Демодулятор сигналов КАМ-4
МИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ
ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ЮЖНЫЙ
ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
ТЕХНОЛОГИЧЕСКИЙ
ИНСТИТУТ в г. ТАГАНРОГЕ
(ТТИ ЮФУ)
Кафедра РТС
Курсовой
проект по дисциплине
Основы систем
связи с ПО
на тему
«Демодулятор
сигналов КАМ-4»
Выполнила:
Студентка группы Р-78 Блинова Т. В.
Проверил:
Горбенко А. П.
Таганрог
2012г.
Содержание
Введение
1. Разработка функциональной схемы модулятора.
1.1 Анализ способа передачи
1.2 Представление сигнала цифровой модуляции
.3 Сравнительный анализ различных видов модуляции
.4 Обзор устройств и разработка функциональной схемы
демодулятора
2. Описание модулятора и демодулятора. Особенности
формирования сигнала КАМ-4
2.1 Описание работы модулятора
.2 Демодуляция сигнала КАМ-4
2.3 Обоснования структурной схемы
3. Заключение
Список используемых источников
Введение
При создании систем передачи информации в большинстве случаев
оказывается, что спектр исходного сигнала, подлежащего передаче, сосредоточен
не на тех частотах, которые эффективно пропускает имеющийся канал связи. Кроме
того, очень часто необходимо в одном и том же канале связи передавать несколько
сигналов одновременно. Одним из способов решения этой задачи является
использование частотного разделения каналов, при котором разные сигналы
занимают неперекрывающиеся полосы частот.
Далее, во многих случаях требуется, чтобы передаваемый сигнал был
узкополосным. Это означает, что эффективная ширина спектра намного меньше его
центральной частоты.
Перечисленные причины приводят к необходимости такой трансформации
исходного сигнала, чтобы требования, предъявляемые к занимаемой сигналом полосе
частот, были выполнены, а сам исходный сигнал можно было восстановить.
Решение указанной проблемы достигается при использовании модуляции,
сущность которой заключается в следующем. Формируется некоторое колебание (чаще
всего гармоническое), называемое несущим колебанием или просто несущей, и
какой-либо из параметров этого колебания изменяется во времени пропорционально
исходному сигналу. Исходный сигнал называют модулирующим, а результирующее
колебание с изменяющимися во времени параметрами - модулированным сигналом.
Обратный процесс - выделение модулирующего сигнала из модулированного колебания
- называется демодуляцией.
Выбор используемого вида модуляции был сделан неслучайно.
Четырехпозиционная квадратурная амплитудная модуляция (КАМ-4, 4QAM) обладает высокой спектральной и
энергетической эффективностью, является оптимальной с точки зрения применения в
системах с повышенной устойчивостью к различного рода помехам. В связи с этим
КАМ-4 широко используется для передачи данных через каналы с ограниченной
полосой пропускания, например факс-модемы, высокоскоростные кабели,
многочастотные беспроводные и спутниковые системы, локальные вычислительные
радиосети.
1. Разработка функциональной схемы демодулятора
.1 Анализ способа передачи информации
В
настоящее время наиболее перспективным и высококачественным способом передачи
информации является передача информационных сообщений в цифровой форме. Это
означает, что передаче подлежит не непрерывный (аналоговый) модулирующий
сигнал, а последовательность целых чисел  , которые
могут принимать значения из некоторого фиксированного конечного множества. Эти
числа, называемые символами, поступают от источника информации с периодом
, которые
могут принимать значения из некоторого фиксированного конечного множества. Эти
числа, называемые символами, поступают от источника информации с периодом  , а частота, соответствующая этому периоду, называется
символьной скоростью.
, а частота, соответствующая этому периоду, называется
символьной скоростью.
Повышенный
интерес к передаче информационных сообщений в цифровой форме обусловлен рядом
факторов:
высокая
помехоустойчивость цифровых систем передачи информации, позволяющая достичь
более полного использования пропускной способности канала при высоком качестве
передачи информации;
высокая
универсальность ЦСПИ относительно характера источника и потребителя сообщений,
а также возможность объединения различных потоков сообщений в едином цифровом
стволе линии связи;
относительная
простота сопряжения ЦСПИ различных типов и различных уровней иерархии, что
обуславливает возможность непосредственного включения ЦСПИ в интегрированные
сети региональных, национальных и глобальных цифровых систем связи;
возможность
обнаружения и устранения искажений информационных сообщений в процессе
обработки сигналов в ретрансляторах ЦСПИ, что обеспечивает сохранение высокой
помехоустойчивости при многоступенчатой и разветвленной структуре системы
связи;
возможность
обеспечения конфиденциальности передаваемых сообщений;
уменьшенные
габаритные размеры и увеличенная надежность аппаратуры формирования и приема
цифровых сигналов за счет широкого применения программируемой элементной базы,
такой как: цифровые сигнальные процессоры (DSP - digital signal processing), однокристальные
микроЭВМ, программируемые логические интегральные схемы (ПЛИС).
Типичным
подходом при осуществлении передачи дискретной последовательности символов
является многопозиционная модуляция. При этом каждому из возможных значений
символа сопоставляется некоторый набор параметров несущего колебания:
амплитуда, частота, фаза. Эти параметры поддерживаются постоянными в течение
интервала времени , то есть до прихода следующего символа. В зависимости
от того, какие именно параметры изменяются, различают амплитудную (АМ), фазовую
(ФМ), частотную (ЧМ), квадратурную амплитудную (КАМ), а также некоторые другие
виды модуляции.
Многопозиционная
модуляция предполагает переход от двоичного алфавита символов {0, 1}
дискретного сообщения к М-ичному:
 (1.1)
(1.1)
где N - длина преобразуемых
последовательностей двоичных символов;
 - объем
алфавита.
- объем
алфавита.
К
примеру, при  алфавит включает четыре символа {00, 01, 10, 11}. При
алфавит включает четыре символа {00, 01, 10, 11}. При
 (двоичная модуляция) алфавит состоит всего из двух
бинарных символов - {0, 1}.
(двоичная модуляция) алфавит состоит всего из двух
бинарных символов - {0, 1}.
Таким
образом, передача последовательностей сообщений цифровыми системами
осуществляется путем преобразования их в последовательность битов, которые
преобразуются в последовательность канальных символов.
Каждый
двоичный символ (бит) передается в течение времени  , равного его длительности. Скорость передачи
, равного его длительности. Скорость передачи  , выраженная в битах в секунду, определяется
соотношением:
, выраженная в битах в секунду, определяется
соотношением:
 . (1.2)
. (1.2)
Длительность передачи M-ичного символа вычисляется по формуле:
 . (1.3)
. (1.3)
Тогда скорость передачи М-ичных символов (символьная скорость)
рассчитывается по формуле:
 (1.4)
(1.4)
Цифровая модуляции сильно влияет на пропускную способность (скорость
передачи) канала связи. Для многоуровневых сигналов пропускная способность
канала (fb, бит/с) связана с минимальной шириной полосы пропускания канала
Найквиста (В, Гц) и количеством дискретных сигналов или уровней напряжения (М)
зависимостью:
 (1.5)
(1.5)
С учетом выражения (1.1), имеем:
 (1.6)
(1.6)
Таким образом, использование М-кратного кодирования, называемого также
многократной или многопозиционной манипуляцией, при заданной минимальной ширине
полосы частот канала может привести к значительному увеличению максимальной
скорости передачи информации по каналу. Факторами, влияющими на максимальную
скорость передачи при заданной ширине полосы частот канала, являются тип кодирования
и модуляции (волновые формы), типы используемых фильтров, помехи в системе и
требуемые показатели ошибок. Реально достижимые максимальные скорости передачи
оказываются ниже теоретически предсказанных значений.
Необходимо подчеркнуть, что серьезное влияние на качество приема
многопозиционных дискретных сигналов оказывают межсимвольные и нелинейные
искажения сигналов в трактах ЦСПИ.
.2 Представление сигналов цифровой модуляции
модулятор передача сигнал цифровой
Цифровая модуляция - это процесс преобразования цифровых символов в
сигналы, совместимые с характеристиками канала связи. Если в качестве несущей
волны используется высокочастотный синусоидальный сигнал, то цифровую модуляцию
можно определить как процесс варьирования амплитуды, частоты или фазы (или их
комбинаций) радиочастотной несущей согласно символам передаваемого сообщения.
В общем виде модулированный сигнал записывается следующим образом:
 , (1.1.1)
, (1.1.1)
 -
частота несущего гармонического колебания.
-
частота несущего гармонического колебания.
Выражение (1.1.1) можно представить в следующем виде:
 (1.1.2)
(1.1.2)
где
 ,(1.1.3)
,(1.1.3)
 .(1.1.4)
.(1.1.4)
Согласно
выражению (1.1.2) модулированный радиосигнал можно представить в виде суммы
двух гармонических колебаний, модулированных сигналами  и
и  и
отличающихся начальным фазовым сдвигом, равным 90°. В этом выражении
составляющая
и
отличающихся начальным фазовым сдвигом, равным 90°. В этом выражении
составляющая  носит название синфазной, а
носит название синфазной, а  - квадратурной.
- квадратурной.
Из
выражений (1.1.3) и (1.1.4) получим соотношения для  и
и  :
:
 , (1.1.5)
, (1.1.5)
 . (1.1.6)
. (1.1.6)
Учитывая выражения (1.1.5) и (1.1.6), становится возможным графическое
представление сигналов цифровой модуляции на комплексной плоскости (рисунок
1.1.1).
Рисунок 1.1.1 - Представление сигнальных точек на комплексной плоскости
Такое изображение обычно называют сигнальным созвездием или
пространственной диаграммой. На рисунке 1.1.2 представлены примеры сигнальных
созвездий АМ-4 (рисунок 1.1.2, а) и КАМ-16 (рисунок 1.1.2, б) радиосигналов.
Рисунок 1.1.2 - Примеры сигнальных созвездий и диаграмм фазовых переходов
Наряду с сигнальными созвездиями часто используются так называемые
диаграммы фазовых переходов, которые представляют собой графические изображения
траекторий перемещения сигнальных точек в сигнальном созвездии при переходе от
одного передаваемого символа к другому. В качестве примера на рисунке 1.1.2, в
приведена диаграмма фазовых переходов ФМ-4 радиосигнала.
.2
.3 Сравнительный анализ различных видов модуляции
Сравнительный анализ различных видов модуляции будем проводить на
основании основных показателях эффективности и качества цифровых видов
модуляции.
Спектральную эффективность различных видов модуляции принято оценивать
удельной скоростью передачи:
 , (1.2.1)
, (1.2.1)
где
 - полоса частот, необходимая для передачи сигналов с
выбранным видом модуляции, Гц.
- полоса частот, необходимая для передачи сигналов с
выбранным видом модуляции, Гц.
Величина
 представляет собой меру скорости передачи данных на
единицу ширины полосы частот, а значит, показывает, насколько эффективно
выбранный метод передачи сигналов использует ресурс полосы частот. Виды
модуляции с
представляет собой меру скорости передачи данных на
единицу ширины полосы частот, а значит, показывает, насколько эффективно
выбранный метод передачи сигналов использует ресурс полосы частот. Виды
модуляции с  < 1 принято относить к классу
спектрально-эффективных.
< 1 принято относить к классу
спектрально-эффективных.
Энергетическую
эффективность различных видов модуляции оценивают удельными энергетическими
затратами:
 . (1.2.2)
. (1.2.2)
где
 - это энергия, затрачиваемая на передачу одного бита
и описываемая произведением мощности сигнала
- это энергия, затрачиваемая на передачу одного бита
и описываемая произведением мощности сигнала  на время
передачи бита
на время
передачи бита
 -
спектральная плотность мощности шума.
-
спектральная плотность мощности шума.
Таким
образом, величина  представляет собой отношение средней мощности сигнала
к средней мощности шума (или просто отношение сигнал/шум). Чем меньше эта
величина, тем меньший энергетический потенциал
представляет собой отношение средней мощности сигнала
к средней мощности шума (или просто отношение сигнал/шум). Чем меньше эта
величина, тем меньший энергетический потенциал  радиолинии
требуется для передачи сообщений с заданными скоростью и достоверностью. Виды модуляции с низкими значениями
принято относить к классу энергетически эффективных.
радиолинии
требуется для передачи сообщений с заданными скоростью и достоверностью. Виды модуляции с низкими значениями
принято относить к классу энергетически эффективных.
Согласно теореме Шеннона предельное значение удельных энергетических
затрат составляет -1,6 дБ. Отношение средней мощности сигнала к мощности шума
(отношение сигнал/шум) может быть выражено через указанные показатели
энергетической и спектральной эффективности видов модуляции следующим образом:
 (1.2.3)
(1.2.3)
Из приведенного выражения следует, что спектрально-эффективные виды
модуляции требуют при передаче сообщений больших значений отношения сигнал/шум
и, наоборот, виды модуляции с низкой спектральной эффективностью - небольших
значений этого отношения.
Следует
отметить, что в системах цифровой передачи информации задачей приемника
является не точное воспроизведение переданного сигнала, а определение на основе
искаженного шумами сигнала, какой именно символ из конечного набора был послан
передатчиком. Поэтому показателем достоверности передачи сообщений при
использовании различных цифровых видов модуляции является вероятность ошибки
при демодуляции M-ичного символа  . Однако
этот показатель не позволяет адекватно сравнивать различные виды модуляции при
возможных вариантах выбора объема алфавита М. Поскольку потребителя обычно
интересует достоверность передачи сообщения в виде последовательности двоичных
символов, то в этой ситуации логичнее будет использование в качестве показателя
достоверности передачи вероятность ошибки на бит
. Однако
этот показатель не позволяет адекватно сравнивать различные виды модуляции при
возможных вариантах выбора объема алфавита М. Поскольку потребителя обычно
интересует достоверность передачи сообщения в виде последовательности двоичных
символов, то в этой ситуации логичнее будет использование в качестве показателя
достоверности передачи вероятность ошибки на бит  .
.
График
зависимости вероятности появления ошибочного символа  от отношения является
одним из важнейших показателей, характеризующих качество систем цифровой связи.
На рисунке 1.2.1 показан типичный «водопадоподобный» вид большинства подобных
кривых.
от отношения является
одним из важнейших показателей, характеризующих качество систем цифровой связи.
На рисунке 1.2.1 показан типичный «водопадоподобный» вид большинства подобных
кривых.

Рисунок
1.2.1 - Общий вид зависимости от
Для оценки вероятности ошибки при заданном отношении сигнал/шум в
большинстве случаев используют гауссовый интеграл ошибок
 (1.2.4)
(1.2.4)
Таким образом, выбор конкретного вида многопозиционной модуляции должен
базироваться на трех параметрах: РB, Eb/N0, Rb/W. Тот или иной выбор вида
многопозиционной модуляции направлен на достижение следующих основных целей:
максимизацию скорости передачи информации;
минимизацию вероятности ошибки на бит;
минимизацию удельных энергетических затрат;
минимизацию необходимой полосы частот;
минимизацию сложности аппаратуры формирования-обработки сигналов,
производительности вычислительных средств.
При удачном выборе вида модуляции в определенной степени удается
реализовать многие из указанных целей одновременно. Однако, как правило, в
полной мере сделать это невозможно в силу их взаимной противоречивости и
наличия ограничивающих факторов, среди которых следует указать:
теоретически минимально возможную информационную полосу, определяемую
формулой Найквиста;
пропускную способность канала связи, определяемую теоремами Шеннона;
выделенный радиочастотный диапазон;
технологические и аппаратурные ограничения.
В связи с этим выбор конкретного вида многопозиционной модуляции
предполагает компромиссное решение относительно значений указанных параметров.
В таблице 1.2.1 приведены расчетные соотношения для оценки вероятности
ошибки при заданном отношении сигнал/шум для различных видов цифровой
модуляции.
Таблица 1.2.1 - Расчётные соотношения для оценки вероятности ошибки
|
Метод модуляции
|
Расчетные соотношения
|
|
Амплитудная
|
|
|
Фазовая (при  ) )
|
|
|
Фазовая (при  ) )
|
|
|
Фазовая (при  ) )
|
|
|
Частотная
|
|
|
КАМ (для четных m)
|

|
|
КАМ (для нечетных m)
|
|
|
|
|
Амплитудная
модуляция
При амплитудной модуляции амплитуда передаваемого сигнала скачкообразно
изменяется в соответствии с символами передаваемого сообщения:
 . (1.2.5)
. (1.2.5)
Здесь
 может принимать M возможных
амплитуд, соответствующих
может принимать M возможных
амплитуд, соответствующих  возможным m-битовым символам.
возможным m-битовым символам.
На
рисунке 1.2.2 дана геометрическая иллюстрация формируемого ансамбля
амплитудно-модулированных сигналов при объёме алфавита , и  .
.

Можно заметить, что двоичные символы, создаваемые источником дискретных
сообщений, предварительно кодируются кодом Грея. В результате соседние
сигнальные точки отображают двоичные последовательности, отличающиеся одним
двоичным символом. Это свойство очень важно при рассмотрении характеристик
помехоустойчивости демодуляторов.
Согласно теореме Котельникова необходимая минимальная полоса частот
идеального канала связи равна
 . (1.2.6)
. (1.2.6)
Следовательно, спектральная эффективность амплитудной модуляции будет
определяться следующим выражением:
 . (1.2.7)
. (1.2.7)
Однако на практике спектральная эффективность амплитудной модуляции в
силу определенных трудностей при формировании сигналов с минимальной полосой
заключена в пределах:
 (1.2.8)
(1.2.8)
Фазовая
модуляция
При фазовой модуляции в соответствии с символами передаваемого сообщения
изменяется фаза гармонического колебания, поэтому передаваемый сигнал можно
записать в следующем виде
 ,(1.2.9)
,(1.2.9)
где
 (1.2.10)
(1.2.10)
Здесь
 может принимать значения из множества.
может принимать значения из множества.
где
 - произвольная начальная фаза.
- произвольная начальная фаза.
Геометрическая иллюстрация формируемого ансамбля ФМ сигналов изображена
на рисунке 1.2.3.

Рисунок 1.2.3 - Сигнальные созвездия ФМ сигналов
Здесь
сигнальные точки лежат на окружности, радиус которой определяется энергией
сигналов. Можно заметить, что с возрастанием размерность
сигнального пространства не изменяется, а, следовательно, возрастает
спектральная эффективность. Но с другой стороны, с увеличением при постоянной энергии сигналов происходит сближение
сигнальных точек. Поэтому для поддержания вероятности ошибки на прежнем уровне
приходится увеличивать энергию сигналов (увеличивать радиус окружности). Иначе
говоря, увеличение спектральной эффективности достигается за счет снижения
энергетической эффективности.
Диаграмма
фазовых переходов для ФМ-4 радиосигнала приведена на рисунке 1.2.4, а. Из этой
диаграммы видно, что, например, при переходе из точки сигнального созвездия
(+1, +1) в точку (-1, -1) осуществляется мгновенное
изменение фазы несущего колебания от значения 45° к значению минус 135°. При
изменении фазы на 180° могут возникнуть существенные изменения значений
огибающей радиосигнала, что по многим причинам является нежелательным в
цифровых системах передачи информации. В связи с этим применение находит
фазовая модуляция со смещением, на диаграмме фазовых переходов которой
отсутствуют переходы через начало координат, а, значит, отсутствуют и скачки
фазы на 180° (рисунок 1.2.4, б).
Рисунок 1.2.4 - Диаграммы фазовых переходов при фазовой модуляции
Таким
образом, при ФМ-4 и ФМ-4 со смещением максимальное изменение фазы радиосигнала
равно 180° и 90° соответственно. В настоящее время достаточно широко
используется  -квадратурная относительная фазовая модуляция, при
которой максимальный скачок фазы равен 135°, а все возможные значения
мгновенной фазы радиосигнала кратны значению . Но в
отличие от ФМ-4 при относительной фазовой модуляции каждая пара битов
определяет не полную фазу несущего колебания, а ее приращение относительно
предыдущего значения.
-квадратурная относительная фазовая модуляция, при
которой максимальный скачок фазы равен 135°, а все возможные значения
мгновенной фазы радиосигнала кратны значению . Но в
отличие от ФМ-4 при относительной фазовой модуляции каждая пара битов
определяет не полную фазу несущего колебания, а ее приращение относительно
предыдущего значения.
Диаграмма
фазовых переходов при -квадратурной относительной фазовой модуляции
приведена на рисунке 1.2.4, в. Ни одна траектория фазовых переходов не проходит
через начало координат. В результате огибающая радиосигнала имеет меньшие
провалы по сравнению с квадратурной фазовой модуляцией.
Частотная
модуляция
При частотной модуляции в соответствии с символами передаваемого
сообщения изменяется частота гармонического колебания, поэтому передаваемый
сигнал можно записать в следующем виде:
 (1.2.11)
(1.2.11)
Здесь частота колебания определяется производной по времени полной
мгновенной фазы:
 (1.2.12)
(1.2.12)
Из этого выражения видно, что при скачкообразном изменении мгновенной
частоты фаза будет изменяться линейно. Поэтому частотную модуляцию можно
рассматривать как фазовую модуляцию с непрерывным гладким изменением фазы.
Манипуляция с минимальным сдвигом (ММС) может рассматриваться как фазовая
или как частотная модуляция с непрерывной фазой.
Основная
особенность этого способа модуляции состоит в том, что приращение фазы несущего
колебания на интервале времени, равном длительности одного символа  , всегда равно 90° или минус 90° в зависимости от
знаков символов модулирующего сигнала. Например, фаза несущего колебания в
начале очередного импульса модулирующего сигнала равна
, всегда равно 90° или минус 90° в зависимости от
знаков символов модулирующего сигнала. Например, фаза несущего колебания в
начале очередного импульса модулирующего сигнала равна  ; далее, фаза несущего колебания, линейно нарастая к
концу этого импульса, достигает значения
; далее, фаза несущего колебания, линейно нарастая к
концу этого импульса, достигает значения  , или,
линейно убывая, к концу импульса достигает значения
, или,
линейно убывая, к концу импульса достигает значения  . Поскольку на интервале каждого очередного импульса
модулирующего сигнала мгновенная фаза несущего колебания, отклоняясь от фазы
немодулированного гармонического колебания, изменяется линейно, увеличиваясь
или уменьшаясь, то мгновенная частота такого радиосигнала будет изменяться
скачками. Таким образом, ММС сигнал является частным случаем ЧМ сигнала с
частотами
. Поскольку на интервале каждого очередного импульса
модулирующего сигнала мгновенная фаза несущего колебания, отклоняясь от фазы
немодулированного гармонического колебания, изменяется линейно, увеличиваясь
или уменьшаясь, то мгновенная частота такого радиосигнала будет изменяться
скачками. Таким образом, ММС сигнал является частным случаем ЧМ сигнала с
частотами
 (1.2.13)
(1.2.13)
Этот вид модуляции можно трактовать как квадратурную фазовую модуляцию, в
которой модулирующие импульсы вместо прямоугольной формы имеют синусоидальную.
Такая форма модулирующих импульсов приводит к плавному изменению фазы, поэтому
на диаграмме фазовых переходов отсутствуют скачки фазы, характерные для ФМ-4
сигналов, и изменения фазы от одного значения к другому происходят по линейному
закону.
Квадратурная
амплитудная модуляция
Ранее
были рассмотрены многопозиционные АМ и ФМ, которые могут быть использованы для
передачи  битов информации с помощью одного сигнала. Лучшие показатели
эффективности можно получить, если для передачи символов сообщения модулировать
сразу два параметра: амплитуду и фазу. В этом случае сигнальные точки будут
размещаться в двумерном сигнальном пространстве более рационально (рисунок
1.2.5).
битов информации с помощью одного сигнала. Лучшие показатели
эффективности можно получить, если для передачи символов сообщения модулировать
сразу два параметра: амплитуду и фазу. В этом случае сигнальные точки будут
размещаться в двумерном сигнальном пространстве более рационально (рисунок
1.2.5).
Рисунок 1.2.5 - Сигнальные созвездия КАМ-4 и КАМ-16 сигналов
Передаваемый сигнал при такой модуляции состоит из двух квадратурных
несущих, модулированных по амплитуде многоуровневыми последовательностями
импульсов. По этой причине этот вид модуляции носит название квадратурной
амплитудной модуляции (КАМ).
В общем случае КАМ сигнал можно представить в виде
 (1.2.14)
(1.2.14)
Из теории связи известно, что при равном числе точек в сигнальном
созвездии спектр сигналов КАМ идентичен спектру сигналов ФМ. Однако
помехоустойчивость систем ФМ и КАМ различна. При большом числе точек сигналы
системы КАМ имеют лучшие характеристики, чем системы ФМ. Основная причина этого
состоит в том, что расстояние между сигнальными точками в системе ФМ меньше
расстояния между сигнальными точками в системе КАМ. Расстояния d между
соседними точками сигнальных созвездий в системах ФМ и КАМ (рисунок 1.2.6) с m уровнями модуляции и числом фаз M определяются выражениями:
 . (1.2.15)
. (1.2.15)

Рисунок 1.2.6 - Сигнальные созвездия КАМ-16 и ФМ-16 сигналов
Из приведённых выражений следует, что при увеличении значения М и одном и
том же уровне мощности системы КАМ предпочтительнее систем ФМ, а также в
сравнение с другими видами модуляции:
оптимальными сигналами среди рассмотренных в отсутствие специальных
требований являются сигналы с цифровыми модуляциями ФМ-4 и КАМ-4;
при условии равнозначности помехозащищенности и эффективности
использования полосы оптимальным является сигнал с цифровой модуляцией ЧМ. Если
дать небольшой допуск, то выбор может быть расширен сигналами ФМ-4 и КАМ-4;
оптимальными с точки зрения применения в системах с повышенной
устойчивостью к импульсным и селективным помехам являются сигналы ФМ-4 и КАМ-4.
Опираясь на данные выводы, из представленных спектрально-эффективных
сигналов с современными цифровыми видами модуляции, на мой взгляд, более
оптимальным является сигнал КАМ-4.
.4 Обзор устройств и разработка функциональной схемы демодулятора
Как отмечалось ранее, в спектре сигналов с КАМ-4 не имеется информации о
несущей, следовательно, несущая определяется из принятого сигнала посредством
некоторого нелинейного преобразования и фильтрации. Поэтому в инженерной
практике широкое распространение получили квазикогерентные структуры
демодуляторов, отличающиеся оптимальных когерентных алгоритмов тем, что в их
составе находятся системы восстановления когерентной несущей (СВКН), которые
строятся на основе систем фазовой автоподстройки частоты ФАПЧ, с включением в
их состав некоторых блоков дополнительных нелинейных преобразований. При
разработке функциональной схемы демодулятора восстановление несущего колебания
будем рассматривать как задачу оптимального оценивания фазы сигнала,
пораженного помехой.
Проведем разработку функциональной схемы квазикогерентного демодулятора,
построенного на основе системы ФАПЧ, выполняющей функции узкополосного
следящего фильтра. При разработке будем полагать, что тактовая синхронизация
демодулятора установлена. В связи с этим, для получения функциональной схемы
демодулятора необходимо рассмотреть оптимальный алгоритм квазикогерентного
приема дискретных сигналов с КАМ-4.
Термин «оптимальный прием» подразумевает выбор того или иного критерия
оптимальности и осуществление на его основе статистического синтеза алгоритмов
оценки информационного параметра принимаемого сигнала. Результатом применения
данного подхода является оптимальный алгоритм приема и оценка его
помехоустойчивости.
Полученный в результате статистического синтеза оптимальный алгоритм
приема регламентирует структуру и параметры демодулятора системы связи,
обеспечивая наименьшие погрешности выделения информационного параметра. При
этом оптимальность полученного алгоритма жестко связана с оговоренными
условиями приема и выбранным критерием оптимальности.
Рассмотрим оптимальный алгоритм квазикогерентного приема дискретных
сигналов КАМ-4. Данные вычисления основаны на задачах совместной фильтрации
непрерывного и неограниченного количества дискретных марковских процессов. В
частности, их конкретизация для одного непрерывного и двух дискретных
марковских процессов позволила получить оптимальные алгоритмы приема сигналов
КАМ-4, что и будет показано ниже.
Запишем сигнал на входе демодулятора цифровой системы передачи информации
в виде:
 (1.3.1)
(1.3.1)
где
 - сигнал, зависящий от непрерывного λ(t) и двух дискретных
- сигнал, зависящий от непрерывного λ(t) и двух дискретных  ,
,  параметров;
параметров;  -
нормальный случайный процесс с нулевым средним и функцией корреляции
-
нормальный случайный процесс с нулевым средним и функцией корреляции , где N0 -спектральная плотность мощности шума; процессы λ(t) и
, где N0 -спектральная плотность мощности шума; процессы λ(t) и  ,
,  статистически независимы,
статистически независимы,  - несущая частота сигнала, константа, известная в
точке приема.
- несущая частота сигнала, константа, известная в
точке приема.
Проведем разработку функциональной схемы квазикогерентного демодулятора,
построенного на основе системы ФАПЧ, выполняющей функции узкополосного
следящего фильтра.
Рисунок
1.1 - Функциональная схема демодулятора
С выхода линейного тракта приемника на вход демодулятора поступает сигнал
вида 1.3.1. В демодуляторе случайная блуждающая фаза φ(t) принимаемого сигнала оценивается
системой фазовой автоматической подстройки частоты, выполняющей функции
узкополосного следящего фильтра. В ее состав входят синхронные (фазовые)
детекторы (СД), подстраиваемый генератор (ПГ), безынерционный усилитель,
алгебраический сумматор (Σ) и фазовращатель на π/2, формирующие квадратуры опорного
колебания. Роль интегрирующих элементов в схеме в составе СД играют фильтры
нижних частот (ФНЧ), выделяющие постоянные составляющие произведения соседних
посылок сигналов. Синхронные детекторы и пороговые устройства (ПУ) с нулевым
пороговым уровнем (h=0) служат для
формирования в текущем времени оценок дискретных параметров.
Согласованная фильтрация в демодуляторе требует, чтобы суммарная ФЧХ
фильтров модулятора и демодулятора была линейной. Для этого обычно требуют, чтобы
каждый фильтр имел линейную ФЧХ. Поэтому, как отмечалось ранее, в качестве ФНЧ
в демодуляторе должны использоваться формирующие фильтры с косинусоидальным
сглаживанием АЧХ и линейной ФЧХ.
Таким
образом, оптимальная структура демодулятора содержит устройства
квазикогерентной оценки дискретных параметров, использующие в качестве опорных
колебаний  и
и  .
Формирование же опорного колебания осуществляется системой ФАПЧ.
.
Формирование же опорного колебания осуществляется системой ФАПЧ.
. Описание модулятора и демодулятора. Особенности формирования
сигнала КАМ-4
Сигналы квадратурной амплитудной манипуляции (quadrature amplitude
modulation - QAM) могут быть представлены на интервале посылки [0,Т] с помощью
следующей обобщенной записи:
модулятор передача сигнал цифровой
 (2.1)
(2.1)
где d- энергетическая база сигнала s(t); cos[w0t + φ(t)]
и sin[w0t + φ(t)]
-базовые квадратурные
компоненты сигнала s(t); w0 - номинальное значения частоты сигнала; φ(t)
- случайная блуждающая
фаза сигнала. Информационным параметром сигнала КАМ является амплитуда,
косинусная и синусная квадратурные компоненты которой  ;
;  зависят от векторов информационных
дискретных параметров
зависят от векторов информационных
дискретных параметров  и
и  . Дискретные параметры
. Дискретные параметры  и
и  являются независимыми случайными
величинами, с двумя возможными значениями [+1; -1] каждая (в системах связи
применяются адекватные обозначения значений дискретных параметров в виде
[1;0]). Изменение значений дискретных параметров может происходить только на
границах посылок сигнала s(t). На интервале действия посылки [0,Т] сигнала
значения дискретных параметров неизменны.
являются независимыми случайными
величинами, с двумя возможными значениями [+1; -1] каждая (в системах связи
применяются адекватные обозначения значений дискретных параметров в виде
[1;0]). Изменение значений дискретных параметров может происходить только на
границах посылок сигнала s(t). На интервале действия посылки [0,Т] сигнала
значения дискретных параметров неизменны.
Конкретизируем выражение (2.1) для анализируемого далее сигнала КАМ-4 :
 (2.2)
(2.2)

Рисунок
2.1- Векторная диаграмма для сигналов КАМ-4
На
рисунке 2.1 показана векторная диаграмма (сигнальное созвездие) для сигнала
КАМ-4 (QPSK), зависящего от двух дискретных параметров  . Число возможных вариантов посылок равно четырем. На
векторной диаграмме все возможные варианты посылок сигнала представляются
векторами, исходная координата которых находится в начале координат плоскости
[I,Q], а координаты окончания векторов определяются нанесенными на диаграмму
точками (•). Так, на рисунке 2.1 в качестве примеров показаны вектор посылки,
соответствующий значениям дискретных параметров
. Число возможных вариантов посылок равно четырем. На
векторной диаграмме все возможные варианты посылок сигнала представляются
векторами, исходная координата которых находится в начале координат плоскости
[I,Q], а координаты окончания векторов определяются нанесенными на диаграмму
точками (•). Так, на рисунке 2.1 в качестве примеров показаны вектор посылки,
соответствующий значениям дискретных параметров  -
сплошной линией, и вектор посылки, соответствующий значениям дискретных
параметров
-
сплошной линией, и вектор посылки, соответствующий значениям дискретных
параметров  - пунктирной линией.
- пунктирной линией.
На
диаграмме (рис.2.1), приведены значения квадратурных ординат сигналов КАМ (ряд значений сверху и справа от диаграммы),
а также соответствующие значениям дискретных параметров коды посылки NI и NQ (в
обозначениях "1" и "0" - слева и снизу от диаграмм).
квадратурных ординат сигналов КАМ (ряд значений сверху и справа от диаграммы),
а также соответствующие значениям дискретных параметров коды посылки NI и NQ (в
обозначениях "1" и "0" - слева и снизу от диаграмм).
Для
того чтобы при приеме многопозиционных сигналов снизить вероятность ошибочных
решений сразу по нескольким символам дискретного сообщения, в инженерной
практике при формировании КАМ сигналов применяют так называемое манипуляционное
кодирование. Оно заключается в том, что в передатчике ЦСПИ применяют
манипуляционный кодер при расчете значений дискретных параметров сигнала , из
исходного скалярного информационного ИКМ потока данных.
2.1 Описание работы модулятора
Алгоритм манипуляционного кодирования включен непосредственно в алгоритм
формирования сигнала в модуляторе ЦСПИ.
Сигнал
КАМ-4 (QPSK) на интервале длительности посылки [0,T] переносит 2 бита
информации . Несущая на выходе модулятора может принимать при
этом четыре значения фазы, следовательно, и на входе должно быть реализовано
четыре возможных состояния. Перед модулятором бинарные входные данные
объединяются в группы из двух бит каждая, называемые дибитами. В модуляторе
каждые два бита генерируют одну из четырех возможных фаз (0, 90, 180, 270°).
Поэтому каждой паре бит на входе модулятора соответствует одно изменение фазы
несущей на выходе. Используются следующие сдвиги фаз для кодировки: 0° для
сочетания бит 00; 90° для 01; 180° для 10; 270° для 11. Сигнал КАМ-4 образован
двумя, одновременно передаваемыми в единой полосе частот W,
сигналами PSK, отличающимися квадратурным характером своих несущих
колебаний.
. Несущая на выходе модулятора может принимать при
этом четыре значения фазы, следовательно, и на входе должно быть реализовано
четыре возможных состояния. Перед модулятором бинарные входные данные
объединяются в группы из двух бит каждая, называемые дибитами. В модуляторе
каждые два бита генерируют одну из четырех возможных фаз (0, 90, 180, 270°).
Поэтому каждой паре бит на входе модулятора соответствует одно изменение фазы
несущей на выходе. Используются следующие сдвиги фаз для кодировки: 0° для
сочетания бит 00; 90° для 01; 180° для 10; 270° для 11. Сигнал КАМ-4 образован
двумя, одновременно передаваемыми в единой полосе частот W,
сигналами PSK, отличающимися квадратурным характером своих несущих
колебаний.
Исходная
последовательность двоичных символов длительностью Т при помощи регистра сдвига
(демультиплексора) разделяется на нечетные α и четные β
импульсы, которые поступают на входы
формирователей манипулирующих импульсов (ФМИ) соответственно квадратурного (cosωt) и синфазного (sinωt) каналов. На выходах ФМИ образуются последовательности биполярных
импульсов α
и β с амплитудой ±Um и длительностью 2Т, которые поступают на входы
канальных перемножителей, где они независимо друг от друга модулируют по
амплитуде два одинаковых несущих колебания, сдвинутых по фазе на 90о, т.е.
находящихся в квадратуре. В результате, на их выходах формируются двухфазные
(0, π)
ФМ колебания. После суммирования они
образуют сигнал КАМ-4(КАМ-4,QPSK).
Рисунок 2.1.1 - Схема модулятора сигналов КАМ-4
При одновременной смене символов в обоих каналах модулятора (с 10 на 01,
или с 00 на 11) в сигнале КАМ-4 происходит скачок фазы на 180° (π).
Такие скачки фазы
вызывают паразитную амплитудную модуляцию огибающей сигнала. В результате этого
при прохождении сигнала через узкополосный фильтр возникают провалы огибающей
несущего колебания до нуля. Такие изменения сигнала нежелательны, поскольку
приводят к увеличению энергии боковых полос и помех в канале связи.
По преобразованию Фурье, спектр сигнала, содержащего скачки, затухает с
ростом частоты медленно - пропорционально 1/w. Чтобы сделать спектр более
компактным, необходимо обеспечить гладкость сигнала (то есть непрерывность
сигнала и, возможно, некоторого количества его производных), а это, в свою
очередь, означает гладкость модулирующей функции. Следовательно, вместо
скачкообразного изменения параметров модуляции необходимо выполнить
интерполяцию между точками созвездия, соответствующими последовательным
символам.
Фильтр, используемый для интерполяции, определяет форму спектра
КАМ-сигнала, поэтому его называют формирующим фильтром (shaping filter), а сам
процесс интерполяции - формированием спектра (spectral shaping).
Скачкообразное изменение параметров модуляции можно рассматривать как
использование формирующего фильтра с прямоугольной импульсной характеристикой,
длительность которой равна символьному интервалу.
При приеме такого сигнала в качестве ФНЧ необходимо использовать такой же
фильтр, как для формирования спектра. Таким образом, последовательное
использование двух SQRT-фильтров с косинусоидальным сглаживанием позволяет
избавиться от скачков в спектре и получить ограниченный по полосе сигнал.
.2 Демодуляция сигнала КАМ-4
Демодуляция есть процесс выделения информационного символа основной
полосы из принимаемого несущего колебания. В этом смысле процесс демодуляции
является обратным процессу модуляции. Все известные методы демодуляции с точки
зрения априорных сведений о принимаемом сигнале можно разделить на два больших
класса: когерентные и квазикогерентные (некогерентные).
Метод демодуляции, для применения которого необходимо знать в точке
приема (в приемнике) истинные значения частоты и начальной фазы
высокочастотного несущего колебания называется когерентным. То есть при
когерентной демодуляции в точке приема известны все параметры принимаемого
сигнала, за исключением информационных дискретных параметров. Это позволяет до
начала приема сформировать в демодуляторе опорные колебания и осуществить
когерентное детектирование информационных параметров. Данный метод обладает
наибольшей помехоустойчивостью.
В реальных практических приложениях постановка задачи приема усложнена
тем, что, наряду с неизвестными информационными параметрами, в сигнале
присутствуют неинформационные параметры, имеющие также случайный характер.
Такие параметры как частота и фаза принимаемого сигнала являются случайными
процессами. Поэтому невозможно априори сформировать в приемнике опорные
колебания, а значит невозможно применить на практике когерентные алгоритмы
приема.
При построении ЦСПИ широкое распространение получили квазикогерентные
структуры демодуляторов, для которых отличающиеся когерентных тем, что в их
составе находятся системы восстановления когерентной несущей (СВКН). СВКН
предназначены для формирования опорных колебаний непосредственно по
принимаемому сигналу. Процессы формирования опорных колебаний и
квазикогерентного детектирования информационных параметров производятся при
приеме сигнала одновременно, в текущем масштабе времени. СВКН строятся на
основе систем фазовой автоподстройки частоты ФАПЧ, с включением в их состав
некоторых блоков дополнительных нелинейных преобразований.
При практической реализации любых способов демодуляции принимаемый
высокочастотный сигнал обычно фильтруется полосовым фильтром, усиливается и
переносится на некоторую промежуточную частоту (супергетеродинный прием). Эти
действия производятся в линейном тракте приемника. Сигнал на промежуточной
частоте имеет точно такую же спектральную плотность мощности, как и исходный
радиосигнал на входе приемника. В дальнейшем будем полагать, что подобные
операции выполнены и на входе устройства демодуляции имеет место несущее
колебание промежуточной частоты.
Для каждого способа модуляции существует достаточно много способов
демодуляции. Они отличаются друг от друга преобразованиями входного несущего
колебания, которые необходимо выполнить для выделения информационных символов,
сложностью их практической реализации, качеством демодуляции при различных
условиях приема.
Со спектральной точки зрения проблема формирования опорного колебания
непосредственно по принимаемому КАМ-4 сигналу заключается в том, что в спектре
данного сигнала (при манипуляции информационной фазы на π/2
радиан) отсутствует
спектральная линия на частоте несущей. Вследствие этого прямо использовать
систему ФАПЧ для выделения и фильтрации опорного колебания нельзя. С точки
зрения временных представлений проблема заключается в том, что фаза КАМ-4
сигнала от посылки к посылке изменяется на 90° случайным образом. Подавая
сигнал КАМ-4 на вход инерционной системы ФАПЧ, получим, что она постоянно будет
перестраивать по фазе, пытаясь осуществить привязку к фазе то одной, то другой
посылки КАМ-4 сигнала. Однако необходимо получить опорное колебание,
привязанное по фазе к посылке сигнала, соответствующей значению информационного
параметра α и β.
Отметим, что, несмотря на отсутствие в спектре КАМ-4 сигнала несущего
колебания, информация о частоте и фазе несущей КАМ-4 сигнала заложена в боковых
составляющих спектра сигнала. Поэтому для формирования опорного колебания
необходимо в СВКН осуществить дополнительные нелинейные преобразования над
принимаемым сигналом, с целью предварительного восстановления несущего
колебания и последующей его фильтрации узкополосной системой ФАПЧ.
СВКН квазикогерентного демодулятора должна обеспечивать возможность
перестройки в необходимых пределах частоты и фазы формируемого опорного
колебания, минимальные фазовые погрешности слежения за фазой  КАМ-4 сигнала, достаточное
быстродействие при вхождении в синхронный режим работы, а также эффективную
фильтрацию опорного колебания на фоне аддитивных помех.
КАМ-4 сигнала, достаточное
быстродействие при вхождении в синхронный режим работы, а также эффективную
фильтрацию опорного колебания на фоне аддитивных помех.
С точки зрения обеспечения требуемого качества фильтрации опорного
колебания, в условиях значительной нестабильности частоты принимаемого сигнала
(характерной для высокоскоростных ЦСПИ), перспективным является применение
систем ФАПЧ с переменными структурой и параметрами.
Опираясь на данные заключения, в дальнейшем спроектируем схему
оптимального квазикогерентного демодулятора сигналов КАМ-4.
.3 Обоснование структурной схемы системы связи
Под
цифровой системой передачи информации (ЦСПИ) понимают упорядоченную
совокупность технических средств и среды распространения, обеспечивающую
передачу информации в цифровой форме из одного пункта пространства в другой. С
учетом особенностей формирования и приема сигнала с КАМ-4 приведем структурную
схему системы связи (рисунок 2.3.1), предназначенную для передачи речевых
сообщений, передаваемых в виде сигналов с КАМ-4, где λ(t) - дискретное информационное сообщение;  и
и  -
информационные параметры формируемого сигнала
-
информационные параметры формируемого сигнала  ; r(t) -
сигнал на входе демодулятора (1.20); ω0 - несущая частота сигнала, константа, известная в точке приема; φ(t) - случайная блуждающая фаза сигнала;
; r(t) -
сигнал на входе демодулятора (1.20); ω0 - несущая частота сигнала, константа, известная в точке приема; φ(t) - случайная блуждающая фаза сигнала;  и
и  - оценки
информационных параметров; λ*(t) -
оценка дискретного сообщения.
- оценки
информационных параметров; λ*(t) -
оценка дискретного сообщения.
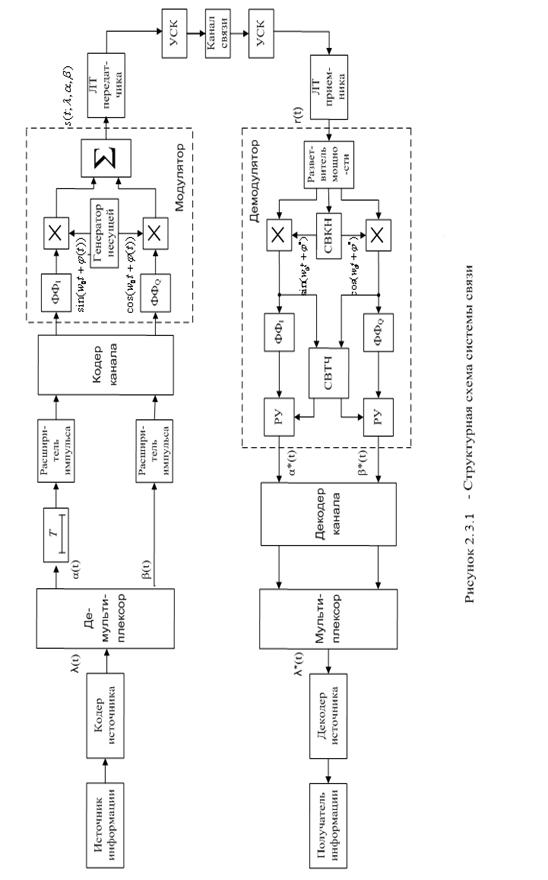
Кодер источника предназначен для устранения информационной избыточности в
передаваемых информационных сообщениях. В данной системе сигнал требуется
преобразовать в последовательность положительных и отрицательных электрических
импульсов со значениями +1 или −1.
Демультиплексор осуществляет разделение цифрового сигнала на несколько
составляющих. В данном случае он разделяет исходный ИКМ поток
λ(t) на два ИКМ сигнала α
и β
(по принципу «четные» и
«нечетные» символы λ(t)
исходного ИКМ потока).
Устройство задержки обеспечивает временную задержку сигнала на один или
несколько тактов, т. е. на одну или несколько длительностей элементарного импульса
Tb.
Расширитель импульса осуществляет расширение ненулевых импульсов до
длительности (2 Tb).
Кодер канала является одним из важнейших структурных элементов
модулятора, и служит для формирования модулирующего сигнала, непосредственно
влияющего на носитель. Кодер канала состоит из двух последовательно включенных
кодеров, работающих по несвязанным между собой алгоритмам. Первый из них
предназначен для помехоустойчивого кодирования, с целью минимизации уязвимости
информационного сообщения от искажающих факторов и помех, возникающих в трактах
ЦСПИ и при передаче сигнала по каналу связи. Второй кодер, работающий по
алгоритму дифференциального кодирования, обеспечивает корректную работу
квазикогерентного демодулятора ЦСПИ. Необходимость применения такого кодера
вызвана тем, что в демодуляторе в процессе восстановления и фильтрации опорного
колебания по принимаемому сигналу, СВКН может привязаться по фазе к любой из
посылок сигнала. При этом такой выбор носит случайный характер, не позволяющий
его идентифицировать в процессе приема. Кроме того, под действием входных
шумовых флуктуаций в системе ФАПЧ, входящей в состав СВКН, в процессе приема
может произойти перескок фазы на л радиан. При этом система ФАПЧ осуществит
«перепривязку» по фазе, т.е. изменит полярность формируемого опорного
колебания.
Работа модулятора была описана ранее.
Формирующие фильтры (ФФ) обеспечивают максимально плоскую форму
амплитудного спектра сигнала в полосе частот излучения и резкий спад
интенсивности его амплитудного спектра вне заданной полосы излучения, а также
вносят минимальные искажения в фазовый спектр фильтруемого сигнала s(t).
С
выхода модулятора сформированный сигнал поступает
в линейный тракт (ЛТ) передатчика, где при необходимости осуществляется
преобразование частоты сигнала вверх на несущую частоту ЦСПИ, фильтрация
побочных продуктов преобразования частоты, а также усиление сигнала до
требуемого уровня мощности излучения передатчика.
Подготовленный
для передачи сигнал ЦСПИ, через устройство (УСК) сопряжения передатчика с
каналом (в случае радиоканала через антенно-фидерное устройство - АФУ)
поступает в канал связи.
С
выхода канала связи сигнал через устройство (УСК) сопряжения с каналом (в
случае радиоканала через АФУ) поступает на вход линейного тракта приемника, где
осуществляется частотная селекция принимаемого сигнала, преобразование его
частоты вниз на промежуточное значение fпр, фильтрация
побочных и паразитных продуктов преобразования частоты, а также усиление и
стабилизация мощности принимаемого сигнала.
Разветвитель
мощности направляет входной сигнал КАМ-4 на схемы перемножения синфазной и
квадратурной компонент сигнала и на схему восстановления когерентной несущей
(СВКН).
Схема
восстановления тактовой частоты (СВТЧ) используется для формирования
последовательности стробирующих импульсов с частотой следования символов,
моменты появления которых должны совпадать с моментами достижения максимального
значения выходными сигналами интегратора.
В
моменты появления стробирующих импульсов в многопороговых решающих устройствах
(РУ) производится сравнение текущего отсчета выходного сигнала ФФ с возможными
значениями, соответствующими алфавиту символов, и выносится решение в пользу
ближайшего.
Работа
декодера канала противоположна работе кодирующего устройства. На его выходе
символы переданного сигнала КАМ-4 представлены в двоичном параллельном коде.
Мультиплексор
(устройство объединения) из входных последовательностей и формирует
групповой сигнал λ*(t) и преобразует полученную двоичную комбинацию в
последовательный код.
Блок
получателя информации по аналогии с источником подразумевает в своем составе
устройство, осуществляющее цифро-аналоговое преобразование (ЦАП) группового ИКМ
сигнала λ*(t).
Заключение
модулятор передача сигнал цифровой
В процессе выполнения курсового был рассмотрен демодулятор для системы
связи, обеспечивающей прием и передачу речевых сообщений, передаваемых в виде сигналов
с четырехпозиционной квадратурной амплитудной модуляцией. Выполнен
сравнительный анализ различных видов модуляции. Произведен обзор устройств этой
системы. Подробно описана модуляция и демодуляция для выбранного мною сигнала
КАМ-4.
В курсовом проекте был обоснован выбор структурной схемы системы связи,
принцип действия и назначение входящих в нее элементов. Разработана
функциональная схема демодулятора, приведено подробное описание принципа
работы.
Также в работе рассмотрены особенности формирования сигнала КАМ-4.
Список использованных источников
1. Б.
Скляр «Цифровая связь. Теоретические основы и практическое применение». М.: Вильямс - 2003.
2. Томаси
У. Электронные системы связи. - М.: Техносфера, 2007. - 1360 с.
3. Гаранин
М.В., Журавлев В.И., Кунегин С.В. Системы и сети передачи информации: Учеб.
пособие. - М.: Радио и связь, 2001. - 336 с.
4. Л.
Н. Волков, М. С. Немировский, Ю. С. Шинаков «Системы цифровой радиосвязи». М.: Экотрендз 2005.
. Мартиросов
В.Е. Теория и техника приема дискретных сигналов ЦСПИ: Учебное пособие. - М.:
Радиотехника, 2005. - 144 с.
. Дятлов
А. П., Дятлов П. А. Руководство к циклу лабораторных работ «Моделирование
демодуляторов фазоманипулированных сигналов». -Таганрог: Изд-во ТТИ ЮФУ, 2007.
-53 с.
7. В.
А. Алехин, О. Ю. Евдокимов, Ю. Ф. Евдокимов «Методические указания по
дипломному проектированию». - Таганрог Изд-во ТРТУ, 2005.