обрабатывать на токарном станке.
Эскиз обрабатываемой детали представлен на рисунке 1.1.
Рисунок 1.1 - Эскиз обрабатываемой детали
Технологический процесс состоит из следующих этапов.
Материал детали выберем Сталь 45. Заготовку для данной детали получаем литьем либо штамповкой. Далее на
токарном станке прозводим черновое и чистовое точение.
При черновом точении снимается основной слой материала.
Выбираем следующие параметры(выбираем на основании методического пособия
«Технология и оборудование автоматизированного производства», Р.В. Новичихин,
Минск 2008):
глубина резания t = 5 мм;
шероховатость поверхности Rz 40;
Чистое точение является более точным. Для этого этапа
технологической обработки выбираем параметры:
глубина резания t = 0.5 мм;
шероховатость поверхности Rа 2.5;
2. Выбор технологического оборудования и анализ
кинематической схемы станка
При выборе технологического оборудования и анализ
кинематической схемы станка были использован источник [3].
Определяющим оборудованием для деталей типа тел вращения
являются токарные центровые и патронно - центровые станки. Токарные станки с
ЧПУ являются наиболее многочисленной группой в парке станков с ЧПУ. Их
выпускают в следующих исполнениях: центровые, патронные, патронно - центровые и
карусельные. В основном токарные станки имеют горизонтально расположенную ось
шпинделя. Между предельными размерами обрабатываемых деталей и основными
параметрами станков имеются определенные зависимости. Рекомендуемые модели
станков выбираются с учетом габаритов детали. Итого, станок выбирается по
технологическому процессу, а также по габаритным размерам обрабатываемой
детали.
Станок 16К20Т1 токарный с оперативной системой
управления
предназначен для токарной обработки наружных и внутренних поверхностей деталей
типа тел вращения различного
профиля. Обработка ведется в один или несколько рабочих ходов в замкнутом
полуавтоматическом цикле; на станке можно нарезать резьбы. Станок выпускают в
двух исполнениях: 16К20Т1, 16К20Т1.01.
Приведенный станок имеет следующие технические
характеристики:
Наибольший диаметр обрабатываемой заготовки, мм
Над станиной…………………………………………………………500
Над суппортом…………………………………………………………215
Наибольшая длина обрабатываемой заготовки, мм……………….1000
Частота вращения шпинделя,  …………………...………10 - 2000
…………………...………10 - 2000
Число автоматически переключаемых скоростей………………………9
Скорость быстрых перемещений суппорта, мм/мин:
Продольного………………………………………………..………….6000
Поперечного………………………………………………….………..5000
Пределы
рабочих подач, мм/об:
Продольного хода ………………………….……………………..0,01-2,8
Поперечного хода……………………………………….....……0,005-1,4
Дискретность
перемещений, мм:
Продольного………………………………………………………....…0.01
Поперечного………………………………………………………….0.005
Габаритный
размеры станка (без электрощкафа привода подач) 3200х1700х1700 мм.
Т. к. общая длина обрабатываемой детали:

а наибольший диаметр детали:  то
мы видим, что наша деталь удовлетворяет техническим требованиям станка.
то
мы видим, что наша деталь удовлетворяет техническим требованиям станка.
Кинематическая
цепь данного станка представлена на рисунке 2.1
Рисунок 2.1- Кинематическая схема станка
Основные
механизмы и движения в станке такие же как и в станке 16К20Ф3. Приводы подач в
продольном и поперечном направлении осуществляются соответственно от двигателей
постоянного тока М2 и М3 через одноступенчатые передачи и винт-гайки качения.
3. Предварительный выбор электродвигателя
3.1 Определение составляющих времени нагрузочной диаграммы
При определении составляющих времени нагрузочной диаграммы
были использованы источники [4,5].:
[3], [4], [5].
Расчет следует начинать с выбора марки инструментального
материала, геометрической формы режущей части инструмента, назначения глубины
резания и величины подачи, что производится по технологическим картам для
различных видов обработки.
Наиболее распространенными материалами для режущих инструментов
являются быстрорежущая сталь и твердосплавные материалы с геометрией резца  Выберем
резец из твердосплавного материала с геометрией резца
Выберем
резец из твердосплавного материала с геометрией резца 
Скорость резания находится по формуле.
 =
= (3. 1)
(3. 1)
где  -
коэффициент, зависящий от обрабатываемого
материала,
-
коэффициент, зависящий от обрабатываемого
материала,
 от
стойкости и марки твердого сплава,
от
стойкости и марки твердого сплава, от вида
обработки.
от вида
обработки.
Выбираем рекомендуемые подачи на оборот шпинделя. По технологическим
картам для токарной обработки:
для черновой обработки, при t =5 мм, выбираем s = 0,5мм/об.
для чистовой обработки, при t =0,5 мм, выбираем s =0,3 мм/об.
T - стойкость резца, т.е. промежуток времени, в течение которого
инструмент может резать. Измеряется в минутах.
Не рекомендуется выбирать подачи менее 0.1 мм во избежание
возгорания стружки.
Стойкость резца определяем по формуле.
=Tμ·λ, (3.2)
где Tμ - стойкость резца в минутах
машинного времени станка (находим по картам T-3);
λ - коэффициент времени резания.
Tμ находим по картам T-3.
Стойкость резца в минутах машинного времени станка зависит от группы наладки и
от числа инструментов в наладке.
Т.к. диаметры обтачиваемых поверхностей отличаются не более
чем в два раза, а количество фасочных и подрезных резцов не более, чем 20% от
общего количества инструментов наладки, то выбираем наладку с равномерной
нагрузкой с одним инструментом. Отсюда, Tμ = 50 мин.
Коэффициент времени резания находим по формуле
 ,
(3.3)
,
(3.3)
где  - число оборотов шпинделя за время резания;
- число оборотов шпинделя за время резания;
 -
число оборотов шпинделя за время рабочего хода;
-
число оборотов шпинделя за время рабочего хода;
 , (3.4)
, (3.4)
где  - длина резания;
- длина резания;
s -
подача;
 ,
(3.5)
,
(3.5)
где  - длина рабочего хода.
- длина рабочего хода.
Отсюда мы видим, что формулу для коэффициента  можно упростить:
можно упростить:
 ,
(3.6)
,
(3.6)
где  ;
;
где  - подвод, врезание и перебег инструмента;
- подвод, врезание и перебег инструмента;
 -
дополнительная длина, учитывающая сложность детали. Для нашего случая = 0.
-
дополнительная длина, учитывающая сложность детали. Для нашего случая = 0.
 ;
;
Зная геометрию инструмента и глубину резания, находим по картам
Т5 [5]:
для чернового точения =
6;
для чистового точения =
3;
Тогда:
для чернового точения 
для чистового точения 
Если ≥ 0.7, то ей можно пренебречь:

Зная глубину резания, подачу и стойкость инструмента, находим скорость
резания по формуле (3. 1):
для чернового точения  ,
,
для чистового точения  .
.
Т.к. линейная скорость при точении равна скорости резания, то
 , (3.7)
, (3.7)
где d - диаметр поверхности до обработки в мм.
 ;
;
 -
частота вращения шпинделя об/мин;
-
частота вращения шпинделя об/мин;
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Отсюда можно найти частоты вращения шпинделя из формулы (3.7):
 ,
,
для чернового точения:
 [об/мин],
[об/мин],
 [об/мин],
[об/мин],
 [об/мин],
[об/мин],
для чистового точения:
 [об/мин],
[об/мин],
 [об/мин],
[об/мин],
 [об/мин].
[об/мин].
Машинное время определяем по формуле:
 ;
;
где 
для чернового точения:
 [мм],
[мм],
 [мм],
[мм],
 [мм].
[мм].
Отсюда:
 [мин],
[мин],
 [мин],
[мин],
 [мин].
[мин].
для чистового точения:
 [мм],
[мм],
 [мм],
[мм],
 [мм].
[мм].
Отсюда:
 [мин],
[мин],
 [мин],
[мин],
 [мин].
[мин].
.2
Определение сил и моментов, действующих в системе электропривода. Приведение их
к валу двигателя
При расчете сил и моментов, действующих в системе
электропривода, использованы источники [5].
Усилие резца рассчитаем по формуле (3.8)
 (3.8)
(3.8)
где  -
сила резания определенная по таблице[1, карта Т-5];
-
сила резания определенная по таблице[1, карта Т-5];
-
коэффициент, зависящий от обрабатываемого материала;
 -
коэффициент, зависящий от скорости и переднего угла точения.
-
коэффициент, зависящий от скорости и переднего угла точения.
Зная исходные данные определяем, что
для чернового точения  кг =
4998 Н
кг =
4998 Н
для чистового точения  кг =
333,2 Н
кг =
333,2 Н
Зная усилие и скорость резания, находим мощность резания:
 , (3.9)
, (3.9)
для чернового точения  [кВт],
[кВт],
для чистового точения  [кВт].
[кВт].
Перейдем от частоты вращения шпинделя к угловой скорости:
 ,
(3.10)
,
(3.10)
для чернового точения
 [рад/с],
[рад/с],
 [рад/с],
[рад/с],
 [рад/с],
[рад/с],
для чистового точения
 [рад/с],
[рад/с],
 [рад/с],
[рад/с],
 [рад/с].
[рад/с].
Т.к. мощность резания не изменяется, то зная мощность и скорость
резания, находим момент:
 ; (3.11)
; (3.11)
для чернового точения:
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
для чистового точения:
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
 [Н*м].
[Н*м].
Для определения мощности на валу двигателя при черновом и чистовом
точении, разделим мощность резания на КПД кинематической цепи, равный
 (
из условия задания).
(
из условия задания).
Для чернового точения
 [кВт],
[кВт],
Для чистового точения
 [кВт].
[кВт].
Мощность холостого хода на шпинделе станка находим по формуле
 ,
(3.12)
,
(3.12)
где  - коэффициент постоянных потерь, равный = 0.07,
- коэффициент постоянных потерь, равный = 0.07,
 -
максимальная мощность резания;
-
максимальная мощность резания;
 [Вт].
Зная мощность холостого хода, определим момент холостого хода:
[Вт].
Зная мощность холостого хода, определим момент холостого хода:
 ,
,
где  - номинальная частота вращения шпинделя (выбираем
максимальную);
- номинальная частота вращения шпинделя (выбираем
максимальную);
 [Н*м]
[Н*м]
Также необходимо знать кроме основного времени вспомогательное [3].
Время на установку и снятие детали…………………………….0.1 мин
Время перехода с одной ступени на другую………………...……0.1 мин
Время подвода инструмента к детали……………………………0.2 мин
3.3 Построение приближенной нагрузочной диаграммы и её анализ
Построим нагрузочную диаграмму исходя из времени и моментов резания,
рассчитанных выше.
Нагрузочная диаграмма

Рисунок 3.1- Упрощённая нагрузочная диаграмма
После построения нагрузочной диаграммы можем произвести предварительный
выбор двигателя.
По нагрузочной диаграмме механизма находим средний или среднеквадратичный
статический момент, который нужен для нахождения номинального момента искомого
двигателя.
Из построенной диаграммы видно, что время цикла  7,485мин.,
выбираем двигатель с повторно-кратковременным
режимом работы (s3). Повторно-кратковременный режим работы S3 -
последовательность идентичных циклов работы, каждый из которых включает время
работы при неизменной нагрузке, за которое машина не нагревается до
установившейся температуры, и время стоянки, за которое машина не охлаждается
до температуры окружающей среды.
7,485мин.,
выбираем двигатель с повторно-кратковременным
режимом работы (s3). Повторно-кратковременный режим работы S3 -
последовательность идентичных циклов работы, каждый из которых включает время
работы при неизменной нагрузке, за которое машина не нагревается до
установившейся температуры, и время стоянки, за которое машина не охлаждается
до температуры окружающей среды.
В этом режиме цикл работы таков, что пусковой ток не оказывает
заметного влияния на превышение температуры. Продолжительность цикла
недостаточна для достижения теплового равновесия и не превышает 10 мин.
4. Выбор и
проверка двигателя
.1
Предварительный выбор двигателя
При выборе двигателя были использованы источники [8].
Из построенной диаграммы механизма находим средний
статический момент, который нужен для нахождения момента искомого двигателя:
 ,
(4.1)
,
(4.1)
где  - i-ый статический момент резания на i-м интервале диаграммы;
- i-ый статический момент резания на i-м интервале диаграммы;  -
продолжительность i-го интервала; -
число интервалов.
-
продолжительность i-го интервала; -
число интервалов.
Зная все моменты и их длительность, находим средний статический момент
по формуле (4.1):


Номинальный момент искомого двигателя определяется по формуле:
 ,
,
где  - коэффициент, учитывающий динамические режимы работы
электропривода (обычно принимают =1.1…1.3).
- коэффициент, учитывающий динамические режимы работы
электропривода (обычно принимают =1.1…1.3).

В качестве расчетной номинальности скорости выбираем
 ,
т.к. регулирование будет осуществляться вниз от этой скорости.
,
т.к. регулирование будет осуществляться вниз от этой скорости.
Статический момент на валу двигателя:
 ;
;
Отсюда находим номинальную мощность двигателя:
 ,
(4.2)
,
(4.2)

По вычисленной мощности предварительно выбираем электродвигатель по
каталогу или справочнику [8].
При выборе двигателя руководствуемся следующим:
Двигатель должен поддерживать Периодический повторно-кратковременный
режим работы (s3).Его
мощность должна превышать  =6[кВт]; выбираем
двигатель постоянного тока 4ПФ132S.
=6[кВт]; выбираем
двигатель постоянного тока 4ПФ132S.
|
Параметры
|
Значение
|
|
Мощность, кВт
|
7,5
|
|
Напряжение якоря, В
|
220
|
|
Ток якоря, А
|
43,6
|
|
КПД, %
|
76
|
|
Номинальная частота
вращения, об/мин
|
1000
|
|
Максимальная
частота вращения, об/мин
|
4500
|
4.2 Расчет
динамических параметров привода
При расчете динамических параметров привода, были
использованы
источники [4,6,7].
После того как двигатель предварительно выбран, можно перейти
к построению нагрузочной диаграммы электропривода, т.е. зависимости электромагнитного момента M от t. Это построение сводится к решению
уравнения движения
 , (4.3)
, (4.3)
где  - суммарный момент инерции электропривода,
- суммарный момент инерции электропривода,  , определяемый как
, определяемый как
 , (4.4)
, (4.4)
где  - коэффициент, учитывающий момент инерции движущихся
частей передаточного механизма (
= 1.1…1.3);
- коэффициент, учитывающий момент инерции движущихся
частей передаточного механизма (
= 1.1…1.3);  -
момент инерции двигателя(смотри характеристики двигателя);
-
момент инерции двигателя(смотри характеристики двигателя);  -
момент инерции вращающихся частей механизма (смотри задание к проекту);
-
момент инерции вращающихся частей механизма (смотри задание к проекту);
 =1,8-
передаточное число механизма (смотри задание);
=1,8-
передаточное число механизма (смотри задание);  -
масса поступательно движущихся частей механизма;
-
масса поступательно движущихся частей механизма;  -
линейная скорость поступательно движущихся масс;
-
линейная скорость поступательно движущихся масс;  -
угловая скорость двигателя.
-
угловая скорость двигателя.
Т.к. для привода главного движения, поступательно движущиеся части
механизма отсутствуют, то  = 0 .
= 0 .
Отсюда, находим суммарный момент инерции электропривода по формуле
(4.4)
Для чернового точения
 ,
,
Для чистового точения
 .
.
Из характеристик к двигателю определяем пусковой момент.
Найдем номинальную угловую скорость
 ,
,
 [рад/с].
[рад/с].
Зная номинальную мощность и номинальную угловую скорость, найдем
номинальный момент
,
 .
.
Т.к.  = 3(из характеристики двигателя), то отсюда мы можем
найти пусковой момент:
= 3(из характеристики двигателя), то отсюда мы можем
найти пусковой момент:

Далее, определим момент холостого хода по уже известной формуле
 ,
,
 ;
;
Для того, чтобы найти расчетные угловые скорости двигателя,
нужно угловые скорости шпинделя умножить на передаточное число редуктора

Для чернового точения:
 [рад/с],
[рад/с],
 [рад/с],
[рад/с],
 [рад/с],
[рад/с],
Для чистового точения:
 [рад/с],
[рад/с],
 [рад/с],
[рад/с],
 [рад/с].
[рад/с].
Определяем время пуска и торможения.
Для чернового точения:
 ,
,
 [с],
[с],
 ,
,
 [с],
[с],
 ,
,
 [с],
[с],
Для чистового точения:
 ,
,
 [с],
[с],
 ,
,
 [с],
[с],
 ,
,
 [с],
[с],
 ,
,
 [с].
[с].
Далее, определим моменты, приведенные к валу двигателя:
Момент пуска механизма равен
 [Н*м].
[Н*м].
Момент торможения механизма равен
 [Н*м].
[Н*м].
Статические моменты, приведенные к валу двигателя равны
 .
.
Для чернового точения:
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
 [Н*м].
[Н*м].
Для чистового точения:
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
 [Н*м].
[Н*м].
Динамический момент электропривода предварительно определяют
приближенно
 ,
(4.5)
,
(4.5)
где  - установившаяся угловая скорость двигателя на данном
интервале скоростной диаграммы, рад/с;
- установившаяся угловая скорость двигателя на данном
интервале скоростной диаграммы, рад/с;
 -
время пуска (торможения), с;
-
время пуска (торможения), с;
 -
допустимое угловое ускорение электропривода, рад/с2;
-
допустимое угловое ускорение электропривода, рад/с2;
Допустимое угловое ускорение электропривода связано с допустимым линейным ускорением механизма  (
находится по литературным источникам, для нашего станка
(
находится по литературным источникам, для нашего станка  = 1÷1.5):
= 1÷1.5):
 , (4.6)
, (4.6)
где  - радиус приведения, определяемый как
- радиус приведения, определяемый как
 (4.7)
(4.7)
Для чернового точения:
 [м],
[м],
 [м],
[м],
Для чистового точения:
 [м],
[м],
 [м],
[м],
 [м].
[м].
Отсюда, находим допустимое угловое ускорение электропривода по формуле
(4.6):
Для чернового точения:
 [рад/c2],
[рад/c2],
 [рад/c2],
[рад/c2],
 [рад/c2].
[рад/c2].
Для чистового точения:
 [рад/c2],
[рад/c2],
 [рад/c2],
[рад/c2],
 [рад/c2].
[рад/c2].
Зная допустимое угловое ускорение электропривода, находим динамический
момент:
электропривод двигатель торможение сила
 ;
;
Для чернового точения:
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
 [Н*м].
[Н*м].
Для чистового точения:
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
 [Н*м].
[Н*м].
Динамические моменты, приведенные к валу двигателя равны

Для чернового точения:
 [Н*м],
[Н*м],
 11,68[Н*м],
11,68[Н*м],
 [Н*м].
[Н*м].
Для чистового точения:
 [Н*м],
[Н*м],
 [Н*м],
[Н*м],
 [Н*м].
[Н*м].
В каждом месте уточненной нагрузочной диаграммы момент будет
определяться уравнением движения:

4.3 Построение уточненной нагрузочной диаграммы
Уточненная нагрузочная диаграмма электропривода используется для
предварительной проверки электропривода по нагреву и перегрузочной способности.
Рисунок 4.1 - Скоростная диаграмма
Рисунок 4.2 - Уточненная нагрузочная диаграмма
Рисунок 4.3 - Зависимость динамического момента от времени

Рисунок 4.4 - Зависимость общего момента от времени
Из диаграммы для общего момента видно, что отрицательный динамический
момент не превышает по своей величине статический, а значит, вал не тормозится.
Это обеспечит точность обработки детали.
.4 Проверка электродвигателя
При проверке двигателя были использованы следующие источники: [4-7].
Для проверки двигателя по нагреву используется несколько методов: метод
средних потерь и метод эквивалентных величин (тока, момента, мощности).
Наиболее универсальным являются метод средних потерь, который формулируется
таким образом: если средняя за цикл мощность не превышает номинальную мощность
потерь, то есть если:  , то средняя температура перегрева не превышает
допустимую, то есть
, то средняя температура перегрева не превышает
допустимую, то есть  ;
;
Найдем мощности на каждом из интервалов нагрузочной диаграммы

где  -
момент и скорость двигателя на i-м интервале;
-
момент и скорость двигателя на i-м интервале;
Для чернового точения:
 [Вт],
[Вт],
 [Вт],
[Вт],
 [Вт].
[Вт].
Для чистового точения:
 [Вт],
[Вт],
 [Вт],
[Вт],
 [Вт].
[Вт].
 -
КПД двигателя при частичной загрузке
-
КПД двигателя при частичной загрузке 
 ,
,
где - коэффициент загрузки;
-
коэффициент постоянных потерь (=0.07).
 ;
;
 ,
,
 ,
,
 ,
,
 ,
,
 .
.

Найдем потери мощности
 [Вт],
[Вт],
 [Вт],
[Вт],
 [Вт],
[Вт],
 422,27[Вт],
422,27[Вт],
 Вт],
Вт],
 [Вт].
[Вт].
Теперь найдем средние потери

 [Вт]
[Вт]
Найдем потери при номинальной мощности
 ,
,
 [Вт]
[Вт]
Т.к.  ,
то мы видим, что двигатель удовлетворяет требованиям по перегреву.
,
то мы видим, что двигатель удовлетворяет требованиям по перегреву.
Также двигатель проверяют по перегрузочной способности:
 ,
,
где  =5 -
допустимый коэффициент перегрузки двигателя по моменту (указывается в источнике
[8]);
=5 -
допустимый коэффициент перегрузки двигателя по моменту (указывается в источнике
[8]);
 =343,6313[H*м];
=343,6313[H*м];
 [H*м].
[H*м].
Т.к. 
 ,
то условие по перегрузке также выполняется.
,
то условие по перегрузке также выполняется.
5. Расчет механических характеристик и переходных процессов при пуске и
торможении
.1 Расчет
механических характеристик
При расчете механических характеристик электропривода были
использованы е источники [1,7].
Статические механические характеристики дают основные представления
об электромеханических свойствах электропривода при изменениях нагрузки в
статических режимах работы. Построенные естественная и искусственные
статические механические характеристики позволяют дать ответ о точности
регулирования, которое оценивается значением модуля статической жесткости
механической характеристики, а также может быть оценено ее статизмом. Чем
большее значение имеет модуль жесткости, тем точнее поддерживается скорость
электропривода при изменениях нагрузки и регулирования скорости.Для построения
механической характеристики двигателя независимого возбуждения достаточно знать
2 точки, поскольку механически характеристики представляют собой прямые линии
 где
где
 -
угловая скорость идеального холостого хода электродвигателя,
-
угловая скорость идеального холостого хода электродвигателя,  ;
;
 -
модуль жесткости механической характеристики,
-
модуль жесткости механической характеристики, 
 -
текущие значения угловой скорости и электромагнитного момента.
-
текущие значения угловой скорости и электромагнитного момента.
Для начала найдем постоянную двигателя
 (5.1)
(5.1)
где
 -
номинальное напряжение двигателя;
-
номинальное напряжение двигателя;
 -
номинальный ток якоря;
-
номинальный ток якоря;
 -сопротивление
якоря двигателя;
-сопротивление
якоря двигателя;
 ;
; = (2 ÷
2,7)В - падение напряжения на
щетках;
= (2 ÷
2,7)В - падение напряжения на
щетках;
 -
номинальная угловая скорость двигателя.
-
номинальная угловая скорость двигателя.
Необходимо
рассчитать сопротивление якоря:

где  ,
,
Rном -
номинальное сопротивление якоря,
hном -
номинальный к.п.д. двигателя.

Найдем постоянную двигателя по формуле (5.1)

Теперь можно посчитать угловую скорость идеального холостого хода

Найдем модуль жесткости механической характеристики

Естественная механическая характеристика (рисунок 5.1) строится по 2-м
точкам
а)  ,б)
,б)

 .
.
Рисунок 5.1 - Механическая характеристика ДПТ
Из графика видно, что выбранный электродвигатель удовлетворяет
требованиям к электроприводу [7,8] :
1) диапазон регулирования скорости(для привода главного движения обычно
D≤100);
) плавность регулирования.
.2 Расчет переходных процессов при пуске и торможении
При расчете переходных процессов при пуске и торможении были
использованы источники [1,7,9].
Характер переходного процесса зависит от характера управляющего
воздействия, а также от инерционности электропривода (электромеханической  и электромагнитной
и электромагнитной  постоянных
времени) и их количественного соотношения. Если ≤ 4∙,
то следует учитывать обе постоянные времени и рассчитывать электромеханический
переходной процесс. Если > 4,
то можно рассматривать только механический переходной процесс, обусловленный
механической инерцией. При плавном изменении управляющего воздействия можно
принять = 0 и рассчитывать только механический переходной
процесс.
постоянных
времени) и их количественного соотношения. Если ≤ 4∙,
то следует учитывать обе постоянные времени и рассчитывать электромеханический
переходной процесс. Если > 4,
то можно рассматривать только механический переходной процесс, обусловленный
механической инерцией. При плавном изменении управляющего воздействия можно
принять = 0 и рассчитывать только механический переходной
процесс.
При абсолютно жестких механических передачах движение привода
описывается дифференциальным уравнением:
 (5.3)
(5.3)
Решение данного уравнения упрощается, если  представляет собой линейную функцию скорости. Поэтому
в дальнейшем будем считать, что момент сопротивления от скорости не зависит, а
механическая характеристика привода линейна (имеется ввиду рабочий участок
механической характеристики).
представляет собой линейную функцию скорости. Поэтому
в дальнейшем будем считать, что момент сопротивления от скорости не зависит, а
механическая характеристика привода линейна (имеется ввиду рабочий участок
механической характеристики).
Для приводов, имеющих линейную механическую характеристику, момент
имеет вид:

Подставим это выражение в уравнение движение привода и получим:
 (5.4)
(5.4)
где  - электромеханическая постоянная времени.
- электромеханическая постоянная времени.
Полученное выражение представляет собой линейное неоднородное
дифференциальное уравнение первого порядка. Структурная схема полученной
электромеханической системы приведена ниже на рисунке 5.3.
Рисунок 5.3 - Структурная схема привода
Привод представлен инерционным звеном первого порядка с двумя внешними
воздействиями: управляющим воздействием или заданием скорости  и возмущением по моменту
и возмущением по моменту  . Характерно, что полученное уравнение и структурная
схема содержат только механические параметры и механические параметры на этом
основании представляют собой механическую модель электромеханического привода.
Электрические параметры в такой модели явно не присутствуют. Однако, стоит
заметить, что электрическая постоянная времени ничтожно мала по сравнению с
механической, а значит не оказывает особого влияния на интересующее нас
быстродействие системы.
. Характерно, что полученное уравнение и структурная
схема содержат только механические параметры и механические параметры на этом
основании представляют собой механическую модель электромеханического привода.
Электрические параметры в такой модели явно не присутствуют. Однако, стоит
заметить, что электрическая постоянная времени ничтожно мала по сравнению с
механической, а значит не оказывает особого влияния на интересующее нас
быстродействие системы.
Найдем электромеханическую постоянную времени:
,
где
 -
модуль жесткости механической характеристики.
-
модуль жесткости механической характеристики.
Для чернового точения:

Для чистового точения:

Т.к. электромеханические постоянные времени совпадают до 3 знака, то
время переходного процесса при черновом и чистовом точении считаем одинаковыми.
Для определения времени пуска и торможения воспользуемся пакетом Matlab.
Пусть двигатель разгоняется до номинальной частоты ( 144,7
рад/с) при номинальном моменте (
144,7
рад/с) при номинальном моменте ( 71,6332Н*м).
71,6332Н*м).
Переходной процесс при пуске представлены на рисунке 5.4.
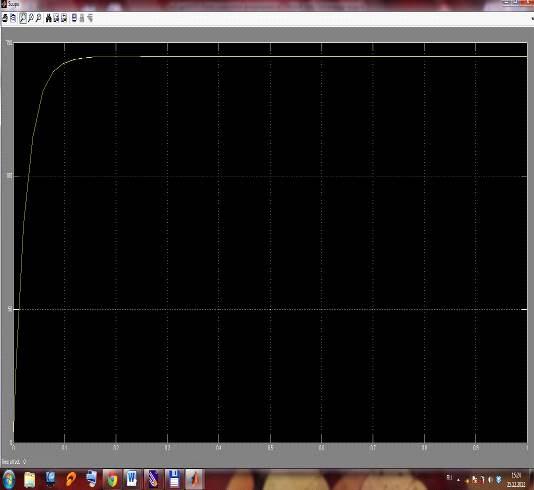
Рисунок 5.4 - Переходной процесс при пуске
Переходной процесс при торможении представлены на рисунке 5.5.
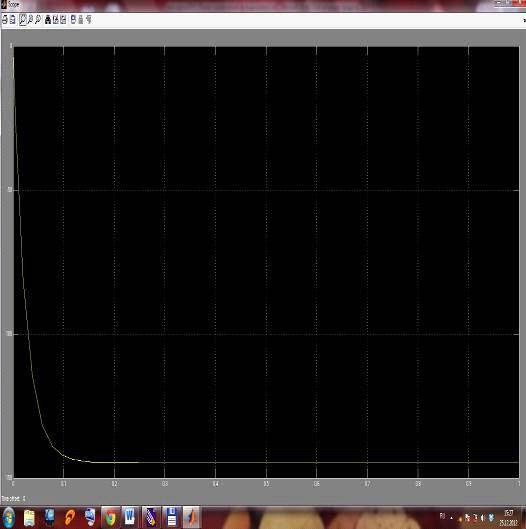
Рисунок 5.5 - Переходной процесс при торможении
Из графиков видно, что время переходного процесса  .
Так как оно меньше времени подвода инструмента
.
Так как оно меньше времени подвода инструмента  ,
то делаем вывод: выбранный двигатель обеспечивает необходимые режимы резания
(частоты вращения).
,
то делаем вывод: выбранный двигатель обеспечивает необходимые режимы резания
(частоты вращения).
6. Применение комплектного электропривода
.1 Обзор и
анализ современных электроприводов
Электрический
привод - это электромеханическая система для приведения в движение
исполнительных механизмов рабочих машин и управления этим движением в целях
осуществления технологического процесса. Современный электропривод - это
совокупность множества электромашин, аппаратов и систем управления ими. Он
является основным потребителем электрической энергии (до 60 %) и главным
источником механической энергии в промышленности. Функциональная схема привода
представлена на рисунке 6.1[12].
Рисунок 6.1 - Функциональная схема привода
Функциональные элементы:
§ регулятор (Р) предназначен для
управления процессами, протекающими в электроприводе;
§ электрический преобразователь (ЭП)
предназначен для преобразования электрической энергии сети в регулируемое
напряжение постоянного или переменного тока;
§ электромеханический преобразователь
(ЭМП) - двигатель, предназначен для преобразования электрической энергии в
механическую;
§ механический преобразователь (МП) может
изменять скорость вращения двигателя, а также характер движения (с
поступательного на вращательное
<#"659606.files/image281.jpg">
Рисунок 6.1- Функциональная схема
электропривода ЭПУ1М-1-4320
На рисунке 6.2 представлена
структурная схема электропривода ЭПУ1М-1-4320М:
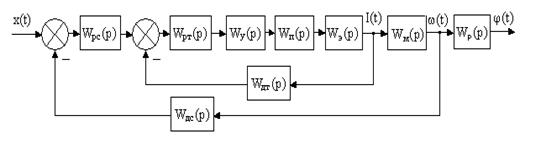
Рисунок 6.2 - Структурная схема электропривода ЭПУ1М-1-4320М
 -
передаточная функция преобразователя;
-
передаточная функция преобразователя;
 -
передаточная функция электрической части ДПТ;
-
передаточная функция электрической части ДПТ;
 -
передаточная функция механической части ДПТ;
-
передаточная функция механической части ДПТ;
 -
передаточная функция редуктора;
-
передаточная функция редуктора;
 -
передаточная функция усилителя;
-
передаточная функция усилителя;
 -
передаточная функция регулятора скорости;
-
передаточная функция регулятора скорости;
 -
передаточная функция регулятора тока;
-
передаточная функция регулятора тока;
 -
передаточная функция датчика тока;
-
передаточная функция датчика тока;
 -
передаточная функция датчика скорости;
-
передаточная функция датчика скорости;
6.4 Описание
и работа электропривода
Силовая часть блока управления
включает тиристорный преобразователь якоря ТПЯ, выполненный на трехфазной
мостовой нереверсивной схеме и тиристорный преобразователь возбуждения ТПВ,
включенный по однофазной мостовой нереверсивной схеме.
Система регулирования электроприводом выполнена одноконтурной с
ПИ-регулятором скорости РС и обратной связью по току (iя) на вход управляющего органа УО.
Управление тиристорами ТПЯ(Рисунок 6.1) производится от трехканальной
СИФУ, содержащей формирователи импульсов ФИ1-ФИ3. Ввод управляющего сигнала в
ФИ1-ФИ3, а также его смещение (aнач) и ограничение (amin, amax) осуществляется с помощью переменных
резисторов R26, R40, R39
соответственно управляющим органом УО. Сигнал заданного направления тока на
вход УО поступает с выхода нелинейного звена НЗ. Звенья НЗ и ФПЕ с резистором R47 образуют устройство линеаризации
характеристик ЭП в режиме прерывистого тока (РПТ). При этом коэффициент
передачи НЗ обратно пропорционален коэффициенту передачи ТПЯ, а коэффициент
передачи ФПЕ компенсирует внутреннюю отрицательную связь по ЭДС двигателя. С
помощью устройства линеаризации осуществляется поддержание примерно одинакового
коэффициента усиления линеаризованного таким образом преобразователя.
Задающий сигнал Uзад с задатчика скорости R1 поступает на вход регулятора
скорости PC через задатчик интенсивности
ЗИ разгона электропривода, который может регулировать длительность разгона электропривода
с помощью сменного резистора R5 до 10 с.
На входе регулятора PC суммируются сигналы задания скорости
с ЗИ через R7 и обратной связи с
тахогенератора через резисторы R9, R10, R11. Вместо задатчика R1 вход ЗИ может подключаться к
аналоговому выходу системы с ЧПУ.
Установка нулевой скорости
обеспечивается подачей положительного напряжения смещения на вход операционного
усилителя А2.1(на котором выполнен ПИ-регулятор скорости) в результате
усилитель смещен в нерабочую зону. Элементы коррекции PC R15, С7 установлены нa лепестках, что позволяет осуществить
их подбор при наладке. Резистор R13 обеспечивает плавную регулировку коррекции.
В целом система регулирования данного
электропривода выполнена однозонной (Ф-const). Однако, в целях унификации с двухзонным
приводом источник питания обмотки возбуждения выполнен регулируемым на
тиристорном и диодном модулям. Это позволяет иметь регулирование и стабилизацию
тока возбуждения двигателя без существенных затрат на систему управления. Такое
решение, кроме стабилизации тока возбуждений, позволяет при необходимости
(например, для быстрых перемещений механизма) осуществить регулирование
скорости двигателя с ослаблением поля по входу «Регулирование Ф».
Задающий сигнал Iв.зад. на РТВ подается через резистор
R39 с переменного резистора R37. Сигнал обратной связи по току
поступает с датчика тока ДТВ через резистор R40.
Управляющий сигнал с РТВ поступает на
формирователь импульсов возбудителя ФИВ, где происходит его сравнение с
пилообразным напряжением, поступающим с одного из каналов СИФУ якоря.
Резисторами R27 и R28 выставляются углы αmax=160 эл. град. и αmin=50 эл. град.
Блок защит осуществляет блокирование
сигнала на выходе PC.
Для улучшения динамических характеристик ЭП на вход УО введена
отрицательная связь по току, уровень которой можно менять резистором R69.
Кнопка S1 осуществляет установку триггеров
защиты БЗ (блок защиты) в начальное состояние (сброс защит).
Система импульсно-фазового управления (СИФУ)
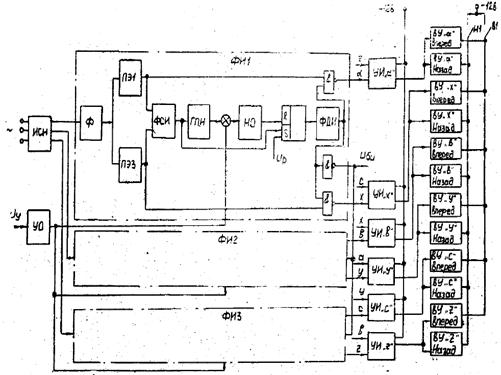
Рисунок 6.3- Система импульсно-фазового управления (СИФУ)
СИФУ предназначена для преобразования постоянного управляющего напряжения
в последовательность управляющих импульсов соответствующей фазы, подаваемых на
управляющие переходы тиристоров силовых вентильных комплектов.
СИФУ состоит из следующих основных узлов:
- источника синхронизирующего напряжения - ИСН;
- формирователей импульсов - ФИ1…ФИ3;
управляющего органа - УО;
усилителей импульсов - УИ;
вводных устройств - ВУ (импульсных трансформаторов).
Формирователь импульсов (ФИ) состоит, в свою очередь, из следующих узлов:
- фильтра (Ф), двух пороговых элементов (ПЭ1, ПЭ2) ;
- формирователя синхронизирующих импульсов (ФСИ);
генератора пилообразного напряжения (ГПН);
нуль органа (НО);
- RS-триггера (Т);
Формирователя длительности импульсов (ФДИ).
Схема работает следующим образом
Синхронизирующее фазное напряжение, поступающее из ИСН (источник
синхронизирующего напряжения) сдвигается фильтром Ф на угол 30 эл. градусов. С
выхода фильтра напряжение с помощью пороговых элементов ПЭ1, ПЭ2 преобразуется
в прямоугольные противофазные импульсы. Длительность импульсов определяет зону
разрешения выдачи управляющих импульсов для двух тиристоров силового моста
(анодной и катодной группы) одной и той же фазы сети.
При логическом сигнале “0” на выходах обоих пороговых элементов на выходе
ФСИ формируется синхроимпульс (логический сигнал “1”), который осуществляет
разряд емкости С2 ГПН через открывшийся транзистор V6. Напряжение ГПН начинает снова линейно нарастать от нуля до
8 В. Момент превышения напряжения ГПН над управляющим Uу, поступающим с выхода УО через резистор R14, фиксируется нуль-орган НО,
который изменяет свое состояние с “1” на “0”, и происходит переключение RS-триггера, вызывая появление на
выходе ФДИ импульса, который совместно с сигналами пороговых элементов ПЭ1 и
ПЭ2 формирует управляющие импульсы на выходах усилителей импульсов УИ “а” или
УИ “х”. Усилители импульсов собраны на транзисторах V9…V14, нагрузкой
которых являются излучающие диоды оптронных тиристоров или вводные устройства
ВУ при использовании обычных тиристоров (без оптронного входа).
Вводное устройство ВУ служит для гальванического разделения силовой цепи
и цепи управления и состоит из 12 импульсных трансформаторов, защитных диодов и
резисторов.
Управляющий орган (УО) служит для
согласования выхода канала регулирования с входами СИФУ, а также для установки
углов aмин, aмак, aнач. Начальный угол
регулирования устанавливается переменным резистором R26 при нулевых сигналах на входе УО.
Минимальный угол устанавливается резистором R40, максимальный - резистором R39 [14].
7.
Расчет расхода энергии и КПД за цикл работы
В ходе расчета КПД и потерь энергии был использован следующий
источник: [6].
При работе электрической машины часть потребляемой энергии
теряется бесполезно. Для определения расхода энергии за цикл работы, необходимо
определит расход энергии за время пуска, за время установившегося движения и за
время торможения.
Потери мощности при пуске определяются по следующей формуле:
 (7.1)
(7.1)
где  -
пусковой момент;
-
пусковой момент;
 -
номинальная скорость ротора двигателя ;
-
номинальная скорость ротора двигателя ;
 -
номинальный КПД .
-
номинальный КПД .

Отсюда, мы можем определить работу за пуск двигателя
 (7.2)
(7.2)
В результате получим

Потери мощности при установившемся режиме определяются по следующей
формуле:
 (7.3)
(7.3)
где -  статические
моменты, для чернового и чистового точения при установившемся движении (смотри
п.4.2);
статические
моменты, для чернового и чистового точения при установившемся движении (смотри
п.4.2);
 -
КПД за отдельные период резания (смотри п.4.4);
-
КПД за отдельные период резания (смотри п.4.4);
 -
угловая скорость за отдельный период резания (смотри п.4.2).
-
угловая скорость за отдельный период резания (смотри п.4.2).

 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Зная потери за каждый интервал, находим работу
 (7.4)
(7.4)
где -  время
установившегося режима резания (смотри п.3.1).
время
установившегося режима резания (смотри п.3.1).
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Потери мощности при торможении определяются по следующей формуле:
 (7.5)
(7.5)
где -  динамический
момент, тормозящий двигатель (смотри п.4.2).
динамический
момент, тормозящий двигатель (смотри п.4.2).
 .
.
Отсюда, мы можем определить работу

Подставим эти значения
 .
.
Общая работа находится по формуле
 ;
;

Для определения работы на нагрев, умножим мощности потерь на время их
действия

 ;
;

КПД находим по следующей формуле:

Величина КПД за цикл электропривода больше
меньше чем у двигателя.
Заключение
В курсовом проекте был рассмотрен технологический процесс, для
технологического процесса был рассчитан и выбран двигатель. Для двигателя
произведен выбор электропривода.
Для двигателя была произведена проверка, после которой можно сделать
вывод, что данный двигатель подходит под технологический процесс.
Список используемых источников
1.Михайлов
В. П. «Автоматизированный электропривод станков и роботов: Учебник для вузов».
М.: Машиностроение, 1990г
2.Методическое
пособие по дисциплине «Технология и оборудование в приборостроении и
радиоэлектронной промышленности» доц. Новичихин Р.В.
.СЕ.
Локтев «Станки с программным управлением и промышленные роботы» М.:
Энергоиздат, 1981г.
4.
«Общий курс электропривода» М.Г. Чиликин, А.С. Сандлер. М.: Энергоиздат. 1981г.
5.«Режимы
резания металлов» Барановский Ю.В. М.: Машиностроение, 1980.
6.«Методическое
пособие к курсовому проектированию по автоматизированному электроприводу
станков и промышленных роботов для студентов специальностей 21.06 и 21.03 -
«Робототехнические системы» и «Автоматизация технологических процессов
комплексов» Лившиц Ю.Е., Фираго Б.И.
7. «Конспект
лекций по курсу «автоматизированный электропривод» Лившиц Ю.Е.
8.«Справочник
по электротехническим машинам». Копылов Б. К. 1 т- М.:
Энергоиздат,
1983г.
.
Справочник по автоматизированному электроприводу / Под ред. В.А. Елесеева и
А.В. Шинянского. - М.: Энергоатомиздат, 1983. - 616с.ил.
10.Техническое
описание и инструкция по эксплуатации электроприводов унифицированных
трехфазных серии ЭПУ 1, издание 4.
11.World
Wide Web Site: http:\\ELMOTOR.RU\